Tgii Final
46
Universidade Estadual de Campinas - Unicamp Faculdade de Engenharia Mecânica - FEM Engenharia de Controle e Automação Trabalho de Graduação II – ES952 A Análise de um Dispositivo Controlável destinado à Reabilitação de Membros Inferiores Autor: Renato Suekichi Kuteken RA 046149 Orientador: Prof. Dr. João Maurício Rosario Junho de 2011
-
Upload
renato-kuteken -
Category
Documents
-
view
217 -
download
1
description
Grad project. Kinda lame.
Transcript of Tgii Final

Universidade Estadual de Campinas - Unicamp Faculdade de Engenharia Mecânica - FEM
Engenharia de Controle e Automação
Trabalho de Graduação II – ES952 A
Análise de um Dispositivo Controlável destinado à
Reabilitação de Membros Inferiores
Autor: Renato Suekichi Kuteken RA 046149
Orientador: Prof. Dr. João Maurício Rosario
Junho de 2011

2
Resumo
Este trabalho visa o estudo e desenvolvimento de um dispositivo destinado a
auxiliar o processo de reeducação neuromuscular dos membros inferiores em pacientes
portadores de paraplegia ou tetraplegia. Ao final de seu desenvolvimento, é proposto
ainda o uso de técnicas de engenharia como os controladores PID, bem como é sugerida
a utilização de materiais de baixo custo com a finalidade de tornar o produto final
acessível à população de menor poder aquisitivo.
Palavras chave: Reabilitação de membros inferiores, treino de marcha, controlador
PID, aparelho de reabilitação.

3
Índice
Lista de Figuras 4
Lista de Tabelas 5
Capítulo 1 – Introdução 6
Capitulo 2 – Conceitos e Fundamentação Teórica 8
Capítulo 3 – Revisão Bibliográfica 19
Capítulo 4 – Metodologia 25
Capítulo 5 – Resultados 33
Capítulo 6 – Conclusão 36
Referências Bibliográficas 38
Apêndice A 41
Apêndice B 43

4
Lista de Figuras
Fig.1: Gráfico de distribuição de portadores por rendimento mensal. 7
Fig.2: Regiões da coluna espinhal. 8
Fig.3: Trato piramidal. 8
Fig.4: Reabilitação de portadores de deficiência. 9
Fig.5: Pêndulo simples (a) e pêndulo duplo (b). 13
Fig.6: Sistema de controle PID de malha fechada. 15
Fig.7: Diagrama de blocos do controlador PID. 15
Fig.8: Exemplo de sintonia de PID. 16
Fig.9: Sistema em malha aberta e resposta do sistema no domínio do tempo. 16
Fig.10: Efeito da ação proporcional. 17
Fig.11: Efeito da ação derivativa. 17
Fig.12: Efeito da ação integrativa. 18
Fig.13: As divisões do ciclo da marcha. 20
Fig.14: As divisões da fase de apoio. 20
Fig.15: Ciclo da Marcha. 21
Fig.16: Passo e passada. 22
Fig. 17: Homem Vitruviano, de Leonardo da Vinci 22
Fig. 18: Determinação dos Comprimentos dos Segmentos 23
Fig. 19: Dispositivo de treino de marcha proposto por Agrawal. 24
Fig. 20: Mecanismo serial (a) e mecanismo paralelo (b). 25
Fig. 21 Mecanismo híbrido. 26
Fig. 22 Modelo Dinâmico em Simulink. 29
Fig. 23 Modelos dinâmicos de cada sistema em Simulink. 30
Fig. 24 Fluxograma do programa. 31
Fig. 25 Resposta ao degrau de amplitude 12 no quadril. 33
Fig. 26 Resposta ao degrau de amplitude 4 no joelho. 34
Fig. 27 Resposta ao degrau de amplitude 1.2 no quadril. 34
Fig. 28 Resposta ao degrau de amplitude 0.4 no joelho. 35
Fig. 29 Exemplo de um mecanismo para simular o movimento de marcha. 41
Fig. 30 Ângulos das juntas da perna durante a marcha. 42
Fig. 31 Ângulos do joelho ao longo do ciclo da marcha. 46
Fig. 32 Ângulos do quadril ao longo do ciclo da marcha. 46

5
Lista de Tabelas
Tab.1: Porcentagem de portadores deficiência, por faixa etária. 6
Tab.2: Distribuição normal dos períodos de contato com o solo. 21
Tab.3: Determinação da Massa dos Segmentos. 23
Tab.4: Classificação das órteses segundo as partes do corpo envolvidas. 24

6
Faixa Etária
Portadores de Tetraplegia,
Paraplegia ou Hemiplegia
Permanente
0 a 17 anos 0,207%
18 a 29 anos 0,314%
30 a 39 anos 0,435%
40 a 49 anos 0,580%
50 a 59 anos 0,971%
60 a 69 anos 1,651%
70 anos ou mais 3,446%
Total 0,552%
Capítulo 1 – Introdução
Tetraplegia e paraplegia são deficiências decorrentes de lesões na medula
espinhal. Caracterizam-se por paralisias totais ou parciais dos membros do corpo.
Denomina-se paraplegia quando a paralisia ocorre apenas nos membros inferiores e
tetraplegia quando ocorre nos quatro membros.
Com 937 463 indivíduos (CENSO2000), os portadores de tetraplegia e
paraplegia representam uma parcela significativa da população no Brasil.
Tabela 1: Porcentagem de portadores deficiência, por faixa etária (elaborado a partir de
dados do CENSO2000).
De acordo com um levantamento realizado em 2009 pela AACD, 40% dos casos
de lesões medulares atendidos pela instituição ocorrem em decorrência de acidente de
trânsito, 32% por ferimento com arma de fogo, 14% por quedas e 8% por acidentes de
mergulho.
Não se pode negar que há muito investimento e pesquisa em tecnologias e
soluções de engenharia direcionadas ao auxilio de portadores de deficiência física.
Como exemplo, podemos citar técnicas de fisioterapia, órteses, próteses, e
equipamentos de reabilitação.
O problema reside no fato de que, em geral, os custos dos produtos e serviços
disponíveis são muito altos. Em contraste, do total de indivíduos, a maioria dos
portadores de deficiência possui baixa renda e, portanto, não têm acesso a um
tratamento adequado. Este fenômeno é observável no gráfico da Figura 1, plotado a
partir de dados do Censo 2000.

