Modelling and Simulations - دانشگاه آزاد اسلامی واحد نجف...
12
International Review on Modelling and Simulations (IREMOS) Contents: Optimization of Augmented Rails in Augmented-Parallel Railgun by Augmented-Lagrangian Genetic Algorithm by Mehrdad Jafarboland, Mehdi Peyvandi 458 Input-State Feedback Linearization Control of Three-Phase Dual-Bridge Matrix Converters Operating Under Unbalanced Source Voltages by Mahmoud Hamouda, Farhat Fnaiech, Kamal Al-Haddad 467 A New Switching Technique and Optimum Computation of DC Sources in Three-Phase Multilevel Inverter by J. Ebrahimi, G. Mokhtari, B. Vahidi 478 Optimal Design of Passive Filters for Voltage Source Inverters by H. Sarabadani, H. Feshki Farahani 485 Comparison Performances of Asymmetric Multilevel Inverters in the Maximum Voltage Rating of Power Electronic Devices by Bambang Sujanarko, Mochamad Ashari, Mauridhi Hery Purnomo 493 Computer Aided Design Tools in RF Power Amplifier Design by Abdullah Eroglu 501 Detailed Analysis of Cascaded Multilevel Converter Based STATCOM by M. Heidari, A. Kovsarian, S. GH. Seifossadat 507 Steady-State Electromagnetic and Thermal Modelling of an Induction Motor Under Healthy Operation and Under Broken-Bar Fault by Joya C. Kappatou, Dimitrios C. Stellas 517 Improved Simulation Strategy for DFIG in Wind Energy Applications by Ali M. Eltamaly, A. I. Alolah, M. H. Abdel-Rahman 525 Elimination Chaotic Ferroresonance in Autotransformers Including Linear and Nonlinear Core Losses Effect Considering Neutral Earth Resistance by Hamid Radmanesh, Roozbeh Kamali 533 Comparison of the Effect of Phase to Ground Faults and Three Phase Faults in a Micro-Turbine Generation System by Goodarz Cheraghi, Abdolreza Tavakoli, Seyed Hossein Alavi, Saeed Ahmadi, Seyed Morteza Alizadeh 541 (continued on inside back cover) ISSN 1974-9821 Vol. 4 N. 2 April 2011 PART A
Transcript of Modelling and Simulations - دانشگاه آزاد اسلامی واحد نجف...

International Review on Modelling and Simulations
(IREMOS)
Contents:
Optimization of Augmented Rails in Augmented-Parallel Railgun by Augmented-Lagrangian Genetic Algorithm by Mehrdad Jafarboland, Mehdi Peyvandi
458
Input-State Feedback Linearization Control of Three-Phase Dual-Bridge Matrix Converters Operating Under Unbalanced Source Voltages by Mahmoud Hamouda, Farhat Fnaiech, Kamal Al-Haddad
467
A New Switching Technique and Optimum Computation of DC Sources in Three-Phase Multilevel Inverter by J. Ebrahimi, G. Mokhtari, B. Vahidi
478
Optimal Design of Passive Filters for Voltage Source Inverters by H. Sarabadani, H. Feshki Farahani
485
Comparison Performances of Asymmetric Multilevel Inverters in the Maximum Voltage Rating of Power Electronic Devices by Bambang Sujanarko, Mochamad Ashari, Mauridhi Hery Purnomo
493
Computer Aided Design Tools in RF Power Amplifier Design by Abdullah Eroglu
501
Detailed Analysis of Cascaded Multilevel Converter Based STATCOM by M. Heidari, A. Kovsarian, S. GH. Seifossadat
507
Steady-State Electromagnetic and Thermal Modelling of an Induction Motor Under Healthy Operation and Under Broken-Bar Fault by Joya C. Kappatou, Dimitrios C. Stellas
517
Improved Simulation Strategy for DFIG in Wind Energy Applications by Ali M. Eltamaly, A. I. Alolah, M. H. Abdel-Rahman
525
Elimination Chaotic Ferroresonance in Autotransformers Including Linear and Nonlinear Core Losses Effect Considering Neutral Earth Resistance by Hamid Radmanesh, Roozbeh Kamali
533
Comparison of the Effect of Phase to Ground Faults and Three Phase Faults in a Micro-Turbine Generation System by Goodarz Cheraghi, Abdolreza Tavakoli, Seyed Hossein Alavi, Saeed Ahmadi, Seyed Morteza Alizadeh
541
(continued on inside back cover)
ISSN 1974-9821Vol. 4 N. 2April 2011
PART
A

International Review on Modelling and Simulations (IREMOS)
Editor-in-Chief: Santolo Meo Department of Electrical Engineering FEDERICO II University 21 Claudio - I80125 Naples, Italy [email protected]
