TEKNILLINEN KORKEAKOULU Sähkö- ja...
93
TEKNILLINEN KORKEAKOULU Sähkö- ja tietoliikennetekniikan osasto Pasi Suvikunnas Monielementtisten antennirakenteiden vertailu WCDMA-järjestelmässä Diplomityö, joka on jätetty opinnäytteenä tarkastettavaksi diplomi-insinöörin tutkintoa varten Espoossa 18.6.1999 Työn valvoja Professori Pertti Vainikainen Työn ohjaaja Tekniikan tohtori Jorma Lilleberg
Transcript of TEKNILLINEN KORKEAKOULU Sähkö- ja...
TEKNILLINEN KORKEAKOULUSähkö- ja tietoliikennetekniikan osasto
Pasi Suvikunnas
Monielementtisten antennirakenteiden vertailuWCDMA-järjestelmässä
Diplomityö, joka on jätetty opinnäytteenä tarkastettavaksi diplomi-insinöörintutkintoa varten Espoossa 18.6.1999
Työn valvoja
Professori Pertti Vainikainen
Työn ohjaaja
Tekniikan tohtori Jorma Lilleberg

2
TEKNILLINEN KORKEAKOULU DIPLOMITYÖN TIIVISTELMÄ
Tekijä: Pasi Suvikunnas
Työn nimi: Monielementtisten antennirakenteiden vertailu WCDMA- järjestelmässä
Päivämäärä: 18.6.1999 Sivumäärä: 93
Osasto: Sähkö- ja tietoliikennetekniikan osasto
Professuuri: Radiotekniikka Koodi:S-26
Työn valvoja: Professori Pertti Vainikainen
Työn ohjaaja: Tekniikan tohtori Jorma Lilleberg
Työssä kehitettiin menetelmää monielementtisen antennirakenteen optimointiin laaja-kaistaisessa koodijakoisessa monikäyttömenetelmässä (WCDMA). Kanavatilojen luomi-seksi erilaisissa etenemisympäristöissä käytettiin Wienin teknillisessä korkeakoulussa ke-hitettyä uplink-suuntamallia. Kyseisessä mallissa päätelaitteet ovat tasaisesti jakautuneitavalitun kokoisessa tukiasemasolussa määrättyyn sektoriin. Lisäksi solun alueelle lisätytsirottajat noudattavat valittua jakaumaa. Erilaisten antennirakenteiden vertailun kriteerinäkäytettiin vastaanotetun signaalin eri monitiekomponenteista muodostetusta matriisistakahdella eri menetelmällä johdettua tunnuslukua. Toinen menetelmä perustuu matriisinominaisarvoihin ja toinen menetelmä matriisin riveistä/sarakkeista muodostettujen vek-torien pituuksiin. Tunnusluvun määriteltiin olevan sitä pienempi mitä optimaalisempi onantenni määrätyssä etenemisympäristössä.
Menetelmän testaamiseksi vertailtiin lineaarista ryhmää mikrosolussa elementtimäärillä1-8. Todettiin antennin ominaisuuksien paranevan elementtimäärän kasvaessa mikä onoletettua. Seuraavaksi vertailtiin kahta erilaista antennirakennetta kahdessa erilaisessaetenemisympäristössä. Antennirakenteina käytettiin lineaarista ja ympyrän kaaren muo-toista kahdeksanelementtistä antenniryhmää. Etenemisympäristöinä käytettiin makro- jamikrosolua kaupunki/esikaupunkiympäristössä. Antenniryhmien ominaisuuksien välilleei saatu havaittavaa eroa eri etenemisympäristöissä simuloinneissa käytetyillä simu-lointimäärillä. Lopuksi vertailtiin tunnusluvun laskemisessa käytettyä kahta eri menetel-mää. Todettiin kummankin menetelmän soveltuvan yhtä hyvin vertailuun.
Todettiin menetelmän sovetuvan jonkinasteiseen antennien vertailuun, joten se luo poh-jan optimointimenetelmän kehittämiselle jatkossa. Tulevaisuudessa on tarkoitus kehittääka-navamallista riippumaton ohjelma, jossa voidaan vaihdella eri antennirakenteita. Näinvoidaan optimointiin käyttää sekä mitattua että simuloitua dataa.
Avainsanat: WCDMA, Antenniryhmä, suuntamalli, korrelaatio, optimointi

3
HELSINKI UNIVERSITY OF TECHNOLOGY ABSTRACT OF THEMASTERS’S THESIS
Author: Pasi Suvikunnas
Name of the thesis: Comparison of multielement antenna arrays in WCDMA- system
Date: 18.6.1999 Number of pages: 93
Department: Department of Electrical and Communications Engineering
Professorship: Radio Engineering Code: S-26
Supervisor: Professor Pertti Vainikainen
Instructor: D. Tech Jorma Lilleberg
A new method was developed for optimization of multielement antenna array inwideband code division multiple access system (WCDMA). To optimize differentantenna arrays two different figures of merit were developed based on correlation matrixformed by different multipath components. To create different channel conditions ageometry based stochastic channel model was used. In this model mobile stations arerandomly placed within a cell in a certain sector. Different scatterers are placed within thecell based on some certain distribution.
The new methods were tested by comparing linear array with different element numbers(1 to 8) in a microcell environment. Figure of merit was noticed to depend to elementamount. Based on this comparison the method work properly. Two different antennaconfigurations were also compared in macrocell and microcell environments. Testedantenna configurations were a eight element linear and semi-circular array. Figure ofmerit (with both methods) seemed to be almost the same for the antennas in differentpropagation environments. Comparison between two different methods was also done.Correlation between these methods was good.
The new comparison method was noticed to be useful for antenna array comparisons.There are still some unsolved problems in this method. For example antennaconfiguration can be separated from channel model. These problems are a subject offuture work.
Keywords: WCDMA, Antenna array, directional channel model, correlation,optimization

4
Alkulause
Tämä diplomityö on tehty Teknillisen korkeakoulun Radiolaboratorion Radiotietolii-kenneinstituutin (IRC) RAVE-projektissa.
Ensimmäiseksi haluan kiittää valvojaani professori Pertti Vainikaista hyvistä neuvoistatyöhöni liittyen. Valvojaani Jorma Lillebergiä kiitän hyvästä työn aiheesta. Wieninteknillistä korkeakoulua haluan kiittää työssä käytetystä kanavamallista ja Juha Laurilaakanavamalliin liittyvistä neuvoista. Lisäksi haluan kiittää koko radiolaboratorionhenkilökuntaa, sukulaisiani ja erityisesti tyttöystävääni Merjaa henkisestä tuesta työnaikana.
Espoon Otaniemessä 18.6.1999
Pasi Suvikunnas

5
Sisällysluettelo
ALKULAUSE..........................................................................................................................................4
SISÄLLYSLUETTELO .........................................................................................................................5
SYMBOLILUETTELO..........................................................................................................................7
LYHENNELUETTELO .......................................................................................................................10
1 JOHDANTO.......................................................................................................................................15
2 RADIOKANAVA...............................................................................................................................17
2.1 PERUSILMIÖT .................................................................................................................................172.2 MONITIE-ETENEMINEN...................................................................................................................182.3 DETERMINISTISEN KANAVAN SYSTEEMIFUNKTIOT.........................................................................192.4 SATUNNAINEN AIKAVARIANTTI KANAVA.......................................................................................202.5 SUUNTAMALLIT .............................................................................................................................21
2.5.1 Kanavamallit .........................................................................................................................212.5.2 Suuntatiedon sisältämät kanavamallit..................................................................................212.5.3 Geometriaan perustuva stokastinen kanavamalli ................................................................26
3 MONIELEMENTTIRAKENTEIDEN KÄYTTÖ RADIOJÄRJESTELMISSÄ .........................30
3.1 ERILAISET ANTENNIELEMENTTIRAKENTEET...................................................................................303.1.1 Perinteiset antennit................................................................................................................303.1.2 Mikroliuska-antennit.............................................................................................................30
3.2 ERILAISET ANTENNIRAKENTEET ....................................................................................................313.2.1 Antenniparametrit .................................................................................................................313.2.2 Antenniryhmät.......................................................................................................................343.2.3 Antennijoukot ........................................................................................................................353.2.4 Synteesimenetelmät ...............................................................................................................36
3.3 TEKNISET RATKAISUT HÄIPYMÄN TORJUMISEKSI...........................................................................403.3.1 Vastaanottotoiste ...................................................................................................................403.3.2 Yhdistelymenetelmät..............................................................................................................423.3.3 Lähetystoiste ..........................................................................................................................42
3.4 ADAPTIIVISET ANTENNIT................................................................................................................433.4.1 Analoginen keilanmuokkaus ................................................................................................443.4.2 Digitaalinen keilanmuokkaus ...............................................................................................443.4.3 Adaptiiviset keilanmuodostustavat CDMA-järjestelmässä...................................................47
4 KANAVAJAKOJÄRJESTELMÄT .................................................................................................50
4.1 PERINTEISET MENETELMÄT............................................................................................................504.1.1 Taajuusjakoinen monikäyttömenetelmä FDMA ..................................................................504.1.2 Aikajakoinen monikäyttömenetelmä TDMA .......................................................................51
4.2 LAAJAKAISTAINEN KOODIJAKOINEN MONIKÄYTTÖMENETELMÄ....................................................524.2.1 Koodijakoinen monikäyttömenetelmä CDMA......................................................................524.2.2 Laajakaistainen CDMA (WCDMA)......................................................................................53
4.3 PAIKKAJAKOINEN MONIKÄYTTÖMENETELMÄ SDMA....................................................................564.3.1 Soluihin perustuva SDMA ....................................................................................................564.3.2 Keilanmuodostukseen perustuva SDMA ..............................................................................57
4.4 RAKE-VASTAANOTIN....................................................................................................................584.5 MONEN KÄYTTÄJÄN ILMAISU MUD ..............................................................................................604.6 WCDMA:N JA SDMA:N YHTEISKÄYTTÖ ......................................................................................62

6
5 ANTENNIRAKENTEEN OPTIMOINTIMEMETELMÄ.............................................................63
5.1 TUTKIMUKSESSA KÄYTETYT MENETELMÄT ...................................................................................635.1.1 Tutkimuksen järjestelmäympäristö.......................................................................................635.1.2 Vertailukriteerit .....................................................................................................................69
5.2 ANTENNIRAKENTEET .....................................................................................................................725.3 ETENEMISKANAVAT.......................................................................................................................73
5.3.1 Makrosolu..............................................................................................................................735.3.2 Mikrosolu...............................................................................................................................74
6 TUTKIMUSTULOKSET ..................................................................................................................75
6.1 OPTIMOINTIMENETELMÄN TESTAUS...............................................................................................756.2 LINEAARISEN ANTENNIN TUTKIMINEN ...........................................................................................766.3 ANTENNIRYHMIEN VERTAILU ........................................................................................................776.4 TULOSTEN POHDINTA.....................................................................................................................82
7 JOHTOPÄÄTÖKSET .......................................................................................................................84
LÄHDELUETTELO.............................................................................................................................85
LIITTEET..............................................................................................................................................90

7
Symboliluettelo
2a apertuurin pituusai virtakerroinaq koodisana
Ae antennin sieppauspintaAi kanavan vasteAm säteilyamplitudib kanavaan lähetetty datasignaalibn virta-amplitudiBs kaistanleveysCi käyttäjien signaalien amplituditCr radiokapasiteettid antenniryhmän elementtien välinen etäisyysD ur( ) suuntaavuusEb bittiä kohti vastaanotettu energia
E r sähkökenttäf u( ) säteilyfunktioF FouriermuunnosF −1 käänteinen Fouriermuunnos
F ur( ) vektorifunktion normalisoitu amplitudiG vahvistusGb prosessointivahvistusGr vastaanottoantennin vahvistusGt lähetysantennin vahvistush antennin tehollinen pituusvektorihBS tukiaseman läheisyydessä sijaitsevien sirottajien aiheuttama
impulssivastehkauko kaukosirottajasta ja/tai heijastajasta aiheutuva impulssivastehLOS näköyhteyskomponentin aiheuttama impulssivastehMS päätelaitteen läheisyydessä sijaitsevan sirottajan aiheuttama
impulssivasteh t( , )τ impulssivasteH f( , )ν siirtofunktioI MUU viereisten solujen mobiilien aiheuttamat häiriötIOMA oman solun mobiilien aiheuttamat häiriötJ Jacobin determinanttiJ r( ), virtafunktiok aaltolukuki vaimennuskerroinK käyttäjien lukumääräKs solun monikäyttökerroinL monitiekomponenttien lukumääräM datapaketin symbolien lukumäärä

8
Mc korrelaatiomatriisiM f taajuuskanavien lukumäärä
ni kohinavektoriN kanavatilojen lukumääräN f samaa taajuutta käyttävien mobiilien määrä solussa
N 0 valkoinen kohina
N ut r( ) vektorifunktiop r1 ( ) vakiojakaumap r2 ( ) Rayleigh-jakaumap r3 ( ) Gaussin jakaumaP tehoPfar kaukosirottajien keskimääräinen teho
Plocal paikallisten sirottajien keskimääräinen tehoPLOS näköyhteyskomponentin keskimääräinen tehoPr vastaanotettu tehoPrad antennin säteilemä kokonaistehoPt lähetetty tehoPtotal keskimääräinen vastaanotettu teho
P projektiodyadiq koodin pituusr antennien välinen etäisyysr t( ) vastaanottimeen saapuva signaalirD samaa taajuuskanavaa edustavien solujen välinen etäisyys
r i paikkavektoriR ympyränmuotoisen solun sädeRa antennin resistiivinen impedanssiRh antennin häviötR ms bsmax_ _ maksimietäisyys tukiaseman ja päätelaitteen välillä
R scatterermax_ lähi- tai kaukosirottajaympyrän tehollinen säde
RMS tukiaseman ja päätelaitteen välinen etäisyysR ms bsmax_ _ tukiasemasolun säde
R ms bsmin_ _ tukiaseman ja päätelaitteen välinen minimietäisyys
Rr säteilyhäviöt
R kovarianssimatriisis sivukeilatasoS tehotiheysSi koodisanojen matriisiSn solun sektoreiden lukumääräSn i( )θ määrätyssä kulmassa vastaanotettu signaaliSt viivehajeSϕ kulmahaje
S( , )τ ν dopplerhajefunktioS( )γ antenniryhmän sivukeilatasoSF hajoituskerroin
9
T f t( , ) aikavariantti siirtofunktioT xm( ) Tsebyshevin polynomiT( )γ normalisoitu ryhmävahvistusu suuntaparametri
ur säteilysuuntawk kompleksinen painokerroinw t( ) ulostulon kompleksinen verhokäyräW f( ) ulostulon spektri
W ur( ) antennin suuntaan ur säteilemä tehotiheys avaruuskulmaa kohtixα tunnuslukujen α keskiarvo
X a antennin reaktiivinen impedanssiz t( ) sisäänmenon kompleksinen verhokäyrä
Z ' RAKE-vastaanottimeen saapuva kokonaistehoZa antennin impedanssiZ f( ) sisäänmenon spektriZm RAKE-vastaanottimen korrelaattoreiden ulostulot
α antennin hyvyyttä kuvaava tunnuslukuβ MUD-hyötysuhdeγ säteilykuvion nollakohtaδ vaihesiirtoηp antennin hyötysuhde
λ aallonpituusµ permeabiliteetti∆ν taajuuden diskretointiväliσα tunnuslukujen α keskiarvo
σ αx tunnuslukujen α keskiarvon keskivirhe
σ τ ν( , ) sirontafunktio∆τ ajan diskretointiväliτ saaapumisviiveϕ tarkastelukulmaϕ 3dB antenniryhmän kolmen dB:n keilanleveys∆θ3dB puolen tehon keilanleveys∆θ0 keilanleveysΩ avaruuskulma
10
Lyhenneluettelo
ACTS Advanced Communication Technologies and ServicesEdistykselliset tietoliikenneteknologiat ja palvelut
ADC Analog-to-Digital ConverterAnalogia-digitaalimuunnin
AMPS Advanced Mobile Phone SystemEdistyksellinen matkapuhelinjärjestelmä
AOA Angle-of-ArrivalTulokulma
APS Angular Power SpectrumKulmatehospektri
AS Antenna SelectionAntennin valinta
BCCH Broadcast Control CHannelLähetyksen ohjauskanava
BER Bit Error RatioBittivirhesuhde
BS Base StationTukiasema
CDMA Code Division Multiple AccessKoodijakoinen monikäyttömenetelmä
CPCCH Common Physical Control ChannelYhteinen fyysinen ohjauskanava
CT Cordless TelephoneLangaton puhelin
DAB Digital Audio BroadcastingDigitaaliradio
DBF Digital Beam FormingDigitaalinen keilanmuodostus
DL DownlinkTukiaseman lähetyssuunta (alalinkkisuunta)
DPCCH Dedicated Physical Control ChannelFyysinen ohjauskanava

11
DPCH Dedicated Physical CHannelFyysinen kanava
DPDCH Dedicated Physical Data ChannelFyysinen datakanava
DS Direct SequenceSuorahajoitus
ETSI European Telecommunications Standards InstituteEuroopan tietoliikennestandardointi-instituutti
FCH Frame Control HeaderKehyksen ohjaustunniste
FDD Frequency Division DuplexTaajuusjakodupleksi
FDMA Frequency Division Multiple AccessTaajuusjakoinen monikäyttömenetelmä
FFT Fast Fourier TransformNopea Fouriermuunnos
FH Frequency HoppingTaajuushyppely
FIR Finite Impulse ResponseÄärellinen impulssivaste
FSW Frame Syncronisation WordKehyssynkronointisana
GSCM Geometry based Stochastic Channel ModelGeometriaan perustuva stokastinen kanavamalli
GSM Global System of Mobile communicationToisen sukupolven matkapuhelinstandardi
HIPERLAN High Performance Radio Local Area StandardRadiolähiverkkostandardi
LMS Least Mean Square
LMMSE Linear Minimum Mean Squared ErrorLineaarinen minimoitu keskineliövirhe
LOS Line Of SightNäköyhteys

12
LTI Linear Time InvariantLineaarinen aikariippumaton
LTV Linear Time VariantLineaarinen aikariippuva
MAI Multiple-Access InterferenceMonikäyttöhäiriö
MS Mobile StationPäätelaite
MUD Multi User DetectionMonen käyttäjän ilmaisu
MUX MultiplexerMultiplekseri
OFDMA Orthogonal Frequency Division Multiple AccessOrtogonaalinen taajuusjakoinen monikäyttömenetelmä
OTD Orthogonal Transmit DiversityOrtogonaalinen lähetystoiste
PC Power ControlTehonsäätö
PCCCH Physical Common Control ChannelFyysinen yhteinen ohjauskanava
PDF Probability Density FunctionTodennäköisyystiheysfunktio
PDP Power Delay ProfileTehoviiveprofiili
PICH PIlot CHannelPilottikanava
PN Pseudo NoiseValekohina
QPSK Quadriphase-Shift KeyingQPSK-modulaatio
RDBF Receiver Digital Beam FormingVastaanottimen digitaalinen keilanmuodostus
RF Radio Frequency

13
Radiotaajuus
RLS Recursive Least Square
Rx ReceiverVastaanotin
SCH Synchronisation CHannelSynkronointikanava
SCM Sample Covariance Matrix
SDMA Spatial Division Multiple AccessPaikkajakoinen monikäyttömenetelmä
SFIR Spatial Filtering for Interference ReductionTilajakoinen suodatus häiriöiden alentamiseen
SINR Signal-to-Interference-plus-Noise RatioSignaali-häiriö ja kohinasuhde
SIR Signal-to-Interference RatioSignaali-häiriösuhde
SMI Sample-Matrix Inversion
SNR Signal-to-Noise RatioSignaali-kohinasuhde
SOHO SOft Hand OverPehmeä kanavanvaihto
STD Selection Transmit DiversityValinnainen lähetystoiste
TFI Transport Format IndicatorLähetysmuodon indikaattori
TPC Transport Power ControlLähetystehon säätö
Tx TransmitterLähetin
TDMA Time Division Multiple AccessAikajakoinen monikäyttömenetelmä
TSTD Time Switched Transmission DiversityAikakytkentäinen lähetystoiste

14
TDBF Transmitter Digital Beam FormingLähettimen digitaalinen keilanmuodostus
TDD Time Division DuplexAikajakodupleksi
UHF Ultra High Frequency
UL UplinkPäätelaitteen lähetyssuunta (ylälinkkisuunta)
UMTS Universal Mobile Telecommunications SystemKolmannen sukupolven matkapuhelinstandardi
UTRA UMTS Terrestrial Radio AccessKolmannen sukupolven matkapuhelinstandardin maailmanlaajuinenradiojär-jestelmä
WCDMA Wideband Code Division Multiple AccessLaajakaistainen Koodijakoinen monikäyttömenetelmä
WTDMA Wideband Time Division Multiple AccessLaajakaistainen Aikajakoinen monikäyttömenetelmä

15
1 Johdanto
Useita tutkimusohjelmia on käynnistetty viime vuosina tavoitteena matkapuhelintentutkimus ja kehittäminen. Laajakaistaisen tiedonsiirron tarve on ilmaantunut halusta tar-jota eritasoisia multimediapalveluja. Laajakaistainen tiedonsiirto mahdollistaa entistäparempitasoisen puheen, kuvan ja eritasoisten datapalvelujen lähetyksen ja vastaanoton.Eurooppalainen tutkimusohjelma ACTS (ACTS = Advanced Communication Techno-logies and Services) on eräs käynnistetyistä tutkimusohjelmista. Se aloitettiin vuoden1995 lopussa. Tämän tutkimusohjelman puitteissa kehitetään uutta matkapuhelinstan-dardia. Kyseiseen kolmannen sukupolven matkapuhelinjärjestelmään UMTS (UMTS =Universal Mobile Telecommunications System) on ehdotettu kahta erilaista monikäyt-tömenetelmää. Ehdokkaat ovat laajakaistainen aikajakoinen monikäyttömenetelmäWTDMA (WTDMA = Wideband Time Division Multiple Access) ja laajakaistainenkoodijakoinen monikäyttömenetelmä WCDMA (WCDMA = Wideband Code DivisionMultiple Access). WCDMA sai parhaan kannatuksen Joulukuussa 1997 ETSI:n (Euro-pean Telecommunications Standards Institute) järjestämässä äänestyksessä. TätenWCDMA on vahvin eurooppalainen ehdokas uudeksi monikäyttömenetelmäksi[1].
Siirtyvässä tietoliikenteessä radiokanavan tila vaihtelee ajan ja paikan funktiona voi-makkaasti. Radiokanavan nopea vaihtelu johtuu päätelaitteen liikkeestä ja siirtyvässätietoliikenteessä tyypillisestä monitie-etenemisestä. Monitie-eteneminen taas aiheutuuradiotiellä olevista rakennuksista ja maaston muodoista. Suoraan Maxwellin yhtälöihinperustuva radiokanavan mallintaminen on tästä johtuen matemaattisesti vaikeaa. Erilai-sia deterministisiä ja stokastisia kanavamalleja on kehitetty siirtyvän tietoliikenteen ete-nemisen mallintamiseksi.
Siirtyvä tietoliikenne on lisännyt antenniryhmien kehittämisen tarvetta. Adaptiivisillaantenneilla saavutetaan solukkoradiojärjestelmään lisää kapasiteettia ja parempi erottelukäyttäjien välille. Adaptiivisten antennien myötä on tullut tarve suuntatiedon sisältävienkanavamallien eli suuntamallien kehittämiseen. Kyseisten mallien avulla voidaan testataerilaisten antenniryhmien toimivuutta erilaisissa kanavaympäristöissä. Näin säästytäänosittain hankalien mittausjärjestelyiden rakentamiselta. Tosin mittauksia tarvitaan mal-lien kehittämisessä ja luotettavuuden testaamisessa.
Tämän tutkimuksen tarkoituksena oli monielementtisen antennirakenteen optimointiinsoveltuvan testimenetelmän kehittäminen WCDMA-järjestelmään. Eri kanavatilojenluomiseen käytetään Wienin teknillisessä korkeakoulussa kehitettyä uplink-suuntamal-lia. Antennien vertailun kriteerinä käytetään vastaanotetun signaalin eri monitiekompo-nenteista muodostettua korrelaatiomatriisia. Menetelmän testaamiseksi vertaillaan line-aarista ja ympyrän kaaren muotoista antenniryhmää. Etenemisympäristöinä käytetäänkaupunkialueella sijaitsevaa makrosolua ja mikrosolua.
Työn jaottelu on seuraava. Kolmessa ensimmäisessä luvussa käsitellään teoriaa. Toi-sessa luvussa käsitellään radiosignaalin etenemistä ja suuntamalleja. Kolmannessa lu-vussa keskitytään monielementtisiin antenneihin. Neljännen luvun aiheena ovat erilaisetmonikäyttömenetelmät, joissa keskitytään lähinnä koodijakoiseen monikäyttömenetel-mään CDMA (CDMA = Code Division Multiple Access) ja paikkajakoiseen moni-käyttömenetelmään SDMA (SDMA = Spatial Division Multiple Access). Viidennessäluvussa kuvataan työssä käytetty suuntamalli. Kuudes luku koostuu tuloksista ja seitse-männessä luvussa on tuloksista tehdyt johtopäätökset.

16
2 Radiokanava
Radiokanavalla tarkoitetaan tässä tapauksessa tukiaseman ja päätelaitteen välistä radio-tietä. Radiokanavan mallintaminen on matemaattisesti hankalaa, koska se on useam-man eri tekijän funktio. Radiokanava muuttuu taajuuden, ajan ja paikan funktiona. Täs-sä luvussa käsitellään aluksi signaalin etenemiseen vaikuttavia perusilmiöitä. Tämänjälkeen käsitellään monitie-etenemistä ja determinististä kanavaa kuvaavia systeemi-funktioita. Lopuksi keskitytään suuntamalleihin, joita tarvitaan adaptiivisten antennienyhteydessä.
2.1 Perusilmiöt
Lähettimen ja vastaanottimen välinen radioyhteys noudattaa ideaalitapauksessa Friisinkaavaa [2]
P G Gr
Pr r t t=
λπ4
2
, (2.1)
jossa Pt on lähetetty tehoPr on vastaanotettu tehoGt on lähetysantennin vahvistusGr on vastaanottoantennin vahvistusλ on aallonpituusr on antennien välinen etäisyys.
Kaavasta (2.1) voidaan havaita signaalin vaimennuksen olevan etäisyyden ja aallon-pituuden funktio. Mitä pienempi aallonpituus ja mitä suurempi etäisyys, sitä enemmänsignaali vaimenee määrätyllä yhteysvälillä. Todellisuudessa tilanne ei kuitenkaan olenäin yksinkertainen johtuen eri tekijöistä. Yhteysvaimennus on matkapuhelinliiken-teessä huomattavasti suurempi kuin Friisin kaavassa esiintyvä vapaan tilan vaimennus.Yleensä keskimääräinen vaimennus lasketaan jonkun empiirisen kaavan perusteella,jonka parametrit riippuvat taajuudesta, antennien korkeuksista ja käyttöympäristöstä.Tilanne on erilainen kaupunki-, esikaupunki- ja maaseutuympäristössä. Tämä on karkeajako erilaisille etenemisympäristöille, ja luonnollisesti ympäristö voi olla myös näidensekoitus. Etenemisympäristön mukaan erilaiset rakennukset ja maaston muodot vai-kuttavat tilanteeseen. Ilmakehän olosuhteilla ei ole suurta vaikutusta siirtyvään tietolii-kenteeseen toisin kuin esimerkiksi satelliittitietoliikenteeseen.
Ensimmäiseksi kuvataan muutamia ilmiöitä, jotka vaikuttavat radiosignaalin etenemi-seen radiotiellä. Signaalin kohdatessa epätasaisen pinnan tai radiotiellä olevia aallonpi-tuuteen nähden pieniä partikkeleita tapahtuu sirontaa, eli signaali hajoaa eri suuntiin.Vesipisaraa voidaan esimerkiksi pitää pienenä antennina, joka säteilee tehoa eri suun-tiin. Usean sironnan johdosta osa signaalin tehosta menetetään epäkoherenttiin muo-toon. Epäkoherentti signaali joko sisältää monta taajuutta tai sen polarisaatio muuttuujatkuvasti[2]. Koherentilla kentällä tarkoitetaan vastaavasti yhtä taajuutta sisältävää elimonokromaattista aaltoa, jolla on joka pisteessä määrätty polarisaatio.

