
Mikael Forsberg - linearalgebra.se · Den h¨ar boken ¨ar typsatt av f ¨orfattaren med hj ¨alp...
23
Version 0.82 Linj¨ ar algebra kapiltet fr˚ an ett ODE-kompendium Mikael Forsberg 2010 10 28
Transcript of Mikael Forsberg - linearalgebra.se · Den h¨ar boken ¨ar typsatt av f ¨orfattaren med hj ¨alp...

Version 0.82
Linjar algebra kapiltet fran ett ODE-kompendium
Mikael Forsberg
2010 10 28

Den har boken ar typsatt av forfattaren med hjalp av LATEX.Alla illustrationer ar utforda av Mikael Forsberg med hjalp av xfig .
Stockholm 2006-2010c© Mikael Forsberg

Innehall
1 Komplettering i linjar algebra 11.1 Om baser till vektorrum . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Baser for radrum, kolonnrum och nollrum till en matris . 41.1.2 Ortogonala och ortonormala baser . . . . . . . . . . . . . 6
1.2 Matrisen som avbildning . . . . . . . . . . . . . . . . . . . . . . . 81.3 Linjara operatorer . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3.1 Isometrier . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.4 Egenvarden och egenvektorer . . . . . . . . . . . . . . . . . . . . 12
1.4.1 Anvandningar av egenteorin . . . . . . . . . . . . . . . . . 141.5 Blandade ovningsuppgifter . . . . . . . . . . . . . . . . . . . . . . 16
c© Mikael Forsberg 2010

ii INNEHALL
c© Mikael Forsberg 2010

Figurer
1.1 Figur till exempel 1.2.5 . . . . . . . . . . . . . . . . . . . . . . . 101.2 Ellipsen som ges av ekvation (1.6), har atergiven med sina sym-
metriaxlar. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.3 I de nya variablerna X och Y blir var sneda ellips i stallet en
vanlig ellips som ligger symmetriskt kring de nya axlarna. Noteraatt de nya axlarna ar symmetrisaxlarna till den sneda ellipsensom vi sag i figur 1.2 . . . . . . . . . . . . . . . . . . . . . . . . . 17
c© Mikael Forsberg 2010

iv FIGURER
c© Mikael Forsberg 2010

Kapitel 1
Komplettering i linjaralgebra
1.1 Om baser till vektorrum
Om vi tar en vanlig vektor (a, b) sa betyder denna att vi tar a steg langs x-axelnoch b steg langs y-axeln. Eftersom dessa axlar har riktningar som vi beskrivermed vektorerna ex = (1, 0) och ey = (0, 1) sa kan vi skriva
(a, b) = a(1, 0) + b(0, 1),
och man sager att (a, b) ar en linjarkombination av vektorerna ex och ey.Poangen ar ocksa att alla vektorer i planet kan beskrivas pa detta satt. Mansager att vektoruppsattningen S2 = {(1, 0), (0, 1)} ar en bas for planet. Justdenna bas kallas for standardbasen for planet. Pa samma satt bildar vektorupp-sattningen S3 = {(1, 0, 0), (0, 1, 0), (0, 0, 1)} standardbasen for R3.
Nu ar det emellertid sa att det finns manga baser sa vi ska lara oss mer omvad en bas ar och hur man kan avgora om en vektoruppsattning ar en bas ellerinte.
Definitionen fokuserar pa tva egenskaper som vi kan se hos ovanstaende stan-dardbaser. Dels sa kan alla vektorer i rummet skrivas som en linjarkombinationav basvektorerna men basvektorerna maste vara oberoende av varandra, ingenav de ingaende vektorerna ska kunna fas genom att kombinera de ovriga. Visammanfattar detta formellt i foljande
Definition 1.1.1. En uppsattning vektorer B = {b1, . . . ,bn} i ett vektorrumV kallas for en bas om foljande galler:
i.) b1, . . . ,bn ar linjart oberoende , dvs ekvationen
t1b1 + · · ·+ tnbn = 0 (1.1)
ska endast har den triviala losningen t1 = t2 = · · · = tn = 0
c© Mikael Forsberg 2010