Editorial Board: Marios Angelides (U.K.) Brunel University M. El Hachemi Benbouzid (France) Univ. of Western Brittany- Electrical Engineering Department Debes Bhattacharyya (New Zealand) Univ. of Auckland – Department of Mechanical Engineering Stjepan Bogdan (Croatia) Univ. of Zagreb - Faculty of Electrical Engineering and Computing Cecati Carlo (Italy) Univ. of L'Aquila - Department of Electrical and Information Engineering Ibrahim Dincer (Canada) Univ. of Ontario Institute of Technology Giuseppe Gentile (Italy) FEDERICO II Univ., Naples - Dept. of Electrical Engineering Wilhelm Hasselbring (Germany) Univ. of Kiel Ivan Ivanov (Bulgaria) Technical Univ. of Sofia - Electrical Power Department Jiin-Yuh Jang (Taiwan) National Cheng-Kung Univ. - Department of Mechanical Engineering Heuy-Dong Kim (Korea) Andong National Univ. - School of Mechanical Engineering Marta Kurutz (Hungary) Technical Univ. of Budapest Baoding Liu (China) Tsinghua Univ. - Department of Mathematical Sciences Pascal Lorenz (France) Univ. de Haute Alsace IUT de Colmar Santolo Meo (Italy) FEDERICO II Univ., Naples - Dept. of Electrical Engineering Josua P. Meyer (South Africa) Univ. of Pretoria - Dept.of Mechanical & Aeronautical Engineering Bijan Mohammadi (France) Institut de Mathématiques et de Modélisation de Montpellier Pradipta Kumar Panigrahi (India) Indian Institute of Technology, Kanpur - Mechanical Engineering Adrian Traian Pleşca (Romania) "Gh. Asachi" Technical University of Iasi Ľubomír Šooš (Slovak Republic) Slovak Univ. of Technology - Faculty of Mechanical Engineering Lazarus Tenek (Greece) Aristotle Univ. of Thessaloniki Lixin Tian (China) Jiangsu Univ. - Department of Mathematics Yoshihiro Tomita (Japan) Kobe Univ. - Division of Mechanical Engineering George Tsatsaronis (Germany) Technische Univ. Berlin - Institute for Energy Engineering Ahmed F. Zobaa (U.K.) Brunel University - School of Engineering and Design
The International Review on Modelling and Simulations (IREMOS) is a publication of the Praise Worthy Prize S.r.l.. The Review is published bimonthly, appearing on the last day of February, April, June, August, October, December. Published and Printed in Italy by Praise Worthy Prize S.r.l., Naples, April 30, 2011. Copyright © 2011 Praise Worthy Prize S.r.l. - All rights reserved. This journal and the individual contributions contained in it are protected under copyright by Praise Worthy Prize S.r.l. and the following terms and conditions apply to their use: Single photocopies of single articles may be made for personal use as allowed by national copyright laws. Permission of the Publisher and payment of a fee is required for all other photocopying, including multiple or systematic copying, copying for advertising or promotional purposes, resale and all forms of document delivery. Permission may be sought directly from Praise Worthy Prize S.r.l. at the e-mail address: [email protected] Permission of the Publisher is required to store or use electronically any material contained in this journal, including any article or part of an article. Except as outlined above, no part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without prior written permission of the Publisher. E-mail address permission request: [email protected] Responsibility for the contents rests upon the authors and not upon the Praise Worthy Prize S.r.l.. Statement and opinions expressed in the articles and communications are those of the individual contributors and not the statements and opinions of Praise Worthy Prize S.r.l.. Praise Worthy Prize S.r.l. assumes no responsibility or liability for any damage or injury to persons or property arising out of the use of any materials, instructions, methods or ideas contained herein. Praise Worthy Prize S.r.l. expressly disclaims any implied warranties of merchantability or fitness for a particular purpose. If expert assistance is required, the service of a competent professional person should be sought.

