StephaneG - Group4
5
Cellular Automaton – Neighborhood Types Definition : A cellular automaton (CA) is a discrete model studied in computability theory, mathematics, physics, Complexity Science, theoretical biology and microstructure modeling. It consists of a regular grid of cells, each in one of a finite number of states, such as "On" and "Off". The grid can be in any finite number of dimensions. For each cell, a set of cells called its neighborhood (usually including the cell itself) is defined relative to the specified cell. 1-D neighborhood Radial neighborhood (Wolfram) Brickwall neighborhood Usually the neighborhood in 1D is described by An unaligned neighborhood, usually the smallest possible k = 2. Usually the neighborhood in 1D is described by it's radius r, meaning the number of cell left and right from the central cell that are used for the neighborhood. The output cell is positioned at the center. An unaligned neighborhood, usually the smallest possible k = 2. The output cell is positioned at k 0 = 0.5 between the two cells of the neighborhood. It is usually processed by alternatively shifting the output cell between k 0 = 0 and k 0 = 1. GreenLab Studio – Stuttgart 2X – ESA Paris S5 Stéphane GIROLD
-
Upload
girold-stephane -
Category
Documents
-
view
222 -
download
0
description
Presentation of research about cellular automaton
Transcript of StephaneG - Group4
-
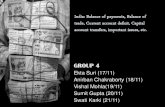
Cellular Automaton Neighborhood Types
Definition :A cellular automaton (CA) is a discrete model studied in computability theory, mathematics, physics, Complexity Science, theoretical biology and microstructure modeling. It consists of a regular grid of cells, each in one of a finite number of states, such as "On" and "Off". The grid can be in any finite number of dimensions. For each cell, a set of cells called its neighborhood (usually including the cell itself) is defined relative to the specified cell. For each cell, a set of cells called its neighborhood (usually including the cell itself) is defined relative to the specified cell.
1-D neighborhood
Radial neighborhood (Wolfram) Brickwall neighborhood
Usually the neighborhood in 1D is described by An unaligned neighborhood, usually the smallest possible k = 2. Usually the neighborhood in 1D is described by it's radius r, meaning the number of cell left and right from the central cell that are used for the neighborhood. The output cell is positioned at the center.
An unaligned neighborhood, usually the smallest possible k = 2. The output cell is positioned at k0 = 0.5 between the two cells of the neighborhood. It is usually processed by alternatively shifting the output cell between k0 = 0 and k0 = 1.
GreenLab Studio Stuttgart 2X ESA Paris S5 Stphane GIROLD
-
Cellular Automaton Neighborhood Types
2-D neighborhoodVon Neumann neighborhood Moore neighborhood
It is the smallest symmetric 2D aligned neighborhood usually described by directions on the compass N = {N,W,C,E,S} sometimes the central cell is omitted
It is a simple square (usually 33 cells) with the output cell in the center. Usually cells in the neighborhood are described by directions on the compass N = {NW,N,NE,W,C,E,SW,S,SE} sometimes the central cell is omitted.sometimes the central cell is omitted.
Hexagonal neighborhood The Star of David neighborhood
This is the simplest, plainest and probably the most obvious hexagonal neighborhood imaginable.Previously this neighborhood has been known as the "Uniform" neighborhood
The Star of David neighbourhood is a isometric neighbourhood often used by those implementing two-dimensional lattice gasses.The automata divides the plane into tesselating hexagons"Uniform" neighborhood The automata divides the plane into tesselating hexagons
GreenLab Studio Stuttgart 2X ESA Paris S5 Stphane GIROLD
-
Cellular Automaton Neighborhood Types
3-D neighborhood3D Von Neumann neighborhood Moore neighborhood
This is one of the simpler and more commonly-used cubic neighbourhoods.
This is the neighbourhood most commonly used by 3D versions of Conway's game of life.
Isometric Gold neighbourhood
This is one of the moist basic and fundamental neighbourhoods used in lattice gas simulations.It is based on a pattern of close-packed spheres, using the face-centre-cubic packing.face-centre-cubic packing.Each cell (which consists of a rhombic dodecahedron) is divided into twelve rhombus-based pyramids.
GreenLab Studio Stuttgart 2X ESA Paris S5 Stphane GIROLD
-
Cellular Automaton Movable CA
:The Movable cellular automaton (MCA) method is a method in computational solid mechanics based on the discrete concept. Important advantage of the method is a possibility of direct simulation of materials fracture including damage generation, crack propagation, fragmentation and mass mixing.propagation, fragmentation and mass mixing.
The new concept of the MCA method is based on the introducing of the state of the pair of automata (relation of interacting pairs of automata) in addition to the conventional one the state of a separate automaton. As a result of this, the automata have the ability to change their neighbors by switching the states (relationships) of the pairs.
The introducing of new type of states leads to new parameter to use it as criteria for switching relationships. It is defined as an automaton overlapping parameters hij. So the relationship of the cellular automata is characterised by the value of their overlapping.automaton overlapping parameters hij. So the relationship of the cellular automata is characterised by the value of their overlapping.
In contrast to the classical cellular automaton method in the MCA method not only a single automaton but also a relationship of pair of automata can be switched. According with the bistable automata concept there are two types of the pair states (relationships)
linked both automata belong to a solidunlinked each automaton of the pair belongs to different bodies or parts of damaged body.
GreenLab Studio Stuttgart 2X ESA Paris S5 Stphane GIROLD
-
Cellular Automaton CA Applied
Urban Developpment
In the case of urban modelisation, the cell space on which a cellular automaton operates might be considered equivalent in an urban sense to an environment, a landscape, or a territory. The standard resolutions is 500500 m2 up to 2525 m2. Its the grid of the city.environment, a landscape, or a territory. The standard resolutions is 500500 m2 up to 2525 m2. Its the grid of the city.
Neighborhood : the traditional implementations of the concept are bases on Von Neumann or Moore neighborhoods.The main relationship between 2 automatons :Attraction (urban/ecological)Attraction (urban/ecological)Repulsion (urban/industrial)
Neighborhood effect defined as a measure of the interaction between land uses at two locations that decreases linearly until zero with the distance Neighborhood effect defined as a measure of the interaction between land uses at two locations that decreases linearly until zero with the distance between them. Normalized measure are :
1 if there is total attraction; 0 if there is no relationship; -1 if there is total repulsion
Final real Land Use Map
-1 if there is total repulsion
Example of simulation Initial Land Use MapInitial Land Use Map
Final simulated Land Use Map
GreenLab Studio Stuttgart 2X ESA Paris S5 Stphane GIROLD
CellularAutomaton1.pdf