Franch in Thesis

of 147
-
Upload
robert-colban -
Category
Documents
-
view
233 -
download
0
Transcript of Franch in Thesis
-
8/12/2019 Franch in Thesis
1/147
-
8/12/2019 Franch in Thesis
2/147
.
-
8/12/2019 Franch in Thesis
3/147
To Fidelia,
my sister Chiara,
my mother Gianna
and my father Roberto.
-
8/12/2019 Franch in Thesis
4/147
.
-
8/12/2019 Franch in Thesis
5/147
Contents
List of Figures v
List of Tables ix
List of Symbols xi
Abstract xiii
Acknowledgements xv
1 INTRODUCTION 1
1.1 Requirements of a reliability method for seismic risk assessment . . . 2
1.2 Engineering methods . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 State-of-the-art methods . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 FORM SOLUTION OF RANDOM VIBRATION PROBLEMS 11
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Models of the seismic action . . . . . . . . . . . . . . . . . . . . . . . 12
2.2.1 Random process modelling . . . . . . . . . . . . . . . . . . . . 13
2.2.1.1 Stationary models: the Kanai-Tajimi and Clough-
Penzien models . . . . . . . . . . . . . . . . . . . . . 13
i
-
8/12/2019 Franch in Thesis
6/147
2.2.1.2 Non-stationary models: periodic processes . . . . . . 16
2.2.1.3 Non-stationary models: Pulse-type processes . . . . . 19
2.3 Pulse-type discretization as a key to problem reformulation . . . . . . 22
2.3.1 The elementary excursion event for linear and non-linear systems 23
2.3.2 Design-point excitation . . . . . . . . . . . . . . . . . . . . . . 27
2.3.3 From the elementary excursion events to the first excursion
event: non-linear systems and mean out-crossing rate . . . . . 31
2.3.4 Linear systems: the simulation alternative . . . . . . . . . . . 36
3 LIMIT-STATE FUNCTION GRADIENT: RESPONSE SENSITIV-
ITY ANALYSIS 41
3.1 Limit-state functions defined in terms of a finite element model response 41
3.2 Equations of the response sensitivity . . . . . . . . . . . . . . . . . . 43
3.3 Shear-type structures with differential laws . . . . . . . . . . . . . . . 48
3.3.1 Kinematic relations . . . . . . . . . . . . . . . . . . . . . . . . 48
3.3.2 Differential model of hysteresis: Bouc-Wen . . . . . . . . . . . 49
3.3.3 Sample sensitivity time-histories . . . . . . . . . . . . . . . . . 56
3.4 Fiber models for reinforced concrete frames . . . . . . . . . . . . . . . 58
3.4.1 Displacement (Stiffness) Based Elements . . . . . . . . . . . . 60
3.4.1.1 Formulation . . . . . . . . . . . . . . . . . . . . . . . 60
3.4.1.2 Response Sensitivity . . . . . . . . . . . . . . . . . . 61
3.4.2 Force (Flexibility) Based Elements . . . . . . . . . . . . . . . 63
3.4.2.1 Formulation . . . . . . . . . . . . . . . . . . . . . . . 63
3.4.2.2 Response Sensitivity . . . . . . . . . . . . . . . . . . 63
3.4.3 Constitutive Derivatives . . . . . . . . . . . . . . . . . . . . . 65
ii
-
8/12/2019 Franch in Thesis
7/147
3.5 Stress gradient for non-differential constitutive laws . . . . . . . . . . 69
3.5.1 Bilinear hysteretic law . . . . . . . . . . . . . . . . . . . . . . 71
3.5.1.1 Sample sensitivity time-histories . . . . . . . . . . . 73
4 APPLICATIONS 77
4.1 Simple model of a reinforced concrete building . . . . . . . . . . . . . 77
4.1.0.2 Ground motion . . . . . . . . . . . . . . . . . . . . . 78
4.1.0.3 Performance criterion . . . . . . . . . . . . . . . . . 79
4.1.0.4 Critical or least favorable excitation . . . . . . . . . 80
4.1.0.5 Effect of structure inelasticity and randomness . . . . 82
4.1.0.6 Results . . . . . . . . . . . . . . . . . . . . . . . . . 84
4.2 Reinforced concrete bridge . . . . . . . . . . . . . . . . . . . . . . . . 85
4.2.0.7 Bridge description and finite element modelling . . . 85
4.2.0.8 Ground motion and deterministic response . . . . . . 86
4.2.0.9 Results . . . . . . . . . . . . . . . . . . . . . . . . . 88
4.2.0.10 Design point excitations . . . . . . . . . . . . . . . . 89
5 CONCLUSIONS 91
5.1 Summary and Conclusions . . . . . . . . . . . . . . . . . . . . . . . . 91
5.2 Indications for future research . . . . . . . . . . . . . . . . . . . . . . 93
A RELIABILITY THEORY ESSENTIALS 95
A.1 Time-invariant reliability methods . . . . . . . . . . . . . . . . . . . . 95
A.1.1 The problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
A.1.2 Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
A.1.2.1 Montecarlo method . . . . . . . . . . . . . . . . . . . 97
iii
-
8/12/2019 Franch in Thesis
8/147
A.1.2.2 Importance sampling method . . . . . . . . . . . . . 98
A.1.3 FORM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
A.1.3.1 Component problem . . . . . . . . . . . . . . . . . . 100
A.1.3.2 System problem: general. . . . . . . . . . . . . . . . 103
A.1.3.3 System problem: FORM approximation. . . . . . . . 106
A.2 Random vibrations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
A.2.1 Random processes . . . . . . . . . . . . . . . . . . . . . . . . 107
A.2.1.1 Random process definition . . . . . . . . . . . . . . . 107A.2.1.2 Random process probabilistic characterization . . . . 107
A.2.1.3 Stationary (or homogeneous) random process . . . . 110
A.2.1.4 Spectral decomposition of a stationary random process111
A.2.1.5 Poisson counting process . . . . . . . . . . . . . . . . 112
A.2.2 Input-output relations in the frequency-domain . . . . . . . . 114
A.2.2.1 Deterministic input . . . . . . . . . . . . . . . . . . . 114
A.2.2.2 Random input . . . . . . . . . . . . . . . . . . . . . 116
A.2.2.3 Two related random processes . . . . . . . . . . . . . 118
A.2.3 Crossing theory . . . . . . . . . . . . . . . . . . . . . . . . . . 119
BIBLIOGRAPHY 121
iv
-
8/12/2019 Franch in Thesis
9/147
List of Figures
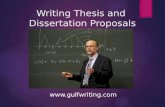
2-1 Clough-Penzien power spectra for different soil conditions. . . . . . . 15
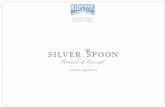
2-2 Left: Discrete Clough-Penzien one-sided power spectrum for medium
soil conditions; Right: Autocorrelation function corresponding to the
discrete PSD beside. . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
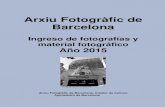
2-3 Discrete Evolutionary one-sided power spectrum for medium soil con-
ditions (Clough-Penzien stationary spectrum modulated by an expo-
nential envelope). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2-4 Random process decomposition. . . . . . . . . . . . . . . . . . . . . . 24
2-5 Process excursions as half-spaces: (a) exact for linear systems; (b)
approximate for non linear systems. . . . . . . . . . . . . . . . . . . . 26
2-6 Design point for a linear system under stationary Gaussian white
noise excitation: (a) unit-impulse response function; (b) variance of
the response; (c) design-point excitation; (d) design-point response. . 30
2-7 White noise sample.