7
Figura 1: Gráfico de distribuição de portadores por rendimento mensal etária (elaborado
a partir de dados do CENSO2000).
Com base no problema descrito acima, definimos como objetivos deste projeto:
Propor um equipamento de baixo custo destinado à fisioterapia dos
membros inferiores;
Estudar um modelo mecânico para o equipamento, bem como propor
uma estratégia de controle baseada em informações médicas e
ortopédicas.

8
Capítulo 2 – Conceitos e Fundamentação Teórica
Deficiência física
A paraplegia caracteriza-se pela perda de sensibilidade e funções motoras nos
membros inferiores. A tetraplegia, por sua vez, afeta a sensibilidade e mobilidade tanto
dos membros superiores quanto inferiores. São patologias normalmente causadas por
lesão na medula espinhal ou por alguma condição médica congênita. A área afetada da
medula é determinante no tipo de patologia desenvolvida. Na paraplegia, são afetadas as
áreas torácica, lombar ou sacral, enquanto que na tetraplegia, a área afetada é a cervical.
Figura 2: Regiões da coluna espinhal (fonte da imagem: www.spinal-
injury.net/complete-sci.htm).
Qualquer doença que afete a medula no trato piramidal pode provocar paralisia.
Composto por neurônios motores, este trato é responsável pelos movimentos e pelos
dados relacionados à capacidade de movimentação.
Figura 3: Trato piramidal (fonte da imagem:
pt.wikipedia.org/wiki/Trato_corticoespinhal).

9
Acidentes com veículos são a causa mais comum dos traumas. Outros traumas
são provocados por fatores como violência, acidentes esportivos e câncer. Estes causam
lesões na medula espinhal, geralmente por conta de fragmentos de ossos das fraturas
vertebrais. Além da lesão na medula, a paralisia também pode ser decorrente de lesões
no cérebro.
A paraplegia é mais raramente causada por dano aos nervos das pernas. Essa
forma de dano geralmente não é simétrica e causaria polineuropatia (distúrbio onde
vários nervos periféricos pelo corpo param de funcionar simultaneamente) em vez de
paraplegia. Apesar disso, este tipo de lesão pode provocar paraplegia se forem afetadas
fibras motoras.
Incapacitações em pessoas paraplégicas e tetraplégicas
Ainda que seja possível caminhar em algum grau, muitos portadores de
paraplegia dependem de cadeira de rodas, andadores ou outras medidas de apoio. Além
da paralisia dos membros, a deficiência também provoca problemas no controle urinário
e fecal, disfunções sexuais, dificuldade na respiração e na digestão, entre outros
problemas.
A diminuição na movimentação também causa problemas, entre eles pneumonia,
trombose e úlceras de pressão. Estes podem ser prevenidos com uma rotina de auto-
cuidado e atenção, e devem tratadas com a fisioterapia e tecnologias de assistência.
Figura 4: Reabilitação de portador de deficiência (fonte da imagem:
www.aril.com.br/blog/nosso-trabalho/programa-de-habilitacao-e-
reabilitacao/fisioterapia).

10
Além dos já citados, espasticidade, infecções, doenças respiratórias,
cardiovasculares e problemas ósseos como a osteoporose e fraturas são outros dos
vários problemas enfrentados pelos portadores de deficiência motora.
Conceitos mecânicos aplicados à marcha humana
Segundo VIEL (2000), “a aplicação de princípios de mecânica ao corpo
humano baseia-se essencialmente na aplicação das leis de Newton:
Primeira Lei de Newton (inércia. corpo em repouso): a inércia é diretamente
proporcional à massa; é preciso desenvolver uma força para superar a inércia
(os músculos combatem a gravidade); quanto mais a massa aumenta, mais a
força necessária para a aceleração deve aumentar.
Segunda Lei de Newton (aceleração, corpo em movimento): se duas forças de
potências diferentes são aplicadas em objetos de massa igual, a força mais
importante produz a aceleração mais considerável; a força que acelera o objeto
pode ser externa ou interna.
Terceira Lei de Newton (reação): toda ação produz uma reação. A reação ao
solo durante o apoio e a fricção sobre a superfície de apoio, fenômenos não
perceptíveis a olho nu, representam um papel importante na marcha, pois o
equilíbrio e a propulsão estão baseados nestes fatores.
Abaixo estão, em ordem alfabética, alguns outros conceitos de mecânica úteis ao
estudo da marcha.
Aceleração: mudança de velocidade no deslocamento de um corpo, ou mudança
na direção do deslocamento.
Cadeia Cinemática: utilizada para descrever a estrutura das alavancas ligadas
entre si e capaz de acionar as máquinas. Trata-se de uma descrição da
estrutura.
Cadeia cinética: utilizada para descrever o movimento dos membros, tanto
livres (cadeia cinética aberta) quanto apoiados no solo (cadeia cinética
fechada). Trata-se de uma descrição do movimento.
Centro de gravidade (CG): ponto formal que representa o centro de massa do
corpo, imóvel ou móvel. Uma vez determinada a posição do Centro de
Gravidade, fica mais fácil compreender o movimento. Quando o centro de
gravidade eleva-se em relação à base, a estabilidade dinâmica torna-se melhor.
Abaixar a posição do CG melhora o equilíbrio estático, mas reduz a capacidade
de equilíbrio dinâmico.
Centro de pressão (CP): a sucessão dos pontos de aplicação da massa do CG
sobre o pé.

11
Cinemática: estudo formal das estruturas móveis. A análise do deslocamento de
dois elos cinéticos ligados entre si (coxa e perna ligados pelo joelho) diz
respeito à cinemática.
Cinética: estudo formal das variações de aceleração de uma massa (energia
cinética) expressa por 1/2 mv². Se o pé de um jogador de futebol, representado
por uma massa m1, deslocar-se a uma velocidade v1, para bater em uma bola
m2, também móvel, a uma velocidade v2, há uma transferência de aceleração.
Cisalhamento (Shear Stress): força de dilaceração que é exercida quando dois
corpos sólidos são animados por deslizamentos paralelos invertidos. Os meios
de união (cápsula articular, ligamentos) são então distendidos por uma forte
tensão.
Coeficiente de fricção (partida, deslizamento, parada): a marcha requer um
coeficiente de fricção suficiente, trata-se da capacidade do pé para apoiar-se
sobre uma superfície firme e propulsionar o corpo do indivíduo para frente.
Compressão: força que é exercida no sentido da aproximação de dois corpos
potencialmente móveis, como, no nosso caso, as superfícies articulares. A
deformação devida à compressão é causada, ao mesmo tempo, pela intensidade
do esforço e pelo tamanho da superfície de apoio.
Deformação (Strain): resultado da pressão ou da tração exercida pelas forças
aplicadas a um corpo deformável. O conjunto dos tecidos humanos é
organizado da seguinte forma:
a. Tecido ósseo: muito pouco deformável.
b. Tecido de colágeno (ligamentos, tendões, aponeuroses ou fascia): mais
ou menos deformável, de acordo com a densidade, entre 1.8% e 14% do
comprimento de origem. Cada fibra de colágeno é inextensível, mas a
estrutura do tecido permite o seu alongamento.
c. Tecido muscular: muito deformável, extensível e além disso, dotado de
contratilidade.
Disfunção: funcionamento irregular, anormal, exagerado ou diminuído de um
mecanismo ou de um organismo.
Energia cinética (Momentum): a energia cinética é o produto da massa pela
velocidade de um corpo. As variações de energia cinética no corpo humano são
produzidas por mudanças de velocidade e não por mudanças de massa. A
adição de uma massa externa (cargas ao redor do tornozelo) aumenta a energia
cinética ao aumentar a massa artificialmente. Uma vez a energia armazenada e
estendida, uma frenagem deve intervir. As atividades motoras incorporam a
reutilização da energia cinética.
Equilíbrio: estado obtido quando uma carga aplicada a um corpo não
desencadeia aceleração. Aplicando-se estritamente esta definição, não

