Presentacion cinematica
16
AUTOR: TEMA 1: CINEMÁTICA DE LA PARTÍCULA REPÚBLICA BOLIVARIANA DE VENEZUELA UNIVERSIDAD NACIONAL EXPERIMENTAL “FRANCISCO DE MIRANDA” ÁREA DE TECNOLIGÍA COMPLEJO ACADEMICO LOS PEROSO UNIDAD CURRICULAR: MECÁNICA RACIONAL ING. JOAN JOSE GIL AROCHA CORO, MARZO DEL 2009
Transcript of Presentacion cinematica

AUTOR:
TEMA 1:
CINEMÁTICA DE LA PARTÍCULA
REPÚBLICA BOLIVARIANA DE VENEZUELA
UNIVERSIDAD NACIONAL EXPERIMENTAL
“FRANCISCO DE MIRANDA”
ÁREA DE TECNOLIGÍA
COMPLEJO ACADEMICO LOS PEROSO
UNIDAD CURRICULAR: MECÁNICA RACIONAL
ING. JOAN JOSE GIL AROCHA
CORO, MARZO DEL 2009
MOVIMIENTO DE UNA
RECTA
DETERMINACIÓN DEL
MOVIMIENTO DE UNA
PARTÍCULA
MOVIMIENTO
RELATIVO
MOV. EN DIFERENTES
SISTEMAS
COORDENADOS
INTRODUCCIÓN
CONTENIDO
TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
Contenido:
1.1 Concepto de Cinemática (Introducción).
1.2 Determinación del movimiento de una partícula (Posición, Velocidad y aceleración).
1.3 Representación del movimiento en diferentes sistemas coordenados.
1.4 Movimiento de una recta (Desplazamiento, Velocidad y Aceleración Angular)
1.5. Movimiento Relativo con Sistema de coordenadas Móvil con traslación pura, combinando la traslación-Rotación.
MOVIMIENTO DE UNA
RECTA
DETERMINACIÓN DEL
MOVIMIENTO DE UNA
PARTÍCULA
MOVIMIENTO
RELATIVO
MOV. EN DIFERENTES
SISTEMAS
COORDENADOS
INTRODUCCIÓN
CONTENIDO
TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
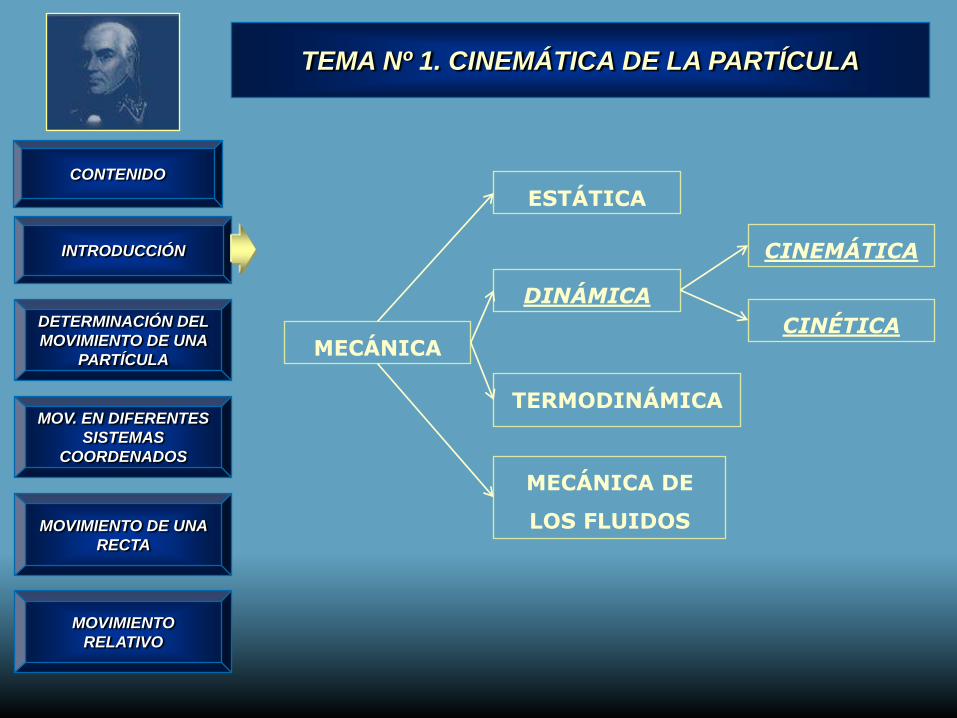
MECÁNICA
TERMODINÁMICA
MECÁNICA DE
LOS FLUIDOS
DINÁMICA
ESTÁTICA
CINEMÁTICA
CINÉTICA