31
2-8 Reliability index evolution with time. . . . . . . . . . . . . . . . . . . 31
2-9 Crossing rate as parallel event (FORM approximation). . . . . . . . . . . 35
2-10 Magnitude crossing as up-crossing ofbk plus down-crossing ofbk. . . . 37
2-11 Sampling densities: (a) Proposed ISD; (b) Multimodal Gaussian. . . . 38
v
-
8/12/2019 Franch in Thesis
10/147
2-12 Convergence of probability estimate with number of trials (Results
for a six-story three-bay moment resisting frame under seismic load
reproduced from the example application in [4]), the circles indicate
Montecarlo results for 10,000 samples. . . . . . . . . . . . . . . . . . 40
3-1 Shear model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3-2 Hysteresis loops for the Bouc-Wen model: for all cases the hardening
ratio is = 0.05, yield deformation dy = 0.2. (a) Reference case =
= 0.5 and variable m; (b) = 0.0 and variable (no hysteresis);
(c) = 0.0 and variable (no pinching); (d) variable A(strength). . 50
3-3 Hysteresis loops for the Bouc-Wen-Baber model: for all cases the
hardening ratio is = 0.05, initial yield deformation dy = 0.2. (a)
Stiffness and strength degradation due to A = 0.02; (b) Strength
degradation due to dy = 0.02; (c) Strength degradation due to =
0.02; (d) Unsymmetrical yielding due to = 0.4 . . . . . . . . . . . . 52
3-4 From left to right: base acceleration, displacement response, force-
deformation loops. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 563-5 Displacement response sensitivity with respect to material parame-
ters (initial stiffness k, hardening ratio , yield deformation dy) for
integration time step: (a) t= 0.02sec. . . . . . . . . . . . . . . . . 57
3-6 Displacement response sensitivity with respect to material parame-
ters (initial stiffness k, hardening ratio , yield deformation dy) for
integration time step: (a) t= 0.005sec. . . . . . . . . . . . . . . . . 57
3-7 Displacement response sensitivity with respect to various ground ac-celeration pulses. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3-8 (a) Complete system; (b) Basic system. . . . . . . . . . . . . . . . . . 59
3-9 Fiber discretization of a RC beam-column cross-section. . . . . . . . . 67
3-10 Hysteretic bilinear model parameters. . . . . . . . . . . . . . . . . . . 71
vi
-
8/12/2019 Franch in Thesis
11/147
3-11 Response of a SDOF oscillator to the first 10sec of El Centro 1941
acceleration record. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3-12 Sensitivity of the displacement response of the SDOF oscillator of
Figure(3-11) to material parameters E, Eh and fy. . . . . . . . . . . . 74
3-13 SDOF oscillator of Figure(3-11) subject to modulated white noise rep-
resented by a train of random pulses: sensitivity of the displacement
response to three of these pulses. . . . . . . . . . . . . . . . . . . . . 74
4-1 Shear model of a building. . . . . . . . . . . . . . . . . . . . . . . . . 78
4-2 Ground acceleration sample.
79
4-3 Hysteretic response under the input in Figure(4-2). . . . . . . . . . . . . 79
4-4 Reliability index versus time for a fixed value of PGA=0.2g and floor
ductility= 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4-5 Reliability index versus ductility for a fixed value of PGA=0.2g andtime t = 4sec. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4-6 Design point excitationfor a fixed value of PGA=0.2g, floor ductility= 3
and time t = 5sec.
81
4-7 Design point response at t = 5sec, PGA=0.2g, ductility capacity = 3:
thick line is 1st floor, thin lines the other floors. . . . . . . . . . . . . . . 81
4-8 Reliability index versus ductilityfor a fixed value of PGA=0.2gand time
t= 4sec: comparison between elastic and inelastic structural behavior for
deterministic(DT) and random(RT) threshold. . . . . . . . . . . . . . . 82
4-9 Reliability index versus timet for deterministic ductility capacity = 2. . 83
4-10 Reliability index versus ductility at time t = 4sec. . . . . . . . . . . . . 83
vii
-
8/12/2019 Franch in Thesis
12/147
4-11 Mean down-crossing rate versus time t for the inelastic structure and for
the 1st floor drift threshold 3dy.
84
4-12 Mean down-crossing rate versus time t for the tangent elastic structure
and for the 1st floor drift threshold 3dy. . . . . . . . . . . . . . . . . . . 84
4-13 Bridge layout: (a) general view; (b) deck cross-section; (c) pier cross
section. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
4-14 Bridge finite element model. . . . . . . . . . . . . . . . . . . . . . . . 87
4-15 Sample response of the bridge under base excitation. . . . . . . . . . 874-16 Sample response sensitivity of the bridge pier top displacements with
respect to some of the random acceleration pulses in the train of
Figure(4-15). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
4-17 Time-evolution of the reliability index . . . . . . . . . . . . . . . . . 89
4-18 Design point excitations for different threshold values at time t =
4sec, deterministic mechanical parameters. . . . . . . . . . . . . . . . 90
A-1 Random spaces. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
A-2 Basic system arrangements: (a) series and (b) parallel. (c) example
of general s y s tem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
A-3 FORM approximation (3 components): (a) series ; (b) parallel; (c)
general system, two cut-sets (g1,g2) and (g2,g3). . . . . . . . . . . . . 106
A-4 Filtered white noise PSD. . . . . . . . . . . . . . . . . . . . . . . . . 119
viii
-
8/12/2019 Franch in Thesis
13/147
List of Tables
3-1 Summary of displacement sensitivity computation for the Force and
Stiffness formulations. . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3-2 Derivatives of the stress increment with respect to n and . . . . . . 73
4-1 Floor yield force and drift. . . . . . . . . . . . . . . . . . . . . . . . . . 78
4-2 Upper bound to failure probability: comparison with Montecarlo simulation. 85
A-1 Examples of random processes/fields. (S) scalar, (V) vector, (D)
discrete, (C) continuous. . . . . . . . . . . . . . . . . . . . . . . . . . 108
ix
-
8/12/2019 Franch in Thesis
14/147
-
8/12/2019 Franch in Thesis
15/147
List of Symbols
The large number of quantities involved requires developing a rational notation to
be used consistently throughout. Since the study integrates tools coming from the
two different disciplines of reliability and mechanics, and some symbols are used
with different meaning in the two contexts, it has been chosen to keep the meaning
of the symbols as they are in one discipline and to change symbols from the other
when necessary. Specifically, the meaning of symbols as they are in mechanics is
kept unvaried and the notation used in reliability has been consequently adapted.
As usual, bold face indicates vector quantities and, among such quantities, vectors
are lower case and matrices capitals.
- ttime
- xi,x spatial coordinates
- i, natural coordinates
- U(t, x),U (t, x) displacement field
- u(t),u(t) nodal displacement
- u(t),u(t) nodal velocity u/t
- u(t),u(t) nodal acceleration 2u/t2
- q(t),q(t) modal displacement
- N(x) displacement interpolation function U(x, t) =N(x)u(t)
xi
-
8/12/2019 Franch in Thesis
16/147
- (t, x), (t, x) infinitesimal strain xU(x, t)
- a(x) =xN(x) strain-displacement function(x,t)=B(x)u(t)
- p(t), p(t) (external or applied) force
- pr(t), pr(t) internal or resisting force
- R(t), R(t),force residual or unbalanced forces
- (t),(t) stress
- h(t), h(t) internal history variables
- , random variable in the original space
- z,z correlated standard normal random variables
- y,y uncorrelated standard normal random variables
- v(t),v(t) (nodal) displacement sensitivity u/h
- v(t),v(t) (nodal) velocity sensitivity u/h
- v(t),v(t) (nodal) acceleration sensitivityu/h
- h(t)h
sensitivity history variables
- g() limit-state function in the original/physical space
-g() limit-state function gradient in the original/physical space
- G(y) limit-state function in the standard normal space
-G(y) limit-state function gradient in the standard normal space
- Jyjacobian of the transformation between original and standard normal space
xii
-
8/12/2019 Franch in Thesis
17/147
Abstract
In the relatively wide spectrum of reliability methods for seismic safety assessmenttwo distinct classes can be distinguished: that of engineering methods and that
of rigorous ones. Methods belonging to the former represent an approach to the
method formulation from the professional engineers side. In the trade-off between
the opposite requisites of practical usability and theoretical rigour, they do privilege
the first. The results they yield, though subject to certain limitations, are usable
in practice and arrived at with an acceptable computational effort. Methods of
the second class represent the complementary approach, looking for solutions that
reduce the onerosity of in general highly resource-consuming procedures withoutsacrificing the rigour coming from a sound reliability foundation. In most cases
these methods, when applied to real-scale structures, still imply a prohibitive cost
in terms of computational resources and knowledge to be acquired.
Persuaded that only a conceptually rigorous approach can provide a general
solution to the problem, in this thesis a recently proposed rigorous method is
extended towards practical applicability. Characterising trait of the method is that
of reducing a random vibration problem to the form that typically arises in the con-
text oftime-invariantstructural reliability. The mean crossing-rate of the dynamicresponse out of a safe domain is determined using FORM. A central role is played
by the limit-state function and its gradient. The computation of the latter accounts
for most of the resource consumption of the procedure. Optimization of the gradient
evaluation requires the development of specific dynamic response sensitivity analysis
tools for each mechanical model. In the context of the direct differentiation method
(DDM) beside the equations of motion one has to integrate an adjoint set of equa-
tions in the response sensitivity. Specific stress and resisting forces conditional
derivatives have to be developed to form the right-hand side of the adjoint system.
Previous applications of the method refer to SDOF dynamic systems or, for non-
seismic problems, to finite element models and specifically to plane-stress plasticity
problems. In the thesis the method applicability is extended to models of real
structures under seismic loading, and in particular to frame structures modelled
xiii
-
8/12/2019 Franch in Thesis
18/147
with fibre finite elements. The original contribution is the development of specific
response sensitivity tools for fibre elements. The result is implemented into an
existing code for three-dimensional inelastic dynamic analysis, for the stiffness and
the flexibility formulation as well, and for inelastic constitutive relations. This code
is then interfaced with another one that implements structural reliability methods,
and in particular FORM, to obtain estimates of the response distribution, mean
crossing-rate and first excursion probability.
