smart traffic final
14
SMART TRAFFIC Ishita Grover Nadeesh Gupta [email protected] [email protected] Mrs. Seema Nayak ( Assist Prof Electronics Dept.) [email protected] 1. Abstract The paper written presents a fuzzy contr ol sy stem for “ SMART TRAFFIC” . It prov ides a minimum cost mo del which is helpful in transportation problem . The problems of transportation is one o f the earliest applications of linear programming problems. . The objective of the problem is to determine determine the optimum amounts of a commodity to be transported from various supply points to various demand points so that the transportation cost is a reduced. The cost of transporting one unit from a particular supply point to the particular demand point, the amounts is available at the supply points and the amounts required at the demand poi nts are the parameters of the problem. Transportation officials and carmakers are working steadily to improve the “crashworthin ess” of vehicl es. They’ve mandat ed seat belts, added air bags and electroni c stability control. If yo u meet with an in an accident today, chances of you — and your car — will emerge in much better shape than you would have thought of.[3] . A frequently used means to express the imprecision are the Fuzzy Numbers. Fuzzy numbers are the logic of superset of co nventional Boolean logic which is extended to handle the partial truth- t ruth values betw een "completely true" and the "completely false " values . The name suggests, it is the logic underlying modes of reasoning which are approximate rather than being exact. The importance of fuzzy logic derives is the fact that the most modes of human reasoning and especially the common sense reasoning are approximate in the nature. The essential characteristics of the fuzzy logic are .[2] In fuzzy logic, exact reasoning is viewed as athe limiting case of approximate reasoning. In every fuzzy logic everything is a matter of degree. Any logical system can be fuzzified to an extent. In fuzzy logic , knowledge is interpreted as a collection of equality or elasticity. Fuzzy constraints are on the collection of variables . Inference is viewed as the process of propagation of the elastic constraints. An algorithm to obtain the integer optimal solution has been presented in the paper.This algorithm requires solving of parametric transportation problem with their parameter in the demand and supply values. A procedure for solving the fuzzy solid transportation problem is also pesented. Fuzzy programming and the additive fuzzy p rogramming techniques forthe multi-objective transportation problems are also discussed . A geometric programming approach for the case stud has been taken into consideration.
Transcript of smart traffic final

8/7/2019 smart traffic final
http://slidepdf.com/reader/full/smart-traffic-final 1/14
SMART TRAFFIC
Ishita Grover Nadeesh Gupta
[email protected] [email protected]
Mrs. Seema Nayak ( Assist Prof Electronics Dept.)
1. Abstract
The paper written presents a fuzzy control system for “ SMART TRAFFIC” . It provides a minimum cost model
which is helpful in transportation problem .
The problems of transportation is one of the earliest applications of linear programming problems. . The objective
of the problem is to determine determine the optimum amounts of a commodity to be transported from various
supply points to various demand points so that the transportation cost is a reduced. The cost of transporting one unitfrom a particular supply point to the particular demand point, the amounts is available at the supply points and the
amounts required at the demand points are the parameters of the problem. Transportation officials and carmakers
are working steadily to improve the “crashworthiness” of vehicles. They’ve mandated seat belts, added air bags and
electronic stability control. If you meet with an in an accident today, chances of you — and your car — will
emerge in much better shape than you would have thought of.[3]
. A frequently used means to express the imprecision are the Fuzzy Numbers. Fuzzy numbers are the logic of
superset of conventional Boolean logic which is extended to handle the partial truth- truth values between
"completely true" and the "completely false " values . The name suggests, it is the logic underlying modes of
reasoning which are approximate rather than being exact. The importance of fuzzy logic derives is the fact that the
most modes of human reasoning and especially the common sense reasoning are approximate in the nature.The essential characteristics of the fuzzy logic are .[2]
In fuzzy logic, exact reasoning is viewed as athe limiting case of approximate reasoning.
In every fuzzy logic everything is a matter of degree.
Any logical system can be fuzzified to an extent.
In fuzzy logic , knowledge is interpreted as a collection of equality or elasticity.
Fuzzy constraints are on the collection of variables .