2 Komplettering i linjar algebra
ii.) Alla vektorer v ∈ V kan skrivas som linjarkombination av vektorernab1, . . . ,bn, dvs det finns tal a1, . . . , an (kallade koordinaterna for vek-torn v med avseende pa basen B) sadana att
v = a1b1 + . . . anbn, (1.2)
d.v.s. b1, . . . ,bn spanner upp vektorrummet V .
Kommentar 1.1.2. Om en mangd vektorer inte ar linjart oberoende sa sagerman att de ar linjart beroende . Linjart beroende betyder alltsa att syste-met (1.1), som formuleras nedan i ekvation (1.3), har andra losningar an dentriviala losningen. Man kan ocksa formulera detta som att en av vektorerna kanuttryckas med hjalp av de ovriga, vilket fortydligar att vektorerna ar beroendeav varandra.
Kommentar 1.1.3. Om vi tittar pa ekvation (1.1) sa kan denna skrivas som enhomogen matrisekvation
Bt = 0, (1.3)
dar B ar matrisen som har vektorerna bi, i = 1, . . . , n som kolonner och t arkolonnmatrisen (t1, . . . , tn)T ( observera transponatet ).Denna skrivning ger oss mojlighet att tolka det linjara oberoendet for nagraolika fall.
1. Om vektorerna bi ar m-dimensionella med m < n sa ar B en m × nmatris med farre rader an kolonner. Detta innebar att systemet (1.3) arunderbestamt och alltid har andra losningar an den triviala. I detta fall(m < n) sa kan B inte bli en bas.
fler vektorer an rumsdimensionen kan aldrig bilda en bas eftersom de alltidar linjart beroende
2. Om m > n sa ar systemet (1.3) overbestamt , dvs vi har fler ekvationer anobekanta. Det ar da mojligt att systemet bara har den triviala losningenvilket betyder att Vektorerna bi bildar en bas for ett delrum till V , dvsen delmangd av V som ar ett vektorrum i sig.
Man kan saga att om vektorerna ar linjart oberoende sa bildar de en basfor det rum de spanner upp.
Exempel 1.1.5 visar en sadan har situation.
3. Det tredje och sista fallet ar da m = n vilket innebar att matrisen B arkvadratisk. I detta fall sa kan villkoret for linjar oberoende oversattas medatt saga att matrisen B skall vara inverterbar vilket innebar att determi-nanten for B ska vara nollskild.
Exempel 1.1.4. Om vi tittar pa foljande mangd som bestar av tre tvadimen-sionella vektorer B = {b1 = (1, 0),b2 = (0, 1),b3 = (a, b)} sa ar det direktuppenbart att detta inte blir en bas eftersom den tredje vektorn kan skrivas
c© Mikael Forsberg 2010

1.1 Om baser till vektorrum 3
som en linjarkombination av de tva forsta: (a, b) = a(1, 0)+ b(0, 1). Det ar dettasom alltid hander i situationen som beskrivs i punkt 1 i kommentaren ovan!Lat oss nu titta pa hur systemet (1.3) blir i detta fall[
10
]t1 +
[01
]t2 +
[ab
]t3 =
[00
]⇒
[1 0 a0 1 b
∣∣∣∣ 00
],
som ger losningarna (t1, t2) = −(a, b)t3 vilket ger manga losningar forutomden triviala losningen. De tre vektorerna ar alltsa inte linjart oberoende (utanlinjart beroende) och bildar alltsa inte en bas. Notera dock att de tre vektorernaspanner upp R2. For att vara en bas maste mangden innehalla sa fa vektorer sommojligt. Man kan visa att varje bas for samma vektorrum innehaller samma antalvektorer, det ar detta antal vektorer i en bas som vi kallar for vektorrummetsdimension.
Exempel 1.1.5. I detta exempel tittar vi pa vektormangden
C = {c1 = (1, 0, 0), c2 = (0, 1, 0)}.
Bildar denna mangd en bas for R3?Efter att ha last foregaende exempel sa vet vi att antalet vektorer i en bas arlika med rummets dimension. I vart fall kravs det alltsa tre vektorer och varmangd innehaller bara tva. Vi kan nu fraga oss om de tva vektorerna ar linjartoberoende och om de kan vara en bas for nagot tvadimensionellt rum (eftersomvi har tva vektorer). For att undersoka det linjara beroendet sa loser vi foljandeekvationssystem 1
00
t1 +
010
t2 =
000
⇒
1 00 10 0
∣∣∣∣∣∣000
Det foljer direkt att detta system endast losningarna t1 = t2 = 0 vilket saledesbevisar vektorernas linjara oberoende.Vilket rum ar C en bas for? For att vara en bas sa maste vektorerna spannaupp rummet sa om vi skriver upp en typisk linjarkombination sa kan vi kanskefa en ide: x(1, 0, 0) + y(0, 1, 0) = (x, y, 0) Det ser alltsa ut som vara vektorerspanner upp alla tredimensionella vektorer som har noll i sin tredje koordinat.Vara vektor spanner upp x− y planet som ar ett delrum av R3. (Ett delrum avR3 ar antingen en linje eller ett plan som gar genom origo.)
Exempel 1.1.6. Undersok vilken av mangdernaA = {(1, 1, 0), (0, 1, 1), (1, 0, 1)}och B = {(2, 1, 3), (1, 3, 1), (1,−2, 2)} som bildar en bas for R3. Vi anvander ossav punkt 3 i kommentar 1.1.3 som sager att vi har en bas om och bara ommatrisdeterminanten inte ar noll. Vi far
det
1 0 11 1 00 1 1
= 2
c© Mikael Forsberg 2010