Two applications demonstrate the method and its extension. The first refer to a
shear-type model of a building while the second to a three-dimensional fibre-model
of a bridge structure, both in reinforced concrete.
Notwithstanding the step forward towards the use of more realistic mechanical
models, the results achieved can not be considered yet as a satisfactory answer to
all the requisites of a method at the same time practical and rigorous. In particular,
the results have to be judged in the larger reference framework that includes classi-
cal simulation methods on one side and engineering methods on the other. The
formers are the only ones that, at least theoretically, can solve the problem taking
into due account all its factors, but they are not feasible of practical application to
real structures. With respect to these the method represents a decisive improvementin terms of resources required. With respect to the engineering methods unfortu-
nately, the comparison is still unequivocally in favour of the latters. On the other
hand it should be kept in mind that the method allows to consider sources of uncer-
tainty other than that coming from the earthquake, as for instance the randomness
in the mechanical parameters that influence the dynamic response of the structure,
which are not easily integrated in the engineering methods.
The most important still unsolved problem, in the author opinion, is that of
multiple collapse modes and, specifically, of the assessment of their mutual depen-
dence. With a notable exception of a recently proposed method, which is however
limited to linear elastic structures, no effective solution, i.e. other than Montecarlo
simulation, to the problem has been proposed. Future research will focus in this
direction.
xiv
-
8/12/2019 Franch in Thesis
19/147
Acknowledgements
My deepest and sincerest thanks go to my advisor, Prof. Paolo E. Pinto for theextraordinary attention he has dedicated to my work, for having always supported
as well as criticized me, for the example he has represented and the passion he
has transmitted to me. Equally for their scientific and moral rigor, and for their
great humanity, I wish to express my appreciation and thanks to Prof. Armen Der
Kiureghian and Prof. Filip C. Filippou, my mentors during my stay in Berkeley.
With these three persons, for the measure in which they contributed to my growth,
I will always be in debt.
Special thanks also to Prof. Fabrizio Vestroni, for having been always available
and understanding, to Prof. Giorgio Monti and Dr. Alessio Lupoi, for their friend-
ship and advices, and to Prof. Ove Ditlevsen, for having shown me how far I still
have to go.
My thanks and appreciation go to all those people that have made these three
years the richest and most intense of my whole life. They will be always in my
hearth.
xv
-
8/12/2019 Franch in Thesis
20/147
.
xvi
-
8/12/2019 Franch in Thesis
21/147
Chapter 1
INTRODUCTION
The uncertainty that characterises problems in earthquake engineering stems from
multiple concurrent sources and makes this discipline in this respect probably un-
rivalled among those of engineering. The intrinsic randomness in the occurrence
time and location of earthquakes, the vast uncertainty in predicting intensities and
characteristics of resulting ground motions, and the inability to accurately assess ca-
pacities of structures under cyclic loading, all compel us to make use of probabilistic
methods in order to consistently take into account the underlying uncertainties when
called to make quantitative assessments of structural safety.
This is the reason why, for both design and assessment, reliability-based ap-
proaches, as opposed to deterministic ones, are recognized as a superior mean for
measuring the performances of structures. This recognition, however, is not matched
by an equally wide diffusion in professional practice. For their potentialities to be
fully realised and hence their relevance in engineering practice to be enhanced, these
methods should meet a number of requirements that the present state-of-the-art still
does not allow to achieve, in the general case, in a way that is at the same timerigorous and practical.
1
-
8/12/2019 Franch in Thesis
22/147
2 1. INTRODUCTION
1.1 Requirements of a reliability method for seis-
mic risk assessment
The requirements that the ideal method should meet are implicitly defined through
the goal that the method should achieve, that of providing a realistic measure of the
total risk. Realism starts with the description of the seismic input, it involves then
the structural models and finally implies a degree of complexity and an amount of
computations which are acceptable to advanced engineering practice.
It is obvious that the confidence on the results of a seismic risk analysis largely
depends on a proper choice of the seismic action. It is equally clear that this choice
as well as that of the probabilistic model have to vary from case to case. Design
and assessment will have different requirements in this respect. Earthquake ground
motion can be described in one of the following ways, each suited for different
purposes: random processes, simulated accelerograms, recorded accelerograms and
synthetic accelerograms.
Random process modelling in conjunction with classical random vibration theoryhas been of invaluable help in the early stages of earthquake engineering in helping
understanding essential features of structural response in the elastic range. The
classicalmodels seem nonetheless unsuited for the purpose of realistic seismic risk
assessment of specific structures at specific sites, due to the averaged nature of
random processes models and the inability of random vibration theory in dealing
with the strong non-linearities exhibited by structural response in the vicinity of
collapse.
Simulated accelerograms are defined either as samples of a given random process,
i.e. compatible with a given power spectrum, or as ground motions that match an
assigned response spectrum. They can be used in non-linear dynamic analysis in
conjunction with realistic mechanical models and in this respect they remove the
limitation of random vibration theory. On the other hand, they still present the
drawback of being compatible with power or response spectra that come from the
-
8/12/2019 Franch in Thesis
23/147
1. INTRODUCTION 3
averaging of different spectra over wide areas, and are therefore unsuited for being
used for a specific site. They have their use in checking the internal consistency
of seismic design codes, i.e. whether structures designed with a ductility-reduced
elastic response spectrum and simplified analysis tools do actually satisfy, under the
test of a non-linear dynamic analysis , the performance objectives of the code.
State-of-the-practice of seismic risk assessment of important structures involves,
since a number of years now, the use of recorded accelerograms. In the last decade,
due to a number of large events that have struck developed regions of the world,
the number of collected records has increased enormously. It goes without saying
that, the main limitation of availability removed, recorded accelerograms representthe higher degree of realism achievable in terms of the action and, as for simulated
accelerograms, they can be used in conjunction with realistic mechanical models.
The subject of how to select and scale records for use at a specific site is widely
discussed in the literature [12][13].
Syntethic accelerograms, obtained from seismological modelling of the rupture
event at the source and of the stress waves propagation in the crust, are the new
frontier of earthquake models to be used in seismic risk [50]. Though much progress
has been achieved on these models, the number of applications in engineering arestill very few. There are nonetheless regions for which seismologists do consider
the seismotectonic features known in sufficient detail as to allow physically-based
accelerograms to be confidently generated and used.
Once a proper model of the action is chosen, the realism requirement involves a
corresponding choice for the model of the structure. One of the reasons why relia-
bility methods are being slow in gaining wider diffusion is in the contrast between
the mathematical complexity of the procedures, and the drastic simplifications thatquite often one has to introduce in the modelling of the structure. It is easily under-
stood how it can be difficult for an engineer confronted with a physically complex
problem to accept the idea that a probabilistic approach applied to a gross ideali-
sation of the problem can provide better information than a reasoned examination
of the results from a deterministic but accurate mechanical model.
-
8/12/2019 Franch in Thesis
24/147
4 1. INTRODUCTION
The ideal seismic risk analysis method should work jointly with advanced struc-
tural analysis methods, and with models of realistic dimensions. For the seismic
case the performance levels of interest for safety are those which are close to the
actual collapse of the structure. The structural model should be capable of cap-
turing all potential modes of failure, either displacement-controlled (ductile) ones
such as weak storeys failures and exhaustion of columns ductility, or force-controlled
(brittle) ones such as shear strength failures and joints failures.
Finally, on the reliability part, the method should be sophisticated enough as
to consistently treat the different sources of uncertainty (inherent randomness that
arises from natural variabilities in material as well as in load parameters, epistemic
uncertainty coming from incomplete statistical information, and model uncertainty
coming from the use of imperfect mathematical models to describe complex physical
phenomena), and to consider the possible dependence between all the failure modes.
The reader that wishes to have a comprehensive view of available reliability
methods in civil and in particular earthquake engineering can refer to three review
papers, [52][24][57], appeared in the last decade on the topic, the first two addressing
specifically seismic problems. In the following only a few methods, relevant to the
discussion and to this thesis, are considered.
1.2 Engineering methods
The ultimate purpose of a seismic risk analysis is to arrive at the (usually annual)probabilityPfof exceeding a given limit-state, or a set of limit-states, accompanied,
when feasible, by fractile values corresponding to selected confidence intervals on
the estimated value ofPf. This probability is called the risk.