MOVIMIENTO DE UNA
RECTA
DETERMINACIÓN DEL
MOVIMIENTO DE UNA
PARTÍCULA
MOVIMIENTO
RELATIVO
MOV EN DIFERENTES
SISTEMAS
COORDENADOS
INTRODUCCIÓN
CONTENIDO
TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
Vector Posición:
Y
P
r
X
Z
O
1.2 Determinación del movimiento de una partícula

MOVIMIENTO DE UNA
RECTA
DETERMINACIÓN DEL
MOVIMIENTO DE UNA
PARTÍCULA
MOVIMIENTO
RELATIVO
MOV EN DIFERENTES
SISTEMAS
COORDENADOS
INTRODUCCIÓN
CONTENIDO
TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
Vector Velocidad:
P
r
X
Z
O
Y
r
∆r P`
trVm /
dtrdtrV t /)/(lim 0
∆r

MOVIMIENTO DE UNA
RECTA
DETERMINACIÓN DEL
MOVIMIENTO DE UNA
PARTÍCULA
MOVIMIENTO
RELATIVO
MOV EN DIFERENTES
SISTEMAS
COORDENADOS
INTRODUCCIÓN
CONTENIDO
TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
P
XO
Y
P`
tvam /
Vector Aceleración:
v
v
dtvdtva t /)/(lim 0
Z
MOVIMIENTO DE UNA
RECTA
DETERMINACIÓN DEL
MOVIMIENTO DE UNA
PARTÍCULA
MOVIMIENTO
RELATIVO
MOV EN DIFERENTES
SISTEMAS
COORDENADOS
INTRODUCCIÓN
CONTENIDO
TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
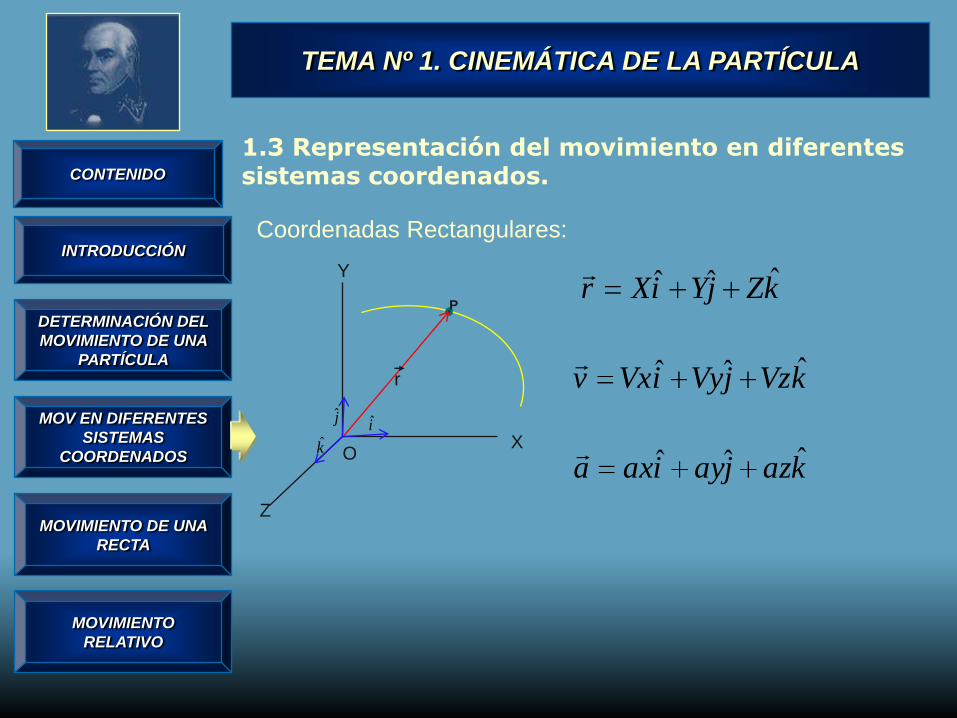
Coordenadas Rectangulares:
1.3 Representación del movimiento en diferentes sistemas coordenados.
Y
P
r
X
Z
O
kZjYiXr ˆˆˆ
ij
k
kVzjVyiVxv ˆˆˆ
kazjayiaxa ˆˆˆ
MOVIMIENTO DE UNA
RECTA
DETERMINACIÓN DEL
MOVIMIENTO DE UNA
PARTÍCULA
MOVIMIENTO
RELATIVO
MOV EN DIFERENTES
SISTEMAS
COORDENADOS
INTRODUCCIÓN
CONTENIDO
TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
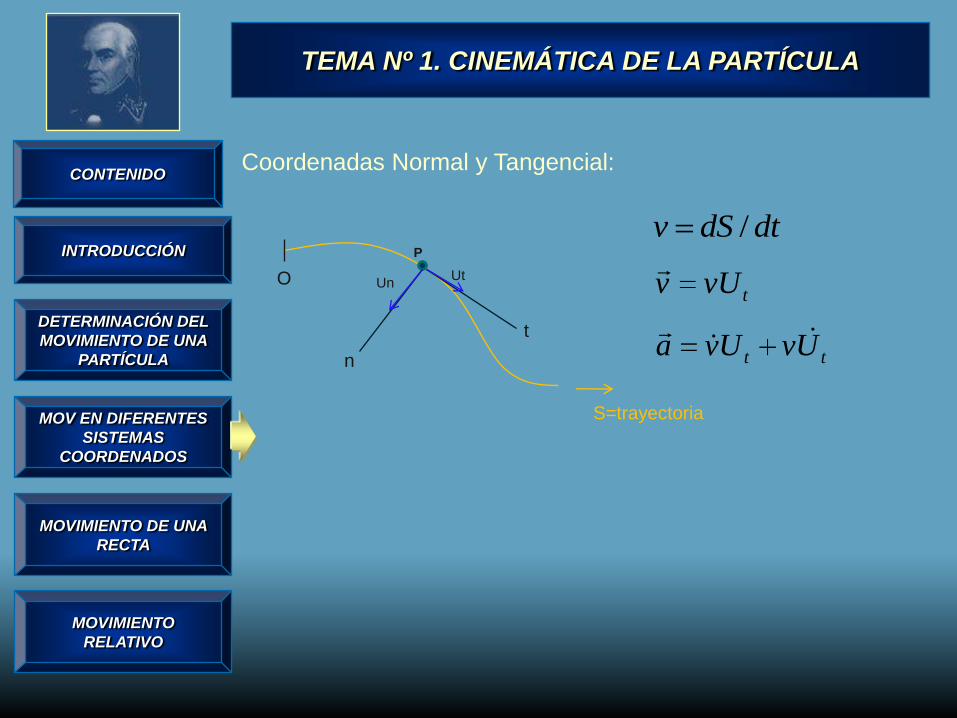
Coordenadas Normal y Tangencial:
O
S=trayectoria
P
t
n
UnUt
tvUv
dtdSv /
tt UvUva