17
Radiosignaalin taipumista tapahtuu useasta eri syystä. Epähomogeenisessa avaruudessaradiosignaali taipuu määrätyn lain mukaisesti. Signaalin kohdatessa esimerkiksi terävänreunan tai kaarevan mäen, joka on Fresnelin ellipsoidin sisäpuolella, puhutaan veitsen-terädiffraktiosta tai vastaavasti pyöreän esteen diffraktiosta[2].
Signaalin kohdatessa tasaisen pinnan tapahtuu taittuminen. Toisin sanoen materiaalinpermittiivisyyden vaihtuessa toiseksi signaali taittuu Snellin lain mukaan kahden aineenrajapintaan saapuessaan joko pinnan normaalista poispäin tai pinnan normaaliin päin.Tasaisesta pinnasta tapahtuu myös heijastuminen, jossa tulokulma on sama kuin heijas-tuskulma. Signaalin törmätessä esteeseen se siis osittain heijastuu ja osittain läpäisee ra-japinnan. Signaalin läpäistessä kyseisen materiaalin se luovuttaa osan energiastaan sii-hen. Tätä ilmiötä kutsutaan absorboitumiseksi.
2.2 Monitie-eteneminen
Siirtyvän liikenteen kanava on luonteeltaan monitiekanava erilaisten esteiden aiheutta-mien heijastusten vaikutuksesta johtuen. Yhdessä heijastuksessa heijastimen paikka voi-daan määrittää jos tiedetään Dopplertaajuus, signaalin viive, päätelaitteen nopeusvektorija signaalin tulokulma. Dopplertaajuus riippuu signaalin taajuudesta, lähettimen ja vas-taanottimen välisestä suhteellisesta nopeudesta sekä nopeusvektorin ja tulevan aallonvälisestä kulmasta. Signaalia kutsutaan laajakaistaiseksi, jos signaalin monitiekompo-nenttien viiveet ovat paljon suurempia kuin kaistanleveyden käänteisluku. Siirtyvässätietoliikenteessä, jossa näköyhteyskomponentti saattaa puuttua kokonaan, tarvitaan kei-noja monitiekomponenttien havaitsemiseksi ja keräämiseksi.
Signaalin häipyminen on jaettu eri luokkiin johtuen signaalin kaistanleveydestä ja radio-tiellä sijaitsevista esteistä. Tasaisessa häipymässä kanavan vaimennus on vakio, ja vai-hesiirto on lineaarinen funktio taajuudesta koko kaistanleveydellä [3]. Toisin sanoen eritaajuudet häipyvät melkein samalla tavalla kun tarkastellaan kapeaa taajuuskaistaa. Ta-sainen häipymä on ominaista kapeakaistaisella signaalilla [4].
Taajuusselektiivinen häipymä on tasaisen häipymän vastakohta. Kanavan vaimennus ontaajuuden funktio, ja vaihesiirto on epälineaarinen funktio taajuudesta[5]. Taajuusse-lektiivinen häipymä on ominaista laajakaistaiselle signaalille. Tätä ominaisuutta voidaankäyttää hyödyksi hajaspektrimenetelmissä SS (SS = Spread Spectrum) käyttämalläRAKE-vastaanotinta[6]. RAKE-vastaanotin sisältää eri monitiekomponenteille sovitet-tuja suodattimia. Vastaanotin voi olla sovitettu signaaliin ainoastaan jos sillä on täy-dellinen tieto kanavan impulssivasteesta. Vastaanottimen sijaitessa nopeasti liikkuvassaajoneuvossa on erittäin vaikeaa saada tarkkaa tietoa impulssivasteesta. Lisäksi ajoneu-von liikkuessa nopeasti kanavan häipymän taso lisää ongelmia. Mitä nopeampaa häi-pymä on sitä vaikeampaa on vastaanottimen sovittaminen kanavaan[4].
Hitaassa häipymässä kanavan amplitudi sekä vaihe pysyvät melkein vakioina eri taa-juuksilla signaalin lähetyksen ajan. Häipymä voi olla joko tasaista tai taajuusselektii-vistä riippuen signaalin kaistanleveydestä. Hidas häipymä aiheutuu rakennuksien jamuiden esteiden aiheuttamasta varjostuksesta. Ilmiö esiintyy tyypillisesti päätelaitteenliikkuessa kaupunkiympäristössä missä talojen aiheuttama varjostus muuttuu jatku-vasti[7].

18
Nopea häipymä on vastakohta hitaalle häipymälle. Kanavan vaimennus sekä vaihesiirtomuuttuvat signaalin lähetyksen aikana[8]. Nopea häipymä aiheutuu signaalin eri moni-tiekomponenttien summautumisesta eri vaiheissa.
Laajakaistainen signaali häipyy taajuusselektiivisesti. Toisin sanoen eri taajuuksillaolevat signaalit vaimenevat eri tavalla. Häipymä voi olla joko hidasta tai nopeaa johtuenerilaisista etenemisolosuhteista. Lisäksi signaalin viive- ja kulmahaje vaihtelevat etene-misympäristön mukaan. Päätelaitteen liikkuessa kanavan siirtofunktio saattaa muuttuaerittäin nopeasti ajan funktiona. Päätelaitteiden nopeudet ovat keskimäärin erilaisia kau-punkien välisillä tieosuuksilla, kaupungeissa ja erilaisissa rakennuksissa. Dopplerhajevaihtelee päätelaitteiden nopeudesta johtuen. Tukiasemasolut jaetaan makro-, mikro- japikosoluiksi niissä käytetyn tehon sekä solun koon mukaan. Makrosoluja käytetään tyy-pillisesti maaseudulla ja esikaupungeissa, mikrosoluja kaupungeissa ja pikosoluja eri-laisissa rakennuksissa. Tästä johtuen myös eri solutyypeillä on keskimäärin erilaisetetenemisolosuhteet, koska niitä käytetään erilaisissa etenemisympäristöissä.
2.3 Deterministisen kanavan systeemifunktiot
Radiokanava jaetaan lineaariseksi aikariippuvaksi LTV (LTV = Linear Time Variant) jalineaariseksi aikariippumattomaksi LTI (LTI = Linear Time Invariant) kanavaksi stabii-lisuuden mukaan[9]. Radiokanavaa voidaan ajatella suodattimena johon syötetään sig-naali ja sieltä saadaan ulos muuntunut signaali. Siirtyvässä tietoliikenteessä kanava to-sin vaihtelee datan lähetysaikana, eli “suodattimen” olosuhteet muuttuvat ajan funktio-na. Siirtyvän tietoliikenteen kanava on siis LTV-tyyppinen. Lineaarinen suodatin voi-daan kuvata sekä aika- että taajuusalueessa. Konvoluutio w(t) voidaan lausua diskree-tissä muodossa[9]
w t z t m h t mm
n
( ) ( ) ( , )= −=
∑∆ ∆ ∆τ τ τ1
, (2.2)
jossa τ impulssin lähetysaika suhteessa t:hen∆τ on ajan diskretointiväliz t m( )− ∆τ on sisäänmenon kompleksinen verhokäyräh t m( , )∆τ on impulssivaste.
Impulssivaste voidaan määritellä fysikaalisesti kanavan vasteena ajanhetkellä t ajan-hetkeä m∆τ aikaisemmin lähetetylle impulssille. Taajuusalueessa voidaan kanavanulostulon spektri W(f) vastaavasti lausua sarjana[9]
W f Z f m H f m mm
n
( ) ( ) ( , )= − −=
∑∆ ∆ ∆ ∆ν ν ν ν1
, (2.3)
jossa ∆ν on taajuuden diskretointiväliZ f m( )− ∆ν on sisäänmenon spektriH f m m( , )− ∆ ∆ν ν on siirtofunktio.
Tämä on duaalinen esitys yhtälölle (2.2). Kanavan ulostulon kompleksiselle verhokäy-rälle on myös kaksi muuta esitystapaa. Aikavariantti siirtofunktio T(f,t) määritellään

19
impulssivasteen Fouriermuunnoksena viivemuuttujan suhteen. Tällöin kanavan ulostulovoidaan lausua
w t Z f T f t e dfj ft( ) ( ) ( , )=−∞
+∞
∫ 2π . (2.4)
Toisessa esitystavassa käytetään Dopplerhajontafunktiota S( , )τ ν ja kanavan ulostulovoidaan lausua
w t z t S e d dtj t( ) ( ) ( , )= −−∞
+∞
−∞
+∞
∫∫ τ τ ν νπν2 . (2.5)
Tämä esitystapa kuvaa ulostulon sarjana viivästettyjä ja Dopplersiirtyneitä signaaleja.Edelläkuvatuissa neljässä yhtälössä esiintyy neljä systeemifunktiota h t( , )τ , H f( , )ν ,T f t( , ) ja S( , )τ ν joilla on yhteys toisiinsa Fourier- ja käänteisen Fouriermuunnoksenkautta kuvan 2.1 mukaisesti
h t( , )τ
T f t( , )
H f( , )ν
S( , )τ ν
F
F
F
F F −1
F −1
F −1
F −1
Kuva 2.1 Systeemifunktioiden yhteys toisiinsa Fourier- ja käänteisen Fouriermuun-noksen kautta[9]
2.4 Satunnainen aikavariantti kanava
Todellinen radiokanava muuttuu satunnaisesti ajan funktiona eli puhutaan satunnaisestaaikariippuvasta kanavasta. Tällöin systeemifunktiot ovat stokastisia prosesseja. Tilas-tolliseen tarkkaan kuvaukseen kanavasta tarvittaisiin tieto kaikkien systeemifunktioidenmonidimensioisista todennäköisyystiheysfunktioista. Tätä vaatimusta ei todellisuudessavoida saavuttaa muuttujien määrän ollessa erittäin suuri. Realistisempi, mutta epätar-kempi lähestymistapa perustuu edellä esitettyjen systeemifunktioiden korrelaatiofunkti-oiden käyttöön[9].
Siirtyvässä tietoliikenteessä, erityisesti laajakaistaisen signaalin ollessa kyseessä, radio-kanava ei ole stabiili, vaan se muuttuu ajan suhteen. Kanavan kuvaus käy kuitenkin ma-temaattisesti hankalaksi, jos ei tehdä määrättyjä yksinkertaistuksia. Kanava jaetaan pie-niin aikaväleihin tai pieniin maantieteellisiin alueisiin. Näiden aikavälien aikana kana-van ei oleteta muuttuvan huomattavasti, joten vastaanotetun signaalin voimakkuus py-syy melkein vakiona. Lisäksi oletetaan ympäristön pysyvän vakiona, eli sirottajien pai-kat eivät muutu lyhyen aikavälin aikana. Eri signaaliviiveet oletetaan olevan korreloi-mattomia keskenään. Kanavaa voidaan kuvata sirontafunktiollaσ τ ν( , ) , joka on

20
aikaviiveen ja dopplerhajeen funktio. Pitkän aikavälin käyttäytyminen saadaan yhdistä-mällä lyhyiltä aikaväleiltä kerätty informaatio yhteen[9].
2.5 Suuntamallit
2.5.1 Kanavamallit
Etenemiskanavan mallintaminen on tärkeää siirtyvässä tietoliikenteessä. Kanavamallitantavat informaatiota kentän voimakkuudesta, tehoviiveprofiilista PDP (PDP = PowerDelay Profile) sekä Doppler-spektristä. Nämä tekijät otetaan huomioon käytettäessäympärisäteileviä antenneja. Esimerkkinä mainittakoon COST 207 laajakaistamalli[10].Adaptiivisten antennien myötä on tullut tarve kehittää suuntamalleja, jotka ottavat huo-mioon edellämainittujen lisäksi signaalin tulokulman AOA (AOA = Angle Of Arrival).Lisäksi tarvitaan tieto päätelaitteen sekä häiritsijöiden suunnasta ja vauhdista [11].
Kanavamallit jaetaan perinteisesti kahteen eri luokkaan eli deterministisiin ja stokasti-siin kanavamalleihin[10]. Kumpikin lähestymistapa sellaisenaan on erittäin työläs suun-tamallien toteuttamiseen. Deterministinen lähestymistapa tukeutuu voimakkaasti etene-misympäristön kuvaukseen, eli rakennuksien ja muiden esteiden paikat määritetään tar-kasti. Kun etenemisympäristö muuttuu ajan funktiona päätelaitteen liikkuessa, tarvitaanpaljon dataa todenmukaisen käsityksen saamiseksi kanavan olosuhteista. Impulssivas-teet lasketaan esimerkiksi säteenseuranta-algoritmin avulla.
Stokastisessa lähestymistavassa käytetään tilastollisia jakaumia etenemisympäristönkuvaamiseen. Useiden tilastollisten jakaumien määrittämisessä tarvitaan suuri määräerilaisia muuttujia. Näiden muuttujien määrittämiseen tarvitaan vastaavasti paljon mit-taustuloksia. Keskiarvoistamalla saadaan vähennettyä parametrien määrää, mutta mene-tetään myös informaatiota. Lisäksi eri jakaumien kuten monitiekomponenttien saapu-misaikojen ja etenemissuuntien jakaumat korreloivat keskenään[12].
2.5.2 Suuntatiedon sisältämät kanavamallit
Viitteessä [11] on ehdotettu käytettäväksi seuraavanlaista menetelmää suuntatiedonsisältämän kanavamallin luomiseksi. Kyseistä menetelmää on käytetty tässä työssä, jo-ten sitä tarkastellaan lähemmin. Tarkastellaan suuntamallia tukiasemalta päin katsottu-na. Päätelaitteet toimivat lähettäjinä ja tukiasema vastaanottajana (uplink). Tukiasema-antennin oletetaan olevan monielementtinen kuvan 2.2 mukaisesti.
x
y
MS
BSSirontapiste
1
2
m
M
. . .
. . .
rlM( )
rlm( )
ϕl BS,
ϕl MS, ϕνMS
νMS
x ys s,
Kuva 2.2 Etenemisympäristö, johon kuvattu lineaarinen tukiasema-antenni, sirottajatja päätelaite

21
Menetelmässä käytetään kahta eri sirottajatyyppiä. Paikalliset sirottajat sijaitsevat pääte-laitteen ympärillä ja kaukosirottajaklusteri kauempana päätelaitteesta. Kompleksinenimpulssivaste voidaan jakaa siirtyvän tietoliikenteen radiokanavassa tyypillisesti neljääneri osaan seuraavasti[11].
h t h t h t h t h tLOS MS kauko BS( , , ) ( , , ) ( , , ) ( , , ) ( , , )τ ϕ τ ϕ τ ϕ τ ϕ τ ϕ= + + + , (2.6)
missä
t on aikaτ on saapumisviiveϕ on saapumiskulmahLOS on näköyhteyskomponentista aiheutuva impulssivastehMS on päätelaitteen läheisyydessä sijaitsevien sirottajien aiheuttama
impulssivastehkauko on kaukosirottajista ja/tai heijastajista aiheutuva impulssivastehBS on tukiaseman läheisyydessä sijaitsevien sirottajien aiheuttama im-
pulssivaste.
Jos tiedetään sirottajien sijainti, voidaan laskea kompleksinen impulssivaste[11]
h t g tl ll
L
( , , ) ( , ) ( )τ ϕ ϕ δ τ τ= −=∑
1, (2.7)
jossa δ on Diracin deltafunktio. Komponenttien amplitudit saadaan kaavasta[11]
g t r r a e e el lm
lM k
lj
l BS
j v t j r ri l
MS l MS vMS lm
lM
( , ) ( ) ( )( ) ( ) /,
( cos( ) ) ( ( )),( ) ( )
ϕ δ ϕ ϕφπλ
ϕ ϕπλ= ⊗ −− − − − +2
2 2
, (2.8)
jossa suureet kuten kuvassa 2.2, eli
rlM( ) on päätelaitteen ja M:nnen sirottajan välinen etäisyys
rlm( ) on sirottajan ja m:nnen antennielementin välinen etäisyys
ϕl BS, on l :nnen monitiekomponentin ja päätelaitteen välinen kulma tukiasemalta
katsottunaϕl MS, on l :nnen monitiekomponentin ja tukiaseman välisen kulman komple-
menttikulmaν MS on päätelaitteen nopeusvektoriϕνMS on päätelaitteen etenemissuunta tukiasemalta katsottuna
a elj lφ on sirontakerroin
ki on vaimennuskerroin.
r rlm
lM( ) ( )⊗ tarkoittaa tuloa r rl
ml
M( ) ( )⋅ sirottajille ja summaa r rlm
lM( ) ( )+ heijastajille.
Tarkasti ottaen kulma ϕl BS, riippuu myös antennielementin sijainnista. Olettaen että
sirontapiste on kaukokentässä, tästä aiheutuva virhe muodostuu kuitenkin pieneksi.

22
Tasaisesti häipyvän sekä taajuusselektiivisesti häipyvän kanavan käsitteitä voidaan laa-jentaa matalan tason (low rank) ja korkean tason (high rank) kanaviksi. Korkean tasonkanavamalli huomioi myös signaalin tulosuunnan. Edelleen suuntamallit voidaan ero-tella kahteen eri luokkaan, matalan tason kanavamalleihin (low-rank channel model) jakorkean tason kanavamalleihin (high-rank channel model)[11]. Ero näiden kahden välil-lä muodostuu kulma- ja viivehajeen perusteella. Tämän perusteella nämä kaksi eri mal-lia voidaan yhdistää yleiseksi malliksi käyttämällä erilaisia parametriarvoja kussakin ta-pauksessa. Malli soveltuu makro, mikro-, sekä pikosoluihin joko näköyhteyskompo-nentin LOS (LOS = Line Of Sight) kanssa tai ilman. Kulmahaje ei ole sama päätelait-teen ja tukiaseman päässä. Mallissa voidaan ottaa tämä huomioon käyttämällä uplink-suunnassa korkean tason ja downlink-suunnassa matalan tason mallia tai päinvastoin.
Korkean tason ja matalan tason kanavamalli voidaan määritellä seuraavasti[11]. Jos vii-vehaje St on pieni verrattuna vastaanottimen suodattimen kaistanleveyden Bs kään-teisarvoon, ja kulmahaje Sϕ on pieni verrattuna antenniryhmän 3 dB:n keilanleveyteen
ϕ3dB on kyse matalan tason kanavasta:
SBt
s
<<1
ja S dBϕ ϕ<< 3 . (2.9)
Jos viivehaje St on yhtäsuuri tai suurempi kuin vastaanottimen suodattimen kaistanle-veyden Bs käänteisarvo tai kulmahaje Sϕ on yhtäsuuri tai suurempi kuin antenniryhmän
3 dB:n keilanleveys ϕ3dB on kyse korkean tason kanavasta:
SBt
s
≥1
tai S dBϕ ϕ≥ 3 . (2.10)
Tarkasti ottaen antenniin tulevan aallon suuntahaje riippuu sekä atsimuuttikulmasta ϕettä elevaatiokulmasta θ . Jotta laskentamäärä pysyisi äärellisenä kanavamallinnuksessa,huomioidaan usein ainoastaan atsimuuttitaso. Laskentatehon kasvaessa pystytääntulevaisuudessa ottamaan huomioon myös elevaatiokulma.
Matalan tason kanavamallissa oletetaan tukiaseman ympärillä sijaitsevien sirottajiensekä kaukosirottajien olevan merkityksettömiä. Tästä johtuen kulmahaje sekä viivehajeovat melko pieniä. LOS-komponentti joko esiintyy tai ei kuvan 2.3 mukaisesti.

23
0 330
300
270
240
210180
150
120
90
30
60
0 330
300
270
240
210180
150
120
90
30
60
matalan tason kanavamallit
LOS-komponentti mukana
ilman LOS-komponenttia
paikallisten sirot- tajien malli
Kuva 2.3 Matalan tason kanavamallin kuvaus [11]
Ympäristöissä, jossa on suuri viivehaje ja/tai suuri kulmahaje, ei voida käyttää matalantason kanavamalleja. Korkean tason kanavamalleissa tulee simuloida paikallistensirottajien lisäksi suurentunutta kulmahajetta. On kaksi tapaa mallintaa tätä. Jokolisätään sirottajaympyrä tukiaseman ympärille tai käytetään kaukosirottajaklustereita.Valinta näiden kahden välillä tehdään sen mukaan, onko kyseessä makro-, mikro- taipikosolu. Kuvassa 2.4 esitetään korkean tason kanavamallin jakaantuminen erilaisiinympäristöihin[11].
ilman LOS-komponenttia
ilman LOS-komponenttia
LOS-kompo-nentin kanssa
LOS-kompo-nentin kanssa
Makrosolut Mikrosolut Pikosolut
korkean tason kanavamallit
paikallisten sirottajien sekä erillisten heijastimien mal- lin lineaarikombinaatio
Kuva 2.4 Korkean tason kanavamallit [11]
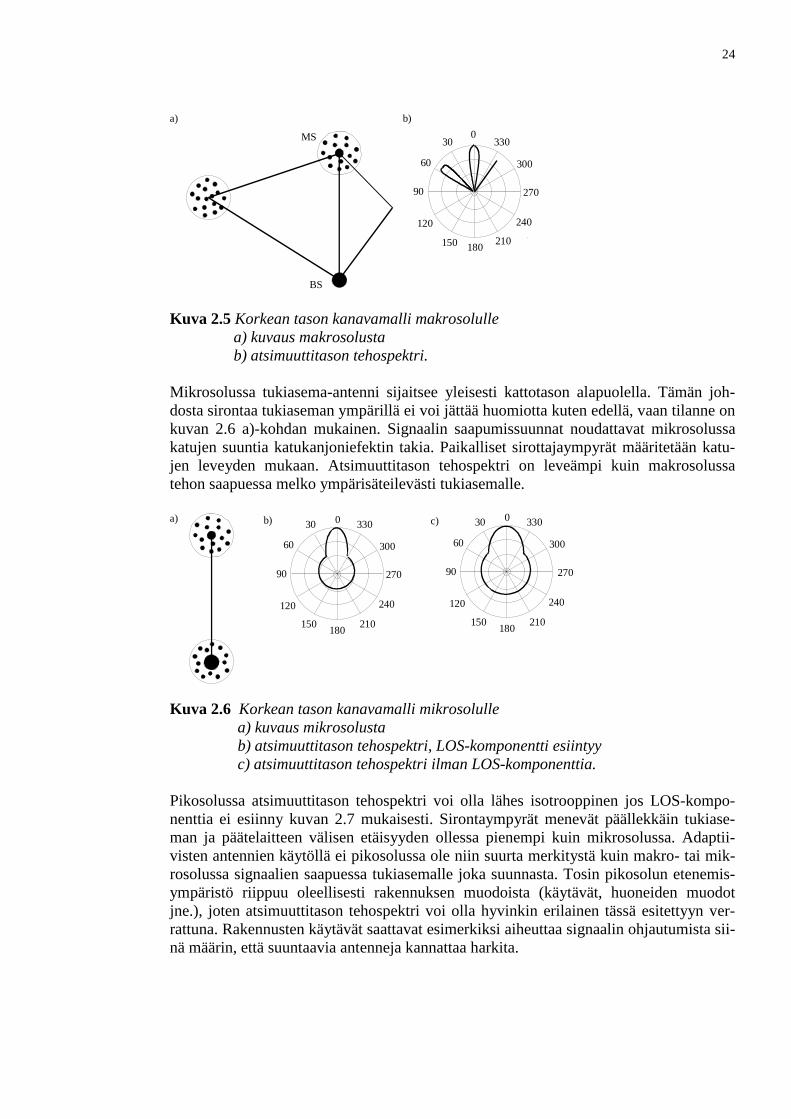
Makrosolumalli sisältää paikallisen sirottajaympyrän päätelaitteen ympärillä ja kauko-sirottajaympyrän ja/tai heijastajan kuvan 2.5 mukaisesti. Atsimuuttitason tehospektistävoidaan havaita tehon saapuvan määrätyistä suunnista. Makrosolumalli antaa yhteneviätuloksia COST 207-mallin kanssa, jos tarkastellaan atsimuuttitason tehospektrin Dopp-lerspektriä[11].
24
0330
300
270
240
210180150
120
90
30
60
a) b)
MS
BS
Kuva 2.5 Korkean tason kanavamalli makrosolulle a) kuvaus makrosolusta b) atsimuuttitason tehospektri.
Mikrosolussa tukiasema-antenni sijaitsee yleisesti kattotason alapuolella. Tämän joh-dosta sirontaa tukiaseman ympärillä ei voi jättää huomiotta kuten edellä, vaan tilanne onkuvan 2.6 a)-kohdan mukainen. Signaalin saapumissuunnat noudattavat mikrosolussakatujen suuntia katukanjoniefektin takia. Paikalliset sirottajaympyrät määritetään katu-jen leveyden mukaan. Atsimuuttitason tehospektri on leveämpi kuin makrosolussatehon saapuessa melko ympärisäteilevästi tukiasemalle.
0 330
300
270
240
210180
150
120
90
30
60
0 330
300
270
240
210180
150
120
90
30
60
a) b) c)
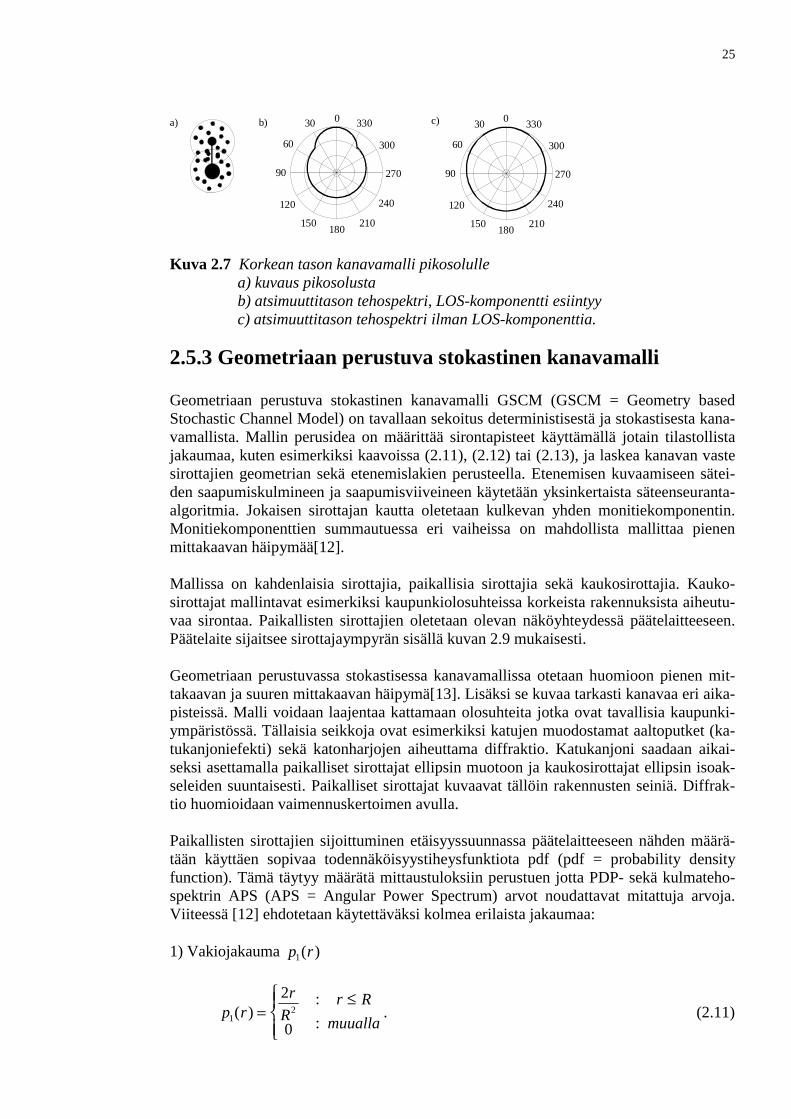
Kuva 2.6 Korkean tason kanavamalli mikrosolulle a) kuvaus mikrosolusta b) atsimuuttitason tehospektri, LOS-komponentti esiintyy c) atsimuuttitason tehospektri ilman LOS-komponenttia.
Pikosolussa atsimuuttitason tehospektri voi olla lähes isotrooppinen jos LOS-kompo-nenttia ei esiinny kuvan 2.7 mukaisesti. Sirontaympyrät menevät päällekkäin tukiase-man ja päätelaitteen välisen etäisyyden ollessa pienempi kuin mikrosolussa. Adaptii-visten antennien käytöllä ei pikosolussa ole niin suurta merkitystä kuin makro- tai mik-rosolussa signaalien saapuessa tukiasemalle joka suunnasta. Tosin pikosolun etenemis-ympäristö riippuu oleellisesti rakennuksen muodoista (käytävät, huoneiden muodotjne.), joten atsimuuttitason tehospektri voi olla hyvinkin erilainen tässä esitettyyn ver-rattuna. Rakennusten käytävät saattavat esimerkiksi aiheuttaa signaalin ohjautumista sii-nä määrin, että suuntaavia antenneja kannattaa harkita.
25
0 330
300
270
240
210180
150
120
90
30
60
0 330
300
270
240
210180
150
120
90
30
60
a) b) c)
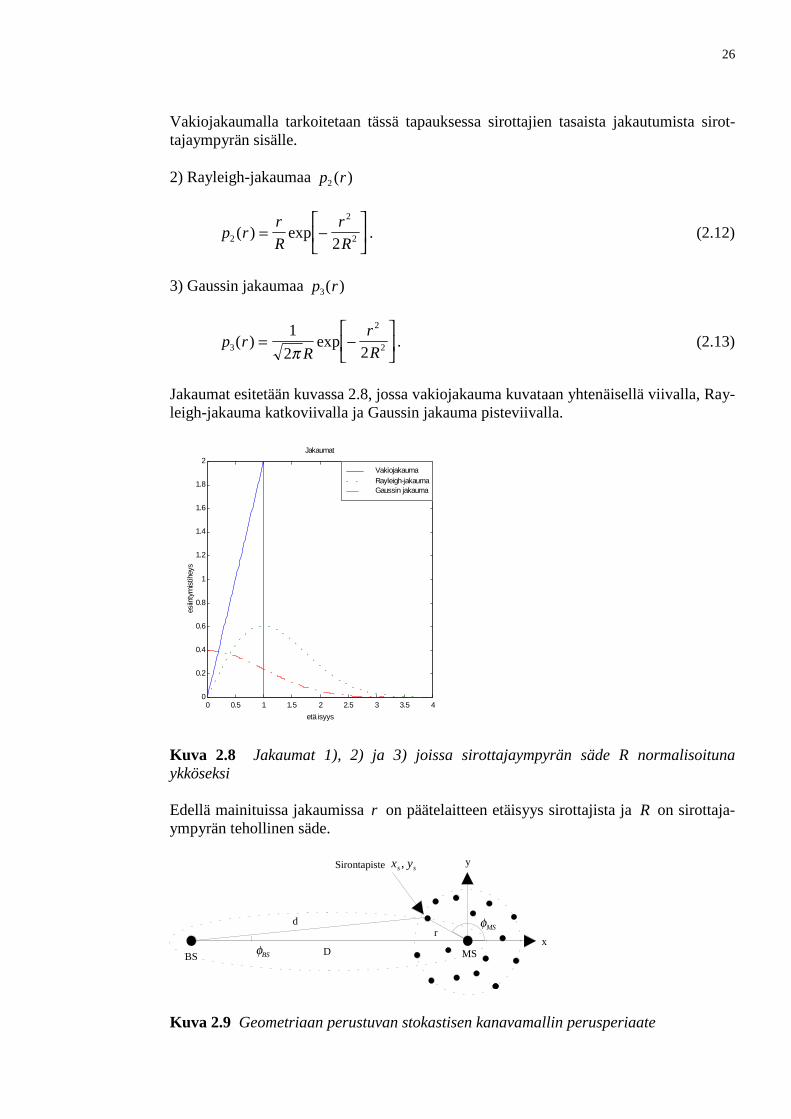
Kuva 2.7 Korkean tason kanavamalli pikosolulle a) kuvaus pikosolusta b) atsimuuttitason tehospektri, LOS-komponentti esiintyy c) atsimuuttitason tehospektri ilman LOS-komponenttia.
2.5.3 Geometriaan perustuva stokastinen kanavamalli
Geometriaan perustuva stokastinen kanavamalli GSCM (GSCM = Geometry basedStochastic Channel Model) on tavallaan sekoitus deterministisestä ja stokastisesta kana-vamallista. Mallin perusidea on määrittää sirontapisteet käyttämällä jotain tilastollistajakaumaa, kuten esimerkiksi kaavoissa (2.11), (2.12) tai (2.13), ja laskea kanavan vastesirottajien geometrian sekä etenemislakien perusteella. Etenemisen kuvaamiseen sätei-den saapumiskulmineen ja saapumisviiveineen käytetään yksinkertaista säteenseuranta-algoritmia. Jokaisen sirottajan kautta oletetaan kulkevan yhden monitiekomponentin.Monitiekomponenttien summautuessa eri vaiheissa on mahdollista mallittaa pienenmittakaavan häipymää[12].
Mallissa on kahdenlaisia sirottajia, paikallisia sirottajia sekä kaukosirottajia. Kauko-sirottajat mallintavat esimerkiksi kaupunkiolosuhteissa korkeista rakennuksista aiheutu-vaa sirontaa. Paikallisten sirottajien oletetaan olevan näköyhteydessä päätelaitteeseen.Päätelaite sijaitsee sirottajaympyrän sisällä kuvan 2.9 mukaisesti.
Geometriaan perustuvassa stokastisessa kanavamallissa otetaan huomioon pienen mit-takaavan ja suuren mittakaavan häipymä[13]. Lisäksi se kuvaa tarkasti kanavaa eri aika-pisteissä. Malli voidaan laajentaa kattamaan olosuhteita jotka ovat tavallisia kaupunki-ympäristössä. Tällaisia seikkoja ovat esimerkiksi katujen muodostamat aaltoputket (ka-tukanjoniefekti) sekä katonharjojen aiheuttama diffraktio. Katukanjoni saadaan aikai-seksi asettamalla paikalliset sirottajat ellipsin muotoon ja kaukosirottajat ellipsin isoak-seleiden suuntaisesti. Paikalliset sirottajat kuvaavat tällöin rakennusten seiniä. Diffrak-tio huomioidaan vaimennuskertoimen avulla.
Paikallisten sirottajien sijoittuminen etäisyyssuunnassa päätelaitteeseen nähden määrä-tään käyttäen sopivaa todennäköisyystiheysfunktiota pdf (pdf = probability densityfunction). Tämä täytyy määrätä mittaustuloksiin perustuen jotta PDP- sekä kulmateho-spektrin APS (APS = Angular Power Spectrum) arvot noudattavat mitattuja arvoja.Viiteessä [12] ehdotetaan käytettäväksi kolmea erilaista jakaumaa:
1) Vakiojakauma p r1( )
p rr
R12
2
0( ) =
:
:
r R
muualla
≤. (2.11)
26
Vakiojakaumalla tarkoitetaan tässä tapauksessa sirottajien tasaista jakautumista sirot-tajaympyrän sisälle.
2) Rayleigh-jakaumaa p r2 ( )
p rr
R
r
R2
2
22( ) exp= −
. (2.12)
3) Gaussin jakaumaa p r3( )
p rR
r
R3
2
2
1
2 2( ) exp= −
π
. (2.13)
Jakaumat esitetään kuvassa 2.8, jossa vakiojakauma kuvataan yhtenäisellä viivalla, Ray-leigh-jakauma katkoviivalla ja Gaussin jakauma pisteviivalla.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
etä isyys
esiin
tym
istih
eys
Jakaumat
VakiojakaumaRayleigh-jakaumaGaussin jakauma
Kuva 2.8 Jakaumat 1), 2) ja 3) joissa sirottajaympyrän säde R normalisoitunaykköseksi
Edellä mainituissa jakaumissa r on päätelaitteen etäisyys sirottajista ja R on sirottaja-ympyrän tehollinen säde.
x
y
MSBS D
dr
φMS
φBS
x ys s,Sirontapiste
Kuva 2.9 Geometriaan perustuvan stokastisen kanavamallin perusperiaate

