El Modelo Geometrico en Fotogrametrico HOY (1)
38
EL MODELO GEOMETRICO EN FOTOGRAMETRIA
-
Upload
richard-silvestre-gomez -
Category
Documents
-
view
21 -
download
0
description
fotogrametria
Transcript of El Modelo Geometrico en Fotogrametrico HOY (1)
EL MODELO GEOMETRICO EN FOTOGRAMETRIA
EL MODELO GEOMETRICO EN FOTOGRAMETRIA
1. MODELO GEOMETRICO BASICO:Cuando se obtiene una fotografía de un objeto disponemos idealmente de una representación o imagen perspectiva del mismo.

Consideremos una fotografía aérea tomada a una altura que todo punto objeto se forme en el plano focal del objetivo.
2. SISTEMA DE REFERENCIA IMAGEN:Las marcas fiduciales tienen un papel fundamental en todo proceso fotogramétrico analítico, ya que las líneas que unen marcas fiduciales opuestas se intersecan en un punto denominado centro de colimación y las cámaras aéreas se fabrican de tal forma que este punto coincida o este muy próximo al punto principal.

El sistema de referencia que se adopta usualmente para definir coordenadas fotográficas es un sistema de ejes cartesianos materializado por las rectas que unen marcas fiduciales opuestas tal y como se indica en la figura.

En fotogrametría aérea, el eje x se elige como la línea fiducial que define con mayor aproximación la dirección del vuelo, positivo en esta dirección; el eje y es la otra línea orientado de tal forma que resulte un sistema directoEn este sistema a las coordenadas (x, y) de los puntos imagen las denominaremos foto-coordenadas

3. ALTERACIONES EN LA MÉTRICA DE LA IMAGEN: FACTORES FÍSICOS, INFLUENCIA DE LA CÁMARA MÉTRICA, DEL AVIÓN Y DE LA PELÍCULA:Se van a ver las " deformaciones " de la imagen, entendiendo por deformación el conjunto de efectos que alteran la posición de los puntos imagen respecto a los que le son asignados por las leyes de la perspectiva.

3.1 Factores físicos: 3.1.1 Esfericidad terrestre:
A través de la fotogrametría, se busca una representación plana de la superficie terrestre.
Esta "distorsión" es pues, función del tipo de representación adoptado.
Puede suponerse en general:
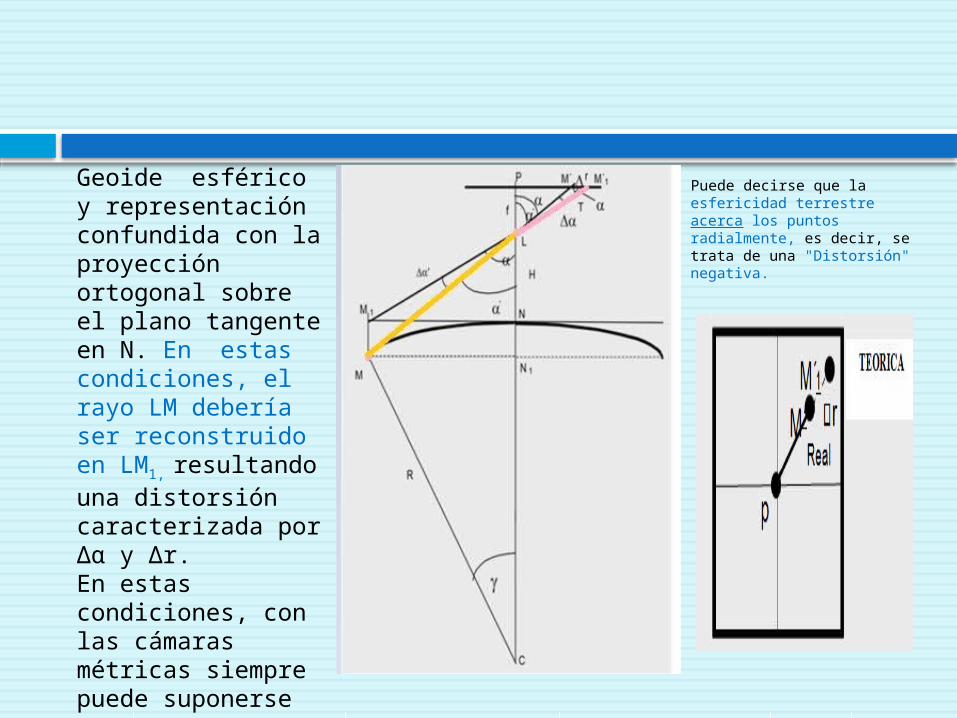
Puede decirse que la esfericidad terrestre acerca los puntos radialmente, es decir, se trata de una "Distorsión" negativa.
Geoide esférico y representación confundida con la proyección ortogonal sobre el plano tangente en N. En estas condiciones, el rayo LM debería ser reconstruido en LM1,
resultando una distorsión caracterizada por Δα y Δr. En estas condiciones, con las cámaras métricas siempre puede suponerse que Δα = Δα′

