Report on Fiber Optics

of 15
Transcript of Report on Fiber Optics
-
8/17/2019 Report on Fiber Optics
1/15
Chapter 1-Introduction
With the invention of the laser in 1960’s, a great interest in optical systems for data
communications began. The invention of laser, motivated researchers to study the
potential of fiber optics for data communications, sensing, and other applications.Laser systems could send a much larger amount of data than microave, and other
electrical systems. The first e!periment ith the laser involved the free
transmission of the laser beam in the air. "esearchers also conducted e!periments
by transmitting the laser beam through different types of aveguides. #lass fibers
soon became the preferred medium for transmission of light. $nitially, the e!istence
of large losses in optical fibers prevented coa!ial cables from being replaced by
optical fibers. %arly fibers had losses around 1000 d&'(m ma(ing them impractical
for communications use . $n 1969, several scientists concluded that impurities in
the fiber material caused the signal loss in optical fibers. &y removing these
impurities, construction of lo)loss optical fibers as possible. The ability to carry
gigabits of information at the speed of light increased the research potential in
optical fibers. Last revolution emerged as designers to combine the product
outgroths of fiber optic telecommunications ith optoelectronic devices to create
fiber optic sensors. $n parallel ith these developments, fiber optic sensor
technology has been a significant user of technology related ith the
optoelectronic and fiber optic communication industry.
*iber optic sensors are e!cellent candidates for monitoring environmental changes
and they offer many advantages over conventional electronic sensors as listed
belo+1.1%asy integration into a ide variety of structures, including composite
materials, ith little interference due to their small sie and cylindrical geometry.
1.-$nability to conduct electric current.
1.$mmune to electromagnetic interference and radio fre/uency interference.
1. Lighteight,"obust, more resistant to harsh environments.
1.2igh sensitivity.
1.63ultiple!ing capability to form sensing netor(s
1.4"emote sensing capability, 3ultifunctional sensing capabilities such as strain,
pressure, corrosion, temperature and acoustic signals.
1
-
8/17/2019 Report on Fiber Optics
2/15
Chapter 2-Optical Fiber Basics
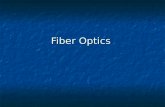
5n optical fiber is composed of three parts the core, the cladding, and the coating
or buffer. The basic structure is shon in *igure 1. The core is a cylindrical rod of dielectric material and is generally made of glass. Light propagates mainly along
the core of the fiber 718.
*igure 1. &asic structure of an optical fiber.
The cladding layer is made of a dielectric material ith an inde! of refraction. The
inde! of refraction of the cladding material is less than that of the core material.
The cladding is generally made of glass or plastic. The cladding e!ecutes such
functions as decreasing loss of light from core into the surrounding air, decreasing
scattering loss at the surface of the core, protecting the fiber from absorbing the
surface contaminants and adding mechanical strength.
The coating or buffer is a layer of material used to protect an optical fiber from
physical damage. The material used for a buffer is a type of plastic. The buffer is
elastic in nature and prevents abrasions .
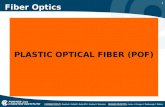
The light)guiding principle along the fiber is based on the total internal
reflection:. The angle at hich total internal reflection occurs is called the critical
angle of incidence. 5t any angle of incidence, greater than the critical angle, light
is totally reflected bac( into the glass medium ;see *igure-s La. ?ptical fiber is an e!ample of
electromagnetic surface aveguide .
2
-
8/17/2019 Report on Fiber Optics
3/15
*igure -. Total internal reflection in an optical fiber.
?ptical fibers are divided into to groups called single mode and multimode. $n
classifying the inde! of refraction profile, e differentiate beteen step inde! and
gradient inde!. =tep inde! fibers have a constant inde! profile over the hole cross
section. #radient inde! fibers have a nonlinear, rotationally symmetric inde!
profile, hich falls off from the center of the fiber outards .
3
-
8/17/2019 Report on Fiber Optics
4/15
Chapter 3 -Fiber Optic Sensor Principles
$t consists of an optical source ;Laser, L%@, Laser diode etc
-
8/17/2019 Report on Fiber Optics
5/15
&ased on the application, a fiber optic sensor can be classified as follos
.1 Bhysical sensors+ Csed to measure physical properties li(e temperature, stress,
etc.
.- Dhemical sensors+ Csed for p2 measurement, gas analysis spectroscopic
studies, etc.
. &io)medical sensors+ Csed in bio)medical applications li(e measurement of
blood flo, glucose content etc.
5
-
8/17/2019 Report on Fiber Optics
6/15
Chapter 4-Fiber Optic Sensor Types
4.1 Intensity Based Fiber Optic Sensors
$ntensity)based fiber optic sensors rely on signalundergoing some loss. They are
made by using anapparatus to convert hat is being measured into a force that
bends the fiber and causes attenuation of the signal.