27
Kuten aikaisemmin mainittiin, todennäköisyystiheysjakauma tulee määrätä mittaustu-loksiin perustuen. Mittausdatan, joka sisältää viive- sekä kulmatiedon, perusteella voi-daan selvittää sirottajien sijainti kaavojen (2.16) ja (2.17) mukaan. Vastaavasti kuvan2.9 perusteella voidaan johtaa kaavat (2.14) ja (2.15) joista selviää monitiekompo-nenttien viiveet sekä saapumiskulmat. Kaavoissa käytetyt suureet selviävät kuvasta 2.9.
θ( , ) tanx y ay
D xs ss
s
=+
. (2.14)
τ ( , )( )
x yx y D x y
cs ss s s s=
+ + + +2 2 2 2
. (2.15)
xD c
D cDs BS
BS
( , )( ( ) )
tan ( )τ φ
ττ φ
=−
− +−
2 2
22 2 1. (2.16)
yD c
D cs BS
BS
BS
( , )( ( ) ) tan( )
tan ( )τ φ
τ φτ φ
=− ⋅
− +
2 2
22 2 1. (2.17)
Sirottajien sijainti saadaan johdettua matemaattisella kuvauksella viiveiden ja saapumis-kulmien perusteella (2.14), (2.15) → (2.16), (2.17). Vastaavasti viiveet sekä saapumis-kulmat saadaan sirottajien sijainnin perusteella (2.16), (2.17) → (2.14), (2.15).
Todennäköisyystiheysfunktiona pdf x ys s1( , ) voidaan käyttää edellä mainittua vakioja-kaumaa, Rayleigh-jakaumaa tai Gaussin jakaumaa. Käyttäen kaavassa (2.19) esitettyäJacobin determinanttia voidaan laskea saapumiskulman sekä viiveen todennäköisyys-tiheysfunktio pdf BS2 ( , )τ φ kaavan (2.18) mukaisesti[12].
pdf pdf x y JBS s BS s BS BS2 1( , ) (( ( , ), ( , )) ( , )τ φ τ φ τ φ τ φ= ⋅ . (2.18)
J
d
dx
d
dy
d
dx
d
dy
BS
s BS s BS
BSs BS
BSs BS
( , )( , ) ( , )
( , ) ( , )τ φ τ
τ φτ
τ φ
φτ φ
φτ φ
= . (2.19)
Mittausdatan, joka sisältää kulmatiedon sekä viivetiedon, perusteella voidaan kyseinenlaskenta tehdä päinvastaisessa järjestyksessä eli saada selville sirottajien sijainnin toden-näköisyystiheysfunktio pdf x ys s1( , ) . Toisin sanoen voidaan määrätä mittaustuloksiinsopiva jakauma.
pdf x y pdf x y x y J x ys s s s BS s s s s1 2( , ) ( ( , ), ( , )) ( , )= ⋅τ φ (2.20)
J x y
d
dxx y
d
dxx y
d
dxx y
d
dxx y
s ss
BS s ss
s s
sBS s s
ss s
( , )( , ) ( , )
( , ) ( , )=
φ τ
φ τ(2.21)

28
Geometriaan perustuvassa stokastisessa kanavamallissa oletetaan sironnan tapahtuvanvain yhdestä sirottajasta. Varsinkin kaupunkiympäristössä tämä ei todellisuudessa pidäpaikkansa. Tämä ei aiheuta ongelmia, koska ollaan kiinnostuneita ainoastaan monitie-komponenttien saapumiskulmista ja saapumisviiveistä. Kanavamallin mukainen sirot-tajajakauma antaa siis samat saapumiskulmat ja saapumisviiveet kuin todellinen sirot-tajajakauma. Toisin sanoen todelliset sirottajien paikat eroavat mallitetuista saapumis-kulmien sekä viiveiden noudattaessa tästä huolimatta samanlaista jakaumaa. Kuvassa2.10 havainnollistetaan tilannetta. Yhtenäisellä viivalla kuvataan todellista signaalinkulkutietä. Tässä esimerkissä signaali siis heijastuu kahdesta eri kohteesta. Kanavamal-lin mukainen signaalin kulkureitti on esitetty katkoviivalla. Tässä esiintyy ainoastaanyksi sirottaja. Oletetaan yhtenäistä viivaa ja katkoviivaa kulkevan reitin olevan yhtäpitkiä (samat saapumisviiveet) ja lisäksi signaalin saapumiskulman tukiasemalle olevansama kummassakin tapauksessa. Näin saadaan saapumiskulma ja saapumisviive sa-moiksi.
MS
BS
Kuva 2.10 Todellinen ja kanavamallin mukainen sirottajajakauma

29
3 Monielementtirakenteiden käyttö radiojärjes-telmissä
Monielementtisten antennien käyttö on tullut tarpeelliseksi adaptiivisten antennien myö-tä tietoliikennesovelluksissa. Tässä luvussa käsitellään antenniryhmiin ja adaptiivisuu-teen liittyviä asioita. Ensin tarkastellaan erilaisia antennielementtirakenteita jonka jäl-keen siirrytään antennirakenteisiin. Seuraavaksi käsitellään erilaisia diversiteettiratkai-suja ja lopuksi keskitytään adaptiivisuuteen.
3.1 Erilaiset antennielementtirakenteet
3.1.1 Perinteiset antennit
Siirtyvässä tietoliikenteessä on perinteisesti käytetty antenneina λ / 2 -dipoleja ja λ / 4 -monopoleja UHF-alueella. Näitä on käytetty myös antenniryhmien rakentamiseen. Ver-tikaalisen dipolin sekä monopolin säteilykuviot ovat ympärisäteileviä horisontaali-tasossa. λ / 2 -dipolilla on 78° 3 dB:n E-tason keilanleveys ja 2.15 dBi:n suuntaavuus.Lisäksi sen sisäänmenoimpedanssi on keskitaajuudella melkein reaalinen arvoltaan noin73 Ω . Kuvassa 3.1 on esitetty λ / 2 -dipolin säteilykuvio vertikaalitasossa. Dipolinpituuden kasvaessa sen säteilykuvio muuttuu huomattavasti[13].
Vastaavasti λ / 4 -dipolilla asetettuna äärettömän suurelle maatasolle on 38° 3 dB:n kei-lanleveys ja 5.15 dBi:n suuntaavuus. Sisäänmenoimpedanssi on puolet pienempikuin λ / 2 -dipolilla. Käytännössä maataso ei yleensä ole ideaalinen eikä ääretön, jotenkeila on hieman kallistunut ylöspäin horisontaalitasossa ja sen suuntaavuus on pienempikuin 5.15 dBi:tä [13]. Tämä tulee ottaa huomioon antennisuunnittelussa. Esimerkiksipiensolun tukiasemalla monopoliantenniryhmä on käännetty ylösalaisin, jotta keilaosoittaa hieman alaspäin horisontaalitasosta [14].
3 dB
39°
Kuva 3.1 λ / 2 -dipolin säteilykuvio
3.1.2 Mikroliuska-antennit
Mikroliuska-antenneja on ehdotettu käytettäväksi radiojärjestelmissä useasta eri syystä.Viitteesssä [15] on käsitelty lyhyesti mikroliuska-antenneja, niiden hyviä ja huonojapuolia. Ne ovat helppoja valmistaa ja integroida muihin piireihin. Valmistaminen on yk-sinkertaisuuden vuoksi halpaa. Rakenne on kevyt ja kestävä. Mikroliuska-antenninsuuntaavuus on pieni, mutta sitä voidaan lisätä muodostamalla antenneista lineaarisia japlanaarisia ryhmiä. Antenniryhmiä käytetään adaptiivisissa antenniratkaisuissa. Ongel-mana on kapea impedanssikaistanleveys sekä huono hyötysuhde. Kapeakaistaisuudesta

30
on haittaa laajakaistaisissa sovelluksissa. Kaistanleveyttä voidaan hieman kasvattaa jokopaksuntamalla käytettyä substraattia tai käyttämällä substraaattia jolla on pienempi per-mittiivisyys. Eniten käytettyjä elementtimuotoja ovat pyöreä sekä suorakulmainen ra-kenne. Ympyräpolarisaatio toteutetaan syöttämällä elementtiä kahdesta eri kohdasta.Kuvassa 3.2 on esitetty oikosuljettu mikroliuska-antenni[16].
Maataso
Syöttö
Koaksiaalikaapeli
Substraatti
Oikosulku
Elementti
Kuva 3.2 Oikosuljettu mikroliuska-antenni kuvattuna sivulta[16]
Viitteessä [16] on esitetty menetelmä mikroliuska-antennien kaistanleveyden lisäämi-seksi. Menetelmässä jaetaan leveämpi mikroliuska useaksi pienemmäksi liuskaksi, jotkaon viritetty eri resonanssitaajuuksille. Yhtä mikroliuskaa syötetään toisten ollessa para-siittisesti kytkettyjä. Impedanssikaistanleveys saadaan näin nousemaan yli kaksinker-taiseksi antennin pinta-alan kasvamatta merkittävästi. Viitteen tutkimus osoittaa myösparasiittisten elementtien aiheuttavan polarisaation taajuusriippuvuutta.
3.2 Erilaiset antennirakenteet
3.2.1 Antenniparametrit
Antenniparametrit jaetaan säteilyominaisuuksia sekä piiriominaisuuksia kuvaaviin para-metreihin. Kyseisiä parametreja tarvitaan antennien suunnittelussa. Näiden lisäksi suun-nittelussa tulee ottaa huomioon antennin hinta, koko, paino ja muoto.
Piiriparametrit
Piiriteorian kannalta antenni on syöttönavoista katsottuna impedanssi, joka muuttuutaajuuden funktiona. Antennin impedanssi Za koostuu resistiivisesta ja reaktiivisestaosasta kaavan
Z R jXa a a= + (3.1)
mukaisesti. Resistanssi Ra puolestaan sisältää säteilyresistanssin Rr ja antennin häviötRh. Reaktanssi Xa johtuu antennin lähikentässä värahtelevästä loistehosta. Tästä saadaanedelleen määritettyä antennin hyötysuhde ηp kaavalla
ηpr
r h
R
R R=
+. (3.2)

31
Kahden antennin välistä radioyhteyttä voidaan kuvata resiprookkisena kaksiporttinakuvan 3.3 mukaan. Jos oletetaan vain yhden antennin sijaitsevan avaruudessa onantennin impedanssi Za = Z11 ja antennien keskinäisvaikutusta ei esiinny. Mitä lä-hempänä kyseistä antennia on avaruuteen tuotu toinen antenni sitä suurempi on näidenkahden välinen kytkentä eli impedanssi Z12. Tässä tapauksessa Za = Z11 - Z12. Antennienollessa toistensa kaukokentässä niiden välinen kytkentä on pieni. Antennien välinenkytkentä määrää myös antennien suuntakuvioiden ominaisuudet.
Z Z11 12− Z Z22 12−
Z12
I1
U1
I2
U2
Kuva 3.3 Kahden antennin radioyhteyttä kuvaava vastinpiiri[17]
Säteilyparametrit
Säteilyyn liittyvät suureet saadaan antennin kaukokentän lausekkeesta, joka sähköken-tälle E r( ) määritellään[17]
E r je
rN u
jkr
t r( ) ( )= −−
ωµπ4
, (3.3)
jossa E r( ) on sähkökenttä
N ut r( ) on säteilyvektori.
Edelleen säteilyvektorin poikittainen komponentti N ut r( ) määritellään[17]
N u P N u P e J r dVt r rjku r
V
r( ) ( ) ( )= ⋅ = ⋅ ′ ′⋅∫ , (3.4)
joissa N ur( ) on säteilyvektori
P on projektiodyadiJ r( )′ on virtafunktio.
Säteilyominaisuuksia kuvaavia parametreja ovat seuraavat:
Säteilykuvio

32
Säteilykuvio on tietyn origon kautta kulkevan tason funktiosta F ur( ) leikkaama taso-
kuvio. Säteilyvektorin poikittaisen komponentin N ut r( ) normalisoitu amplitudi F ur( )määritellään[17]
F uN u
N u
E r
E rr
t r
t r
( )( )
( )
( )
( )max max
= = . (3.5)
Keilanleveys
Keilanleveydelle on kaksi eri määritelmää. Yleisempi näistä kahdesta on 3 dB:n kei-lanleveys eli puolen tehon keilanleveys ∆θ3dB . Toinen määritelmä on pääkeilan nol-lakohtien välinen kulma ∆θ0 .
Sivukeilataso
Antennin suuntakuviossa on yksi pääkeila sekä useita pääkeilaa pienempiä sivukeiloja.Pääkeilan kokoisia sivukeiloja kutsutaan sivumaksimeiksi. Sivukeilataso on sivukeilo-jen maksimin arvo pääkeilaan verrattuna [17].
Suuntaavuus
Suuntaavuus on antennin kyky keskittää säteily määrättyyn suuntaan. Ideaalisen ympä-
risäteilevän antennin suuntaavuus on 0 dB. Suuntaavuus D ur( ) määritellään [17]
D uW u
P
E r
E r d
F u
F u dr
r
rad
r
r
( )( ) ( )
( )
( )
( )= = =
∫ ∫4
4 42
2
2
2π
π π
Ω Ω, (3.6)
jossa W ur( ) on antennin suuntaan ur säteilemä tehotiheys avaruuskulmaa kohtiPrad on antennin säteilemä kokonaistehoΩ on avaruuskulma.
Muut suureet ovat kuten kaavassa (3.3).
Antennin vahvistus
Vahvistuksen määritelmässä säteilytehon sijasta käytetään antenniin syötettyä tehoa.Vahvistus on käytännössä pienempi kuin suuntaavuus, koska osa tehosta kuluu antenninhäviöihin. Yhteys suuntaavuuden ja vahvistuksen välille määritellään
G Dp= η , (3.7)
jossa ηp on säteilyhyötysuhde eli säteilytehon ja syötetyn tehon suhde.

33
Antennin sieppauspinta
Antennin sieppauspinta on sellainen efektiivinen pinta-ala Ae , jonka avulla voidaan las-kea tulevan aallon tehotiheydestä S antennin sieppaama teho P eli
P A Se= . (3.8)
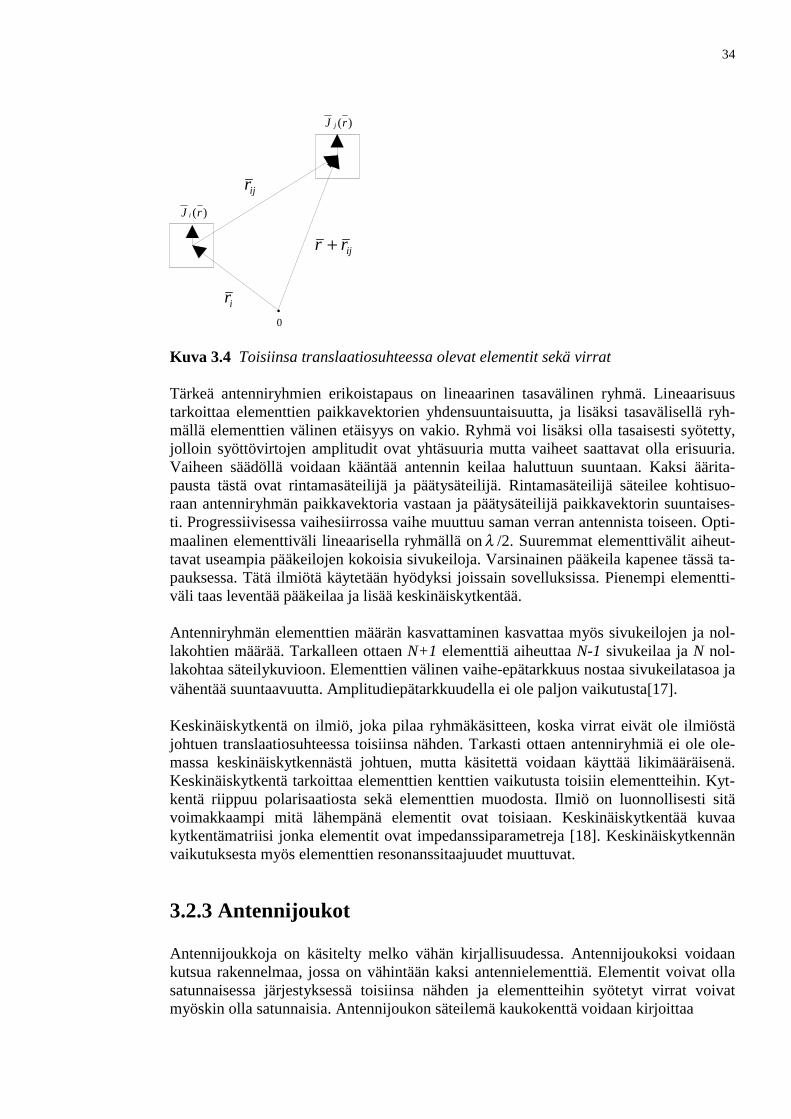
3.2.2 Antenniryhmät
Yleisten antennijoukkojen, joita käsitellään seuraavassa kohdassa, erikoistapaus on an-tenniryhmä. Yleisessä tapauksessa antenniryhmän elementit sijaitsevat kolmiulottei-sessa avaruudessa kuvan 3.4 mukaisesti. Antenniryhmän elementit sekä virrat ovattranslaatiosuhteessa toisiinsa nähden. Antenniryhmän ehtona on, että minkä tahansai:nnen ja j:nnen antennielementin virtafunktioiden J ri ( ) ja J rj ( ) välillä on yhteys[17]
J r a J r rj ij i i ij( ) ( )= + , (3.9)
jossa J on virrantiheysaij on amplitudin ja vaiheen määrittelevä kompleksikerroin
r i on elementin paikkavektoririj on kahden elementin välinen vektori.
Kuvassa 3.4 olevilla lyhyillä nuolilla kuvataan virtoja ja neliöillä antennielementtejä.Antenniryhmän säteilemä kaukokenttä voidaan kirjoittaa[17]
E r a e E uijk u r
ri
Nr i( ) ( )= •
=∑ 0
0
, (3.10)
jossa E r( ) on antenniryhmän säteilemä kaukokenttäai on amplitudin ja vaiheen määrittelevä kompleksikerroink on aaltoluku
ur on säteilysuunta
E ur0 ( ) on elementin kenttä.
Sanallisesti ilmaistuna ryhmän kaukokenttä on ryhmäkertoimen ja elementin kentän tu-lo.
Antenniryhmästä tulee sitä suuntaavampi mitä enemmän siinä on elementtejä. Toisin sa-noen elementtien määrän kasvattaminen suurentaa apertuuria, joka aiheuttaa pääkeilankaventumista. Tämä mahdollistaa adaptiivisilla antenniryhmillä paremman erottelunkäyttäjien välillä.
34
J ri ( )
J rj ( )
0•
r rij+
rij
ri
Kuva 3.4 Toisiinsa translaatiosuhteessa olevat elementit sekä virrat
Tärkeä antenniryhmien erikoistapaus on lineaarinen tasavälinen ryhmä. Lineaarisuustarkoittaa elementtien paikkavektorien yhdensuuntaisuutta, ja lisäksi tasavälisellä ryh-mällä elementtien välinen etäisyys on vakio. Ryhmä voi lisäksi olla tasaisesti syötetty,jolloin syöttövirtojen amplitudit ovat yhtäsuuria mutta vaiheet saattavat olla erisuuria.Vaiheen säädöllä voidaan kääntää antennin keilaa haluttuun suuntaan. Kaksi äärita-pausta tästä ovat rintamasäteilijä ja päätysäteilijä. Rintamasäteilijä säteilee kohtisuo-raan antenniryhmän paikkavektoria vastaan ja päätysäteilijä paikkavektorin suuntaises-ti. Progressiivisessa vaihesiirrossa vaihe muuttuu saman verran antennista toiseen. Opti-maalinen elementtiväli lineaarisella ryhmällä on λ /2. Suuremmat elementtivälit aiheut-tavat useampia pääkeilojen kokoisia sivukeiloja. Varsinainen pääkeila kapenee tässä ta-pauksessa. Tätä ilmiötä käytetään hyödyksi joissain sovelluksissa. Pienempi elementti-väli taas leventää pääkeilaa ja lisää keskinäiskytkentää.
Antenniryhmän elementtien määrän kasvattaminen kasvattaa myös sivukeilojen ja nol-lakohtien määrää. Tarkalleen ottaen N+1 elementtiä aiheuttaa N-1 sivukeilaa ja N nol-lakohtaa säteilykuvioon. Elementtien välinen vaihe-epätarkkuus nostaa sivukeilatasoa javähentää suuntaavuutta. Amplitudiepätarkkuudella ei ole paljon vaikutusta[17].
Keskinäiskytkentä on ilmiö, joka pilaa ryhmäkäsitteen, koska virrat eivät ole ilmiöstäjohtuen translaatiosuhteessa toisiinsa nähden. Tarkasti ottaen antenniryhmiä ei ole ole-massa keskinäiskytkennästä johtuen, mutta käsitettä voidaan käyttää likimääräisenä.Keskinäiskytkentä tarkoittaa elementtien kenttien vaikutusta toisiin elementteihin. Kyt-kentä riippuu polarisaatiosta sekä elementtien muodosta. Ilmiö on luonnollisesti sitävoimakkaampi mitä lähempänä elementit ovat toisiaan. Keskinäiskytkentää kuvaakytkentämatriisi jonka elementit ovat impedanssiparametreja [18]. Keskinäiskytkennänvaikutuksesta myös elementtien resonanssitaajuudet muuttuvat.
3.2.3 Antennijoukot
Antennijoukkoja on käsitelty melko vähän kirjallisuudessa. Antennijoukoksi voidaankutsua rakennelmaa, jossa on vähintään kaksi antennielementtiä. Elementit voivat ollasatunnaisessa järjestyksessä toisiinsa nähden ja elementteihin syötetyt virrat voivatmyöskin olla satunnaisia. Antennijoukon säteilemä kaukokenttä voidaan kirjoittaa

35
E r a e E uiju r
rir
Nr i( ) ( )= •
==
∑ 000
, (3.11)
jossa suureet ovat kuten kaavassa (3.10). Tämä eroaa vastaavasta antenniryhmän kauko-kentän kaavasta yksittäisten elementtien mielivaltaisten säteilysuuntien ur osalta johtu-en elementtien satunnaisesta sijoittelusta ja satunnaisista virroista. Kuvasta 3.5 voidaanhavaita sekä elementtien että virtojen kiertyneen toisiinsa nähden. Esimerkiksi sylinterinpinnalla olevat mikroliuskat muodostavat antennijoukon koska antennielementit ovatkiertyneet 360$ / n toisiinsa nähden.
J ri ( )
J rj ( )
0•
r rij+
rij
ri
Kuva 3.5 Elementit ja virrat satunnaisessa järjestyksessä toisiinsa nähden
Antennijoukon säteilemää kaukokenttää ei voida määritellä elementin kentän ja ryhmä-kertoimen tulona kuten antenniryhmälle. Antennijoukolle ei voida esittää ryhmäker-
rointa koska säteilysuunta ur ei ole yksikäsitteinen.
3.2.4 Synteesimenetelmät
Antennijoukoille ei ole olemassa tunnettuja synteesimenetelmiä. Sen sijaan antenniryh-män säteilykuvion muokkaamiseen on kehitetty erilaisia synteesimenetelmiä. Menetel-millä voidaan esimerkiksi alentaa sivukeilatasoa tai siirtää nollakohtia. Eri synteesime-netelmiä ovat mm. [17]
• Schelkunoffin synteesi• Suora polynomisynteesi• Dolphin Tsebyshev-synteesi• Taylorin synteesi• Orchardin synteesi.
Schelkunoffin synteesi
Ryhmäkerroin voidaan kirjoittaa [17]
f z a z a z z z z z zii
n Ni
N
( ) ( )( )...( )= = − − −− −=
−
∑ 1 1 2 10
1
, (3.12)

36
missä kompleksiluvut zi ovat funktion f z( ) nollakohtia. Funktion f z( ) nollakohdatmääräävät ryhmäkuvion ominaisuudet. Nollakohdat voidaan asettaa halutulla tavallalausekkeeseen ja kehittää se tämän jälkeen polynomimuotoon.
Suora polynomisynteesi
Suora polynomisynteesi soveltuu rintamasäteilijälle. Elementtien etäisyydet dtoisistaan ovat myös vakioita. Jos tiedetään säteilyamplitudit Am suunnissa ϕm voidaanvirta-kertoimet ai ratkaista kaavan (3.13) mukaan. Tämä edellyttää kompleksisten
kertoimien zmi muodostavan matriisin kääntämistä[17].
f a z a e Am i mi
iijkd
mi
N
i
Nm( ) cosγ ϕ= = =
=
−
=
−
∑∑0
1
0
1
(3.13)
Dolphin Tsebyshev-synteesi
Dolphin Tsebyshev-synteesi perustuu Tsebyshevin polynomien hyväksikäyttöön. Mene-telmällä vaikutetaan kolmeen eri asiaan, pääkeilan leveyteen, sivukeilatasoon ja ele-menttien lukumäärään. Menetelmällä saadaan optimaalinen suuntaavuus lineaariselletasaväliselle ryhmälle, kun valitaan elementtien lukumäärä sekä sivukeilataso. Toisaaltavalitsemalla suuntaavuus saadaan optimaalinen sivukeilataso. Tsebyshevin polynomitT xm( ) määritellään [17]
T xm h x x
m x xm ( )cosh( arccos ( )), ,
cos( arccos( )), .=
≥≤
1
1(3.14)
Nämä voidaan lausua x:n potensseina m:n parillisella ja parittomalla arvolla seuraavasti[17]
T xM
n M
n M
nxM
M n
n
Mn
20
212
2( ) ( ) ( ) ,= −+
+
−
=∑ (3.15)
T xM
n M
n M
nxM
M n n
n
M
2 12 1
11
2 1
2 1
1
2 12−
− −
== −
−− +
− +−
∑( ) ( )
( )( ) . (3.16)
Ryhmäkerroin voidaan lausua seuraavasti [17]
[ ]f a e
b
bn
b
bn
iij
i
N
n
n
M
n
n
M( )cos( / ),
cos ( ) / ,γ
γ
γγ= =
+
−
=
−=
=
∑∑
∑0
101
11
1 2 2 2
2 2 1 2
kun
kun
N M
N M
= +=2 1
2
,
.(3.17)
Ryhmäkertoimen lausekkeissa bn kuvaa elementtien amplitudeja. Indeksointi aloitetaanryhmän keskeltä ja parittomassa tapauksessa keskimmäisen elementin amplitudi on b0 .Ryhmäkerroin tulee valita Tsebyshevin polynomiin verrannolliseksi ( f x T xm( ( )) ( )γ = )jossa

37
γ ( ) arccosxx
x=
2
1
. (3.18)
Näin valitsemalla kaikki suuntakuvion sivukeilat saadaan yhtä pieniksi. Sijoittamallaγ ( )x ryhmäkertoimen lausekkeeseen saadaan Tsebyshevin polynomi, jos elementtienamplitudit valitaan sopivasti. Tämä voidaan tehdä asettamalla joko polynomien x:n ker-toimet tai nollakohdat samoiksi. Tsebyshevin synteesissä muutetaan siis säteilykuvionnollakohtia ja elementtien virtoja. Menetelmä tulee kannattavaksi vasta suurilla ryhmillä-30 dB:n sivukeilatasolla.
Taylorin synteesi
Taylorin synteesi perustuu jatkuvan apertuurijakauman optimoimiseen säteilykuvionsivukeilatason ollessa vakio. Taylorin synteesiä on käsitelty viitteessä [19]. Taylorinsynteesissä pyritään näkyvän alueen sivukeilataso saamaan likimain vakioksi. Näkyvänalueen ulkopuolella olevien sivukeilojen amplitudeja ei nosteta näkyvän alueen sivu-keilojen amplitudien tasalle. Tästä johtuen pääkeila on hieman leveämpi kuin DolphinTsebyshev-synteesissä. Sivukeilojen tasoa säädellään siirtämällä nollakohtia. Editoitu
säteilyfunktio f u( ) määritellään
f u f uu u
u n
n
N
n
n
N( ) ( )( / )
( / )=
−
−=
=
Π
Π1
2 2
1
2 2
1
1, (3.19)
jossa 2N on nollakohtien lukumääräu on suuntaparametriun on uuden nollakohdan paikkan on vanhan nollakohdan paikka.
Suuntaparametri u määritellään
ua h
k= −
2
λθ(cos ) , (3.20)
jossa 2a on apertuurin pituusλ on aallonpituusθ on säteilykuvion kulmah on antennin tehollinen pituusvektorik on aaltoluku.
Uusien nollakohtien paikat un määritellään
u NS n
S Nn = ++ −+ +
( )( / )
( / )1
1 2
1 2
2 2
2 2 . (3.21)
Parametri S määritellään halutusta sivukeilatasosta s .