In many past, as well current, applications, it has been customary to arrive at
the risk by first conditioning it on one parameter expressing the intensity of the
-
8/12/2019 Franch in Thesis
25/147
1. INTRODUCTION 5
seismic action. The final result is obtained then as
Pf= 0
Pf(I=i)dH(I=i) (1.2-1)
in which I is the selected intensity parameter, Pf(I = i) is the failure probability
as a function of I, also called fragility function, and H(i) = Pr{I i, 1year} isthe so-called hazard function characterising the seismic activity at the site under
consideration in terms of intensity. The distinction between fragility and hazard
dates back to the early phases of seismic reliability and was intended as a mean to
separate the tasks of the structural engineer and of the seismologist. It is important
to recognize, however, that the fragility function does not depend on the structuralproperties only but on all the characteristics of the seismic input except for the the
single scaling factor of the intensity. In a different environment, therefore, the same
structure would have a different fragility.
Most of the methods available are actually intended at evaluating the fragility
or, even more simply, the failure probability conditioned on one specific sample
accelerogram. Since the action variability is dominant in seismic problems this
result is clearly insufficient and has to be regarded as a step in a wider procedure in
which this latter variability has to be introduced subsequently.
Finally, a closer examination of the seismic risk assessment problem, as expressed
by Eq.1.2-1, allows a more clear appreciation to be gained on the importance of an
accurate estimation of the fragility term in the integral. In the most simple terms
Eq.1.2-1 is another version of the classical reliability problem formulation
Pf=
0
FR()fS()d (1.2-2)
where now the resistance distribution FR() = Pr{R } represents Pf() andfs() is the density of the loading and it is verifiable that when the variability of
one of the two terms (the load in this case) dominates, neither the variability of the
other term nor the precise form of its distribution have a significant influence onPf.
This consideration has originated in the last decade much research to investigate
under what conditions and with how much accuracy (or loss of it) the fragility could
-
8/12/2019 Franch in Thesis
26/147
6 1. INTRODUCTION
be evaluated using a drastically reduced number of samples, of the order of a few
tens. The main outcome of this research are two methods, [22] and [35][23], that
represent what could be called the advanced state-of-the-practice in seismic reliabil-
ity assessment. Their final result is different since one yields the total risk [22], while
the other gives the fragility function, but they have the common characteristic of
employing only basic probability theory notions and of working in conjunction with
state-of-the-art mechanical models for inelastic dynamic analysis of real-scale struc-
tures. These two traits, together with the extremely sparing number of structural
analyses required, make them very attractive for use in professional practice. In
particular the first one has been also cast in a partial safety factors format suitable
for use in design.
When compared with that of classical simulation methods, Montecarlo and its
variations, the computational demand of these methods is dramatically lower. The
main drawbacks are the inability to take into account the randomness of the struc-
ture and the dependence among different failure mechanisms that concur in causing
the structural collapse. Removal of these limitations is made difficult, if possible at
all, by the very nature of the methods and their underlying simplified probabilistic
setting. They have to be considered as a successful attempt to approach the idealmethod from the engineering side of the problem, meeting the requirement of accept-
able complexity and computational demand, and that of using realistic structural
models.
1.3 State-of-the-art methods
Some of the methods described in this section have the common feature of employing
a discretised form of the input to reduce a time-variant problem to a time-invariant
one, formulated in a space of random variables , and that can be solved by the well-
established methods of structural reliability [42][29][25][4][5]. Others use recorded
accelerograms and aim at finding Pf conditional on the record, [67], or treat the
record inside a response surface approach [62].
-
8/12/2019 Franch in Thesis
27/147
1. INTRODUCTION 7
Methods based on the FORM/SORM techniques have been proposed in the last
ten years by Der Kiureghian and others. One of these proposals presented in [67]
applies to a generally non-linear structure with random parameters, subjected to
a deterministic load history possibly modulated by some random parameter, for
example the intensity. Solution is sought to the problem commonly known as first-
excursion, i.e. the probability that a selected scalar response quantity exceeds a
given threshold in time interval D. To this purpose, a time independent limit-state
function is defined as the minimum value, over D, of the safety margin function
z(t, ) =r(t, ) s(t, )
where r ad s represent resistance and response, respectively, and they are both in
principle functions of time t and of the vector that in this case collects random
variables describing randomness of the structure. Discretisation in time is achieved
by considering the function z(t, ) at N time instants in D, so that the limit-state
function g() becomes g() = min{zn()}, where n indicates the generic instantwithin theNconsidered. Given a realization of the function z(t, ) can be calcu-
lated via structural analysis at all instants, and the minimum found at time instant
n = n, so that g() = zn(). In the search for the design point ofg one then
moves on the surface zn() = 0, but during the search it may well happen that
for an improved point i the instant of time when zn() is minimum changes and
hence the g-function changes in consequence. To account for this specific feature of
the problem a modified version of the usual search algorithm employed in FORM
analysis has been developed, suitably modified so as to be able to identify jumps
from one surface to another one and continue moving on the latter and possibly
on other ones until the design point is found. It is observed however that in this
problem more than one design point is significant since a number of almost equally
likely excursions at other time instants (as it is usually the case with earthquake
induced oscillations) may contribute to Pf. Failure probability is determined then
as a series system between the determined excursions but there is no guarantee that
all the significant design points have been found, thus the method yields only a lower
bound to Pf. This, together with the fact that the analysis has to be repeated for
many records, is the reason why research in this direction does not seem to have
-
8/12/2019 Franch in Thesis
28/147
8 1. INTRODUCTION
progressed further even if the method has been applied to realistic structures.
A second proposal by Der Kiureghian and others [42][29][28][25][40], as well asother two methods based on simulation proposed by Beck and others [4][5], em-
ploy fully non-stationary random process models (in particular realisations of these
processes in conjunction with non-linear dynamic analysis) and are based on the dis-
cretisation of the input process in terms of a train of random pulses. These pulses
are collected in the vector of the random variables together with the other vari-
ables that represent randomness in the structure (with the exception of the method
presented in [4]). The difference in the methods lies in the reliability method chosen
after the process discretisation to solve the resulting time-invariant problem.
Recognizing that simulation is the only reliability method that offers a rigor-
ous solution of the very complex first excursion problem, but also that classical
Montecarlo simulation requires a prohibitive number of analyses for estimating low
probabilities, even if in earthquake engineering problems these are much higher than
for non accidental types of action, Beck and others have proposed two enhanced sim-
ulation techniques. They both yield as final result a fragility curve. The fist one,
presented in [5], is based on the concept of subset simulation. The idea is that the
determination of the very low failure probability associated with an extreme eventcan be split into the computation of the failure probabilities of a sequence of failure
events characterized by much higher probabilities. IfFrepresents the failure region1of the event under consideration, letF1 F2 . . . Fm =Fbe a decreasing se-quence of failure events so thatFk =
ki=1 Fi, k = 1, . . . , m. For example, if failure
is defined as the exceedence of an uncertain demand D over a given capacityC, that
is Pr{D > C}, then a sequence of decreasing failure events can simply be defined asFi = {D > Ci}, where C1 < C2 < . . . < C. By definition of conditional probabilitythen one has
Pf=P(F) =Pm
i=1Fi
= PFm|m1
i=1Fi
Pm1
i=1Fi
=
=P(F1)m1
i=1P(Fi+1|Fi)
1The subspace of the random variable space that contains all the realizations of that corre-spond to non-satisfaction of the performance criteria.
-
8/12/2019 Franch in Thesis
29/147
1. INTRODUCTION 9
The idea is to estimatePfby estimating the conditionalPf,i. The advantage is that,
though Pf is small, by choosing the intermediate failure events appropriately, the
conditional probabilities can be made sufficiently large so that they can be evaluated
efficiently by simulation. For example, suppose that P(F1), P(Fi+1|Fi) 0.1, i =1, . . . , 5, thenPf 106 which is too small for efficient Montecarlo simulation. Theproblem of simulating samples according to the conditional distributions is solved by
the Metropolis method (Markov chain simulation). This method employs state-of-
the-art mechanical models, can take into account mechanical randomness and also
greatly reduces the number of simulations required. Nonetheless, even if well below
the millions of simulations required by plain Montecarlo to estimate probabilities of
the order of 106, the number of simulations is still in the order of a few thousands,
too far from the numbers that could be considered in engineering practice, especially
with real-scale structures.
The other simulation method, presented in [4], is a very efficient form of impor-
tance sampling. This method is discussed later on for its relevance to the subject
of the thesis. Here it is observed only that its advantages are the capability of con-
sidering as many failure mechanisms as needed and to properly take into account
their dependence, and the very low number of simulations required, in the orderof a few tens, as in the case of the state-of-the-practice methods mentioned in the
previous section. The usefulness of the method, however, is severely limited by the
hypothesis of linear structural behaviour, on which its superior efficiency is based,
and by the fact that it can not account for randomness in the structure.
