Simulation of line fault locator on HVDC Light electrode line344138/FULLTEXT01.pdf · BACHELOR’S...
39
BACHELOR’S THESIS Electrical Engineering, Electric Power Technology Department of Engineering Science August 10, 2010 Simulation of line fault locator on HVDC Light electrode line Andreas Hermansson
-
Upload
phungnguyet -
Category
Documents
-
view
230 -
download
2
Transcript of Simulation of line fault locator on HVDC Light electrode line344138/FULLTEXT01.pdf · BACHELOR’S...
BACHELOR’S THESIS Electrical Engineering, Electric Power Technology Department of Engineering Science
August 10, 2010
Simulation of line fault locator on HVDC Light electrode line Andreas Hermansson

BACHELOR’S THESIS
i
Simulation of line fault locator on HVDC Light elec trode line
Summary
In this bachelor thesis, cable fault locators are studied for use on the overhead electrode
lines in the HVDC (High Voltage Direct Current) Light project Caprivi Link.
The cable fault locators studied operates with the principle of travelling waves, where a
pulse is sent in the tested conductor. The time difference is measured from the injection
moment to the reflection is received. If the propagation speed of the pulse is known the
distance to the fault can be calculated. This type of unit is typically referred to as a TDR
(Time Domain Reflectometer). The study is performed as a computer simulation where a
simplified model of a TDR unit is created and applied to an electrode line model by using
PSCAD/EMTDC. Staged faults of open circuit and ground fault types are placed at three
distances on the electrode line model, different parameters of the TDR units such as pulse
width and pulse amplitude along with its connection to the electrode line are then studied
and evaluated.
The results of the simulations show that it is possible to detect faults of both open circuit
and ground fault types with a suitable TDR unit. Ground faults with high resistance
occurring at long distances can be hard to detect due to low reflection amplitudes from the
injections. This problem can somewhat be resolved with a function that lets the user
compare an old trace of a “healthy” line with the new trace. The study shows that most of
the faults can be detected and a distance to the fault can be calculated within an accuracy of
± 250 m.
The pulse width of the TDR needs to be at least 10 µs, preferable 20 µs to deliver high
enough energy to the fault to create a detectable reflection. The pulse amplitude seams to
be of less significance in this simulation, although higher pulse amplitude is likely to be
more suitable in a real measurement due to the higher energy delivered to the fault. The
Hipotronics TDR 1150 is a unit that fulfil these requirements and should therefore be able
to work as a line fault locator on the electrode line.
Date: August 10, 2010 Author : Andreas Hermansson Examiner : Lars Holmblad Advisor : Sören Nyberg, ABB AB Programme : Electrical Engineering, Electric Power Technology Main field of study : Electrical Engineering Education level : Bachelor Credits : 15 HE credits Keywords Line fault locator, TDR, Arc reflection, simulation, electrode line, HVDC Publisher : University West, Department of Engineering Science,
S-461 86 Trollhättan, SWEDEN Phone: + 46 520 22 30 00 Fax: + 46 520 22 32 99 Web: www.hv.se

Simulation of line fault locator on HVDC Light electrode line
ii
Preface
I would like to thank Anna-Karin Skytt and Sören Nyberg at ABB AB who made this
bachelor’s thesis possible.
Andreas Hermansson
Ludvika 9 April 2010

Simulation of line fault locator on HVDC Light electrode line
iii
Contents Summary .............................................................................................................................................. i Preface ................................................................................................................................................ ii Abbreviations ................................................................................................................................... iv 1 Introduction ................................................................................................................................ 1
1.1 Background ....................................................................................................................... 1 1.2 Project description ........................................................................................................... 2 1.3 Methodology ..................................................................................................................... 2
2 Theory .......................................................................................................................................... 4 2.1 Travelling waves ............................................................................................................... 4 2.2 Description of the time domain reflectometer (TDR) ............................................... 6 2.3 Description of the impulse thumper ............................................................................. 6 2.4 Description of the arc reflection method ..................................................................... 7
3 Design .......................................................................................................................................... 8 3.1 Modelling of electrode line ............................................................................................. 8 3.2 Modelling of line fault locator ...................................................................................... 10
3.2.1 Time domain reflectometer ............................................................................ 10 3.2.2 Arc reflection .................................................................................................... 11
3.3 Fault model ..................................................................................................................... 12 4 Simulations ................................................................................................................................ 13
4.1 Fault type ......................................................................................................................... 13 4.1.1 Low resistance to ground ................................................................................ 14 4.1.2 High resistance to ground ............................................................................... 15 4.1.3 Open circuit ...................................................................................................... 16
4.2 Pulse width ...................................................................................................................... 17 4.3 Pulse amplitude .............................................................................................................. 18 4.4 Connection ...................................................................................................................... 19 4.5 Parallel/single line .......................................................................................................... 21 4.6 Electrode station configuration ................................................................................... 22 4.7 Arc reflection .................................................................................................................. 24
5 Results and analysis .................................................................................................................. 26 5.1 Fault type ......................................................................................................................... 26
5.1.1 Low resistance ground fault ............................................................................ 26 5.1.2 High resistance ground fault ........................................................................... 27 5.1.3 Open circuit ...................................................................................................... 28
5.2 Pulse width ...................................................................................................................... 28 5.3 Pulse amplitude .............................................................................................................. 29 5.4 Connection ...................................................................................................................... 29 5.5 Parallel/single line .......................................................................................................... 30 5.6 Electrode station configuration ................................................................................... 31 5.7 Arc reflection .................................................................................................................. 31
6 Conclusions and future work ................................................................................................. 33 References ........................................................................................................................................ 34

Simulation of line fault locator on HVDC Light electrode line
iv
Abbreviations
HVDC High Voltage Direct Current
IGBT Insulated Gate Bipolar Transistor
LFL Line Fault Locator
TDR Time Domain Reflectometer
Simulation of line fault locator on HVDC Light electrode line
1
1 Introduction
1.1 Background
Caprivi Link is a HVDC Light project that will be delivered to Namibia during 2010.
HVDC Light is a power transmission system developed by ABB that is based on voltages
source converters using IGBT semiconductors and high frequency pulse width modulation
to convert from AC to DC and back again. The Light version is available in the range from
50 to 1200 MW [1].
The project consists of converter stations, in Zambezi and Gerus, connected by two
overhead lines approximately 970 km long. The link has a power rating of 300 MW
operating at a DC voltage of 350 kV. This is the first HVDC Light project to be built with
overhead lines. At a first stage one monopole is delivered but there is an option to expand
to a bipole. This transmission link is very important for the power supply of the country as
the networks in the region are very weak [2].
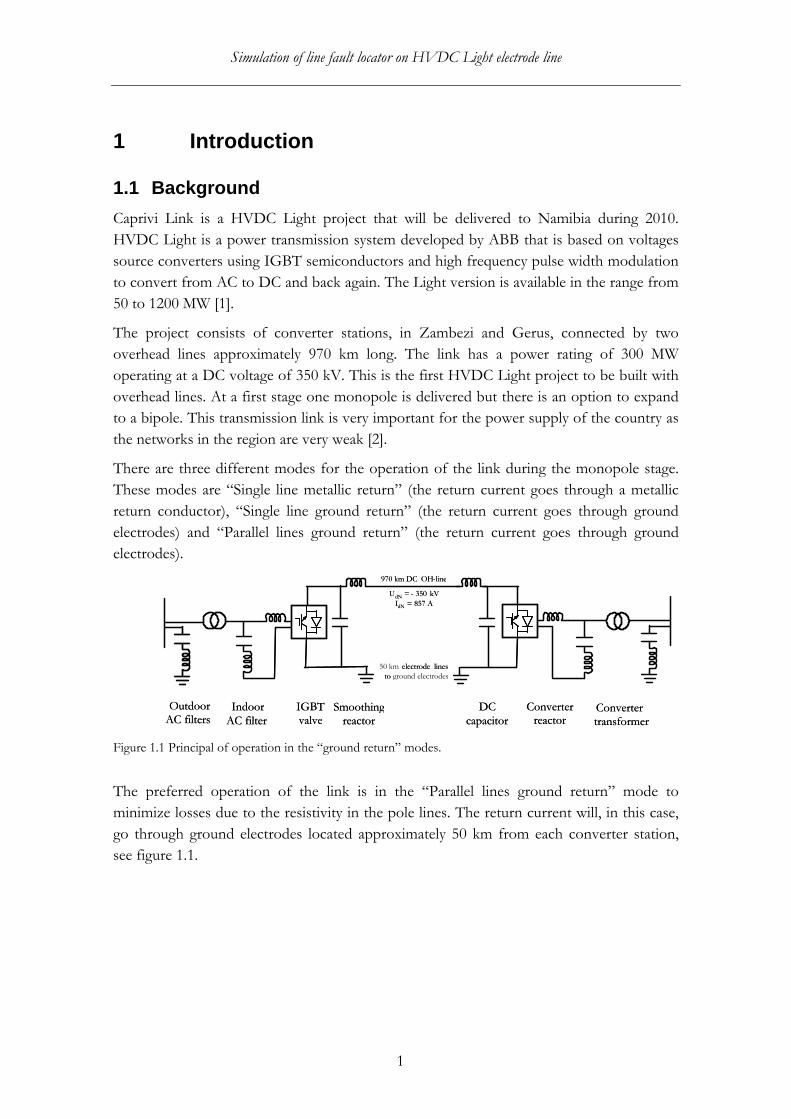
There are three different modes for the operation of the link during the monopole stage.
These modes are “Single line metallic return” (the return current goes through a metallic
return conductor), “Single line ground return” (the return current goes through ground
electrodes) and “Parallel lines ground return” (the return current goes through ground
electrodes).
Figure 1.1 Principal of operation in the “ground return” modes.
The preferred operation of the link is in the “Parallel lines ground return” mode to
minimize losses due to the resistivity in the pole lines. The return current will, in this case,
go through ground electrodes located approximately 50 km from each converter station,
see figure 1.1.
OutdoorAC filters
IndoorAC filter
IGBTvalve
Converter reactor
Converter transformer
DC capacitor
Smoothingreactor
970 km DC OH-line UdN = - 350 kV
I dN = 857 A
50 km electrode lines
to ground electrodes
OutdoorAC filters
IndoorAC filter
IGBTvalve
Converter reactor
Converter transformer
DC capacitor
Smoothingreactor
970 km DC OH-line UdN = - 350 kV
I dN = 857 A
electrode lines
to

