Pt3Part 3 Chapter9Chapter 9cau.ac.kr/~jjang14/NAE/Chap9.pdf · • Fl t C ’RlFor larger systems,...
25
P t3 P ar t 3 Chapter 9 Chapter 9 G Eli i ti Gauss Elimination All images copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. PowerPoints organized by Dr. Michael R. Gustafson II, Duke University Revised by Prof. Jang, CAU
Transcript of Pt3Part 3 Chapter9Chapter 9cau.ac.kr/~jjang14/NAE/Chap9.pdf · • Fl t C ’RlFor larger systems,...

P t 3Part 3Chapter 9Chapter 9
G Eli i tiGauss Elimination
All images copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display.
PowerPoints organized by Dr. Michael R. Gustafson II, Duke UniversityRevised by Prof. Jang, CAU

Chapter ObjectivesChapter ObjectivesKno ing ho to sol e small sets of linear eq ations• Knowing how to solve small sets of linear equations with the graphical method and Cramer’s rule.
• Understanding how to implement forward elimination g pand back substitution as in Gauss elimination.
• Understanding how to count flops to evaluate the efficiency of an algorithmefficiency of an algorithm.
• Understanding the concepts of singularity and ill-condition.
d di h i l i i i i l d• Understanding how partial pivoting is implemented and how it differs from complete pivoting.
• Recognizing how the banded structure of a tridiagonalRecognizing how the banded structure of a tridiagonalsystem can be exploited to obtain extremely efficient solutions.

Graphical MethodGraphical Method• Small numbers (n<=3) of
equations: Graphical methodequations: Graphical method, Cramer’s rule, elimination of unknowns.
• For small sets of simultaneous equations, graphing them and determining the location ofdetermining the location of the intercept provides a solution.
• Ex. for three (two) simultaneous equations, the point where the three planespoint where the three planes (two lines) intersect would represent the solution.p

Graphical Method (cont)p ( )• Graphing the equations can also show
systems where:systems where:a) No solution existsb) Infinite solutions exist
Singularb) Infinite solutions existc) System is ill-conditioned
• Extremely sensitive to roundoff errorAlmost Singular
Extremely sensitive to roundoff error.• The point of intersection is difficult to detect
visually.

DeterminantsDeterminants• The determinant D=|A| of a matrix is formed from theThe determinant D |A| of a matrix is formed from the
coefficients of [A].• Determinants for small matrices are:
11 a11 a11
a11 a122 2a11 a12
a21 a22
a11a22 a12a21
a11 a12 a13
3 3a11 a12 a13
a21 a22 a23
a a a a11
a22 a23
a32 a33
a12
a21 a23
a31 a33
a13
a21 a22
a31 a32
• Determinants for matrices larger than 3 x 3 can be very
a31 a32 a33
complicated.

Cramer’s RuleCramer s Rule
• Cramer’s Rule states that each unknown in a system of linear algebraic equations y g qmay be expressed as a fraction of two determinants with denominator D anddeterminants with denominator D and with the numerator obtained from D by replacing the column of coefficients ofreplacing the column of coefficients of the unknown in question by the constants b1, b2, …, bn.

Cramer’s Rule ExampleCramer s Rule Example
i d i h f ll i f i• Find x2 in the following system of equations:0.3x1 0.52x2 x3 0.01
0.5x1 x2 1.9x3 0.67
• Find the determinant D0.1x1 0.3x2 0.5x3 0.44
0.3 0.52 11 1.9 0.5 1.9 0.5 1
• Find determinant D by replacing D’s second column with b
D 0.5 1 1.90.1 0.3 0.5
0.3.9
0.3 0.5 0.52
0.5 .90.1 0.5
10.50.1 0.4
0.0022
• Find determinant D2 by replacing D s second column with b
D2 0.3 0.01 10.5 0.67 1.9 0.3
0.67 1.90 44 0
0.010.5 1.90 1 0
10.5 0.670 1 0 44
0.0649
• Divide
2
0.1 0.44 0.50.44 0.5 0.1 0.5 0.1 0.44
D 0 0649x2 D2
D
0.06490.0022
29.5

Naïve Gauss EliminationNaïve Gauss Elimination
F l t C ’ R l• For larger systems, Cramer’s Rule can become unwieldy.
• Instead a sequential process of removing• Instead, a sequential process of removing unknowns from equations using forward elimination followed by backwardelimination followed by backward substitution may be used - this is Gauss elimination.
• “Naïve” Gauss elimination simply means the process does not check for potential
bl l i f di i i bproblems resulting from division by zero. ->not need pivoting.