12
poderíamos mais falar de equilíbrio durante a marcha, fenômeno de aceleração
constante, razão pela qual preconizamos a seguinte distinção: equilíbrio
estático, correspondendo à definição mecânica; equilíbrio dinâmico, obtido
durante o movimento pelo equilíbrio conservado entre os diferentes segmentos
do corpo.
Estabilidade: quanto mais a base de sustentação se amplia, mais a estabilidade
aumenta. O aumento da base de sustentação aumenta a estabilidade, mas
excesso de estabilidade torna-se um entrave à mobilização buscada pelo ser
humano. Durante o apoio unipodal, a base de sustentação dinâmica não pode se
ampliar. As atividades motoras da marcha têm por objetivo garantir a
estabilidade dinâmica. Não devemos estabelecer uma equivalência entre
estabilidade e equilíbrio, sobretudo no que se refere ao equilíbrio dinâmico do
ser humano em marcha.
Estricção (Stress): força que é aplicada a um corpo para deformá-lo, tanto em
compressão quanto em tração.
Frenagem: resistência ou atraso concedido ao corpo para ser mobilizado pela
massa que deve ser deslocada, ou por uma fração (interna ou externa) que se
opõe à aceleração. A resistência visco-elástica dos músculos é um exemplo de
atraso de origem interna, modulado pela capacidade de pré-regulagem da
tensão ativa do músculo.
Atrito: resistência que se opões ao deslizamento de um corpo sobre outro, de
uma superfície contra a outra. Na ausência de atrito, o movimento horizontal é
impossível. De pé sobre o gelo de um lago congelado, o indivíduo encontra-se
nas condições ideais, já que não está submetido ao atrito, mas ele não pode
andar. Para avançar, ele precisa do atrito com um solo rugoso. Para os fluídos
ou para os corpos maleáveis, o atrito é expresso relativamente à viscosidade.
Desta forma, a intensidade da viscoelasticidade muscular depende do atrito
interno.
Gravidade: Resultado da atração terrestre, que mantém o indivíduo na
superfície de apoio e lhe fornece o atrito do qual necessita para garantir sua
propulsão horizontal.
Inércia: resistência de um corpo à aceleração. O coeficiente de inércia depende
da massa a ser deslocada e do atrito possível.
Movimento: Existem, no corpo humano, dois tipos de movimento: Translação e
Rotação. A marcha é uma translação horizontal, paralela à superfície de apoio,
que resulta dos movimentos angulares das articulações. A marcha descreve um
movimento angular (sobretudo da pelve), ao passo que a extremidade distal (o
pé) é animada por um movimento linear. Na extremidade do pêndulo duplo do
membro inferior (o pé), registramos uma velocidade linear considerável.
Pêndulo: sistema oscilante a uma freqüência constante, que tende à voltar à
posição de equilíbrio. A freqüência depende da distância que separa o ponto de

13
oscilação do sólido móvel animado: quanto maior for a distância, mais baixa
será a freqüência. O ser humano foi descrito como "um pêndulo invertido",
tendo como ponto de oscilação os tornozelos. Membros inferiores longos
colocam o CG longe do ponto de oscilação e reduzem a freqüência das
oscilações, o que é favorável ao equilíbrio dinâmico.”(VIEL, 2000)
Ligações mecânicas
Ligações mecânicas são sistemas mecânicos compostos por múltiplas peças.
Estas peças podem se conectar umas as outras de modo que a junção seja fixa,
rotacional ou translacional.
As ligações mecânicas são desenvolvidas para transformar uma determinada
entrada de força e movimento em uma saída de força e movimento desejada. A
proporção da força de saída em relação à força de entrada é conhecida como vantagem
mecânica da ligação, enquanto que a proporção da velocidade de entrada em relação à
velocidade de saída é conhecida como razão de velocidade.
O estudo destas ligações tem em vista apenas interação entre os elos, de modo
que estes são trados como corpos ideais, rígidos e livres de atrito.
Existem dois tipos de ligações mecânicas: as seriais e as paralelas.
As ligações seriais são aquelas cujos elos são conectados em série, sendo cada
junta de conexão movida por seu próprio atuador, independentemente. As ligações em
paralelo são aquelas que possuem cadeias fechadas de elos interconectados, isto faz com
que a movimentação de um elo dependa da movimentação de outro, tornando possível
mover uma junta ao acionar o atuador de outra.
Coordenadas generalizadas
Para realizar o modelamento dinâmico do equipamento, utilizaremos as
coordenadas generalizadas e o sistema de Equações de Lagrange.
Figura 5: Pêndulo simples (a) e pêndulo duplo (b).