?ther ays to attenuate the signal is through absorption or scattering of a target.
The intensity)based sensor re/uires more light and therefore usually uses
multimode large core fibers . There are a variety of mechanisms such as
microbending loss, attenuation, and evanescent fields that can produce a
measurand)induced change in the optical intensity propagated by an optical fiber.
The advantages of these sensors are+ =implicity of implementation, lo cost,
possibility of being multiple!ed, and ability to perform as real distributed sensors.
The drabac(s are+ "elative measurements and variations in the intensity of the
light source may lead to false readings, unless a referencing system is used .
?ne of the intensity)based sensors is the microbend sensor, hich is based on the
principle that mechanical periodic micro bends can cause the energy of the guided
modes to be coupled to the radiation modes and conse/uently resulting in
attenuation of the transmitted light. The sensor is comprised of to grooved plates
and beteen them an optical fiber passes.The upper plate can move in response to pressure. When the bend radius of the
fiber e!ceeds the critical angle necessary to confine the light to the core area, light
starts lea(ing into the cladding resulting in an intensity 3odulation.
5nother type of intensity based fiber optic sensor is the evanescent ave sensor
that utilies the light energy hich lea(s from the core into the cladding. These
sensors are idely used as chemical sensors. The sensing is accomplished by
stripping the cladding from asection of the fiber and using a light source having a
avelength that can be absorbed by the chemical that is to be detected. The
resulting change in light intensity is a measure of the chemical concentration.
3easurements can also be performed in a similar method by replacing the cladding
ith a material such as an organic dye hose optical properties can be changed by
the chemical underinvestigation .
6
-
8/17/2019 Report on Fiber Optics
7/15
.
*igure . %vanescent ave fiber optic chemical sensor.
4.2 a!elen"th #odulated Fiber Optic Sensors
Wavelength modulated sensors use changes in the avelength of light for
detection. *luorescence sensors, blac( body sensors, and the &ragg grating sensor are e!amples of avelength)modulated sensors. *luorescent based fiber sensors
are being idely used for medical applications, chemical sensing and physical
parameter measurements such as temperature, viscosity and humidity.
?ne of the simplest avelength based sensor is theblac(body sensor as shon in
*igure 9. 5 blac(body cavity is placed at the end of an optical fiber. When the
cavity rises in temperature it starts to glo and act as a light source. @etectors in
combination ith narro band filters are then used to determine the profile of the
blac(body curve. This type of sensor has been successfully commercialied and
has been used to measuretemperature to ithin a fe degrees centigrade under intense "* fields.
The most idely used avelength based sensor is the &ragg grating sensor. *iber
&ragg gratings ;*s< are formed by constructing periodic changes in inde! of
refraction in the core of a single mode optical fiber. This periodic change in inde!
of refraction is normally created by e!posing the fiber core to an intense
interference pattern of CE energy. The variation in refractive inde! so produced,
7
-
8/17/2019 Report on Fiber Optics
8/15
forms an interference pattern hich acts as a grating. $n &ragg grating sensor
operation here light from a broadband source ;L%@< hose center avelength is
close to the &ragg avelength is launched into the fiber. The light propagates
through the grating, and part of the signal is reflected at the &ragg avelength. The
complimentary part of the process shos a small sliver of signal removed from the
total transmitted signal. This obviously shos the &ragg grating to be an
effectiveoptical filter
4.3 Phase #odulated Fiber Optic Sensors
Bhase modulated sensors use changes in the phase of light for detection. The
optical phase of the light passingthrough the fiber is modulated by the field to be
detected. This phase modulation is then detected interferometerically, bycomparing the phase of the light in the signal fiber to that in a reference fiber. $n an
interferometer, the light is split into to beams, here one beam is e!posed to the
sensing environment and undergoes a phase shift and the other is isolated from the
sensing environment and is used for as a reference. ?nce the beams are
recombined, they interfere ith each other. 3ach)Fehnder, 3ichelson, *abry)
Berot, =agnac, polarimetric, and grating interferometers are the most
commonly used intereferometers. There are similarities and differences beteen
the 3ichelson and 3achGFehnder interferometers. $n terms of similarities, the
3ichelson is often considered to be folded 3achGFehnder, and vice versa.3ichelson configuration re/uires only one optical fiber coupler. &ecause the light
passes both through the sensing and reference fibers tice, the optical phase shift
per unit length of fiber is doubled. Thus, the 3ichelson can intrinsically have
better sensitivity. 5nother clear advantage of the 3ichelson is that the sensor can
be interrogated ith only a single fiber beteen the source)detector module and
the sensor. 2oever, a good)/uality reflection mirror is re/uired for the 3ichelson
interferometer.