Inference is viewed as the process of propagation of the elastic constraints.
An algorithm to obtain the integer optimal solution has been presented in the paper.This algorithm requires solving
of parametric transportation problem with their parameter in the demand and supply values. A procedure for solving
the fuzzy solid transportation problem is also pesented. Fuzzy programming and the additive fuzzy programming
techniques forthe multi-objective transportation problems are also discussed . A geometric programming approach
for the case stud has been taken into consideration.
8/7/2019 smart traffic final
http://slidepdf.com/reader/full/smart-traffic-final 2/14
2. Fuzzy Control Concepts
The theory proposes a mathematical technique for dealing with the imprecise concepts and the problems that havemany solution Fuzzy control uses fuzzy rules is the most important application in the fuzzy theory. Using a given
procedure originated by Ebrahim Mamdani in the late 70s , three steps are taken to create the fuzzy controller
machine:
1) Fuzzification (Using membership functions to graphically describe a situation)
2) Rule evaluation (Application of the fuzzy rules)
3) Defuzzification (Obtaining the crisp or actual results of the problem)
To understand we take an example of how the fuzzy controls are constructed, consider the following classicsituation of the inverted pendulum. The problem is to balance a pole on the mobile platform that can move in only
two directions ie to the left or to the right. The angle between the platform and the pendulum and the angular
velocity of this angle are chosen to be the inputs of the given system. The speed of the platform is chosen as the
corresponding output of the system. [1]
STEP 1
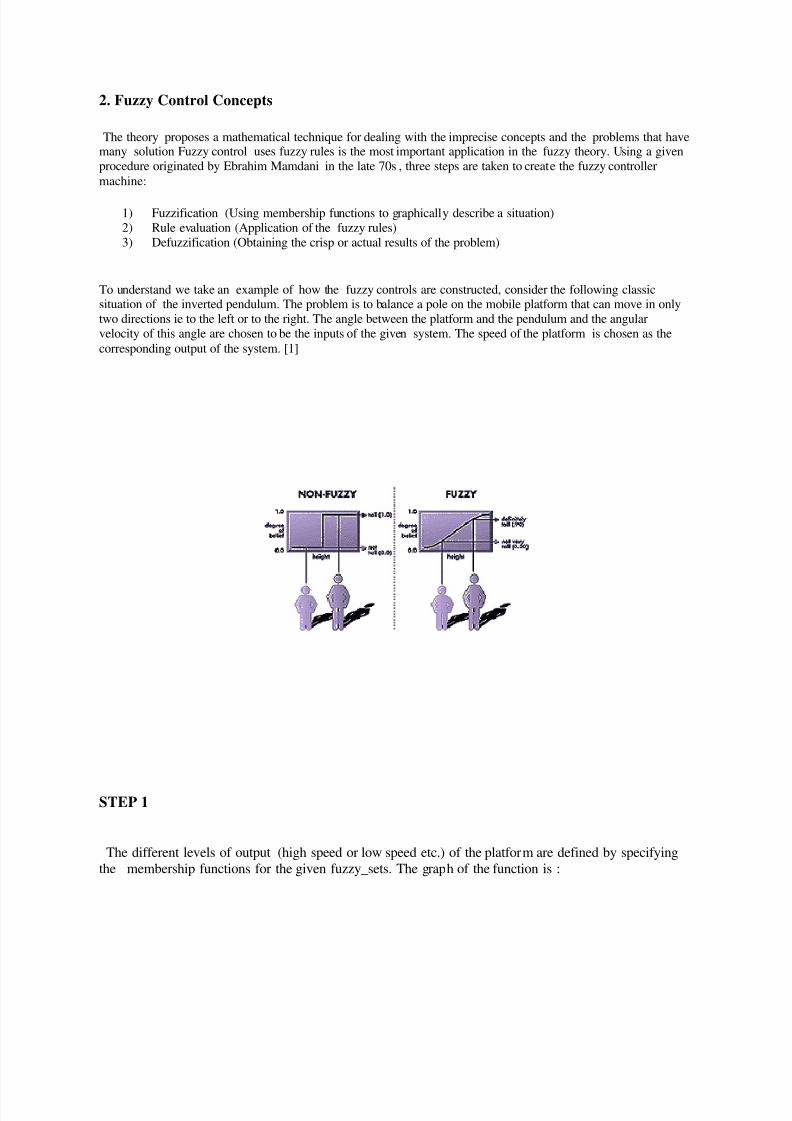
The different levels of output (high speed or low speed etc.) of the platform are defined by specifying
the membership functions for the given fuzzy_sets. The graph of the function is :
8/7/2019 smart traffic final
http://slidepdf.com/reader/full/smart-traffic-final 3/14
The different angles between the platform and the pendulum and the angular velocities are shown below as:

8/7/2019 smart traffic final
http://slidepdf.com/reader/full/smart-traffic-final 4/14
STEP 2
Next step involves the procedure to define the fuzzy rules the fuzzy rules are series of if-then statements and these
statements are usually derived by an expert to achieve the optimum results. The full set of rules is summarised in thetable below and the dashes are for conditions, which have no rules ascociated with them. This is done to simplify the
situation mentioned above to the givn context.