14
Consideremos o pêndulo de simples de massa , comprimento fixo
mostrado na Figura 5a.
As duas coordenadas e poderiam ser usadas para localizar , porém elas
não são independentes uma da outra, sendo necessário incluir uma equação de vínculo:
Assim, e não são coordenadas generalizadas.
Se utilizarmos agora uma única coordenada , ela será suficiente para
determinar a posição de , uma vez que o pendulo é um sistema com um grau de
liberdade. Assim, é uma coordenada generalizada.
O pêndulo duplo da Figura 5b é um sistema de dois graus de liberdade.
As posições das duas massas podem ser descritas pelas coordenadas e , que são
generalizadas, pois podem variar independentemente uma da outra.
Concluímos então que coordenadas generalizadas são parâmetros numéricos
relacionados aos graus de liberdade e que representam comprimentos, ângulos ou
qualquer outro conjunto de quantidades independentes que definam a posição do
sistema.
Modelamento Dinâmico
As equações de Lagrange são um método que permite a obtenção das equações
de movimento, expressas em coordenadas independentes do problema, simplesmente
pela diferenciação da energia dessas mesmas coordenadas generalizadas. São
principalmente aplicadas em sistemas de partículas com múltiplos graus de liberdade,
apresentam a vantagem de não envolver forças vinculares que não realizam trabalho e
que freqüentemente complicam a formulação das equações do movimento a partir das
equações de força-massa-aceleração. Além disso, a aproximação lagrangeana requer
que se expressem as velocidades em vez das acelerações que, por sua vez, requerem
freqüentemente a utilização dos princípios da cinemática para serem determinadas. As
equações de Lagrange estão entre os mais uteis métodos avançados empregados em
Mecânica e são muito utilizadas na análise de sistemas elétricos e eletromecânicos.
As equações de Lagrange estão apresentadas abaixo para um sistema com
graus de liberdade e n partículas:
onde L é a função lagrangeana, calculada a partir da energia cinética T e da energia
potencial V do sistema:

15
Controladores PID
Controladores do tipo Proporcional, Integral e Derivativo (PID) são largamente
utilizados nas fábricas por serem facilmente implementáveis, de baixo custo e versáteis.
Abaixo será apresentada a estrutura básica de um controlador PID, citando os efeitos de
cada uma das ações Proporcional, Integral e Derivativa.
Figura 6: Sistema de controle PID de malha fechada.
Considere inicialmente o sistema de controle em malha fechada da Figura 6. O
controlador do diagrama de blocos mostrado tem como objetivo gerar um sinal de
controle u(t) em sua saída. A construção deste sinal de controle deve ser baseada no
sinal de diferença existente entre o sinal de referência r(t) e o sinal de saída y(t).
Figura 7: Diagrama de blocos do controlador PID.
Observando agora o diagrama de blocos do controlador PID (Figura 7), vemos
que o sinal gerado pelo controlador é dado pela função:
onde:

16
(a)
(b)
Tomando como exemplo a simulação em MATLAB/Simulink de um sistema
com uma planta
e entrada degrau de amplitude 10, iremos sintonizar os
parâmetros , e e observar seus efeitos sobre a saída.
„
Figura 8: Exemplo de sintonia de PID.
Primeiramente, simulamos o sistema em malha aberta e determinamos o que
precisa ser otimizado na saída:
Figura 9: Sistema em malha aberta (a) e resposta do sistema no domínio do tempo (b).
Observamos que a saída demora para estabilizar e que o sinal em regime difere
muito do sinal de referência desejado. Para corrigir o tempo de resposta do sinal,
fecharemos a malha e colocaremos um controlador PID.
O primeiro parâmetro a ser sintonizado é o , que reduz o tempo de resposta.
Fazendo , a saída fica:

17
Figura 10: Efeito da ação proporcional.
Observamos que o tempo de resposta diminuiu, mas ocorreu um sobressalto de
sinal. Para reduzir este sobressalto, sintonizamos . Fazendo , a saída fica:
Figura 11: Efeito da ação derivativa.
Por fim, sintonizamos para corrigir o erro de regime permanente. Fazendo
, a saída fica:

18
Figura 12: Efeito da ação integrativa.
Resumindo:
O parâmetro corrige o tempo de resposta e provoca um sobressalto;
O parâmetro corrige o sobressalto provocado por ;
O parâmetro corrige o erro de regime permanente.
Devem-se ajustar os parâmetros até que se obtenha uma resposta aceitável na
saída do sistema.

19
Capítulo 3 – Revisão Bibliográfica
Noções de Fisioterapia
VIEL (2000) estabelece em linhas gerais os pontos principais dos exercícios de
fisioterapia destinados aos membros inferiores: “os deslocamentos do quadril são
essenciais durante a marcha bípede. Complexos em demasia, eles não podem ser
explicados a uma pessoa cuja marcha está perturbada por disfunções; é preferível fazê-
la perceber e, em seguida, automatizar os dois movimentos essenciais de deslocamento
da pelve: desvio lateral e, a seguir, rotação.
O indivíduo que nunca teve consciência dos movimentos de sua pelve quando
ela era normal, não é capaz de recriá-los quando for vitimado por um distúrbio
significativo. Em vista do que for observado, parece importante seguir os seguintes
passos:
Restaurar o hábito de realizar deslocamentos laterais da pelve, primeiramente
parado, deslocando-se de um quadril a outro, se necessário, com suporte;
Retomar a capacidade para executar rotações alternadas, fixando-se, a cada
vez, em um quadril diferente.
Um treinamento eficaz deve ser baseado no conhecimento das atividades motoras
de indivíduos sãos. Uma vez obtidos os movimentos da pelve, as outras ações irão se
encadear.
A marcha é o resultado de uma interação entre três elos cinéticos: os dois membros
inferiores e a pelve. A mobilidade controlada da pelve constitui o elemento essencial
deste mecanismo.” (VIEL, 2000)
Abaixo descrevemos as atividades motoras de um indivíduo de marcha normal.
Fases da Marcha
Segundo VIEL (2000), convenciona-se que os laboratórios descrevam a
trajetória da marcha do membro inferior direito como sendo um ciclo. Este ciclo é
dividido em uma fase de apoio e outra de balanço (Figura 13).
"A fase de apoio corresponde à tomada de equilíbrio sobre um único pé, com o
peso do corpo na vertical do pé de apoio. Os esforços musculares são concentrados
durante essa fase, que é, ao mesmo tempo, de sustentação e de equilíbrio.
A fase de oscilação (do membro inferior que estava apoiado) corresponde à
atividade de procurar o solo à sua frente a fim de avançar. A atividade muscular é
mínima, sobretudo por uma recuperação da energia cinética." (VIEL, 2000)

20
Figura 13: As divisões do ciclo da marcha (VIEL, 2001).
Ainda segundo VIEL (2000), a fase de apoio é, por sua vez, dividida em três
partes (Figura 14): os duplos apoios no início e no fim da fase e o período em que o
peso é equilibrado em um pé apenas. A relação entre o apoio e o duplo apoio é afetada
em um grande número de patologias e constitui um fenômeno possível de ser estudado
clinicamente.
Figura 14: As divisões da fase de apoio (VIEL, 2001).
O duplo apoio ocorre na ocasião da transferência do equilíbrio de uma perna
para outra, ou seja, no momento em que o calcanhar de um pé começa a fornecer apoio
ao corpo, antes que os dedos do outro pé deixem o solo. O duplo apoio inicial (DC1)
ocorre no inicio da fase de apoio, quando o equilíbrio está sendo transferido para o pé
observado (o direito, no caso dos diagramas mostrados), enquanto o duplo apoio final
(DC2) ocorre no fim da fase de apoio, quando os dedos do pé observado ainda não
deixaram o solo e o equilíbrio é transferido para o calcanhar do outro pé.