The method presented in [42][29][28][25][40] uses again FORM/SORM to com-
pute failure probabilities. Here the usual algorithms for the search of the design
point employed for static problems can be used since there is no bouncing between
surfaces corresponding to excursion at different time instants, as it was the case forthe method in [67]. The method offers an upper bound to the first excursion prob-
ability using the crossing-rate theory. The final result of the method is a fragility
curve. Realistic structural models can be used while retaining computational effi-
ciency, provided the mechanical models are properly enhanced with capabilities
necessary to compute the gradients of the limit-state function. In particular, the
-
8/12/2019 Franch in Thesis
30/147
-
8/12/2019 Franch in Thesis
31/147
Chapter 2
FORM SOLUTION OF
RANDOM VIBRATIONPROBLEMS
2.1 Introduction
In this chapter a rather original, and recent, perspective on random vibration prob-
lems is presented. Problems formulated in terms of random processes in time are
transformed into discrete ones in terms of time-independent random variables. In
the vector space of these random variables geometric interpretations become possible
for events of interest defined in terms of the input/output processes. In particular,
random vibration of linear systems give rise to simple, linear, geometric shapes, such
as hyper-planes and wedges formed by their intersection.
The reformulation is based on a discretisation of the input process, a discrete
form for the output ones following immediately. Specifically, the ground motionrandom process, the input, is represented as a train of random pulses. This discrete
representation is introduced in Section 2.2 in the wider framework of random process
models of the seismic action.
The originality of the approach does not consist of seeking a discrete solution
to a continuous problem but in the fact that the considered discretisation reduces
11
-
8/12/2019 Franch in Thesis
32/147
12 2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS
the problem to a well-known form that arises in the context of structural reliability.
All the well-established methods of structural reliability can then be used to find
a solution, either exact1 for linear problems or approximate for non-linear ones. In
particular the methods based on the expansion of the limit-state surface around
the design point (FORM/SORM) are of interest in the present work, with specific
interest into non-linear problems.
Finding the design point becomes then a central part of the random vibration
problem. Algorithms that perform this search more effectively require the compu-
tation of the limit-state function gradient. When random vibrations of a complex
structure are of interest, the latter is commonly described by a finite element model.Computation of the gradient in this case, i.e. when the limit-state function is formu-
lated in terms of a numerically determined response, becomes a challenging problem
and accounts for most of the computational effort. This is the reason why the
problem is dealt with extensively in Chapter 3, which is entirely devoted to it.
2.2 Models of the seismic action
Regarding nonlinear dynamic analysis as the only acceptable mean to assess the
reliability of a reinforced concrete structure under seismic excitation, the latter must
be necessarily provided in the form of acceleration time-histories. These may belong
to one of the three broad categories below
- samples of a random process
- recorded (or natural) accelerograms
- accelerograms from seismological models (or synthetic)
The interest here, in view of the fact that the problem at hand is one of random
vibrations, is for those acceleration time-histories that belong to the first category.
The latter two classes constitute two very large worlds that will not be entered here
and are included only for completeness.
1Consistently with the discretisation.
-
8/12/2019 Franch in Thesis
33/147
2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS 13
2.2.1 Random process modelling
A basic need of the earthquake engineering community has always been that of defin-
ing realistic models of the seismic action for design purposes. Without seismological
models yet available to help for this task, engineers started to look at the records
that were rapidly accumulating, in search of characteristics of the ground motion
possessing a stable statistical nature (given of course some global earthquake data
such as the magnitudeM, distancedand recording site soil type S). The observed
statistical stability of the frequency content of the motions under similar conditions
ofM,d and Sis at the base of the idea of considering the accelerograms as samples
of random processes. Several stochastic models of varying degrees of sophistication
have been proposed.
The empirical approach based on the inspection of the available recorded ground
motion data base, has focused principally on the frequency content of the ground
motion, with due attention also paid to the modulation in time of such motion
and, to a much lesser extent, to the evolution with time of the frequency content.
This latter dependence of the frequency content on time, observed in real ground
acceleration records, originates from the complexity of the radiation of the seismic
waves from the source to the site, i.e. from the fact that P (primary/body), S
(secondary/shear) and Rayleigh-Love (surface) waves have different frequency con-
tent and arrival times at a given site since they propagate with different velocities
in the earth crust. Calibration of models that take into account this frequency-
content time-dependence versus statistical data has proven difficult and prone to
much uncertainty, so that statistically-based fully non-stationary stochastic earth-
quake ground motion models are not available. The earliest and still more widely
used models are stationary or, at most, amplitude-modulated random processes.
2.2.1.1 Stationary models: the Kanai-Tajimi and Clough-Penzien mod-els
The basic and, under the simplest of the assumptions, also sufficient description of
a random process is S(), its power spectral density function (PSD). A zero-mean
-
8/12/2019 Franch in Thesis
34/147
14 2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS
stationary Gaussian process is in fact completely defined once its PSD is specified.
Among idealized ground motion models based on empirical data the most-widely
used PSD form is that proposed by Kanai [38] and Tajimi [61] to take into account
the observed dependence of the power spectrum on local site soil properties and the
corresponding dominant frequency.
The proposed PSD coincides with that of the acceleration response process of a
SDOF oscillator with parameters g and g subjected to a white noise process of
intensityS0. This PSD is given by the productS0|H()|2 whereH() is the complexfrequency transfer function of the linear oscillator whose motion is governed by
ua+ 2ggur+2gur = 0
in whichuaand urare the oscillator absolute and relative displacement, respectively.
In the equation above one can either replaceuawithur+ug or urwithuaug gettingone of the two following equations
ua+ 2ggua+2gua = 2ggug+
2gug (2.2-1)
ur+ 2ggur+2gur = ug (2.2-2)
They lead obviously to the same frequency transfer function between the Fourier
transforms of ugand ua, once it is recalled that for the second the ground acceleration
has to be added
H() =2g + i2gg
2g 2 +i2gg (2.2-3)
Making use of this transfer function one gets for the Kanai-Tajimi density
SKT() =4g + 4
2g
2g
2
2
g 22
+ 42
g2
g2
S0 (2.2-4)
which with a suitable choice of the parameters g and g can be shown to match
with adequate accuracy empirical PSDs elaborated for different soil conditions. The
model has also a qualitative physical support, since it can be viewed as the PSD of
the acceleration process at the upper surface of a soil stratum, modelled as a linear
filter, having a broad-band excitation process at the bedrock.
-
8/12/2019 Franch in Thesis
35/147
2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS 15
0 5 10 15 20 25 300
1
2
3
4
5
6
7
8
9
[rad/sec]
S()
stiffmediumsoft
Figure 2-1: Clough-Penzien power spectra for different soil conditions.
The use of the Kanai-Tajimi model, however, is limited to those cases when accel-
eration responses are of interest and the problem is not sensitive to the low-frequency
range of the excitation, since the corresponding ground displacement process PSD,given by Sd() = SKT() /
4, has infinite total power, with largest contributions
coming from the very low frequencies. To solve this problem Clough and Penzien [17]
have suggested the introduction of a second filter in series with the first one, with
parameters fandfappropriately chosen in order to filter out the low frequencies.
The corresponding PSD is
SCP() = |Hf()|2 SKT() = 4
2f 22 + 42f2f2
SKT() (2.2-5)
Frequently adopted values for the filters properties are: firm or stiff soil conditions
g = 5 rad/sec, g = 0.6, medium soil conditions g = 3 rad/sec, g = 0.4, soft
soil conditionsg = rad/sec,g = 0.2 and, for all soils, f= 1.6rad/sec,f= 0.6,
the resulting power spectra being shown in Figure 2-1 for a unit input white noise
intensity.
-
8/12/2019 Franch in Thesis
36/147
16 2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS
2.2.1.2 Non-stationary models: periodic processes
Periodic process are introduced as a possible mean to simulate those sample real-
izations of a random process that are needed in order to perform nonlinear dynamic
analyses. With reference to these processes the issue of inclusion of non-stationarity
in the ground motion model is also addressed.
Consider the process X(t) periodic of period T, defined as a linear combination
of harmonic functions with random coefficients in the form
X(t) =N
k=1
(Akcos kt+Bksin kt) (2.2-6)
where Ak,Bk are zero-mean, uncorrelated Gaussian variables with common variance
2k and k = k1 = k2/T. This process is Gaussian zero-mean and can be easily
shown to be stationary through its autocorrelation function RXX. Computing the
latter and taking its Fourier transform yields an expression for the process PSD as a
function of the variablesAk and Bk which can then be related to a known PSD, for
example to the Kanai-Tajimi or the Clough-Penzien one. The latter result allows
easy generation of samples according to a process with given PSD.