Speed Angle
v negative high Zero Zero negative high zero Zero
e negative low
Zero Zero negative low zero Zero
l zero negative high negative low zero positive low positive high
o positive low Zero zero low zero Zero

8/7/2019 smart traffic final
http://slidepdf.com/reader/full/smart-traffic-final 5/14

8/7/2019 smart traffic final
http://slidepdf.com/reader/full/smart-traffic-final 6/14
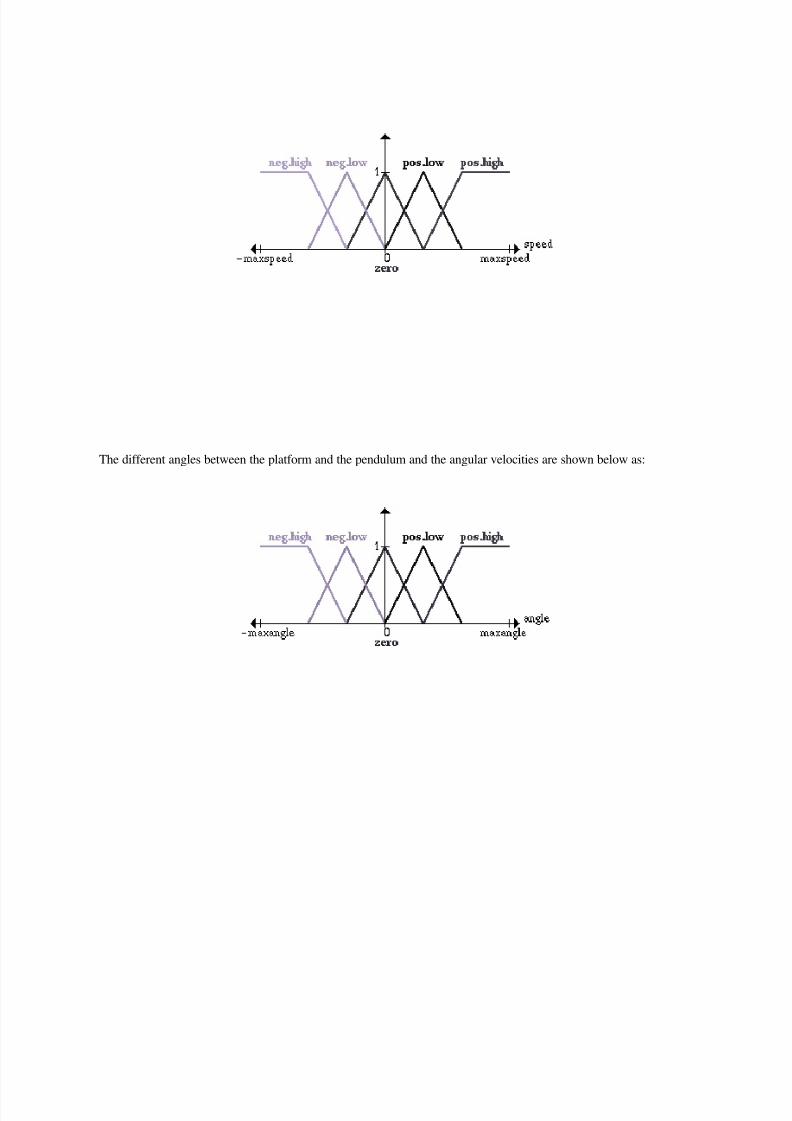
Similarly, the minimum criterion is used for the other three rule. The following figures show the result patches
yielded by rule "if angle is zero and angular velocity is negative low, the speed is negative low", "if angle is positive
low and angular velocity is zero, then speed is positive low" and "if angle is positive low and angular velocity is
negative low, the speed is zero".