4 Komplettering i linjar algebra
och
det
2 1 11 3 −23 1 2
= 0.
Detta innebar alltsa att endast mangden A ar en bas for R3!
Ovning 1.1. Visa att
b1 =[
12
], b2 =
[13
]bildar en bas for R2
Ovning 1.2. Undersok om
b1 =
121
, b2 =
122
, b3 =
123
bildar en bas for R3.
Ovning 1.3. Forklara varfor
B = {
101
,
011
,
110
,
111
}inte bildar en bas for R3. Pa vilket satt kan vi enklast gora om B till en bas?
1.1.1 Baser for radrum, kolonnrum och nollrum till enmatris
Radrummet Row(M) till en matris M ar det rum som spanns upp av matrisensrader, dvs
Row(M) = span( raderna till M)
Pa samma satt sa definierar vi kolonnrummet Col(M) som det rum som spannsav matrisens kolonner, dvs
Col(M) = span( kolonnerna till M)
Radrummet och kolonnrummet till en matris har samma dimension och dennadimension kallas matrisens rang, som vi betecknar med Rang(M) . Baser forrad och kolonnrummen kan beraknas mha Gausselimination pa satt som visas ifoljande exempel.
Nollrummet Noll(M) till en matris M ar losningarna till det homogenasystemet Mx = 0. Rangen, nollrummets dimension samt antalet kolonner n imatrisen ar kopplade via sambandet
Rang(M) + dimension for Noll(M) = n,
c© Mikael Forsberg 2010

1.1 Om baser till vektorrum 5
som ar ett viktigt resultat som kallas dimensionssatsen (rank theorem i Lay’sbok)
Exempel 1.1.7. Berakna baser for rad, kolonn och nollrummen till matrisen
M =
1 3 0 1
3 0 1 1
−4 6 −2 0
1 12 −1 3
Gausseliminering av M ger oss matrisen
M ′ =
1 3 0 1
0 −9 1 −2
0 0 0 0
0 0 0 0
De tva nollskilda raderna i matrisen M bildar en bas for radrummet.
For att fa fram en bas for kolonnrummet sa borjar vi med att identifiera ivilka kolonner som de ledande elementen star i. I var matris har vi att de ledandeelementen i M ′ star i kolonn 1 och 2. Nu gar vi tillbaka till ursprungsmatrisen1
M och valjer i denna kolonn 1 och 2, som da blir en bas for kolonnrummet tillvar matris.
Alltsa bas for radrummet:
{(1, 3, 0, 1), (0,−9, 1,−2)}
och bas for kolonnrummet blir
13−41
,
30612
1Observera att de tva forsta kolonnerna i M ′ inte ar en bas for kolonnrummet till M avenom de ar en bas for Col(M ′). Problemet ar att gausselimineringen, som ju involverar radope-rationer visserligen bevarar radrummet medan samma radoperationer forstor kolonnrummetsa att Col(M) 6= Col(M ′).
c© Mikael Forsberg 2010

6 Komplettering i linjar algebra
Fran dimensionssatsen vet vi att nollrummet maste vara tvadimensionelltoch vi ser ocksa att vi har tva fria variabler och detta ger att nollrummet faktisktar tvadimensionellt. En bas for nollrummet far vi genom att identifiera de friavariablerna2 z = 9s och u = 9t (om vi satter xT = (x, y, z, u)T i ekvationenMx = 0) Vi far da fran rad 2 i M ′ att y = 1
99s − 299t = s − 2t och fran rad
1 att x = −3y − u = −3s + 6t − 9t = −3s − 3t varfor vi far att losningen tillMx = 0, vilket ju ar nollrummet, ges av
xyzu
=
−3190
s +
−3−209
t
fran detta ar det uppenbart att
B =
−3190
,
−3−209
ar en bas for nollrummet.
1.1.2 Ortogonala och ortonormala baser
Standardbaserna i foregaende sektion har, forutom att de ar baser, aven andraviktiga egenskaper: for det forsta ar vektorerna omsesidigt ortogonala och fordet andra sa har varje vektor langden ett. Vi gor foljande definition:
Definition 1.1.8. n stycken vektorer o1, . . . ,on i Rn bildar en ortogonal basom vektorerna ar omsesidigt ortogonala, dvs om
oi • oj = 0, om i 6= j
Om alla vektorerna dessutom har langden ett sa sager vi har en ortonormalbas . En ortonormal bas brukar ofta kallas en ON bas .Detta kan uttryckas som
oi • oj = δij =
{0 om i 6= j
1 om i = j,
dar δij, definierad av den andra likheten, brukar kallas for Kroneckers 3 deltaEn mangd vektorer kallas for en ortonormal mangd om de ar omsesidigtortogonala och alla vektorer har langden 1.
2Att vi satter z = 9s och u = 9t ar bara for att slippa fa brak i basvektorerna3Kronecker, Leopold (1823-1891), tysk matematiker.
c© Mikael Forsberg 2010