Simulation of line fault locator on HVDC Light electrode line
2
1.2 Project description
A fault on the pole line can be detected on-line by detecting the incoming travelling waves
in each station, by comparing the arrival time of waves in the two stations the location can
be determined. However, as the voltage on the electrode lines is approximately zero or very
low, this method is not applicable.
The aim of this study is to find equipment that can detect the location of the fault along the
electrode line.
It can be off-line equipment, i.e. does not need to locate the fault when the link is in
operation. The fault locator will inject a pulse into the line and detect the time when the
reflected pulse comes back.
The simulations should answer a number of issues which affect the ability to locate a fault.
How different types of faults, distances to faults, pulse amplitude, pulse width affect the
ability to locate a fault. The simulation should also elucidate the existence of any
interference from parallel lines
1.3 Methodology
Since the electrode line is still under construction and a similar overhead line is hard to get
access to for field measurements, the study will be performed as a simulation using
PSCAD/EMTDC.
PSCAD/EMTDC is simulation software for design and verification of power systems.
EMTDC is a simulation engine and PSCAD is a graphical user interface, see figure
1.2. PSCAD/EMTDC is suitable for simulating electromagnetic transients or instantaneous
solutions.
Simplified models of the line fault locators are constructed from manufacturer’s datasheets
and information from their sales representatives. The LFL models are applied to electrode
line models with staged faults. Different parameters are varied one at a time to study the
behaviour of the LFL.

Simulation of line fault locator on HVDC Light electrode line
3
Figure 1.2 The PSCAD simulation environment.

Simulation of line fault locator on HVDC Light electrode line
4
2 Theory
2.1 Travelling waves
Any electrical charge applied to a conductor, such as a lightning stroke or the closing of a
circuit breaker, causes a rise of the potential of the conductor. This produces travelling
waves of voltage e and current i that propagates along the conductor at the speed of light.
The voltage and current waves are related by a surge impedance Z. For a lossless
transmission line, Z is dependent only to the inductance and capacitance according to
equations (1).
i
eZ =
(1)
C
LZ =
If a voltage and current wave hit a point of discontinuity in the impedance, while
propagating along a conductor, voltage and current waves are reflected backward and
transmitted forward from the point of discontinuity.
I.e. consider two conductors in series with surge impedances Z1 and Z2. Let the original
forward waves be denoted as e and i, the waves reflected backwards from the discontinuity
point be denoted e’ and i’ and the waves transmitted forward be denoted e’’ and i’’. Then
the normal equations (2) describe the travelling wave and the boundary equations (3) the
relationship at the point of discontinuity [3].
Normal equations
''''
''
2
1
1
iZe
iZe
iZe
⋅=⋅=⋅=
(2)
Boundary equations
'''
'''
iii
eee
−=+=
(3)

Simulation of line fault locator on HVDC Light electrode line
5
Then in terms of e and i we get
iZZ
Zi
iZZ
ZZi
eZZ
Ze
eZZ
ZZe
21
1
21
12
21
2
21
12
2''
'
2''
'
+⋅
=
⋅+−
=
+⋅
=
⋅+−
=
(4)
Now we can draw the following conclusions from equations (4) about the current and
voltage waves at the point of discontinuity:
If Z1=Z2, the reflected current and voltage waves are zero and the transmitted current and
voltage waves are equal to the original current and voltage waves.
If Z1<Z2, the reflected current and voltage have a lower amplitude with the same signs as
the original waves unless Z2 approaches infinity then the reflections have the same
amplitude, see figure 2.1. The amplitude of the transmitted voltage is in the range:
e < e’’ <= 2e with the same sign and the amplitude of the transmitted current is in the
range: 0 <= i’’ < i with the same sign.
Figure 2.1 Voltage reflections at a point of discontinuity where Z1<Z2.
If Z1>Z2, the reflected current and voltage waves have a lower amplitude with the opposite
signs unless Z2 is zero then the reflected current and voltage waves have the same
amplitude, see figure 2.2 . The transmitted voltage wave is in the range: 0 <= e’’ < e with
the same sign and the amplitude of the transmitted current is in the range i < i’’ <= 2i with
the same sign.
Figure 2.2 Voltage reflections at a point of discontinuity where Z1>Z2
Simulation of line fault locator on HVDC Light electrode line
6
2.2 Description of the time domain reflectometer (T DR)
A time domain reflectometer, TDR, or pulse echo meter is a device which can measure
distances to changes in the impedance of a conductor. The technique is based upon the
principle of travelling waves. A short rise time pulse is injected in the conductor and it is
partly reflected by impedance discontinuities in the line. The trace is then displayed on an
oscilloscope screen. By measuring the travel time t between the pulse is sent and a
reflection is received it’s possible to calculate the distance to the discontinuity that caused
the reflection. To calculate the distance to the fault the wave propagation speed vp has to be
known. The wave propagation speed for an overhead transmission line is close to the speed
of light and can be calculated by equation (5) [3], where L is the inductance and C is the
capacitance per unit length. Then the distance d to the fault is given by equation (6). The
wave propagation speed can also be measured with a known length of the line by
extraction from equation (6), this will give the exact propagation speed of the conductor.
LC
v p
1= (5)
2
tvd p ⋅
= (6)
By inspecting the waveform of the reflection it’s possible to determine what type of fault
caused the reflection. From the conclusions in chapter 3.1 a short circuit is represented by
a negative reflection and an open circuit represented of a positive reflection. For a high
resistance shunt fault it’s likely that the amplitude of the reflection is too small to be
detectable. To resolve this problem some TDR units have a storage function so that an old
trace can be compared with a new one, there deviations between the two traces can point
out a fault [4].
2.3 Description of the impulse thumper
An impulse thumper is a high energy capacitive discharge unit that transmit a high energy
pulse between the faulty conductor and ground. The unit basically consists of a power
supply, capacitors and a high voltage switch. When the pulse reaches the fault location it
creates an arc which makes an audible thump. The fault can then be found simply by
listening after the thump created by the arc with a microphone or a magnetic loop antenna,
however this method is not applicable on an overhead line [4].

Simulation of line fault locator on HVDC Light electrode line
7
2.4 Description of the arc reflection method
The arc reflection method combines the use of a high capacitive discharge unit and a TDR.
The thumper and the TDR are connected via a filter that protects the TDR from the high
voltage pulses created by the thumper. When the energy pulse reaches a high resistance
fault it creates an arc that lowers the resistance of the fault. Simultaneously the TDR unit
can measure the distance to the arc [4].