21
Segundo PERRY (2001), a fase de contato com o solo corresponde a 60% do
ciclo da marcha, enquanto a fase de balanço corresponde a 40% (Tabela 2). Durante a
fase de apoio, cada intervalo de duplo é equivalente a 10% do ciclo da marcha,
enquanto o apoio simples fica com os 40% (do ciclo da marcha) restantes da fase. Vale
observar, pela Figura 13, que a fase de apoio simples de um membro equivale a fase de
balanço do outro membro.
Períodos de Contato com o Solo
Apoio 60%
Duplo Apoio Inicial 10%
Apoio Simples 40%
Duplo Apoio Terminal 10%
Balanço 40%
Tabela 2: Distribuição normal dos períodos de contato com o solo (PERRY, 2001).
Figura 15: Ciclo da Marcha (VAUGHAN, DAVIS e O‟CONNOR, 1992).
“A duração precisa desses intervalos do ciclo de marcha varia com a velocidade
de marcha do indivíduo. Na velocidade de marcha habitual de 80m/min, os períodos de
apoio e balanço representam respectivamente 62% e 38% do ciclo de marcha. A
duração de ambos os períodos da marcha apresenta uma relação inversa com a
velocidade da marcha. Isto é, tanto o tempo total de apoio como o de balanço diminuem
conforme a velocidade da marcha aumenta. A mudança nos tempos de apoio e de
balanço torna-se progressivamente maior conforme a velocidade diminui. Entre as
subdivisões do apoio existe uma relação diferente. A velocidade de marcha mais rápida
alonga proporcionalmente o apoio simples e encurta os dois intervalos de duplo apoio.
O inverso é verdadeiro, conforme a velocidade da pessoa diminui. Esse padrão de
mudança também é curvilíneo.
Um intervalo quando ambos os pés estão em contato com o solo para os
membros trocarem seus papéis de apoio é uma característica básica da marcha.
Quando o apoio duplo é omitido, a pessoa inicia o modo corrida.” (PERRY, 2001)

22
Ainda segundo PERRY (2001), o ciclo da marcha também pode ser descrito
pelos termos 'passo' e 'passada' (Figura 16).
O passo se refere ao intervalo transcorrido entre os dois membros. Para a marcha
saudável, ocorre no ponto médio de uma passada, tendo duração igual para os dois pés.
Figura 16: Passo e passada (adaptado de VAUGHAN, DAVIS e O‟CONNOR,
1992).
A passada equivale ao ciclo da marcha inteiro (para um membro) e corresponde
a dois passos. É o tempo decorrido entre dois contatos iniciais consecutivos do membro
observado. Assim como o passo, tem o mesmo tempo de duração para os dois pés, no
caso da marcha não patológica.
Antropometria aplicada à ergonomia no desenvolvimento de equipamentos
Segundo RODACKI, a antropometria é o estudo das proporções e medidas do
corpo humano. Em princípio era aplicada apenas nas artes, destacando-se, neste campo,
obras como as construções gregas e o desenho do Homem Vitruviano, por Leonardo da
Vinci.
Figura 17: Homem Vitruviano (Leonardo da Vinci, 1490).
A partir do século XIX, a antropometria passou a ser utilizada como referência
para projeto de produtos. Desde então se tornou imprescindível para o correto
dimensionamento de projetos e seus métodos de obtenção de dados foram padronizados
e refinados, incorporando também o uso de ferramentas estatísticas e computacionais.

23
Estatisticamente, as dimensões lineares do corpo humano possuem distribuição
normal, de modo que a freqüência de uma determinada dimensão apresenta a forma de
uma curva gaussiana.
Para o desenvolvimento de um produto ergonômico que beneficie o maior
número de pessoas, faz-se necessário escolher uma faixa da população para a qual o
equipamento vai ser concebido e estabelecer os limites (percentil) da dimensão
antropométrica observada. Em geral são escolhidos percentis em torno de 90%, mas isto
pode variar, dependendo do público a que se destina o equipamento.
Neste projeto, foram utilizados dados sobre a localização proximal dos centros
de massa da perna e da coxa, bem como o peso e o comprimento de cada segmento.
Estes valores, obtidos dos trabalhos de RODACKI e de SANTOS e FUJÃO (2003), são
expressos como proporções do peso e da altura do indivíduo e são apresentados na
Tabela 3 e na Figura 18 abaixo.
Segmento Corporal Porcentagem da Massa
Total do Corpo (%)
Posição do Centro de
Massa no Segmento (%)
Coxa 10,3 43 (Proximal)
Perna 4,3 43 (Proximal)
Tabela 3: Determinação da Massa dos Segmentos (adaptado de SANTOS e
FUJÃO, 2003).
Figura 18: Determinação dos Comprimentos dos Segmentos (RODACKI).
Vale mencionar ainda que o comprimento proximal é definido como a distância
entre o ponto observado e a junta mais próxima do tronco. No caso da coxa, trata-se da
distância do ponto até a junta do quadril. No caso da perna, é a distância do ponto até a
junta do joelho.

24
Estado da arte
Existem atualmente diversas pesquisas na utilização de técnicas de engenharia
para reabilitação e auxilio aos portadores de deficiência. Em geral, elas possuem uma de
duas finalidades: prover independência a estes indivíduos ao ampliar sua mobilidade
(como ocorre em cadeiras motorizadas e carros adaptados) ou ajudar na fisioterapia de
reeducação muscular (como ocorre em aparelhos de treinamento).
Dispositivos do tipo exoesqueleto destinados à correção de deficiências em
membros inferiores são classificados conforme as partes do corpo que eles auxiliam:
Partes do corpo envolvidas Classificação
Tornozelo e pé AFO
Joelho, tornozelo e pé KAFO
Quadril, joelho, tornozelo e pé HKAFO
Tabela 4: Classificação das órteses segundo as partes do corpo envolvidas.
Entre os diversos trabalhos, podemos citar propostas de sistemas de controle
para supressão de tremores e espasmos, órteses passivas ajustáveis a diferentes pesos e
geometrias, que suportam e equilibram o peso do corpo e órteses ativas que movem as
pernas dos pacientes em uma trajetória pré-definida.
Figura 19: Dispositivo de treino de marcha (BANALA, KULPE e AGRAWAL,
2007).