1.1 Om baser till vektorrum 7
Exempel 1.1.9. Basen B = {b1 = (1, 1),b2 = (1,−1)} ar en ortogonal bas forR2 som inte ar ortonormal eftersom bada vektorerna har langden
√2. Det ar
latt att gora om B till en ON-bas genom att normera de ingaende vektorerna,dvs dividera vektorerna med deras langd. Detta betyder att
BON = {(1/√
2, 1/√
2), (1/√
2,−1/√
2)}
ar en ON-bas.
Definition 1.1.10. En kvadratisk matris ar en ortogonal matris om dess ko-lonner bildar en ortonormal mangd. (Observera att vi faktiskt sager att matrisenar ortogonal och inte ortonormal som man kanske borde)
Foljande sats pekar ut nagra av de viktigaste egenskaperna for en ortogonalmatris
Theorem 1.1.11. Foljande ar ekvivalent for en n× n-matris M
i. M ar ortogonal
ii. M ’s kollonner bildar en ON-bas for Rn
iii. M ’s rader bildar en ortonormal mangd.
iv. M ’s rader bildar en ON-bas for Rn
v. M−1 = M t
vi. M som linjar operator ar en isometri (se foljande sektioner)
Notera att punkt ii. och v. gor att vi far fram ett anvandbart test for attundersoka om en bas ar ortonormal eller inte. Observera att vi tack vare v. avenhar
Korollarium 1.1.12. Om M ar en ortogonal matris sa ar detM = ±1
Detta korolllarium gor att vi har ett test som avgor om en matris inte arortogonal. Om determinantens belopp inte ar ett sa ar matrisen inte ortogonal.Daremot finns det gott om matriser med determinant 1 som inte ar ortogonala:
Exempel 1.1.13. Matrisen
A =[
3 22 1
]har determinant 1 men ar ej en ortogonal matris eftersom kolonnerna inte ensar ortogonala och de har heller inte langden ett.
c© Mikael Forsberg 2010

8 Komplettering i linjar algebra
Exempel 1.1.14. Visa att B = {( 1√2, 1√
2, 0), ( 1√
2,− 1√
2, 0), (0, 0, 1)} ar en ON-
bas.Vi staller upp vektorerna som kolonner i en 3 × 3-matris och beraknar dessdeterminant:
det
1√2
1√2
01√2
− 1√2
00 0 1
= −1
Eftersom determinanten ar −1 sa sager satsen ovan att kolonnerna bildar ON-bas for R3.
1.2 Matrisen som avbildning
Vi borjar med en definition som visar hur matrier kan uppfattas som avbild-ningar. Det ar viktigt att forsta hur detta fungerar.
Definition 1.2.1. Lat A vara en m× n matris, dar vi paminner om att m arantal rader och n antalet kolonner i matrisen. Da definierar matrisen en linjaravbildning fran Rn till Rm genom
Rn 3 x 7→ Ax ∈ Rm,
dar produkten Ax ar definierad om vi betraktar den n-dimensionella vektornx som en n × 1-matris. Vi paminner om att en avbildning L(x) mellan tvavektorrum ar linjar om foljande galler for tva godtyckliga element x, y och tvagodtyckliga skalarer a och b i L’s definitionsmangd:
L(ax + by) = aL(x) + bL(y).
Orden avbildning ar en synonym med begreppet funktion.
Det ar viktigt att forsta att definitionen av matrisprodukten Ax ger en m×1matris som pa ett naturligt satt tolkas som en m-dimensionell vektor. Lat osstitta pa nagra exempel:
Exempel 1.2.2. Lat oss studera 1×3-matrisen A = (a, b, c). Enligt definitionenger denna matris en avbildning som gar fran R3 till R och som definieras av
R3 3 x =
xyz
→ (a, b, c)
xyz
= ax + by + cz
Den observante kanner troligen igen det sista uttrycket som skalarproduktenav vektorerna (a, b, c) och (x, y, z). Vi kan alltsa se pa skalarprodukten, somen radvektor i en matris multiplicerat med en kolonnvektor i en annan matris.Detta ar manga ganger en anvandbar insikt.
c© Mikael Forsberg 2010