Simulation of line fault locator on HVDC Light electrode line
8
3 Design
3.1 Modelling of electrode line
The electrode line is connecting the converter station to the electrode station. The line
consists of two parallel overhead lines and is approximately 50 km long. Each line is of the
type Rail which has an aluminium conductor with a steel reinforcement, see table 3.1 for
conductor data. The conductors are located 23 m above ground level and 1.76 m apart at
the towers, no shield wires are used, see figure 3.1. Each conductor can be individually
disconnected at both converter and electrode station making it possible to operate in
ground return mode with only one conductor. This means that a faulty conductor can be
measured without taking the electrode station out of service.
500.0 [ohm*m]Relative Ground Permeability:
Ground Resistivity:1.0
Earth Return Formula: Analytical Approximation
23 [m]
1.76 [m]
C1 C2
Conductors: Rail
Tower: Yiduell
0 [m]
Figure 3.1 Cross section of the electrode line model.
Table 3.1 Data for the two conductors in the electrode line.
Conductor Aluminium
area [mm2]
Equivalent
copper area
[mm2]
Current rating
[A]
DC resistance
at 70° C/km
[Ω]
C1/C2 484 304 920 0,0722
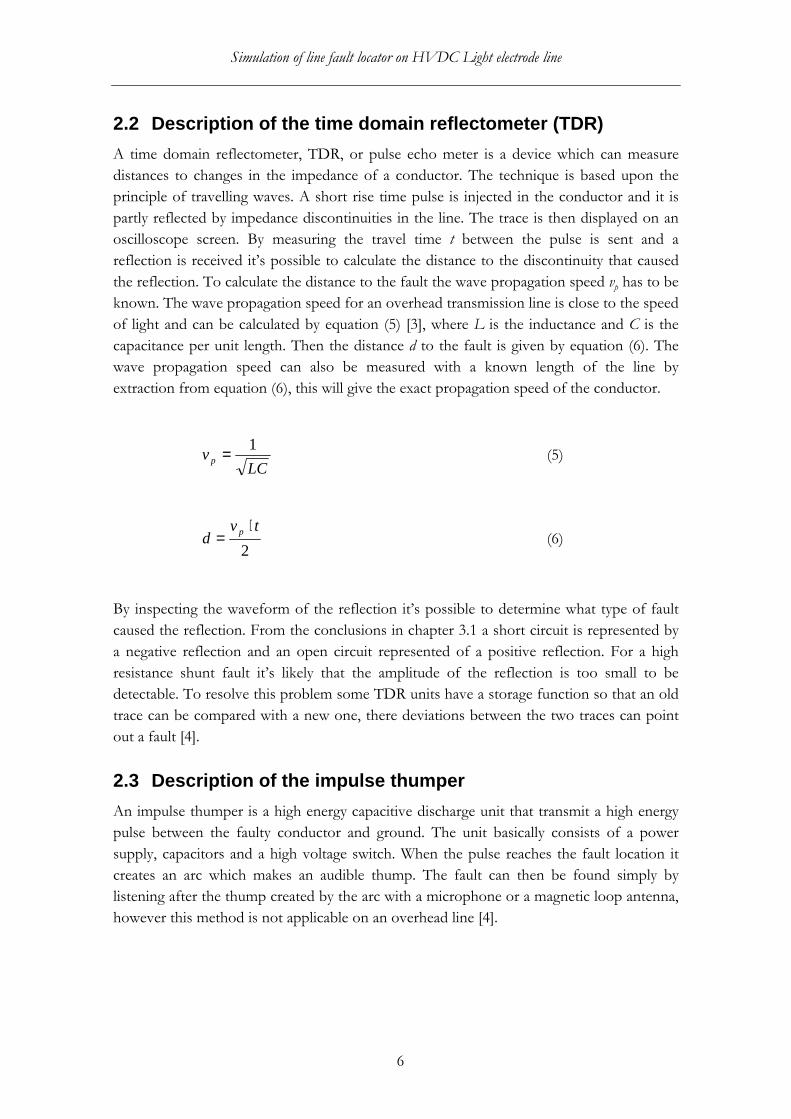
The electrode line model consists of an ideal current source and two frequency dependent
transmission line segments connected through ideal conductors. Table 3.2 shows the
settings of the transmission line model used in PSCAD/EMTDC. An electrode resistance
of 0.2 Ω has been used, which is the highest allowable resistance for the ground electrodes.
Two transmission line segments are used so that a fault can be staged anywhere along the
line by adjusting the individual length of the two segments. Figure 3.2 shows the electrode
line model with one of the two conductors disconnected at both the converter station and
the electrode station, a ground fault has also been placed between the two line segments.
Simulation of line fault locator on HVDC Light electrode line
9
Table 3.2 Transmission line model settings in PSCAD/EMTDC.
Frequency dependent (phase) model options
Travel time interpolation On
Curve fitting starting frequency 0.01 [Hz]
Curve fitting end frequency 20000 [Hz]
Total number of frequency increments 1000
Maximum order of fitting for Ysurge 20
Maximum order of fitting for prop. func. 20
Maximum fitting error for Ysurge 0.2 [%]
Maximum fitting error for prop. Func. 0.2 [%]
TLinezambeziTI10
.00
1 [o
hm
]
TLinezambe2T
Tlinezambezi
1
Tlinezambezi
1
Tlinezambe2
1
Tlinezambe2
10.2 [ohm]
0.001 [ohm]
0.001 [ohm]
Fa
ult
Figure 3.2 The electrode line model in PSCAD consists of a grounded current source, two transmission line segments with a ground fault applied between them and a resistor connected to ground representing the electrode .
Simulation of line fault locator on HVDC Light electrode line
10
3.2 Modelling of line fault locator
3.2.1 Time domain reflectometer
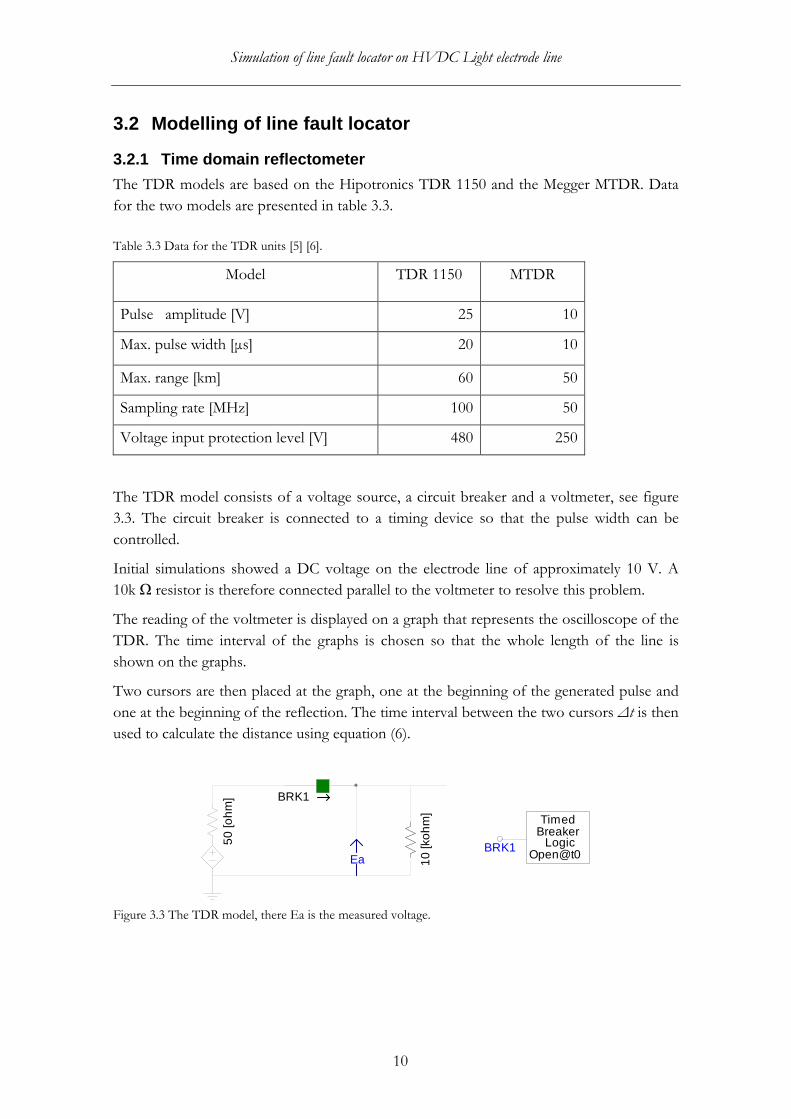
The TDR models are based on the Hipotronics TDR 1150 and the Megger MTDR. Data
for the two models are presented in table 3.3.
Table 3.3 Data for the TDR units [5] [6].
Model TDR 1150 MTDR
Pulse amplitude [V] 25 10
Max. pulse width [µs] 20 10
Max. range [km] 60 50
Sampling rate [MHz] 100 50
Voltage input protection level [V] 480 250
The TDR model consists of a voltage source, a circuit breaker and a voltmeter, see figure
3.3. The circuit breaker is connected to a timing device so that the pulse width can be
controlled.
Initial simulations showed a DC voltage on the electrode line of approximately 10 V. A
10k Ω resistor is therefore connected parallel to the voltmeter to resolve this problem.
The reading of the voltmeter is displayed on a graph that represents the oscilloscope of the
TDR. The time interval of the graphs is chosen so that the whole length of the line is
shown on the graphs.
Two cursors are then placed at the graph, one at the beginning of the generated pulse and
one at the beginning of the reflection. The time interval between the two cursors ∆t is then
used to calculate the distance using equation (6).
TimedBreaker
LogicOpen@t0
BRK150
[oh
m]
Ea
BRK1
10
[ko
hm
]
Figure 3.3 The TDR model, there Ea is the measured voltage.

Simulation of line fault locator on HVDC Light electrode line
11
3.2.2 Arc reflection
The Arc reflection model is based on the Hipotronics 5250-30 and the Megger PFL 40
series. Data for the two models are presented in table 3.4.
Table 3.4 Data for the Arc reflection units [5] [6].
Model Voltage [kV] Stored energy [J]
5250-30 0-30 2000
PFL 40 8/16/34 1500
The arc reflection model consists of a voltage source, a capacitor, two circuit breakers and
a voltmeter. The voltage source handles the charging of the capacitor. The capacitor stores
the energy released by the line fault locator. Equation 7 describes the relationship between
the energy stored in a capacitor and the voltage and capacitance.
Circuit breaker one separates the capacitor from the voltage source and circuit breaker two
releases the pulse. The voltmeter represents the oscilloscope of the TDR unit, see
figure 3.4.
2
2VCW
⋅= (7)
C
1 [o
hm
]
Ea
BRK1 BRK2
Figure 3.4 Arc reflection model.

Simulation of line fault locator on HVDC Light electrode line
12
3.3 Fault model
The fault model for ground faults consists of a fault module that can be switched on and
off. The fault module is connected in series with a resistor to ground. Two values of the
resistance are used: 1 Ω representing a short circuit to ground and a higher value of 231 Ω
which is the highest likely resistance to trip the differential protection system of the
electrode line, see table 3.5.
The electrode line has a longitudinal differential protection system that is used to detect
ground faults on the line. The protection system measures the current in both ends of the
line with DC current transducers. The system is set to alarm when a difference of 17 A is
detected [7]. This means that ground faults generating a current of 17A and above should
be localised.
The resistance of a fault that can be detected varies along the line due to the voltage drop
in the line. Close to the electrode the voltage to ground is lower than the voltage at the
converter station and a ground fault has to be of lower resistance to be detected by the
differential protection system.
Table 3.5 shows the voltage to ground (acquired by simulations in PSCAD/EMTDC) and
the maximum resistance of a ground fault that leads to an alarm (calculated by ohm’s law)
at increasing distances from the converter station. The calculations is based on a worst case
scenario with one of the electrode line conductors disconnected and the other operating at
it’s maximum current rating of 920 A.
Table 3.5 Voltage to ground and the corresponding fault resistance that leads to an alarm in the differential protection system at increasing distances from the converter station.
Distance [km] Voltage [kV] Resistance [Ω]
0 3,94 231
10 2,86 169
20 2,43 143
30 1,68 99
40 0,85 50

