






Languages
Pages
Legal


Analog Correlator Spectrometer
Author: Chen Chen
Supervisors:Prof. Victor Krozer
Asst. Prof.Tom K. Johansen
Technical University of Denmark
A thesis submitted for the degree of
Master of Science
October 2006

Declaration
I declare that this thesis is my own work and effort and that it has not
been submitted anywhere for any award. Information derivedfrom the
published or unpublished work of others has been acknowledged in the
text and a list of references is given.

I would like to dedicate this thesis to my loving parents ...

Acknowledgements
I want to express my appreciation to my supervisor Victor Krozer for his
kind help and guidance in my thesis work.
And I also want to give my thanks to my friends Tang Meng, Marcoand
Boris for their support and encouragement through my thesisstudy.

Abstract
Recently for ultra broadband spectrometers for radio astronomy and chem-
ical recognition. In contrast to other techniques these offer very wide band
operation together with integration capabilities. However, there have been
little work presented around the efficiency of such correlators and their
frequency limitation.
In this thesis, different strategies for the implementation of analog correla-
tors spectrometer are investigated, it seems that bandwidth is a great chal-
lenge for the spectrometer design. Although acousto-optical spectrometer,
digital correlator and so on have some advantages listed in chapter one.
But considering the bandwidth limitation and based on thesediscussions,
analog correlator is chosen as the technology for an ultra wide-band spec-
trometer.
The most important and difficult part in analog correlator design is the
delay stages, active analog delay circuit are chosen to be implemented.
Based on the study of signal processing theory and HBT’s circuit model
in high frequency, It is found that the constant gain and delay time are the
challenges we may meet in the circuit design and some countermeasures
are discussed.
A Gilbert-core multiplier is adopted to realize the multiplication function
in the analog correlator circuit and it is introduced brieflyin Chapter 5.
The prototype circuit’s schematic and simulation result are presented at
last.

Contents
Nomenclature x
1 Introduction 1
1.1 General introduction . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Spectrometer types . . . . . . . . . . . . . . . . . . . . . . . . . . .2
1.2.1 Filter banks . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.2 Acousto-optical spectrometer(AOS) . . . . . . . . . . . . . .4
1.2.3 Correlator spectrometer . . . . . . . . . . . . . . . . . . . .5
1.2.4 Digital correlator . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.5 Analog correlator . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.6 Requirements and selection . . . . . . . . . . . . . . . . . .9
2 Analog Correlator Technology 11
2.1 Correlation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
2.1.1 Signal and Correlation . . . . . . . . . . . . . . . . . . . . .12
2.1.2 Fourier series and Fourier Transform . . . . . . . . . . . . .15
2.1.3 Power spectrum . . . . . . . . . . . . . . . . . . . . . . . . .19
2.2 Analog Correlator Circuit . . . . . . . . . . . . . . . . . . . . . . . .20
2.2.1 Spectrum’s bandwidth and resolution . . . . . . . . . . . . .20
2.3 Types of delay circuit and selection . . . . . . . . . . . . . . . . .. . 23
2.3.1 Specification . . . . . . . . . . . . . . . . . . . . . . . . . .23
2.3.2 Transmission line in WASP2 . . . . . . . . . . . . . . . . . .24
2.3.3 Delay lines using varactors . . . . . . . . . . . . . . . . . . .24
2.3.4 Distributed MEMS . . . . . . . . . . . . . . . . . . . . . . . 26
2.3.5 Active analog delay . . . . . . . . . . . . . . . . . . . . . . .28
v

CONTENTS
2.3.6 Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
3 Active analog delay circuit 31
3.1 Laplace domain expression of all pass function . . . . . . . .. . . . 31
3.1.1 All-pass filter . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.1.2 All-pass transfer function . . . . . . . . . . . . . . . . . . . .32
3.2 HBT and its circuit model . . . . . . . . . . . . . . . . . . . . . . . .33
3.2.1 Device introduction and structure . . . . . . . . . . . . . . .33
3.2.2 Device Operation . . . . . . . . . . . . . . . . . . . . . . . .34
3.2.3 HBT Modeling . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2.4 First order all-pass function realized by HBT . . . . . . .. . 41
3.2.5 Emitter degeneration resistance . . . . . . . . . . . . . . . .43
3.2.6 Miller effect . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4 Delay Stage Design Consideration 48
4.1 The gain of delay stage . . . . . . . . . . . . . . . . . . . . . . . . .48
4.1.1 DFT and Windows . . . . . . . . . . . . . . . . . . . . . . .48
4.1.2 Nonconstant gain . . . . . . . . . . . . . . . . . . . . . . . .53
4.1.3 Emitter follower . . . . . . . . . . . . . . . . . . . . . . . . 56
4.2 Nonconstant time delay . . . . . . . . . . . . . . . . . . . . . . . . .59
5 Multiplier 67
5.1 Multiplier’s function . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.2 Bipolar Differential pair . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.3 Gilbert cell multiplier . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6 Analog correlator schematics, simulation and Layout 74
6.1 Circuit Schematics . . . . . . . . . . . . . . . . . . . . . . . . . . .74
6.1.1 Active delay stage . . . . . . . . . . . . . . . . . . . . . . .74
6.1.2 Multiplier . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
6.1.3 Cascade stages . . . . . . . . . . . . . . . . . . . . . . . . .77
6.2 Simulation results and analyze . . . . . . . . . . . . . . . . . . . . .77
6.2.1 Multiplier . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
6.2.2 Active delay stages’ simulation and analyze . . . . . . . .. . 78
vi

CONTENTS
6.2.3 Time delay . . . . . . . . . . . . . . . . . . . . . . . . . . .80
6.2.4 Transient simulation . . . . . . . . . . . . . . . . . . . . . .81
6.2.5 Power Consumption . . . . . . . . . . . . . . . . . . . . . .82
6.3 Power spectrum recovery . . . . . . . . . . . . . . . . . . . . . . . .83
6.4 layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
7 Conclusions 89
A High frequency response of emitter follower 91
References 94
vii

List of Figures
1.1 Block diagram of a heterodyne spectrometer . . . . . . . . . . .. . . 1
1.2 Schematic view of Filter banks . . . . . . . . . . . . . . . . . . . . . 3
1.3 Schematic view of Acousto-optical spectrometer (Group(1996)) . . . 4
1.4 Schematic view of Digital correlator . . . . . . . . . . . . . . . .. . 7
1.5 Schematic view of a WASP analog lag correlator segment.(Harris &
Zmuidzinas(2001)) . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1 correlation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13
2.2 Correlation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17
2.3 Schematics of Analog correlator . . . . . . . . . . . . . . . . . . . .21
2.4 Delay lines using Ferroelectric varactor [Dan Kuylenstierna & Spar-
tak Gevorgian(Ericsson AB, Molndal, Sweden)]. . . . . . . . . . . . 26
2.5 Measured (0V[o], 20V[]) and modeled(0V[-], 20V[- -] results of time
delay.) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.6 Periodic structure representation of a DMTL (white: first metal, light
grey: second metal, dark grey: slots, black: anchoring)[Julien Perruisseau-
Carrier & Skrivervik(2006)]. . . . . . . . . . . . . . . . . . . . . . . 28
2.7 Measured and modeled absolute phase shift and differential delay of
the DMTL [Julien Perruisseau-Carrier & Skrivervik(2006)]. . . . . . 29
2.8 active analog delay stage and small signal model [Buckwalter & Ha-
jimiri (2000)] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.1 All-pass filter function . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.2 Cross-sectional view of a silicon-germanium heterojunction bipolar
transistor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
viii

LIST OF FIGURES
3.3 The four regions of operation of a bipolar transistor . . .. . . . . . . 36
3.4 The three circuit configurations of a bipolar transistor; (a) common
emitter; (b) common base; (c) common collector . . . . . . . . . . .. 38
3.5 HBT small signal model . . . . . . . . . . . . . . . . . . . . . . . .38
3.6 Common emitter circuit and its small signal model . . . . . .. . . . 42
3.7 A common emitter configuration with emitter resistance .. . . . . . . 43
3.8 Determining the high-frequency response of delay stage(a) equivalent
circuit (b) simplified equivalent . . . . . . . . . . . . . . . . . . . . 45
4.1 (a) infinite duration input signal; (b) rectangular window due to finite-
time sample interval; (c) product of rectangular window andinfinite-
duration input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.2 Rectangular function in time domain and Sinc function infrequency
domain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.3 Convolution in the frequency domain . . . . . . . . . . . . . . . . .. 52
4.4 autocorrelation of rectangular window . . . . . . . . . . . . . .. . . 54
4.5 (a): Rectangular window in time domain; (b) Triangle window in time
domain; (c) Triangle window in frequency domain. . . . . . . . . .. 55
4.6 Plot of gain vs delay stage number: in the top plot,gain= 1± 0.01; in
the bottom,gain= 1± 0.001 . . . . . . . . . . . . . . . . . . . . . . 56
4.7 Windows’ function envelope when gain pers tage= 1± 0.001 . . . . . 57
4.8 Windows’ function envelope when gain per stage= 1± 0.005 . . . . . 58
4.9 Window’ envelope curves according to various stage numbers . . . . 59
4.10 Equivalent circuit of input and output port . . . . . . . . . .. . . . . 60
4.11 (a)Emitter follower (b) High-frequency equivalent circuit . . . . . . . 61
4.12 An equivalent T model circuit of emitter follower . . . . .. . . . . . 62
4.13 (a) time delay vs frequency plot (b) phase shift vs frequency plot . . . 65
4.14 An example for frequency’s overlap . . . . . . . . . . . . . . . . .. 66
5.1 Differential Pair . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.2 Differential pair multiplier . . . . . . . . . . . . . . . . . . . . . . . 70
5.3 Gilbert Cell Multiplier . . . . . . . . . . . . . . . . . . . . . . . . . 73
6.1 Time delay stage’s schematics . . . . . . . . . . . . . . . . . . . . .75
ix

LIST OF FIGURES
6.2 Schematics of Gilbert core multiplier . . . . . . . . . . . . . . .. . . 76
6.3 Schematics of cascade stages . . . . . . . . . . . . . . . . . . . . . .77
6.4 The multiplication gain plot . . . . . . . . . . . . . . . . . . . . . . .78
6.5 Plots of input and output of one delay stage . . . . . . . . . . . .. . 79
6.6 Plot of gain for one stage and twenty stages . . . . . . . . . . . .. . 80
6.7 (a) Input impedance of common-emitter (b) output impedance of source
follower . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6.8 (a) Phase shift plot (b) Time delay plot . . . . . . . . . . . . . . .. . 82
6.9 Voltage swing in transient simulation . . . . . . . . . . . . . . .. . . 83
6.10 (a)Window’s function in time domain, (b)Window’s function in fre-
quency domain, (c)Zoom out of main lobe . . . . . . . . . . . . . . .84
6.11 The simulation plots of example . . . . . . . . . . . . . . . . . . . .85
6.12 One stage’s layout . . . . . . . . . . . . . . . . . . . . . . . . . . . .87
6.13 Colorful version of layout . . . . . . . . . . . . . . . . . . . . . . . .88
x

Chapter 1
Introduction
1.1 General introduction
A spectrometer is an instrument used to measure the spectrumof a signal, which
is often utilized astronomy and some branches of chemistry to analysis and identify
materials.
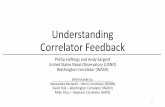
In a heterodyne receiver, as shown in figure(1.1) the RF-signal is down-converted
to IF-signal in a low frequency and amplified it. Further analysis of the IF-signal is
done in a spectrometer. It is common to call the receiver the frond end and the spec-
trometer the back end. A coherent receiver system usually consists of a local oscillator
(LO), which produces a monochromatic signal at frequencyvLO; a ”mixer”, which is a
nonlinear device that down-converts the signal collected by the telescope at frequency
RF Signal
Telescope
LNA AMP
and fliter
MixerRF
LO
Local
Osillator
IF AMPIF system and
backend spectrometers
Figure 1.1: Block diagram of a heterodyne spectrometer
1

1.2 Spectrometer types
vRF to a lower microwave frequencyvIF = |vRF − vLO|, known as the intermediate fre-
quency (IF); a series of IF amplifiers; and finally a ”backend”spectrometer which
produces a spectrum of the IF signal. This IF spectrum is a replica of the spectrum of
the telescope signal.
1.2 Spectrometer types
A wide variety of technologies are available for backend spectrometers, which can
be divided into two classes:
• those that measure spectra directly in the frequency domainsuch as
1 filter banks
2 acousto-optical spectrometer
• those that measure in the complementary time lag domain(lagcorrelators)
3 digital correlator spectrometer
4 analog correlator spectrometer
The major parameters of interest are bandwidth, spectral resolution, power dis-
sipation, and in some cases, cost. Digital correlators can provide very high spectral
resolution (smaller than 1MHz), can have bandwidths of 4GHz per unit, can have
numerous operating modes with varying resolutions and bandwidths, and are straight-
forward to mass-produce. This technology continues to advance rapidly, due to the
large investments being made by the semiconductor industry. However, the power dis-
sipation remains relatively high. Acousto-optic spectrometers (AOS), such as those
being developed for HIFI/Herschel, use substantially less power and can provide 1
MHz resolution with 4× 1 GHz bands in a single unit. This technology is relatively
mature, and only evolutionary improvements may be expected. Very wide contiguous
bandwidths (4GHz) with moderate spectral resolution ( 30MHz) can be provided with
analog correlators, which have relatively low power dissipation. It appears possible to
extend this technology to much wider bandwidths. In this thesis. a technique for ultra
wideband (10GHz) spectroscopy has been proposed.
2

1.2 Spectrometer types
IF input
Power
Splitter
Bandpass
filters
Detectors
A/D and Computer
Figure 1.2: Schematic view of Filter banks
In the following sections, these four types of spectrometerare briefly discussed and
their advantages and disadvantages are compared.
1.2.1 Filter banks
Filter banks is a type of classical spectrometer.It consists of a large number of fixed
width bandpass filters; their shape and bandwidth can be designed to any designed
form, therefore, filter banks can cover arbitrarily large bands, however, at the cost of
electrical and mechanical complexity.
A simple structure of filter bank spectrometer is shown in Figure (1.2), as we can
see, it is an array of band-pass filters that spans the entire frequency spectrum. A power
divider at the input splits the signal into several or many channels, each of which has a
separate bandpass filter and power detector.The single frequency detectors square the
input amplitude, so the output signal is proportional to thesignal intensity. The filters
can be constructed by using passive electrical components,but applying integrated
circuits is also feasible. Filter banks are working successfully at many ground base
observatories, like the IRAM1 30m telescope (2×1 GHzbandwidth,4MHz resolution),
1 http://iram.fr/IRAMES/telescope/telescopeSummary/telescopesummary.html
3

1.2 Spectrometer types
Figure 1.3: Schematic view of Acousto-optical spectrometer (Group(1996))
SMTO1 near Tucson, AZ or even on satellite missions, like the MLS2 instrument on
UARS3. However, a major drawback of this spectrometer is the enormous complexity
of the filter system if a bandwidth of severalGHzwith a fewMHz resolution is desired.
In addition, such instruments have large size and weight, and relatively high electrical
power consumption. The thermal stability of the filters and their calibration are typical
filter bank problems. Once the spectrometer has been constructed its resolution can not
be changed. Thus, for astronomy where requires a large number of frequency pixels,
filter banks are not an appropriate choice.
1.2.2 Acousto-optical spectrometer(AOS)
The principle of the acousto-optical signal processing is based on the diffraction
of light at an ultrasonic wave in an acousto-optical material(Uchida(1973)). A pieco-
electric transducer, driven by the RF-signal (from the receiver), generates an acoustic
wave in a crystal (the so called Bragg-cell). This acoustic wave modulates the refrac-
tive index and induces a phase grating. The Bragg-cell is illuminated by a collimated
laser beam. The angular dispersion of the diffracted light represents a true image of
1Submillimeter Telescope Observatory2Microwave Limb Sounder3Upper Atmosphere Research Satellite
4