International Review on Modelling and Simulations (I.RE.MO.S.), Vol. 4, N. 2
April 2011
Manuscript received and revised March 2011, accepted April 2011 Copyright © 2011 Praise Worthy Prize S.r.l. - All rights reserved
525
Improved Simulation Strategy for DFIG in Wind Energy Applications
Ali M. Eltamaly1, A. I. Alolah1, M. H. Abdel-Rahman2
Abstract – A detailed computer simulation for interconnecting wind energy system to electric utility is presented. The proposed system consists of four high rating wind turbines each one uses double fed induction generator (DFIG). Two back to back bidirectional PWM inverters are used in the rotor circuit of each DFIG to be interfaced with electrical utility. This computer simulation incorporates a flexible independent control for the active and reactive powers by using field oriented control technique. Also it introduces an effective technique to track the maximum power point of the wind energy system by controlling the pitch angle and rotational speed. Active power is controlled through the direct axis current of the rotor side converter in outer control layer. Reactive power is controlled by the quadrature axis of the rotor side converter. The dc-link voltage of the PWM converter is maintained constant by controlling the direct axis current of the grid side converter. The system shows a stable operation under different operating conditions. Copyright © 2011 Praise Worthy Prize S.r.l. - All rights reserved. Keywords: DFIG, Induction Generator, Modeling, Wind Energy
Nomenclature
mP Mechanical power from WT ρ Air density (kg/m3) R Radius of the swept area by the blades (m) u Velocity of the wind (m/s)
PC Power coefficient of performance Ω The angular velocity of the shaft (rad/s) λ , β Tip speed ratio and blades pitch angle
nomλ Value of λ at maximum coefficient of performance
s lsR ,L Stator resistance and leakage inductance
r lrR ,L Rotor resistance and leakage inductance
mL Magnetizing inductance
s rL ,L Total stator and rotor inductances
qs qsv ,i q axis stator voltage and current
qr qrv ,i q axis rotor voltage and current
ds dsv ,i d axis stator voltage and current
dr drv ,i d axis rotor voltage and current
qs ds,φ φ Stator q and d axis fluxes
qr dr,φ φ Rotor q and d axis fluxes
mθ , rω Rotor angular position and angular velocity
P Number of pole pairs eω Electrical angular velocity ( P ⋅Ω )
eθ Electrical rotor angular position ( mP θ⋅ )
eT , mT Electromagnetic torque and shaft mechanical torque
J Combined rotor and load inertia coefficient
gP , gQ Active and reactive power from WT *gP , *
gQ Reference values of gP , gQ
sP , sQ Stator active and reactive power
gcP , gcQ Active and reactive power from the GSC to utility
dgci , qgci d and q-axes of current from GSC *dgci , *
qgci Reference value of d and q-axes of current from GSC
*dgci , *
qgci Reference value of d and q-axes of the controlled voltage of GSC
gR , gL Series resistance and inductance of GSC transformer
dcV , *dcV Actual and refererence dc-link voltages
msi Stator magnetizing-current space phasor
dqri , dqrv Space phasor components of rotor current and voltage
dqsi , dqsv Space phasor components of stator-current and voltage
sv The modulus of the stator-voltage space phasor
I. Introduction Electrical energy generated from wind increased in the
last decade and it takes a considerable part of the energy of many countries. Before, wind was not reliable energy source as conventional generation stations as steam and gas power plants. With mature technology introduced to wind energy systems, (WES) it behaves like conventional stations. Now, the reactive power from

Ali M. Eltamaly, A. I. Alolah, M. H. Abdel-Rahman
Copyright © 2011 Praise Worthy Prize S.r.l. - All rights reserved International Review on Modelling and Simulations, Vol. 4, N. 2
526
WES can be controlled independent of active power as in conventional power stations.