3.1.2 Refracción atmosférica: Es el resultado de variaciones de la
densidad de la atmósfera con la altitud, lo que da lugar a que esta no sea un medio homogéneo y tenga un índice de refracción variable.
Esta circunstancia ocasiona que los rayos luminosos no sean líneas rectas sino curvas planas.
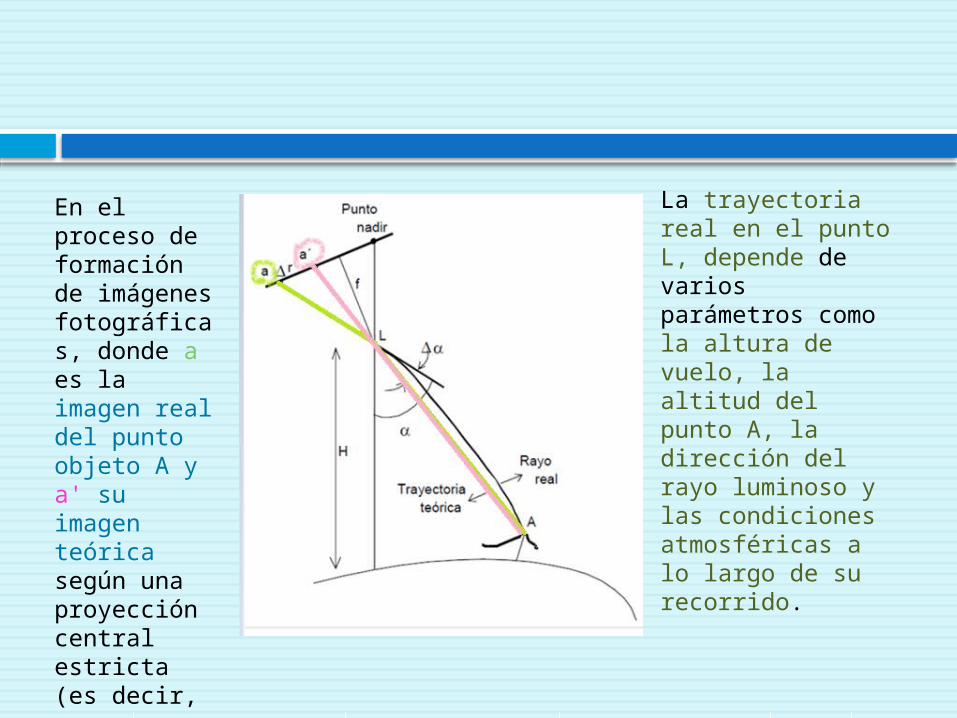
La trayectoria real en el punto L, depende de varios parámetros como la altura de vuelo, la altitud del punto A, la dirección del rayo luminoso y las condiciones atmosféricas a lo largo de su recorrido.
En el proceso de formación de imágenes fotográficas, donde a es la imagen real del punto objeto A y a' su imagen teórica según una proyección central estricta (es decir, en condiciones de homogeneidad).

Δα = K tg α Donde la constante K es función de los factores
mencionados anteriormente. Así por ejemplo, en condiciones atmosféricas estándar esta constante puede calcularse a partir de las ecuaciones:
K = ( T / ρ ) - [ ( Q0 - QA ) / (H0 - HA ) ] donde ρ = 636620 y T, Q0 y QA son funciones
polinómicas de H0 y HA. En estas son la altura de vuelo y la altitud del
puntofórmulas H0 y HA A sobre el nivel del mar, respectivamente.

La refracción aleja los puntos de sus posiciones teóricas estamos ante una distorsión positiva, es decir, contraria a la esfericidad.