38
S s= − −1101 20
πcosh ( )/ . (3.22)
Orchardin synteesi
Jokaisen sivukeilan taso voidaan myös määrätä suhteessa pääkeilaan. Menetelmä on ni-meltään Orchardin synteesi joka on esitetty viitteessä [20]. N-elementtisen ryhmän ryh-mäkerroin voidaan esittää muodossa
f a e eNj j
i
Ni( ) ( )
~γ γ γ= −
=
−
∏1
1
. (3.23)
Edelleen parametri γ määritellään
γ ϕ δ= +kd cos , (3.24)
jossa k on aaltolukud on elementtien välinen etäisyysϕ on tarkastelukulmaδ on vaihesiirto.
Ryhmäkertoimen lausekkeessa ~γ i :t (~ ~ ~γ γ γi Ri Iij= − ) ovat f ( )γ :n nollakohtia. Ryhmä-
kertoimen (3.23) avulla voidaan vahvistus G( )γ esittää muodossa
[ ]G f e eiRi
i
NIi( ) log ( ) log cos( ~ )
~ ~γ γ γ γγ γ= = − − +
=
−
∑10 10 1 22 2
1
1
. (3.25)
Ryhmän sivukeilatason antava funktio S( )γ saadaan vähentämällä ryhmävahvistuk-
sesta pääkeilaan suuntautuva teho G( )γ . Funktio S( )γ voidaaan esittää muodossa
Se e
e e
Ii Ii
Ii Ii
Ri
Rii
N
( ) logcos( ~ )
cos( ~ )
~ ~
~ ~γγ γγ γ
γ γ
γ γ=− − +− − +=
−
∑101 2
1 2
2
21
1
. (3.26)
Eräs nollakohdista ~γ kiinnitetään johonkin arvoon jolloin sivukeilataso voidaan opti-moida suunnissa γ i loppujen nollakohtien reaali- ja imaginaariosien suhteen yhtälöryh-mästä
S T i Ni i( ) ( ), ...γ γ= = −1 2 4 (3.27)
missä T i( )γ on haluttu normalisoitu ryhmävahvistus. Tämän epälineaarisen yhtälöryh-män ratkaisemiseen voidaan soveltaa Newtonin menetelmää. Linearisoinnin jälkeenvoidaan halutun säteilykuvion toteuttavat nollakohdat ratkaista rekursiivisesti.

39
3.3 Tekniset ratkaisut häipymän torjumiseksi
3.3.1 Vastaanottotoiste
Toistemenetelmien tarkoituksena on vastaanottaa mahdollisimman korreloimattomatversiot signaalista ja yhdistää ne jollain sopivalla tavalla. Toistemenetelmiä käytetäännopean ja hitaan häipymän ehkäisemiseen. Vastaanottotoistemenetelmiä (RX-diversity)on kehitetty useita.
Paikkatoiste
Paikkatoisteessa käytetään useampaa antennia. Antennien tulee olla tarpeeksi etäällä toi-sistaan, jotta korrelaatiokerroin saadaan tarpeeksi pieneksi. Viitteen [21] mukaan korre-laation pitää olla vähemmän kuin 0.7. Tämä saavutetaan asettamalla antennit 15-20 aal-lonpituuden etäisyydelle toisistaan horisontaalisuunnassa. Vertikaalisuunnassa vastaavatarvot ovat 70-80 allonpituutta. Tutkimus tehtiin 800 MHz:n taajuudella. Myös muitatutkimuksia on tehty aiheeseen liittyen [22]. Tästä voidaan päätellä signaalintulokulman vaikuttavan korrelaatiokertoimeen. Se on huomattavan erilainen rintama-kuin pääty-säteilijälle samalla antennilla.
Taajuustoiste
Taajuustoisteessa käytetään kahta eri taajuuskanavaa. Kanavat ovat tavallisesti samallataajuusalueella, mutta ne voivat sijaita myös eri taajuusalueilla. Menetelmän heikkouson kahden kanavan tarve. Lisäksi toimittaessa eri taajuusalueilla tarvitaan myös kaksieri antennia. Radiokanavalla esiintyvä häipymä on erilaista eri taajuusalueilla. Kanavientaajuuseron tulee olla riittävä, jotta korrelaatio eri signaalien välillä on mahdollisimmanpieni. Korrelaatiokaistanleveys riippuu etenemisympäristöstä[23].
Siirtyvässä tietoliikenteessä käytetään taajuushyppelyä, jossa signaalitaajuutta vaihdel-laan usean eri taajuuden välillä. Esimerkiksi GSM-järjestelmään on spesifioitu kaksierilaista menetelmää toteuttaa taajuushyppely, sykleissä toistuva ja satunnainen taajuus-hyppely[24]. CDMA-järjestelmässä käytetään myös taajuushyppelyä tai suorahajoitustakuten seuraavassa luvussa ilmenee.
Polarisaatiotoiste
Polarisaatiotoisteen ideana on käyttää samaa antennia tai antenniryhmää kahdella vas-takkaisella polarisaatiolla. Toistemielessä voidaan käyttää vaaka- ja pystypolarisaatiota.Kokonaan toinen asia on käyttää oikea- ja vasenkätistä ympyräpolarisaatiota eri lähe-tysten erottelemiseen toisistaan. Tämä on käytössä esimerkiksi satelliittitietoliikentees-sä. Polarisaatiotoistetta käyttämällä voidaan ehkäistä radiotien aiheuttamien polarisaa-tiomuutosten aiheuttamaa epäsovitusta. Lineaarinen polarisaatio muuttuu esteiden hei-jastusten takia tyypillisesti elliptiseksi polarisaatioksi. Jos signaali lähetetään vaakapola-risaatiolla voidaan vastaanotossa käyttää polarisaatiotoistetta, jotta saadaan siepattuamyös pystypolarisoitu signaali.

40
Vaihetoiste Kolme seuraavaksi esitettävää toistemenetelmää eli vaihetoiste, kulmatoiste ja värinä-toiste ovat läheistä sukua toisilleen ja soveltuvat hyvin käytettäväksi adaptiivisten an-tennien yhteydessä. Näissä menetelmissä pyritään vastaanottamaan eri suunnista saapu-via monitiekomponentteja tai vastaavasti valitsemaan joku näistä komponenteista.
Erilaisten amplitudikuvioiden lisäksi adaptiiviset antennit voivat muodostaa erilaisiavaihekuvioita[14]. Signaali voi saapua antenniin useaa eri tietä. Esimerkiksi linkkienvä-lisellä yhteydellä signaali saapuu tyypillisesti suoraan sekä maaheijastuksen kautta.Resultanttisignaali häipyy jos nämä kaksi signaalia ovat vastakkaisessa vaiheessa, ja nii-den amplitudit ovat yhtäsuuret. Vaihetoisteen ideana on muodostaa useita keiloja, joillaon sama amplitudi mutta eri vaihekuviot, eri suuntiin[25]. Näin saadaan lievennettyäsignaalin häipymää.
Kulmatoiste
Siirtyvässä radioliikenteessä signaalilla on useita eri reittejä tukiaseman ja päätelaitteenvälillä erilaisten esteiden vaikutuksesta. Kulmatoistetta käyttäen antenni kykenee vas-taanottamaan tehoa useasta eri suunnasta. Tällöin antennissa muodostetaan useampiakeiloja eri monitiekomponenttien saapumissuuntiin. Menetelmä sopii tästä johtuenSDMA:ssa käytettäväville adaptiivisille antenneille, jotka muodostavat keiloja eri suun-tiin.
Suuntakuviotoiste
Suuntakuviotoisteen ideana on muodostaa kaksi suuntakuviota käyttämällä kahta hei-jastinta tai vastaavasti kahta antennnia. Jos toinen suuntakuvio tuottaa esimerkiksi kaksiyhtä voimakasta mutta vastakkaisvaiheista signaalia on toisen suuntakuvion amplitudi-suhde erilainen. Näin saadaan ehkäistyä mahdollista häipymää. Kulmatoiste on taval-laan eräs suuntakuviotoistemenetelmä.
Värinätoiste
Värinätoiste on eräs keino häipymän torjumiseksi. Menetelmää on käytetty perinteisestitutkatekniikassa. Menetelmä vaatii älykkään antenniratkaisun käyttöä, joten se soveltuuantennikeilan muokkaukseen perustuvaan SDMA:han. Pääkeilaa heilutetaan maksimi-säteilysuunnan ympärillä antenniryhmän elementtien vaiheistusta muuttamalla. Näinsaadaan häipymäolosuhteita muutettua. Värinätoiste on myös keino kulmahajeen vuoksieri kulmista saapuvien signaalien vastaanottamiseen. Vaihtoehtoinen ratkaisu värinä-toisteelle on käyttää useaa hieman eri suuntiin osoittavaa keilaa[23].
3.3.2 Yhdistelymenetelmät
Eri toistemenetelmien tehojen yhdistämiseen käytetään erilaisia yhdistelymenetelmiä.Erilaisia yhdistelymenetelmiä ovat paremmuusjärjestyksessä mm. valintayhdistely[26],tasavahvistusyhdistely ja maksimisuhdeyhdistely[27]. Valintayhdistelyssä vastaanote-

41
taan signaali, jolla on paras signaali-kohinasuhde. Tasavahvistusyhdistelyssä yhdiste-tään signaalit samassa vaiheessa. Maksimisuhdeyhdistelyssä yhdistetään signaalit sa-massa vaiheessa, ja lisäksi signaaleja painotetaan eri painokertoimilla riippuen eri haa-rojen signaali-kohinasuhteista.
3.3.3 Lähetystoiste
Tukiaseman lähetystoistetta (TX-diversity) on tutkittu vähemmän kuin vastaanottotois-tetta siirtyvässä tietoliikenteessä. Viitteessä [28] on ehdotettu käytettäväksi kahta eritekniikkaa. Kahden eri antennin välinen ortogonaalisuus saavutetaan joko koodijaollatai aikajaolla. Aikajakoisuus voidaan edelleen toteuttaa kahdella eri tavalla. Menetel-millä on saatu noin 7 dB:n vahvistus verrattuna tilanteeseen ilman diversiteettiä pääte-laitteen nopeuden ollessa pieni. Mittausympäristössä päätelaitteeseen saapui vain yksimerkittävä monitiekomponentti.
Ortogonaalinen lähetystoiste
Ortogonaalinen lähetystoiste OTD (OTD = Orthogonal Transmit Diversity) hyödyntääkoodijakoista lähetystoistetta. Kaksi ortogonaalisesti koodattua signaalia lähetetään eriantenneilla. Menetelmä soveltuu CDMA-järjestelmään, jossa käytetään ortogonaalisiakoodeja. Menetelmä voidaan toteuttaa myös käyttämällä tukiasemalla antenniryhmää,jossa on parillinen määrä elementtejä (4,8,…). Tällöin joka toinen antenni lähettää toi-sella ja joka toinen toisella koodilla varustetta signaalia. Tämän takia se soveltuuSDMA-järjestelmään, jossa hyödynnetään adaptiivisia antenneja.
Aikajakoinen lähetystoiste
Aikajakoisesta lähetystoisteesta on kaksi eri versiota, aikakytkentäinen lähetystoisteTSTD (TSTD = Time Switched Transmission Diversity) ja valinnainen lähetystoisteSTD (STD = Selection Transmit Diversity). Aikakytkentäisessä lähetystoisteessajaetaan ja lähetetään signaali aikajakoisesti usealla eri antennilla. Valinnaisessa lähetys-toisteessa valitaan antenni päätelaitteen takaisinkytkennän perusteella. Kyseisiä toiste-menetelmiä on käsitelty kolmannen sukupolven matkapuhelinstandardia käsittelevässäUTRAN-do-kumentissa [28].
TSTD:ssä tarvitaan kytkentä kahdelle eri antennille suodattimineen. Lähetyksen alussakontrollikanava BCCH (BCCH = Broadcast Control CHannel) informoi päätelaitteitatukiaseman kyvystä käyttää TSTD:tä. Tämän jälkeen lähetetään kanavat DPCH (DPCH= Dedicated Physical Channels). DPCH lähetetään kytkemällä signaali vuoronperäänkummallekin antennille. Kaikki muut kanavat kuten fyysinen yleinen ohjauskanavaPCCCH (PCCCH = Physical Common Control Channel) ja synkronointikanava SCH(SCH = Synchronisation CHannel) lähetetään ilman diversiteettiä. Tukiasemalähetinvarustettuna TSTD:llä esitetään kuvassa 3.6.

42
Ant 0
Ant 1
Hajoitus Kytkin
FIR
FIR
RF
RF
EnkooderiData Lomitus
TPC
Pilotti-signaali
RI
MUX
Kuva 3.6 Tukiasemalähetin varustettuna aikajakoisella lähetystoisteella TSTD[28]
Toinen mahdollisuus on käyttää STD:tä, jossa käytetään nopeaa suljettua silmukkaoh-jausta lähetysdiversiteetissä. Jos pehmeää kanavanvaihtoa ei käytetä, tukiaseman lähe-tysantenni valitaan dynaamisesti perustuen nopeaan lähetysantennivalintaohjaussignaa-liin AS (AS = Antenna Selection), jonka päätelaite lähettää. AS-bitin arvo valitaan pe-rustuen antennikohtaisen fyysisen ohjauskanavan CPCCH (CPCCH = CommonPhysical Control Channel) mittauksiin. Tukiasemalähetin varustettuna STD:llä esitetäänkuvassa 3.7.
Ant 1
Ant 0
Hajoitus Kytkin
FIR
FIR RF
RFEnkooderi
AS
Data Lomitus
TPC
Pilottisignaalin valinta
RI
MUX
Kuva 3.7 Tukiasemalähetin varustettuna valinnaisella lähetystoisteella STD[28]
3.4 Adaptiiviset antennit
Älykkäät antenniryhmät ovat siirtyneet tutkatekniikasta langattomaan tietoliikenteeseen.Adaptiivisten antennien eduista normaaleihin antenniryhmiin verrattuna voidaan mai-nita seuraavat seikat [28]
• kapasiteetin kasvu• vähemmän interferenssiä signaalien kesken• signaalien laadun paraneminen• viivehajeen pieneneminen• lähetystehon pieneneminen• sähkömagneettisen saasteen vähentyminen• käyttäjien terveysriskin vähentyminen.
Eriasteisia älykkäitä antenniratkaisuja on kehitetty. Antenniryhmä voi olla sama jokai-sessa ratkaisussa, mutta keilanmuodostukseen käytetty ohjausyksikkö on erilainen.Erilaisia antenniratkaisuja ovat kytkentäkeilainen antenni (switched-beam antenna), mu-kautuvakeilainen antenni (beamforming antenna) ja adaptiivinen antenniryhmä (adap-tive array) järjestyksessä yksinkertaisimmasta monimutkaisimpaan [14].

43
3.4.1 Analoginen keilanmuokkaus
Analogisessa keilanmuokkauksessa käytetään keilanmuodostusverkkoa, joka sääteleeantennielementteihin tulevan signaalin vaiheita ja amplitudeja. Lisäksi tarvitaan anten-niryhmä vastaanottamaan ja lähettämään signaaleja. Keilanmuodostusverkko voidaantoteuttaa esimerkiksi aaltoputkilla, siirtojohdoilla tai hybrideillä. Keilanmuodotusver-kolla voidaan kytkeä keila kiinteisiin suuntiin. Jos halutaan useampi keila, joudutaankäyttämään monikeilaista keilanmuodostusverkkoa, jota kutsutaan keilanmuodostus-matriisiksi. Eräs käytetty keilanmuodostusmatriisi on Butler-matriisi. Analoginen kei-lanmuokkaus vaatii vain yhden lähetinvastaanottimen. Kuvassa 3.8 on esitetty eräs ana-loginen adaptiivinen antenniratkaisu, jossa keilanmuodostusverkko on toteutettu vai-heensiirtimien ja tehonjakajien avulla[29].
Antennielementit
Vaiheensiirtimet
Tehonjakajat
Rx/Tx
Vastaanotin / Lähetin
Keilanmuodostusverkko
Kuva 3.8 Analoginen adaptiivinen antenni [29]
3.4.2 Digitaalinen keilanmuokkaus
Digitaalisessa keilanmuokkauksessa DBF (DBF = Digital Beam Forming) yhdistetäänantennitekniikka ja digitaalitekniikka. DBF-antennijärjestelmä koostuu kolmesta osasta:antenniryhmästä, digitaalisista lähetinvastaanottimista ja digitaalisesta signaaliproses-sorista. Kuvassa 3.9 esitetään adaptiivinen antenni. Signaaliprosessori mahdollistaa oh-jelmallisesti toteutettavia erilaisia keilanmuokkaustapoja kuten pyyhkäisevät keilat, mo-ninkertaiset keilat, muotoiltavat keilat ja säädettävät nollakohdat[29].

44
Rx Rx Rx Rx Rx Rx
Adaptiivinen signaaliprosessointi
S1 S2 S N
Kuva 3.9 Digitaalinen adaptiivinen antenni [29]
Antennielementteihin saapuvilla päätelaitteiden lähettämillä signaaleilla on määrättyvaihe sekä amplitudi. Jokainen antennielementti vastaanottaa signaalit eri vaiheessa joh-tuen elementtien sijaintierosta. Jokaiseen elementtiin saapuu versio mobiilin lähettä-mästä signaalista. Vastaanottimet muuntavat analogiset signaalit digitaalisiksi. Vastaan-ottimet kalibroidaan usein saapuvien signaalien amplitudeihin ja vaiheisiin ohjelmal-lisesti. Vastaanotin toteuttaa taajuuden alassekoituksen, suodatuksen ja signaalin vah-vistuksen sopivaksi analogia-digitaalimuuntimelle ADC (ADC = Analog-to-DigitalConverter). Signaali jaetaan I- ja Q-haaroihin. Tämän jälkeen signaaliprosessori pai-nottaa eri elementeistä tulleita signaaleja sopivilla kompleksisilla painokertoimilla. Tä-män takia keila kääntyy mobiilin sijaintisuuntaan. Samanaikaisesti voidaan vastaanottaauseita signaaleja käyttämällä signaaleille eri painokertoimia eli eri vastaanottosuuntia.
Digitaalinen keilanmuokkaus voidaan toteuttaa kahdella eri tavalla. Voidaan käyttääelementtikytkentäistä keilanmuokkausta (Element-Space Beamforming) ja keilakytken-täistä keilanmuokkausta (Beam-Space Beamforming). Elementtikytkentäisessä keilan-muokkauksessa määrätyssä kulmassa vastaanotettua signaalia voidaan kuvata sarjalla[29]
S w ri ki
kk
K
( ) *θ ==
−
∑0
1
, (3.28)
jossa S i( )θ on määrätyssä kulmassa vastaanotettu signaali
wki on kompleksinen painokerroin
rk on tuleva signaali
* on kompleksikonjugaattii on keilaindeksi.
Elementteihin saapuvat signaalit r nk ( ) kerrotaan suoraan määrätyillä painokertoimilla.Käyttämällä erilaisia painokertoimia voidaan muodostaa sarja erilaisia keilojamäärättyihin suuntiin.
Jälkimmäisessä menetelmässä muodostetaan ensin ortogonaalisia signaaleja monikeilai-sessa keilanmuokkaimessa (multiple-beam beamformer). Keilanmuokkaimena voidaan

45
käyttää esimerkiksi FFT-prosessoria (FFT = Fast Fourier Transform). FFT-prosessorinulostulossa näkyviä ortogonaalisia signaaleja voidaan kuvata sarjalla [29]
υ θ πθ( ) /l k
j K
k
K
r e l= −
=∑ 2
1
, l K= 1,..., , (3.29)
jossa θ λl l Kd= −sin ( / )1
K on ortogonaalisten signaalien lukumääräd on antennielementtien etäisyys toisistaan.
Haluttu keila muodostuu määrätystä määrästä ortogonaalisia signaaleja. Signaaleja voi-daan kuvata sarjalla [29]
S wi mi
i mm
Mi
( ) ( )( )θ υ θ==
∑1
, (3.30)
jossa Mn on kyseiseen keilaan vaadittavien ortogonaalisten signaalien lukumääräi m( ) on keilaindeksi.
CDMA-järjestelmä voi olla joko synkroninen tai asynkroninen. Synkronisen CDMA-järjestelmän signaalien informaatiobitit on synkronoitu ajan suhteen. Eräs tukiasemallasijaitseva asynkroninen DBF-järjestelmä (DBF = Digital Beam Forming) on esitettysekä lähetys- että vastaanottosuunassa kuvassa 3.10[29]. Vastaanottosuunnassa (lähetys-suunnassa) järjestelmä sisältää
1. N-elementtisen antenniryhmän2. N kappaletta vastaanottimia (lähettimiä)3. N kappaletta analogia-digitaalimuuntimia (digitaali-analogiamuuntimia)4. N kappaletta RDBF-yksiköitä (TDBF-yksiköitä)5. N × L kappaletta digitaalisia demodulaattoreita (modulaattoreita) joista jokainen
sisäl-tää korrelaattorin ja näytteistyksen.
1
2
3
4
5
Receiver module
Receiver module
A/D
DEMOD #MRDBF #1 RDBF #M
Transmitter module
Transmitter module
D/A D/A
TDBF #1 TDBF #M
1
2
3
4
5
1
1
M 1
1
M
N N
1 N
1 1L L
S L1( )
S1 1( ) S L1 ( ) S M ( )1 S LM ( )
1 L 1 L
1 N 1 N
1 M 1 M
1 N
• • • • • •
• • • • • •
• • • • • •
• • •
• • •
• • •
• • •
• • •
• • •
A/D
MODMODMOD MOD
RDBF #1 RDBF #M
• • • • • •
• • •• • •DEMOD DEMOD DEMOD DEMOD
w t1 1( ) w t L1( ) w tk ( )1 w tk L( )

46
Kuva 3.10 Vastaanottosuunnan DBF-yksikkö CDMA-järjestelmässä vasemmalla ja lä-hetyssuunnan DBF-yksikkö CDMA-järjestelmässä oikealla.[29]
Kuvan mukaisessa DBF-järjestelmässä jokainen keilanmuodostusverkko muodostaa Lkeilaa eli järjestelmä voi palvella M × L käyttäjää samanaikaisesti. Modulaatio- sekä de-modulaatioprosessi voi olla sekä lineaarinen että epälineaarinen ja koherentti tai epäko-herentti. Painokertoimet w1…wk toimivat keilanmuokkauksen referenssinä.
3.4.3 Adaptiiviset keilanmuodostustavat CDMA-järjestelmässä
Adaptiivinen keilanmuodostus uplink-suunnassa
Adaptiivista keilanmuokkausta uplink-suunnassa on perinteisesti käytetty kaukokartoi-tuksessa sekä tutkatekniikassa. Tekniikka on siirtynyt näistä sovelluksista siirtyvään tie-toliikenteeseen. Adaptiivinen keilanmuokkain on laite, joka erottelee häiritsevät sig-naalit hyötysignaalista. Adaptiivinen keilanmuokkaus on kehittyneempi versio digitaa-lisesta keilanmuokkauksesta siinä käytetyn optimointialgoritmin vuoksi.
Keilanmuokkaaja on adaptiivinen prosessori, joka muokkaa kompleksisia painokertoi-mia käyttäen jotain optimointialgoritmia. Määrätyillä painokertoimien valinnalla saa-daan hyötysignaali vastaanotettua ja häiritsevien signaalien vaikutusta vaimennettua.Painokertoimien valintaan on olemassa erilaisia menetelmiä, kuten [29]
• keskineliövirheen minimointi (Minimum Mean-Square Error)• signaalihäiriösuhteen maksimointi (Maximum Signal-to-Interference Ratio)• varianssin minimointi (Minimum Variance).
Uplink-suunnassa kanavainformaatio on saatavilla toisin kuin downlink-suunnassa. Ky-seiseen suuntaan on helpompaa kehittää keilanmuokkaustekniikoita ja algoritmeja mo-nitiehäiriöitä sekä saman kanavan häiriöitä vastaan. Adaptiivisen algoritmin valinta rat-kaisee konvergoitumisnopeuden sekä laitteiden monimutkaisuuden. Se ei vaikuta kovinpaljon järjestelmän hyötysuhteeseen, koska algoritmit ovat läheistä sukua toisilleen.Käytettyjä adaptiivisia algoritmeja ovat [29]
• LMS-algoritmi (LMS = Least Mean Squares)• SMI-algoritmi (SMI = Sample-Matrix Inversion)• RLS-algoritmi (RLS = Recursive Least Squares).
LMS-algoritmi on näistä yleisin. LMS- ja RLS-algoritmeilla on konvergoitumisongel-mia, jos kovarianssimatriisin SCM (SCM = Sample Covariance Matrix) ominaisarvoteroavat suuresti toisistaan. Kovarianssimatriisi R määritellään [29]
R E r t r tH= ( ) ( ) , (3.31)
jossa r t( ) on antennielementeistä saapuva signaali. Edellä mainitut sopivat hitaastimuuttuviin kanavaolosuhteisiin konvergoitumisongelmien vuoksi. SMI-algoritmin kon-
47
vergoituminen taas on melkein riippumatonta ominaisarvojen hajonnasta. Tämän vuoksikyseinen algoritmi suoveltuu paremmin nopeasti muuttuviin kanavaolosuhteisiin kuinedelliset.
Adaptiivinen keilanmuodostus sopii hyvin CDMA-järjestelmään koska hajoituskoodejavoidaan käyttää keilanmuodostuksen referenssinä. Tehokas tapa vastaanottaa eri kul-missa ja erilaisilla viiveillä saapuvat signaalit on käyttää RAKE-vastaanottimen ja adap-tiivisen keilanmuokkauksen yhdistelmää CDMA-järjestelmässä. Signaalit vastaanote-taan käyttäen digitaalisia koodisovitettuja suodattimia, jotka ehkäisevät saman kanavanhäiriöiden syntymistä. Signaalit saapuvat keilanmuokkaimeen, joka painottaa niitä eripainokertoimilla käyttäen esimerkiksi edellä mainittuja optimointialgoritmeja.
Adaptiivinen keilanmuodostus downlink-suunnassa
Adaptiivista keilanmuokkausta downlink-suunnassa on tutkittu vahemmän kuin uplink-suunnassa. Jos kanavan siirtofunktio downlink-suunnassa tunnetaan voidaan Signaali-häiriö ja kohinasuhde SINR (SINR = Signal-to-Interference-plus-Noise Ratio) maksi-moida kertomalla haluttu signaali joukolla painokertoimia. Viitteessä [29] osoitetaanpainokertoimien olevan skaalattu versio uplink-suunnan painokertoimista olettaen taa-juuden olevan saman, sekä kanavan pysyvän muuttumattomana kumpaankin suuntaan.
Painokertoimien uusiokäyttöä voidaan harrastaa TDD-menetelmässä, mutta se soveltuuhuonosti FDD-menetelmään, koska tässä menetelmässä lähetys- sekä vastaanottotaajuuseroavat toisistaan huomattavasti. Tämän johdosta myös siirtofunktiot ovat erilaisia.Downlink-suunnan keilanmuokkauksessa on ongelmana kanavan siirtofunktion esti-mointi.
Takaisinkytkentätekniikkaa on ehdotettu käytettäväksi viitteessä [30]. Tässä menetel-mässä tukiasema lähettää mittasignaaleja downlink-taajuudella. Jokainen solun alueellaoleva mobiili vastaanottaa mittasignaaleja ja lähettää näiden perusteella informaatiotakanavan siirtofunktiosta tukiasemalle. Tämän perusteella tukiasema voi muokata paino-kertoimia lähetykseen soveltuviksi. Johtuen mittasignaalien lähettämiseen käytetystäajasta, menetelmä soveltuu ympäristöihin joissa kanavan olosuhteet muuttuvat hitaasti.
Mobiili voi myös suoraan lähettää downlink-taajuudella testisignaalia, jonka perusteellapainokertoimet muokataan. Tällöin uplink-suunnan lähetys ei häiriinny. Tässä tapauk-sessa mobiilin tekniikka monimutkaistuu. Lisäksi tukiaseman päässä tarvitaan edelleenuudenlaista protokollaa sekä signaalinkäsittelyä.
Saapumiskulmaan AOA (AOA = Angle-of-Arrival) perustuvaa informaatiota on ehdo-tettu käytettäväksi viitteessä [31]. Vaikka siirtofunktiot ovat erilaisia uplink- ja down-link-suunnissa etenemistiet ovat jokseenkin samoja. Perustuen AOA-informaatioondownlink-painokertoimet toteutetaan maksimoiden SINR.
Eräs mahdollisuus on käyttää useita kiinteitä keiloja tukiasemalla sekä lähetyksessä ettävastaanotossa[32]. Tukiasema havaitsee voimakkaimman uplink-vastaanottosuunnan jakaikki teho lähetetään tähän suuntaan. Järjestelmää voidaan parantaa käyttämällä älyk-käämpiä antenniratkaisuja, joita käsiteltiin aikaisemmin. Tällöin keila voidaan kääntäätarkasti parhaaseen lähetyssuuntaan. Menetelmä ei ole optimaalinen, mutta mobiilinSINR-tasoa voidaan näin parantaa[32]. Näin saadaan todennäköisyys syvän häipymänesiintymiselle pieneksi.