Simulation of line fault locator on HVDC Light electrode line
13
4 Simulations Table 4.1 shows a list of the simulations. The simulations are done by changing one
parameter at a time to be able to study changes.
Table 4.1 Issues to investigate.
No Item Issue Simulations
1 Fault type High resistance faults may be
hard to detect. Is the amplitude of
the reflection big enough to
detect?
Ground fault of 1 Ω
Ground fault of 231 Ω
Open circuit.
2 Distance to fault How does the distance from the
measuring point to the fault affect
the result?
5 km
25 km
45 km
3 Pulse width How do different pulse widths
affect the result?
1, 10 and 20 µs
4 Pulse amplitude How do different pulse
amplitudes affect the result?
25 V
10 V
5 Connection How does the connection of the
TDR to the line affect the result?
Conductor-Ground mode.
Conductor-Conductor mode.
6 Parallel line How does a parallel line in
operation affect the result?
On
Off
7 Electrode station
configuration
How does the connection of the
line to the electrode affect the
result?
Connected
Disconnected
8 Arc reflection Does a high voltage pulse
increase the performance of the
TDR?
30kV 2000J Pulse
4.1 Fault type
As default settings, pulse amplitude of 25 V and a pulse width of 10 µs have been used.
The TDR is connected between one conductor and ground as a default with the measured
conductor disconnected at the electrode station.
Simulation of line fault locator on HVDC Light electrode line
14
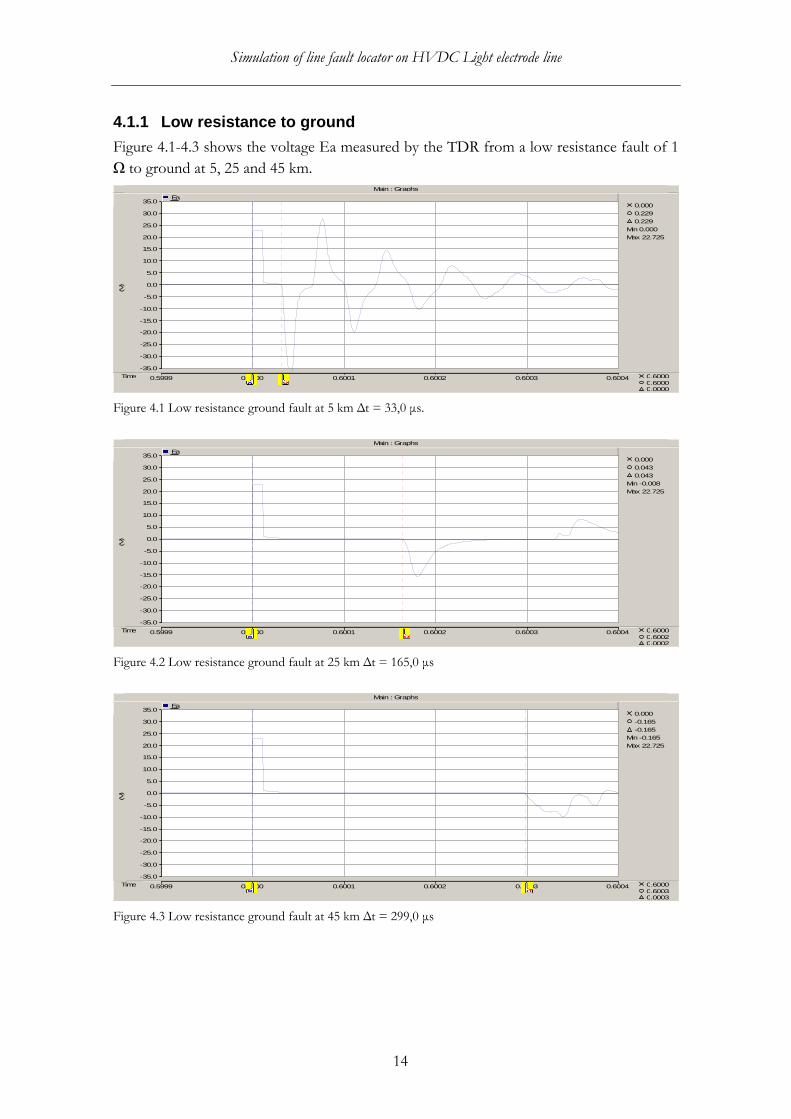
4.1.1 Low resistance to ground
Figure 4.1-4.3 shows the voltage Ea measured by the TDR from a low resistance fault of 1
Ω to ground at 5, 25 and 45 km. Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6000 0.0000
-35.0
-30.0
-25.0
-20.0
-15.0
-10.0
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
(V)
0.000 0.229 0.229
Min 0.000 Max 22.725
Ea
Figure 4.1 Low resistance ground fault at 5 km ∆t = 33,0 µs.
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6002 0.0002
-35.0
-30.0
-25.0
-20.0
-15.0
-10.0
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
(V)
0.000 0.043 0.043
Min -0.008 Max 22.725
Ea
Figure 4.2 Low resistance ground fault at 25 km ∆t = 165,0 µs
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6003 0.0003
-35.0
-30.0
-25.0
-20.0
-15.0
-10.0
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
(V)
0.000 -0.165 -0.165
Min -0.165 Max 22.725
Ea
Figure 4.3 Low resistance ground fault at 45 km ∆t = 299,0 µs

Simulation of line fault locator on HVDC Light electrode line
15
4.1.2 High resistance to ground
Figure 4.4-4.6 shows the voltage Ea measured by the TDR from a high resistance fault of
231 Ω to ground at 5, 25 and 45 km. Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6000 0.0000
-35.0
-30.0
-25.0
-20.0
-15.0
-10.0
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
(V)
0.006 -0.756 -0.762
Min -4.049 Max 22.726
Ea
Figure 4.4 High resistance ground fault at 5 km ∆t = 33,0 µs
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6002 0.0002
-35.0
-30.0
-25.0
-20.0
-15.0
-10.0
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
(V)
0.006 -0.147 -0.153
Min -0.147 Max 22.726
Ea
Figure 4.5 High resistance ground fault at 25 km ∆t = 166,0 µs
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6003 0.0003
-35.0
-30.0
-25.0
-20.0
-15.0
-10.0
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
(V)
0.006 -0.360 -0.366
Min -0.742 Max 22.726
Ea
Figure 4.6 High resistance ground fault at 45 km ∆t = 298,5 µs

Simulation of line fault locator on HVDC Light electrode line
16
4.1.3 Open circuit
Figure 4.7-4.9 shows the voltage Ea measured by the TDR from an open circuit at 5, 25
and 45 km. Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6000 0.0000
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
40.0
(V)
0.247 2.584 2.336
Min 0.247 Max 22.748
Ea
Figure 4.7 Open circuit at 5km ∆t = 33,5µs
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6002 0.0002
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
40.0
(V)
0.247 0.289 0.042
Min 0.247 Max 22.748
Ea
Figure 4.8 Open circuit at 25km ∆t = 165,0 µs
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6003 0.0003
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
40.0
(V)
0.246 0.736 0.490
Min 0.246 Max 22.748
Ea
Figure 4.9 Open circuit at 45km ∆t=299,0 µs

Simulation of line fault locator on HVDC Light electrode line
17
4.2 Pulse width
The pulse width is a way of controlling the amount of energy applied to a fault.
A simulation of pulse width settings of 1 and 20 µs applied to a high resistance fault 25 km
from the converter station is showed in figure 4.10 and 4.11. The displayed values are the
voltage Ea measured by the TDR.
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6002 0.0002
-35.0
-30.0
-25.0
-20.0
-15.0
-10.0
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
(V
)
0.006 -0.017 -0.023
Min -0.159 Max 22.653
Ea
Figure 4.10 The reflection from a 1 µs pulse is too small to detect.
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6002 0.0002
-35.0
-30.0
-25.0
-20.0
-15.0
-10.0
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
(V
)
0.006 0.058 0.052
Min -0.111 Max 22.757
Ea
Figure 4.11 The reflection from a 20 µs pulse where ∆t=165,5 µs.

Simulation of line fault locator on HVDC Light electrode line
18
4.3 Pulse amplitude
The affects of higher or lower pulse amplitude is tested by applying a lower voltage of 10 V
in addition to the previous 25 V simulations. The simulations are done with a high
resistance fault, which is likely to be the hardest to detect, at 5, 25 and 45 km and a pulse
width of 10 µs. Figure 4.12-4.14 shows the result, where the displayed values are the
voltage Ea measured by the TDR.
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6000 0.0000
-15.0
-10.0
-5.0
0.0
5.0
10.0
15.0
(V)
0.002 -0.303 -0.305
Min -1.620 Max 9.090
Ea
Figure 4.12 High resistance ground fault at 5 km ∆t=33,0 µs
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6002 0.0002
-15.0
-10.0
-5.0
0.0
5.0
10.0
15.0
(V)
0.002 0.009 0.006
Min -0.059 Max 9.090
Ea
Figure 4.13 High resistance ground fault at 25 km ∆t=167,0 µs
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6003 0.0003
-15.0
-10.0
-5.0
0.0
5.0
10.0
15.0
(V)
0.002 -0.028 -0.030
Min -0.144 Max 9.090
Ea
Figure 4.14 High resistance ground fault at 45 km ∆t=298,5 µs