1.2 Spectrometer types
the RF-spectrum according to the amplitude and wavelengthsof the acoustic waves
in the crystal. The spectrum is detected by using a single linear diode array (CCD),
which is placed in the focal plane of an imaging optics.The resulting analogue signal
of the CCD is read out and digitally converted in the electronics unit. This processing
is shown generally in figure(1.3)
The bandwidth of the instrument depends on the material constants of the deflec-
tor, but it varies typically between 40MHz and 3GHz. The achievable resolution of
an AOS lies between 30 KHz and a few MHz depending on the bandwidth and the
number of resolvable spots(usually around 1000) in the cell. The fabrication of hybrid
deflectors makes it possible to build very compact hybrid spectrometers that can be
used either for array receiver systems providing 4× 1 GHzbandwidth.
AOSs represent a unique option if relatively high resolution(tens ofKHz) is re-
quired, and the compactness of the spectrometers and the small price of channels
(compare with the filter bans)is also another advantage of AOSs. The disadvantages of
standard AOSs are their mechanical and temperature instabilities and the nonlinearity
of the spectra.
1.2.3 Correlator spectrometer
By using Fourier transform, signals can be converted from time domain to fre-
quency domain and vice versa. Correlator spectrometers(orautocorrelator) measure
the correlation of the input signal with itself as a functionof time offset(also called
time lag):
Rxx(τ) = limT→∞
12T
T∫
−T
x(t + τ)x(t) (1.1)
where Rxx is the signal’s autocorrelation as a function of time delayτ. x(t)and x(t + τ) are
respectively the reference signal and delayed signal.
with DFT(Discrete Fourier Transform),the autocorrelation is transformed to power
spectrumSv
Sxx( f ) =
∞∫
−∞
Rxx(τ)e− j2π f τdτ (1.2)
where Sxx is the power spectrum as a function of frequency f.
5

1.2 Spectrometer types
The DFT step can be handled in computer by using FFT(fast fourier transform).
This is very brief theoretical foundation of the autocorrelator spectrometer, more
details is presented in Chapter 2.
1.2.4 Digital correlator
The most common correlator architecture is digital. The astronomical signal,x(t)
is analog and this has to be transformed into digital form. This can be done with great
accuracy, or transforming the input voltage into a 1 bit stream, i.e. ones and zeros. If
the signal is bandlimited, which means its power spectrum isnon zero only within a
finite band of frequencies, no information is lost if the sampling rate is high enough.
According to the sampling theorem no information is lost as long as the time between
samples is less than1/∆ f , where∆ f is the observed band width. The critical sampling
frequency, 2∆ f , is called the Nyquist rate.
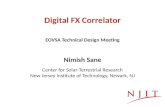
Figure(1.4) is a schematic diagram of a simple two-level digital autocorrelator. A
fast digitizer at the input of the system converts the input signal to a small digital word;
all subsequent processing is done in digital logic. This digital signal feeds to a series
of multipliers both directly (no time lag) and after a time delay produced in a shift
register. Logic multiplies these ”prompt” and delayed signals at each clock cycle, with
an accumulator summing the products. After a given integration time a computer reads
the digital words in the accumulator and Fourier transformsthe correlation function to
produce the spectrum.
Digital autocorrelator produces the autocorrelation function (ACF) of the signal
and then uses FFT to obtainSxx, the Power Spectral Density. The input IF signal is
first digitized after which the rest is done using digital techniques. This has the ad-
vantage that the spectrometer is extremely stable when compared with filter banks of
AOSs. It is also a flexible spectrometer as the spectral resolution can be easily changed.
With field programmable gate arrays (FPGA), digital hardware packages whose inter-
nal configurations can be downloaded from software, allow flexible correlators made
with high performance general purpose logic packages.
Because of its ease of fabrication, excellent control of spectral channel frequencies
and shapes, digital correlators become the technology of choice for observations with
thousands narrowband channels over moderate bandwidths. In theory, the resolution
6

1.2 Spectrometer types
τ
τ
τ
x(t)
bandpass
filtersampling
lock
shift lock
shift registercount clock counter multiplexer
R(nτ)
Figure 1.4: Schematic view of Digital correlator
could be infinite high because the resolution is proportional with the data sequence’s
length of the correlation, which depends on the number of delay shifter the number of
delay shifter. However, if the power consumption and compactness are taken into con-
sideration, normally the digital correlator’s resolutionis from severalMHz to hundreds
of MHz. The Relatively narrowband correlators1 are part of the instrument comple-
ment on ODIN and Herschel (L.Ravera & G.Serra(1998)). The disadvantage of digital
correlation is the same as its strength: much of the processing is purely digital. Proper
sampling of the signal requires digitization at a frequencyat least twice the signal’s in-
put bandwidth. The fastest digitizers currently availablehave sample rates of approx-
imately 4 gigasamples per second, limiting individual correlators to approximately 2
GHz bandwidths. Power consumption for digital systems scales as
P = V •C • f (1.3)
where where V is the bias voltage, C is the device capacitance, and f is the operating frequency.
1It is able to analyze four bands of 175MHzeach with a two bit three level digitizer clecked at 400
MHz.
7

1.2 Spectrometer types
Figure 1.5: Schematic view of a WASP analog lag correlator segment.(Harris &
Zmuidzinas(2001))
The equation(1.3) shows the relationship between power consumption and fre-
quency: the higher the clock frequencies, the higher the power. A common com-
promise, three-level digitization, gives 81% of the signal-to-noise compared with an
undigitized signal, or a loss of nearly one third of the observing time(Harris(2001)).
1.2.5 Analog correlator
Analog correlators’ configuration is not as flexible as digital correlators, but in the
case where low power consumption, wide bandwidth(higher than 4GHz) and moderate
resolution are required, analog correlator performs better because it hasmore advan-
tages than digital ones such as high efficiency and moderate spectral resolution across
very wide bandwidths.
The structure of analog correlators is more or less the same as digital correlators, as
8

1.2 Spectrometer types
shown in figure(2.3)1, it is a schematic diagram of a WASP2 analog lag correlator for
spectroscopy. Fast transistor circuits provide the multiplication components, which are
also called mixer, and the time delays are provided by short sections of transmission
lines (actually, we can use active circuits of some other technologies to get a better
performance of the whole correlator circuit).
So by using analog correlators with meticulous design and adequate devices, it is
possible to make a spectrometer with bandwidth, low power consumption and com-
pacted structure.
1.2.6 Requirements and selection
Comparison:
Type\Characteristic Bandwidth Power Compaction Resolution
Filter bank Arbitrary Large Massive Arbitrary
Acousto-optical(LiNbO3-AOS) ≈ 1× 4 GHz Low Compacted ≈ 1MHz
Digital correlator 4 GHz moderate Compacted ≈ 1MHz
Analog correlator(WASP2) ≈ 4 GHz,could be wider Lower than digital Compacted ≈ 33MHz
Requirements:
1. Bandwidth
The spectrometers, considered as backends for submm heterodyne receivers,
must deal with various technical and instrumental performance requirements.
The exploration at submm and far-infrared wavelengths creates a great demand
for spectrometers with large bandwidth. For instance, observations of Doppler-
broadened atomic or molecular transitions in galactic sources require a velocity
coverage of 600km/s, which corresponds to approximately 4GHz bandwidth at
2THz(Gal (2005)). Similarly, for pressure broadened line observations inthe
Earth or other planetary atmospheres, wider band spectrometers are indispens-
able. The goal of the spectrometer wanted in this thesis is around 10GHzand at
1This picture is taken from ref(Harris & Zmuidzinas(2001))2Wideband Lag Correlator for Heterodyne Spectroscopy of Broad Astronomical and Atmospheric
Spectral Lines.
9

1.2 Spectrometer types
present, only the analog correlator spectrometer is possible to be designed with
10 GHzbandwidth.
2. Frequency resolution
Of course, the higher resolution, the better. For the correlator spectrometer,
the higher resolution cost more complicated circuit, larger area occupation and
higher power consumption. Here, I don’t set a exact goal for the resolution,
because the resolution should be compromised with the physical properties such
as size, weight, mechanical stiffness, power consumption and reliability. But it is
realized that if neglecting the factor just mentioned, the correlator spectrometer
could be designed with resolution from several to hundredsMHz.
3. Physical properties
Although filter banks spectrometers have arbitrary bandwidth and resolution, but
compare with the other three types, but its massive compaction and high power
consumption are the main reasons for us to give it up. For the correlator spec-
trometer, their physical properties are closely relevant with their performance
such as bandwidth, resolution and so on, as well as the designand devices.
From the investigation of the several types of spectrometerabove, we can see that
bandwidth is a great challenge for the spectrometer design.Although acousto-optical
spectrometer and digital correlator have some advantages listed in the table but consid-
ering the bandwidth limitation, neither is the best choice for a wideband spectrometer.
Filter bank is the one that can cover arbitrary bandwidths, but worst physical proper-
ties . Therefor, the analog correlator is best choice here todesign the spectrometers
with low power consumption, compacted structure and wide band (from several to ten
GHz). Then we go in more details about analog correlator technology.
10

Chapter 2
Analog Correlator Technology
In this chapter, at beginning, the signal processing principles of correlator is pre-
sented. Since analog delay cell is the most important part inanalog correlator circuit,
which directly affects the analog correlator’s performance very much, several tech-
nologies of analog delay cell are discussed after the correlation theory and one of them
is selected as the one used in the analog correlator relevantto this report.
11

2.1 Correlation
2.1 Correlation
2.1.1 Signal and Correlation
A example is shown in figure(2.1)to illustrate the relationship with signal and cor-
relation. When the two signals are similar in shape and unshifted with respect to each
other, their product is all positive. This is like constructive interference, where the
peaks add and the troughs subtract to emphasise each other. The area under this curve
gives the value of the correlation function at point zero, and this is a large value.
As one signal is shifted with respect to the other, the signals go out of phase - the
peaks no longer coincide, so the product can have negative going parts. This is a bit
like destructive interference, where the troughs cancel the peaks. The area under this
curve gives the value of the correlation function at the value of the shift. The negative
going parts of the curve now cancel some of the positive goingparts, so the correlation
function is smaller.
The largest value of the correlation function shows when thetwo signals were
similar in shape and unshifted with respect to each other (or’in phase’). The breadth
of the correlation function - where it has significant value -shows for how long the
signals remain similar.
In one sentence, correlation is a maximum when two signals are similar in shape,
and are in phase (or ’unshifted’ with respect to each other)1.
Autocorrelation2 is a mathematical tool used frequently in signal processingfor
analyzing functions or series of values, such as time domainsignals. It is the cross-
correlation of a signal with itself. Autocorrelation is useful for finding repeating pat-
terns in a signal, such as determining the presence of a periodic signal which has been
buried under noise, or identifying the fundamental frequency of a signal which doesn’t
actually contain that frequency component, but implies it with many harmonic frequen-
cies. In statistics, the autocorrelation existent betweena real-valued random variable
is defined to be equal to the expected value of its product withitself at different time
point, it is,
Rxx(t1, t2) = E[X(t1)X(t2)] (2.1)
in the equation (2.1), E[] is the expected value, or the mean value and its function of
1The figure(2.1)and this example are taken from http://www.bores.com/index.htm2This definition is from Wikipedia, the free encyclopedia
12

2.1 Correlation
Figure 2.1: correlation
time is
E[X(t)] =
∞∫
−∞
x fX(x, t)dx (2.2)
where,fX() is the density function. With these two equations, the autocorrelation func-
tion can be rewritten as
Rxx(t1, t2) =
∞∫
−∞
∞∫
−∞
x1x2 fX1,X2(x1, x2; t1, t2)dx1dx2 (2.3)
When the autocorrelation functionRxx(t1, t2) of the random processX(t) varies only
with the time difference|t1 − t2| , and the meanmx is constant,X(t) is said to besta-
tionary in the wide-sense, or wide-sense stationary. In this case, the autocorrelation
function is written as a function of one argumentτ = t1 − t2 . If we let t2 = t and
t1 = t + τ, then the autocorrelation function, in terms ofτ only, is
RXX(t + τ, t) = RXX(τ) (2.4)
Those original definition is in often used in statistics, in signal processing, the
above definition is often used without the normalisation andthe signals are treated as
13

2.1 Correlation
ergodic1 ones. As mentioned in (Barkat(1991)), if a random processX(t) is ergodic in
the mean, there is
E[X(t)] = 〈x(t)〉 (2.5)
where the symbol〈 〉 donotes time-average and〈x(t)〉 is defined to be
〈x(t)〉 = limT→∞
12T=
T∫
−T
x(t)dt (2.6)
The continuous autocorrelationRxx(τ) is most often defined as the continuous cross-correlation
integral ofx(t) with itself, at lagτ.
RXX(τ) = limT→∞
12T
T∫
−T
x(t + τ)x(t)dt (2.7)
1A random processX(t) is ergodic in the mean if the time-averaged mean value of a sample function
x(t) is equal to the ensemble-averaged mean value function.
14

2.1 Correlation
2.1.2 Fourier series and Fourier Transform
Fourier series
The Fourier series is a mathematical tool used for analyzingan arbitrary periodic func-
tion by decomposing it into a weighted sum of much simpler sinusoidal component functions
sometimes referred to as normal Fourier modes, or simply modes for short. The weights, or
coefficients, of the modes, are a one-to-one mapping of the original function. The expression
is
f (t) =a0
2+
N∑
n=1
[an cos(ωnt) + bn sin(ωnt)] (2.8)
and it can also be rewritten as:
f (t) =a0
2+
N∑
n=1
[cn sin(ωnt + θn)] (2.9)
where:
• ωn is thenth harmonic(in radians)of the functionf
• cn =√
an2 + bn
2
• θn = arcsinancn
Besides periodic functions, Fourier series can also be usedto approximate non-periodic func-
tions by a linear combination of periodic functions. In practice, more and more harmonics are
added up until a shape sufficiently close to that of the original non-periodic functionis obtained.
That is
f (t) =a0
2+
∞∑
n=1
[cn sin(ωnt + θn)] (2.10)
where the only difference between Eq(2.10) and Eq(2.9) is when Fourier series express non-
periodic funtions,N → ∞.
Considering the autocorrelation process of a signal which is expressed with Fourier series,
f (x) =∞∑
n=1[cn sin(ωnt + θn)], a0 is neglected here because in electric signal this coefficient
denotes the weight of DC but the useful information is contained in AC signal.
Rf f (τ) = 〈 f (t) • f (t + τ)〉 (2.11)
if the item ”cn sin(ωnt + θn)” is replaced withCn(t) for simpleness, we can get
Rf f (τ) =
⟨ N∑
i=1
Ci(t)N∑
j=1
C j(t + τ)
⟩
=
⟨ N∑
i=1
N∑
j=1
Ci(t) •C j(t + τ)
⟩
(2.12)
15

2.1 Correlation
It is known that the time average ofCiC j(i , j) is zero1, so the correlation is able to be
expressed as the sum of the every single tune’s correlation:
Rf f (τ) =
⟨ N∑
n=1
RCnCn(τ)
⟩
(2.13)
This property can be illustrated by an example, suppose there is a signal combined with 3
tune:x1(t), x2(t) andx3(t), the frequency of which are respectivelyf1 = 4GHz, f2 = 6GHz, f3 =
8GHz
s(t) = x1(t) + x2(t) + x3(t) (2.14)
The figure(2.2) shows clearly that the autocorrelationRs(τ) of signal s(t) equals the sum
of Rx1(τ),Rx2(τ) andRx3(τ). And this property is able to be generalized in the case of signal
combined with arbitrary different frequency components. The correlation of a sine wave is also
a periodic sine signal as a function ofτ and its correlation’s amplitude equals the power of the
original sine wave,it can be expressed as an equation:
Rf1(τ) = 〈an sin(2π fnt) • an sin(2π fn(t + τ)〉
= a2n 〈sin(ωnt) • sin(ωnt + θ(τ))〉
= 12[a2
n(〈− cos(2ωnt + θ(τ))〉 + 〈cos(θ(τ))〉]
(2.15)
where
• ωn = 2π fnt.
• θ(τ) is a function of time delayτ.
• an is the weight of the sine with frequencyfn.
• the time average of a sine is zero, so〈− cos(2ωnt + θ(τ))〉 = 0.
• if τ is fixed, cos(θ(τ)) keeps constant with timet, so〈cos(θ(τ))〉 = cos(2π fnτ).
the final expression is
Rf1(τ) =12
a2n cos(2π fnτ) (2.16)
and it can be generalized as
Rs(τ) =N∑
n=1
Rfn(τ) =N∑
n=1
12
a2n cos(2π fnτ) (2.17)
1It is called orthogonality
16