3.1.3 Efecto conjunto esfericidad – refracción:
Como en Topografía y Geodesia, las dos causas operan conjuntamente y en sentido contrario (la refracción tiende a disminuir la esfericidad) aunque el efecto de esfericidad es 4 - 5 veces el de refracción.
Tenemos: Δr = Δr esf.- Δr ref.
Δr =distancia respecto a a( es la imagen real del punto objeto A) y a' su imagen teórica

3.2 Influencia de la cámara métrica: Es una cámara fotográfica ya sea tradicional o digital.
3.2.1La óptica:La imagen de un punto objeto no es un punto sino un círculo, incluso en el plano de óptimo enfoque. Estas imperfecciones de la imagen se denominan aberraciones y considerando luz monocromática se clasifican en aberración esférica, coma, astigmatismo, curvatura de campo y distorsión.

La calidad de la imagen y su efecto conjunto será perturbador en fotogrametría solo si el deterioro de las imágenes impide la identificación de detalles de interés o aumenta la incertidumbre en las medidas.
La distorsión esta relacionada con la posición de la imagen en el plano imagen y no con la calidad de esta. La distorsión es el desplazamiento del punto imagen con respecto de su posición ideal. En un sistema óptico centrado y con simetría de rotación este desplazamiento es radial y, por consiguiente, su medida es siempre lateral.
Esta distorsión radial introduce variaciones en la escala de la fotografía en función de la posición en el plano imagen.
3.2.2 El filtro: El filtro que se acopla en la parte frontal del objetivo de
la cámara, con el fin de conseguir un determinado efecto en la fotografia ,puede ser de vidrio o gelatina.Produciría distorsiones tangenciales y disimetrías en la distorsión radial que se añadirían a las de la cámara, por lo que los filtros deben controlarse antes de su empleo.
3.2.3 La mecánica: Las influencias proceden de:
Un montaje defectuoso del objetivo en la cámara Todo esto produce disimetrías en la ley distribución de la
distorsión.

3.3 Influencias del avión y de la película: En realidad, más que la influencia del avión, lo que interviene son los desplazamientos que puede haber en la toma de fotos durante el vuelo.
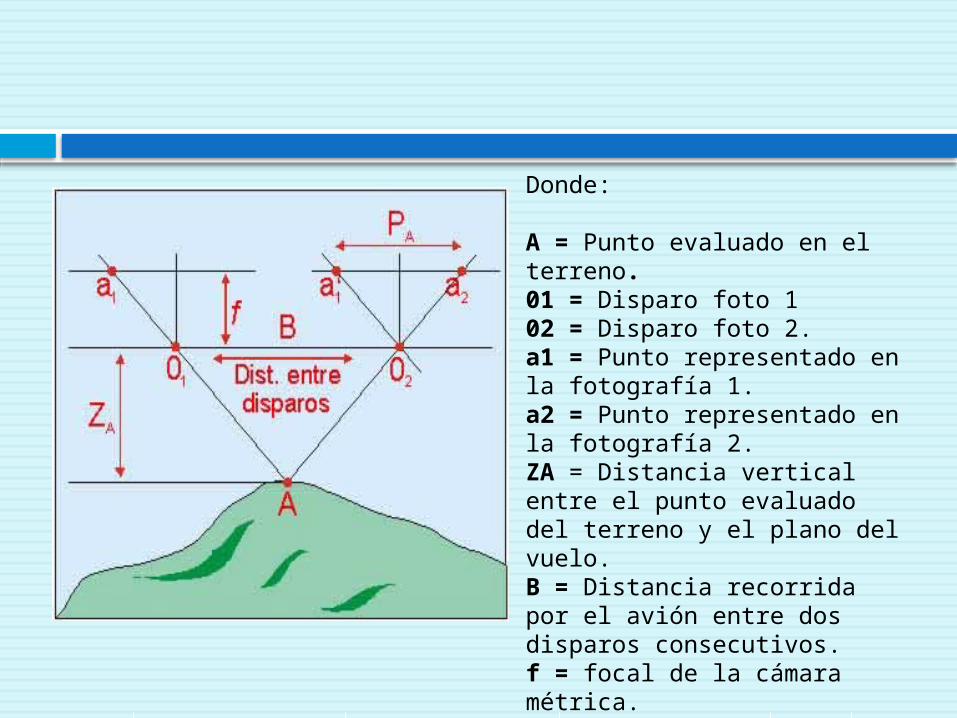
Donde:
A = Punto evaluado en el terreno.01 = Disparo foto 102 = Disparo foto 2.a1 = Punto representado en la fotografía 1.a2 = Punto representado en la fotografía 2.ZA = Distancia vertical entre el punto evaluado del terreno y el plano del vuelo.B = Distancia recorrida por el avión entre dos disparos consecutivos.f = focal de la cámara métrica.PA = Paralaje del punto evaluado (a medir sobre la fotografía).