25
Capítulo 4 – Metodologia
A função do equipamento que queremos desenvolver é guiar a perna do usuário
nos exercícios de fisioterapia, fornecendo sustentação e atuando no processo de
reeducação motora.
Para a realização deste projeto, foram analisados os mecanismos de ligações
mecânicas serial, paralela e híbrida (paralela auxiliada por molas), observando-se as
vantagens e desvantagens de cada configuração mencionada.
Figura 20: Mecanismo serial (a) e mecanismo paralelo (b) (AGRAWAL e
AGRAWAL, 2004).
(b)
(a)

26
Figura 21: Mecanismo híbrido (AGRAWAL e AGRAWAL, 2004).
Estes mecanismos foram modelados através do método das equações de
Lagrange, dando origem às equações de movimento (um exemplo da aplicação deste
método para órteses pode ser encontrado no Apêndice A). Estas equações nos fornecem
os ângulos das juntas do sistema, dependendo dos torques fornecidos pelos atuadores
(Sendo o torque no quadril e o torque no joelho).
Para o sistema de mecanismo serial (Figura 20a):
Onde,

27
Para o sistema de mecanismo paralelo:
Onde,

28
Para o sistema de mecanismo híbrido, foi aproveitado o equacionamento do
mecanismo paralelo, sendo acrescentados apenas os efeitos das molas nas juntas. Estes
efeitos são obtidos a partir da energia potencial das molas, derivadas em respeito das
variáveis angulares e devem ser somados aos coeficientes e :
Onde,
A partir das equações, foram feitos programas e simulações em ambiente
MATLAB e com a ferramenta Simulink.

29
Figura 22: Modelo Dinâmico em Simulink.
A Figura 22 apresenta a implementação das equações dinâmicas no Simulink.
As Figuras 23a, 23b e 23c abaixo detalham os diagramas de blocos da dinâmica de cada
sistema, com suas respectivas componentes de entradas e saídas.

30
(a)
(b)

31
(c)
Figura 23: Modelos dinâmicos de cada sistema em Simulink.
Também foi realizado um script de inicialização de parâmetros, a ser executado
antes da simulação. Este script recebe informações sobre a altura e peso do usuário e
calcula os dados antropométricos necessários a simulação (comprimento, peso e posição
dos centros de massa dos segmentos do corpo). Estes dados são calculados a partir de
proporções comuns observadas na maioria da população.
O fluxograma deste script é apresentado abaixo e sua codificação pode ser vista
no Apêndice B:
Figura 24: Fluxograma do programa.

32
Como valores de entrada de torque para a simulação, utilizamos ondas degrau
para observar o comportamento do sistema em malha aberta quanto à estabilização e
velocidade de resposta da saída.
Através da resposta ao degrau, também serão comparadas as amplitudes das
respostas de cada sistema, de modo a observar qual equipamento possui um melhor
aproveitamento do torque.

33
Capítulo 5 – Resultados
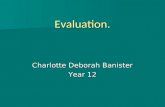
Foram realizadas duas simulações de 60 segundos com os seguintes perfis de
entrada. Abaixo são apresentados os sinais de resposta dos três sistemas e o sinal de
entrada fornecido:
a) Sinal degrau de amplitude 12 no quadril.
Figura 25: Resposta ao degrau de amplitude 12 no quadril.
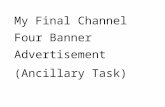
b) Sinal degrau de amplitude 4 no joelho.

34
Figura 26: Resposta ao degrau de amplitude 4 no joelho.
c) Sinal degrau de amplitude 1.2 no quadril.
Figura 27: Resposta ao degrau de amplitude 1.2 no quadril.

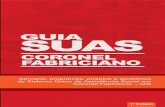
35
d) Sinal degrau de amplitude 0.4 no joelho.
Figura 28: Resposta ao degrau de amplitude 0.4 no joelho.

36
Capítulo 6 – Conclusão
Este estudo levantou algumas das informações necessárias para o projeto e
construção de um equipamento destinado a treino de marcha. Foi observado através dos
trabalhos de outros estudiosos que há muita pesquisa direcionada à reabilitação com uso
de engenharia. Tanto técnicas modernas (como a captura computadorizada de
movimentos) quanto antigas (equações de Lagrange) são utilizadas neste tipo de projeto,
provando que é um campo ainda em expansão.
Das simulações em meio computacional, foi observado que os sistemas
obtiveram respostas diferentes, sendo o dispositivo serial o que apresentou um tempo de
estabilização menor e o dispositivo hibrido o que apresentou o tempo de estabilização
maior. Em contrapartida, o dispositivo serial se estabilizou em torno do valor mais
baixo, enquanto o dispositivo híbrido se estabilizou em torno do valor mais alto. Pode-
se então dizer que o dispositivo serial apresenta uma resposta mais rápida à variação na
entrada, mas demanda mais torque do atuador para realizar movimentos, enquanto o
dispositivo híbrido possui resposta mais lenta, porém demanda menos torque para
atingir uma determinada posição.
Este comportamento era esperado, pois o objetivo da aplicação de uma estrutura
do tipo paralelogramo é justamente eliminar a necessidade de motores pesados que
acarretassem inércias maiores nos elos do mecanismo.
Por fim, através da aplicação de molas, o mecanismo paralelogramo pode aliviar
ainda mais a carga sobre os atuadores (isto dependeria do tipo de exercício executado no
aparelho uma vez que, em movimentos de grande amplitude, a mola também pode
aumentar a demanda de torque sobre o atuador, sendo assim mais apropriada para
movimentos pequenos).
Outra diferença observada entre os sistemas foi a melhor resposta dos modelos
híbrido e paralelogramo ao sinal degrau aplicado ao joelho, em comparação com o
modelo serial. Isto se deve ao fato de estes mecanismos sofrerem menos com efeitos de
acoplamento entre seus dois elos principais, tornando o comportamento destes mais
próximos ao de dois sistemas independentes de um grau de liberdade cada.
Através da observação dos gráficos, pode-se ver ainda que valores de torque
muito altos na entrada levam o sistema a uma saída exponencial, enquanto valores
muito baixos tornam as respostas mais sensíveis a ruídos, o que indica a presença de
uma faixa de operação que depende dos parâmetros do sistema.
Os dados obtidos desta análise em malha aberta devem ser considerados
futuramente para o projeto de um controlador, possivelmente um PID, que melhore a
qualidade das respostas e assim permita a aplicação de uma forma de onda mais
complexa, como o perfil da marcha e de outros exercícios da fisioterapia.
Como projetos futuros, podemos citar o desenvolvimento e implementação do
controlador para os mecanismos estudados ou até mesmo o desenvolvimento de um
novo mecanismo, que englobe as características positivas dos três que foram vistos
neste trabalho. Outros projetos futuros incluem a simulação dos sistemas em ambiente

37
Pro/ENGINEER para determinação dos melhores materiais a serem utilizados, no
sentido de obter um equipamento confiável e ao mesmo tempo acessível. Por fim, viria
a construção de um protótipo físico, com teste em pessoas.