Naïve Gauss Elimination (cont)( )
• Forward elimination– Starting with the first row, add or
subtract multiples of that row to eliminate the first coefficient from the second row and beyond.y
– Continue this process with the second row to remove the second coefficient from the third row and beyondbeyond.
– Stop when an upper triangular matrixremains.
• Back substitution– Starting with the last row, solve for
the unknown, then substitute that l i t th t hi h tvalue into the next highest row.
– Because of the upper-triangular nature of the matrix, each row will contain only one more unknown.y

Naïve Gauss Elimination (cont)
• N equations:
( )
N equations:
Pi t l t Pi t ti
n bxaxaxaxa 111113112111
Pivot element Pivot equation
n bxaxaxaxa
222223222121
nnnnnnn bxaxaxaxa 332211

Naïve Gauss Elimination (cont)
Forward Elimination:
( )
Forward Elimination: Reduce the set of equations to an upper triangular
matrix.
Eliminate the first unknown x1 from the second through the nth equations. To do this, multiply the first equation by a21/a11to givegive
111
211
11
21313
11
21212
11
21121 b
aaxa
aaxa
aaxa
aaxa nn
This equation can be subtracted from the second equation by:
aaa
111
2121
11
212212
11
2122 b
aabxa
aaaxa
aaa nnn
''' b22222or bxaxa nn

Naïve Gauss Elimination (cont)The procedure is repeated for the remaining equations.
( )
''''
'2
'23
'232
'22
11313212111
nn
nn
bxaxaxabxaxaxabxaxaxaxa
''3
'32
'2
33333232
nnnnnn
nn
bxaxaxa
bxaxaxa
Using the second pivot equation to remove x2 from the third through the nth equations to give
3322 nnnnnn
through the nth equations to give
'2
'23
'232
'22
11313212111
nn
nn
bxaxaxabxaxaxaxa
"""
"3
"33
"33
22323222
nn
nn
bxaxa
""3
"3 nnnnn bxaxa

Naïve Gauss Elimination (cont)
l h h f ll i f i
( )
Lastly we can have the following set of equations:
11313212111 nn bxaxaxaxa
"3
"33
"33
'2
'23
'232
'22
nn
nn
bxaxabxaxaxa
)1()1( nnn
nnn bxa

Naïve Gauss Elimination (cont)
Backward substitution
( )
ac a d subst tut o
'2
'23
'232
'22
11313212111
nn
nn
bxaxaxabxaxaxaxa
"3
"33
"33
22323222
nn
nn
bxaxa
)1()1( nnn
nnn bxa
)1( nb 1
)1()1( n
ijj
iij
ii xab
(i 1 2 1)
)1( nnn
nn a
bx)1(1
iii
iji a
x
There is only one variable (i = n-1, n-2, ,1)There is only one variable in the (n-1)th row.