MOVIMIENTO DE UNA
RECTA
DETERMINACIÓN DEL
MOVIMIENTO DE UNA
PARTÍCULA
MOVIMIENTO
RELATIVO
MOV EN DIFERENTES
SISTEMAS
COORDENADOS
INTRODUCCIÓN
CONTENIDO
TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
P
t
Ut
Coordenadas Normal y Tangencial:
P’
t’
Ut’ρ
ρ
O’
∆θ
ds
Ut
∆Ut∆θ
RP *2
1*tU
nUUt
nUtU
nUVtU )/(
nt UvUva )/( 2

MOVIMIENTO DE UNA
RECTA
DETERMINACIÓN DEL
MOVIMIENTO DE UNA
PARTÍCULA
MOVIMIENTO
RELATIVO
MOV. EN DIFERENTES
SISTEMAS
COORDENADOS
INTRODUCCIÓN
CONTENIDO
TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
Coordenadas Polares:
XO
P
θ
r
er
eθ
errr .
ererrv ..
errerrra )2()( 2
MOVIMIENTO DE UNA
RECTA
DETERMINACIÓN DEL
MOVIMIENTO DE UNA
PARTÍCULA
MOVIMIENTO
RELATIVO
MOV. EN DIFERENTES
SISTEMAS
COORDENADOS
INTRODUCCIÓN
CONTENIDO
TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
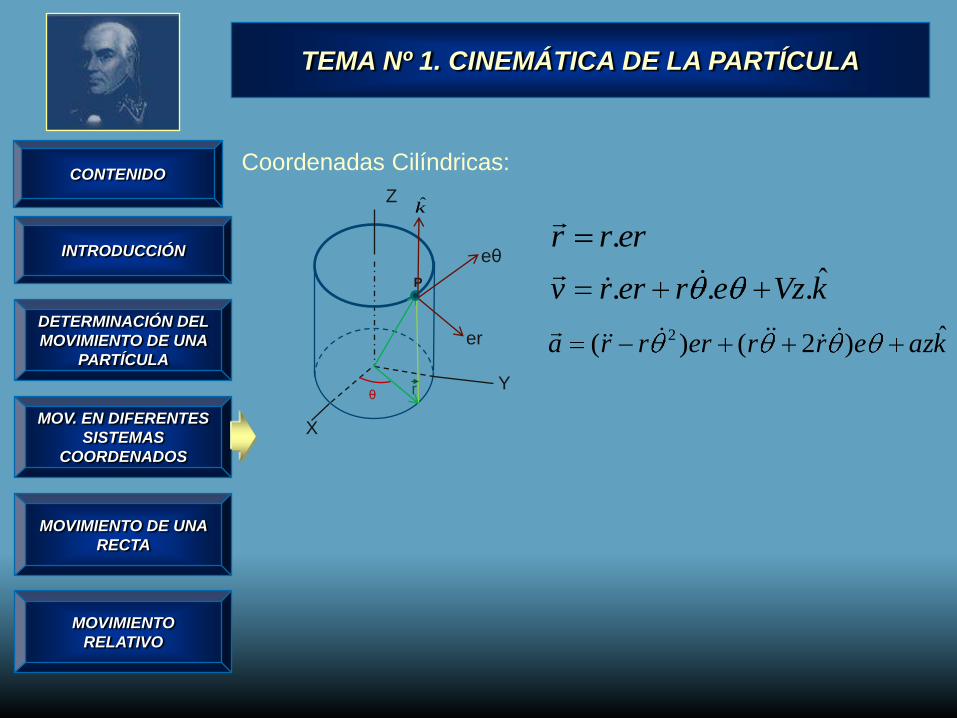
Coordenadas Cilíndricas:
Y
X
Z
θ
P
r
eθ
er
errr .
kVzererrv ˆ...
kazerrerrra ˆ)2()( 2
k