8/7/2019 smart traffic final
http://slidepdf.com/reader/full/smart-traffic-final 7/14
GRAPHICAL RESULT
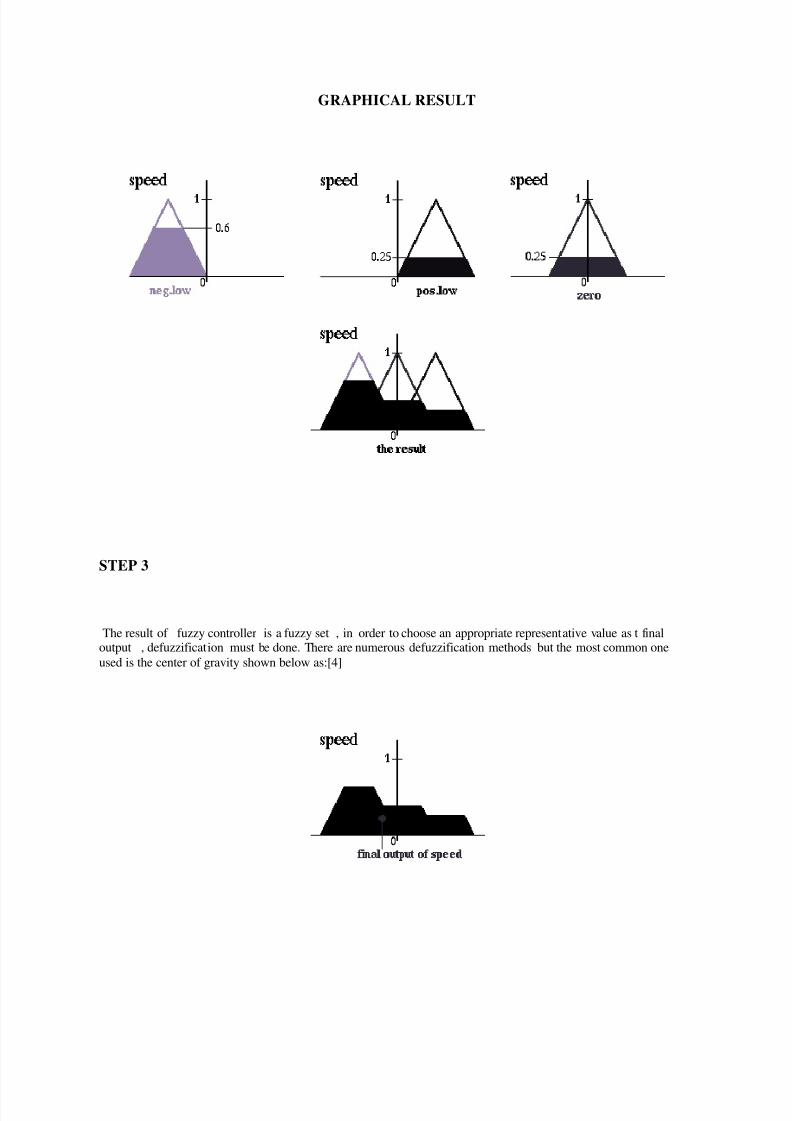
STEP 3
The result of fuzzy controller is a fuzzy set , in order to choose an appropriate representative value as t finaloutput , defuzzification must be done. There are numerous defuzzification methods but the most common one
used is the center of gravity shown below as:[4]
8/7/2019 smart traffic final
http://slidepdf.com/reader/full/smart-traffic-final 8/14
3.Case Study:
Fuzzy Traffic Light Controller
[2]
The case study describes the design procedures of real life application of fuzzy logic: A Smart Traffic LightController. The controller is suppose to change the cycle time depending upon densities of the cars behind green
and red lights and the current cycle of time.