48
Tukiasemapäässä teho ei ole teknisesti kriittinen tekijä, ja tukiaseman lähetystehoa voi-daan tarvittaessa nostaa. Vastakohta on uplink-suunta, koska mobiili lähettää rajoitetullateholla ja melkein ympärisäteilevällä antennilla. Teho saapuu tukiasemalle useita erireittejä, ja nämä useita eri teitä saapuneet signaalit tulisi voida hyödyntää mahdollisim-man tehokkaasti.

49

50
4 Kanavajakojärjestelmät
Tässä luvussa käsitellään eri kanavajakojärjestelmiä. Perinteiset menetelmät kuvataanmelko lyhyesti. WCDMA:ta käsitellään laajemmin. Lisäksi käsitellään RAKE-vastaan-otinta, monen käyttäjän ilmaisua ja lopuksi WCDMA:n ja SDMA:n yhteiskäyttöä.
4.1 Perinteiset menetelmät
4.1.1 Taajuusjakoinen monikäyttömenetelmä FDMA
Maanpäällisessä siirtyvässä tietoliikenteessä on perinteisesti käytetty kahta erilaista ka-navajakotekniikkaa. Nämä ovat taajuusjakoinen monikäyttömenetelmä FDMA (FDMA= Frequency Division Multiple Access) ja aikajakoinen monikäyttömenetelmä TDMA(TDMA = Time Division Multiple Access). Lisäksi FDMA:sta on kehittyneempi muun-nelma nimeltään ortogonaalinen taajuusjakoinen monikäyttömenetelmä OFDMA(OFDMA = Orthogonal Frequency Division Multiple Access).
FDMA:ssa jokaisella kanavalla on oma kantoaalto eli oma taajuus käytettävänään. Yksikäyttäjä käyttää yhtä kanavaa kerrallaan. FDMA:ta on käytetty perinteisesti kapea-kaistaisissa analogisissa järjestelmissä. Kaksisuuntaisen liikenteen erottelemiseen onkäytetty FDMA/FDD-järjestelmää (FDD = Frequency Division Duplex), jossa käy-tetään eri taajuutta lähetyksessä ja vastaanotossa.
Kanavien määrän ollessa suuri, FDMA:n järjestelmäkustannukset ovat suuremmat kuinTDMA:ssa suuren kaistanpäästösuodattimien tarpeen vuoksi [3]. Lisäksi kyseinen jär-jestelmä tuhlaa kapasiteettia kanavan ollessa jatkuvasti käytössä hyötysignaalin katko-naisuudesta huolimatta. Toisaalta analoginen FDMA on yksinkertaisempi toteuttaa kuinTDMA. FDMA-järjestelmällä on korkeammat kustannukset solua kohti verrattunaTDMA-järjestelmään jokaisen kantoaallon sisältäessä vain yhden kanavan. Esimerkkinäanalogisen FDMA:n soveltamisesta mainittakoon USA:ssa aikanaan käyttöön otettuanaloginen matkapuhelinjärjestelmä AMPS (AMPS = Advanced Mobile Phone System)joka perustuu FDMA/FDD-järjestelmään. FDMA-järjestelmää on käsitelty viitteessä[3]. FDMA:n kanavajako on esitetty kuvassa 4.1.
Koodi
Aika
Taajuus
Kan
ava
1
Kan
ava
3
Kan
ava
N
Kan
ava
2
Kuva 4.1 FDMA:n kanavajako [3]
FDMA:ta käytetään myös digitaalisissa järjestelmissä. Kehittyneemmissä digitaalisissajärjestelmissä kaksisuuntaisen liikenteen erottelemiseen käytetään FDMA/TDD-jär-jestelmää (TDD = Time Division Duplex) jossa puolet kehyksen aikaväleistä on lähe-

51
tyksessä ja puolet vastaanotossa. FDMA/TDD-järjestelmä on käytössä esimerkiksi CT2-standardissa (CT = Cordless Telephone)[3].
FDMA:sta on myös kehittyneempi versio nimeltään ortogonaalinen taajuusjakoinenmo-nikäyttömenetelmä OFDMA (OFDMA = Orthogonal Frequency Division MultipleAccess). Tässä signaali jaetaan satojen rinnakkaisten kantoaaltojen kesken yli 1 MHz:nkaistalle. Kantoaaltojen väli on symbolin keston käänteisluku ja signaalit ovat keske-nään ortogonaalisia. Lähettimellä on oltava laaja dynamiikka monitaajuisen signaalinvaihdellessa ajan funktiona erittäin voimakkaasti. OFDMA on käytössä esimerkiksi Eu-rooppalaisessa HIPERLAN-standardissa (HIPERLAN = High Performance Radio LocalArea Network)[33].
4.1.2 Aikajakoinen monikäyttömenetelmä TDMA
TDMA:ssa signaali kulkee aikajakoisina kehyksinä, jotka ovat edelleen jakautuneetaikaväleihin. Jokaisella käyttäjällä on joku tai joitakin aikavälejä kehyksestä käytössään.Sama kantoaalto on käytössä useammalla kanavalla. Kanavajako on esitetty kuvassa4.2. Kantoaalto on tehokkaammin hyödynnetty joutoajan ollessa pienempi kuin FDMA-järjestelmässä. Järjestelmä on digitaalinen, joten se vaatii digitaalisen modulaatiome-netelmän käyttöä.
Aika
Kanava 1Kanava 2
Kanava 3
Kanava N
Aikavä
lit
Koodi
Taajuus
Kuva 4.2 TDMA:n kanavajako [3]
Data lähetetään aikajakoisissa purskeissa, joten lähettimen ei tarvitse olla päällä jat-kuvasti. Näin säästetään tehonkulutuksessa, ja lisäksi tukiaseman vaihto on helpompaa,koska päätelaite voi kuunnella viereistä asemaa lähetysten välissä. Mukautuvaa taa-juuskorjainta tarvitaan TDMA-järjestelmässä siirtonopeuden ollessa melko korkea ver-rattuna FDMA:han. Aikajakoisuudesta johtuen käyttäjien prioriteettitasoa voidaan sää-dellä kehyksien määrällä. TDMA:ssa kehyksien synkronointi on teknisesti vaativaa.
Esimerkkinä esitetään Eurooppalaisen digitaalisen GSM-järjestelmän (GSM = GlobalSystem of Mobile Communication) kehysrakenne kuvassa 4.3. Kehysrakenne koostuuhyperkehyksestä, superkehyksistä, monikehyksistä ja kehyksistä. Superkehystä ei esiin-ny kuvassa 4.3. Kehyksessä olevien aikavälien määrä riippuu eri tekijöistä, kutenmodulaatiomenetelmästä sekä kaistanleveydestä. Jokaisella aikavälillä on myös omakehysrakenteensa kuvan 4.3 mukaan. Eri järjestelmien kehysrakenteet saattavat erotatoisistaan huomattavasti.
Kaksisuuntaisen liikenteen erottelemiseen käytetään kahta eri menetelmää kutenFDMA:ssa. TDMA/TDD-järjestelmässä (TDD = Time Division Duplex) puolet ke-hyksen aikaväleistä on lähetyksessä ja puolet vastaanotossa. TDMA/FDD-

52
järjestelmässä (FDD = Frequency Division Duplex) käytetään eri taajuutta lähetyksessäsekä vastaanotossa. TDMA-monikäyttöjärjestelmä on käytössä GSM:n lisäksi esimer-kiksi Pohjoisamerikkalaisessa digitaalisessa USDC-järjestelmässä (USDC = U. S. Digi-tal Cellular). TDMA-monikäyttöjärjestelmää on käsitelty viitteessä [3].
1 2 3 8• • •
1 2 3 • • •
1 2 3 • • •
26
51
6,12 s
120 m s
4,615 m s
576,92 us
H äntä-bitit
H äntä-bitit
D ata D ata Suoja-bitit
O petusjakso
Superkehys
M onikehys
K ehys
A ikaväli
Kuva 4.3 GSM:n TDMA-kehysrakenne [3]
4.2 Laajakaistainen koodijakoinen monikäyttömenetel-mä
4.2.1 Koodijakoinen monikäyttömenetelmä CDMA
Koodijakoinen monikäyttömenetelmä CDMA (CDMA = Code Division MultipleAccess) perustuu hajaspektritekniikkaan. Käyttäjät erotellaan toisistaan ortogonaalisillakoodeilla, kuten esimerkiksi PN-koodilla (PN = Pseudo Noise). Spektri levitetääntavallisesti joko taajuushypinnällä FH (FH = Frequency Hopping) tai suorahajotusme-netelmällä DS (DS = Direct Sequence)[34]. DS on siviilikäytössä yleisempi. Kuvassa4.4 on esitetty CDMA:n kanavajakoperiaate.
Siiryvässä tietoliikenteessä ongelmia aiheuttaa monitie-eteneminen ja muiden pääte-laitteiden aiheuttamat häiriöt. CDMA:lla on monia etuja perinteisesti käytettyihin mene-telmiin verrattuna. CDMA esimerkiksi sietää muita menetelmiä paremmin monitieete-nemisen aiheuttamaa selektiivistä häipymistä. Lisäksi taajuuskorjain voidaan korvatakorrelaattorilla, joka on halvempi vaihtoehto[35]. Kanavanvaihto solusta toiseen on hel-pompaa saman taajuuskanavan ollessa käytössä jokaisessa solussa[35]. Tässä on mai-nittu vasta muutamia etuja FDMA:han ja TDMA:han verrattuna. Viitteessä [35] on täy-dellisempi luettelo aiheesta.
CDMA:n eduista huolimatta sillä on myös määrättyjä ongelmia. CDMA:n eräs haitta-puoli on koodisynkronoinnin vaikeus. Lisäksi sillä on monikäytöstä aiheutuvien häi-riöiden MAI (MAI = Multiple-access interference) aiheuttamia ongelmia.
CDMA:ssa kaikki päätelaitteet lähettävät signaalia yhtäaikaisesti. Tämä aiheuttaa lähi-kauko-ongelmia. Ongelma aiheutuu useiden mobiilien jakaessa saman kanavan. Mobii-lin lähettämän signaalin taso tukiasemalla on luonnollisesti riipuvainen mobiilin etäi-syydestä tukiasemaan nähden olettaen kaikkien mobiilien lähettävän samalla teho-tasolla. Ilman tehonsäätöä tukiaseman laidalla oleva mobiili on huonommassa asemassakuin lähempänä oleva. Käytettäessä tehonsäätöä tukiasema tarkkailee mobiilien lähet-tämiä signaaleja lähettäen tämän perusteella tietoja tehonsäädöstä. Tämän perusteella

53
mobiili säätelee lähettämäänsä signaalia, joten tukiasemalle saapuu samantehoisia sig-naaleja. Näin kaikki mobiilit ovat samassa asemassa. Tehonsäätö ehkäisee toisin sanoenlähikauko-ongelmia. Solun ulkopuolelta tuleviin häiriöihin tehonsäätö ei vaikuta, koskatukiasema ei pysty vaikuttamaan solun ulkopuolisten mobiilien tehotasoihin[3]. Lähi-kauko-ongelmista johtuen CDMA:ssa tarvitaan nopeaa tehonsäätöä päätelaitteen lähe-tyssuunnassa.
CDMA-järjestelmän kannalta muut käyttäjät edustavat kohinaa. Käyttäjien määrän li-sääntyessä kohinataso kasvaa ja signaalin laatu huononee. Käytettävyys siis huononeetai paranee lineaarisesti käyttäjien määrän vaihdellessa[3]. Monen käyttäjän ilmaisunMUD (MUD = Multi User Detection) vaikutuksesta käytettävyys huononee vähemmänkuin käytettäessä yhden käyttäjän ilmaisua. Lisäksi MUD lievittää edellä kuvattua lähi-kauko-ongelmaa[5]. Monen käyttäjän ilmaisua on käsitelty kohdassa 4.5.
Taajuus
Aika
Koodi
Kanava 2Kanava 3
Kanava N
Kanava 1
Kuva 4.4 CDMA:n kanavajako [3]
4.2.2 Laajakaistainen CDMA (WCDMA)
Kolmannen sukupolven matkapuhelinjärjestelmässä UMTS (UMTS = Universal MobileTelecommunications Service) on mahdollista puheen lisäksi siirtää eritasoisia multi-mediapalveluja. Laajakaistaista koodijakoista monikäyttömenetelmää WCDMA(WCDMA = Wideband Code Division multiple Access) on ehdotettu käytettäväksi ky-seisessä matkapuhelinjärjestelmässä. Laajakaistaisessa koodijakoisessa monikäyttö-menetelmässä datan siirtonopeutta on nostettu IS-95-standardin mukaiseen DS-CDMA-järjestelmään verrattuna. Tällöin signaalin kaistanleveys on kasvanut. Signaalin laatupysyy stabiilimpana suuremmasta siirtonopeudesta johtuen. Suuremman siirtonopeudenansiosta WCDMA soveltuu paremmin multimediapalvelujen lähetykseen päätelaitteidenmäärän vaihdellessa[36].
Moninopeuksinen tiedonsiirto on WCDMA:ssa toteutettu erilaisilla hajoituskertoimillasekä useilla erilaisilla koodeilla sekä uplink- että downlink-suunnassa. Dupleksointime-netelmänä on ehdotettu käytettäväksi taajuusjakoista dupleksointia FDD[1].
Uplink-suunnassa lähetetään ortogonaalisesti koodatut fyysinen datakanava DPDCH(DPDCH = Dedicated Physical Data CHannel) ja fyysinen kontrollikanava DPCCH

54
(DPCCH = Dedicated Physical Control CHannel). Data hajoitetaan kanavointikoodeilla(cD, cC) leveämmälle kaistalle. Eri pituiset kanavointikoodit mahdollistavat eritasoistenpalvelujen lähetyksen. Tämän jälkeen I ja Q-haarat yhdistetään ja yhdistetty datasekoitetaan päätelaitekohtaisella sekoituskoodilla (cS). Suodatuksen (p(t)) jakantoaaltoon sekoituksen jälkeen signaali lähetetään radiokanavaan. Datan hajoitus jamodulaatio on esitetty kuvassa 4.5.
p t( )
cos( )ωt
sin( )ωt
× j
cD
cC
p t( )
I
Q
I+jQ
Real
Imag
DPDCH
DPCCH
cs
Kuva 4.5 Datan hajoitus ja modulaatio uplink-suunnassa[5]
Uplink-suunnan kehysrakenne on esitetty kuvassa 4.6. Kehysrakenne on jaettu super-kehyksiin, kehyksiin ja edelleen pienempiin aikaväleihin. Superkehyksen pituus uplink-suunnassa on 720 ms sisältäen 72 kehystä. Kehys on 10 ms pitkä sisältäen 16 0,625 mspituista aikaväliä, joilla on edelleen oma rakenteensa. Aikavälin pituus on yhdentehonsäätöperiodin pituinen. Jokaisessa aikavälissä kulkevat ortogonaalisesti koodeillaerotellut data- ja kontrollikanavat. Aikavälissä siirrettyjen bittien määrä noudattaa kaa-vaa 10 2× k , jossa k (k = 0,1,…,6) määrää lähetettyjen bittien lukumäärän. Bittinopeusvaihtelee siis välillä 16 kbit/s–1,024 Mbit/s. Kanavointikoodauksen, eli leveämmällekaistalle sekoituksen, jälkeen siirtonopeudeksi saadaan 4,096 Mchip/s. Siirtonopeusmuodostuu hajoituskertoimen SF perusteella, joka määritellään SF = 256/2k. Kont-rollikanava on edelleen jaettu aikajakoisesti sisältäen pilottisignaalin, lähetyksen tehon-säädön TPC (TPC = Transport Power Control) ja lähetysmuodon indikaattorin TFI (TFI= Transport Format Indicator).
Data
Pilottisignaali TPC TFI
Aikaväli 1
Kehys 1
DPCCH
DPDCH
0,625 ms
10 ms
720 ms
Aikaväli 2 Aikaväli i Aikaväli 16
Kehys 1 Kehys 2 Kehys i Kehys 72
Kuva 4.6 Kehysrakenne uplink-suunnassa[5]Downlink-suunnassa datalle tehdään ensin sarja/rinnakkaismuunnos (S→P). Jokaisessaaikavälissä lähetettyjen bittien määrä noudattaa kaavaa 20 2× k , jossa k määritellään ku-ten downlink-suunnassa. Data hajoitetaan kanavointikoodilla (cK) leveämmälle kaistalle.Hajoituksen jälkeen datan siirtonopeus on 4,096 Mchip/s. I ja Q-haaroissa käytetäänsamaa kanavointikoodia toisin kuin uplink-suunnassa. Tämän jälkeen data sekoitetaanpäätelaitekohtaisella sekoituskoodilla (cS) kuten tehtiin myös uplink-suunnassa.

55
Suodatuksen ja kantoaaltoon sekoituksen jälkeen signaali lähetetään radiokanavaan.Datan hajoitus ja modulaatio on esitetty kuvassa 4.7.
sin( )ωt
cos( )ωt
p t( )
p t( )
I
Q
S P→DPDCH/DPCCH
cScK
Kuva 4.7 Datan hajoitus ja modulaatio downlink-suunnassa[5]
Downlink-suunnassa lähetetään fyysinen datakanava DPDCH ja fyysinen kontrollika-nava DPCCH eroteltuina aikajakoisesti toisistaan. Kehyksien pituus on sama kuin up-link-suunnassa kuvan 4.8 mukaisesti.
DPDCHDPCCH
P.sign. TPC TFI Data
Aikaväli 1 Aikaväli 2 Aikaväli i Aikaväli 16
Kehys 1 Kehys 2 Kehys i Kehys 72
720 ms
10 ms
0,625 ms
Kuva 4.8 Kehysrakenne downlink-suunnassa[5]
Saadakseen täyden hyödyn WCDMA-järjestelmän kapasiteetista samaa kantoaaltotaa-juutta tulee käyttää uudelleen jokaisessa solussa. Tämä vaatii pehmeää kanavanvaihtoa(SOHO = SOft Hand-Over) solujen rajoilla, jotta vältytään solujen välisiltä häiriöil-tä[37]. Taulukkoon 4.1 on kerätty WCDMA:n keskeiset ominaisuudet.

56
Taulukko 4.1 WCDMA:n keskeiset ominaisuudet ( UL = uplink, DL = downlink )[1]
TEKNISET TIEDOTMonikäyttömenetelmä DS-CDMAKahdennusmenetelmä FDDChippinopeus 4,096 Mchip/sKehyksen pituus 10 msKantoaaltojen väli 5, 10, 20 MHzKäyttäjien erottelu Erilaiset hajoituskoodit ja monikoodausHajoituskertoimet 4-256Hajoitusmodulaatio QPSKHajoituskoodit Gold-kooditDatan modulaatiomenetelmä UL: BPSK , DL: QPSKChippisuodatus Kohokosini, roll-of = 0,2Kanavanvaihto Pehmeä kanavanvaihto, taajuuksien välinen kanavan-
vaihtoIlmaisu Koherentti ilmaisu (UL ja DL)Dynaaminen alue UL: 80 dB, DL: 30 dBTehon säätö Avoin silmukka ja suljettu silmukka (UL ja DL)Diversiteetti RAKE, UL antennidiversiteettiTukiasemasynkronointi Asynkroninen
4.3 Paikkajakoinen monikäyttömenetelmä SDMA
4.3.1 Soluihin perustuva SDMA
Soluihin perustuva paikkajakoinen monikäyttömenetelmä SDMA on perinteisesti käy-tetty menetelmä siirtyvässä radioliikenteessä. Alue on jaettu soluihin joiden kantoaalto-taajuus toistuu määrätyin väliajoin. Suurta käyttäjämäärää voidaan näin palvella tehok-kaasti. Samaa taajuutta käyttävien solujen tulee olla riittävän etäällä toisistaan, jotta neeivät häiritsisi toisiaan[38]. Radiokapasiteetti Cr määritellään[39]
CM
Kr
f
s
= [kanavaa/solu], (4.1)
jossa M f on eri taajuuskanavien lukumäärä
Ks on solun monikäyttökerroin.
Edelleen solun monikäyttökerroin Ks määritellään [39]
Kr
RsD=
1
3
2
, (4.2)
jossa rD on samaa taajuuskanavaa edustavien solujen välinen etäisyysR on ympyränmuotoisen solun säde.

57
Kehittynempi versio soluihin perustuvasta SDMA:sta saadaan jakamalla solu sek-toreihin käyttämällä suuntaavia antenneja. Radiokapasiteetti Cr määritellään tässä ta-pauksessa [39]
CM
K Sr
f
s n
= [kanavaa/sektori], (4.3)
jossa Sn on solun sektoreiden lukumäärä. Kuvassa 4.9 on esitettynä solukko-SDMA:neräs solurakenne, sekä kuvaus sektorista eräässä solussa. Tässä tapauksessa käytetäännelisolurakennetta, jossa solu on jaettu kuuteen 60º sektoriin. Toinen esiintyvä solura-kenne on seitsemän solun rakenne, jossa solu on jaettu kolmeen 120º sektoriin[29].Käytettäessä solun sektorointia saadaan vähennettyä interferenssiä eli SIR kasvaasektoreiden määrän kasvaessa. Soluihin perustuvasta SDMA:sta on kuvaus viittees-sä[29].
4
1
2
1
3
4
3
2
1
2
3
4
3
4
1
2
1
2
Kuva 4.9 Solukko-SDMA:n eräs solurakenne sekä kuvaus sektorista eräässä solussa[29]
4.3.2 Keilanmuodostukseen perustuva SDMA
Kehittyneempi versio SDMA:sta on käyttää säädettäviä kapeakeilaisia antenniryhmiä eliadaptiivista keilanmuokkausta jota käsiteltiin edellisessä luvussa. Samaa taajuutta käy-tetään koko solun alueella, joten kapasiteetti kasvaa äskeiseen verrattuna. Kapasiteetiksivoidaan määritellä[39]
CN M
Kr
f f
s
= [kanavaa/solu], (4.4)
jossa Nf on samaa taajuutta käyttävien mobiilien määrä solussa ja muut suureet määri-tellään kuten kaavassa 4.1. Kuvassa 4.10 on esitetty seitsemän solun rakenne, jossa jo-kainen solu palvelee viittä eri käyttäjää.
6
7
3
1 5
2 4
Kuva 4.10 Adaptiiviseen keilanmuokkaukseen perustuva SDMA [29]

58
Pahimmassa tapauksessa SIR voi nousta yhtä suureksi kuin ympärisäteilevässä tapauk-sessa. Pahin tilanne syntyy, jos kaikki saman kanavan solut häiritsevät yhtäaikaisesti.Toisin sanoen, jos kuvan 4.10 solussa 1 on päätelaite ja muissa samaa taajuutta käyt-tävissä soluissa (muut ykkössolut) sattuu joku keiloista olemaan suunnattu kyseisenpäätelaitteen suuntaan. Tämä on erittäin epätodennäköistä kapeiden keilojen ollessa ky-seessä. Toisin sanoen mukautuva keilanmuodostus tuottaa hyvän isolaation saman kana-van käyttäjien välille, koska antenniryhmä voi asettaa nollakohdan häiritsevään suun-taan. Adaptiivisesta antennikeilan muokkaukseen perustuvasta SDMA:sta on kuvausliitteessä [29].
Keilanmuokkaukseen perustuvassa SDMA:ssa etenemisympäristön vaikutusten tunte-mus on tärkeämpää kuin aikaisemmissa järjestelmissä, koska käyttäjät erotellaan toisis-taan signaalin suunnan perusteella. Tärkeitä tekijöitä kyseisessä järjestelmässä ovat[23]:
• Kulmahaje• Tehollinen sivukeilataso• Suuntaavien antennien vaikutus viivehajeeseen• Korreloimattomien monitiekomponenttien määrä• Tehollinen vahvistus
Antennikeilan muokkaukseen perustuvassa SDMA:ssa on kulmahaje pienempi kuin so-luihin perustuvassa SDMA:ssa, koska edellisessä vastaanottoantennin pääkeila on ka-peampi kuin jälkimmäisessä järjestelmässä. Tästä voi päätellä soluihin perustuvallaSDMA:lla olevan suurempi häipymän vaara kuin keilan muokkaukseen perustuvallaSDMA:lla, koska samaan keilaan tulee enemmän monitiekomponentteja jotka interfe-roivat keskenään. Kapeammalla keilalla saadaan eroteltua eri monitiekomponentteja.Tällöin signaalin kulmahajeen tuntemus on tärkeää. Eri monitiekomponenttien yhdis-tämiseksi voidaan käyttää edellisessä luvussa esitettyjä toistemenetelmiä tai CDMA:hanhyvin soveltuvaa RAKE-vastaanotinta, jota tarkastellaan seuraavaksi.
4.4 RAKE-vastaanotin
Monitie-etenemisen vuoksi radiokanavalla esiintyy useita viivästyneitä monitiekom-ponentteja lähetetystä signaalista, kuten edellä mainittiin. RAKE-vastaanotin kykeneeerottelemaan määrätyillä viiveillä saapuneet signaalit käytettäessä hyvät autokorre-laatio-ominaisuudet omaavia koodeja. Tällöin RAKE-vastaanotin kykenee erottelemaanvähintään yhden chipin verran viivästyneet signaalit toisistaan. Tästä johtuen RAKE-vastaanottimen monitiekomponenttien erottelukykyyn vaikuttaakin käytetty siirtonope-us eli chipin pituus. WCDMA:n suuren siirtonopeuden ansiosta RAKE-vastaanotinsoveltuu hyvin kyseiseen järjestelmään. RAKE-vastaanotin on esitetty kuvassa 4.11.