2.1 Correlation
0 0.2 0.4 0.6 0.8 1
x 10−9
−1
0
1
0 0.2 0.4 0.6 0.8 1
x 10−9
−1
0
1
0 0.2 0.4 0.6 0.8 1
x 10−9
−1
0
1
0 0.2 0.4 0.6 0.8 1
x 10−9
−1
0
1
0 0.2 0.4 0.6 0.8 1
x 10−9
−1
0
1
0 0.2 0.4 0.6 0.8 1
x 10−9
−0.5
0
0.5
1
0 0.2 0.4 0.6 0.8 1
x 10−9
−5
0
5
0 0.2 0.4 0.6 0.8 1
x 10−9
−2
0
2
x1(t)
s(t)=x1(t)+x2(t)+x3(t)
x3(t)
x2(t)
Rx1
Rx3
Rx2
Rs=Rx1+Rx2+Rx3t tau
autocorrelation
Figure 2.2: Correlation
17

2.1 Correlation
Equation(2.16) shows that the coefficient 12a2
n is the power of the sine at frequencyf1.
Equation(2.17) coincides with Parsevals Theorem, which states that the total power in any
periodic signal may be found either by adding together the powers represented by the frequency
components in its Fourier Series, or as the mean-square value of its time domain waveform.
Fourier Transform
The continuous Fourier transformX( f ) defined as
X( f ) =
∞∫
−∞
x(t)e− j2π f tdt (2.18)
wherex(t) is some continuous time-domain signal
Equation(2.18) is used to transform an expression of a continuous time-domain function
x(t) into a continuous frequency-domain functionX( f ). By utilizing the property of orthogo-
nality, this equation can reveal the distribution of the Fourier series’ coefficients as a function
of frequency. Subsequent evaluation of the X(f) expressionenables us to determine the fre-
quency content of any practical signal of interest and opensup a wide array of signal analysis
and processing possibilities in the fields of engineering and physics.
18

2.1 Correlation
2.1.3 Power spectrum
Parsevals Theorem expresses a tie-up between the frequencydomain and the time-domain.
Power spectrum commonly defined as the Fourier transform of the autocorrelation function. In
the continuous and discretum, the power spectrum equation becomes:
S( f ) =
T∫
0
R(τ)e− j2π f τdτ (2.19)
S( f ) =N∑
n=1
R(n)e− j2πn f T s (2.20)
where,
• R(n) is the autocorrelation function.
• Ts is the sample interval.
Since the autocorrelation has odd symmetry, the time average of sine terms will be all zeros, so
that:
S( f ) =
T∫
0
R(τ) cos(2π fτ)dτ (2.21)
and
S( f ) =N∑
n=1
R(n)cos(2π fTTs) (2.22)
These equations in continuous and discrete are referred at the cosine transform. For the infinite
non-periodic signal,N andT could be infinite.
19

2.2 Analog Correlator Circuit
2.2 Analog Correlator Circuit
The theory of correlation and power spectrum is presented inthe foregoing discussion. In
this part, I’d like to describe the real analog circuit whichis used to realize the function of
correlator and power spectrum. A schematic representationof the analog correlator circuit’s
structure is shown in figure(2.3).
A measured signalx(t) is split into two channels by a power divider, one is used as the
reference signal without lag and the other is delayed as
x(τ), x(2τ), . . . , x(nτ), . . . , x(Nτ)
by time delay cells, where N is the number of delay cells. The products of the signals and
their lags are generated by multipliers and accumulators realize the time-averaged autocorrela-
tion function. The discrete autocorrelation values are collected and transformed to frequency
domain as the power spectrum by DFT (Discrete Fourier Transform). 1
This is the process of the analog autocorrelator circuit, which differs in a number of points
from the equations and theory outlined in the last subsection. The two main differences are:
1. the autocorrelator outputs are discrete data
2. the data set is finite
2.2.1 Spectrum’s bandwidth and resolution
These two differences cause two problems which are not referred in the continuous corre-
lation and signal processing.
The first point is taken care of by the Nyquist-shannon sampling theorem, which states that
if we sample with a rate twice the input bandwidth or higher, the sampled values contains all
the spectral information.
To formalize these concepts, letx(t) represent a continuous-time signal andX( f ) be the
continuous Fourier transform of that signal2 as in the equation(2.18).
The signal isx(t) is bandlimited to a one-sided baseband bandwidthB if X( f ) > 0 for all
| f | > B. Then the condition for reconstruction from samples at a uniform sampling ratefs is
fs > 2B.
1The discrete autocorrelation outputs may also be processedby using FFT(Fast Fourier Transform),
which is more popular because this algorithm is faster than DFT.2It exists if x(t) is square-integrable
20

2.2A
nalogC
orrelatorC
ircuit
g g g g
1( ) ( )x t x t 2( ) ( )x t x t
3( ) ( )x t x t ( ) ( )
ix t x t
( )x t
Po
we
r
div
ide
r
1( )R
1( )x t
( )x t
2( )x t 3( )x t ( )i
x t
2( )R 3( )R ( )i
R
1 2 3 i
t
ns
Integration variable
g
Delay cell
Integrator
Multiplier
Discrete
Continuous
1
1G g2
2G g
3
3G gi
iG g
g is the voltage gain per stage, Gi is
the voltage gain between the output of
ith stage and the original input signal
n sn
1
( ) ( ) cos(2 )n
j s
j
S f R f
( ) ( )n s
R R n
It is supposed here gain is constantunit, but if not, the output at ith stage
should be ( )i
ig x t
Fig
ure
2.3
:S
chem
aticso
fAn
alog
correlato
r
21

2.2 Analog Correlator Circuit
2B is called the Nyquist rate and is a property of the bandlimited signal, whilefs/2 is called
the Nyquist frequency. Sampling rate is inverse proportional to the sampling interval:
Ts =1fs
(2.23)
which is, in the analog correlator, one step’s time delay length τ. Therefor, the time delay
length of the delay stage is a factor that determines the bandwidth of the analog correlator. The
samples ofx(t) are denoted by:
x [n] = x(nτ), n ∈ Z (2.24)
The samples of autocorrelation are denoted by:
Rxx [n] = limT→∞
12T
T∫
−T
x(t)x(t + nτ)dt, n ∈ Z (2.25)
As we know that it is impossible for the integration time to beinfinite in the real circuit, but
for the signals which are around a couple ofGHzor higher, even one second integration time
is long enough. The error between the true time average and the one generated by accumulator
is so small that it can be neglected. After Discrete Fourier Transform, the power spectrum is
S( f ) =Ns∑
n=1
Rxx(n)cos(2π fTτs) (2.26)
whereNs is the number of the cells andτs is the sampling interval, equal to the time delay of
one delay cell.
The second point should be taken care of isNs – the number of the delay cells, which is a
finite number. The DFT frequency resolution is
fresolution=fs/Ns
(2.27)
Equation(2.27) illustrates that the spectrum’s resolution is determinedby samplings numberNs
if the sampling frequencyfs fixed.
Considering the discussion of bandwidth and resolution requirements in the first chaper,
the sampling frequency should be higher than 20GHz in case of an autocorrelator required
with 10GHz bandwidth. It limits the time delay length of one delay cell to be less than 50
picoseconds.
It is a common sense that the higher resolution, the better for a power spectrum which can
contain more information, so one delay cell’s time delay should be designed as long as possible
in the precondition of being less than 50 picoseconds.
22

2.3 Types of delay circuit and selection
Another method to improve the resolution is to increase the number of delay cells, but
this one should be taken care of, because it would bring some other troubles, such as power
consumption, compactness and circuit stability.
From the discussion above, it is realized that the delay cellis very important and it affects
the performance of the whole analog correlator circuit, so that a suitable one should be selected
seriously and designed carefully.
2.3 Types of delay circuit and selection
In this part, I list the specification of the delay cell at first, then several types of delay circuit
are introduced. At last, the most suitable one is selected.
2.3.1 Specification
Considering that hundreds or even thousands of delay cells will be compacted in a small
chip, so the size and power consumption of one single unit should be very small. The time
delay circuit used in our correlator circuit requires:
1. Ultra wideband. The goal is 10GHz, in another word, the delay time should be kept
constant in 10GHzbandwidth.
2. Low power consumption. It is reasonable that the total power for one analog correlator
is around several or several tens of Watt and therefore, for one delay cell, the power
consumption is around or lower than a couple of mW.
3. Small size. The length of one delay cell is expected aroundtens ofµm.
4. Moderate resolution, the delay time per unit is expected to being several tens picosec-
onds but less than 50 picoseconds. and the relationship between resolution and delay
time & the number of delay cells are presented in the table below:
Resolution 200 delay cells 500 delay cells 1000 delay cells
20 ps per cell = 250MHz = 100MHz = 50MHz
30 ps per cell ≈ 167MHz ≈ 67MHz ≈ 33MHz
40 ps per cell = 125MHz = 50MHz = 25MHz
Time delay can be realized through transmission lines, lumped LC delay lines, or active
devices. The normal transmission line implementations often require an excessive chip area, for
example, a single period delay is about one centimeter long at 10Gb/s. Lumped LC delay lines
23

2.3 Types of delay circuit and selection
are also area-inefficient because the high inductance values require a lot of area. Furthermore,
losses along both transmission lines and LC lines prevent cascading too many stages and high
power consumption is also a problem because of the low impedance of the lines.
In digital applications, delay is realized by reducing the bandwidth of a switching stage.
The subsequent switching of an unloaded stage restores the rise time of the digital waveform.
This approach is not useful in analog applications that are sensitive to signal distortion.
By using active analog delay, we can save a lot of area comparing with comparable LC
delay line, but considering about the there are hundreds or thousands of time delay units com-
pacted in a small chip, the power consumption is a challenge.
2.3.2 Transmission line in WASP2
The WASP2[Harris & Zmuidzinas(2001)] spectrometer, as presented in figure(2.3) on
page21, uses microstrip transmission line to generate the true time delays.
A series of resistive power dividers sample the signal of a traveling wave along the trans-
mission lines. Each sampling tap starts with a narrow (0.008in.) trace extending from the lines
edge to an 820Ω chip resistor, a direct current (dc) blocking capacitor, and then the multi-
plier input. Coupling to the multiplier is−24dB at low frequencies, with the resistors shunt
capacitance (about 0.05pF) increasing the coupling by a few decibels at the highest frequency.
This rollup is desirable, as it partially compensates for some of the multipliers rolloff with
frequency. A Nyquist cutoff frequency fc = 4200MHz was chosen to match commercially
available broadband splitters; the corresponding tap spacing is 59.5 ps, or 0.380 in. along mi-
crostrip transmission lines on 0.020 in. thickεr = 3.5 circuit board. The two transmission lines
start at opposite ends of the circuit board, running close tothe center along the long axis of the
board. The signal is fed into both these two transmission lines but opposite direction. Compar-
ing with the circuit structure where signals are fed into only one direction and correlated with
the reference ones, the opposite direction lag correlator doesn’t improve the resolution but it
may balance the signal’s loss. Even though there is loss along the transmission line, this circuit
structure makes the product of the signal and its lag from theother transmission line constant.
2.3.3 Delay lines using varactors
The varactor loaded transmission line technique is introduced in papers [Dan Kuylenstierna
& Spartak Gevorgian(2005,June)][Dan Kuylenstierna & Spartak Gevorgian(Ericsson AB,
Molndal, Sweden)], . We know that the simples possible true-time delay line is a dispersion-
24

2.3 Types of delay circuit and selection
free transmission line with a group delaytau:
τ =l
vg(2.28)
wherel is the physical length of the line andvg is the group velocity defined as:
vg =∂β
∂ω(2.29)
whereβ is the propagation constant of the line.
A tuneable true-time delay line may be accomplished as a slowwave structure, using tune-
able elements loading a non-dispersive transmission line.Far below the Bragg frequency (fB),
i.e. the frequency where the periodl between two consecutive loads equals half the guided wave
lengthλg, the group velocity is approximately equal to the phase velocity and the propagation
constantβ can he written
β = ω√
(Ll + L/l)(Cl +Cv/l) (2.30)
whereLl is the inductance per unit length,Cl the capacitance per unit length,L the lumped
inductance in the unit cell,Cv the capacitance of the varactor, andl the length of the unit cell.
An expression for the group delay is now obtained from equation(2.28), (2.29) and (2.30).
AssumingLl andCl to be neglected if comparing toL/l andCv/l respectively, the group delay
per unit cell can be written
τ =√
LCv (2.31)
whereL is the inductance per unit cell. Under the same assumption, the characteristic impedance
is simplified to
ZC =
√
LCv
(2.32)
Equation(2.31) and (2.32) shows the time delay and characteristic impedance whenf ≪
fB. This inequality gives the low frequency limitω → 0. In practical case, equation(2.31) and
(2.32) are approximately correct whenf < fB. As frequency increasing, the transmission line
structure reveals low-pass filtering performance so that the time delay is not constant.
The design of the delay line using varactors starts from equation(2.31) and (2.32). The
general idea of the delay lines using varactors is a planar transmission-line periodically loaded
with electronically variable capacitances (varactor diodes) which gives an electronically vari-
able phase-velocity along the line. In [Dan Kuylenstierna & Spartak Gevorgian(Ericsson AB,
Molndal, Sweden)], a compact tunable true-time delay lines base on ferroelectric1 varactor
integrated on high-resistivity silicon is introduced. Thedelay lines are based on lumped el-
ements, physically implemented as synthetic coplanar-strip lines. The physical length of the
1Ba0.25S r0.75TiO3
25

2.3 Types of delay circuit and selection
Figure 2.4: Delay lines using Ferroelectric varactor [Dan Kuylenstierna & Spar-
tak Gevorgian(Ericsson AB, Molndal, Sweden)].
fabricated delay lines is 2.0mm, including bias pads. At room temperature, this delay lines
generate an absolute group delay 70ps and the leakage current at room temperature is less than
0.1mA. The figure(2.4)1 below demonstrates this kind of delay lines:
There are 16 unit cells in figure(2.4),time delay is 5.4ps for one unit cell and about 120mm
long totally. The plot(2.5)shows that time delay can be kept nearly constant for ultra wideband.
As introduced in this paper, the power consumption is reallylow and the minimum delay
time is also small enough if only several unit cells are used as one delay unit. But the length is
a litter long if we want to use more than one thousand delay units to get high resolution.
With this technique, it is possible to design a correlator with about 200 delay units, the
bandwidth could be higher than 10GHz.
2.3.4 Distributed MEMS
Nowadays, MEMS2 technology develops very fast in the performance of electronically
tunable devices. In microwave and RF application, the MEMS-based periodic configurations
have emerged as an efficient way to implement true-time delay lines or phase shifts. In [Julien
Perruisseau-Carrier & Skrivervik(2006)], a modeling and design methods of true-time dis-
tributed microelectromechanical systems transmission lines (DMTLs), which can be used to
realize a variable true-time delay line, is presented.
1This figure is taken from [Dan Kuylenstierna & Spartak Gevorgian(Ericsson AB, Molndal, Swe-
den)].2Microelectromechanical systems
26

2.3 Types of delay circuit and selection
Figure 2.5: Measured (0V[o], 20V[]) and modeled(0V[-], 20V[- -] results of time
delay.)
Figure(2.6) shows the layout of a DMTL, which is a particular one-dimensional periodic
structure whose unit cell consists of a MEMS shunt capacitorloading a CPW. Such a periodic
device can be modeled by cascading identical two-port networks, each of those corresponding
to a unit cell of the structure.
Figure(2.7) depicts the measured and simulated delay results in terms of phase shift and
differential delay of the DMTL and the table below shows the parameters of the DMTL:
differential delay band number of cells total length
20ps 1− 20GHz 34 288µm
It is easy to calculated that for one cell, delay time of 0.588pscan be realized with length
of 8.47µm. Comparing with the delay lines with varactors mentioned formerly, the DMTL
is more compacted. If it’s used as a delay line in the analog correlator circuit with 100MHz
resolution,the time delay should be 10nsin total, which requires 17000 cells and 144mmlength.
This can not be called compactness. This weakness can be improved by feeding the signal
into two delay lines with opposite direction, therefor, thetotal length is halved, 77mmlong.
According to the characters of the DMTL, it is suitable to design a time delay circuit where
very broad band is required, but not a good one for the high resolution (smaller than 100MHz).
27