Simulation of line fault locator on HVDC Light electrode line
19
4.4 Connection
By connecting the LFL to both conductors instead of one conductor and ground, another
configuration is achieved. Simulations are done for a high resistance fault and an open line.
Figure 4.15-4.17 shows the high resistance simulations at 5, 25 and 45 km distance from
the converter station. The displayed values are the voltage Ea measured by the TDR.
Main : Graphs
Time 0.6000 0.6002 0.6004 0.6000 0.6000 0.0000
-35.0 -30.0 -25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0 25.0 30.0 35.0
(V)
0.246 -0.436 -0.682
Min -2.572 Max 22.917
Ea
Figure 4.15 High resistance ground fault at 5 km ∆t=33,5 µs
Main : Graphs
Time 0.6000 0.6002 0.6004 0.6000 0.6002 0.0002
-35.0 -30.0 -25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0 25.0 30.0 35.0
(V)
0.246 0.263 0.017
Min 0.169 Max 22.917
Ea
Figure 4.16 High resistance ground fault at 25 km ∆t=165,5 µs
Main : Graphs
Time 0.6000 0.6002 0.6004 0.6000 0.6003 0.0003
-35.0 -30.0 -25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0 25.0 30.0 35.0
(V)
0.246 0.259 0.013
Min -0.093 Max 22.917
Ea
Figure 4.17 High resistance ground fault at 45 km ∆t=299,0 µs
Simulation of line fault locator on HVDC Light electrode line
20
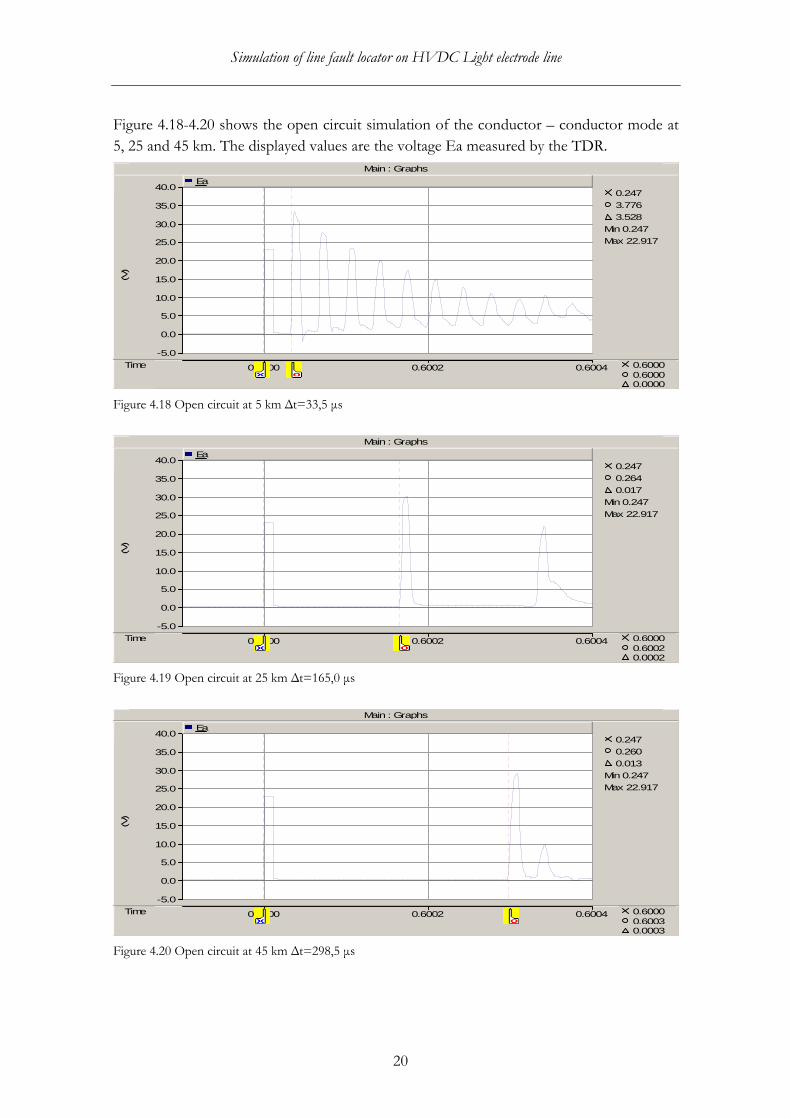
Figure 4.18-4.20 shows the open circuit simulation of the conductor – conductor mode at
5, 25 and 45 km. The displayed values are the voltage Ea measured by the TDR.
Main : Graphs
Time 0.6000 0.6002 0.6004 0.6000 0.6000 0.0000
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
40.0
(V)
0.247 3.776 3.528
Min 0.247 Max 22.917
Ea
Figure 4.18 Open circuit at 5 km ∆t=33,5 µs
Main : Graphs
Time 0.6000 0.6002 0.6004 0.6000 0.6002 0.0002
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
40.0
(V)
0.247 0.264 0.017
Min 0.247 Max 22.917
Ea
Figure 4.19 Open circuit at 25 km ∆t=165,0 µs
Main : Graphs
Time 0.6000 0.6002 0.6004 0.6000 0.6003 0.0003
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
40.0
(V)
0.247 0.260 0.013
Min 0.247 Max 22.917
Ea
Figure 4.20 Open circuit at 45 km ∆t=298,5 µs

Simulation of line fault locator on HVDC Light electrode line
21
4.5 Parallel/single line
Parallel lines give a risk of induced voltages that might affect the ability to make accurate
measurements. Therefore a simulation is made with a change in the current in one
conductor.
Figure 4.21 shows the induced voltage at the converter station when di/dt changes from 2
A /ms to 0 A /ms in the parallel conductor. The displayed value is the voltage Ea
measured by the TDR.
Main : Graphs
Time 0.580 0.590 0.600 0.610 0.620 0.630 ... ... ...
0
50
100
150
200
250
300
(V
)
Ea
Figure 4.21 The induced voltage at the converter station from a parallel line.
A simulation with a single line as a reference and for future projects was also made with a
high resistance ground fault at 5, 25 and 45 km. The results are shown in figure 4.22-4.24,
where the displayed values are the voltage Ea measured by the TDR.
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6000 0.0000
-35.0 -30.0 -25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0 25.0 30.0 35.0
(V)
0.006 -0.763 -0.769
Min -3.734 Max 22.730
Ea
Figure 4.22 High resistance ground fault at 5 km ∆t=32,0 µs

Simulation of line fault locator on HVDC Light electrode line
22
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6002 0.0002
-35.0 -30.0 -25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0 25.0 30.0 35.0
(V)
0.006 -0.028 -0.034
Min -0.337 Max 22.730
Ea
Figure 4.23 High resistance ground fault at 25 km ∆t=169,0 µs
Main : Graphs
Time 0.6000 0.6002 0.6004 0.6000 0.6003 0.0003
-35.0 -30.0 -25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0 25.0 30.0 35.0
(V)
0.006 -0.030 -0.036
Min -0.030 Max 22.730
Ea
Figure 4.24 High resistance ground fault at 45 km ∆t=306,5 µs
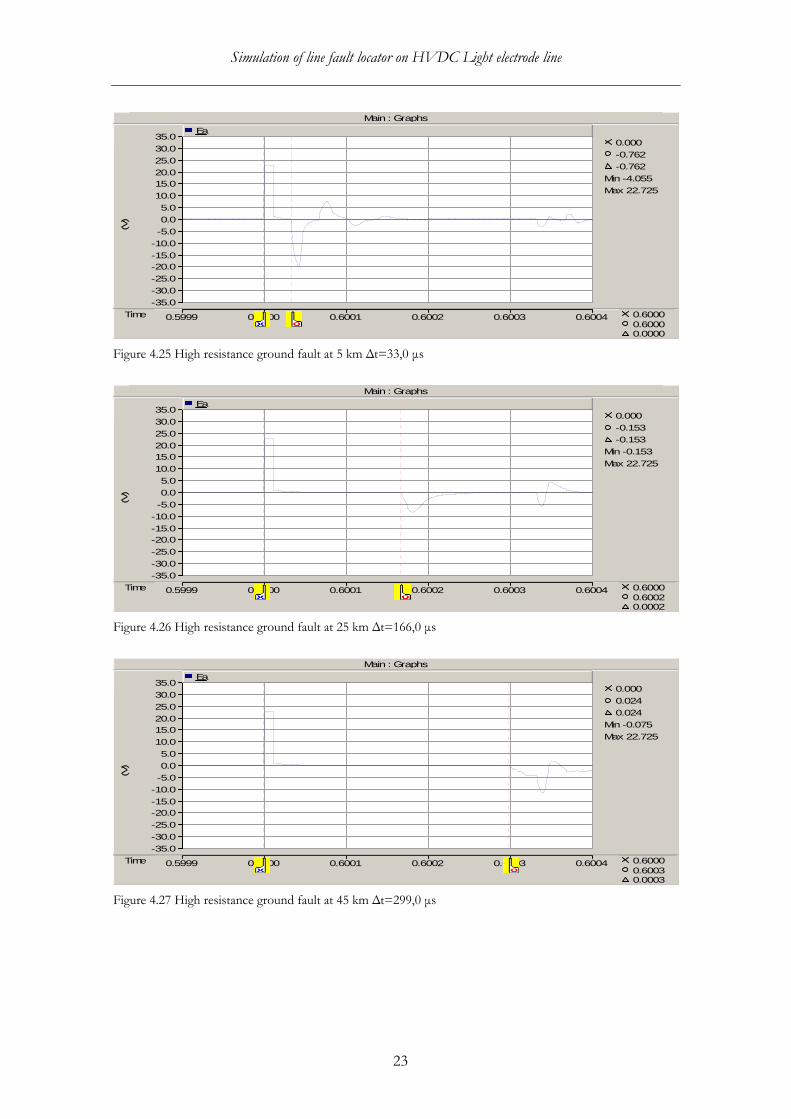
4.6 Electrode station configuration
In case of problems with the remote controlled disconnectors at the electrode station a
simulation is made with the disconnectors closed. The simulations are made with a high
resistance fault at 5, 25 and 45 km, see figure 4.25-4.27. The displayed values are the
voltage Ea measured by the TDR.
Simulation of line fault locator on HVDC Light electrode line
23
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6000 0.0000
-35.0 -30.0 -25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0 25.0 30.0 35.0
(V)
0.000 -0.762 -0.762
Min -4.055 Max 22.725
Ea
Figure 4.25 High resistance ground fault at 5 km ∆t=33,0 µs
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6002 0.0002
-35.0 -30.0 -25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0 25.0 30.0 35.0
(V)
0.000 -0.153 -0.153
Min -0.153 Max 22.725
Ea
Figure 4.26 High resistance ground fault at 25 km ∆t=166,0 µs
Main : Graphs
Time 0.5999 0.6000 0.6001 0.6002 0.6003 0.6004 0.6000 0.6003 0.0003
-35.0 -30.0 -25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0 25.0 30.0 35.0
(V)
0.000 0.024 0.024
Min -0.075 Max 22.725
Ea
Figure 4.27 High resistance ground fault at 45 km ∆t=299,0 µs