The autocorrelation function of the process X(t) is
RXX(t1, t2) = E [X(t1) X(t2)] =
= E
Nk=1
(Akcos kt1+Bksin kt1)Nh=1
(Ahcos ht2+Bhsin ht2)
=
=Nk=1
E
A2k
cos kt1cos kt2+ E
B2k
sin kt1sin kt2
=
=
Nk=1
2kcos k(t2 t1) =
Nk=1
2kcos k=RXX() (2.2-7)
which, as anticipated, shows that the process is stationary. The PSD of the process
is then given by
SXX() = 1
2
RXX() eid=
Nk=1
2k2
[(k ) +(k+)]
-
8/12/2019 Franch in Thesis
37/147
2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS 17
Due to the symmetry of the PSD it is easier to work with the so-called one-sided
PSD GXX() given by
GXX() =Nk=1
2k(k )
defined only on the positive portion of the frequency axis. The above relation shows
that the one-sided PSD is a discrete function made up of spikes of intensity 2k at the
frequencies k. Simulation of sample realizations reduces to the generations of 2N
zero-mean Gaussian random variables with variance given by 2k = GXX(k),
where GXX(k) is the one-sided form of the continuous target PSD, for example
that in Eq.(2-1), which is in this way approximated by its discrete counterpart.
0 10 20 300
2
4
6
[rad/sec]
G()
10 0 1020
0
20
40
60
[sec]
R()
Figure 2-2: Left: Discrete Clough-Penzien one-sided power spectrum for mediumsoil conditions; Right: Autocorrelation function corresponding to the discrete PSDbeside.
A number of variants of the processX(t) in Eq.(2.2-6) can be obtained by simpletransformations. These turn out to be more convenient for simulation purposes and
can be shown to have the same second-moment characterization. One of these
variants is
X(t) =Nk=1
Ckcos (kt+k) (2.2-8)
-
8/12/2019 Franch in Thesis
38/147
18 2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS
This form is easily shown to be equivalent to that in Eq.(2.2-6) by
Nk=1
Ckcos (kt+k) =Nk=1
[Cksin kcos kt+Ckcos ksin kt]
which implies that Ck =
A2k+B2k and k = arctan (Ak/Bk). IfAk, Bk are uncor-
related Gaussian, Ck and k are Rayleigh and Uniform, respectively. The autocor-
relation function of this process can be shown to coincide with that in Eq.(2.2-7).
Another process whose autocorrelation function is identical to the previous one is
defined as
X(t) =N
k=1
2kcos (kt+k) (2.2-9)
This last form has the great advantage of requiring only N random variables to
generate a sample of the process and this is the reason why it is the more widely
used for this purpose2.
One has to note that, even if the three processes in Eq.(2.2-6), (2.2-8) and (2.2-
9) have the same second-moment characterization, they are not probabilistically
equivalent since they have different distributions. While the process in Eq.(2.2-6)
is always Gaussian, the other two are only asymptotically Gaussian if N is large
(simulations show that N >100 makes the assumption of Gaussianity acceptable).
A straightforward way to introduce non-stationarity in the periodic processes
above is to modulate them with a deterministic envelope function as in
XNS(t) =e (t, ) X(t)
where the modulating function e (t, ) depends on both time and frequency as it
is the general case for fully non-stationary processes. Most often the information
available is not sufficient to establish a reliable dependence on the frequency and
e (t, ) is replaced by e (t). When the latter is a slowly varying function of time,the process above represents an amplitude-modulated harmonic function whose evo-
lutionary PSD can be shown to be (uniformly modulated process, [53], see Figure
2-3)
SNS(, t) = |e (t)|2 S()2Of course the degree of randomness is halved.
-
8/12/2019 Franch in Thesis
39/147
2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS 19
010
200 10 20 30
0
5
10
15
t [sec][rad/sec]
G(,t
)
Figure 2-3: Discrete Evolutionary one-sided power spectrum for medium soil condi-tions (Clough-Penzien stationary spectrum modulated by an exponential envelope).
Correspondingly, the process variance becomes
2X(t) =
SXX(, t) d=
0
GXX(, t) d =
0
e2 (t) GXX() d=20e
2 (t)
2.2.1.3 Non-stationary models: Pulse-type processes
Similarly to what has been done with periodic processes, a number of non-stationary
process models that retain the main idea of the Kanai-Tajimi one3 are now presented.
These are based on the mathematical concept ofrandom pulse train.
The physical basis underlying these models is in the mechanism of earthquake
generation: slips in a fault zone in the crust. When a slip is taking place and the
fault zone is being extended, the behaviour of the material in the vicinity of the
fault is obviously inelastic. However, away from the immediate vicinity, the energy
released and the associated particle motion is transmitted in the ground essentially
through linear stress waves. The typical presence of high-frequency components in
3The idea that the motion at the ground surface can be thought of as some broad band bedrockexcitation linearlyfiltered by the soil stratum above.
-
8/12/2019 Franch in Thesis
40/147
20 2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS
earthquake records also suggests that slips in a fault zone occur intermittently rather
than smoothly. A possible model is to assume that slips occur in independent short
spurts, almost impulsively [43]. This can be mathematically described quite simply
as
Xfault(t) =
N(t)k=1
Yk(t k) (x k) (2.2-10)
where (t k) and(x k) are Diracs delta in time and space which differ fromzero only at time k and location k (in the fault zone) of the occurrence of the
k-th pulse with random magnitude Yk. The magnitudes of the pulses are assumedto be independent but identically distributed. The number of pulses up to time t is
counted by the random process N(t). The process in Eq.(2.2-10), when the pulses
occurrence times are uncorrelated, is calledshot-noise. In what follows the stronger
assumption that the pulses occur independently, i.e. that N(t) is a Poisson process,
will be made.
A shot noise is non-stationary when either the average pulse occurrence rate
depends on time, or, when is constant, if the distribution of the Ys are time-
dependent. If neither of the two conditions above is verified, the process is stationary
and becomes a white noise process (as the bedrock broad-band excitation of the
Kanai-Tajimi model).
The ground surface motion related to the process above is obtained from the
Greens functiong (t k, x k) that gives the motion at time t and locationx (atthe ground surface) due to a unit-impulse at time k and location k (in the fault
zone)
X(t, x) =
N(t)k=1
Ykg (t k, x k) (2.2-11)
If the inverse Fourier transform of the frequency transfer function of the Kanai-
Tajimi model (see Eq.(2.2-3)) is used as Greens function in Eq.(2.2-11) (dropping
the dependence on the locations since only one input and one output locations,
-
8/12/2019 Franch in Thesis
41/147
2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS 21
bedrock and surface, are of interest) one gets
X(t) =
N(t)k=1
Ykha(t k) (2.2-12)
where the acceleration unit-impulse response function has the form
ha(t k) = 2gghd(t k) +2ghd(t k) =
=gegg(tk)
1 22g
1 2gsin gd(t k) + 2gcos gd(t k)
in which hd is the well-known displacement unit-impulse response function.
If the condition for the process to be stationary are satisfied the PSD of the
process in Eq.(2.2-12) approaches that of the Kanai-Tajimi model.
In particular in what follows a simplification of the described process is of interest,
i.e., a process for which the pulse arrival times are equally spaced
X(t) =Nk=1
Ykha(t k), k = (k 1) t (2.2-13)
and the pulsesYkare defined as integrals of a zero-mean Gaussian white noise process
W(t)
Yk =
k+1k
W(t) dt
It is immediately seen that the pulses are zero-mean uncorrelated Gaussian variables
with common variance given by
2Yk = E
k+1k
W(t1) dt1
k+1k
W(t2) dt2
=
k+1k
k+1k
E [W(t1) W(t2)] dt2dt1=
= k+1
k k+1
k
RWW(t2
t1) dt2dt1=
k+1
k k+1
k
2S0(t2
t1) dt2dt1 =
=
k+1k
2S0dt= 2S0t
Non stationarity can be reintroduced in this simplified model4 as it has been
done for periodic processes by means of an amplitude-modulating envelope function
4It is recalled that the starting model in Eq.(2.2-11) is fully non-stationary.
-
8/12/2019 Franch in Thesis
42/147
22 2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS
e(t). Making use of multiple envelopes and filters one can also model spectral non
stationarity with the process
X(t) =
Nfi=1
ei(t)
Nk=1
Ykha,i(t k)
(2.2-14)
It is finally observed that simulation of random process realizations according to
these pulse-train models reduces, as it was the case for periodic processes, to the
generation of a random vector of length N. While in both periodic and pulse-train
modelsNdetermines the richness of the process in terms of frequency content, N is
not the same for the two cases since for the pulse-train one it is also strictly relatedto the process sample duration.
The model in Eq.(2.2-14) represents the starting point for the reformulation of
the random vibration problem anticipated at the beginning of this chapter.