2.3 Types of delay circuit and selection
Figure 2.6: Periodic structure representation of a DMTL (white: first metal, light
grey: second metal, dark grey: slots, black: anchoring)[Julien Perruisseau-Carrier &
Skrivervik (2006)].
2.3.5 Active analog delay
Time delay can be generated by an active delay stage, which ismade up of the common-
emitter stage (differential pair) depicted in Figure(2.8). The differential pair works as a all-pass
filter, which keeps the gain unit and delays the input signal.As mentioned in [Buckwalter &
Hajimiri (2000)], the authors designed an active analog delay circuit based on this all-pass filter
circuit, which is depicted in Figure(2.8).
It is encouraging to see that the total area of a single 12.5psdelay stage is 0.0055mm2, one
sixteenth the area of a passive LC delay occupied. But, it is also mentioned in this paper ”the
delay path consumes 5mA at 3.3V per stage and has four stages to generate a 100ps delay. The
DRL1 (delay reference loop) consumes 15mA at 3.3V”, which means if thousands of this delay
units was integrated on a single small chip, the power consumption would be huge.
At present, the SiGe HBT technology is developing very fast and it can work with much
lower DC current comparing with the normal BJT made of Si. Besides the low operating DC
current, SiGe HBT can also work over a very broad frequency band, with carefully design,
the differential pair could perform very well that the gain and delaytime length are constant
enough. If so, the DRL may be not necessary. Therefor, the power consumption per delay stage
1DRL is used to compensate the PVT(process, voltage, and temperature) variation.
28

2.3 Types of delay circuit and selection
Figure 2.7: Measured and modeled absolute phase shift and differential delay of the
DMTL [ Julien Perruisseau-Carrier & Skrivervik(2006)].
will be decreased a lot and it can be the solution.
2.3.6 Selection
According to the discussion above, none of these analog delay circuit is perfect, but with
improvement, the active analog delay circuit would consumelower power. This kind of circuit
occupies small area and it is easy to be integrated on the chipso I choose this circuit as the time
delay cell.
29

2.3 Types of delay circuit and selection
B C
E
Figure 2.8: active analog delay stage and small signal model[Buckwalter & Hajimiri
(2000)]
30

Chapter 3
Active analog delay circuit
This chapter goes to details of the active analog delay circuit. There are several ways to
introduce an analog delay into a signal channel. My choice isto create the delay with active
circuitry, which doesnt take up much space and can be designed to precisely implement with
specified delay time is needed.
Theoretically, the active analog delay circuit works as a all-pass filter which is discussed
firstly, and then a introduction on HBT(heterojunction bipolar transistor) is given. Following
the HBT, The small-signal operation and model is expression. At last, design of the active
analog delay is considered.
3.1 Laplace domain expression of all pass function
3.1.1 All-pass filter
x(t) x(t − τ)
X( f )∠θin X( f )∠θout
H(s) = e−sτ
Figure 3.1: All-pass filter function
The magnitude response of an all-pass filter is unity for all frequencies, thus frquencies
are passed without attenuation. The associated phase response is useful for approximating a
31

3.1 Laplace domain expression of all pass function
specified phase characteristic. As to the analog correlator, constant time delay, corresponding
to a linear phase shift, is required.
3.1.2 All-pass transfer function
Laplace transform
Laplace transform is used as an analysis tool for time-invariant systems. It is also a mathemat-
ical operation defined for functionf (t) that are zero fort < 0 as:
F(s) =
∞∫
0
f (t)e−stdt (3.1)
where the complex frequency
s= σ + jω (3.2)
For an impulse functionf (t) = δ(t − τ) occurring att = τ, by using Laplace transform, it
gives:
F(s) =
∞∫
0
δ(t − τ)e−stdt = e−sτ (3.3)
In time domain, delay can be expressed as the function below:
x(t − τ) = x(t)δ(t − τ) (3.4)
From the equation (3.3) and (3.4), we can get the expression of time delay function in
Laplace domain is exponentiale−sτ, which requires an infinite number of poles and zeroes
to implement. Because the ideal form cant be implemented practically, we need to use an
approximation. An accurate, simple approximation to the ideal can be achieved by using a
technique known as Pade approximation. The first-order Pade approximation1 to an ideal delay
has the following form:
e−sτ =1− τs/21+ τs/2
(3.5)
As former discussion, the unit gain is required for every delay cell to realize the correlation
function, it is expressed as|e−sτ| = 1, henceσ = 0 ands= jω.
First-order approximation of AP transfer function
1Pade approximations are rational polynomial approximations toex, the details are introduced in
appendix
32

3.2 HBT and its circuit model
The first-order all-pass transfer function having one real pole at−τ/2 and one real zero at
+τ/2,is
H1(s) =1− τs/21+ τs/2
(τ > 0) (3.6)
The phase response of equation(3.5) is
θ1(ω) = −2 tan−1 ωτ
2(3.7)
The time delay function is:
D1(ω) =dθ1dω= −τ
1
1+ (ωτ2 )2(3.8)
It is obvious that the phase shift is not linear and time delaynot constant according to the
phase shift and time delay function given above because it isonly the first-order approximation
of the time delay channel function-esτ , but it is noticed that whenωτ ≪ 1 or ωτ → 0, the
equation(3.7)(3.8) can be approximated as
θ(ω) = −2 tan−1 ωτ
2≈ 2 •
ωτ
2= ωτ (3.9)
D1(ω) = −τ1
1+ (ωτ2 )2≈ −τ (3.10)
So in low frequency band, comparing with the delay circuits’sampling frequency which
is the inverse of the time delayτ, the first order function could be approximated as a constant
time delay system.
3.2 HBT and its circuit model
3.2.1 Device introduction and structure
SiGe1 HBTs2 are chosen as the transistors in the active analog delay circuit.
Figure(3.2) shows a cross-section of a typical SiGe heterojunction bipolar transistor[D.L. Harame
& Tice (1995)]. The p+ SiGe base layer is grown after oxide isolation formation andis fol-
lowed in the same growth step by the growth of a p-type Si cap. Single-crystal material is
formed where the silicon collector is exposed and polycrystalline material over the oxide iso-
lation. The boundary between these two types of material is shown by the dotted lines in
1Silicon-Germanium2Heterojunction Bipolar Transistors
33

3.2 HBT and its circuit model
Figure 3.2: Cross-sectional view of a silicon-germanium heterojunction bipolar tran-
sistor
Figure(3.2). The polycrystalline material is heavilyp+ doped using an extrinsic base implant
and then used to contact the base. The emitter is formed by diffusing arsenic from the polysil-
icon emitter to over-dope the Si cap n-type. SiGe HBT transistors behave very similarly to a
normal BJT, but has lower base resistancerb. Hence, the small-signal model of bipolar can
also be used for simulating the operation of SiGe HBTs.
Comparing with the normal Bipolar, HBTs offer dramatically improved high-frequency
performance compared to BJTs. Comparing with MOS transistors, SiGe HBTs have better
current driving capabilities which save the power. All these superior performance characteris-
tics make them most suitable devices to implement ultra wide-band analog correlator with low
power consumption.
3.2.2 Device Operation
Although implementation of HBTs is different with BJTs, the operation of HBTs is funda-
mentally the same as that of BJTs and the same models can be used to analyze them. In order
to use a bipolar transistor in practical circuits, externalbias must be applied to the emitter/base
and collector/base junctions. These two junctions provide four possible bias configurations, as
illustrated in Figure(3.3). The forward active mode of operation is the most useful, because in
34

3.2 HBT and its circuit model
this configuration the gain of the transistor can be exploited to produce current amplification.
A forward bias of approximately 0.7V is applied to the base/emitter junction and a reverse bias
to the collector/base junction.
The other bias configurations in Figure(3.3) are also often encountered in practical circuits.
In the inverse (or reverse) active mode, the emitter/base junction is reverse biased and the col-
lector/base forward biased. This is less useful than the forward active mode because the inverse
gain of the transistor is very low. In the cut-off mode both junctions are reverse biased, and
hence no current can flow between emitter and collector. The transistor is therefore off, and
behaves like an open switch. Conversely, in the saturation mode both junctions are forward bi-
ased, which enables a large current to flow between emitter and collector. In this configuration
the transistor can be viewed as a closed switch.
The electrical properties of a bipolar transistor can be characterized by a number of elec-
trical parameters, the most important of which is the commonemitter current gainβ which is
defined as the ratio of collector current-IC to base current-IB:
β =ICIB
(3.11)
In a typical transistor the collector current is approximately 40 ∼ 200 times larger than
the base current. In order to understand how this important property of the bipolar transistor
arises we must consider how it functions when external bias is applied. In the forward active
mode, the forward biasing of the emitter/base junction causes a large number of electrons to
be injected from the emitter into the base. A concentration gradient is therefore established
in the base, which encourages the electrons to diffuse towards the collector. If the base of
the transistor were very wide all the injected electrons would recombine before reaching the
collector, and the transistor would merely behave like two back-to-back diodes. However,
the essence of the bipolar transistor is that the base is sufficiently narrow that the majority of
electrons reach the collector/base junction, where they are swept across into the collector by the
large electric field across the reverse biased junction. This is achieved by making the basewidth
comparable with, or smaller than, the diffusion length of electrons in the base. The base current
is determined by the number of holes injected from the base into the emitter. The base current
can be made much smaller than the emitter current by doping the emitter much more heavily
than the base.
A related electrical parameter to the common emitter current gain is the common base
current gainα, which is the ratio of the collector current to the emitter current:
α =ICIE
(3.12)
The emitter current is given by the sum of the collector and base currents:
35

3.2 HBT and its circuit model
Forward Active
Reverse
bias
Forward
bias
Inverse Active
Forward
bias
Reverse
bias
Saturation
Foward
bias
Forward
bias
Cut-off
Reverse
bias
Reverse
bias
Figure 3.3: The four regions of operation of a bipolar transistor
36

3.2 HBT and its circuit model
IE = IC + IB (3.13)
Therefore the relationship betweenα andbetacan be expressed as:
α =β
1+ β(3.14)
The common emitter and common base current gains can be measured by biasing the tran-
sistor into the forward active region and taking readings ofbase, emitter and collector current.
Three alternative circuit configurations are possible, depending upon which terminal is com-
mon between the input and output. These are illustrated in Figure(3.4), and are termed the
common emitter, common base and common collector circuit configurations.
The common emitter current gainβ is obtained by connecting the transistor in the common
emitter configuration, as illustrated in Figure (3.4-a), and plotting the collector current as a
function of collector/ emitter voltage, with the base current as a parameter. The resulting
characteristic is illustrated as the equation:
IC = ICS expVBE
VT(3.15)
where
• VT = kT/q1 represents thermal voltage (normally 25mV at room temperature) and it has
been assumed thatVBE≪ kT/q.
• ICS represents saturation current or referred to as the collector current scale factor, which
is inversely proportional to the base width, emitter doping, junction area and so on.
Typically IS is in the range of 10−12A to 1015A(depending on the size of the device)
which depends on
The base current, which is is also dependent on base-emittervoltage, can also be expressed by
similar exponential relationship.
IB = IBS expVBE
VT(3.16)
whereIBS is base current scale factor.
The common emitter current gain is obtained by reading off the value of collector current
obtained for one of the values of base current and taking the ratio. The common base current
gainα can be measured by connecting the transistor in the common base configuration illus-
trated in Figure(3.4-b), and the collector current is a function of collector/base voltage, with
1k is Boltzmanns constant, q is charge on an electron and T is the temperature.
37

3.2 HBT and its circuit model
IC
IE
IB
VBE
VCE
(a)
IC
IE
IB
(c)
VBC
VEC
ICIE
VBE VCB
IB
(b)
Figure 3.4: The three circuit configurations of a bipolar transistor; (a) common emitter;
(b) common base; (c) common collector
the emitter current as a parameter. The common base current gain is obtained by reading off
the value of collector current obtained for one of the valuesof emitter current and taking the
ratio.
3.2.3 HBT Modeling
Hybrid-π small signal model is used here to describe the operation of forward-active model,
it is illustrated in figure(3.5).
B C
E
+
-
cpivπ rπ
Cµ
gmvπ r0
Figure 3.5: HBT small signal model
38

3.2 HBT and its circuit model
Small Signal Transconductance
This model is of a npn type device, the base-emitter voltageVBE controls the collector
current, the current generatorgmVbe, hereVπ = Vbe, models this behavior of the device with
transconductancegm, which is also defined as:
gm =∂IC∂VBE
=∂(ICS expVBE
VT)
∂VBE=
ICVT
(3.17)
As shown in equation(3.15), replaceVT with kT/q, we can get:
gm =qICkT
(3.18)
From the equation(3.18), it is apparent that if temperature T is fixed, the transconductance
is only determined byIC, so we can adjustgm by changing the collector current. The analysis
above suggests that for small signals (vbe≪ VT), the transistor behaves as a voltage-controlled
current source. The input port of this controlled source is between base and emitter, and the
output port is between collector and emitter.
The Base Current and the Input Resistance at the Base
To determine the resistance seen byvbe, firstly theib is given as a function ofvbe1 by using
equation(3.17):
ib =icβ=
gmvbe
β=
ICvbe
VTβ(3.19)
The small-signal input resistance between base and emitter, looking into the base, is de-
noted byrπ and is defined as
rπ =vbe
ib(3.20)
Using equation(3.19)gives:
rπ =β
gm(3.21)
Thusrπ is directly dependent onβ and is inversely proportional to the bias currentIC. Substitut-
ing for gm in Eq.(3.19) from Eq.(3.17) and replacingIC/βby IB gives an alternative expression
for rπ:
rπ =VT
IB(3.22)
1In this chapter,ib, vbe and other parameters with lowercase letters denote the small AC signal
39

3.2 HBT and its circuit model
Besides the input resistance looking into the base,rπ. The model obviously yieldsic =
gmvbe and ib = vbe/rπ. Not very obvious, however, is the fact that the equivalent model also
yields the correct expression ofib. This can be shown as follows:
ie =vbe
rπ+ gmvbe =
vbe
rπ(1+ gmrπ)
=vbe
rπ(1+ β) = vbe/(
rπ1+ β
)
=vbe
re
re is not shown in hybridπ model because theπ model is usually used for common-emitter
connection type, andre is just a equivalent resistance in this case. If using some other equivalent
small signal model, such as T model[Sedra/Smith(1998)], re exists there.
Early Effect and Output resistance
When connected in the common-emitter configuration, where the emitter serves as a common
terminal between the input and output ports and the collector voltage goes below that of the base
by more than 0.4V, that is a low values ofvCE, the collector-base junction becomes forward
biased and the transistor leaves the active mode and enters the saturation mode. One can find
the iC − vCE curve, though still straight lines, have finite slope. In fact, when extrapolated, the
characteristic lines meet at a point on the negativevCE axis, atvCE = −VA. The voltageVA, a
positive number, is a parameter for Bipolar Junction Transistor and it is calledEarly voltage.
The linear dependence ofiC on vCE can be accounted for by assuming thatIS remains
constant and including (1+ vCE/VA) in the equation(3.15) for iC as follows:
iC = ICS expVBE
VT(1+
vCE
VA) (3.23)
The nonzero slope of theiC − vCE straight lines indicates that the output resistance looking
into the collector is not infinite. Rather, it is finite and defined by
ro = [∂iC∂vCE
∣
∣
∣
∣
∣
vBE=const]−1 (3.24)
Using equation(3.23) we get that:
ro =VA + VCE
IC(3.25)
whereIC andVCE are the coordinates of the point at which the BJT is operatingon the
particulariC − vCE. Alternatively, we can write
40

3.2 HBT and its circuit model
ro =VA
I ′C(3.26)
whereI ′C is the value of the collector current with the Early effect neglected as shown in
equation(3.15)
Capacitance
The resistorrπ, though, dominates the input impedance at low frequency. Athigh frequency,
Cπ and the Miller effect1 caused byCmu dominate.
Cµ is due to the collector-base reverse biased diode capacitance. Cπ has two components,
due to the junction capacitance (forward-biased) and a diffusion capacitance:
Cπ = Cbe j+Cdi f f (3.27)
3.2.4 First order all-pass function realized by HBT
The all-pass function expressed as equation(3.6)can be synthesized using the common-
emitter stage (differential pair) depicted in Fig.(3.6). Normally, in low frequency band, the
various capacitances are neglected as open circuit, but with the frequency’s increasing the
impedancesC also rises, wheres = ω j. So in high frequency, the capacitanceCπ andCµshould be taken into consideration. This is illustrated in figure(3.6). A node equation at the
collector provides the small signal current thoughCµ between base and collector:
Iµ = sCµ(vπ − vout) (3.28)
and the currentIµ divides into emitter and the output resistor:
Iµ =vout
RC+ gmvπ (3.29)
after combination of equation (3.28) and (3.29), we can get
sCµ(vπ − vout) =vout
RC+ gmvπ (3.30)
which can be manipulated to the form:
1Miller effect describes the fact that the capacitanceCµ, between input and output of the transistor
when it is used as an amplifier, is multiplied by a factor of 1− Av, whereAv is the voltage gain of the
amplifier.
41