Simulation of line fault locator on HVDC Light electrode line
24
4.7 Arc reflection
Simulations with a high voltage pulse representing the Arc reflection method are done to
a high resistance ground fault at 5, 25 and 45 km, see figure 4.28-4.30. The displayed values
are the voltage Ea measured by the TDR.
Main : Graphs
0.2999 0.3000 0.3001 0.3002 0.3003 0.3004 0.3000 0.3000 0.0000
-40.0k-35.0k-30.0k-25.0k-20.0k-15.0k-10.0k-5.0k0.0 5.0k
10.0k15.0k20.0k25.0k30.0k35.0k40.0k
y (V
)
0.0069k -3.6001k -3.6070k
Min -5.5995k Max 29.6459k
Ea
Figure 4.28 High resistance ground fault at 5 km ∆t=33,5 µs
Main : Graphs
0.2999 0.3000 0.3001 0.3002 0.3003 0.3004 0.3000 0.3002 0.0002
-40.0k-35.0k-30.0k-25.0k-20.0k-15.0k-10.0k-5.0k0.0 5.0k
10.0k15.0k20.0k25.0k30.0k35.0k40.0k
y (V
)
0.0069k -0.2725k -0.2794k
Min -0.2084k Max 29.6459k
Ea
Figure 4.29 High resistance ground fault at 25 km ∆t=166,0 µs

Simulation of line fault locator on HVDC Light electrode line
25
Main : Graphs
0.2999 0.3000 0.3001 0.3002 0.3003 0.3004 0.3000 0.3003 0.0003
-40.0k-35.0k-30.0k-25.0k-20.0k-15.0k-10.0k-5.0k0.0 5.0k
10.0k15.0k20.0k25.0k30.0k35.0k40.0k
y (V
)
0.0069k 0.0372k 0.0302k
Min 0.0069k Max 29.6459k
Ea
Figure 4.30 High resistance ground fault at 45 km ∆t=297,5 µs

Simulation of line fault locator on HVDC Light electrode line
26
5 Results and analysis To be able detect a line fault with a LFL the reflection from an injected pulse has to be well
defined with significant amplitude and a preferable low rise time. High amplitude of the
reflection makes it easier to distinguish from smaller reflections caused by discontinuities in
the line. A low rise time makes it easier to point out a more precise arrival time for the
reflection and there by give a more accurate distance to the fault.
The results from the simulations are presented in tables with the travel time for the pulse
and the amplitude of the reflection. Further is the distance to the fault calculated by
equation (6) and an error is calculated by subtracting the actual distance from the calculated
distance.
The propagation speed that has been used to calculate the distances is 302,35 m/µs which
been obtained as a mean value through simulations at 45 km distance. The odd result of a
higher propagation speed than the speed of light probably comes from an inefficiently long
solution time step setting of 0,5 µs. Simulations show that by shortening the solution time
step a more accurate propagation speed can be obtained. However as a shorter solution
time step increases the simulation time the longer time step has been chosen.
5.1 Fault type
5.1.1 Low resistance ground fault
The results of the low resistance simulations (figure 4.1-4.3) are shown in table 5.1. From
the results can we see that the reflections are of reversed polarity as indicated in section 2.1.
The amplitudes of the reflections are high at a close distance but attenuate as the distance
to the faults increases. The rise time of the fault reflections is low at a close distance but
increases with increased distance. The error seams to increase with increasing distance and
the maximum error is 201 m which is approximately 0,4% of the total length of the line.
Over all the low resistance fault of 1 Ω is highly detectable in the simulation.
Table 5.1 Results from the low resistance simulation.
Fault
distance
[km]
Pulse
amplitude
[V]
Pulse
width
[µs]
Reflection
amplitude
[V]
Travel
time [µs]
Calculated
distance
[m]
Error
[m]
5 25 10 -35 33,0 4 989 -11
25 25 10 -15 165,0 24 944 -56
45 25 10 -10 299,0 45 201 201
Simulation of line fault locator on HVDC Light electrode line
27
5.1.2 High resistance ground fault
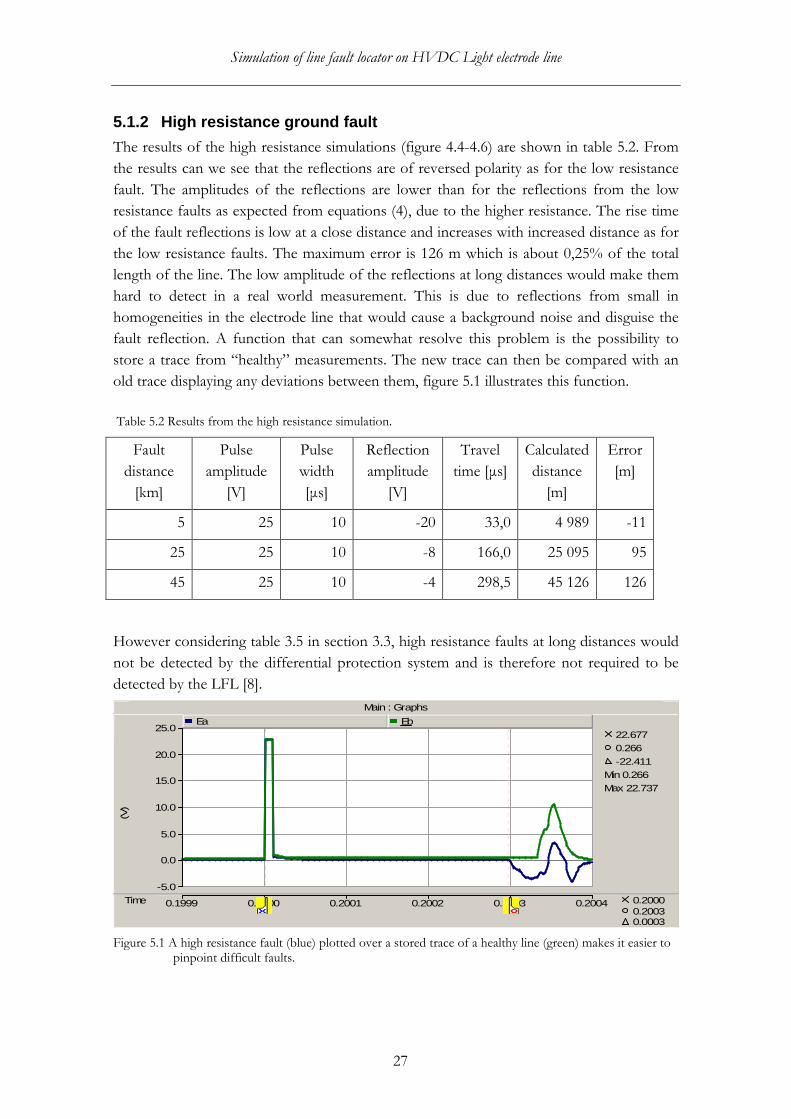
The results of the high resistance simulations (figure 4.4-4.6) are shown in table 5.2. From
the results can we see that the reflections are of reversed polarity as for the low resistance
fault. The amplitudes of the reflections are lower than for the reflections from the low
resistance faults as expected from equations (4), due to the higher resistance. The rise time
of the fault reflections is low at a close distance and increases with increased distance as for
the low resistance faults. The maximum error is 126 m which is about 0,25% of the total
length of the line. The low amplitude of the reflections at long distances would make them
hard to detect in a real world measurement. This is due to reflections from small in
homogeneities in the electrode line that would cause a background noise and disguise the
fault reflection. A function that can somewhat resolve this problem is the possibility to
store a trace from “healthy” measurements. The new trace can then be compared with an
old trace displaying any deviations between them, figure 5.1 illustrates this function.
Table 5.2 Results from the high resistance simulation.
Fault
distance
[km]
Pulse
amplitude
[V]
Pulse
width
[µs]
Reflection
amplitude
[V]
Travel
time [µs]
Calculated
distance
[m]
Error
[m]
5 25 10 -20 33,0 4 989 -11
25 25 10 -8 166,0 25 095 95
45 25 10 -4 298,5 45 126 126
However considering table 3.5 in section 3.3, high resistance faults at long distances would
not be detected by the differential protection system and is therefore not required to be
detected by the LFL [8].
Main : Graphs
Time 0.1999 0.2000 0.2001 0.2002 0.2003 0.2004 0.2000 0.2003 0.0003
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
(V)
22.677 0.266 -22.411
Min 0.266 Max 22.737
Ea Eb
Figure 5.1 A high resistance fault (blue) plotted over a stored trace of a healthy line (green) makes it easier to pinpoint difficult faults.