1.2 Matrisen som avbildning 9
Exempel 1.2.3. Lat
A =
1 23 11 1
Da ar A en avbildning A : R2 → R3 och kan, om vi skriver x = (u, v) ∈ R2,skrivas
x = u + 2v
y = 3u + v
z = u + v
,
dar x, y och z ar variablenamnen i R3.
Lat oss nu titta lite pa geometriskt definierade linjara avbildningar och hurman gar tillvaga for att skriva dem pa matrisform. Principen ar att man ser huravbildningen avbildar standardbasvektorerna. De resulterande vektorerna stallsupp som kolonner i en matris och da har vi fatt den matris som avbildningensvarar mot. Lat oss illustrera detta i ett par exempel.
Exempel 1.2.4. Ett av de enklare exemplen att starta med ar den avbild-ning som speglar en tvadimensionell vektor i x-axeln. Denna avbildning kanformuleras som sa att y-koordinaten byter tecken:
S : R2 3 (x, y) 7→ (x,−y) ∈ R2.
Om vi nu kollar vad som hander med standardbasvektorerna: S((1, 0)) = (1, 0)och S((0, 1)) = (0,−1). De resulterande vektorerna stalls nu upp som kolonneri en matris:
AS =[
1 00 −1
]och vi kan verifiera att denna matris ger ratt avbildning:
AS(x, y)t =[
1 00 −1
] [xy
]=[
x−y
],
vilket ju ser alldeles ratt ut! Notera att determinanten blir −1 vilket ar kanne-tecknande for en spegling.
Exempel 1.2.5. Lat oss titta pa en linjar avbildning som definieras geometrisktgenom att alla vektorer roterar med centrum i origo en vinkel t. Situationen arsom i figur 1.1:
Fran figuren ser vi att standardbasvektorerna avbildas enligt
Rt((1, 0)) = (cos t, sin t), Rt((0, 1)) = (− sin t, cos t)
och da blir avbildningens matris
ARt=[
cos t − sin tsin t cos t
]c© Mikael Forsberg 2010

10 Komplettering i linjar algebra
t
t
cos t
cos t
sin t
- sin t
Figur 1.1: Figur till exempel 1.2.5
som ar en matris med determinanten +1 och detta ar nagot som karakteriseraralla rotationer.
Ovning 1.4. Berakna matrisen till den avbildning som geometriskt speglar allavektorer i y-axeln.
Ovning 1.5. Berakna matrisen for den avbildning som geometriskt ar speglingi y-axeln atfoljd av en rotation med π/3, dvs med 60◦.
Ovning 1.6. a. Betrakta linjen y = x. Hitta matrisen for den avbildning somgeometriskt ar speglinen i denna linje
b. Lat linjen y = 2x vara given. Hitta matrisen for den avbildning som geomet-riskt ar speglingen i denna linje. (kan vara knepig...)
c. Generalisera ovanstaende till spegling i en allman linje y = kx. (Detta ar enutmanande uppgift!!)
1.3 Linjara operatorer
Vi borjar med denna sektions huvudbegrepp.
Definition 1.3.1. En linjar avbildning fran Rn till Rn kallar vi for en linjaroperator
Exempel 1.3.2. En matris ger en operator om och bara om matrisen ar kvadra-tisk.
c© Mikael Forsberg 2010

1.3 Linjara operatorer 11
Det viktiga har ar alltsa att avbildningen avbildar element fran ett rumtillbaka till samma rum. Detta gor att vi kan direkt jamfora input med outputoch bilda oss t.ex. en uppfattning av vad avbildningen innebar geometriskt.
Exempel 1.3.3. Lat oss titta pa matrisen
S =(
1 00 −1
)som ger oss avbildningen(
xy
)7→(
1 00 −1
)(xy
)=(
x−y
),
dvs vi kan skriva S(x, y) = (x,−y) och fran detta ser vi att avbildningen bytertecken pa y-koordinaten, dvs ar en spegling i x-axeln. Vi kan notera att det S =−1 som ar kannetecknande for en spegling. En annan sak ar att ||S(x, y)|| =√
x2 + y2 = ||(x, y)|| vilket innebar att S inte forandrar vektorers langder (m.a.oavstand forandras inte genom denna avbildning). En operator som inte forandraravstand kallas for en isometri, vilket vi ska studera i nasta delavsnitt.
1.3.1 Isometrier
I exempel 1.3.3 sag vi det forsta exemplet pa en isometri. 4 Lat oss nu definierabegreppet ordentligt
Definition 1.3.4. En operator L : Rn → Rn ar en isometri om
||x|| = ||L(x)||
for alla x ∈ Rn.
Kommentar 1.3.5. Observera att vi i denna definition inte kraver att operatornar linjar. Det gar att visa (vilket ni kan se i separat dokument om isometri-er) varje isometri ar affin, dvs linjar sa nar pa en translation. Varje isometrikan ges som en ortogonal matris plus en translation, vilket har betydelse fortillampningar som tapetmonster och liknande. I det som foljer ska vi bara stu-dera de linjara isometrierna for att motivera punkt (vii.) i teorem 1.1.11.
Theorem 1.3.6. En linjar operator ar en isometri om och bara om dess tillhorandematris ar ortogonal.
Eftersom isometrier ar ortogonala matriser sa foljer det att deras determi-nant antingen ar +1 eller −1. De matriser som har positiv determinant kallasfor Rotationer och ar en jamn isometri. De som har negativ determinant arUdda isometri och geometriskt sa ar de speglingar.
4Isometri kommer av Grekiskans isos =lik, lika och metron = matt
c© Mikael Forsberg 2010