3.2 HBT and its circuit model
C
E
B
B C
E
+
-
V1
Vsig
RC
RC
VBB
Vin
Vout
iµ
Cµ
vπ cπrπgmvπ
ro
vinvout
Figure 3.6: Common emitter circuit and its small signal model
vout
vπ= −RCgm
1− sCµ/gm
1+ sCµRC(3.31)
By comparing this equation with the equation(3.6), it is found that they could be the same
if RC =1
gm. The time delayτ = 2CµRC.
In the analyze above, some parameters such asro, Cπ and so on are neglected.
This is because
• Note that we have not included the HBT output resistancero; including ro complicates
the analysis considerably. If the HBT is driven with very lowDC current(e.g. lower
than 1mA), according toro = VA/IC, the resistancero will be very large comparing with
theRC which is around hundredsOhm, hence, the effect ofro on circuit performance is
small andro could be seems as open circuit approximately. We shall not include it in the
analysis at present.
• Cπ is much more smaller thanCµ and for the first order approximated function, it could
be neglected.
• Assuming that the input impedance of next stage is much more lager thanRC, the input
impedance of next stage can also be neglected
The following two special cases which should be mentioned here are Emitter degeneration
resistance and Miller effect. They are very important because they could highly affect the
performance of the delay stage.
42

3.2 HBT and its circuit model
C
E
B
B C
E
+
-
V1
Vsig
RC
RC
VBB
Vin
Vout
iµ
Cµ
vπ cπrπ
gmvπro
re R′E
ie
RE
RE
vin
vout
Figure 3.7: A common emitter configuration with emitter resistance
3.2.5 Emitter degeneration resistance
It is a very common that a resistance is included in the signalpath between emitter and
ground, as shown in figure(3.7), can lead to significant changes in the circuit’s characteristics.
Analysis of the circuit in Fig(3.7) can be performed by replacing the HBT with its small-
signal model. To determine the relationship between base-emitter voltagevπ and inputvin, we
note that
vin = vπ + vE (3.32)
wherevE is the voltage atRE.
and by neglectingro which is treated as open circuit and the currentib throughrπ which is
ie/β (β is from a couple of tens to two hundreds), we get
vE = ie ∗ RE (3.33)
and
ie = gmvπ (3.34)
whereR′E denotes total resistance in the emitter which is the sum of the RE outside of the
transistor andre which is represented in equation(3.23), re =rπβ+1rπ and take equation(3.22)
43

3.2 HBT and its circuit model
into consideration, there can be expressed as
re =rπ
1+ β(3.35)
=VT
(1+ β)IB(3.36)
=VT
IE(3.37)
Normally, re is too small to be taken into consideration but when the transistor is driven
in very low emitter DC currentIE(e.g. around 0.1mAor lower), re could be comparable with
emitter resistorRE and output resistor (here, it is seemed asRC) therefore, it cannot be ne-
glected.
By combining equation(3.32)(3.33)(3.33), the relationship betweenvin andvπ can be ex-
pressed as
vin
vπ= 1+ gmRE (3.38)
According to equation(3.38) and small signal model, we can deduce that:
1. The equivalent transconductanceg′m could be expressed as
g′m =vin
ic(3.39)
=icvπ
vπvin
(3.40)
=gm
1+ gmRE(3.41)
2. The input resistance is increased by factor (1+ gmRE) because with the same current,
the input voltagevin is increased by factor (1+ gmRE) as shown in equation(3.38)
3. The voltage gain from base to collector,Av, is reduced by the factor (1+ gmRE)
4. The high-frequency response is significantly improved (as discussed later in Miller ef-
fect)
With the reduction of gain, the resistanceRE introduces negative feedback in the unit-gain
delay stage. If for some reason the collector current increases, the emitter current will also
increase, resulting in an increased voltage drop acrossRE. Thus the emitter voltage rises, and
the base-emitter voltage decreases. The latter effect causes the collector current to decrease,
counteracting the initially assumed change, an indicationof the presence of negative feedback.
44

3.2 HBT and its circuit model
If considering the emitter degeneration resistance, the transconductancegm in equation(3.31)
should be replaced with the new equivalent oneg′m as shown in equation(3.39), it results in:
vout
vin= −
RCgm
1+ gmR′E
1− sCµ(1+ gmR′E)/gm
1+ sCµRC(3.42)
3.2.6 Miller effect
B C
E
+
--
+
C
E
+
-
+
-
(a)
(b)
B1
B1
RCVsig
Rsig
V′sig
R′sig
Iµ
Iµ
Cµ
vπ
vπ
cπ
cπrπ
gmvπ
gmvπ
ro
R′L = ro//RL//RC
xµ
x′µ
Ceq
Cin = Cπ +Ceq = Cπ +Cµ(1+ gmR′L)
RL
R′L Vo
Vo
Figure 3.8: Determining the high-frequency response of delay stage (a) equivalent
circuit (b) simplified equivalent
The high-frequency equivalent small signal model is shown in fig()(a), which includes load
resistanceRL, collector resistanceRC and small signal source resistanceRsig. The equivalent
45

3.2 HBT and its circuit model
circuit in (a) can be simplified by utilizing Thevenin theorem at the input side and by combining
the three parallel resistances at the output side, as shown in (b) and we have:
V′sig = Vsigrπ
rπ + Rsig(3.43)
R′sig = Rsig//rπ (3.44)
R′L = ro//RC//RL (3.45)
The circuit can be simplified further if we can find a way to dealwith the bridging capaci-
tanceCmu that connects the output node to the input node,B. Toward that end consider first the
output node. It can be seen that the load current is (gmVπ− Iµ), wheregmVπ is the output current
of the transistor andIµ is the current supplied through the very small capacitanceCµ. To as-
sume thatIµ is still much smaller thangmVπ, with the result thatVo can be given approximately
by
Vo ≈ −gmVπR′L (3.46)
SinceVo = Vce, equation(3.46) indicates that the gain from B to C is−gmR′L and the current
Iµ can now be found from
Iµ = sCµ(vπ − vo) (3.47)
= sCµ[vπ − (−gmR′LVπ)] (3.48)
= sCµ(1+ gmR′L)Vπ (3.49)
Now, in figure()(b), the left-hand side of the circuit, atXX, knows of the existence ofCµonly through the currentIµ. Therefore we can replaceCµ by an equivalent capacitanceCeq
betweenB and ground as long asCeq draws a current equal toIµ. That is,
sCeqVπ = Iµ = sCµ(1+ gmR′L)Vπ (3.50)
which results in
Ceq = Cµ(1+ gmR′L) (3.51)
UsingCeq enables us to simplify the equivalent circuit at the input side to that shown in
Fig()(b), which we recognize as a single-time-constant (STC) network of the low-pass type.
Therefore we can expressVπ in terms ofV(sig)′ as
Vπ = V′sig1
1+ s/ω0(3.52)
46

3.2 HBT and its circuit model
whereω0 is the corner frequency of the STC network composed ofCin andRsig′.
ω0 =1
CinR′sig
(3.53)
whereCin is the total input capacitance atB,andR′sig is the effective source resistance
generated from equation(3.44).
Cin = Cπ +Ceq = Cπ +Cµ(1+ gmR′L) (3.54)
Combining the All-pass function shown of the delay stage in equation(3.31) give the volt-
age gain in the high-frequency band as
AV =VO
Vsig=
VO
Vπ
VπVsig
(3.55)
= −RCgm1− sCµ/gm
1+ sCµRC
11+ s/ω0
(3.56)
= −RCgm1− sCµ/gm
1+ sCµRC
11+ sCinR′sig
(3.57)
= −RCgm1− sCµ/gm
1+ sCµRC
11+ s[Cπ +Cµ(1+ gmR′L)](Rsig//rπ)
(3.58)
If there is a emitter resistance taken into consideration, we just need to replacegm with
g′m =gm
1+gmR′E, which is discussed in ”Emitter resistance degeneration”
We thus see that the high-frequency response will be a function of a low-pass STC network
with a 3-dB frequencyfH determined by the time constantCinR′sig. Since that our delay stages
gain must be constant and behave as a all-pass filter, the 3-dBfrequencyfH should be higher
than the 10GHzwhich is the up limit of bandwidth of the analog correlator discussed in this
thesis.
47

Chapter 4
Delay Stage Design Consideration
The design of delay stages should be treated very seriously because it is different with the
normal analog circuit that hundreds even thousands of delaystages will be used in the analog
correlator circuit. The difference results in the sensitivity of the analog correlator circuit that
a very small flaw, which might be neglected in a single delay stage, would be enlarged after
hundreds of stages so that the performance of the whole circuit will be influenced seriously.
In this chapter, I will present that what problems may be occurred in the delay stage and
how serious the influence would be. At the same time, some solutions to eliminate the problems
or to degrade the influence will be discussed at last.
4.1 The gain of delay stage
4.1.1 DFT and Windows
At beginning, Let’s compare with the theoretical foundation of autocorrelation spectrome-
ter outlined in chapter 2, the practical implementation differs in a number of points.
We can see that the main differences are:
First, autocorrelation data result is discrete in time. Theoutput of the each multiplier is an
autocorrelation sequence with different delay lengths:Rx(t+ τ), Rx(t+2τ), Rx(t+3τ),. . .Rx(t+
nτ).
Second, the data set is finite. As we know in the signal processing knowledge, the spectrum
resolution depends on the length of sampling sequences. It is one period length of the minimum
frequency signal we can distinguish in the spectrum. So the longer the sequences, the better
the resolution.
48

4.1 The gain of delay stage
The collected outputs of these finite discrete values are processed by using DFT (Discrete
Fourier Transform) and transformed in the frequency domainto form the power spectrum.
Time
Time
Time
(a)
(b)
(c)
Sample
interval
Rectangular window
Figure 4.1: (a) infinite duration input signal; (b) rectangular window due to finite-time
sample interval; (c) product of rectangular window and infinite-duration input
If we consider the infinite-duration time signal shown in figure (4.1)(a), a DFT can only be
performed over a finite-time sample interval like that shownin figure (4.1)(c). We can think of
the DFT input signal in figure (4.1)(c) as the product of an input signal existing for all time,
figure (4.1)(a), and the rectangular window whose magnitude is 1 over the sample interval
shown in figure (4.1)(b). Anytime we take the DFT of a finite-extent input sequence we are,
by default, multiplying that sequence by a window of all onesand effectively multiplying the
49

4.1 The gain of delay stage
input values outside that window by zeros.
-N/2+1 N/2
K
n
2N/K
Main
lobe
m
|X(m)|
x(n) ts
K*ts
N*ts
1/Nts = fs/N
fs Hz
0
-fs/2 Hz fs/2 Hz
Figure 4.2: Rectangular function in time domain and Sinc function in frequency do-
main
Rectangular window is a sinc function off if transform in frequency domain. A general
rectangular functionx(n) can be defined as N samples containing K unity-valued samples as
shown in Figure(4.2). The full N-point sequence,x(n), is the rectangular function that we
want to transform. We call this the general form of a rectangular function because the K unity
samples begin at a arbitrary index value Let’s take the DFT ofx(n) to get X(m) in frequency
domain. Usingmas our frequency-domain sample index, the expression for anN-point DFT is
X(m) =N/2∑
n=−(N/2)+1
x(n)e− j2πnm/N (4.1)
X(m) =sin(πmK/N)sin(πm/N)
(4.2)
WhenN is very large, sin(πm/N) can be approximated asπm/N, equation(4.2) can be expressed
alternately as:
50

4.1 The gain of delay stage
X(m) = N ·sin(πmK/N)πm
(4.3)
If we decide to relateX(m) to the time sample periodts which is the time delay per stage,
or the sample ratefs = 1/ts, then the frequency axis variable ism/Nts = m fs/N. So eachX(m)
sample is associated with a cyclic frequency ofm fs/N Hz. In this case, the resolution ofX(m)
is fs/N. But when analyzing the spectrum, it is normally to define thewidth of the main lobe
as the resolution, from figure(4.2), we can calculate the width of main lobe and it may written:
Wmainlobe=2NK
1Nts=
2Kts=
2 fsK
(4.4)
where,K is the window’s sampling sequence’s length,ts is the sampling interval andfs sam-
pling frequency, so the resolution of the spectrum is definedas 2 times sampling frequency
divided by sampling sequence length.
The DFT repetition period, or periodicity, isfs Hz, as shown in figure(4.2). If we substitute
the cyclic frequency variablem fs/N for the generic variable ofm/N in equation(4.1), we obtain
an expression for the DFT of a symmetrical rectangular function, whereK < N, in terms of the
sample ratefs in Hz. That expression is
X(m fs) ≃ Nsin(πm fsK/N)πm fs
(4.5)
The table below is given to convert between different representations of the DFT’s fre-
quency axis:
DFT Frequency X(m) frequency resolution Repetition Interval Frequency
Axis Representation variable of X(m) of X(m) Axis Range
Frequency in Hz m fs/N fs/N fs - fs/2to fs/2
Frequency in radians mωs/N ωs/N ωs -ωs/2toωs/2
As mentioned in [?,page 20], ”Multiplication in time domain is equivalent to convolution
in the frequency domain.” It can be expressed as equation below:
z(t) = x(t)w(t) (4.6)
Z( f ) =
∞∫
−∞
X(α)W( f − α)dα (4.7)
where x(t) and X(f) are signal function in time and frequencydomain, w(t) and W(f) win-
dow function in time and frequency. A Sketch of transform is shown in figure(4.3)
51

4.1 The gain of delay stage
t
t
t
f
f
f
T
T-T
1
1
- f0
T
(a)
(f)
(e)
(d)
(c)
(b)
x(t) = cos(2π f0t) X( f ) = δ( f + f0) + δ( f − f0)
w(t): window function in tome domain
z(t) = x(t)w(t)
f0
W( f ): window function in frequency domain
Z( f ) =∞∫
−∞
X(α)W( f − α)dα
1/T
Figure 4.3: Convolution in the frequency domain
52

4.1 The gain of delay stage
The pictures on the right-hand-side are the signals in time domain and their corresponding
signals in frequency domain are on the left-hand-side.
It should noted here the spectrum of autocorrelationRxx(τ) is the power spectrum of signal
x(t). After correlation, the window function is not rectangular but a triangle window which is
the autocorrelation of rectangular window function, as shown in figure(4.4).
It is obvious that in frequency domain, side lobes of triangle window is much smaller than
rectangular window and this characteristic will improve power spectrum’s performance.
4.1.2 Nonconstant gain
As the figure(2.3) shows, between every neighboring time delay stages, thereis a tap con-
nected to the multiplier. The ratio between the voltages’ magnitude of neighboring taps is
called delay stage gain in this thesis. It requires unit gainover 10GHz bandwidth, which means
the delay stage only delayed the signal but does not change the signal’s weight.
However, in practical active analog circuit, it is very difficult to generate the absolute con-
stant unit gain over the whole band. A tiny deviation from unit gain per stage will lead to a
large difference after many stages as shown in plot in figure(4.6)
In the top plot, deviation is±0.01, one percent change is nearly no influence for one single
delay stage but after n stages the gain between the output andoriginal signal is (1±deviation)n,
which is a geometric series and the rate of rise or drop is veryfast. A table is given below to
illustrate the total gain between the output at nth stage andthe original signal, with different
deviation:
Gain after 100 stages 200stages 500stags
gain=1+0.01 2.7048 7.3160 144.7728
gain=1-0.01 0.3660 0.1340 0.0066
gain=1+0.001 1.1051 1.2213 1.6483
gain=1-0.001 0.9048 0.8186 0.6064
From this table, we can conclude that for an analog correlator with a couple of hundreds
stages, the deviation of gain per stage should be smaller than 1%, otherwise, after hundreds of
stages, the voltage swing would become so large that the active circuit would be out of ”small
signal model” and the signal might be distorted.
Even the deviation of gain is lower than 0.1%, it may also lead to some problems:
• First is that the sampling window is not rectangular, hence the window function in fre-
quency domain will not be sinc function. Examples are shown in figure(4.7) and (4.8).
Assuming that there are 200 delay stages, the total gain is the voltage ratio between the
53