Simulation of line fault locator on HVDC Light electrode line
28
Table 5.2 Results from the high resistance simulation.
Fault
distance
[km]
Pulse
amplitude
[V]
Pulse
width
[µs]
Reflection
amplitude
[V]
Travel
time [µs]
Calculated
distance
[m]
Error
[m]
5 25 10 -20 33,0 4 989 -11
25 25 10 -8 166,0 25 095 95
45 25 10 -4 298,5 45 126 126
5.1.3 Open circuit
The results of the open circuit simulations (figure 4.7-4.9) are shown in table 5.3. From the
results can we see that the reflections are of the same polarity as the original pulse,
indicating that the fault is of a high resistance series character. The amplitudes of the
reflections are higher at a close distance but attenuate as the distance to the faults increases
as for the ground faults. The rise time of the fault reflections seams to be lower than for
the ground faults although the error shows no sign of improvement with a maximum error
of 201 m. The simulations show that an open circuit fault ought to be easier to detect than
ground faults due to the high amplitudes of the reflections.
Table 5.3 Results from open circuit simulation.
Fault
distance
[km]
Pulse
amplitude
[V]
Pulse
width
[µs]
Reflection
amplitude
[V]
Travel
time [µs]
Calculated
distance
[m]
Error
[m]
5 25 10 32 33,5 5 064 64
25 25 10 17 165,0 24 944 -56
45 25 10 10 299,0 45 201 201
5.2 Pulse width
The results of the pulse width simulations (figure 4.10-4.11) that were applied to a high
resistance ground fault are shown in table 5.4. The amplitudes of the reflections are higher
with a longer pulse width, this is probably from the increased amount of energy delivered
to the fault. The shorter pulse width of 1 µs is hardly detectable and a pulse width of at
least 10 µs preferable 20 µs seams suitable for a longer overhead line. A possible
application for a short pulse width is if the fault is close to the measuring point and longer
pulse widths would disguise it. The rise time of the fault reflections seams to be unaffected
by the longer pulse width. Further shows the error no difference between the two
detectable traces.

Simulation of line fault locator on HVDC Light electrode line
29
Table 5.4 Results from the pulse width simulation.
Fault
distance
[km]
Pulse
amplitude
[V]
Pulse
width
[µs]
Reflection
amplitude
[V]
Travel
time [µs]
Calculated
distance
[m]
Error
[m]
25 25 1 0 - - -
25 25 10 -8 166,0 25 095 95
25 25 20 -13 165,5 25 019 19
5.3 Pulse amplitude
The results of the pulse amplitude simulations (figure 4.12-4.14) that were applied to a high
resistance ground fault are shown in table 5.5. The amplitudes of the 10 V pulse reflections
are roughly in the same area as for the 25 V pulse amplitudes calculated as fractions of the
original pulses. The rise time of the fault reflections seams also to be unaffected by
differences in the pulse amplitude, this is somewhat expected due to the linearity of the
fault model. Further shows the error no bigger difference between the different pulse
amplitudes. The simulations show no difference between the pulse amplitudes and no
conclusions can be made stating that higher or lower pulse amplitude is better. A possible
reason for choosing lower pulse amplitude would be measurements on low voltage control
cables reducing the risk of interference. However as the LFL is to be used on an overhead
line this is not an issue of interest and higher pulse amplitude should be preferred due to
the higher energy delivered to the fault.
Table 5.5 Results from the pulse amplitude simulation.
Fault
distance
[km]
Pulse
amplitude
[V]
Pulse
width
[µs]
Reflection
amplitude
[V]
Travel
time [µs]
Calculated
distance
[m]
Error
[m]
5 10 10 -8 33,0 4 989 -11
25 10 10 -3 167,0 25 246 246
45 10 10 -2 298,5 45 126 126
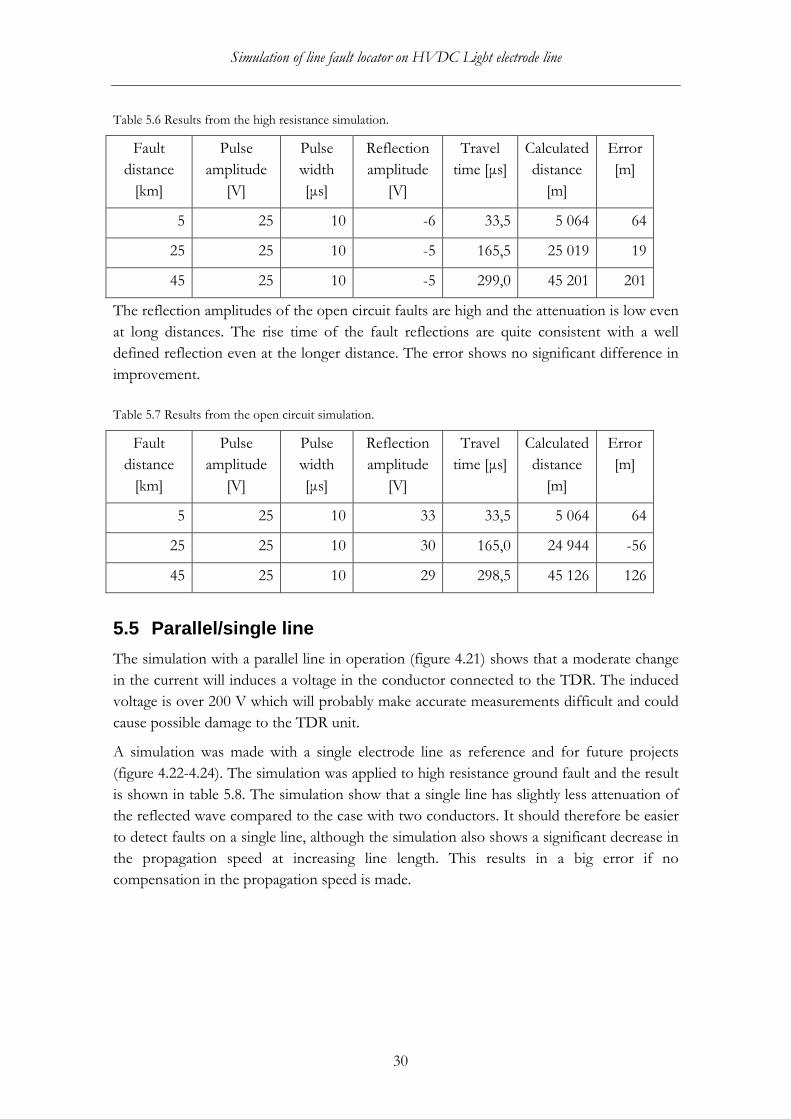
5.4 Connection
The results of the simulations with the TDR connected between the two conductors (figure
4.15-4.20) are shown in table 5.6 for the high resistance fault and in table 5.7 for the open
circuit. The reflections of the high resistance faults are lower at short distances although
they are more constant throughout the length of the line. The rise time of the fault
reflections are also quite consistent with a well defined reflection even at the longer
distance. The error shows no significant improvement to previous simulations.
Simulation of line fault locator on HVDC Light electrode line
30
Table 5.6 Results from the high resistance simulation.
Fault
distance
[km]
Pulse
amplitude
[V]
Pulse
width
[µs]
Reflection
amplitude
[V]
Travel
time [µs]
Calculated
distance
[m]
Error
[m]
5 25 10 -6 33,5 5 064 64
25 25 10 -5 165,5 25 019 19
45 25 10 -5 299,0 45 201 201
The reflection amplitudes of the open circuit faults are high and the attenuation is low even
at long distances. The rise time of the fault reflections are quite consistent with a well
defined reflection even at the longer distance. The error shows no significant difference in
improvement.
Table 5.7 Results from the open circuit simulation.
Fault
distance
[km]
Pulse
amplitude
[V]
Pulse
width
[µs]
Reflection
amplitude
[V]
Travel
time [µs]
Calculated
distance
[m]
Error
[m]
5 25 10 33 33,5 5 064 64
25 25 10 30 165,0 24 944 -56
45 25 10 29 298,5 45 126 126
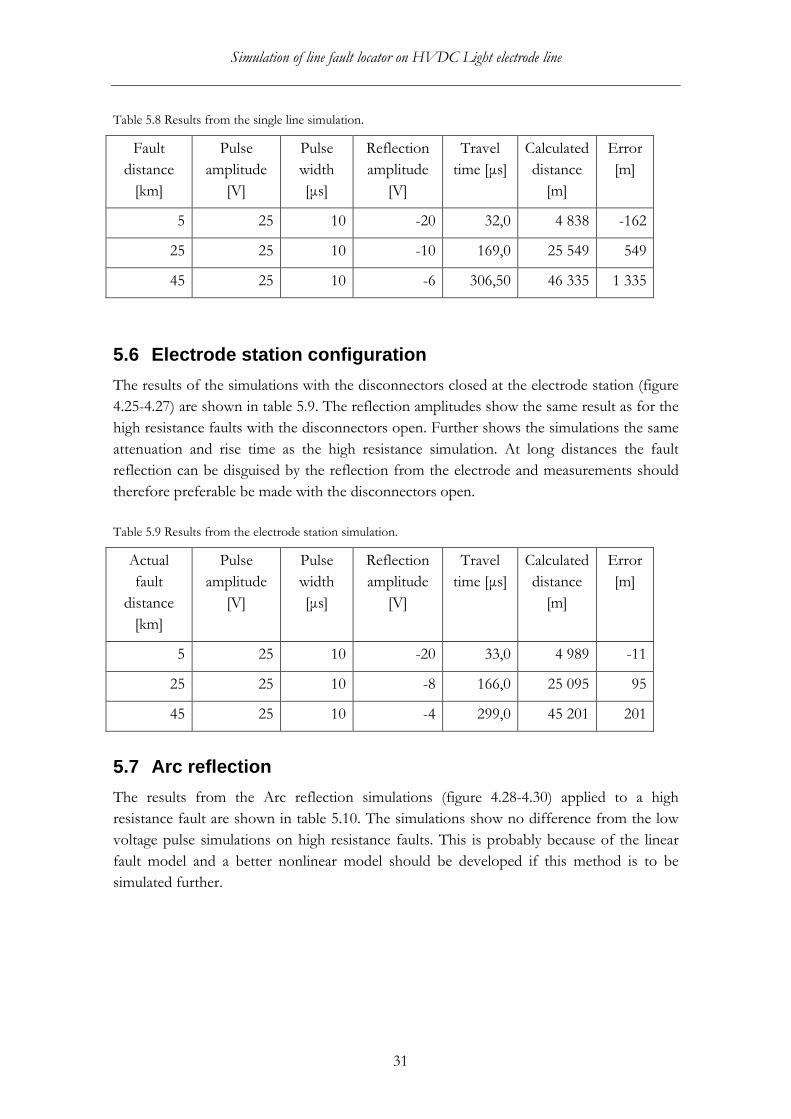
5.5 Parallel/single line
The simulation with a parallel line in operation (figure 4.21) shows that a moderate change
in the current will induces a voltage in the conductor connected to the TDR. The induced
voltage is over 200 V which will probably make accurate measurements difficult and could
cause possible damage to the TDR unit.
A simulation was made with a single electrode line as reference and for future projects
(figure 4.22-4.24). The simulation was applied to high resistance ground fault and the result
is shown in table 5.8. The simulation show that a single line has slightly less attenuation of
the reflected wave compared to the case with two conductors. It should therefore be easier
to detect faults on a single line, although the simulation also shows a significant decrease in
the propagation speed at increasing line length. This results in a big error if no
compensation in the propagation speed is made.
Simulation of line fault locator on HVDC Light electrode line
31
Table 5.8 Results from the single line simulation.
Fault
distance
[km]
Pulse
amplitude
[V]
Pulse
width
[µs]
Reflection
amplitude
[V]
Travel
time [µs]
Calculated
distance
[m]
Error
[m]
5 25 10 -20 32,0 4 838 -162
25 25 10 -10 169,0 25 549 549
45 25 10 -6 306,50 46 335 1 335
5.6 Electrode station configuration
The results of the simulations with the disconnectors closed at the electrode station (figure
4.25-4.27) are shown in table 5.9. The reflection amplitudes show the same result as for the
high resistance faults with the disconnectors open. Further shows the simulations the same
attenuation and rise time as the high resistance simulation. At long distances the fault
reflection can be disguised by the reflection from the electrode and measurements should
therefore preferable be made with the disconnectors open.
Table 5.9 Results from the electrode station simulation.
Actual
fault
distance
[km]
Pulse
amplitude
[V]
Pulse
width
[µs]
Reflection
amplitude
[V]
Travel
time [µs]
Calculated
distance
[m]
Error
[m]
5 25 10 -20 33,0 4 989 -11
25 25 10 -8 166,0 25 095 95
45 25 10 -4 299,0 45 201 201
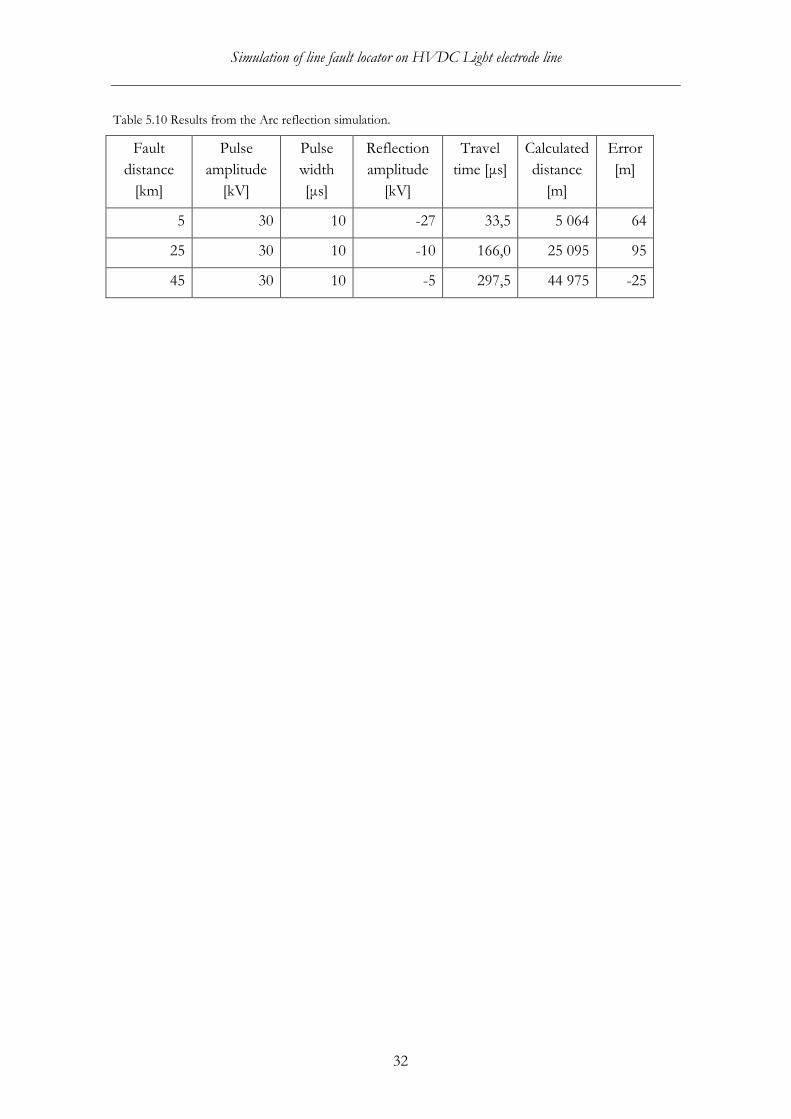
5.7 Arc reflection
The results from the Arc reflection simulations (figure 4.28-4.30) applied to a high
resistance fault are shown in table 5.10. The simulations show no difference from the low
voltage pulse simulations on high resistance faults. This is probably because of the linear
fault model and a better nonlinear model should be developed if this method is to be
simulated further.
Simulation of line fault locator on HVDC Light electrode line
32
Table 5.10 Results from the Arc reflection simulation.
Fault
distance
[km]
Pulse
amplitude
[kV]
Pulse
width
[µs]
Reflection
amplitude
[kV]
Travel
time [µs]
Calculated
distance
[m]
Error
[m]
5 30 10 -27 33,5 5 064 64
25 30 10 -10 166,0 25 095 95
45 30 10 -5 297,5 44 975 -25