59
Korrelaattori 1
Korrelaattori 2
Korrelaattori M
Z1
Z2
Z M
∑r t( ) Z '
• • •
w1
w2
wk
Kuva 4.11 RAKE-vastaanotin[3]
Jokainen monitiekomponentti on synkronoitu omalle korrelaattorilleen kuvan 4.11 mu-kaisesti. Korrelaattorit vastaanottavat M voimakkainta monitiekomponenttia suuruus-järjestyksessä suurimmasta pienimpään. Korrelaattoreiden ulostuloja merkitäänZ1,Z2,…,ZM. Ulostulot on painotettu kertoimilla w w wM1 2, ,..., . Painotuskertoimia sää-detään joko vastaanotetun tehon tai signaalikohinasuhteen SNR (SNR = Signal-to-NoiseRatio) mukaan. Vastaanotettu jännite on monitiekomponenttien summa [3], eli
Z w Zm mm
M' =
=∑
1
(4.5)
jossa
Z ' on kokonaisjännitewm on painokerroinZm on korrelaattorin ulostulojännite.
Adaptiivisten tehonsäätäjien sekä diversiteettiyhdistäjien tapauksessa on monia tapojaasettaa painokertoimet. RAKE-vastaanotinta on käsitelty viitteessä [3].
RAKE-vastaanottimella on parempi käytettävyys yksihaaraiseen hajaspektrivastaanot-timeen verrattuna johtuen monitiediversiteetistä[4], joten RAKE-vastaanotinta voidaan-kin pitää eräänä diversiteettimenetelmänä. Kyseisellä vastaanottimella saadaan kerättyäenemmän hyötytehoa, koska vastaanotetaan useampia monitiekomponentteja.
Viitteessä [40] vertaillaan 2D-RAKE-vastaanotinratkaisuja perustuen korrelaatiomatrii-sin kokoon. 2D-RAKE-vastaanottimessa käytetään suuntaavaa antennia, joten signaale-ja pystytään erottelemaan sekä ajan että suunnan funktiona. Mitä pienempi korre-laatiomatriisin koko, sitä vähemmän tarvitaan laskentatehoa ja konvergoituminen on no-peampaa. Korrelaatiomatriisin kokoa voidaan pienentää vähentämällä vastaanotettujamonitiekomponentteja. Yksinkertaistamisen hinta maksetaan pienempänä SINR-arvona.

60
4.5 Monen käyttäjän ilmaisu MUD
Monen käyttäjän ilmaisussa MUD (MUD = Multi User Detection) eri käyttäjien signaa-lit ilmaistaan yhtäaikaisesti. Kuvassa 4.12 esitetään monen käyttäjän ilmaisun idea.CDMA-monikäyttömenetelmässä datavektori
[ ]b b b bN= 1 2, ,..., (4.6)
hajoitetaan leveämmälle taajuuskaistalle ortogonaalisilla koodeilla S. Monen käyttäjänilmaisuun soveltuvat parhaiten koodit, joiden ristikorrelaatio-ominaisuudet ovat mah-dollisimman hyvät. Näillä saavutetaan mahdollisimman hyvä erottelu eri käyttäjienvälille. Radiotiellä signaaliin summautuu kohinaa n. Kanavan olosuhteet ja päätelait-teiden paikat tukiasemasolussa vaikuttavat vastaanotettuun signaaliin ja näiden vaiku-tusta kuvataan matriisilla A. Vastaanotin vastaanottaa signaalin, joka on summa erikäyttäjien signaaleista ja summautuneesta kohinasta. Eri käyttäjien signaalit erotellaantoisistaan joukolla korrelaattoreita[41]. Monen käyttäjän ilmaisimelle saapuu korrelaa-ttoreilta signaali
y RAb n= + (4.7)
jossa
R S ST= . (4.8)
Monen käyttäjän ilmaisuun on kehitetty useita erilaisia algoritmeja. Ilmisin voi olla jokooptimaalinen tai alioptimaalinen. Myös muita jakoja on esitetty perustuen käytettyynilmaisualgoritmiin[5]. Eräs datan ilmaisukeino on kertoa signaali korrelaatiomatriisin Rkäänteismatriisilla, jolloin saadaan estimaatti
R b Ab nR− −= +1 1 , (4.9)
signaalista[42], jossa
[ ]R b b b bN− =1
1 2
, ,..., . (4.10)
,'
.RRGL
.RRGL
.RRGL 1
.RRGL
.RRGL
.RRGL 1
.l\WWlMl
.l\WWlMl
.l\WWlMl 1
b1
b2
b1
b2
bN bN
.RKLQD QW
.RUUHODDWWRUL
Mon
en k
äytt
äjän
ilm
aisu
Kuva 4.12 Monen käyttäjän ilmaisu[5]
61
MUD:in käytöstä on tiettyä etua solukkoradiojärjestelmissä. Seuraavassa tarkastellaanyhtälöiden muodossa MUD:in vaikutusta uplink-suunnassa. Merkitään MUD-hyöty-suhdetta symbolilla β. MUD on tarkoitettu uplink-käyttöön, mutta sitä suunnitellaankäytettäväksi myös downlink-suunnassa [43]. Tämä tosin lisää päätelaitteen komplek-sisuutta.
Kuormittamattomassa verkossa häiriötä aiheuttaa ainoastaan valkoinen kohina. Kuor-mitetussa verkossa oman sekä viereisten solujen päätelaitteet aiheuttavat häiriötä, jotensignaali-häiriö ja -kohinasuhde SINR määritellään [44]
SINRE
I I Nb
OMA MUU
=+ + 0
, (4.11)
jossa Eb on bittiä kohti vastaanotettu energiaIOMA on oman solun mobiilien aiheuttamat häiriötI MUU on viereisten solujen mobiilien aiheuttamat häiriötN 0 on valkoinen kohina.
Oman solun häiriön suhde kokonaishäiriöön F täytyy määritellä jokaiselle solulle erik-seen. Kuormitetussa verkossa F määritellään[45]
FI S
I S IOMA
OMA MUU
=+
+ +, (4.12)
jossa S E Gb b= / on yhden käyttäjän vastaanottama tehoGb on prosessointivahvistus.
Vaadittu E Nb / 0 määritellään kuormitetussa verkossa ilman MUD:ia kaavan (4.13)mukaisesti ja MUD:in kanssa kaavan (4.14) mukaisesti.
E
N E
N
N
F G
b
K b
EK b
0
0
1
1
1
=
−
− , (4.13)
E
N E
N
N
F G
b
K MUD b
EK b
0
0
1
1
1 1
=
−
− +
−, ( )β β
, (4.14)
joissa ( )E Nb K/ 0 on kuormitettu signaali-kohinasuhde
( )E Nb EK/ 0 on kuormittamaton signaali-kohinasuhde.
( )E Nb K MUD/
,0 on kuormitettu signaali-kohinasuhde MUD:in kanssa.
Käytännössä MUD-hyötysuhde riippuu kanavan estimointialgoritmista, häiriönpoisto-algoritmista, mobiilin nopeudesta jne. Kaavojen (4.13) ja (4.14) suhteesta voidaanpäätellä tarvittavan signaali-kohinasuhteen pienenevän käytettäessä MUD:ia. MUD
62
vähentää solun sisäisiä häiriöitä, joten se lisää spektrihyötysuhdetta ja lisää kuormitetunsolun peittoaluetta tai vastaavasti lisää kapasiteettia[45].
MUD:in ja RAKE-vastaanottimen yhteiskäyttöä on myös tutkittu [46]. CDMA-järjes-telmässä käytetyllä tavanomaisella RAKE-vastaanottimella on havaittu lähikauko-on-gelmia. Viitteessä [46] on yhdistetty tavanomainen RAKE-vastaanotin ja LMMSE-vas-taaanotin tämän asian korjaamiseksi. LMMSE-algoritmi (LMMSE = Linear MinimumMean Squared Error) kuuluu alioptimaalisiin monen käyttäjän ilmaisualgoritmeihin[5].Simulointitulosten mukaan tämä yhdistetty vastaanotin parantaa huomattavasti tavan-omaisen RAKE-vastaanottimen hyötysuhdetta erilaisissa kanavaolosuhteissa[46].
4.6 WCDMA:n ja SDMA:n yhteiskäyttö
TDMA/FDMA:n ja SDMA:n yhteiskäytössä käyttäjällä on rajoitettu määrä häiritsijöitä.Tällöin häiritsevien käyttäjien vaikutusta voidaan vähentää säätämällä nollakohta häi-ritsevän päätelaitteen suuntaan[47]. Yhtä kantoaaltoa käyttävässä CDMA:ssa kaikkikäyttäjät jakavat saman taajuuskaistan. Tällöin kaikki verkossa olevat käyttäjät vaikut-tavat häiriötasoon. Häiritsijöitä on tässä tapauksessa niin paljon, että nollansäätöä ei voi-da käyttää. Nollansäädön sijasta käytetään keilansäätöä, eli antennin keila suunnataankohti haluttua käyttäjää[48]. Tällöin muiden päätelaitteiden häiriö voidaan poistaa vainosittain. Keilansäätöön soveltuu adaptiivinen antenni, jonka keilansäätöalgoritmissa voi-daan käyttää hyödyksi eri käyttäjien ortogonaalisia koodeja[49].
CDMA-järjestelmässä käytetyt hajoituskoodit mahdollistavat edistyksellisten vastaan-ottimien käytön solukkoradiojärjestelmässä. Yhdistetty MUD/RAKE-tyyppinen vas-taanotin varustettuna adaptiivisella antennilla lisää kapasiteettia ja parantaa signaalinlaatua vähentämällä häiriöitä solukkoradiojärjestelmässä. Vastaavasti käytettyä vastaan-otinta voidaan ehkä yksinkertaistaa loytämällä parempi antenniratkaisu.
Signaalin vastaanottamiseen tarvitaan mahdollisimman optimaalinen antennirakenne.Toisin sanoen korrelaation antenniryhmän eri elementtien välillä tulee olla mahdolli-simman pieni. Etenemisympäristöjen vaikutuksen tuntemus on tärkeää antennivalintaatehtäessä. Erilaisten antennirakenteiden vertailuun eri etenemisympäristöissä on tarvettaedellisistä seikoista johtuen. Seuraavaksi käsitellään erästä mahdollista menetelmääantennirakenteiden vertailemiseen.
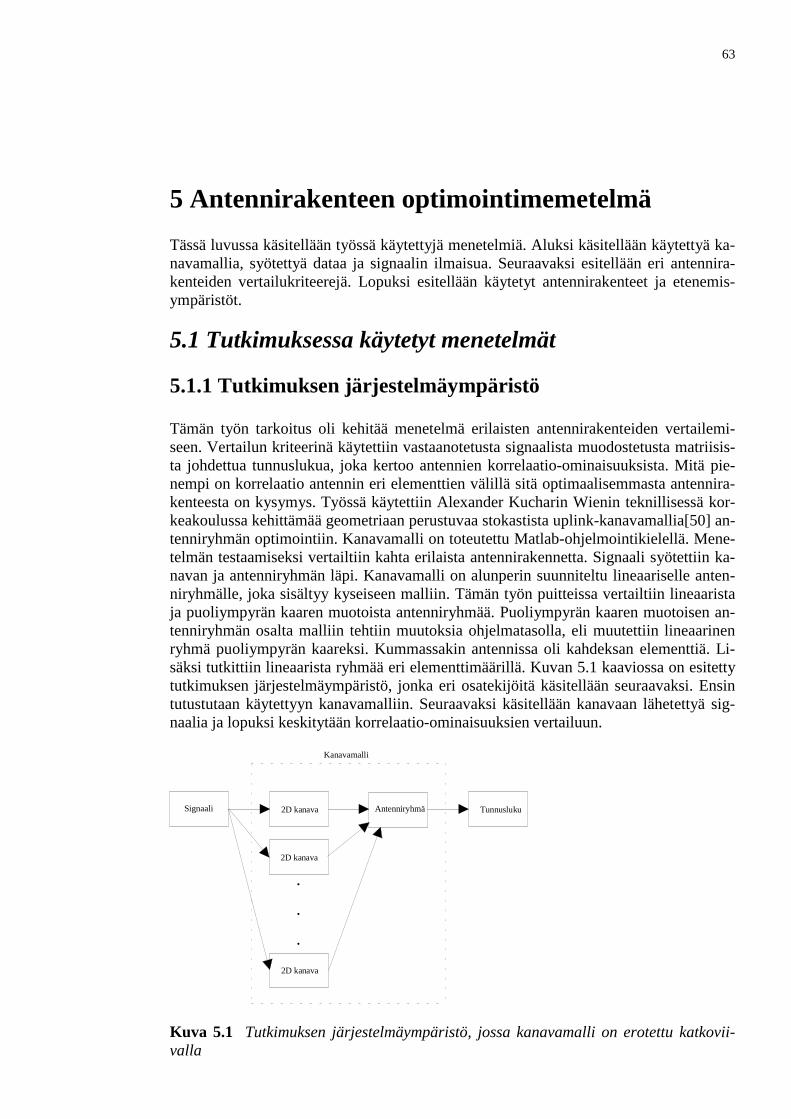
63
5 Antennirakenteen optimointimemetelmä
Tässä luvussa käsitellään työssä käytettyjä menetelmiä. Aluksi käsitellään käytettyä ka-navamallia, syötettyä dataa ja signaalin ilmaisua. Seuraavaksi esitellään eri antennira-kenteiden vertailukriteerejä. Lopuksi esitellään käytetyt antennirakenteet ja etenemis-ympäristöt.
5.1 Tutkimuksessa käytetyt menetelmät
5.1.1 Tutkimuksen järjestelmäympäristö
Tämän työn tarkoitus oli kehitää menetelmä erilaisten antennirakenteiden vertailemi-seen. Vertailun kriteerinä käytettiin vastaanotetusta signaalista muodostetusta matriisis-ta johdettua tunnuslukua, joka kertoo antennien korrelaatio-ominaisuuksista. Mitä pie-nempi on korrelaatio antennin eri elementtien välillä sitä optimaalisemmasta antennira-kenteesta on kysymys. Työssä käytettiin Alexander Kucharin Wienin teknillisessä kor-keakoulussa kehittämää geometriaan perustuvaa stokastista uplink-kanavamallia[50] an-tenniryhmän optimointiin. Kanavamalli on toteutettu Matlab-ohjelmointikielellä. Mene-telmän testaamiseksi vertailtiin kahta erilaista antennirakennetta. Signaali syötettiin ka-navan ja antenniryhmän läpi. Kanavamalli on alunperin suunniteltu lineaariselle anten-niryhmälle, joka sisältyy kyseiseen malliin. Tämän työn puitteissa vertailtiin lineaaristaja puoliympyrän kaaren muotoista antenniryhmää. Puoliympyrän kaaren muotoisen an-tenniryhmän osalta malliin tehtiin muutoksia ohjelmatasolla, eli muutettiin lineaarinenryhmä puoliympyrän kaareksi. Kummassakin antennissa oli kahdeksan elementtiä. Li-säksi tutkittiin lineaarista ryhmää eri elementtimäärillä. Kuvan 5.1 kaaviossa on esitettytutkimuksen järjestelmäympäristö, jonka eri osatekijöitä käsitellään seuraavaksi. Ensintutustutaan käytettyyn kanavamalliin. Seuraavaksi käsitellään kanavaan lähetettyä sig-naalia ja lopuksi keskitytään korrelaatio-ominaisuuksien vertailuun.
2D kanava Antenniryhmä Tunnusluku
2D kanava
2D kanava
• •
•
Kanavamalli
Signaali
Kuva 5.1 Tutkimuksen järjestelmäympäristö, jossa kanavamalli on erotettu katkovii-valla

64
Kanavamalli
Kanavamalli koostuu kolmesta eri funktiosta (chan_con, channel, sig_deci). Lisäksi sesisältää parameter-tiedoston, joka sisältää erilaisia alkuarvoja. Kanavamalli huomioi pe-rinteisistä malleista poiketen myös suuntatiedon AOA (AOA = Angle Of Arrival). Mallisisältää kahdenlaisia sirottajia. Paikalliset sirottajat (local scatterers) sijaitsevatpäätelaitteen ympärillä. Kaukosirottajat (far scatterers) sijaitsevat nimensä mukaisestikaukana päätelaitteesta. Simulaattori laskee kanavan vasteen eri käyttäjien lähettämillekompleksisille amplitudi- ja vaihetiedon sisältäville signaaleille. Yhden käyttäjän lähet-tämä signaali on hyötysignaali muiden käyttäjien lähettämien signaalien ollessa häiri-öitä.
Funktio channel laskee jokaiselle etenemistielle häviön, viiveen ja Dopplertaajuudenkäyttämällä funktion chan_con ulostuloparametreja. Funktion chan_con sisään- ja ulos-tuloparametrit on kuvattu liitteessä 1. Malli ottaa huomioon jokaiselta päätelaitteelta nä-köyhteyskomponentin LOS (LOS = Line Of Sight), paikallisista sirottajista sironneetsignaalit ja kaukosirottajista sironneet signaalit kuvan 5.2 mukaisesti. Kaikki signaali-komponentit vaimenevat kääntäen verrannollisena etäisyyden neliöön. LOS-kompo-nentissa ei esiinny erillistä häipymää. Eri sirottajille arvotaan satunnaiset kompleksisetheijastuskertoimet, joiden amplitudit vaihtelevat välillä 0-1 ja vaiheet välillä 0-2π.
Paikallisten sirottajien summasignaali normalisoidaan sirottajien määrän mukaan. Para-metrin K_rice avulla voidaan säätää LOS-komponentin ja paikallisten sirottajien tehojensuhdetta. Lisäksi paikallisille sirottajille on määritelty parametri diffraction_attn, jokahuomioi katon reunoista aiheutuvan diffraktiovaimennuksen. Kaukosirottajat muodos-tavat klusterin lähisirottajia kauemmaksi päätelaitteesta. Kaukosirottajista saapuvillakomponenteilla on keskimääräistä pienempi teho kuin paikallisilla sirottajilla/LOS-komponentilla. Kaukosirottajille ei ole määritelty parametria diffraction_attn.
Kuvan 5.2 esimerkissä on kolme paikallista sirottajaa ja kolme kaukosirottajaa. Eri mo-nitiekomponentit on kuvattu vastaanottojärjestyksessä LOS-komponentista (1) viimei-seen kaukosirottajasta saapuvaan komponenttiin (7). Kaukosirottajista sironneet kom-ponentit on kuvattu katkoviivoilla ja paikallisista sirottajista sironneet komponentit yh-tenäisillä viivoilla.
MS
BS
Kaukosirottajat
Paikalliset sirottajat
(1)
(2)
(3)
(4)
(5)
(6)
(7)
Kuva 5.2 Signaalin etenemistiet päätelaitteelta tukiasemalle

65
Mallissa signaalin verhokäyrä on Rayleigh-jakautunut näköyhteyden puuttuessa. Tällöintoinen etenemistie koostuu pelkästään paikallisista sirottajista. Näköyhteyden vallitessaeteneminen on Rice-jakautunutta, eli jakaumasta voidaan erottaa LOS-komponentti.
Päätelaitteet ovat tasaisesti jakautuneet kulma-alueessa parametrin doa_range mää-räämään sektoriin tukiasemalta katsottuna. Tosin kaksi eri päätelaitetta ei joudu samaanlinjaan ohjelman asettaman rajoituksen takia. Tukiasemansolun alueelle arvotutpäätelaitteiden paikat noudattavat todennäköisyystiheysjakaumaa pdf (pdf = probabilityden-sity function) etäisyyden funktiona:
pdf RR
R RMSMS
ms bs ms bs
( )max_ _ min_ _
=−
22 2 , (5.1)
missä RMS on tukiaseman ja päätelaitteen välinen etäisyysRmaax ms bs_ _ on solun säde
R ms bsmin_ _ tukiaseman ja päätelaitteen välinen minimietäisyys.
Päätelaitteiden nopeudet ja suunnat arvotaan myös satunnaisesti. Nopeudet vaihtelevatvälillä 0 − vmax ja suunnat välillä 0 2− π . Sirottajien ei oleteta mallissa liikkuvan, jottalaskentakuormitus ja edelleen laskenta-aika pysyisivät äärellisenä.
Tässä mallissa ei käytetä tasoaalto-oletusta. Sen sijaan jokainen antennielementtivastaanottaa kunkin sirottajan kautta satunnaisessa vaiheessa saapuvat signaalit kuvan5.2 mukaisesti. Tästä johtuen korrelaatio eri antennielementtien välillä riippuupääasiassa voimakkaimpien etenemissuuntien kulmahajeesta (LOS-komponentti japaikalliset sirottajat).
Kohinateho määritellään keskimääräisen vastaanotetun tehon mukaan. Keskimääräinenvastaanotettu teho ( Ptotal ) tukiasemalla koostuu yhdestä kolmeen korreloimattomastakomponentista kaavan 5.2 mukaisesti. Kaukosirottaja ( Pfar ) ja näköyhteyskomponentti
( )PLOS voivat myös puuttua riippuen parametrivalinnoista.
P P P Ptotal LOS local far= + + , (5.2)
jossa PLOS on näköyhteyskomponentin tehoPlocal on paikallisien sirottajien keskimääräinen tehoPfar on kaukosirottajien keskimääräinen teho.
Keskimääräisen tehon Ptotal avulla voidaan määrittää valkoisen Gaussisen kohinan kes-kihajontaσN kaavalla
σN total
SNR
P=12
10 10 , (5.3)
jossa SNR on keskimääräinen signaalikohinasuhde, joka määrätään sisäänmenopa-rametreissa. SNR määritellään yhdelle käyttäjälle ja yhdelle antennielementillesisäänmenosignaalin amplitudilla ykkönen. Kohinataso oletetaan vakioksi vaikka

66
sisäänme-nosignaalin amplitudiksi määriteltäisiin ykkösestä eroava arvo (monitilainenmodulaa-tiomenetelmä).
Mallissa on kaksi eri vaihtoehtoa tehonsäädön suhteen. Mallissa käytetään joko ideaa-lista tehonsäätöä (power_control = ‘ideal’) tai tehonsäätöä ei ole ollenkaan (power-_control = ‘no’). Ideaalisen tehonsäädön ollessa käytössä signaalikomponentit (LOS-komponentti, paikalliset sirottajat ja kaukosirottajat) normalisoidaan LOS-komponentinetenemishäviön mukaan. Etenemishäviö lasketaan kääntäen verrannollisena etäisyydenneliöön. Ongelmia aiheutuu LOS-komponentin puuttuessa, koska keskimääräinen ete-nemisvaimennus lasketaan tällöin monitiekomponenttien jakauman perusteella. Tästäaiheutuva virhe on kuitenkin pieni paikallisten sirottajien sijaitessa lähellä päätelaitetta.Kyseinen tehonsäätö ei ota huomioon Rayleigh-häipymää. Tämä vastaa nykyisin esi-merkiksi GSM-järjestelmässä käytössä olevaa hidasta tehonsäätöä. Jos tehonsäätö ei olekäytössä normalisoidaan signaaliteho solun säteen perusteella. Tämän johdosta LOS-komponentin signaaliteho solun rajalta saapuvilta päätelaitteilta normalisoidaan ykkö-seksi. Lähempänä olevilla päätelaitteilla se on ykköstä suurempi. Tämän johdosta spesi-fioitu SNR esiintyy vain päätelaitteiden ollessa solun rajalla. Muussa tapauksessa SNRon tätä suurempi.
Kohinatason määrittelemiseksi tulee tietää vastaanotetun signaalin keskimääräinentehotaso. Ideaalisen tehonsäädön ollessa kyseessä keskimääräinen tehotaso määritelläänseuraavasti. LOS-komponentin keskimääräinen signaaliteho normalisoidaan ykköseksivastaanotossa. Toisaalta monitiekomponenttien tehot ovat satunnaislukuja, koska neriippuvat eri komponenttien vaiheista. Sirontakomponenttien keskimääräiset tehotasotlasketaan Monte Carlo-simuloinnilla. Sirottajien jakauma solussa vaikuttaa keskimää-räiseen tehotasoon. Paikallisten sirottajien keskimääräinen teho riippuu sirottajaympy-rän säteestä. Kaukosirottajien keskimääräinen teho riippuu myös sirottajaympyrän sä-teestä ja lisäksi sekä päätelaitteiden että sirottajaympyröiden sijainnista solussa. Keski-määräiset tehot lasketaan aina uudestaan kanavan olosuhteiden muuttuessa merkittävästisolussa. Jos tehonsäätö ei ole käytössä SNR asetetaan jälleen solun säteen perusteella.Täten spesifioitu SNR on minimiarvo SNR:lle.
Mallissa voidaan käyttää kahta eri moodia häiriötä aiheuttavien käyttäjien sijainninsuhteen. SDMA-tilassa kaikki päätelaitteet sijaitsevat saman solun alueella ja SFIR-tilassa (SFIR = Spatial Filtering for Interference Reduction) yksi päätelaite sijaitsee so-lussa ja muut päätelaitteet sijaitsevat muissa saman kanavan soluissa. SDMA-tilassakäytetään lisäksi teholuokkia johtuen suuresta dynamiikasta solun alueella tehonsäädönollessa pois käytöstä. Teholuokat ovat samankeskisiä renkaita alueen
DRR
Rcell
ms bs
ms bs
= 20logmax_ _
min_ _
(5.4)
sisällä. Käyttäjät sijoitetaan ensimmäisen käyttäjän määräämään teholuokkaan (muutkäyttäjät häiriöitä). Jos esimerkiksi valitaan teholuokkien määräksi 5 ja dynaamiseksialueeksi 50 dB tulee jokaisen teholuokan dynaamiseksi alueeksi 10 dB.
Funktion channel sisäänmenoparametri burst määrittää erilaisten kanavavariaatioidenmäärän. Parametrin saadessa arvon 1 luodaan jokaisen kehyksen jälkeen uusikanavatilanne. Tätä moodia käytettäessä simuloidaan yksittäisiä itsenäisiä kehyksiä jakeskiarvoistetaan yli suuren määrän erilaisia kanavavaihtoehtoja. Yhden kehyksenaikana kanava sekä päätelaitteiden paikat pysyvät vakioina muuttuen seuraavassa

67
aikavälissä. Tästä huolimatta päätelaitteiden nopeudesta johtuva Dopplerhaje huomi-oidaan jokaisen kehyksen aikana. Parametrin burst saadessa suurempia arvoja kanavapysyy vakiona parametrin osoittaman kehyksien määrän ajan päätelaitteiden liikkuessavakionopeudella. Esimerkiksi parametrin arvolla 3 kanava pysyy muutumattomanakolmen kehyksen ajan. Burst-parametrin liian suurilla arvoilla päätelaitteet joutuvatpaikallisten sirottajaympyröiden ulkopuolelle. Haluttaessa täysin staattinen tilanneasetetaan sisäänmenoparametrille arvoksi burst >1 ja päätelaitteiden maksimino-peudeksi vmax = 0.
Mallissa määritellään monitiekomponenttien aiheuttama kulmahaje Sϕ seuraavasti:
SR
Rscatterer
ms bsϕ = max_
max_ _2, (5.5)
missä R scatterermax_ on joko lähi- tai kaukosirottajaympyrän tehollinen säde
R ms bsmax_ _ on maksimietäisyys tukiaseman ja päätelaitteen välillä.
Malli tarjoaa kolme erilaista mahdollisuutta sirottajaympyrän Rmax_scatterer määrittele-miseen. Ensimmäisessä menetelmässä valitaan vakioarvo sirottajaympyröiden säteille.Tästä johtuen kulmahaje kasvaa päätelaitteen lähestyessä tukiasemaa. Toisessa mene-telmässä valitaan sirottajaympyrän säde solun reunalta ja kulmahaje tämän perusteella.Samaa arvoa käytetään tämän jälkeen koko solun alueella. Kolmannessa menetelmässävalitaan kulmahaje vakioksi ja sirottajaympyrän säde adaptoituu kulmahajeen mukaansolun alueella.
Kanavaan lähetetty signaali
Kanavan sisäänmeno- ja ulostulodata määritellään funktion channel sisäänmeno- sekäulostuloparametreina. Kyseiset parametrit on esitetty taulukossa 5.1. Sisäänmenosignaa-lin amplitudi ja vaihe määritellään matriiseina, joissa eri rivit vastaavat eri päätelaitteitaja sarakkeet ajallisia signaalinäytteitä.
Taulukko 5.1 Sisäänmeno- ja ulostuloparametrit
SisäänmenoAmplitude kompleksisen kanavan sisäänmenosignaalin amplitudiPhase kompleksisen kanavan sisäänmenosignaalin vaiheBurst käytettävien aikavälien lukumääräSNR antennielementteihin saapuva keskimääräinen
signaalikohinasuhdeUlostuloX kompleksinen kanavavaste antennin ulostulossa
Tässä työssä muodostettiin korrelaatiomatriisi yhdestä symbolista jokaisessa kanavati-lassa, koska todettiin että useamman symbolin käyttö ei anna lisäinformaatiota kor-relaatio-ominaisuuksista. Kanavamalli asettaa rajoituksen signaalivektorin pituudelle,joten kanavaan jouduttiin lähetettämään symbolia pitempi purske. Tutkittiin yhdenpääte-laitteen lähettämää signaalia. Käytetty modulaatiomenetelmä oli QPSK (QPSK =Quadriphase-Shift Keying), jossa vaiheella on neljä eri tilaa ja kukin tila vastaa kahta eri