Example 9 3 (1/2)Example 9.3 (1/2)Q. Use the Gaussian elimination to find the solution.
(S l ti 3 2 5 d 7)(Solution: x1 = 3, x2 = -2.5, and x3 = 7)
3193071085.7 0.21.03 321
xxxxxx
Forward elimination:
4.71 10 .203.03.193.07 1.0
321
321
xxxxxx
Forward elimination:
5617.19293333.07.00333 85.7 0.2 1.0 3
32
321
xxxxx
6150.70 0200.10 190000.0 32 xx
8570 2103 xxx
0843.70 0120.10 5617.19293333.07.00333 85.70.2 1.0 3
3
32
321
xxxxxx
3
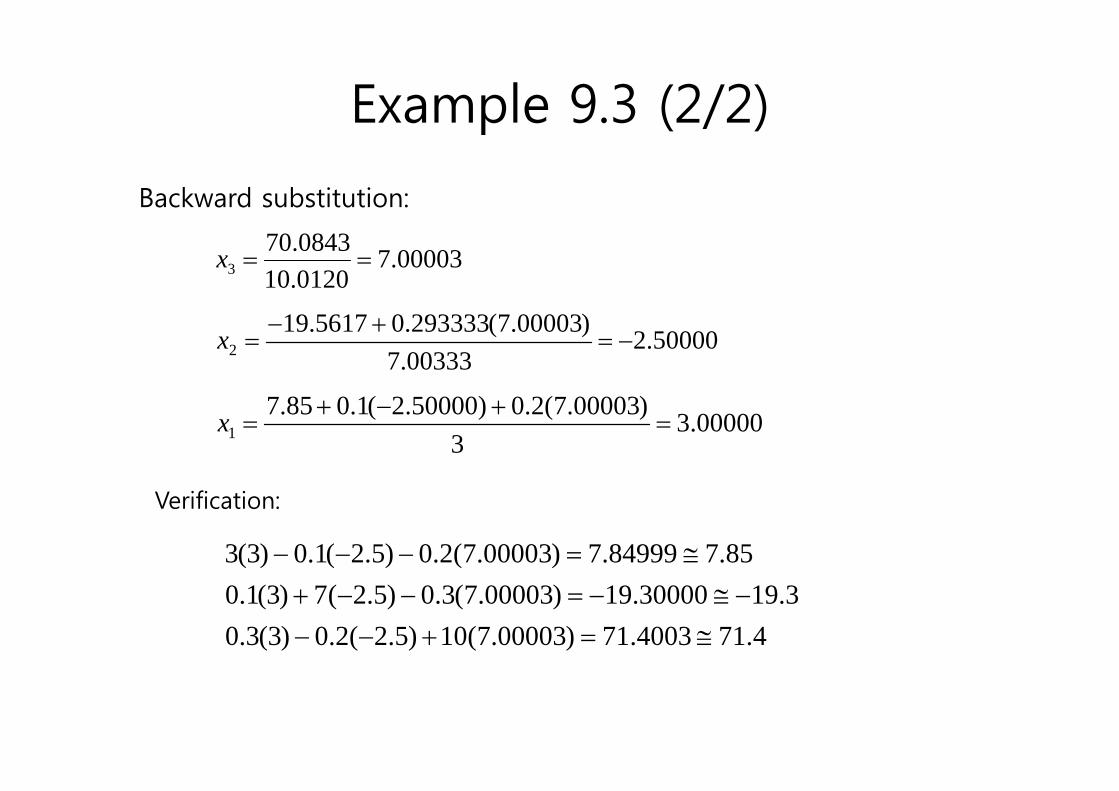
Example 9.3 (2/2)p ( / )
Backward substitution:
결과를 확인하면 00003.70120.100843.70
3 x
50000.200333.7
)00003.7(293333.05617.192
x
00000.33
)00003.7(2.0)50000.2(1.085.71
x
85.784999.7)00003.7(2.0)5.2(1.0)3(3
Verification:
4.714003.71)00003.7(10)5.2(2.0)3(3.03.1930000.19)00003.7(3.0)5.2(7)3(1.0

Naïve Gauss Elimination ProgramNaïve Gauss Elimination Program

Gauss Program EfficiencyGauss Program Efficiency• The execution of Gauss elimination depends on theThe execution of Gauss elimination depends on the
amount of floating-point operations (or flops). The flop count for an n x n system is:
ForwardElimination
2n3
3O n2 3
BackSubstitution n2 O n
2 3
Total 2n3
3O n2
• Conclusions:– As the system gets larger, the computation time increases greatly.
f h ff i i d i h li i i– Most of the effort is incurred in the elimination step.

PivotingPivoting
P bl i ith ï G li i ti if• Problems arise with naïve Gauss elimination if a coefficient along the diagonal is 0 (problem: division by 0) or close to 0 (problem: round-off y ) (perror)
• One way to combat these issues is to determine the coefficient with the largest absolute value inthe coefficient with the largest absolute value in the column below the pivot element. The rows can then be switched so that the largest element i h i l Thi i ll d i l i iis the pivot element. This is called partial pivoting.
• If the rows to the right of the pivot element are also checked and columns switched this is calledalso checked and columns switched, this is called complete pivoting. -> It is rarely used. Add complexity.