12 Komplettering i linjar algebra
Exempel 1.3.7. Man kan visa att en rotation med en vinkel α ges av foljandematris
Rα =[
cos α − sinαsinα cos α
]Man far att det Rα = cos2 α + sin2 α = 1
1.4 Egenvarden och egenvektorer
Nar vi har en linjar operator sa ar det naturligt att jamfora input med output.Man kan t.ex. se i fallet spegling i x-axeln, som vi studerade i exempel 1.2.4, attdet finns tva riktningar som inte forandras. Den mest uppenbara ar ju sjalvaspegellinjen (x-axeln) men ocksa y-axeln forandras inte (den vands bara uppoch ned). Sadana oforanderliga riktningar ar valdigt viktiga eftersom de sagermycket om avbildningens natur. Det visar sig ocksa att dessa riktningar faktisktkarakteriserar avbildningen vilket gor det fruktbart att studera detta. Foljandedefinition staller upp detta problem pa ett satt som kommer visa sig anvandbart:
Definition 1.4.1. Lat A vara en n× n matris vilket betyder att A ar matrisenfor en linjar operator fran Rn till sig sjalv. Nar vi soker en riktning xsom inteforandras sa soker man losning till systemet
Ax = λx, (1.4)
dar λ kallas for ett egenvarde och x for en egenvektor som hor till egenvardetλ.
Kommentar 1.4.2. Ekvation (1.4) betyder geometriskt att vi forvantar oss atten langden for vektorn x kan andras medan riktningen bibehalls. Ekvationenskrivs vanligen om pa foljande satt
0 = Ax− λx = Ax− λIx = (A− λI)x (1.5)
som alltsa ar ett homogent ekvationssystem. Det ar uppenbart att x = 0 aren losning men den kallar vi for den triviala losningen eftersom den integer nagon information alls om avbildninen. Vi ar i stallet intresserade av deicketriviala losningar som systemet har.
Proposition 1.4.3. Egenvardesproblemet i (1.5) har icketriviala losningar pre-cis da matrisen A − λI inte ar inverterbar, dvs precis da det(A − λI) = 0c(λ) = det(A−λI) blir ett polynom i variabeln λ som vi kallar for det karakte-ristiska polynomet och egenvardena ar tydligen nollstallen till detta polynom.
Lat oss nu forsoka losa ett enkelt egenvardesproblem:
Exempel 1.4.4. Hitta egenvarden och egenvektorer till matrisen
A =[−3 44 3
].
c© Mikael Forsberg 2010

1.4 Egenvarden och egenvektorer 13
Vi bestammer forst det karakteristiska polynomet:
c(λ) = det(A−λI) = det[−3− λ 4
4 3− λ
]= −(3+λ)(3−λ)− 16 = λ2− 25,
som har nollstallena λ = ±5, vilket alltsa ar vara egenvarden. For att beraknaegenvektorerna sa maste vi losa ekvationssystemet (A−λI)x = 0 for bada varaegenvarden. Det blir alltsa tva ekvationssystem att losa i detta fallet:
λ = 5: (A− 5I)x = 0 blir [−8 44 −2
∣∣∣∣ 00
]Gausseliminering ger [
2 −10 0
∣∣∣∣ [ 00
∣∣∣∣ ,som har losningen y = t godtycklig och x = t/2 och om vi skriver dettapa vektoriell parameterform far vi
Eλ=5 =(
12
)s,
dar vi satt 2s = t for att fa lite snyggare siffror. Eλ=5 kallar vi for egen-rummet till λ = 5. Egenrummet innehaller alla mojliga egenvektorer tilldet aktuella egenvardet. Vektorn
eλ=5 =(
12
)ar da en egenvektor som hor till egenvardet λ = 5
λ = −5: (A− (−5)I)x = 0 blir [2 44 8
∣∣∣∣ 00
]Gausseliminerar vi detta system far vi[
1 20 0
∣∣∣∣ 00
]som har losningarna, sammanfattade som ett egenrum
Eλ=−5 =(−21
)s,
och en naturlig egenvektor blir i detta fall:
eλ=−5 =(−21
)
c© Mikael Forsberg 2010