4.1 The gain of delay stage
t
t
t
t
t
t
t1 t2
t2
t1
0
T = t2 − t1
x(t)
x(t + τ)
τ = −T
tau< 0
τ = T
tau> 0
τ = 0
τ
t1 + τ
t2 + τ
R(τ)
whenτ < 0
whenτ ≥ 0
t2+τ∫
t1
dt = t2 − t1 + τ
t2∫
t1+τ
dt = t2 − t1 − τ
Figure 4.4: autocorrelation of rectangular window
54

4.1 The gain of delay stage
t
f
Rectangular Window
Triangle Window=correlation of Rectangular Window
Triangle Window in frequency domain
(a)
(b)
(c)
τ
x(t)
Rxx(τ)
∫
Rxx(t)e−2π f tdt
Figure 4.5: (a): Rectangular window in time domain; (b) Triangle window in time
domain; (c) Triangle window in frequency domain.
original input and output of nth stage, n is the stage number.From the window’s curve
in frequency domain, it is found that the main lobe’s peak’s difference is far more larger
than the deviation. For the gain’s deviation 0.001 and 0.005, the difference of the main
lobe’s peak are respectively 10% and 60% of unit gain. It is possible that, for a signal
with various frequency components which have different gain per stage, some frequency
components with smaller gain could be disturbed by frequency with larger gain.
• Second is that, when the gain is not unit, the window’s shape in frequency domain is
dependent on the number of delay stages or the sampling sequence length if the sam-
pling interval per stage is fixed. In figure(4.9), the plots are the window’s envelopes in
frequency domain of different delay stage numbers. The more stages, the higher peak of
main lobes and side lobes. For the gain 0,001, as shown in ploton the top, it is possible
to build a correlator with 500 delay stages even 1000. But forthe gain 1.005, it seems
2 hundreds is the maximum delay stages number, if with largerdelay stages number,
some frequency components would be covered by some others. the bottom plot, where
gain= 1.005,
In this part, a general sense of nonconstant gain effect is discussed, but not much details of
55

4.1 The gain of delay stage
0 50 100 150 200 250 300 350 400 450 500
1000
Stages sequence number
n
gain=1+0.01gain=1 - 0.01100
10
1
0.1
0.01
0.001
Gai
n
0 50 100 150 200 250 300 350 400 450 500
100.2
Stages sequence's number
100.1
100
10-0.1
10-0.2
Gai
n
gain= 1+ 0.001gain= 1− 0.001
Figure 4.6: Plot of gain vs delay stage number: in the top plot, gain= 1± 0.01; in the
bottom,gain= 1± 0.001
quantitative analyze because it is too difficult to analyze the effect without knowing requirement
of precision and time delay per stage in real circuit.
4.1.3 Emitter follower
To suppress the effect caused by the constant gain, the delay stages should be designed
very carefully with deviation as small as possible or with delay time length as long as possible
but not longer than 50 picosecond which is corresponding to the minimum sampling frequency
20GHz. The spectrum’s resolution is defined as the width of the mainlobe. As shown in
figure(4.2), the total sampling sequence length in time equals the product of sampling interval
and sampling number, thus for the fixed resolution, the longer the sampling time interval, the
less the delay stages needed and it would be safer.
56

4.1 The gain of delay stage
n
gain perstage=1.001
gain perstage=1
gain perstage=0.999
number of stages
red curve: gain=1.001
blue curve: gain=1
green curve:gain=0.999
(a) window envelope curve in time domain
(b) window envelope curve in time domain
m
0.2
0.4
0.6
0.8
1
1.2
-60 -40 -20 0 20 30 40
0
50 100 150 2000
0.9
1.0
1.1
1.2
0.8
1.3
Total Gain
Figure 4.7: Windows’ function envelope when gain pers tage= 1± 0.001
There are many reasons causing the nonconstant gain, such asprocess, voltage, and tem-
perature (PVT) variations. Miller effect is one of them. As illustrated in chapter 2, Miller
effect leads to a pole in the transfer function of delay stage. This effect can also be understood
alternately as an equivalent circuit shown in figure (??), the input impedance is dominated
by resistance in low frequency band, but by Miller capacitance in high frequency band which
means the input impedance is decreasing with frequency increasing.
According to equation(3.54), the pole at frequencyf = 12πCinR′sig
can be moved in higher
frequency band by adjusting the value ofCin andRsig. This can be realized by inserting an
emitter follower between neighboring delay stages.
A major advantage of the emitter follower is its excellent high-frequency response. This is
because none of the internal capacitances suffers from the Miller effect. Hence, its poles are
much more higher than common emitter circuit as expressed inAppendix A.
Figure(4.11) shows the high-frequency equivalent circuit of a emitter follower fed with a
signalVsig from a source having a resistanceRsig. It is biased by a constant current sourceI
which could offered by a current mirror. The resistanceRL at the output includes the output
resistance of current sourceI as well as any actual load resistance.
Reference to figure(4.11) reveals that the HBT has a resistancero ‖ RLin series with the
emitter resistancere. Thus application of the resistance reflection rule resultsin the equivalent
57

4.1 The gain of delay stage
n
gain perstage=1.005
gain perstage=1
gain perstage=0.995
number of stages
red curve: gain=1.005
blue curve: gain=1
green curve:gain=0.995
(a) window envelope curve in time domain
(b) window envelope curve in time domain
m
0 5 0 1 0 0 1 5 0 2 0 0 2 5 0 0
0 . 5
1
1 . 5
2
2 . 5
3
- 4 0 - 2 0 0 2 0 4 0 6 0
0
0 . 5
1
1 . 5
Total Gain
Figure 4.8: Windows’ function envelope when gain per stage= 1± 0.005
circuit shown in figure(4.11)(b). The current flow through this branch isie = βib, so multiply
all resistances in the emitter by (β + 1), the ratio ofie to ib. And the current flow throughrpi
andcpi is ib, is much more smaller thanie, thus the voltage drop will also be too small to be
counted, comparing with which on the emitter.
According to the analyze above and figure(4.11)(b), the input impedance at base,Rin is
Rin = 1/sCµ ‖ (β + 1)[re + (ro ‖ RL)] (4.8)
Considering the currentic and ib is much more larger thanib, rπ andCπ can be approxi-
mated as open circuit, thus the output resistance is
Rout = re ‖ ro (4.9)
The relation ship between output voltage and input voltage can be generated easily by using
”T” model equivalent circuit shown in figure(4.12), because the zero and poles are in very high
frequency band, so they are neglected in this equivalent model.
The overall voltage gainAV is:
AV =(β + 1)(ro ‖ RL)
Rsig + (β + 1)[re + (ro ‖ RL)](4.10)
58

4.2 Nonconstant time delay
- 4 0 - 3 0 - 2 0 - 1 0 0 1 0 2 0 3 0 4 0 5 0 0
0.5
1
1.5
- 5 0 - 4 0 - 3 0 - 2 0 - 1 0 0 1 0 2 0 3 0 4 0 0
5
1 0
1 5
2 0
2 5
(a) window function in frquency domain when gain when gain perstage =1.001
gain perstage=1.005
gain perstage=1.001
red curve: gain=1000stages
blue curve: gain=500stages
green curve:gain=200stages
red curve: =1000stages
blue curve: =500stages
green curve:=200stages
m
m
(b) window function in frquency domain when gain when gain perstage =1.005
Figure 4.9: Window’ envelope curves according to various stage numbers
We observe that the voltage gain is less than unity; however,for (β + 1)[re + (ro ‖ RL)] ≫
Rsig, it becomes very close to unity. Thus the voltage at the emitter follows very closely the
voltage at the input.
We can see that the emitter follower exhibits a high input resistance, a low output resistance,
a voltage gain that is smaller than but close to unity, and a relatively large current gain. Because
its small output resistance decreases the time constantCinRsig, the pole will move in the higher
frequency. It is very suitable to used as a buffer between two delay stages.
4.2 Nonconstant time delay
The transfer function of delay stage discussed in the chapter 2 is a first-order approximation
of all-pass function, which can be realized by an active analog circuit. However, in the practical
circuit, it is impossible to obtain the absolute constant time delay, thus the time delay will differ
with frequency more or less. In this part, a discussion of nonconstant time delay is given.
The discussion begins with signal processing theory. Assume there is a signal:
x(t) =n∑
i=1xi(t)
59

4.2 Nonconstant time delay
C
E
B
C
E
B
...
inputoutputinputoutput
... cinrin
rout
vout
Vin
Figure 4.10: Equivalent circuit of input and output port
wherexi(t) = Ai sin(ωi + θi) represents the component at frequencyfi = ωi/2π with ampli-
tudeAi.
We defineRi(τi) as the autocorrelation of frequency componentxi here andτi0 = D( fi) as
the time delay length per stage, which is a function of frequency.
If transformed to phase spectrum, the phase shift of sinusoid at frequencyfi per stage at is
P( fi) = −τi0 · fi = D( fi) · f (4.11)
For the constant time delay:
D( f ) = τ0, f ∈ (0, fup] (4.12)
where fup is 10GHz for the delay stage circuit discussed in this thesis.τ0 is the constant delay
time per stage. Thus,
P( f ) = −τ0 f (4.13)
which is a linear phase shift as shown in figure().
For the constant time delay, it is obvious that the sum ofRi is the autocorrelation ofx(t)(it
is mentioned in chapter 2):
Rxx(τ) =∑
Ri(τ) (4.14)
But for the nonconstant time delay, the delay time per stageτi0 = D( fi) differs with various
frequencies which means the traveling speed of sinusoids indelay stages are various. As to the
wave traveling equation:
v = f · λ (4.15)
60

4.2 Nonconstant time delay
C
E
B
E
CBB'
I
+
_
'
+
_
(a) (b)
VsigVsig
RsigRsig
VCC
RL
RL
VO
VO
Cµrπ
CπVπgmVπ
R′L = RL ‖ ro
Figure 4.11: (a)Emitter follower (b) High-frequency equivalent circuit
when wave speed is fixed, the frequency is only dependent on wavelengthλ, but if the speed in
the delay stages is various with frequencies, the sinusoids’s power spectrum, measured by the
active analog correlator, will shift from the real.
To analyze the effect of nonconstant delay, let’s set constant time delayτ0 and its power
spectrum as the reference and compare the difference of the power spectrum between the cases
of constant and nonconstant time delay.
In the case of nonconstant time delay, we define
Rxx(τ)′ = 〈x(t)x(t − D( f ))〉 (4.16)
where〈 〉 denotes the time average, which is used to replace integration for simplification,R′xx
is the sum of components’ autocorrelation.
the product ofx(t)x(t − D( f )) can be divided to two terms as:
∑
xi(t)∑
xi(t − τi) =∑
i, j
xi(t)x j(t − τ j) +∑
i= j
xi(t)x j(t − τ j) (4.17)
the first term’s time average is zero, because the sinusoids’orthogonality which is approved
as below:
⟨
xi(t)x j(t − τ j)⟩
=AiA j
2T
T∫
−T
sin(ωi t + θi) sin(ω j t + θ j + ω jτ j)dt = 0 (4.18)
because the integration variable ist so (θ j + ω jτ j) is a constant fort, thus, which can be replaced
by φ j .
61

4.2 Nonconstant time delay
E
C
B
Rin
Rout
+
_
Vout
Rsig
Vsig
αie
ro
re
RL
Figure 4.12: An equivalent T model circuit of emitter follower
T∫
−T
sin(ωi t + θi) sin(ω j t + φ j)dt =12
T∫
−T
cos((ωi − ω j)t + θi − φ j) + cos((ωi + ω j)t + θi + φ j)dt
(4.19)
If integration timeT is long enough, the sinusoid’s time average should be zero.
The second term in equation(4.17), can be processed as:
〈xi(t)xi(t − τi)〉 =A2
i
2T
T∫
−T
sin(ωi t + θi) sin(ωi t + θi + ωiτi)dt (4.20)
=A2
i
4T[
T∫
−T
cos(ωiτi)dt −
T∫
−T
sin(2ωi t + 2θi + ωiτi)dt] (4.21)
=A2
i
4T
T∫
−T
cos(ωiτi)dt (4.22)
=A2
i
2cos(ωiτi) (4.23)
Combining equation from(4.16) to (4.19), we can get
R′xx =∑
i
A2icos(ωiτi)
2(4.24)
62

4.2 Nonconstant time delay
if τi = τ0 is a constant, the functionR′xx becomes the autocorrelation functionRxx.
In the active analog correlator circuit, the axis ofτ is discrete and the sampling interval is
the time delay length per stage, hence, the discrete autocorrelation of frequencyfi is
Ri(nτi0), n = 1, 2, 3, . . .N (4.25)
wheren is the sampling sequence andN is the total sampling number. Thus, equation(4.24)
should be modified as a discrete one:
R′xx(n) =∑
i
A2i
2cos(ωinτi0), n = 1, 2, 3, · · ·N (4.26)
As expressed equation(2.20) , by using Discrete Fourier Transform to functionRxx(n)′, the
power spectrum can be generated as:
S′( f ) =N∑
n=1
∑
i
A2i
2cos(ωinτi0)e− j2π f nτ0 (4.27)
=∑
i
A2i
2
N∑
n=1
cos(ωinτi0)e− j2π f nτ0 (4.28)
(4.29)
the power at frequencyfi is
Si( f )′ =A2
i
2
N∑
n=1
cos(ωinτi0)e− j2π f nτ0 (4.30)
because time average of sine term is zero, so equation(4.27) can be simplified as:
Si( f )′ =A2
i
2
N∑
n=1
cos(ωinτi0) cos(2π f nτ0) (4.31)
where,f andτ0 are the reference variables in case of constant time delay. Let’s defineα( fi)
as:
α( fi) =τi0
τ0(4.32)
whereα( fi) is ratio between the nonconstant time delay per stage at frequency fi and ref-
erence constant time delay per stage.
According to orthogonality of cosine function, the productof cos(2π finτi0) and cos(2π f nτ0)
is nonzero only whenfinτi0 = f nτ0 or α( fi) fiτ0 = fτ0, thus
f = α( fi) fi (4.33)
63

4.2 Nonconstant time delay
and power weight at this frequency isA2i /4, where the weight at minus frequency is neglected.
From equation(4.32), if we take the case of constant time delay as the reference,the com-
ponent whose real frequency isfi will appear at frequency positionf ′i = α( fi) fi. It may disturb
the real frequency component atf ′i if its time delay per stage is the reference time delayτ0, or
α( f ′i ) = 1.
However, normally the functionα( f ) follows some law, for example:
α( f ) = a f + b
wherea > 0 andb are arbitrary real number.
Thus f ′i = a f2i + b fi which is nonlinear comparing the reference frequency axis,and the fre-
quency axis off ′ are extended or shorten comparing with reference frequencyaxis and there
is no overlap happened, because it is a monotonic function inthe right plane.
If we know the functionα( f ) and it is monotonic, the right power spectrum could be
recovered by changing the scale of reference frequency axisaccording to the functionf ′ = α( f )
The power spectrum recovery can be done with the phase spectrum plot. Combining equa-
tion (4.11) and (4.32)The phase function can be expressed in another way:
P′( f ) = −α( f )τ0 f (4.34)
Let’s have a look at the sketches shown in figure(4.13), The plot on the top side shows a
constant time delay curve and a nonconstant time delay curverising with frequency. If trans-
formed into phase-frequency plane, the slope of phase shiftid the time delay as shown on the
bottom plot. For a sinusoid at frequencyf2, we assume that the phase shift isθ1 for constant
time delay andθ2 for nonconstant time delay. While if the signal’s real time delay is noncon-
stant but it is processed in the case of constant time delay. The phase shiftθ2 will be considered
to occur at frequencyf3. On the reference frequency axis, the power weight off2 will appear
at f3, and power weight off1 will occupy the position off2. So if we want to obtain the right
spectrum, the scale of frequency axis should be adjusted asfrecovery. When the phase-frequency
is a monotonic or one-on-one mapping function, the relationship between andfrecovery is also
one-on-one, which avoids the spectrum’overlap - more than one frequencies’ power weight
at fre f erenceare shifted to a same position atfrecovery. An example of overlap phenomenon is
shown in figure(4.14) .
64