Partial Pivoting Programg g

Example 9 4 ( ti l i ti ) (1/3)Example 9.4 (partial pivoting) (1/3)Q. Use the Gaussian elimination to solve this.
0001.20000.30003.0 21 xx
0 0003 i l t 0 ti l i ti i
0000.10000.10000.1 21 xx
a11 = 0.0003 is very close to 0, so partial pivoting is made. Solution: x1 = 1/3 and x2 = 2/3Solution: x1 = 1/3 and x2 = 2/3.
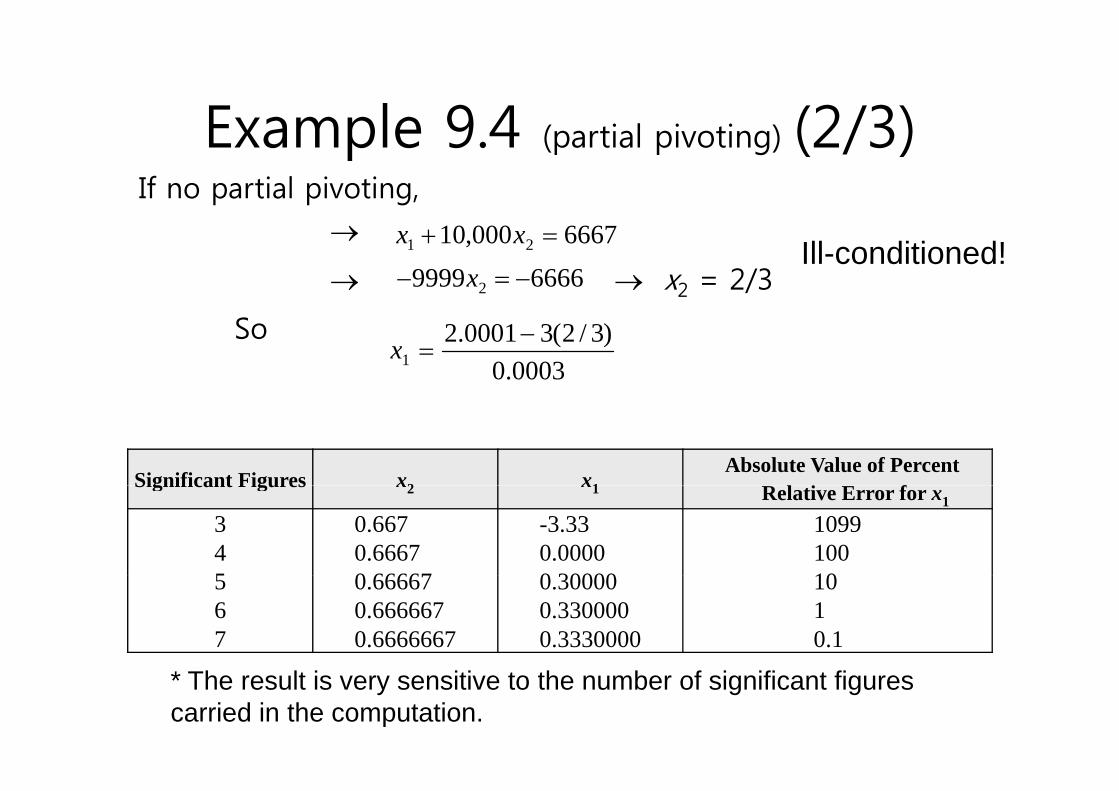
Example 9 4 ( ti l i ti ) (2/3)If no partial pivoting,
Example 9.4 (partial pivoting) (2/3)
x2 = 2/3
6667000,10 21 xx66669999 2 x
Ill-conditioned!
So0003.0
)3/2(30001.21
x
Significant Figures x2 x1Absolute Value of Percent
Significant Figures x2 x1 Relative Error for x1
345
0.6670.66670 66667
-3.330.00000 30000
1099100105
67
0.666670.6666670.6666667
0.300000.3300000.3330000
1010.1
* The result is very sensitive to the number of significant figures carried in the computation.

Example 9.4 (partial pivoting) (3/3)p (p p g) ( / )• With partial pivoting
x2 = 2/3 and0000.10000.10000.1 21 xx0001.20000.30003.0 21 xx
)3/2(1x
Significant Figures x2 x1Absolute Value of Percent
11 x
Significant Figures x2 x1 Relative Error for x1
345
0.6670.66670 66667
0.3330.33330 33333
0.10.010 0015
67
0.666670.6666670.6666667
0.333330.3333330.3333333
0.0010.00010.00001

Tridiagonal SystemsTridiagonal Systems• A tridiagonal system is a banded system with aA tridiagonal system is a banded system with a
bandwidth of 3:f1 g1
x1 r1 f1 g1e2 f2 g2
e3 f3 g3
x1x2x3
r1r2r3
e f g
x 1
r 1
• Tridiagonal systems can be solved using the same
en1 fn1 gn1en fn
xn1xn
rn1
rn
• Tridiagonal systems can be solved using the same method as Gauss elimination, but with much less effort because most of the matrix elements areeffort because most of the matrix elements are already 0.

Tridiagonal System SolverTridiagonal System Solver