14 Komplettering i linjar algebra
Notera att de bada egenvektorerna ar ortogonala. Faktiskt ar det sa att allavektorer i det ena egenrummet ar ortogonala mot alla egenvektorer i det andraegenrummet. Man kan darfor saga att egenrummen ar ortogonala ortogonalaegenrum. Detta galler alltid om matrisen vi startade med ar symmetrisk, dvsom A = At
Ovning 1.7. Vad betyder matrisen A i exempel 1.4.4 geometriskt. Vad handert.ex. med standardbasvektorerna och forsok gora bilden fullstandig m.h.a. dessa.Glom inte bort att egenvektorerna pekar ut riktningar som inte forandras ochrepresenterar darfor symmetriegenskaper for avbildningen som A definierar.
Ovning 1.8. Berakna egenvarden, egenvektorer och egenrum for den symmet-riska matrisen [
−1 22 0
]Varning: detta ar en typisk situation dar egenvardena blir typiskt knepiga...Situationer med heltalsegenvarden ar ovanliga. Svar :
Ovning 1.9. Berakna egenvarden, egenvektorer och egenrum for den symmet-riska matrisen
A =
−1 2 0
2 0 2
0 2 1
Ovning 1.10. Berakna symmetririktningar for matrisavbildningen
A =[
1 73 5
]
1.4.1 Anvandningar av egenteorin
Vi har sett att egenvarden och egenvektorer ser ut att ha stor betydelse foren avbildnins egenskaper. Om tid ges sa avser jag att komplettera detta avsnittmed exempel pa hur man kan anvanda de symmetrier som egenvektorerna pekarut for att skriva om avbildningarna pa enklare satt. Egenvektorerna till sym-metriska matriserna kan beraknas sa att de bildar en ON bas. Genom att goraett koordinatbyte till denna bas sa kan avbildningen skrivas pa enklast mojligasatt. Ett satt att losa ovning 1.7 ar att utfora en sadan berakning.
Exempel 1.4.5. Betrakta situationen i exempel 1.4.4 och fragestallningen iovning 1.7. Om vi normerar egenvektorerna eλ=±5 sa far vi en ON-bas for R2.Staller vi upp dem som kolonner i en matris P sa blir denna matris ortogonalenligt sats 1.1.11. Vi har alltsa att
P =[
1/√
5 −2/√
52/√
5 1/√
5
]c© Mikael Forsberg 2010

1.4 Egenvarden och egenvektorer 15
och beraknar vi determinanten sa ser vi att denna ar +1 vilket gor att P geomet-riskt ar en rotation (byter jag plats pa egenvektorerna sa byter determinantentecken och vi far da i stallet en spegling). Nu gor jag ett basbyte, eller variabel-byte/substitution, med hjalp av denna matris P . En foljd av detta blir att jagmultiplicerar A med P−1 fran vanster och med P fran hoger och vi far (komihag att inversen till en ortogonal matris ar lika med transponatet):
P tAP =[
1/√
5 2/√
5−2/
√5 1/
√5
] [−3 44 3
] [1/√
5 −2/√
52/√
5 1/√
5
]=[
5 00 −5
].
Notera att denna manover gav oss en matris (som vi kallar for D ) med egenvardenapa diagonlen och nollor i ovrigt. Vi kan nu se att denna diagonala matris re-presenterar en spegling i y-axeln och en forstoring med en faktor 5 ty vi far attD(x, y)t = 5(−x, y).
Exempel 1.4.6. Losningarna till ekvationen
5x2 − 4xy + 8y2 − 36 = 0 (1.6)
ar geometriskt ellipsen i figur 1.2. Notera att ellipsen ar roterad i forhallande tillkoordinataxlarna. Det ar den blandade termen −4xy som ger upphov till detta.Vi ska se hur vi kan hitta nya variabler i vilka ellipsen ligger oroterad och med
y
4
4
2
2
−2
−4
0
x
5
5
3
1
3
0
−1
−3
1
−5
−1−2−3−4−5
Figur 1.2: Ellipsen som ges av ekvation (1.6), har atergiven med sina symmetri-axlar.
dessa variabler kommer ellipsens ekvation att sakna blandad term.Sa har gor man:
i. Vi skriver vanster led av (1.6) pa matrisform:
(x y
)( 5 −2−2 8
)(xy
)= 36 (1.7)
c© Mikael Forsberg 2010