4.2 Nonconstant time delay
taueq
(a)constant delay
nonconstant delay
(b)
ffi
f1
f1
f2
f2 f3
τ
τ0
τi0
θ 1θ 2
θ
fre f erence
frecovery
Figure 4.13: (a) time delay vs frequency plot (b) phase shiftvs frequency plot
65

4.2 Nonconstant time delay
overlap
constant delay
nonconstant
ff1
f1f2
f2 f3
θ
Figure 4.14: An example for frequency’s overlap
66

Chapter 5
Multiplier
Multiplier is an analogue device used to multiply two signals together. In the active analog
autocorrelator circuit discussed in this thesis, the signal is delayed by using active delay stages
introduced in the last chapter, then the delayed signal is multiplied with the original one by
using a analog multiplier which is the topic of this chapter.After multiplication, the products
is integrated to get the time average. In this chapter, some fundamental concepts of multiplier
is introduced first. Following, the principle of gilbert-cell multiplier used in our active analog
correlator is illustrated.
5.1 Multiplier’s function
The function of a multiplier is just as its name implies, it multiplies two signals together.
Ideal multipliers satisfy the fundamental multiplicationexpression
z= (AO)xi x j (5.1)
where outputZ is the product of input signalsX andY, andAO, the multiplier gain constant.
Let’s specify that
xi = Ai sin(ωi t + θi) x j = A j sin(ω j t + θ j)
The resulting multiplied signal Z will be:
z= AOAiA j sin(ωit + θi) sin(ω j t + θ j) (5.2)
By using this trigonometry identity:
sinα · sinβ = −12
[cos(α + β) − cos(α − β)] (5.3)
if we let
67

5.2 Bipolar Differential pair
α→ (ωi + θi)
β→ (ω j + θ j)
then we have:
z=At
2[cos((ωi + ω j) + (θi + θ j)) − cos((ωi − ω j) + (θi − θ j))] (5.4)
if i , j, the outputz is the the sum of these two signal’s frequency sum and frequency differ-
ence. After integration, the time average ofzwill be zero.
else if i = j, the frequency of the difference term(second term) in equation(5.4) is zero,
which means the second term becomes a DC component. After integration, the first sum term,
frequency of which is 2ωi will be zero and the time average ofz is a DC value contributed by
the difference term.
Thus, if the input of multiplier is a practical signal with various frequency components,
in the output of multiplier, only the DC components generated by the same frequencies make
sense. Because, after integration, all the other AC components’ time average will be zero.
5.2 Bipolar Differential pair
Multiplying voltage or current waveforms is a nonlinear process. We can realize the func-
tion by feeding two signals to a nonlinear device. A large number of analog multipliers are
based on an exponential transfer function of bipolar transistors (BJTs). Actually, a differential
stage with coupled emitters may constitute an elementary multiplier cell capable of generating
(differential) collector output currents which are dependent ona differential voltage applied to
its inputs, (e.g., to the base terminals of a bipolar transistor pair forming the differential stage)
and the voltage which controls differential pair’s tail current.
To evaluate bipolar multiplication, the single differential pair of figure() is first evaluated.
The exponential I-V relation applied to each transistor canbe expressed as:
Ic = ICSeVbe/VT (5.5)
this equation is mentioned in chapter 2, whereIc is the collector current,ICS is the saturation
current,VT is the thermal voltage, andVbe is the base emitter voltage, which is:
Vbe= Vb0 ±v1(t)
2(5.6)
v1 is a small signal and the common DC componentVb0 is implied through the current bias.
It is adjusted automatically so the sum of the currents through the two transistors becomes the
bias current, i.e.
68

5.2 Bipolar Differential pair
Q1 Q2B1
B2
C1 C2
E1 E2
+
_
(a)
IET
I1e I2e
I1c = Ic0 + ∆IcI2c = Ic0 − ∆Ic
I1b = Ib0 + ∆Ib
I2b = Ib0 − ∆Ib
∆Ic
vb1
vb2
vbe1 vbe2v1
∆Ic =α f IES
2v1(t)2VT
Figure 5.1: Differential Pair
I1e = IESeVb0/VT ev1/VT I2e = IESeVb0/VT e−v1/VT (5.7)
The tail currentIET is the sum of the emitter current ofQ1 andQ2:
IET = I1e+ I2e = IES[eVb0/2VT + e−Vb0/2VT (5.8)
The differential output current is the deviation∆Ic from the bias currents, which is indicated
in figure(), a circulate through both transistor and the output load,
∆Ic =12
(I1c − I2c) (5.9)
=α f IES
2eVb0/VT [ev1/2VT − e−v1/2VT ] (5.10)
=α f IES
2[ev1(t)/2VT − e−v1(t)/2VT ]
[ev1(t)/2VT + e−v1(t)/2VT ](5.11)
=α f IES
2tan(
v1(t)2VT
) (5.12)
69

5.2 Bipolar Differential pair
C1 C2
B2B1Q1 Q2
E1 E2
_
+
Q3
IET
I1eI2e
I1c = Ic0 + ∆Ic I2c = Ic0 − ∆Ic
I1b = Ib0 + ∆Ib
I2b = Ib0 − ∆Ib
∆Ic
vb1
vb2
vbe1 vbe2
v1
v2
Figure 5.2: Differential pair multiplier
If the amplitude ofv1 is small, compared toVT, we can take the first, linear term in Taylor
series1 expansion for approximation:
tan(v1(t)2VT
) =v1(t)2VT
(5.13)
Thus the differential current∆Ic may be written:
∆Ic =α f IES
2v1(t)2VT
(5.14)
The currentIET is actually the bias current for the emitter-coupled pair. With the addition
of more circuitry, we can makeIET proportional to a second input signal. If the current source
at the tail of differential pair is replaced with a bipolar controlled by smallsignal voltagev2, it
can be expressed through:
IET = I0 + ∆I0,∆I0 = gmv2, gm =I0
VT,VT =
kTq≈ 26mV (5.15)
Here, appropriate bias resistor settings establish the DC current level,I0 . Inserting into the
expression for the differential pair, equation(5.14), the differential output current may now be
written:1Taylor series of tanx: tanx = x− 1
3 x3 + 215x5 − 17
315x7 + · · · , |x| < π2 .
70

5.3 Gilbert cell multiplier
∆Ic =α f IET
2tan(
v1(t)2VT
) (5.16)
=α f I0
2tan(
v1(t)2VT
) +α f I0
2VTv2 tan(
v1(t)2VT
) (5.17)
=α f I0
4v1(t) +
α f I0
4V2T
v1(t)v2(t) (5.18)
No multiplying is associated with the first term since it contains only one frequency com-
ponent. The second term holds the multiplication product. We assume that both the two small
signals are sinusoidal; if with different frequencies, result after integration is zero, if with same
frequencies, combing equation (5.4)and (5.18) the result may be written:
∆Ic,v1v2
∣
∣
∣
v1,v2≪VT=α f I0
8V2T
cosθ∆ (5.19)
where cosθ∆ is the phase difference of thev1 andv2 caused by delay stages. As discussed
in chapter4, the phase difference may be expressed:
θ∆ = 2π f nτ (5.20)
where f is the frequency,τ the time delay per stage andn the sequence number of stage.
Thus we have produced a circuit that functions as a multiplier under the assumption thatv1
is small
5.3 Gilbert cell multiplier
A diagram of the Gilbert cell architecture is shown in figure(??, it crosses coupling two
differential stage mixers that are current biased through a common DC tail current. Compared
with the single differential stage mixer in figure, also thev2 signal is now applied to a differ-
ential input port. As seen in the figure, there are three differentially operated transistor pairs in
this configuration, and to investigate the multiplication function, we shall make repeated use of
the differential stage results from section of differential pair.
The common tail current is here kept at a constant DC value,I0. The differential current in
the bottom transistor pair, which is driven byv1, becomes
∆I0 =α f I0
2tan(
v1
2VT) (5.21)
whereα f is the common base current gain of the transistors. Commonlyit has a value
slightly below one. Including the effect of the bottom differential current∆I0, the differential
and tail currents for the twov2 signal operated transistor pairs are expressed
71

5.3 Gilbert cell multiplier
∆IA =α f IA
2tan(
v2
2VT), IA =
α f I0
2+ ∆I0, (5.22)
∆IB =α f IB
2tan(
v2
2VT), IB =
α f I0
2− ∆I0, (5.23)
Finally, the two differential terms above subtracts to the final output differential current
∆Iout,∆Iout = ∆IA − ∆IB =
α f
2 [IA − IB] tan(
v22
)
=α f
2 ∆I0 tan(
v22
)
=α2
f I0
2 tan(
v22
)
tan(
v12
) (5.24)
By using the Taylor series expansions and assumptions from equation to approximate
∆Iout||v1|,|v2|≪VT=α2
f I0
8v1v2 (5.25)
Compared with the similar expressions from the single differential stage multiplier like
equation. it seems that only a product term remains, so the Gilbert Cell has clearly doubly
balanced multiplier function and it is sometimes called a pure four-quadrant multiplier.
If v1 andv2 share the same frequency, current amplitude of the difference term may be
written:
∆Iout|v1,v2≪VT=α f I0
16V2T
A1A2 cosθ∆ (5.26)
whereA1 A2 are the amplitude of the input signals,θ∆ the phase difference.
Practically, the Gilbert Cell could operate as a mixer, the main difference between Gilbert
Cell multiplier and mixer is that, LO input signal of mixer may not be small compared with
VT , thus the first linear term of Taylor series expansions will not be accurate enough for the
approximation and it may deteriorates linear performance by introducing distortion and inter-
modulation signal components at frequencies. However, forthe multiplier, the problem is not
as serious as the mixer process, because both of the signals are considered as small signals
which can be approximated by Taylor series and even though there are some unwanted fre-
quency sum or difference appears, it will be removed after integration if it isnot a DC signal.
However, the weight of DC part of the multiplication productmay be disturbed by signal’s
harmonic components, for example, ifnth order harmonic offi equalsmth order harmonic of
f j , then their difference which is DC signal is a unwanted weight included in theoutput.
72

5.3 Gilbert cell multiplier
Q1 Q2 Q3 Q4+
_
+
_
vout
Vcc
Vbb
v1
v2∆I0
∆IA ∆IB
I0
RLRL
IA = 1/2I0 + ∆I0 IB = 1/2I0 − ∆I0
IA1 = 1/2IA + ∆IAIA2 = 1/2IA − ∆IA
IB1 = 1/2IB + ∆IB
IB2 = 1/2IB − ∆IB
1/2IA + 1/2IB + ∆IA − ∆IB 1/2IA + 1/2IB − ∆IA + ∆IB
Iout = ∆IA − ∆IB
Figure 5.3: Gilbert Cell Multiplier
73

Chapter 6
Analog correlator schematics,
simulation and Layout
The analog correlator circuit is designed and simulated by using ADS (Advanced Design
System). The active analog delay stage and multiplier’s schematics and simulation results
is shown first in this chapter. Then the results will analyzedbe and suggestion of further
improvement are given at last.
6.1 Circuit Schematics
6.1.1 Active delay stage
The circuit schematic of active analog delay stage is shown in figure(6.1).
In this schematic,the common emitter differential pair on the left side is the core of delay
stage which operates as an all-pass filter. The input signal is delayed by this common emitter
differential pair.
The common collector(or emitter follower) differential pair in the middle works as a buffer
with high input resistance and low output resistance to keepthe gain constant over the whole
band. Recall the HBT’s high frequency response discussed inchapter 3, the input of the com-
mon emitter is capacitance caused by the equivalent capacitance between base and emitter,
which is contributed by theCπ and Miller effect capacitance. The low output resistance of the
emitter follower will make the time constantRC smaller, thus the pole may be moved higher
than 10GHz, out of the frequency band we are interested on.
The tail current is controlled by a current mirror on the right side to keep DC current
constant. And current mirrors are also used as the current sources which are connected with
74

6.1 Circuit Schematics
input
output
Figure 6.1: Time delay stage’s schematics
75

6.1 Circuit Schematics
v1
v2
transimpedance
amplifier
Gilbert core
output
Figure 6.2: Schematics of Gilbert core multiplier
the emitter follower differential pair as you can see in the figure(??).
6.1.2 Multiplier
I utilizes a structure of a SiGe HBT Mixer circuit described by [T.K.Johansen(2001)] to
build a multiplier circuit, which can be divided into 3 partsinput stage, Gilbert Core and output
stage as shown in figure(6.2).
Emitter follower is used as input stage, and its operation isthe same as former introduction.
The Gilbert Core is nearly the same as described in the last chapter, the only difference is
that the load is not resistance but a transimpedance amplifier buffer which converts current to
voltage and its equivalent resistance is so large that it canreplace very large real resistance
which is difficult to realize in MMIC circuit.
The output is the combination of the Emitter follower and a common-collector differential
76

6.2 Simulation results and analyze
pair which works as an amplifier.
All the current resource is realized by current mirror.
6.1.3 Cascade stages
delay cell
multiplier
Figure 6.3: Schematics of cascade stages
The chain of delay stages and multipliers configuration is set as figure(2.3) and schematics
of first several stages is given by the figure(6.3). The chain is combined with 40 cascade stages,
while in the practical circuit, this number should be largerthan a couple of hundreds.
6.2 Simulation results and analyze
6.2.1 Multiplier
Small signals with the same frequencies and amplitudes but different phases are used as
the inputs of the multiplier. Harmonic balance is always used as the simulation method to
simulated the analog multiplier. The sweep parameter is thesmall signal’s frequency from
1GHz to 10GHz by step of 1GHz. The convergence and Matrix solve type are set in ”Auto”
mode, status level is set 11 and fundamental oversample 2.
As discussed in last chapter, what we are interested is the frequency difference term, which
is the weight at 0 frequency for the signals share the same frequency.
Figure(6.4) shows the amplitude gain of the output voltage vs input voltages’ product from
1GHzto 10GHz, there is about 2.5dB lost at 10GHz, 2dB lost at 9GHz. The losemay be caused
by the up input buffer as shown in figure(6.2), one source follower connects with 2 transistors’
base, which means the input of the Gilbert core is half. At high frequency, the input impedance
of the Gilbert core, dominated by capacitance, maybe not large enough compared with the
77

6.2 Simulation results and analyze
1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.5
Gain (dB)
Figure 6.4: The multiplication gain plot
output resistance of source follower, thus, the output signal of source follower decreases with
frequency.
6.2.2 Active delay stages’ simulation and analyze
A small signal with amplitude of 10mv is fed into the chain with a resource output resis-
tance 50Ohm.
Harmonic balance is chosen as the simulation method here to simulate the stage’s gain.
The sweep parameter is the small signal’s frequency from 1GHz to 10GHzby step of 1GHz.
The convergence and Matrix solve type are set in ”Auto” mode.
Plots in figure(6.5) shows input and output voltage of one delay stage in the chain, their
magnitudes are nearly the same. The gain of one delay stage and twenty delay stage is shown
by the plot in figure(6.6). We can see that it is very flat from 1 to 9GHz, the deviation is about
±0.002 in this band. It should be noted that, the gain increases with frequency, it reaches the
maximum value 1.002 at about 7GHz, then drop rapidly. The peak on the curve is introduced
by multiplier, I can’t find a clear explanation at present butI found it could be controlled by the
DC current in the input buffer of the multiplier. Anyway, it improves the stage’s gain somehow.
78

6.2 Simulation results and analyze
2 4 6 80 10
0.002
0.004
0.006
0.008
0.000
0.010
mag(H
BV
0)
2 4 6 80 10
0.002
0.004
0.006
0.008
0.000
0.010
ma
g(H
BV
1)
f(GHz)
f(GHz)
Figure 6.5: Plots of input and output of one delay stage
The decreasing in the band higher than 7GHz should be caused by the input capacitance
of common-collector circuit. Although the emitter follower is implemented here, the output of
emitter follower is mainly dependent onre which is discussed in chapter 4.1.3 and we know
from chapter 3.2, HBT’s small signal model that
re =VT
IE(6.1)
according to the equation above, if the transistor is drivenwith low DC current, there will be
very large, by considering that the emitter follower is usedas a buffer with very low output
impedance, so largere is not what we expect. But the high DC current lead to high power
consumption, thus we should choose a compromising DC current of source follower. Finally, I
chose 1mA. in theory it should be around a couple of tens Ohm.
The magnitude of input impedance and output impedance of onesingle delay stage is
shown in figure(6.7). Comparing the output impedance of source follower and input impedance
of common-emitter circuit, we found the former one is largerthan one tens of the latter one in
high frequency band and this will cause the drop of voltage gain, that is reason for the curve to
decrease so fast in high frequency band. It seems that this problem can’t be solved by inserting
inductors between stages, because first order device will pull up the gain in high band but as
79