38
Referências Bibliográficas
FILIPPO T.R.M. - "Uma Contribuição da Automação para o Desenvolvimento
de Órteses Ativas para Membros Inferiores".
QUEVEDO A.J.U. - “Desenvolvimento de Dispositivo para Reabilitação de
Membro Inferior com Deficiência Parcial”. FEM/UNICAMP. 2011
SANTOS C.S. - "Proposta de Órtese Exoesquelética Baseada no Mecanismo do
Paralelogramo para Reprodução da Marcha Humana". FEM/UNICAMP. 2009
MAGANHOTO T.F., TORRO T.E.C., REBELO P.M.G., FREITAS T.H.,
CAMPOS A.O., RIBEIRO D.C.L., OLIVEIRA C.S. - "ANÁLISE
CINEMÁTICA E CINÉTICA DA MARCHA NORMAL – UMA REVISÃO
BIBLIOGRÁFICA". Faculdade de Ciências da Saúde (FCS-UNIVAP)
AGRAWAL A., AGRAWAL S.K. - "Design of gravity balancing leg orthosis
using non-zero free length springs", 5 March 2005
PLEDGIE S., BARNER K.E., AGRAWAL S.K. RAHMAN T. - "Tremor
Suppression Through Impedance Control" - IEEE TRANSACTIONS ON
REHABILITATION ENGINEERING, VOL. 8, NO. 1, MARCH 2000
MORISAWA M., YAKOH T., MURAKAMI T., OHNISHI K. - "A Comparison
Study between Parallel and Serial Linked Structures in Biped Robot System"
AGRAWAL S.K., FATTAH A. - "Gravity Balancing of a Human Leg using an
External Orthosis" - Roma/Italia. 2007.
SANTOS R., FUJÃO C. - "Antropometria" - Universidade de Évora - Fevereiro
de 2003.
"Censo 2000" - Disponível em:
<http://www.ibge.gov.br/home/estatistica/populacao/censo2000/populacao/defic
iencia_Censo2000.pdf>. Acessado em 20/05/2011.
"Jornal AACD" - Disponível em <http://www.aacd.com.br/jornal_aacd.pdf>.
Acessado em 20/05/2011.
"Trato Corticoespinhal" - Disponível em
<http://pt.wikipedia.org/wiki/Trato_corticoespinhal>. Acessado em 20/05/2011.
"Tetraplegia e Paraplegia - Causas e complicações em pessoas tetraplégicas e
paraplégicas" - Disponível em
<http://www.copacabanarunners.net/tetraplegia.html>. Acessado em
20/05/2011.
"Coluna Vertebral" - Disponível em
<http://pt.wikipedia.org/wiki/Coluna_vertebral>. Acessado em 21/05/2011.

39
"Linkage (mechanical)" - Disponível em
<http://en.wikipedia.org/wiki/Linkage_(mechanical)>. Acessado em 25/06/2011.
"A Comparison Study between Parallel and Serial Linked Structures in Biped
Robot System" - Disponível em
<http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=00972410>. Acessado
em 25/06/2011.
"Aula 6 – Controladores do tipo Proporcional, Integral e Diferencial" -
Disponível em
<http://www.feng.pucrs.br/~gacs/new/disciplinas/psc_CN/apostilas/Aula6_2007
II.pdf>. Acessado em 23/06/2011.
“Design Guidelines: Proportionality Constants” – Disponível em
<http://www.openlab.psu.edu/tools/proportionality_constants.php >. Acessado
em 05/11/2011.
“Cálculo de momentos de inércia” – Disponível em
<http://www.fisica.ufs.br/egsantana/solido/din_rotacion/inercia/inercia.htm>.
Acessado em 20/10/2011.
“Complete SCI” – Disponível em <http://www.spinal-injury.net/complete-
sci.htm>. Acessada em 02/12/2011.
“Fisioterapia” – Disponível em < http://www.aril.com.br/blog/nosso-
trabalho/programa-de-habilitacao-e-reabilitacao/fisioterapia>. Acessada em
02/12/2011.
VIEL E., ASENCIO G., BLANC Y., CASILLAS J.M., ESNAULT M.,
LAASSEL E.L., MESURE S., PÉLISSIER J., PENNEÇOT G.F., PLAS F.,
TARDIEU C. - "A Marcha Humana, a Corrida e o Salto: Biomecânica,
investigações, normas e disfunções" - 1ª Edição, 2001, Editora Manole - São
Paulo.
PERRY J., - "Análise da Marcha - Volume 1: Marcha Normal" - 1ª Edição,
2005, Editora Manole - São Paulo.
MERIAN J.L. – “Dinâmica” – 1ª Edição, 1976, Livros Técnicos e Científicos
Editora S.A. - Rio de Janeiro/Brasil.
OGATA K., - "Engenharia de controle moderno" - 4ª Edição, 2003, Prentice
Hall - São Paulo.
NEUMANN D.A. - "Cinesiologia do Aparelho Musculoesquelético:
Fundamentos para a Reabilitação Física" - 1ª Edição, 2006, Guanabara Koogan -
Rio de Janeiro.

40
VAUGHAN C.L., DAVIS B.L., O‟CONNOR J.C. - "DYNAMICS OF HUMAN
GAIT" – 2ª Edição, 1992, Kiboho Publishers – Cape Town/África do Sul.
RODACKI A.L.F. - "ANÁLISE DOS FATORES ANTROPOMÉTRICOS EM
BIOMECÂNICA"

41
Apêndice A
Figura 29: Exemplo de um mecanismo para simular o movimento de marcha.
Observando a Figura 29, vemos o esquema de um sistema de dois graus de
liberdade (coordenadas generalizadas) e que pode ser usado no dispositivo
proposto pelo projeto.
O próximo passo após o desenho do mecanismo seria a obtenção das equações
de movimento do sistema. Supondo que haverá atuadores para controlar os ângulos e
, usaremos a formulação das equações de Lagrange:
Onde:
L é a função Lagrangeana, calculada a partir da energia cinética T e da energia
potencial V do sistema. Estes termos dependem dos valores de massa do sistema.
Assim, as equações de movimento irão variar em conformidade com as propriedades do
material escolhido para construção do dispositivo, bem como as características físicas
do usuário (massa, centros de gravidade). As equações de movimento terão a seguinte
forma:
Depois de calculadas as equações de movimento, aplica-se a elas a transformada
de Laplace para então obtermos as funções de transferência que representam o sistema.
Temos agora nossas plantas a serem controladas, que terão o seguinte formato:

42
Usaremos como sinal de entrada do sistema os valores esperados dos ângulos da
perna durante uma marcha normal. Estes valores deverão seguir a seqüência das fases
da marcha descrita no Capítulo 3.
Figura 30: Ângulos das juntas da perna durante a marcha (BANALA, KULPE e
AGRAWAL, 2007).