Two modes of operations can be used in the electrical generation from the wind namely, constant speed constant frequency (CSCF) and variable speed constant frequency (VSCF). VSCF becomes more attractive especially with the modern technology of power electronics and digital control systems because of its higher energy capture, higher stability, decoupling control of active and reactive power, lower mechanical stresses and acoustic noise, and improved power quality. DFIG is the recommended generator in the large size wind turbine, (WT) to achieve all the benefits of the VSCF systems. The stator of DFIG is connected directly to the electric utility and the rotor is connected to electric utility via two back-to-back PWM converters and step-up transformer as shown in Fig. 1. Due to the presence of the converter in the rotor circuit, the rating of this converter is just a fraction of the main power transferred to electric system which is the main advantage of this configuration.
The main objectives of the proposed controller are tracking of maximum power point, (MPP) and providing an independent control of active and reactive powers. Tracking MPP can be achieved by controlling the pitch angles of the WT's blades as an outer control loop to force WT to work around its maximum coefficient of performance (CP). The variation of pitch angle can be achieved by using the aerodynamic characteristics of the WT [1]-[4] or fuzzy controller [5]-[7]. Active power can be controlled in inner loop by controlling iqr while the reactive power is controlled by controlling idr [8], [9]. Modified response is introduced in this paper by using field oriented control (FOC).
The proposed system contains four WTs each derives a DFIG.The system is connected to an electric utility via a step up and two-circuit transmission lines and step up transformers. The proposed FOC technique is aligning the d-axis of the reference frame along the rotor voltage position. In this case, active and reactive powers are controlled by using idr and iqr respectively [10]. The logic used in this strategy is explained in details below.
II. Wind Energy System Model II.1. General Structure of Wind Energy System Model
The simulation model is built depending on speed variation is assumed to be varied faster than usual for the purpose of simulation time. Models of the proposed energy system are shown in Fig. 1. Aerodynamic characteristics of the WT are used to calculate the shaft power and torque of the WT. This torque is fed to DFIG model. The electric utility voltages and currents are fed to active and reactive power calculation model to calculate active and reactive power Pg and Qg output from DFIG.Reactive power Qg is compared with the reference value, Q*g that required by the system operator from the WES.
gcdI _
gcqI _
dsV
qsV*dsV
*qsV
gcabcI _
abcsV
drI
qrIabcrI
drV
qrVabcrV
ugdI _
ugqI _
ugabcI _
ee θω ,
fabcsV
rθ
re θθ −
Ω
*T
dqabc
*drV
*qrV
dqabc
*drI*
qrI
gcdI _
gcqI _
*Q
Q
*qrI
*dcVdcV
LossP
P*P
dqsV
dqsIsφ
sm LL /
*drI
dqabc
dqabc
dqabc
dqabc
dqabc
P
dcV
dtd /
Ω
mT
Fig. 1. Schematic diagram of the proposed converter The error signal is fed to PI-controller to generate i*
qr. Rotational speed is fed to the aerodynamic model to determine the torque command depending on the aerodynamic characteristics of the WT. Torque command are fed to torque regulator model to determine the reference value of the direct axis current of the rotor side converter (RSC), i*
dr. The reference values of direct and quadrature axis of rotor current are fed to the current regulator of RSC to determine the reference value of the direct and quadrature reference values of RSC, v*
dr, and v*
qr respectively. Space vector modulation (SVM) model uses v*
dr, and v*qr to generate the suitable switching
pattern for the RSC. The grid side controller controls the DC-link voltage, Vdc by comparing the actual value of Vdc with its reference value and the error signal is used to generate i*
ds. Also i*qs can be generated from comparing
the grid reactive power Qg with its corresponding reference value to improve the tracking of the reactive power control.
The pitch angle controller compares the rotational speed with the rated speed and feeds the error signal to PI-controller to determine the value of β which is required to the WT model. A detailed representation of each part is shown in the following sections.