Simulation of line fault locator on HVDC Light electrode line
33
6 Conclusions and future work The results of the simulations show that it is possible to detect faults of both open circuit
and ground fault types with a suitable TDR unit. Ground faults with high resistance
occurring at long distances can be hard to detect due to the low reflection amplitudes. This
problem can somewhat be resolved with a function that lets the user compare an old trace
of a “healthy” line with the new trace. The study shows that most of the faults can be
detected and the distance to the fault can be calculated within an accuracy of ± 250 m,
although further studies with field measurements and staged line faults should determine a
more precise accuracy of the final LFL.
The pulse width of the TDR needs to be at least 10 µs, preferable 20 µs to deliver high
enough energy to the fault to create a detectable reflection. The pulse amplitude seams to
be of less significance in this simulation, although higher pulse amplitude is likely to be
more suitable in a real measurement due to the higher energy delivered to the fault. The
Hipotronics TDR 1150 is a unit that fulfil these requirements and should therefore be able
to work as a LFL on the electrode line.
Further shows the simulation with the TDR connected between the two conductors that
this is a possible way of decreasing the rise time of the reflections and thereby increasing
the accuracy, however further field studies can clarify this.
The simulations show a risk of high voltage transients if measurements are done with a
parallel line in operation. This is due to induction from current changes in the parallel
conductor and could cause possible damage to a TDR unit.
In the case with a single conductor the simulation shows less attenuation of the reflections
and a fault should therefore be easier to detect. Although a significant decrease of the wave
propagation speed at increasing distance to the fault was detected. This results in a
substantial error in the calculated distance if no compensations are made to the
propagation speed.
Simulations with the electrode line connected to the electrode shows that high resistance
ground faults close to the electrode station can be disguised by the reflection of the
electrode. Measurements should therefore preferable be made with the disconnectors open
at the electrode station.
The simulation of the Arc reflection method, which combines the use of a TDR and a high
energy impulse generator, shows no improvement to the stand-alone TDR unit. This can
be explained with the linear fault model and a better fault model has to be developed to
study this method further.

Simulation of line fault locator on HVDC Light electrode line
34
References
1. ABB AB (2010) Easy introduction for laypersons [Electronic] ABB AB Available: <http://www.abb.com/industries/us/9AAF400197.aspx> [2010-04-06]
2. ABB AB (2010) Caprivi Link Interconnector [Electronic] ABB AB Available: <http://www.abb.com/cawp/gad02181/a93201eafb31ba07c125738000468455.aspx> [2010-04-06]
3. Hileman, Andrew R (1999) Insulation Coordination for Power Systems Marcel Dekker
4. Gill, Paul (2008) Electrical Power Equipment Maintenance and Testing CRC Press
5. Hipotronics (2010) Products - Cable Fault Locating Equipment [Electronic] Hipotronics Available: <http://www.hipotronics.com/products/cable-fault-locating-equipment/> [2010-04-06]
6. Megger (2010) PFL40A-1500 [Electronic] Megger Available: <http://www.megger.com/se/products/ProductDetails.php?ID=1227&Description= > [2010-04-06]
7. ABB AB 1JNL100119-686 HVDC Protection System Unpublished manuscript ABB AB
8. ABB AB 06MR0005 Rev.00 Caprivi Link Interconnector Converter Stations Project Volume 3 Sec 7.1.12.2 Unpublished manuscript ABB AB




![Performance of HVDC Ground Electrode in Various Soil ... Ground Electrode Design.pdf · [1,2]. Presently, a number of major HVDC projects are taking place in China. The increased](https://static.fdocuments.net/doc/165x107/5ea61723a0035a42982b4ad7/performance-of-hvdc-ground-electrode-in-various-soil-ground-electrode-designpdf.jpg)