MOVIMIENTO DE UNA
RECTA
DETERMINACIÓN DEL
MOVIMIENTO DE UNA
PARTÍCULA
MOVIMIENTO
RELATIVO
MOV. EN DIFERENTES
SISTEMAS
COORDENADOS
INTRODUCCIÓN
CONTENIDO
TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
Coordenadas Esféricas:
eθ
er
θ
P
Ф
r
eФ
Y
X
Z
errr .
eresenrerrv ...
ersenrrra )( 222
esenrrsenr )cos22(
esenrrr )cos2( 2
r

MOVIMIENTO DE UNA
RECTA
DETERMINACIÓN DEL
MOVIMIENTO DE UNA
PARTÍCULA
MOVIMIENTO
RELATIVO
MOV. EN DIFERENTES
SISTEMAS
COORDENADOS
INTRODUCCIÓN
CONTENIDO
TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
1.4 Movimiento de una recta (Desplazamiento, Velocidad y Aceleración Angular)
AB
B’
AB
B’
θ ∆θ
twm /
dtdtw t /)/(lim 0
twm /
wdtwdtwt
/)/(lim 0

MOVIMIENTO DE UNA
RECTA
DETERMINACIÓN DEL
MOVIMIENTO DE UNA
PARTÍCULA
MOVIMIENTO
RELATIVO
MOV EN DIFERENTES
SISTEMAS
COORDENADOS
INTRODUCCIÓN
CONTENIDO
TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
1.5. Movimiento Relativo con Sistema decoordenadas Móvil con traslación pura,combinando la traslación-Rotación.
Traslación pura:
Y
X
Z
O
B
A
rA
rB
y
x
z
o
rA/B
ij
k
I
J
K
ABAB rrr /
KzJyIxr ABˆˆˆ
/
ABAB vvv /
ABAB aaa /

MOVIMIENTO DE UNA
RECTA
DETERMINACIÓN DEL
MOVIMIENTO DE UNA
PARTÍCULA
MOVIMIENTO
RELATIVO
MOV EN DIFERENTES
SISTEMAS
COORDENADOS
INTRODUCCIÓN
CONTENIDO
TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
Sistema de coordenadas Móvil con traslación-Rotación :
Y
X
Z
O
B
A
rA
rB
y
x
z
o
rA/
B
ij
k
I
J
K
ABAB rrr /
KzJyIxr ABˆˆˆ
/
)ˆˆˆ()ˆˆˆ(/ KzJyIxKzJyIxr AB
ABAB rvv /
IxI ˆˆ
ABABAB vrxvv // )(
ABABABAB vrxrxaa /// )()(
ABABAB avxv /// )(
ABABABABAB avxrxxrxaa //// )2()()(

TEMA Nº 1. CINEMÁTICA DE LA PARTÍCULA
![cinematica differenziale e statica differenziale... · Controllo dei robot - Cinematica differenziale e statica- P. Rocco [2] Cinematica differenziale e statica Parte I Cinematica](https://static.fdocuments.net/doc/165x107/5fec7e0b62510a5eba1dc9d2/cinematica-differenziale-e-statica-differenziale-controllo-dei-robot-cinematica.jpg)