4.Background
In a conventional traffic light controller, the lights change at constant cycle time, which is clearly not the optimalsolution. It would be more feasible to pass more cars at green interval if there are fewer cars waiting behind the red
lights then mathematica l model for this decision is enormously difficult to find however with fuzzy logic, it is
relatively much easier to find the solution.
8/7/2019 smart traffic final
http://slidepdf.com/reader/full/smart-traffic-final 9/14
5.Fuzzy Design
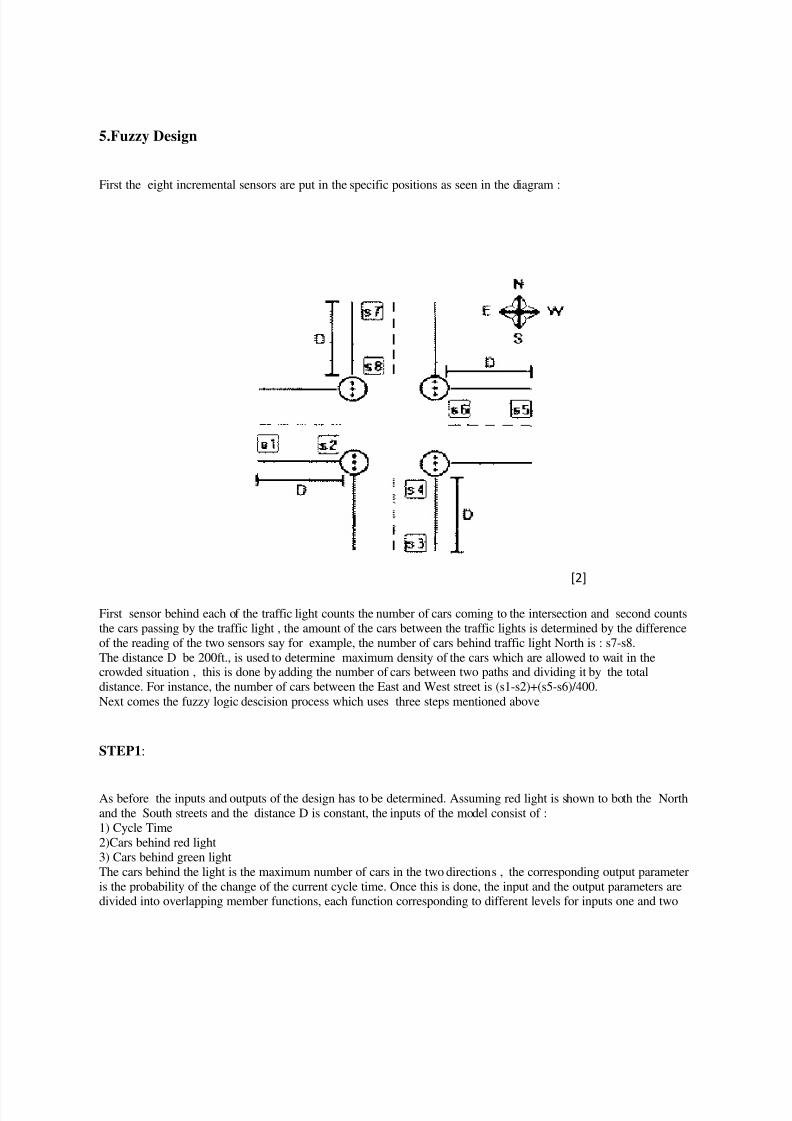
First the eight incremental sensors are put in the specific positions as seen in the diagram :
[2]
First sensor behind each of the traffic light counts the number of cars coming to the intersection and second counts
the cars passing by the traffic light , the amount of the cars between the traffic lights is determined by the difference
of the reading of the two sensors say for example, the number of cars behind traffic light North is : s7-s8.