5nother commonly used interferometer based sensor is the *abry)Berot
interferometric sensor ;**B$< and is classified into to categories+ %!trinsic *abry)
Berot interferometer ;%*B$< sensor and intrinsic *abry)Berot interferometer ;$*B$<sensor. $n an %*B$ sensor, the *abry) Berot cavity is outside the fiber. *iber guides
the incident light into to the **B$ sensor and then collects and the reflected light
signal from the sensor. $n an $*B$ sensor, the mirrors are constructed ithin the
fiber. The cavity beteen to mirrors acts both as sensing element and aveguide.
$n this case, the light never leaves the fiber . *igure 1- shos a typical %*B$ sensor
based on capillary tube.
8
-
8/17/2019 Report on Fiber Optics
9/15
?ne cleaved fiber end ;lead)in< is inserted into a glass capillary tube and another
cleaved fiber end ;target< is inserted into the tube from the other end. &oth lead)in
and target fibers are thermal fusion bonded ith the tube. The cavity length
beteen the to fibers is controlled using a precision optical positioner prior to the
thermal fusion bonding. ?ne of the advantages of this %*B$ strain sensor is that its
gauge length and cavity length can be different. The strain sensitivity is determined
by the gauge length, hile the temperature sensitivity is determined only by cavity
length since the fiber and tube have the same thermal e!pansion coefficients.
2ence, by ma(ing the gauge length much longer than the cavity length, the
sensor temperature sensitivity becomes much less than the strain sensitivity. =o, no
temperature compensation is re/uired. 5n $*B$ sensor contains to mirrors
separated by a distance ithin a fiber core. The earliest $*B$ sensor probably is the
spliced Ti?- thin film coated fiber $*B$ sensor. $n this sensor internal mirror isintroduced in fiber by thin film deposition on the cleaved fiber end folloed by
fusion splicing. =everal other methods are also used to produce internal mirror,
such as using vacuum deposition, magnetron sputtering, or e)beam evaporation .
=agnac interferometric sensors are based on fiber gyroscopes that can be used to
sense angular velocity. *iber gyroscopes are based on the principle that application
of force changes the avelength of light as it travels around a coil of optical fiber.
$t may also be occupied to measure time varying influences such asacoustics and
vibration. To types of fiber optic gyros have been developed+ ?pen loop fiber
optic gyro and closed loop fiber optic gyro.
$n open loop fiber optic gyro a broadband light source is used to inAect light into an
input or output fiber coupler. The input light beam passes through a polarier
hich is used to ma(e certain the mutuality of the counter propagating light beams
through the fiber coil. The second central coupler shares the to light beams into
the fiber optic coil here they pass through a modulator. $t is used to produce a
time altering output signal indicative of rotation. The modulator is offset from the
center of the coil for emphasiing a proportional phase difference beteen the
counter propagating lightbeams. 5fter light beams propagate from modulator, they
reAoin and pass through the polarier. *inally, light beams are guided onto the
output detector .The second type is the closed loop fiber optic gyro that is primarily aimed at
vacuum to high accuracy navigation applications. They have high turning rates and
need highlinearity and large dynamic ranges This type of sensor is used as a
modulator in the fiber optic coil to produce a phase shift at a certain rate. When the
coil is rotated, a first harmonic signal is contributed ith phase hich depends on
9
-
8/17/2019 Report on Fiber Optics
10/15
rotation rate. This manner is similar to open loop fiberoptic gyro hich is
described before .
4.4 Polari$ation #odulated Fiber Optic Sensors
The direction of the electric field portion of the light field is defined as the
polariation state of the light field. @ifferent types of polariation states of the light
field are linear,elliptical, and circular polariation states. *or the linearpolariation
state, the direction of the electric field alays(eeps in the same line during the
light propagation. *or the elliptical polariation state, the direction of the electric
fieldchanges during the light propagation. The end of the electric field vector forms
an elliptical shape hence, it is called HHelliptical polaried light:.
The refractive inde! of a fiber changes hen it undergoes stress or strain. Thus,there is an induced phase difference beteen different polariation directions. This
phenomenon is called photoelastic effect. 3oreover, the refractive inde! of a fiber
undergoing a certain stress or strain is called induced refractive inde!. The induced
refractive inde! changes ith the direction of applied stress or strain. Thus, there is
an induced phase difference beteen different polariation directions. $n other
ords, under the e!ternal perturbation, such as stress or strain, the optical fiber
or(s li(e a linear retarder. Therefore, by detecting the change in the output
polariation state, the e!ternal perturbation can be sensed .