68
bittiä. QPSK-modulaattorin ulostulossa bittipareja -1-1, 1-1, vastaavat vaiheet 45º, 135º
amplitudin itseisarvon ollessa ykkönen. Kyseistä bittijonoa käytettiin tässä työssä.
Kasami-koodeista on olemassa erilaisia koodiperheitä kuten S-Kasami, L-Kasami jaVL-Kasami. Goldkoodeista on vastaavasti kaksi erilaista koodiperhettä[5]. Kasamikoo-deilla on paremmat ristikorrelaatio-ominaisuudet ja Goldkoodeilla vastaavasti paremmatautokorrelaatio-ominaisuudet. Tässä työssä käytettiin Kasamikoodeja, jotka soveltuvatparemmin monen käyttäjän ilmaisuun. Valinta tehtiin jatkotutkimusta ajatellen, vaikkayhden käyttäjän ilmaisussa eri monitiekomponenttien erottelemiseen toisistaan olisivatsoveltuneet paremmin Goldkoodit. Simulointiin valittiin 31 chipin pituinen L-Kasa-mikoodi. Koodisanan muodostamiseen käytettiin seuraavaa yhtälöä[51]
s j aqk q
qk( ) ( )= , ( , , , , , )a s j jq q∈ − ∈ − −11 1 1 , (5.6)
jossa k on käyttäjien lukumääräq on koodin pituusaq on koodisana
sq on kompleksinen koodisana.
QPSK-moduloitu datapaketti (-1-1, 1-1) hajoitettiin leveämmälle taajuuskaistalle käyt-täen edellä mainittua koodisanaa. Jokaista chippiä näytteistettiin 8 kertaa (oversamplinginput = 8). Näin ollen sisäänmenovektorin (amplitude, phase) pituudeksi tuli 64 chippiäeli 496 näytettä.
Kanavamallissa kanavan ulostulon kompleksinen kanavavaste x on matriisi jonka rivitvastaavat eri antennielementtejä ja sarakkeet ajallisia signaalinäytteitä. Eri monitie-komponentit summataan kompleksisesti yhteen. Sarakkeiden määrä ulostulomatriisissariippuu sisäänmenon signaalimatriisin sarakkeiden lukumäärästä eli ajallisista signaali-näytteistä sekä ulostulon näytteenottotaajuudesta.
Tässä työssä eri monitiekomponentteja ei summattu yhteen. Tässä työssä oltiin kiinnos-tuneita eri sirottajista saapuvista monitiekomponenteista sekä mahdollisesta suoraan tul-leesta komponentista. Nämä komponentit eroteltiin toisistaan ilmaisua varten. LOS-komponentista muodostui kanavavasteen x mukainen matriisi. Kaukosirottajista ja pai-kallisista sirottajista muodostui kolmiulotteiset matriisit, joissa lisädimensiona oli erietenemistiet. Ulostulosignaalia näytteistettiin 8 kertaa (oversampling_output = 8).
Varsinaisen kanavavasteen lisäksi malli antaa hyödyllisiä tietoja mobiilin suunnasta,kaukosirottajaklusterin suunnasta, signaalien tehotasoista ym. Liitteessä 3 on esitettyeräästä simuloinnista saatu lisäinformaatio.
Monen käyttäjän ilmaisin
Antennien vertailua lähestyttiin optimaalisen monen käyttäjän ilmaisualgoritmin (opti-mal multiuser demodulation) kautta[52]. Kyseisestä algoritmista on kehitetty moniele-menttinen versio antenniryhmille[53]. Laskentakapasiteetin tarve lisääntyy lineaarisestiantennielementtien määrän kasvaessa, koska jokainen antennielementti vastaa yhtä sum-malauseketta. Optimaalinen monisensorinen monen käyttäjän ilmaisualgoritmi voidaanesittää seuraavasti:

69
b b
b NK=
∈arg max ( )
ΞΩ , (5.7)
jossa
Ω( ) Reb b A S S A b A n b A S S A bHiH
iH
i i iH
iii
HiH
iH
i ii
= +
−
∑∑ ∑2 (5.8)
on todennäköisyysfunktio (log-likelihood function), jossa
b sisältää lähetetyt signaalit kullekin käyttäjälleSi sisältää käytetyt koodisanat kullekin käyttäjälleAi sisältää kanavan vasteen kullekin signaalille (eri käyttäjien eri
monitiekomponenteille)ni sisältää kohinani on elementti-indeksi.
Kaavan (5.8) hakasulkujen sisällä oleva lauseke on itsessään MUD-vastaanotin. Käyt-tämällä korjaustermiä, eli kaavan viimeistä summalauseketta, voidaan parantaa ilmaisunlaatua kohinaisessa kanavassa. Vastaanottimesta voidaan käyttää siis kahta eri versiota,kompleksisempaa käyttämällä korjaustermiä ja yksinkertaisempaa ilman korjaustermiä.Korjaustermi sisältää kanavan vasteen ja koodisanojen estimaatit. Kaavan toinen sum-malauseke sisältää kohinan vaikutuksen. Eri kohinavektoreiden oletetaan olevan riippu-mattomia toisistaan, eli ne ovat korreloimattomia. Tässä työssä tarkastellaan ainoastaanyhtä käyttäjää ja kohinaa ei oleteta esiintyvän.
5.1.2 Vertailukriteerit
Antennirakenteiden vertailu perustui vastaanotetusta signaalista muodostetun matriisintarkasteluun. Matriisista johdettiin tunnusluku, jonka perusteella vertailu tehtiin. Vas-taanottimeen saapuu signaali[54]
r t SAb b a s t mTk m k l m k k l ml
L
k
K
m
M
( ) ( ), , , , ,= = − −===∑∑∑ τ
110
(5.9)
jossa
M on datapaketin symbolien lukumääräK on käyttäjien lukumääräL on monitiekomponenttien lukumääräτ on viive.
Tässä yhtälössä ei esiinny kohinan vaikutusta. Kohinan puuttumisen takia kahden edelläesitetyn vastaanottimen vertailu ei ollut järkevää tässä työssä. Tämän voi perustella tar-kastelemalla todennäköisyysfunktion (5.8) kaavaa. Jos verrataan koko todennäköisyys-funktiosta muodostunutta matriisia todennäköisyysfunktion ensimmäisestä summalau-sekkeesta muodostuneeseen matriisiin, voidaan niiden havaita olevan melkein identtisetkohinattomassa tapauksessa. Ainoa ero on vertailtavien matriisien alkioiden imaginää-

70
riosien vastakkainen etumerkki. Tämän perusteella korjaustermin käytöllä ei saada mi-tään hyötyä kohinattomassa ympäristössä. Tästä johtuen on sama muodostaako matrii-sin koko todennäköisyysfunktiosta vai ainoastaan ensimmäisestä summalausekkeesta.Tilanne on toinen kohinan esiintyessä. Tässä tapauksessa korjaustermistä saadaan hyö-tyä ja tarkasteltavat matriisit eroavat toisistaan muutenkin kuin imaginääriosan etumer-kin perusteella. Kohinan puuttuminen ei kuitenkaan vaikuta tehtyyn antennivertailuun.
Matriisi ri voidaan esittää havainnollisemmin yhdelle antennielementille, yhdelle käyt-täjälle ja yhdelle symbolille kuvan 5.3 mukaisesti.
12
3
Lr =i
0
0
Kuva 5.3 Vastaanotettu signaali
Matriisin sarakkeina ovat vastaanotetut monitiekomponentit saapumisjärjestyksessä.Näköyhteyden esiintyessä ensimmäinen (1) komponentti on siis näköyhteyskomponent-ti. Tätä seuraavat ensimmäinen monitiekomponentti (2) ja niin edelleen.
Matriisi ri kerrotaan hermiitillään riH jokaiselle antennielementille erikseen, jolloin saa-
daan kaavassa (5.8) esiintyvä ensimmäisen summalausekkeen mukainen matriisi. Erielementeistä saadut matriisit summataan, jolloin saadaan summamatriisi. Tässä työssäkyseistä matriisia kutsutaan korrelaatiomatriisiksi MC.
M b A S S A b r rCH
iH
iH
i ii
iH
ii
= =∑ ∑ . (5.10)
Korrelaatiomatriisin diagonaalisuutta tutkimalla voidaan vertailla erilaisia antennira-kenteita. Mitä diagonaalisempi kyseinen matriisi on, eli mitä enemmän eri elementeistäilmaistujen osamatriisien diagonaalin ulkopuolella olevat alkiot kumoavat toisiaan, sitävähemmän antennielementtien välillä on korrelaatiota. Mitä vähemmän antenniele-menttien välillä on korrelaatiota sen optimaalisemmasta antennirakenteesta on kysymys.
Korrelaatiomatriisien diagonaalisuuden vertailemiseen käytettiin kahta eri menetelmää.Menetelmä 1 perustui matriisien ominaisarvoihin. Matriisin normi (pituus) määritel-lään[55]
M M MC CT
C= λmax ( ) . (5.11)
71
Matriisin normi lasketaan siis kertomalla matriisin transpoosi itsellään, valitsemallanäin muodostuneesta matriisista sen suurin ominaisarvo ja lopuksi ottamalla neliöjuuritästä ominaisarvosta.
Laskettiin matriisin normi korrelaatiomatriisille (MC). Tämän jälkeen asetettiin matriisindiagonaalilla olevat alkiot nolliksi ja laskettiin tämän modifioidun matriisin (MC
’) nor-mi. Näiden matriisien suhteesta saatiin tunnusluku α, eli
α =M
M
C
C
'
. (5.12)
Toinen menetelmä perustui matriisin käsittelemiseen vektorina, eli matriisin alkiot ko-rotettiin toiseen ja otettiin neliöjuuri lausekkeesta. Myös tässä menetelmässä laskettiinmodifioitu matriisi (MC
’) nollaamalla diagonaali. Laskettiin vastaavasti tunnusluku α.
Korrelaatiomatriisi on sitä diagonaalisempi mitä pienempi on laskettu tunnusluku. Nor-malisointi, eli jakaminen matriisilla MC, tehtiin koska signaalien tasot eivät ole yhtäsuuria päätelaitteen sijaitessa eri paikoissa tukiasemaa. Näin saatiin eri päätelaitteidenpaikat vertailukelpoisiksi. Jokaiselle kanavamallin arpomalle kanavatilalle/päätelaitteenpaikalle saatiin laskettua oma tunnuslukunsa αi jossa indeksi i tarkoittaa tässä tapauk-sessa eri kanavatilaa. Näiden tunnuslukujen keskiarvo
xN
ii
N
α
α= =
∑1 , (5.13)
kertoo kyseisen antennin korrelaatio-ominaisuuksista. Keskihajonta lasketaan kaavalla
( )σ
αα
α
=−
=∑ ii
n
x
N
2
1 . (5.14)
Keskihajonta kertoo kuinka homogeenisesti eri antennirakenteet toimivat eri etenemis-ympäristöissä. Keskiarvon keskivirhe lasketaan kaavalla
σσ
αα
x N= . (5.15)
Tämä puolestaan kertoo virherajat eri simulointituloksille, eli kuinka luotettavia saaduttulokset ovat.
5.2 Antennirakenteet
Ainoastaan lineaarinen antenniryhmä on integroitu käytettyyn kanavamalliin, koskamalli on kehitetty erilaisten kanavaolosuhteiden vertailemiseen. Työssä käytettiin line-aarista kahdeksan elementin ryhmää ja puoliympyrän muotoista kahdeksan elementinryhmää. Lisäksi tarkasteltiin lineaarista ryhmää eri elementtimäärillä. Puoliympyrän

72
muotoisen antenniryhmän takia mallia muutettiin, eli ohjelmoitiin uusi antennirakennekyseiseen malliin. Käytetyt antennirakenteet esitetään kuvassa 5.4. Lineaarisen ryhmänelementtien välinen etäisyys d oli /2, eli koko ryhmän leveys r1 oli 7d. Puoliympyränmuotoisella ryhmällä puoliympyrän piirin pituus oli 7d, joten antennin leveys r2 oli14d / π .
d = λ / 2
r d1 7= r d2 14= / π
Kuva 5.4 Käytetyt antennirakenteet
Tämän työn tarkoitus oli vertailumenetelmän kehittäminen erilaisille antenniryhmille.Sen vuoksi vertailussa käytettiin näitä yleisesti tunnettuja antennirakenteita.
Mallin antennielementit ovat pistemäisiä sensoreita, joten elementeillä ei ole vahvistus-ta. Tästä johtuen ne vastaanottavat signaalin samalla tavalla eri suunnista. Tämä ei vas-taa todellista tilannetta, koska tukiasema-antennin elementeillä on todellisuudessa vah-vistusta. Toisaalta tutkittaessa antennien elementtien välistä korrelaatiota ei vahvis-tusominaisuuksilla ole niin suurta merkitystä kuin antenniin saapuvien signaalien tulo-suunnalla.
Lineaarisella antenniryhmällä elementtien välillä voidaan ajatella olevan vähiten kor-relaatiota rintamasuuntaisella signaalilla. Jos tarkastellaan 180o sektoria, korrelaatiosuurenee säteilysuunnan siirtyessä päätyyn päin, eli :n arvon lähestyessä nollaa tai 180astetta kuvan 5.5 mukaisesti. Puoliympyrän muotoisella antenniryhmällä muutoksenvoidaan epäillä olevan pienempi. Tästä johtuen vastaanotto saattaa olla tasaisempaa. Tä-mä pätee todennäköisesti parhaiten signaalilla, jolla on yksi voimakas pääsäteilysuunta.Monitieeteneminen saattaa aiheuttaa yllätyksiä. Määrätyissä etenemisympäristöissä sig-naaleja voi saapua melko ympärisäteilevästi antenniin.
MS
BS BS
MS
Kuva 5.5 Korrelaatiovertailu saapumiskulman funktiona
5.3 Etenemiskanavat
Työssä luotiin kaksi erilaista etenemisympäristöä. Simuloinnit tehtiin makrosolu- jamikrosoluympäristössä liitteessä 2 esitetyillä parametriarvoilla. Tärkeimmät parametri-arvot on esitettynä taulukossa 5.2. Parametrien valinta oli vaikeaa riittävien vertailu-mittausten puuttumisen takia.

73
Taulukko 5.2 Simuloinneissa käytetyt tärkeimmät parametrivalinnat makrosolulle jamikrosolulle tiedostoista parameters1 ja parameters2
Parametri Makrosolu Mikrosoluf_uplink 1950e6 1950e6f_duplex 190e6 190e6T_symbol 0,244e-6 0,244e-6frame_duration 10e-3 10e-3LOS 1 0Rmin_ms_bs 50 5Rmax_ms_bs 1500 500K_rice 1 1num_localsc 20 20Rmax_localsc 300 4num_farsc 20 0Rmax_farsc 50 0percentage_farsc 1 0
Osalla kanavamallissa määritellyistä parametreista ei ollut merkitystä mallin käytönluonteesta johtuen. Sisäänmenoparametrin burst arvolla 1 päätelaite ei liiku simuloinninaikana. Tällöin päätelaitteen nopeuden määrittely ei ole tarpeellista. Solun muiden pää-telaitteiden häiriöiden määrittelemiseen tarkoitettua parametria (channel interferencemode = ‘SDMA’/’SFIR’) ei tarvittu, koska simuloitiin ainoastaan yhtä päätelaitetta.Tehonsäätö (power control = ‘ideal’/’no’) menetti merkityksensä, koska eri etenemis-teiltä saapuvat monitiekomponentit summataan yhteen ennen tehonsäätöä. Tässä työssäoltiin kiinnostuneita eri monitiekomponenteista, joten niiden erotteleminen toisistaanohitti tehonsäädön. Tehonsäädön puuttuminen korvattiin korrelaatiomatriisin normali-soinnilla kaavan (5.12) mukaisesti. Tällä tavalla saatiin eri kohtiin solua arvottujenpäätelaitteiden keskimääräiset tehot samoiksi.
Jokaiselle antennille/etenemisympäristölle arvottiin yhteensä 1000 erilaista kanavatilaa.Näistä simuloinneista saatiin yhteensä 4000 kanavatilaa. Lineaarista antennia eri ele-menttimäärillä tutkittaessa käytettiin mikrosolusimuloinnista saatua dataa. Parametrindoa_range arvoksi asetettiin 90°, joten malli arpoo päätelaitteen 180° sektorin alueelletukiasemalta katsottuna.
5.3.1 Makrosolu
Ensin mallinnettiin kaupunki/esikaupunkialueella sijaitsevaa makrosolua. Solun säteeksivalittiin 1,5 km, joka vastaa lähinnä esikaupunkiympäristössä sijaitsevan makrosolunkokoa. Tässä simuloinnissa signaalilla esiintyi LOS-komponentti ja paikallisistasirottajista/kaukosirottajista sironneet komponentit. LOS-komponentti olisi yhtä hyvinvoinut puuttua tässä tapauksessa. Paikallisten sirottajien ja kaukosirottajien määräksivalittiin 20. Kuvassa 5.6 esitetään erään makrosolusimuloinnin antama kanavatilanne,jossa paikalliset sirottajat on kuvattu ympyröillä ja kaukosirottajat risteillä. Tukiasemasijaitsee ympyrän keskikohdassa ja mobiili löytyy paikallisten sirottajien keskeltä, elitässä tapauksessa 20° kulmasta tukiasemaan nähden.

74
Channel c onfiguration for burs t 1.
531.7968
1063.5935
1595.3903
30
210
60
240
90
270
120
300
150
330
180 0
Kuva 5.6 Esimerkki kanavatilanteesta makrosolun simuloinnissa kaupunki/esikaupun-kiympäristössä taulukon 5.2 parametriarvoilla
5.3.2 Mikrosolu
Toisessa tapauksessa mallinnettiin kaupunki/esikaupunkialueella sijaitsevaa mikrosolua.Solun säteeksi valittiin 0,5 km, joka vastaa lähinnä esikaupunkiympäristössä sijaitsevanmikrosolun kokoa. Tässä simuloinnissa signaalilla ei esiintynyt LOS-komponenttia eikäkaukosirottajista saapuvia komponentteja. Paikallisten sirottajien määräksi valittiin 20.Kuvassa 5.7 esitetään eräs mikrosolusimuloinnin kanavatilanne.
C hanne l c onfigu rat ion fo r bu rs t 1 .
507 .1684
1014 .3368
1521 .5051
30
210
60
240
90
270
120
300
150
330
180 0
Kuva 5.7 Esimerkki kanavatilanteesta mikrosolun simuloinnissa kaupunki/esikaupun-kiympäristössä taulukon 5.2 parametriarvoilla

75
6 Tutkimustulokset
6.1 Optimointimenetelmän testaus
Simulointien toteuttamiseksi laadittiin muutama lyhyt Matlab-ohjelma. Simulointienkulku oli seuraavanlainen. Kanavaan syötettiin edellisessä luvussa esitettysignaalivektori yhdestä päätelaitteesta (num_ms = 1). Kanavamallista saatiin ulostulonatiedosto, jossa ovat makrosolun tapauksessa matriisit näköyhteyskomponentille ja lähi-sirottajista sekä kaukosirottajista saapuville monitiekomponenteille. Mikrosolun tapa-uksessa näköyhteyskomponentti ja kaukosirottajista saapuvat komponentit puuttuivat.
Kuva 6.1 Lineaarisen ryhmän erään kanavatilan korrelaatiomatriisi MC makrosolussayhdelle symbolille
Monitiekomponenteista laskettiin korrelaatiomatriisi (MC) ja modifioitu korrelaatio-matriisi (MC
’) jokaiselle antennille/kanavatilalle. Korrelaatiomatriisi laskettiin jokai-sessa kanavatilassa ainoastaan yhdelle symbolille. Erään kanavatilan korrelaatiomatriision esitetty kuvassa 6.1. Kuvan korrelaatiomatriisi laskettiin kahdeksanelementtiselle li-neaariselle ryhmälle makrosolussa. Matriisi on symmetrinen johtuen kaavan 5.10 mu-kaisesta hermitointioperaatiosta. Matriisin alkiot ovat keskittyneet vasempaan yläkul-maan (koordinaattiakselien mukaan) johtuen eri monitiekomponenttien viiveistä. Täysinkorreloimattomassa tapauksessa matriisin diagonaalin ulkopuolella ei esiintyisi alkioita.Korrelaatiomatriisien avulla laskettiin vertailussa käytetyt tunnusluvut () kahdella erimenetelmällä, jotka on esitetty luvussa 5. Menetelmä 1 perustuu ominaisarvoihin ja me-netelmä 2 matriisien rivien/sarakkeiden käsittelemiseen vektoreina. Tunnusluku () onsitä pienempi mitä vähemmän antennielementit korreloivat toistensa kanssa. Lopuksilaskettiin tilastollisessa vertailussa tarvittavat keskiarvot, keskihajonnat ja keskiarvonkeskivirheet.
Edellisen luvun taulukossa 5.2 esitetään tärkeimmät parametrivalinnat eri etenemis-ym-päristöille. Loput tiedostojen parameters1 ja parameters2 parametreista löytyvät liit-teestä 2. Taulukossa 6.2 on käytetty lyhenteitä:

76
mali: makrosolu, lineaarinen antennimaym: makrosolu, ympyrän kaaren muotoinen antennimili: mikrosolu, lineaarinen antennimiym: mikrosolu, ympyrän kaaren muotoinen antenni
6.2 Lineaarisen antennin tutkiminen
Antenniryhmien vertailussa tehtiin simulointi kahdelle eri antennille kahdessa eri ete-nemisympäristössä. Yhteensä tehtiin siis 4 simulointia. Jokaisessa simuloinnissa ar-vottiin 1000 eri kanavatilaa jokaiselle antennille/etenemisympäristölle ja saatiin 1000tunnuslukua (). Arvottiin siis yhteensä 4000 kanavatilaa. Laskettiin 1000 simuloinnintunnusluvuille keskiarvot, keskihajonnat ja keskiarvojen keskivirheet eri antenneil-le/etenemisympäristöille. Ensimmäiset arvot ( xα1 ,σα1 ,σ αx 1
) laskettiin menetelmällä 1 ja
toiset arvot ( xα 2 ,σα 2 ,σ αx 2 ) laskettiin menetelmällä 2.
Ensin tarkasteltiin menetelmän luotettavuutta laskemalla tunnuslukujen keskiarvo ( xα )
lineaariselle antennille mikrosolussa elementtimäärillä 1-8. Elementit lisättiin ryhmäänjärjestyksessä yhdestä kahdeksaan. Korrelaatiomatriisin määrittelystä johtuen yhdelleelementille laskettu tunnusluku kertoo monitiekomponenttien viiveistä. Jos eri moni-tiekomponentit saapuvat vähintään symbolin verran viivästyneinä toisiinsa nähden saatunnusluku arvon nolla, koska MC
’ on tällöin nolla. Suurimmillaan tunnusluku on mo-nitiekomponenttien saapuessa samanaikaisesti antennielementtiin. Tällöin matriisin MC
’
koko on mahdollisimman suuri.
Taulukossa 6.1 ovat kummallakin menetelmällä lasketut arvot eri elementtimäärille.Tuloksista piirrettiin pylväsdiagrammi menetelmän 1 mukaan lasketuille arvoille. Diag-rammi löytyy kuvasta 6.2. Taulukosta ja diagrammista voidaan tehdä muutamia huo-mioita. Havaitaan tunnusluvun pienenevän elementtimäärän kasvaessa, joten tunnuslu-vun käyttäytyminen on järkevää tämän perusteella. Jos tarkastellaan eri elementtimää-rillä saatuja tunnuslukuja ja vastaavia keskiarvon keskivirheitä voidaan havaita keskiar-von keskivirheen olevan samaa suuruusluokkaa kuin tunnuslukujen erotuksen eri ele-menttien välillä. Tästä voidaan päätellä simuloinnissa käytetyn kanavatilojen määränolevan liian pieni.
Taulukko 6.1 Tunnuslukujen () keskiarvot ( xα ), keskihajonnat (σα ) ja keskiarvojen
keskivirheet (σ αx ) laskettuna menetelmillä 1 ja 2 eri elementtimäärillä mikrosolussa
α 1 elem. 2. elem 3. elem 4. elem 5. elem 6. elem 7. elem 8. elemxα1 0,9135 0,9129 0,9122 0,9114 0,9107 0,9101 0,9096 0,9091
σα1 0,0325 0,0329 0,0332 0,0337 0,0342 0,0345 0,0349 0,0352σ αx 1 0,0010 0,0010 0,0010 0,0011 0,0011 0,0011 0,0011 0,0011xα 2 0,9498 0,9491 0,9485 0,9478 0,9471 0,9466 0,9462 0,9458σα 2 0,0211 0,0219 0,0222 0,0225 0,0230 0,0234 0,0238 0,0242σ αx 2 0,0007 0,0007 0,0007 0,0007 0,0007 0,0007 0,0008 0,0008

77
Tunnusluku alpha elementtimää rän funktiona
Elementtimää rä
Alp
ha
1 2 3 4 5 6 7 80.9
0.902
0.904
0.906
0.908
0.91
0.912
0.914
0.916
0.918
0.92
Kuva 6.2 Tunnusluku () elementtimäärän (1-8) funktiona mikrosolussa lineaarisellaantennilla
6.3 Antenniryhmien vertailu
Seuraavaksi vertailtiin kahta eri antennirakennetta eri etenemisympäristöissä. Tuloksetlöytyvät taulukosta 6.2. Tarkastelemalla taulukon 6.2 arvoja ei voida havaita eri anten-nien tunnusluvuissa olevan merkittävää eroa makrosolun tapauksessa. Puoliympyränkaaren muotoinen ryhmä näyttäisi olevan hieman huonompi kuin lineaarinen ryhmä täs-sä vertailussa, mutta tarkasteltaessa keskiarvon keskivirhettä huomataan eron kuitenkinolevan melko pieni. Lisäksi keskihajonta on hieman pienempi, josta voidaan päätelläpuoliympyrän kaaren muotoisen ryhmän vastaanottavan hieman tasaisemmin. Mik-rosolussa antennien väliset erot ovat vielä pienempiä kuin makrosolussa. Antennien tun-nuslukujen välillä ei siis ole merkittävää eroa.
Taulukko 6.2 Tunnuslukujen () keskiarvot ( xα ), keskihajonnat (σα ) ja keskiarvojen
keskivirheet (σ αx ) laskettuna menetelmillä 1 ja 2 eri antenneilla eri etenemisympäris-
töissä
α mali maym mili miymxα1 0,8754 0,8791 0,9091 0,9096
σα1 0,1356 0,1220 0,0352 0,0293σ αx 1 0,0043 0,0039 0,0011 0,0009xα 2 0,9181 0,9222 0,9458 0,9460σα 2 0,1359 0,1201 0,0242 0,0211σx 2 0,0043 0,0038 0,0008 0,0007

78
Seuraavaksi tarkasteltiin tunnuslukujen () käyttäytymistä simulointien määränfunktiona 10 simuloinnin välein. Kuvassa 6.3 on esitetty käyrät kahdelle tarkasteltavalleantennirakenteelle makrosolussa menetelmällä 1. Havaitaan, että simulointien määrä eiole riittävä, koska käyrät eivät ole stabiloituneet. Tästä johtuen makrosolusimuloinnistaei voida vetää lopullisia johtopäätöksiä tämän simulointimäärän perusteella. Kuvassa6.4 esitetään tunnuslukujen keskiarvojen keskivirheet lineaariselle ryhmälle ja kuvassa6.5 ympyrän kaaren muotoiselle ryhmälle.
Kuvassa 6.6 on esitetty käyrät kahdelle eri antennille mikrosolussa menetelmällä 1.Mikrosolun tapauksessa havaitaan stabiloitumisen olevan paljon nopeampaa kuin mak-rosolun tapauksessa. Käyrät stabiloituvat noin 400 simuloinnin jälkeen. Kuvassa 6.7esitetään tunnuslukujen keskiarvojen keskivirheet lineaariselle ryhmälle ja kuvassa 6.8ympyrän kaaren muotoiselle ryhmälle mikrosolun tapauksessa.
Stabiloitumisen nopeus näyttäisi olevan verrannollinen solun kokoon. Mitä suurempi onsolun koko sitä enemmän on vaihtelua eri monitiekomponenttien saapumisajoissa. Täl-löin myös tunnuslukujen arvot vaihtelevat enemmän eri kanavatiloissa.
0 100 200 300 400 500 600 700 800 900 10000.85
0.86
0.87
0.88
0.89
0.9
0.91
0.92Tunnusluku alpha simulointien mää rän funktiona
Simulointien mää rä
Alp
ha
Lineaarinen ryhmäPuoliympyrän muotoinen ryhmä
Kuva 6.3 Tunnusluku () simulointien määrän funktiona makrosolussa kummallakinantennilla

79
0 100 200 300 400 500 600 700 800 900 10000.85
0.86
0.87
0.88
0.89
0.9
0.91
0.92Tunnusluku alpha ( lin ant )
Simulointien mää rä
Alp
ha
KeskiarvoKeskiarvo maxKeskiarvo min
Kuva 6.4 Tunnuslukujen () keskiarvo ( xα1 ) ja keskiarvon keskivirhe (σ αx 1) lineaari-
sella antennilla simulointien funktiona makrosolussa
0 100 200 300 400 500 600 700 800 900 10000.85
0.86
0.87
0.88
0.89
0.9
0.91
0.92Tunnusluku alpha ( puoliymp ant )
Simulointien mää rä
Alp
ha
KeskiarvoKeskiarvo maxKeskiarvo min
Kuva 6.5. Tunnuslukujen () keskiarvo ( xα1 ) ja keskiarvon keskivirhe (σ αx 1) puoliym-
pyrän kaaren muotoisella antennilla simulointien funktiona makrosolussa

80
0 100 200 300 400 500 600 700 800 900 10000.85
0.86
0.87
0.88
0.89
0.9
0.91
0.92Tunnusluku alpha simulointien mää rän funktiona
Simulointien mää rä
Alp
ha
Lineaarinen ryhmäPuoliympyrän muotoinen ryhmä
Kuva 6.6 Tunnusluku () simulointien määrän funktiona mikrosolussa
0 100 200 300 400 500 600 700 800 900 10000.85
0.86
0.87
0.88
0.89
0.9
0.91
0.92Tunnusluku alpha ( lin ant )
Simulointien mää rä
Alp
ha
KeskiarvoKeskiarvo maxKeskiarvo min
Kuva 6.7 Tunnuslukujen () keskiarvo ( xα1 ) ja keskiarvon keskivirhe (σ αx 1) lineaari-
sella antennilla simulointien funktiona mikrosolussa

81
0 100 200 300 400 500 600 700 800 900 10000.85
0.86
0.87
0.88
0.89
0.9
0.91
0.92Tunnusluku alpha ( puoliymp ant )
Simulointien mää rä
Alp
ha
KeskiarvoKeskiarvo maxKeskiarvo min
Kuva 6.8 Tunnuslukujen () keskiarvo ( xα1 ) ja keskiarvon keskivirhe (σ αx 1) puoliympy-
rän kaaren muotoisella antennilla simulointien funktiona mikrosolussa
Vertailtaessa eri etenemisympäristöistä saatuja tunnuslukuja keskenään, voidaan havaitamakrosolun tapauksessa tunnuslukujen olevan pienempiä kuin mikrosolun tapauksessa.Tunnusluku on siis riippuvainen käytetystä etenemisympäristöstä. Tämä johtuu eri mo-nitiekomponenttien viiveiden kasvusta solun koon funktiona.
Simulointien keston havaittiin olevan verrannollinen monitiekomponenttien määrään jakanavatilojen määrään mikä oli oletettua. Tässä työssä makrosolusimuloinnit kestivätnoin 4 tuntia (1000 kanavatilaa, 41 monitiekomponenttia) ja mikrosolusimuloinnit noin2 tuntia (1000 kanavatilaa, 20 monitiekomponenttia). Simuloinnit kestivät yhteensä 12tuntia.
Lopuksi vertailtiin tunnusluvun laskemisessa käytettyä kahta eri menetelmää. Kaikkiedeltävät kuvaajat on laskettu ominaisarvomenetelmällä (menetelmä 1). Piirrettiinkuvaajat makrosolun/lineaarisen (mali) antennin tapauksessa samaan kuvaan kummal-lakin menetelmällä. Ominaisarvomenetelmä antaa pienempiä arvoja tunnusluvulle kunmatriisin sarakkeiden/rivien pituuksiin perustuva menetelmä (menetelmä 2). Kuvasta6.9 voidaan havaita kahdella eri menetelmällä laskettujen kuvaajien korreloivan hyvin,joten ei ole merkitystä kumpaa menetelmää käytetään antennien vertailussa.