The distance D be 200ft., is used to determine maximum density of the cars which are allowed to wait in thecrowded situation , this is done by adding the number of cars between two paths and dividing it by the total
distance. For instance, the number of cars between the East and West street is (s1-s2)+(s5-s6)/400.
Next comes the fuzzy logic descision process which uses three steps mentioned above
STEP1:
As before the inputs and outputs of the design has to be determined. Assuming red light is shown to both the North
and the South streets and the distance D is constant, the inputs of the model consist of :
1) Cycle Time
2)Cars behind red light
3) Cars behind green light
The cars behind the light is the maximum number of cars in the two directions , the corresponding output parameter
is the probability of the change of the current cycle time. Once this is done, the input and the output parameters aredivided into overlapping member functions, each function corresponding to different levels for inputs one and two

8/7/2019 smart traffic final
http://slidepdf.com/reader/full/smart-traffic-final 10/14
the levels and their corresponding ranges are zero (0,1) , low (0,7) , medium (4,11) , high (7,18) , and chaos (14,20).For input three , the levels are very short(0,14), short(0,34), medium(14,60), long(33,88), very long (65,100), limit
(85,100). The levels of output are no (0), probably no (0.25), maybe (0.5), probably yes (o.75), and yes(1.0). Note:
For the output, one value (singleton position) is associated to each level instead of a range of values. The
corresponding graphs for each of these membership function is drawn in the similar way as above. [3]
Step2:
The rules, as before are formulated using a series of if-then statements, combined with AND/OR operators , ex: if cycle time is medium the AND Cars Behind the Red is low AND Cars Behind Green is medium, then change is
Probably Not. With three inputs, each having 5 , 5 and 6 membership functions, there are a combination of 150
rules. However using the minimum or maximum criterion some rules are combined to a total of 86.
Step 3:
To get the real crisp value the method used for this system is “ center of gravity “ .it is given as :
Crisp Output={Sum(Membership Degree*Singleton Position)}/(Membership degree)
6. Fuzzy Controller is Better :
1. Testing of the controller : The fuzzy controller has been tested under seven different kinds of traffic
conditions from very heavy traffic to very lean traffic. Of 35 random chosen car densities were grouped
according to the different periods of the day representing those traffic conditions.
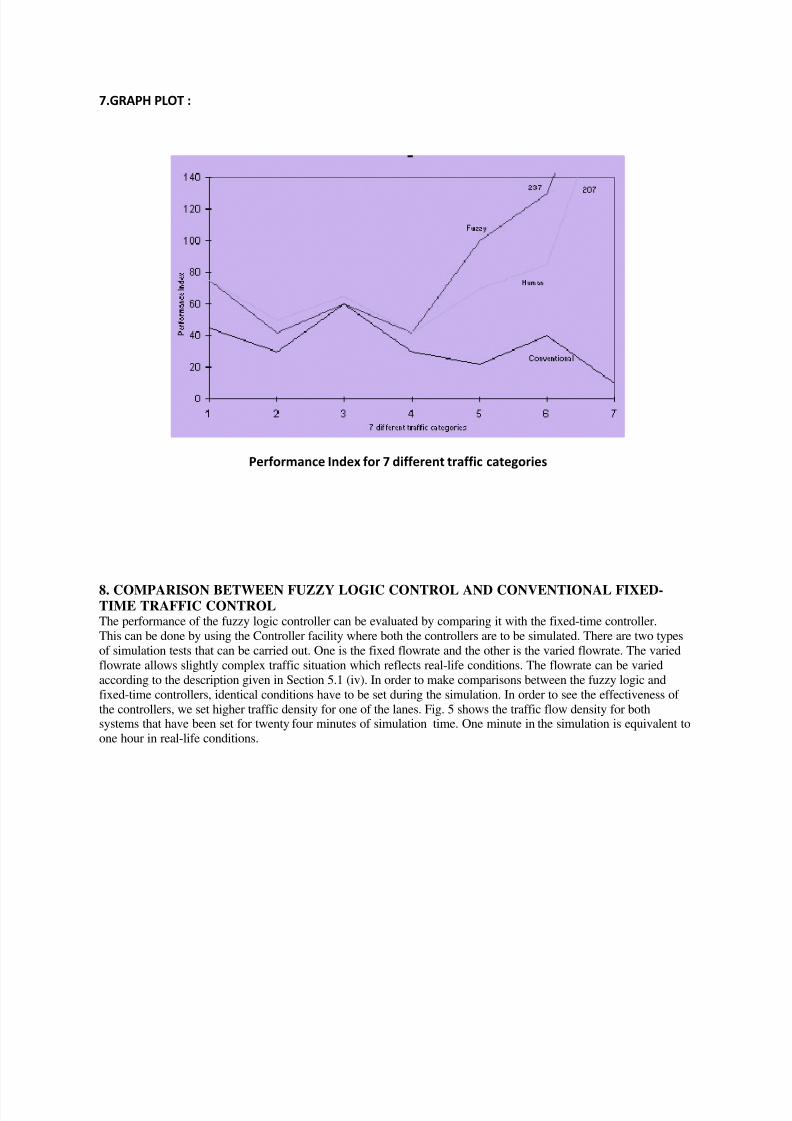
2. Performance evaluation : The performace of controller was compared with that of conventionalcontroller and a human expert , the criteria used for comparison were number of cars allowed to pass at one