16 Komplettering i linjar algebra
Genom att satta
x =(
xy
)sa kan vi skriva ekvation (1.7) som
xT Ax = 36 (1.8)
, dar
A =(
5 −2−2 8
)ii. Berakna egenvarden och egenvektorer till matrisen A. Egenvardena blir
λ1 = 4 och λ2 = 9 och motsvarande normerade egenvektorer blir eλ=4 =1√5(2, 1) och eλ=9 = 1√
5(−1, 2).
iii. Bilda den ortogonala matrisen P som har dessa egenvektorer som kolonner:
P =
(2√5
−1√5
1√5
2√5
)
iv. Utfor variabelbytet
x =(
xy
)= P
(XY
)= PX
som ger attxT Ax = XT PT APX = XT DX, (1.9)
, dar
PT AP = D =(
4 00 9
).
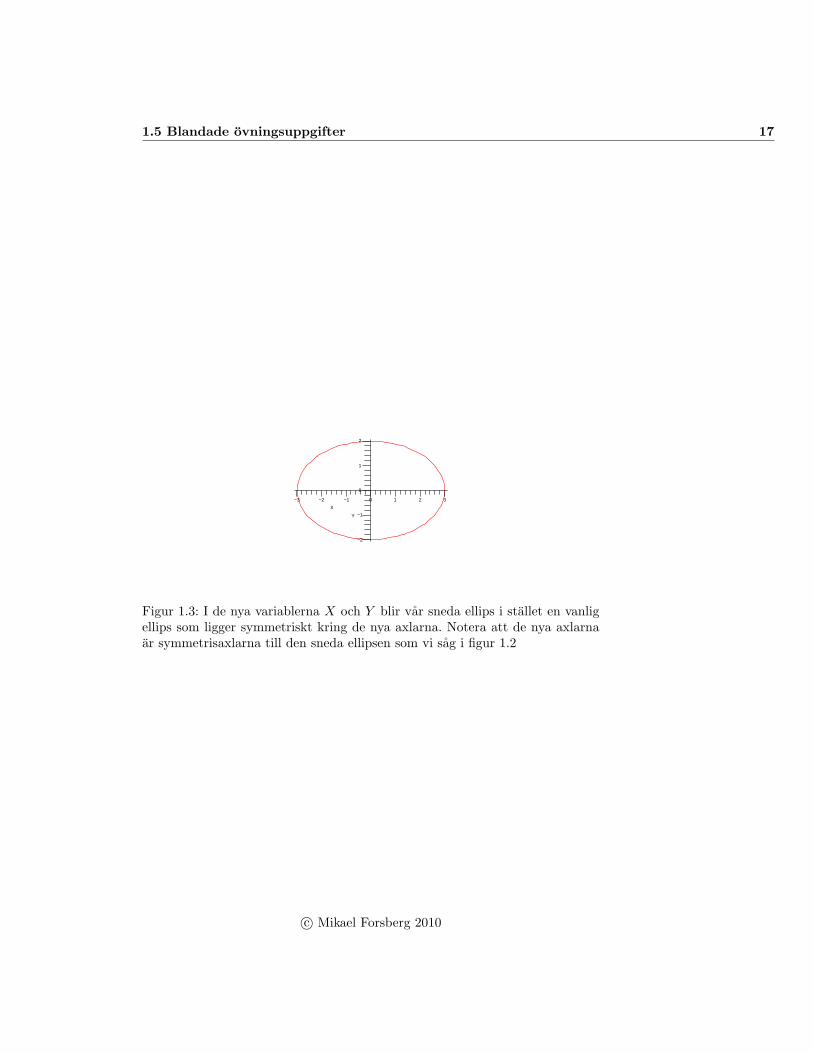
v. Nar vi raknar ut vad som star i (1.9) sa far vi att ekvationen 1.8 sa far viekvationen
4X2 + 9Y 2 = 36,
vilket illustreras i figur 1.3.
Ovning 1.11. Utfor berakningarna av egenvarden och egenvektorer till matri-sen A i exempel 1.4.6.
Ovning 1.12. Verifiera att matrisen P i exempel 1.4.6 ar en ortogonal matris.Ar matrisen en rotation eller en spegling?
1.5 Blandade ovningsuppgifter
Ovning 1.13.
c© Mikael Forsberg 2010
1.5 Blandade ovningsuppgifter 17
X
3210−1−2−3
Y
2
1
0
−1
−2
Figur 1.3: I de nya variablerna X och Y blir var sneda ellips i stallet en vanligellips som ligger symmetriskt kring de nya axlarna. Notera att de nya axlarnaar symmetrisaxlarna till den sneda ellipsen som vi sag i figur 1.2
c© Mikael Forsberg 2010


