Bolariationbased fiber optic sensor is formed by polariing the light from a lightsource via a polarier that could be a length of polariation)preserving fiber. The
polaried light is launched at degrees to the preferred a!es of a length of bi)
refrigent polariation)preserving fiber. This section of fiber is served as sensing
fiber. Cnder e!ternal perturbation such as stress or strain, the phase difference
beteen to polariation states is changed. Then, the output polariation state is
changed according to the perturbation. 2ence, by analying the output polariation
state at the e!it end of the fiber, the e!ternal perturbation can be detected.
Chapter %-&pplications o' Fiber Optic Sensors
10
-
8/17/2019 Report on Fiber Optics
11/15
*iber optic sensors are used in several areas.
=pecifically+
.13easurement of physical properties such as strain displacement, temperature,
pressure, velocity, andacceleration in structures of any shape or sie.
.- 3onitoring the physical health of structures in real time.
. &uildings and &ridges+ Doncrete monitoring during setting, crac( ;length,
propagation speed< monitoring, prestressing monitoring, spatial displacement
measurement, neutral a!is evolution, long)term deformation ;creep and shrin(age<
monitoring, concrete)steel interaction, and post seismic damageevaluation.
. Tunnels+ 3ultipoint optical e!tensometers, convergence monitoring, shotcrete '
prefabricated vaults evaluation, and Aoints monitoring damage detection.
. @ams+ *oundation monitoring, Aoint e!pansion monitoring, spatial
displacement measurement, lea(age monitoring, and distributed temperature
monitoring.
.6 2eritage structures+ @isplacement monitoring, crac( opening analysis, post)
seismic damage evaluation, restoration monitoring, and old)ne interaction.
(.Future o' 'iber optics sensor
11
-
8/17/2019 Report on Fiber Optics
12/15
(.1 )IST*IB+T,) &CO+STICS S,SI
5 system that can turn any stretch of fiber)optic cable into a microphone or otherremote sensor has been developed by C.I. scientists.C.I.)based ?pta=ense, calls
it @istributed 5coustic =ensing. @5= allos to monitor e!tremely long assets
;such as pipelines, rail trac(s and roads< ith a level of protection previously
unmatched. $n effect, it puts a microphone every 10 meters. $n one deployment it is
protecting a pipeline nearly 400 (ilometers long.The technology uses a ell (non
effect of fiber)optic cables called "ayleigh scattering.
When you pass laser light don a fiber)optic cable you get bac(scatter 7light
reflected bac(8. With highly coherent laser you are able to 7produce8 e!actly the
same pulse time after time. Jou ill then get e!actly the same bac(scatter bac(,
unless something affects it.: What ?pta=ense did as to combine that
(noledge ith very advanced sonar technology found in submarines.
the technology monitors everything around the cable it is accurate enough to listen
for tunneling beneath it, or even lo)flying aircraft above it. $ts uses for border or
perimeter security is clear.it’s the combination of sonar technology and fiber that
ma(es the system so poerful.
We don’t Aust listen, e process it as ell, and that allos our customers to ma(e
real time decisions,:
$t is able to trac( a vehicle driving along the road. 5s it pic(s up speed, the
indicator trac(ing the vehicle changes from green to orange, arning that it is
approaching the speed limit. When it e!ceeds it, the mar(er goes red. $f you
have DDTE connected, you have an image of e!actly ho that as.:
The number of uses of the technology is beildering from trac(ing vehicle flo
on motorays to trac(ing ta!iing aircraft at airports.
12
-
8/17/2019 Report on Fiber Optics
13/15
(.2 The lon"est 'ibre-optic sensor net/or0 that eists is
de!eloped 'or the reote onitorin" o' lar"e in'rastructures
$n her Bh@ thesis, 3ontserrat *ernKnde)EalleAo, a telecommunications engineer
and graduate of the CB5)Bublic Cniversity of avarre, has e!perimentally
developed various fibre)optic sensor netor(s for the remote monitoring of large
infrastructures. =pecifically, she has managed to develop the largest netor( so far
in e!istence Mmeasuring -0 (mM, hich is e/uipped ith a multiple!ing
capability, ;hich enables to or more information channels to be combined
ithin a single transmission medium
-
8/17/2019 Report on Fiber Optics
14/15
Conclusion
5n overvie of fiber optics sensors and their applications has been presented. The
maAor types of sensors discussed included microbending sensors, evanescent ave
sensors, *s, optical fiber interferometers,andpolariation modulated fiber opticsensors.
14
-
8/17/2019 Report on Fiber Optics
15/15
*e'erences
1.Cdd, %., *iber ?ptic =mart =tructures, Broceedings of
$%%%, vol. N, no. 6, NNON9, 1996.
-.optical fiber communication by #erd Ieiser
.Wi(ipedia
15