3.3.1 El obturador: Es un dispositivo encargado de permitir del
paso de la luz a la pelicula durante un corto periodo de tiempo.
Solo se usan los obturadores centrales a pesar de sus inconvenientes como son: Riesgo de desplazamiento de imagen para
grandes escalas. Rendimiento no muy elevado, al no ser los de
menor tiempo de exposición Dificultades de construcción y colocación.

3.3.2 Variaciones de temperatura: La altura de vuelo suele ser grande, las cámaras
métricas están sometidas a variaciones de temperatura importantes.
Si el avión no está presurizado(que es el bombeo activo de aire en la cabina de una aeronave) no es raro encontrar diferencias de temperatura de 50º entre el suelo y el punto de vista. Si lo está, hay que tener en cuenta el vidrio que separa el objetivo del aire exterior, que también tendrá diferencias de temperatura.
El efecto es como si para una variación de temperatura se produjese una diferencia de focal:

La temperatura modifica también: •Índices de refracción. •Posición relativa de las lentes, etc. •Curvatura de las lentes.

3.3.3 Influencia de la película: La pelicula es un material fotosensible que sufre
una alteracion quimica cuando es iluminado .Este cambio es el que guarda la informacion visual del objeto en cada fotografia.
Las películas, en cambio, sufren en el tiempo que sigue a su revelado, contracciones importantes .
Las distorsiones que producen son difíciles de tener en cuenta. Para medir estas deformaciones, algunas cámaras van provistas de una cuadrícula, así puede obtenerse una idea más correcta de la deformación en un punto cualquiera de la placa.

3.3.4 Planeidad: Es más importante la consistencia de la
forma que la planeidad perfecta, pero esta debe asegurarse con error menor de 0,02 a 0,03 mm.
Las placas de vidrio no presentan problemas, pero la película por carecer de forma geométrica propia se debe asegurar su planeidad en la toma. Un defecto de planeidad provoca un desenfoque en la imagen.

3.3.5 Influencias diversas:Efecto Eberhardt o efecto de borde: es debido a un agotamiento rápido del revelador en contacto con una zona muy iluminada y en cambio, una frescura relativa de aquel en contacto con una zona próxima de baja iluminación. Puede producir un desplazamiento geométrico de los límites de dichas zonas.

Conclusiones Hay causas eliminables o reducidas a
despreciables por el empleo de materiales convenientes (filtros, control de soportes, etc.).
Hay causas inevitables (distorsión radial, esfericidad) a veces, además, mal conocidas (refracción atmosférica, temperatura) pero que distorsiones simétricas y sistemáticas. Pueden corregirse y dejan residuos de pocas micras.

Hay causas irregulares y disimétricas (la distorsión tangencial, defectos mecánicos de cámaras, defectos de los soportes). Son las influencias mas graves, pues no son cómodas de controlar ni de medir. Uno de los objetos del calibrado es ponerlas en evidencia.