6.2 Simulation results and analyze
2 3 4 5 6 7 8 91 10
0.90
0.95
1.00
1.05
0.85
1.10
freq, GHz
mag(gain2)
mag(gain10)
mag(gain20)
2 3 4 5 6 7 8 91 10
0.992
0.994
0.996
0.998
1.000
1.002
0.990
1.004
freq, GHz
mag(gain2)
Figure 6.6: Plot of gain for one stage and twenty stages
well as the peak, the deviation of the gain doesn’t minish.
6.2.3 Time delay
The plot in figure(6.8) shows the time delay vs frequency, it is around 16.9 picosecond, a
very small deviation about±0.3 picosecond. The phase shift is shown in figure(6.8), we can see
it is linear, according to the discussion of time delay in chapter 4, which means the spectrum
can be recovered correctly. But it is a pity that the time delay length is not so long that we
will need many stages to get the wanted resolution, for example, about 1200 stages to realize
100MHz resolution .
There may be some solution to increase the delay length and make it near to 50ps the
maximum sampling interval. One is to add a tuning capacitance between base and collector to
increase the time constantτ = RC, but Miller effect caused by the tuning capacitance will lead
to a decreasing gain at high frequency.
The other is to increase the collector resistance, but we should keep the gain unit, thus
we should decrease the transconductance which means lower DC current. In that case, the
80

6.2 Simulation results and analyze
Frequency(GHz)
rbin
2 3 4 5 6 7 8 91 10
40
42
44
46
48
38
50
ma
g(r
ou
ts)
2 3 4 5 6 7 8 91 10
500
1000
1500
2000
0
2500
Frequency(GHz)
input impedance of common emitter
output resistance of emitter follower
(a)
(b)
Figure 6.7: (a) Input impedance of common-emitter (b) output impedance of source
follower
gain’s deviation will become larger. So, these two solutionwill both introduce new problems
in circuit.
6.2.4 Transient simulation
The voltage swing can be observed by using transient simulation, fro example, a 8GHz
frequency sinusoid is used as the input signal for one stage,the input voltage and output voltage
swing of this stage is shown in figure(6.9) The two waves are nearly the same amplitude but a
small delay, and it is observed that their shapes are the samethus no distortion happened.
81

6.2 Simulation results and analyze
2 3 4 5 6 7 8 91 10
1.56E-11
1.58E-11
1.60E-11
1.62E-11
1.64E-11
1.54E-11
1.66E-11
freq, GHz
de
lay1
2 3 4 5 6 7 8 91 10
130
140
150
160
170
120
180
freq, GHz
phase
f(GHz)
delay(s)
f(GHz)
(a)
(b)
Figure 6.8: (a) Phase shift plot (b) Time delay plot
6.2.5 Power Consumption
DC voltage bias of delay stage is 2.3V, DC current are respectively 560µA and 1mAfor the
the common-emitter differential pair’s and a source follower, thus the total DC current is about
4.2mA including the current mirror. The power for one delay stage is 9.6mW.
For the multiplier, the DC bias is 3.1V, and total current is about 5.76mA, thus the power
consumption of one multiplier is about 17.86mW.
The total power consumption for one stage which includes a delay cell and a multiplier
is 27.5mW, most of the power is consumed by the source follower buffer which needs high
current bias to work with a small output resistance which is discussed in Chapter 6.2.2.
82

6.3 Power spectrum recovery
0.57 0.64 0.71 0.79 0.86 0.930.50 1.00
-0.005
0.000
0.005
-0.010
0.010
time, nsec
vo
ut3
vo
ut4
ns
v
Figure 6.9: Voltage swing in transient simulation
6.3 Power spectrum recovery
For the delay time 16.9ps per stage, as what discussed in chapter 4.1.1 and according to
equation(4.4, it needs twelve hundreds of stages to achieve the goal of 100MHz resolution and
six hundreds of stages for 200MHz resolution.
According to the simulation result shown in figure(6.6), the gain decreases a lot after 9GHz.
But if only considering about the bandwidth from 1 to 9GHz, the deviation is±0.002 from
unit one and it could be possible to build a circuit of 600 stages.
The power spectrum’s of 600 stages’ circuit is simulated in Matlab and window’s plots
for one tone in time and frequency domain are shown in figure(6.10). As discussed in the
chapter design consideration the power of signal is transformed from signal’s correlation, thus
the window’s shape of signal’s power is the correlation of windows function in time domain or
multiplication in frequency domain. Here, the power window’s function is the correlation of
rectangular window function in time domain, and the the function of (1± 0.002)n, wheren is
the sampling sequence number. From the simulation of 600 stages’circuit, it can be imaged for
1200 stages, the difference between the peaks of window’s main lobe forgain= 1± 0.002 will
be larger than 600 stages’.
It should be noted that the gain’s deviation changes gradually, which means the main lobe’s
peaks of two nearby frequencies shares the similar height. From the plot in figure(6.10) we see
that the side lobes of window in frequency domain are very small and decay very quickly with
frequency, thus the side lobes of a frequency component withhigh main lobe nearly gives no
influence to another frequency component with low main lobe.For example the side lobes
of frequency component at 7GHz with gain being 1.002 doesn’t affect the 1GHz frequency
component’s main lobe even though the first one’s main lobe isseveral times larger than the
83

6.3 Power spectrum recovery
0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0 7 0 0 0
1
2
3
4
- 6 0 0 - 4 0 0 - 2 0 0 0 2 0 0 4 0 0 6 0 0 0
0.5
1
1.5
2
-
1 5
-
10
-
5 0 5
10 1 5
1.5
1
0.5
0
(a)
(b)
(c)
red curve: gain=1+0.002
green curve: gain=1-0.002
red curve: gain=1+0.002
green curve: gain=1-0.002
n
stages sequence number
fs*n
Figure 6.10: (a)Window’s function in time domain, (b)Window’s function in frequency
domain, (c)Zoom out of main lobe
latter. So we can conclude that the 1200 stages’ circuit of 100MHz resolution can still reveal
the power spectrum with right resolution and but not accurate quantity.
A example simulated by Matlab is given below to illustrate what the power spectrum will
look like.
In this example, I assume a signal with same weight frequencies at 8GHzand 8.2GHz, and
the gain for the two frequency components are both 1.002 per stage. Time delay per stage is
16.9ps, and total stages number is 600.
For the plot in figure(6.11-a), it is observed that the two frequencies can be distinguished in
the spectrum simulated by Matlab, and each mainlobe’s widthis about 200MHz. It is noted that
the peaks of the two frequencies are not exactly at the 8GHzand 8.2GHzbut a litter difference,
84

6.3 Power spectrum recovery
Frequency(GHz)
(a) Spectrum of signal with frequencies 8 and 8.2 GHz
(c) Spectrum of signal with frequencies 4 and 8 GHz
(b) Spectrum of signal with frequencies 8 and 8.1 GHz
Figure 6.11: The simulation plots of example
85

6.4 layout
it is because:
• when simulating in Matlab, the infinite integration processis approximated by long but
finite sum, so the nonperiodic truncated signal sequence maycause this problem.
• Even the side lobes are very small, but they will still affect other frequencies more or
less, especially the ones nearby.
I think if using a long time integration, this problem will beimproved more or less.
Let’s change the frequency 8.2GHz to 8.1GHz, the plot in figure(6.11-b) shows the simu-
lation result after the change. It is observed that the positions of the peaks are moved from the
right ones, it is because the the frequencies difference are smaller than the resolution 200MHz-
the width of the mainlobe, and mainlobes are overlapped. Andthe first sidelobes also seriously
affect their positions each other.
Last, have a look at the simulation plot(c) of two frequencies far off each other. Assume
the frequencies are 4GHzand 8GHzand for 4GHz the gain per stage is 1, for 8GHz1.002. It
is obvious that the different gain lead to different magnitudes, the magnitudes radio between
4GHzand 8GHzcoincides the simulation plot in figure(6.10), where the magnitude forgain=
1.002 is about 2 and forgain = 0.998 is about 0.5. In plot(c), the magnitude forgain = 1.002
at 8GHz is about twice the magnitude forgain= 1 at 4GHz.
6.4 layout
The last part of this thesis is the layout of circuit using specific technology that represents
underlying process. Simulation of a circuit provides results based on device models but it
does not incorporate metal routing for interconnect. As discussion in the former chapters,
the delay cell requires very accurate and constant delay time and gain, thus the behavior of
analog and Radio Frequency (RF) circuits is extremely sensitive to layout-induced parasitics,
especially the interconnect capacitances and inductanceswhich have a very high impact on
circuit performance.
The layout generated by using Cadence with library ”horn2000Lib” is shown in figure(6.12).
There are one delay cell and one multiplier included in one stage of analog correlator. DC
voltage bias is 2.3v for delay cell and 3.1v for multiplier. The size of one stage’s layout is
480um× 320um.
86

6.4layout
2.3v 3.1v
ground
ground
differetial
input
differetial
inputdifferetial
output
Fig
ure
6.1
2:
On
estag
e’slayo
ut
87

Chapter 7
Conclusions
The purpose of this project work is to investigate different strategies for the implementation
of analog correlators and work out the advantages as well as disadvantages of these circuits.
Based on these discussions, MMIC design should be undertaken and prototype circuits should
be presented with bandwidth approaching 10 GHz.
Based on the theory study of signal processing and HBT high frequency response, two
points should be taken care of when designing the circuit:
• In ideal case, it is supposed that the gain per stage should beconstant one with over
the band from 1 to 10GHz. But in practical circuit, it is impossible to generate the
absolute constant gain, which means, more or less, there is deviation from constant one
for the gain per stage. Since the stages are cascaded, the gains between stages’ output
and input of first stage are geometric series. Thus, a very small deviation can lead to
large difference of gain after hundreds of stages. The simulation in Matlab shows for
the circuit with hundreds of stages, the deviation should becontrolled in the range of a
couple of millesimals, otherwise the analog correlator circuit may not reveal the power
spectrum correctly.
• According the theory of correlation , the time delay should be constant, in another word,
linear phase shift. While the absolute constant time delay is also impossible obtained by
the practical circuit. After study it is found that the phaseshift is monotonic to frequency,
the positions of power components on the spectrum is shiftedcompared with the correct
ones, but no overlap. In this case, the power spectrum may be recovered by modifying
the scale of frequency axis if we know the function of time delay vs frequency.
The prototype circuit of analog correlator is designed and simulated in ADS(Advanced
Design System). The simulation result shows the gain for onedelay stage is around one with
89

deviation±0.002 from 0 to 9GHz. In the frequency band 9 to 10GHz, the gain decreases
from 0.997 to 0.993. There is obvious an unexpected zero around 7GHz on the curve of gain,
it seems caused by the input of multiplier. I am sorry that I can’t give definite explanation
about it, but somehow, this zero compensates the lose in highfrequency band caused by pole
introduced by Miller capacitance.
Total power of one stage including a time delay cell and Gilbert-core multiplier is about
36.4mW, the main power consumption is caused by the emitter followers which are driven by
around or higher than 1mADC current for one branch to make sure the output resistance small.
So the power consumption is contradict with the bias currentof emitter follower buffer, we
should trade off them according to the different implementations.
Based on the simulation results of the one stage, we can buildan analog correlator circuit
with 600 stages, resolution 200MHz, 9GHz bandwidth and total power consumption 36.4 ×
600= 21.84W.
In the process of simulation, it is found the analog correlator is very sensitive with the
change of bias current and collector resistance which affects the overall performance. By
changing the bias point, gain per stage is changed, if the deviation is larger than 0.005, it
will be very difficult to recover the power spectrum correctly.
This project work is only a simple circuit prototype, the practical circuit will be more
complicated. The most difficult challenge in practical circuit will still be the stages’ gain.
Because the practical circuit is easily affected by temperature, power source, parasitic elements
and so on, it is really difficult to make the gain’s deviation smaller than several millesimals.
For example, the collector resistance is supposed to be hundreds Ohm, if one Ohm larger or
smaller, the influence to the gain will be a couple of centesimal which is too large for the circuit
with mangy stages.
So that, some kind of feed back circuit used to limit the gain or the output voltage’s ampli-
tude of every stage is very necessary in practical circuit.
90

Appendix A
High frequency response of emitter
follower
First, to obtain the location the transmission zero, note thatVO will be zero at the frequency
sZ for which the current fed toR′L is zero:
gm +Vπrπ+ sZCπ = 0 (A.1)
Combining with equation(3.35), thus,
sZ = −gm + (1/rπ)
Cπ= −
1Cπre
(A.2)
which is on the negative real-axis of the s-plane and has a frequency:
ωπ =1
Cπre(A.3)
The other transmission zero is ats = ∞, whereCµ acts as a short circuit, makingVπ zero, and
henceVo will be zero.
Next, we determine the poles. The resistances seen byCπ is the parallel equivalent ofRsig
and the input resistance looking into B’; that is
Rµ = Rsig//[rπ + (β + 1)R′L] (A.4)
where we can see thatRµ is smaller thanRsig and sinceCµ is also very small comparing
with Miller capacitance, the time constantCµRµ will be correspondingly small.
91

The resistanceRπ seen byCπ can be determined by the equation below:
Rπ = RsigRsig + R′L
1+Rsig
rπ+
RLre
(A.5)
We observe that termR′l/re will usually make the denominator much greater than unity, thus
renderingRπ rather low. Thus, the time constantCπRπ will be small. The end result is that the
3-dB frequencyfH of the emitter follower,
fH = 1/2π[CµRµ +CπRπ] (A.6)
will be usually very high.
92

References
B, M. (1991).Signal Detection and Estimation. Artech House.14
B, J. & H, A. (2000). An active analog delay and the delay reference loop.
California Institute of Technology, Pasadena, CA 91125. viii , 28, 30
DK, I.A.V.P.L.S.M.I., SM& SG, I., SM-
(2005,June). Ultrawide-band tunable true-time delay lines using ferroelectric varactors.
IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, 53. 24
DK, I.A.V.P.L.S.M.I., SM& SG, I., SM-
(Ericsson AB, Molndal, Sweden). Ferroelectrically tuneable delay lines.Microwave and
High speed Electronics Research Centre. viii , 24, 25, 26
D.L. H, J.C.E.C.J.S.B.M., J.H. C & T , T. (1995). Si/sige epitaxial base transis-
tors.IEEE Trans. Electron. Devices, 42, 455. 33
G, C. (2005). Development of a wide bandwidth array acousto-optical spectrometer for
the herschel satellite mission, universitat zu Koln,Mathematisch-Naturwissenschaftliche
Fakultat.9
G, C.A. (1996). http://www.ph1.uni-koeln.de/workgroups/astro instrumentation/aos/. viii ,
4
H, A. (2001). Spectrometers for heterodyne detection.Department of Astronomy, Univer-
sity of Maryland, College Park MD 20742. 8
H, A. & Z, J. (2001). A wideband lag correlator for heterodyne spectroscopy of
broad astronomical and atmospheric spectral lines.Rev. Sci. Inst., 72, 1531.viii , 8, 9, 24
93

REFERENCES
J P-C, P.C.V., R F & S, A.K. (2006). Modeling of
periodic distributed mems application to the design of variable true-time delay lines.IEEE
TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, 54. viii , 26, 28, 29
L.R, D.L.E.C.A.C., MG& G.S (1998). Wide band autocorrelator for first.
Proc. SPIE, 3357, 368. 7
S/S (1998).Microelectronic Circuits, 4th edition. OXFORD UNIVERSITY PRESS.
40
T.K.J, J.T., V.K (2001). Substrate effects in wideband sige hbt mixer.Oersted-
DTU, Department of Electromagnetic Systems, Technical University of Denmark. 76
U, N.N., N. (1973). Acoustooptic deflection materials and techniques.Proc. IEEE, 61,
1073–1092.4
94
Top Related