time and average waiting time. A performance index which maximises the traffic flow and reduces the
average waiting time was developed. A means of calculating the average waiting time was also developed,
however, a detailed calculation of evaluation is beyond the scope of this article. All three traffic controllerand types were compared and can be summarized with the following graph of performance index in all
seven traffic categories. [5]
8/7/2019 smart traffic final
http://slidepdf.com/reader/full/smart-traffic-final 11/14
7.GRAPH PLOT :
Performance Index for 7 different traffic categories
8. COMPARISON BETWEEN FUZZY LOGIC CONTROL AND CONVENTIONAL FIXED-TIME TRAFFIC CONTROLThe performance of the fuzzy logic controller can be evaluated by comparing it with the fixed-time controller.
This can be done by using the Controller facility where both the controllers are to be simulated. There are two types
of simulation tests that can be carried out. One is the fixed flowrate and the other is the varied flowrate. The varied
flowrate allows slightly complex traffic situation which reflects real-life conditions. The flowrate can be varied
according to the description given in Section 5.1 (iv). In order to make comparisons between the fuzzy logic and
fixed-time controllers, identical conditions have to be set during the simulation. In order to see the effectiveness of
the controllers, we set higher traffic density for one of the lanes. Fig. 5 shows the traffic flow density for bothsystems that have been set for twenty four minutes of simulation time. One minute in the simulation is equivalent to
one hour in real-life conditions.

8/7/2019 smart traffic final
http://slidepdf.com/reader/full/smart-traffic-final 12/14

8/7/2019 smart traffic final
http://slidepdf.com/reader/full/smart-traffic-final 13/14
9.Conclusion
The fuzzy controller passed through 31% more cars, with an average waiting time shorter by 5% than theoretical
minimum of the conventional controller and the performance also measured is 72% higher Which was expected .
However, in comparison with human experts the fuzzy controller passed through 14% more cars with 14% shorter
waiting time and 36% higher performance index and the result is Machine beats Man!!!! . Hence as the Man
gets hungry in finding the new ways of improving our way of life, new smarter machines must be created. Fuzzy
logic provides a simple and an efficient way to meet the above demands and the future of it is limitless.

8/7/2019 smart traffic final
http://slidepdf.com/reader/full/smart-traffic-final 14/14
10. Future Applications
1. Streamed line approach.
2. Saves time .
3.Low effective cost.
4.Reduced chances of accidents.
11.References
1. www.smartconnectedcommunities.org
2. www.streetsmartrental.com
3. www.techpedia.in
4. www.mydigitalfc.com
5. www.classle.net
6. Introduction to Matlab by Rudra Pratap