2.3 Pulse-type discretization as a key to problemreformulation
As anticipated at the beginning of this chapter, a new perspective on random vibra-
tions problems is gained once a discrete representation of the input random process
is available. In particular when this discrete representation is in terms of a vector of
standard normal random variables, many statistical quantities of interest in classical
random vibrations, such as the distribution of the process and its envelope, correla-
tion functions and statistics of crossing rates, can be given geometric interpretations
in the standard normal space.
When the structure is linear and the excitation or input process is Gaussian
the statistical quantities above have simple geometric forms as counterparts, and
the results found are consistent with the classical solutions. When the response
processes are non Gaussian either due to non linear structural behaviour or non-
Gaussian excitation, the geometric forms are not as simple and exact solutions are
not available. In this case, however, the well established tools of time-invariant
-
8/12/2019 Franch in Thesis
43/147
2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS 23
reliability can be used to achieve approximate solutions.
Possible approaches to the solution of random vibration problems are based onFORM/SORM techniques and on importance sampling. Before a closer analysis of
these is undertaken, geometric interpretations are given for a number of well-known
quantities of interest.
2.3.1 The elementary excursion event for linear and non-linear systems
Consider the ground acceleration random process as discretized in Eq.(2.2-13). Thisis only one of the possible alternatives for the discrete representation of a Gaussian
process. In general all such existing discrete representations can be expressed in the
form
X(t) =X(t) +Ni=1
si(t) yi= X(t) + sT (t) y (2.3-1)
where X(t) is the time-varying deterministic mean function of the process, thedeterministic functionssi(t) give the time-evolution of the process and the standard
normal random variablesyiits randomness. With reference to the process in Eq.(2.2-
13) one sees that the mean function is identically zero and si(t) =
2S0t ha(t ti) with ha(t) the acceleration unit-impulse response function of the linear filter
and
2S0t the standard deviation of the random pulses whose standardized
intensities are given by the random variables yi.
It is noted thatN is a measure of the resolution of the representation and that its
value, as well as the vector of deterministic basis functions s(t), depends on the cor-
relation structure of the process. Alternative representations differ in the choice of
the basis functions, for example for the Karhunen-Loeve expansionsi(t) =
ii(t),
where i, i(t) are thei-th eigenvalue and eigenfunction of the autocovariance func-
tion of the process[60], for an expansion in terms of trigonometric functionsone has
s(t) =T(t)L, where(t) is a vector of simple trigonometric functions while L is a
-
8/12/2019 Franch in Thesis
44/147
-
8/12/2019 Franch in Thesis
45/147
2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS 25
t, for the system starting at rest, is given by the Duhamels convolution integral
u (t) = t
0
X() h (t ) d= t
0
Ni=1
yisi()h (t ) d= Ni=1
yiai(t) =aT (t) y
(2.3-2)
where, having exchanged the order of summation and integration, the response
processi-th basis function has the form
ai(t) =
t0
si() h (t ) d
The interpretations given for the variance and the autocorrelation function of the
input process hold for the response process too. Other simple interpretations could
be easily given, for example for the input-output cross-covariance function.
Consider now the event of the process u(t) exceeding a predefined threshold bk
at time t = tk, written as{u (tk) bk}. From Eq.(2.3-2) it immediately followsthat all the possible input processes corresponding to this event are given by those
realizations ofy that satisfy the condition
bk
aT (tk) y
0 (2.3-3)
which is an half-space bounded by the hyperplane bk aT (tk) y = 0 of normalk =a (tk)/a (tk) and distance from the origink =bk/a (tk) =bk/u(tk). Thecondition in Eq.(2.3-3) represents the failure domain of the linear limit-state function
G(y) =bkaT (tk) yin the standard normal space and the exact probability contentassociated with this failure domain is well known to bePf= (k). This confirmsthe result already available from classical random vibrations, that the probability of
the zero-mean Gaussian process u(t) having variance 2u(t) of exceeding bk at time
tk is 1 ( bk0u(tk)).
The latter result is quite important. The event {u (tk) bk} is completely definedby the design point of the limit-state surface G(y) = 0. It is shown in the next
section how this design point is analytically known for linear systems under Gaussian
excitation. The geometry of this exceedance event at various time instants for the
respective, generally time-varying, thresholds is shown in Figure(2-5(a)).
-
8/12/2019 Franch in Thesis
46/147
26 2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS
Figure 2-5: Process excursions as half-spaces: (a) exact for linear systems; (b)approximate for non linear systems.
When theresponse is non Gaussian, for example due to a non Gaussian input or
to a non linearity of the system, the response representation in the form of Eq.(2.3-2)
has to be replaced by a more general non linear one such as
u (t) =u (y, t)
which has a geometric representation in the standard normal space other than an
hyperplane. In this case FORM or SORM techniques can be used to obtain an
approximate value of the probability associated with the event{u (tk) bk}, asshown in Figure(2-5(b)), but numerical solution of the constrained optimization
problem with constraint Gk(y) =bk u (y, tk) = 0 must be resorted to in order tofind the design point.
The usefulness of this detailed discussion on this excursion event, in the following
referred to aselementary, emphasizing the fact that it is an excursion at a fixed time
instant, as opposed to the more complex first5 excursionevent, will become clear in
sections 2.3.3 and 2.3.4.
5over a time interval of duration D
-
8/12/2019 Franch in Thesis
47/147
2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS 27
Of great interest is the so-called design-point excitationobtained as
X (t) =sT (t) y (2.3-4)
This input is, among all inputs that cause a response u(tk) greater than or equal
to the threshold bk, the most likely one. As it will be made clear in the following
paragraph, X(t) is a nearly harmonic, gradually intensifying function of time with
a frequency close to the fundamental frequency of the system. The nature of this
somewhat unnatural excitation has been extensively investigated, see for example
[31] and [40]. In the next section the design point excitation is discussed with
reference to linear systems.
2.3.2 Design-point excitation
As it has been anticipated, the design point for the elementary event of excursion at
time tk of the response of a linear structure to a Gaussian excitation can be found
in closed form. Assuming for the time being and without loss of generality that the
Gaussian excitation is a stationary white noise random process W(t) of intensityS0,
its discretization in terms of random pulses is carried out as usual according to
Ys=
ts+tts
W(t) dt= ys
2S0t
Direct constraint minimization to find the minimum distance point on the limit-state
surface can be carried out analytically for linear systems using Lagrange multipliers.
The functional whose stationarity yields the solution is
f(y) = y2 +G (y) =Ns=1
y2s+
bk
kNs=1
ys
2S0t
h (k s+ 1)
where y2 is the quantity to be minimized, is the, yet to be determined, Lagrangemultiplier and G(y) = 0 is the constraint. The latter has a form equivalent to that
given in Eq.(2.3-3) but using summation in place of the dot product. The vectorhis
-
8/12/2019 Franch in Thesis
48/147
28 2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS
the discrete counterpart of the system unit-impulse response function h and collects
values ofh at discrete time tk = (k
1)t. Stationarity conditions are obtained
setting to zero the partial derivatives of the functional above with respect to the
components of the solution y and the multiplier
f(y)
ys= 2ys
2S0t h (k s+ 1) H (k s) = 0
f(y)
=bk
kNs=1
ys
2S0t
h (k s+ 1) = 0
where H(k s) is the Heaviside unit-step function. Solving the first of the twoequations with respect to ys one gets
ys=
2
2S0t h (k s+ 1) H (k s)
Substitution ofys in the second equation yields the value of the Lagrange mul-
tiplier
= 2bk
2S0tkNs=1
h2 (k s+ 1)=
2bk2k
in which 2k is the variance of the linear response at time step k
2k = E u2 (k)= E k
s=1
Ysh (k
s+ 1)
2
== E
ks=1
Ysh (k s+ 1)k
q=1
Yqh (k q+ 1)
= 2S0tk
s=1
h2 (k s+ 1)
due to the independence of the acceleration pulses. Finally, the s-th component of
the design point is obtained in the form
-
8/12/2019 Franch in Thesis
49/147
2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS 29
ys
= bk
2k2S0t h (k s + 1) H (k s)
Apart from a constant factor depending on the threshold bk at time tk and on the
intensity of the white noise base excitation S0, one sees that the design point is, for
ts tk, proportional to the mirror-image of the unit-impulse response function ofthe system6, and zero afterward as implied by the Heaviside step function.
The discrete counterpart of the corresponding input base acceleration process is
simply proportional to the design point
Y (s) =Yst
=
2S0
t ys
In Figure(2-6) the displacement unit-impulse response function h of a linear
visco-elastic system with period T = 1sec and damping ratio = 0.10 is plotted
together with the non-stationary variance of this system responseu(t) to a stationary
white noise excitation of intensity S0= 1m2/sec3. Also plotted are the design point
excitation W(t) for a threshold b = 0.5mat time tk = 8sec and the corresponding
design point response. The response reaches the assigned threshold for the firsttime at tk = 8sec and having an horizontal tangent, i.e. with zero kinetic energy.