4. CALIBRADO DE CÁMARAS MÉTRICAS ANALÓGICAS:
La mayoría de los procesos de calibrado se hacen en laboratorio y por el propio fabricante.
Otros procesos se hacen en campo fotografiando desde el suelo o desde el aire un conjunto de señales materializadas en el terreno y cuyas posiciones relativas son conocidas con la suficiente precisión.
4.1 Calibración por multicolimador:
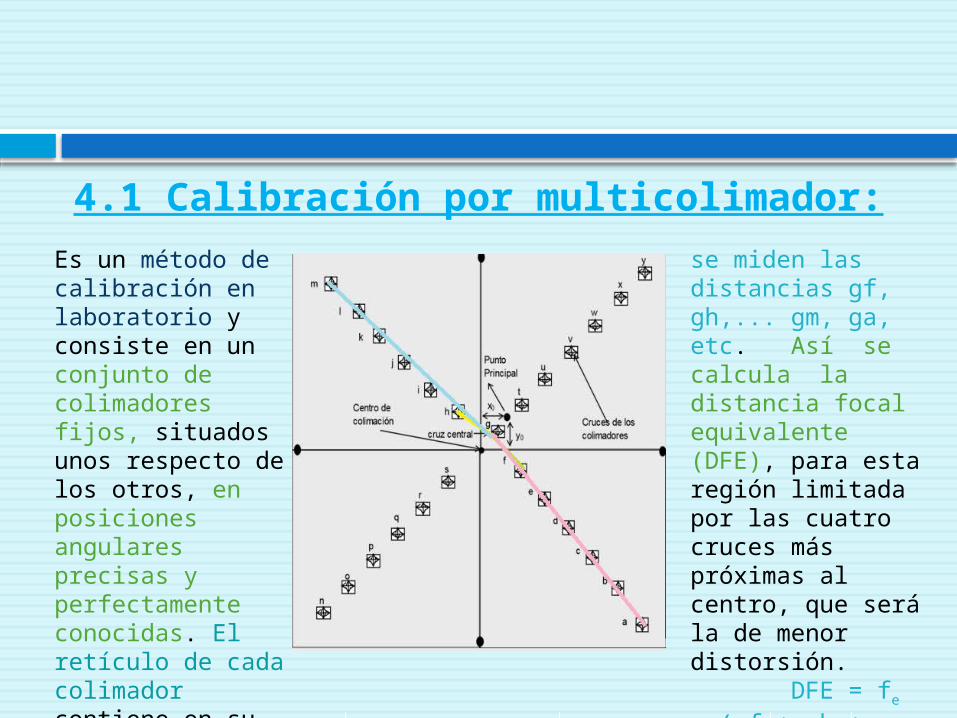
Es un método de calibración en laboratorio y consiste en un conjunto de colimadores fijos, situados unos respecto de los otros, en posiciones angulares precisas y perfectamente conocidas. El retículo de cada colimador contiene en su plano focal una pequeña cruz.
se miden las distancias gf, gh,... gm, ga, etc. Así se calcula la distancia focal equivalente (DFE), para esta región limitada por las cuatro cruces más próximas al centro, que será la de menor distorsión. DFE = fe = (gf + gh + gs + gt) / 4tagθ

4.2 Autocalibración:Consiste en la toma de fotos en un área de test o polígono experimental, en el que se disponen de una serie de puntos pre-señalizados y cuyas coordenadas se conocen con gran precisión.

El modelo más conocido es el de Brown, padre de la técnica de calibración analítica, siendo 21 los parámetros de autocalibración y se seleccionan de acuerdo a causas físicas de errores sistemáticos como son la distorsión radial y por descentramiento de las lentes, deformaciones de la película, y otros coeficientes que definen la curvatura y falta de planeidad de la película.
5. CORRECCIONES A LAS FOTO-COORDENADAS:5.1 Deformación del material fotográfico: El material fotográfico esta sujeto a deformaciones
durante el tiempo que transcurre entre la toma de la fotografía.
Para poder evaluar esta deformación se obtiene la distancia teórica dada por la calibración de la cámara entre los marcadores fiduciales opuestos, y se comparan estas distancias con las correspondientes distancias medidas sobre la fotografía, las diferencias obtenidas nos permiten determinar las deformaciones lineales en las direcciones de los ejes fiduciales.

5.2 Distorsión: Distorsión Radial : Deduzcamos ahora las fórmulas de
corrección por distorsión radial de las foto-coordenadas medidas.

donde (x, y) son las foto-coordenadas medidas en el comparador, (x', y') las foto-coordenadas corregidas, r la distancia del punto imagen al punto principal y k (i=1,..,4) los coeficientes de distorsión radial.

Distorsión por Descentramiento: Por lo que respecta a la distorsión por
descentramiento, según el modelo de Conrady-Brown, sus dos componentes radial y tangencial se describen analíticamente según las expresiones:
δr = 3 (J1 r2 + J2 r4 + ...) sen (ϕ - ϕ0) δt = (J1 r2 + J2 r4 +…) cos (ϕ - ϕ0)
donde Ji son los coeficientes de distorsión, ϕ el ángulo polar del punto imagen con respecto al eje x, y ϕ0 el ángulo entre el eje x y una línea de referencia denominada eje de máxima distorsión tangencial (donde además δr = 0). Obsérvese que la distorsión tangencial es nula sobre la recta

Los parámetros de distorsión son ahora los coeficientes Ji y el ángulo ϕ0.
5.3 Refracción atmosférica: Las foto-coordenadas corregidas, se
calculan así: x”a = (r” / r) xa ,
y”a = (r” / r)ya

5.4 Esfericidad: Obteniéndose (x”a, y”a) coordenadas corregidas por esfericidad en función de
las (xa, ya) medidas, mediante las expresiones:
x”a = (r” / r) xa ,
y”a = (r” / r) ya