43
Apêndice B
Segue abaixo o código a ser executado para inicialização dos parâmetros da
simulação.
% % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % Universidade Estadual de Campinas % % ES952 - Trabalho de Graduação II % % Departamento de Projetos Mecânicos % % Orientador: João Maurício Rosário % % Programador: Renato Suekichi Kuteken ra: 046149 % % Data: 9/11/2011 % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
close all clear all clc
% Gravidade: g = 9.81;
% Informações do usuário: Mtotal = input('Digite o peso do usuário(kg):\n '); Htotal = input('\nDigite a altura do usuário(m):\n '); GBS = input('\nDeseja movimento de Senóide(0), Marcha(1) ou
Degrau(2)?\n');
% Cálculo das massas dos segmentos das pernas, proporcionais a massa
total, % segundo média de dados coletados empiricamente: Mcoxa = .103*Mtotal; Mcanela = .043*Mtotal; Mperna = Mcoxa+Mcanela;
% Cálculo dos comprimentos dos segmentos das pernas, proporcionais a
altura % total, segundo média de dados coletados empiricamente: Hcoxa = .245*Htotal; Hcanela = .246*Htotal; Hperna = Hcoxa+Hcanela;
% Cálculo dos centros de massa (medida proximal) dos segmentos das
pernas, % proporcionais aos comprimentos dos mesmos segmentos, segundo média
de % dados coletados empiricamente.: CMcoxa = .43*Hcoxa; CMcanela = .43*Hcanela;
% % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
% % % % Modelo Dinâmico do Aparelho Serial: % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
% % % Lc1 = CMcoxa; Lc2 = CMcanela; L1 = Hcoxa;

44
L2 = Hcanela; M1 = Mcoxa; M2 = Mcanela; Mp2 = .5; % Considerando atuadores de massa = .5kg nas juntas; Mp1 = .5; % Considerando atuadores de massa = .5kg nas juntas;
lc1=Lc1; lc2=Lc2; l1=L1; l2=L2; m1=M1; m2=M2; mp1=Mp1; mp2=Mp2;
% Cálculo dos momentos de inércia das barras do sistema: Il1 = (1/12)*M1*(L1^2) + M1*((L1/2)^2); Il2 = (1/12)*M2*(L2^2) + M2*((L2/2)^2);
il1=Il1; il2=Il2; I1 = Il1; I2 = Il2;
% Constantes a serem utilizadas no modelo: c1 = M1*(Lc1^2) + Il1 + Mp2*(Lc1^2) + Il2 + M2*(Lc2^2) + M2*(L1^2); c2 = M2*L1*Lc2; c3 = Il2 + M2*(Lc2^2); c4 = g*M2*Lc2; c5 = g*M2*L1 + g*Lc1*M1 + g*L1*Mp1;
% O modelo foi implementado no Simulink, utilizando as % constantes acima como parâmetros.
% % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
% % % % Modelo Dinâmico do Aparelho Paralelo: % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
% % % %158
S1 = .433*L1; S2 = .433*L2; Lca1 = (L1-S1)/2; Lca2 = S2/2; Ma1 = .13; Ma2 = .08; Ila1 = (1/12)*Ma1*((L1-S1)^2) + Ma1*(((L1-S1)/2)^2); Ila2 = (1/12)*Ma2*(S2^2) + Ma2*((S2/2)^2);
Ia1=Ila1; Ia2=Ila2;
s1=S1; s2=S2; lca1=Lca1; lca2=Lca2; ma1=Ma1; ma2=Ma2; ila1=Ila1;

45
ila2=Ila2;
% % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
% % % % Modelo Dinâmico do Aparelho Paralelo com Molas: % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
% % %
% D1 = L1-S1; % D2 = .164;;
D1 = .164; % valor retirados de Agrawal (p152) D2 = .2;
d1=D1; d2=D2;
M = (Mp1+Mp2+M1+M2+Ma1+Ma2)*2;
K1 = S1*M*g/D1; K2 = M*g/(D1*D2);
m=M; k1=K1; k2=K2;
Ra = 3.18; L=.53/(10^3);
% % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
% % % % Geração da forma de onda que caracteriza a marcha: % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
% % %
% Ângulos do Joelho: yj = [5 18 3 40 0 5 18 3 40 0 5 18 3 40 0 5 18 3 40 0]; xj = [0 0.15 0.4 0.62 0.97 1 1.15 1.4 1.62 1.97 2 2.15 2.4 2.62 2.97 3
3.15 3.4 3.62 3.97];
yj = yj*(.0175);
% Ângulos do Quadril: yq = [20 0 -10 0 25 20 0 -10 0 25 20 0 -10 0 25 20 0 -10 0 25]; xq = [0 0.38 0.5 0.60 .84 1 1.38 1.5 1.60 1.84 2 2.38 2.5 2.60 2.84 3
3.38 3.5 3.60 3.84];
yq = yq*(.0175);
aJ = spline(xj,[0 yj 0]); aQ = spline(xq,[0 yq 0]);
A1 = linspace(0,3,1000000); A = A1*10; figure(); plot(A1,ppval(aJ,A1)); xlabel('Porcentagem do CM')

46
ylabel('Ângulo do Joelho')
figure(); plot(A1,ppval(aQ,A1)) xlabel('Porcentagem do CM') ylabel('Ângulo do Quadril')
% % FIM DO PROGRAMA. %
Ao final da execução, este programa também gera o perfil dos ângulos esperados
em um movimento de marcha, segundo a literatura, para o quadril e para o joelho. Estes
dados podem ser inseridos futuramente em um sistema devidamente controlado.
Figura 31: Ângulos do joelho ao longo do ciclo da marcha.
Figura 32: Ângulos do quadril ao longo do ciclo da marcha.