The latter condition implies that the state of the system is one of minimum for
the potential energy among all those for which the threshold is attained. This
is one more way to see that this solution is optimal: the optimality requirement
in terms of potential energy (minimize potential energy given that response has
reached the threshold at time tk) has been shown to be equivalent to that in terms
of displacement in [40].
It is again observed that for any threshold and excitation the design point atany time instant is known analytically, i.e. without the necessity of performing
any numerical optimization, once the system unit-impulse response is known. This
is true also for the more general non-white non-stationary excitations presented
before, as for example the amplitude modulated filtered white-noise processes, once
6In fact for s1 < s2 one hash (k s1+ 1) < h (k s2+ 1)
-
8/12/2019 Franch in Thesis
50/147
30 2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS
0 5 100.2
0.15
0.1
0.05
0
0.05
0.1
0.15
t [sec]
h[m]
(a)
0 5 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
t [sec]
[m]
(b)
0 5 106
4
2
0
2
4
6
8
t [sec]
W* [m/sec
2]
(c)
0 5 100.4
0.2
0
0.2
0.4
0.6
t [sec]
u* [m]
(d)
Figure 2-6: Design point for a linear system under stationary Gaussian white noise
excitation: (a) unit-impulse response function; (b) variance of the response; (c)design-point excitation; (d) design-point response.
the system is redefined to include the dynamics of both the filter and the structure
and the envelope function is taken into account.
Considering again Figure(2-6(c)) one observes that the design point excitation
is, as anticipated, a nearly harmonic function of time with gradually increasing
amplitude and frequency that, in this case, coincides with that of the system. It
compares oddly with the sample of the stationary white noise shown in Figure(2-
7), but the difference is understood once it is recognized that, while this ground
acceleration corresponds to the minimum ofy conditionalony lying on the limit-state surface, the acceleration sample in Figure(2-7) is totally random and, for this
-
8/12/2019 Franch in Thesis
51/147
2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS 31
reason, the comparison is not a proper one.
The reliability index corresponding to the design point evolves with time inverselywith the response standard deviation as shown by
k = y = N
s=1
(ys)2 =
ks=1
(ys)2 =
bkk
and is plotted in Figure(2-8) for the same system and excitation of Figure(2-6). One
can see that the distance of the hyperplane from the origin decreases quickly with
time and becomes constant when the response attains stationarity.
0 2 4 6 8 10100
80
60
40
20
0
20
40
60
80
100
t [sec]
W(t)
Figure 2-7: White noise sample.
0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
t [sec]
Figure 2-8: Reliability index evolutionwith time.
2.3.3 From the elementary excursion events to the first ex-cursion event: non-linear systems and mean out-crossingrate
Having studied the elementary excursion event one can now focus on the more
complex first excursion event and on the computation of the associated probability.
Since failure at any time tk implies first-excursion failure, the failure domainFof this event is the union of the elementary domains Fk or, in the terminology
-
8/12/2019 Franch in Thesis
52/147
32 2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS
of systems theory, the component events are arranged in series to give the first
excursion one. This can be written as
F=Nk=1
Fk =Nk=1
{bk u (tk) 0}
where for linear systems Fk is thek-th half-space having normalk and distancekfrom the origin.
For non linear systems Fk, the boundary ofFk, is non linear and numericaloptimization is necessary. Performing FORM at each time step tk is clearly not
an option. In this case an approximate solution is offered by the mean crossing
rate k of excursion above level bk. In fact, assuming that the system starts in the
safe domain7, the probability of failure for the first excursion event in time D is
the complement of the probability of having zero crossings within D, hence we can
write, denoting by N(D) the number of crossings in D,
Pf= 1
Pr
{N(D) = 0
}=
n=1
Pr
{N(D) =n
}
n=1
n Pr {N(D) =n} = E [N(D)] = D0
(t) dt (2.3-5)
The right-most integral in the inequality above constitutes an upper bound to
Pfand can be computed by a small number of evaluations of the integrand function
(t), since the mean crossing rate variation is much slower than that of the process
itself. It is clear that the quality of the bound in Eq.(2.3-5) strongly depends on
how large is bk with respect to the response standard deviation k and that it canbe reliably used only when the probability of having two or more crossings in dt is
negligible with respect to Pr{N(D) = 1}.What is now needed is a way to compute the mean crossing rate inside the
framework that has been presented in this chapter, i.e. for processes reduced to
7The point y0 representing the system and the loads at time t0 = 0 belongs to the safe domain.
-
8/12/2019 Franch in Thesis
53/147
2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS 33
vectors of time-invariant random variables . It is now appropriate to observe that,
beside the load variables that come from the earthquake process discretisation,
the vector can include additional non-load variables chosen to represent random
mechanical properties of the analysed structure. One can imagine that also these
additional variables come from discretisation of random fields describing material
properties variation over the structural domain.
If g (t, ) = g [u (t, )] denotes a time-dependent scalar limit-state function de-
fined in the physical space of the basic random variables as a function of the
response process u (t, ) in the usual way such as g > 0 defines the set of safe
values of and g 0 the corresponding set of failure values, one can computethe bound given in Eq.(2.3-5) using the mean crossing rate g(t) of g(t) below the
threshold g= 0.
Starting from the original derivation of Rice formula for the crossing rate [54], it
is easily seen that, essentially, the probability of having a crossing at time t is given
by the probability that the limit-state function is above zero at time t and below it
at time t+t, infinitely close to t. Hence the mean crossing ratecan be computed
as [36]
(t) = limt0
P r {g1() 0 g2() 0}t
(2.3-6)
where the two time-independent limit state functions are defined as follows
g1() = g(u(, t)) (2.3-7)g2() = g(u(, t+t)) = g(u(, t)) + ug(u(, t))u(, t)t (2.3-8)
in terms of the time-dependent limit-state function g. For the solution of Eq.(2.3-6),
one might think of using directly as random variablesu(t) andu(t + t) oru(t) and
u(t) as for the second equality in Eq.(2.3-8). This would be unpractical, or even
unfeasible, due to the difficulty of determining the joint PDF of the two functions8.
Since this latter probability distribution is needed for the transformation from the
original to the standard normal space, it is in any case convenient to work in terms
8It is recalled that only for stationary Gaussian response the displacement and the velocityprocesses are independent.
-
8/12/2019 Franch in Thesis
54/147
34 2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS
of the basic variables , even if this implies in general a considerable increase in the
problem dimension given that may include several hundreds of random pulses ys,
in addition to the subset of mechanical parameters.
The event whose probability appears in the numerator of Eq.(2.3-6) is a par-
allel event [36], the intersection of the component events. A first order (FORM)
approximation to the probability of the intersection is given by
Pf=2(1, 2, 12) = (1) (2) + 120
2(1, 2, ) d (2.3-9)
where 2() and () are the standard normal bivariate PDF and univariate CDFrespectively,i is the reliability index for limit state function Gi(y) =gi((y))
9 and
the correlation coefficient between the two linearized events G1 = 0 and G2 = 0
is given by the dot product of their alpha vectors 12 = T12, see Appendix
SectionA.1.3.3. In Figure (2-9) the two limit-state surfaces and their linear ap-
proximation at their respective design points are shown in the standard normal
space. It is noted that the computation of the bivariate (and, more generally, of the
n-variate) Gaussian CDF is numerically difficult, especially when the correlationcoefficient between the events is close to 1 as in this case. A number of algorithmsare available to perform the integral (2.3-9), see for example [1].
It is recalled that the computationally most expensive part of the FORM analysis
is the search for the design point. Efficient algorithms to perform this task require
computation of the gradient of the limit-state function in the basic variables space.
Computation of this gradient by finite differences is prohibitive and hence a direct
approach is necessary to optimize computation. Postponing a detailed discussion
of this issue to the next chapter, only the expressions of the gradients ofG1 and
G2 are given here, which are easily obtained by making use of the chain rule of
differentiation
9Being the design point defined as the point of minimum distance in the standard normal space,it is in this latter space that the search procedure is carried out.
-
8/12/2019 Franch in Thesis
55/147
2. FORM SOLUTION OF RANDOM VIBRATION PROBLEMS 35
Figure 2-9: Crossing rate as parallel event (FORM approximation).
yG1=
g1Jy=
ugJuJy (2.3-10)
yG2 = g2Jy= (ugJu+ u(ug) ut + ugJut) Jy (2.3-11)
where Jrs are jacobian matrices of derivatives ri/sj .
It is recalled that the vector is not limited to those load random variables
that come from the discretisation of the input random process but can include
any number and kind of random variables chosen to describe randomness in the
mechanical parameters governing both the dynamic response of the structure and
the capacity of the considered failure mechanisms. This is an important feature
of this FORM-based approximate solution of the first-excursion problem, as it is
the fact that inelastic material behavio