82
0 100 200 300 400 500 600 700 800 900 10000.65
0.7
0.75
0.8
0.85
0.9
0.95
1Menetelmien vertailu
Simulointien mää rä
Alp
ha
Menetelmä 1Menetelmä 2
Kuva 6.9 Kahden eri laskentamenetelmän vertailu (menetelmä 1, menetelmä 2)
6.4 Tulosten pohdinta
Eri elementtimäärillä lineaariselle antennille tehdyn vertailun perusteella voidaan pää-tellä työssä käytetyn menetelmän soveltuvan erilaisten antennirakenteiden vertailuun.Lineaarisen antennin havaittiin makrosolussa toimivan hieman paremmin ja vastaavastiympyrän kaaren muotoisen antennin hieman tasaisemmin. Tarkasteltaessa keskiarvonkeskivirheen ja antennien tunnuslukujen välistä eroa voidaan todeta eri kanavatilojenmäärän olevan kuitenkin liian pieni makrosolun tapauksessa. Tarkasteltaessa kuvaa 6.3havaitaan että makrosolussa olisi tarvittu huomattavasti suurempi määrä eri kanavatilojastabiloitumisen takaamiseksi solun koon ollessa kolminkertainen mikrosoluun verrat-tuna. Tällöin ei voida tehdä lopullisia johtopäätöksiä antennien eroista mikrosoluntapauksessa.
Mikrosolussa tunnuslukujen välinen ero eri antenneilla oli vielä pienempi kuin mak-rosolussa. Mikrosolun tapauksessa tulos näytti stabiloituneen noin 400 eri kanavatilanjälkeen. Kanavatilojen kasvattaminen olisi todennäköisesti osoittanut tunnuslukujen ole-van aivan sama eri antenneilla.
Havaittiin solun koon vaikuttavan stabiloitumisnopeuteen ja edelleen tarvittaviin simu-lointiaikoihin. Näiden simulointien perusteella on vaikea sanoa kuinka paljon solunkoon kasvattaminen vaikuttaa tarvittavien kanavatilojen määrään. Eräs keino simulointi-aikojen lyhentämiseksi on samojen kanavatilojen käyttäminen vertailtaville antenneille.Samoilla kanavatiloilla voidaan tällöin vertailla useampia antenneja.
Eri etenemisympäristöissä saadut tunnusluvut ovat vertailukelvottomia keskenään joh-tuen tunnusluvun määrittelystä. Tunnusluku on sitä pienempi mitä suurempia ovat vii-
83
veet eri monitiekomponenttien välillä. Tästä huolimatta eri antenneja voidaan vertaillasamassa etenemisympäristössä.
Työstä käytetystä kahdesta eri menetelmästä (menetelmä 1 ja menetelmä 2) saadaantäysin korreloivia tuloksia. Tunnuslukujen suuruudessa oleva ero johtuu ainoastaan ma-temaattisesta määrittelystä ja se ei vaikuta antennien vertailuun.
84
7 Johtopäätökset
Työssä kehitettiin menetelmää antenniryhmien optimointiin. Luvussa kolme esitettyjäsynteesimenetelmiä ei käytetty, koska ne on kehitetty antenniryhmille. Tarkoitus oli sensijaan kehittää yleinen optimointimenetelmä antennijoukoille. Vertailun kriteerinä käy-tettiin vstaanotetusta signaalista muodostetusta korrelaatiomatriisista johdettua tunnus-lukua. Erilaisten kanavatilojen luomiseksi käytettiin Wienin teknillisessä korkeakoulus-sa kehitettyä suuntamallia. Malli perustuu luvussa kaksi esitettyyn teoriaan suunta-malleista.
Työssä johdetut tunnusluvut antavat informaatiota antenniryhmän korrelaatio-ominai-suuksista eri etenemisympäristöissä. Tästä johtuen saadaan informaatiota eri antennira-kenteiden toiminnasta. Tunnusluku on sitä pienempi mitä suurempia ovat eri monitie-komponenttien viiveet. Tästä johtuen kehitettyä menetelmää voidaan käyttää antennira-kenteiden vertailemiseen määrätyssä etenemisympäristössä, mutta eri etenemisympäris-töjen tulokset ovat vertailukelvottomia keskenään.
Jatkossa on tarkoitus tutkia kohinan vaikutusta kahteen luvussa 5 esiteltyyn vastaan-otinratkaisuun. Tarkoitus on siis tutkia, voiko kompleksisemman vastaanottimen kor-vata yksinkertaisemmalla käyttämällä optimaalisempaa antennirakennetta. Tässä työssäkehitettiin ainoastaan antennien vertailuun soveltuvaa menetelmää. Jatkossa voidaankäyttää samaa tunnuslukua kuin tässäkin työssä.
Tämän tutkimuksen perusteella voidaan päätellä lineaarisen ryhmän ja ympyrän kaarenmuotoisen ryhmän toimivan melkein samalla tavalla eri etenemisympäristöissä. Lisäksihavaittiin elementtimäärän lisäämisen parantavan antennin ominaisuuksia. Tämä olioletettua ja tarkastelu tehtiinkin ainoastaan käytetyn menetelmän testaamiseksi.
Suuntamallissa antennielementit on oletettu pistemäisiksi säteilylähteiksi, joka on todel-lisuudesta poikkeava ominaisuus. Isotrooppisesti vastaanottavien antennielementtienvaikutusta simulointien lopputulokseen ei voida arvioida tämän työn perusteella. Tule-vaisuudessa tämä asia tulee ottaa huomioon.
Tässä työssä käytetyssä kanavamallissa lineaarinen antenniryhmä on integroitu itsemalliin ja antennirakenteen muuttaminen oli tästä johtuen hieman hankalaa. Sisäänra-kennetun antennirakenteen takia samoja kanavatiloja ei voitu käyttää kummallekinantennirakenteelle. Tämä seikka pidentää simulointiaikoja huomattavasti.
Jatkossa on tarkoitus kehittää erillinen ohjelma, jossa antennirakenne erotetaan kana-vamallista. Tällöin pystytään muuttamaan antenniryhmän elementtien määriä ja paik-koja helpommin. Samaa dataa käyttäen voidaan silloin vertailla eri antennimahdolli-suuksia. Tätä ohjelmaa on tarkoitus edelleen kehittää synteesityökaluksi, jossa pystytäänmuuttamaan antenniryhmän jotain ominaisuutta, simuloimaan riittävä määrä kanavati-loja ja seuraamaan mitä kyseinen muutos vaikuttaa. Kyseiseen synteesiohjelmaan voi-daan syöttää myös mitattua dataa. Näin voidaan vertailla simuloinneilla ja mittauksillasaatuja tuloksia.

85
Lähdeluettelo
[1] H. Holma, F. Ovesjö, E. Dahlman, M. Latva-aho, A. Toskala, “Physical layer ofFRAMES Mode 2 - wideband CDMA”, Proceedings of the 1998 IEEE 48th Ve-hicular Technology Conference, 18–21 toukokuuta 1998, Ottawa, Kanada, ss.978–982.
[2] I. Lindell: Radioaaltojen eteneminen, Helsinki, Suomi, Hakapaino Oy, 1996,261 s.
[3] T. S. Rappaport: Wireless Communications, 1th ed. New Jersey, USA, PrenticeHall PTR, 1996, 641 s.
[4] G. J. R. Povey, P. M. Grant, R. D. Pringle, “A decision-directed spread-spectrum RAKE receiver for fast-fading mobile channels”, IEEE Transactionson Vehicular Technology, Vol. 45, No. 3, elokuu 1996, ss. 491–502.
[5] T. Ojanperä, R. Prasad: Wideband CDMA for Third Generation Mobile Commu-nications, Lontoo, Englanti, Artech House, 1998, 439 s.
[6] G. L. Turin, “Introduction to spread-spectrum antimultipath techniques and theirapplication to urban digital radio“, Proceedings of the IEEE, Vol. 68, maaliskuu1980, ss. 328–353.
[7] S. A. Abbas, A. U. Sheikh, “On understanding the nature of slow fading in LOSmicrocellular channels”, Proceedings of the 1997 IEEE 47th Vehicular Technolo-gy Conference, 4–7 toukokuuta 1997, Ottawa, Kanada, ss. 662–666.
[8] D. Boudreau, “Equalization on fast flat-fading channels based on signal-to-inter-ference ratio optimization”, IEEE International Conference on Communications,23–27 kesäkuuta 1996, Ottawa, Kanada, ss. 1193–1197.
[9] J. D. Parsons: The Mobile Radio Propagation Channel, Lontoo, Englanti, Pen-tech Press, 1992, 314 s.
[10] A. F. Molish, J. Laurila, A. Kuchar, R. Schmalenberger, “Test scenarios for mo-bile radio systems with adaptive antennas”, First COST 252/259 JointWorkshop, 21–22 huhtikuuta 1998, Bradford, Englanti, ss. 162–170.
[11] J. Fuhl, A. F. Molisch, E. Bonek, “Unified channel model for mobile radio sys-tems with smart antennas”, IEEE Proceedings-Radar, Sonar, Navigation, Vol.145, No. 1, helmikuu 1998, ss. 32–41.
[12] A. F. Molisch, J. Laurila, A. Kuchar, “Geometry-based stochastic model for mo-bile radio channels with directional component”, International Antenna Sympo-sium, 9–10 heinäkuuta 1998, Surrey, Englanti, 5 s.
[13] K. Fujimoto, J.R. James: Mobile Antenna Systems Handbook, Lontoo, Englanti,Artech House, 1994, 617 s.

86
[14] K. Kalliola, “Testbed for adaptive array antennas” , Diplomityö, Sähkö- ja tie-toliikennetekniikan osasto, Teknillinen korkeakoulu, Suomi, helmikuu 1997, 87s.
[15] A. Lehto, A. Räisänen: RF- ja Mikroaaltotekniikka, Helsinki, Suomi, HakapainoOy,1994, 250 s.
[16] J. Ollikainen, P. Vainikainen, ”Radiation and bandwidth characteristics of twoplanar multistrip antennas for mobile communication systems”, Proceedings ofthe 1998 IEEE 48th Vehicular Technology Conference, 18–21 toukokuuta 1998,Ottawa, Kanada, ss. 1186–1190.
[17] I. Lindell, K. Nikoskinen: Antenniteoria, Helsinki, Suomi, Hakapaino Oy,1995, ss. 101–162.
[18] H. Steyskall, J. S. Herd “Mutual coupling compensation in small array anten-nas”, IEEE Transactions on Antennas and Propagation, Vol. 38, No. 12, joulu-kuu 1990, ss. 1971–1975.
[19] T. T. Taylor, “Design of line source antennas for narrow beamwidth and lowside lobes”, IEEE Transactions on Antennas and Propagation, huhtikuu 1955,ss. 16–28.
[20] H. J. Orchard, R. S. Elliott, “Optimizing the Synthesis of shaped beam antennapatterns”, IEE Proceedings, Vol. 132, No.1, helmikuu 1985, ss. 63–68.
[21] W. C. Y. Lee,"Antenna spacing requirements for a mobile radio base station di-versity", Bell Laboratory Technical Journal, Vol. 50, No. 6, heinä-elokuu 1971.
[22] A. D. M. Turkmani, A. A. Arowojoly, P. A. Jefford, C. J. Kellett, "An experi-mental evaluation of the performance of two-branch space and polarisation di-versity scheme at 1800 MHz", IEEE Transactions on Vehicular Technology,Vol. 44, No. 2, toukokuu 1995, ss. 318-326.
[23] J. Laiho-Steffens, “ Two-dimensional characterisation of the mobile propaga-tion environment”, Lisensiaatin työ, Sähkötekniikan osasto, Teknillinen korkea-koulu, Suomi, kesäkuu 1996, 94 s.
[24] P. E. Mogensen, J. Wigard, “On antenna- and frequency diversity in GSM rela-ted systems (GSM-900, DCS-1800, and PCS1900)”, IEEE International Sympo-sium on Personal, Indoor and Mobile Radio Communications, 15–18 lokakuuta1996, Taiwan, ss. 1272–1276.
[25] J. J. A. Lempiäinen, K. I. Nikoskinen, J. O. Juntunen, “Multistate phasediversity microcell antenna”, Electronics Letters, Vol. 33, No. 6, maaliskuu1997, ss. 438–440.
[26] S. C. Lin, V. K. Prabhu, “Optimum diversity combining with finite-tap decisionfeedback equalization in digital cellular mobile radio”, IEEE International Con-ference on Communications, 8–12 kesäkuuta 1997, Montreal, Kanada, ss. 629–635.

87
[27] E. Perahia, G. J. Pottie, “On diversity combining for correlated slowly flat-fa-ding Rayleigh channels”, IEEE International Conference of Communications,1–5 toukokuuta 1994, New Orleans, USA, ss. 342–346.
[28] The ETSI UMTS Terrestrial Radio Access (UTRA) ITU-R RTT Candidate Sub-mission, ETSI SMG2, Tdoc SMG2 260/98, 157s.
[29] J. Litva, T. K. Y. Lo: Digital Beamforming in Wireless Communications, 1st ed.Lontoo, Englanti, Artech House, 1996, 301 s.
[30] D. Gerlach, A. Paulraj, “Adaptive transmitting antenna arrays with feedback”,IEEE Signal Processing Letters, Vol. 1, lokakuu 1994, ss. 150–152.
[31] G. Xu, H. Liu, “An effective transmission beamforming scheme for frequency-division-duplex digital wireless communication systems”, International Confe-rence on Acoustics, Speech, and Signal Processing, 9–12 toukokuuta 1995,Detroit, USA, ss. 1729–1732.
[32] R. C. Bernhardt, “ The use of multiple-beam directional antenna in wireless messaging systems”, Proceedings of the 1994 IEEE 45th Vehicular Technology Con-ference, 25–28 kesäkuuta 1995, Chicago, USA, ss. 858–861.
[33] G. A. Halls, “HIPERLAN: the high performance radio local area network stan-dard”, Electronics & Communication Engineering Journal, Vol. 6, No. 6, joulu-kuu 1994, ss. 289–296.
[34] P. Aikio “ Radiokanavaluotaimen kehittäminen “, Diplomityö, Sähkö- ja tietolii-kennetekniikan osasto, Teknillinen korkeakoulu, Espoo, helmikuu 1996, 62 s.
[35] W. C. Y. Lee, “Overview of cellular CDMA”,IEEE Transactions on VehicularTechnology, Vol. 40, No. 2, toukokuu 1991, ss. 291–302.
[36] A. M. Earnshav, S. D. Blostein, “Efficient evaluation of adaptive digital beam-forming for multi-service provision in a cellular CDMA system”, Proceedings ofthe 1998 IEEE 48th Vehicular Technology Conference, 18–21 toukokuuta 1998,Ottawa, Kanada, ss.1665–1668.
[37] M. Gustafsson, K. Jamal, E. Dahlman, “Compressed mode techniques for inter-frequency measurements in a wideband DS-CDMA system”, Proceedings ofthe1997 IEEE 8th International Symposium on Personal, Indoor and MobileRadio Communications, 1–4 syyskuuta 1997, Helsinki, Suomi, ss. 231–235.
[38] W. C. Y. Lee: Mobile Cellular Telecommunications Systems, McGraw-Hill,New York, USA, 1989, 449 s.
[39] V. C. Y. Lee,”Applying the intelligent cell concept to PCS”, IEEE TransactionsVehicular Technology, Vol. 43, No. 3, elokuu 1994, ss. 672679.
[40] Y-F. Chen, M. D. Zoltowski, “Convergence analysis and tracking ability of re-duced dimension blind space-time RAKE receivers for DS-CDMA”, Procee-

88
dings of the 1998 IEEE 48th Vehicular Technology Conference, 18–21 touko-kuuta 1998, Ottawa, Kanada, ss. 2333–2337.
[41] S. Das, J. R. Cavallaro, B. Aazhang, “Computationally efficient multiuser detec-tors” , Proceedings of the 1997 IEEE 8th International Symposium on Personal,Indoor and Mobile Radio Communications, 1–4 syyskuuta 1997, Helsinki,Suomi, ss. 62–67.
[42] S. Verdu, “Adaptive multiuser detection”, IEEE 3th International Symposium onSpread Spectrum Techniques and Applications Proceedings, Vol 1, 4–6heinäkuuta 1994, Oulu, Suomi, ss. 43–50.
[43] F. Ovesjö, E. Dahlman, T. Ojanperä, A. Toskala, A. Klein, “FRAMES multipleaccess mode 2 wideband CDMA”, Proceedings of the 1997 IEEE 8th Internatio-nal Symposium on Personal, Indoor and Mobile Radio Communications, 1–4syyskuuta 1997, Helsinki, Suomi, ss. 42–46.
[44] W. C. Jakes: Microwave Mobile Communications, New York, USA, 1994, 642s.
[45] H. Holma, A. Toskala, T. Ojanperä, “Cellular coverage analysis of widebandMUD-CDMA system” , Proceedings of the 1997 IEEE 8th International Sympo-sium on Personal, Indoor and Mobile Radio Communications, 1–4 syyskuuta1997, Helsinki, Suomi, ss. 549–553.
[46] M. Latva-Aho, M. Juntti, I. Oppermann, “Reconfigurable adaptive RAKEReceiver for wideband CDMA systems”, Proceedings of the 1998 IEEE 48th
Vehicular Technology Conference, 18–21 toukokuuta 1998, Ottawa, Kanada, ss.1740–1744.
[47] E. Buracchini, F. Muratore, V. Palestini M. Sinibaldi, “Performance analysis ofa mobile system based on combined SDMA/CDMA access technique”, IEEE 4th
International Sumposium on Spread Spectrum Techniques an ApplicationsProceedings, 22–25 syyskuuta 1996, Mainz, Saksa, ss. 370–374.
[48] A. F. Naquib, A. Paulraj, T. Kailath, “Capacity improvement with base-stationantenna arrays in cellular CDMA”, IEEE Transactions on Vehicular Techno-logy, Vol. 43, Issue 3, elokuu 1994, ss. 691–698.
[49] B. D. Van Veen, K. M. Buckley, “Beamforming: A versatile approach to spatialfiltering”, IEEE ASSP Magazine, huhtikuu 1988, ss. 4–24.
[50] A. Kuchar, “Uplink channel model for adaptive antennas”, Internal TechnicalReport # ITR970916KC, Wien, Itävalta, maaliskuu 1998, 11 s.
[51] O-A. Lehtinen, “Development of the RF section of the mobile station for theTDD option of UMTS”, Diplomityö, Sähkö- ja tietoliikennetekniikan osasto,Teknillinen korkeakoulu, Suomi, tammikuu 1999, 170 s.
[52] M. Juntti, “Multiuser Demodulation for DS-CDMA System in Fading Chan-nels”, Väitöskirja, Oulu, Suomi, Oulu University Press, 1997, 155 s.
89
[53] M. J. Juntti, J. O. Lilleberg, “ Comparative analysis of conventional and multi-user detectors in multisensor receivers”, Proceedings of Integrating Military andCommercial Communications for the next century, 2–5 marraskuuta 1997, USA,Monterey, ss. 318–323.
[54] W. Haifeng, J. Lilleberg, “Partial optimization of the multistage multiuser detec-tor with a sliding window in asynchronous CDMA systems”, 1999 Finnish Sig-nal Processing Symposium, 31 toukokuuta 1999, Oulu, Suomi, ss. 6–9.
[55] G. Strang: Introduction to Linear Algebra, Wellesley, Englanti, Wellesley Cam-bridge Press, 1993, 472 s.
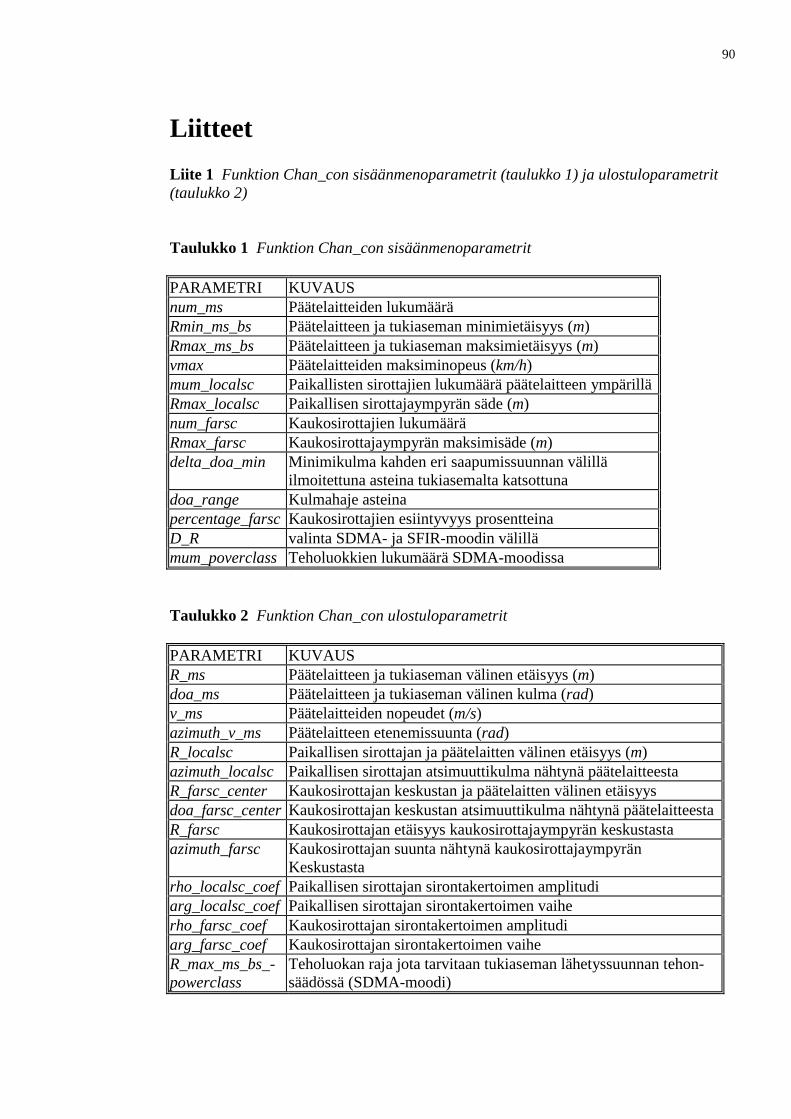
90
Liitteet
Liite 1 Funktion Chan_con sisäänmenoparametrit (taulukko 1) ja ulostuloparametrit(taulukko 2)
Taulukko 1 Funktion Chan_con sisäänmenoparametrit
PARAMETRI KUVAUSnum_ms Päätelaitteiden lukumääräRmin_ms_bs Päätelaitteen ja tukiaseman minimietäisyys (m)Rmax_ms_bs Päätelaitteen ja tukiaseman maksimietäisyys (m)vmax Päätelaitteiden maksiminopeus (km/h)mum_localsc Paikallisten sirottajien lukumäärä päätelaitteen ympärilläRmax_localsc Paikallisen sirottajaympyrän säde (m)num_farsc Kaukosirottajien lukumääräRmax_farsc Kaukosirottajaympyrän maksimisäde (m)delta_doa_min Minimikulma kahden eri saapumissuunnan välillä
ilmoitettuna asteina tukiasemalta katsottunadoa_range Kulmahaje asteinapercentage_farsc Kaukosirottajien esiintyvyys prosentteinaD_R valinta SDMA- ja SFIR-moodin välillämum_poverclass Teholuokkien lukumäärä SDMA-moodissa
Taulukko 2 Funktion Chan_con ulostuloparametrit
PARAMETRI KUVAUSR_ms Päätelaitteen ja tukiaseman välinen etäisyys (m)doa_ms Päätelaitteen ja tukiaseman välinen kulma (rad)v_ms Päätelaitteiden nopeudet (m/s)azimuth_v_ms Päätelaitteen etenemissuunta (rad)R_localsc Paikallisen sirottajan ja päätelaitten välinen etäisyys (m)azimuth_localsc Paikallisen sirottajan atsimuuttikulma nähtynä päätelaitteestaR_farsc_center Kaukosirottajan keskustan ja päätelaitten välinen etäisyysdoa_farsc_center Kaukosirottajan keskustan atsimuuttikulma nähtynä päätelaitteestaR_farsc Kaukosirottajan etäisyys kaukosirottajaympyrän keskustastaazimuth_farsc Kaukosirottajan suunta nähtynä kaukosirottajaympyrän
Keskustastarho_localsc_coef Paikallisen sirottajan sirontakertoimen amplitudiarg_localsc_coef Paikallisen sirottajan sirontakertoimen vaiherho_farsc_coef Kaukosirottajan sirontakertoimen amplitudiarg_farsc_coef Kaukosirottajan sirontakertoimen vaiheR_max_ms_bs_-powerclass
Teholuokan raja jota tarvitaan tukiaseman lähetyssuunnan tehon-säädössä (SDMA-moodi)

91
Liite 2 Makrosolu- ja mikrosolusimuloinnissa käytetyt paramertiarvot(parameters1,parameters2)
Taulukko 1 Selitys parametiarvoille poiketen liitteen 1 parametriarvoista
PARAMETRI KUVAUSf_uplink päätelaitteen lähetyssuunnan taajuusf_duplex päätelaitteen lähetyssuunnan ja tukiaseman lähetys-
suunnan ja tukiaseman lähetyssuunnan taajuuseroT_symbol symbolin pituusframe_duration kehyksen pituusoversampling_input sisäänmenosignaalin näytteiden määräoversampling_output ulostulosignaalin näytteiden määrächannel_interference_mode käytetty häiriömoodi (‘SDMA’,’SFIR’)channel_SDMA_num_powerclass SDMA-moodin teholuokkien lukumäärächannel_interference_distance saman kanavan solujen välinen etäisyys suhteessa
solun säteeseenangular_spread KulmahajeLOS näköyhteyskomponentin esiintyvyysK_rice näköyhteyskomponentin keskimääräisen tehon suh-
de paikallisten sirottajien keskimääräiseen tehoondiffraction_attn diffraktio johtuen katonharjoistapower_control tehonsäätö (‘ideal’,’no’)

92
Taulukko 2 Käytetyt parametriarvot makrosolulle (parameters 1) ja mikrosolulle(parameters 2)
PARAMETRI MAKROSOLU MIKROSOLUVmax 200 80num_ms 1 1D_R 0 0num_powerclass 1 1f_uplink 1950e6 1950e6f_duplex 190e6 190e6T_symbol 0,244e-6 0,244e-6frame_duration 10e-3 10e-3oversampling_input 8 8oversampling_output 8 8channel_interference_mode ‘SDMA’ ‘SDMA’channel_SDMA_num_powerclasss 1 1channel_interference_distance 1,7321 1,7321angular_spread ‘arbitrary’ ‘arbitrary’doa_range 90 90delta_doa_min 0 0LOS 1 0Rmin_ms_bs 50 5Rmax_ms_bs 1500 500K_rice 1 1diffraction_attn 20 20num_localsc 20 20Rmax_localsc 300 4num_farsc 20 0Rmax_farsc 50 0percentage_farsc 1 0power_control ‘ideal’ ‘ideal’

93
Liite 3 Kanavamallin antama data eräästä kanavatilasta
================= Additional channel parameters =======================
Current velocities in km/h: 152.4194-----------------------------------------------------------------------All power values in dB and averaged over all array elements.Signal power of LOS component: -0.001671Signal power of local scatterers: 12.5574Signal power of far scatterers: -11.858- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -Signal power of user 1: 11.4032- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -Signal power of sum signal: 11.4032Noise power: -18.4527Current SNR: 29.8559- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -Total (S & N) power of sum signal [center element]: 11.4089 [11.4434]- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -Average mean delay in us: 0.22964Average rms delay spread in us: 0.60175Instantaneous mean delay in us: 0.96349Instantaneous rms delay spread in us: 0.29437Maximum relative (to LOS component) path delay in us: 6.3333Delay of LOS component in us: 3.489Maximum path delay in us: 9.8224DOAs of mobiles: -48.3951DOAs of far scatterer: 19.2317