II.2. Aerodynamic Model of Wind Turbine
Mechanical power generated by WT is given by [1]:
2 30 5m PP . C R uρπ= ⋅ (1)
Ali M. Eltamaly, A. I. Alolah, M. H. Abdel-Rahman
Copyright © 2011 Praise Worthy Prize S.r.l. - All rights reserved International Review on Modelling and Simulations, Vol. 4, N. 2
527
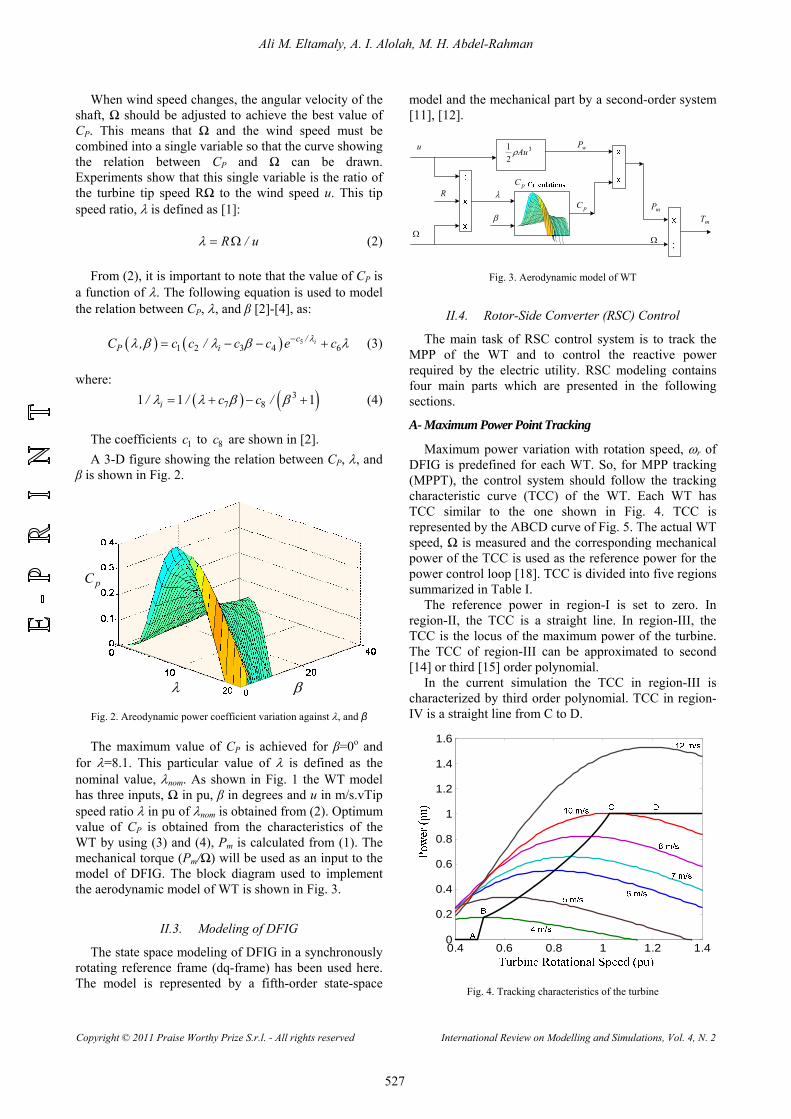
When wind speed changes, the angular velocity of the shaft, Ω should be adjusted to achieve the best value of CP. This means that Ω and the wind speed must be combined into a single variable so that the curve showing the relation between CP and Ω can be drawn. Experiments show that this single variable is the ratio of the turbine tip speed RΩ to the wind speed u. This tip speed ratio, λ is defined as [1]:
R / uλ = Ω (2)
From (2), it is important to note that the value of CP is a function of λ. The following equation is used to model the relation between CP, λ, and β [2]-[4], as:
( ) ( ) 51 2 3 4 6
ic /P iC , c c / c c e cλλ β λ β λ−= − − + (3)
where:
( ) ( )37 81 1 1i/ / c c /λ λ β β= + − + (4)
The coefficients 1c to 8c are shown in [2]. A 3-D figure showing the relation between CP, λ, and
β is shown in Fig. 2.
pC
λ β
Fig. 2. Areodynamic power coefficient variation against λ, and β The maximum value of CP is achieved for β=0o and
for λ=8.1. This particular value of λ is defined as the nominal value, λnom. As shown in Fig. 1 the WT model has three inputs, Ω in pu, β in degrees and u in m/s.vTip speed ratio λ in pu of λnom is obtained from (2). Optimum value of CP is obtained from the characteristics of the WT by using (3) and (4), Pm is calculated from (1). The mechanical torque (Pm/Ω) will be used as an input to the model of DFIG. The block diagram used to implement the aerodynamic model of WT is shown in Fig. 3.
II.3. Modeling of DFIG
The state space modeling of DFIG in a synchronously rotating reference frame (dq-frame) has been used here. The model is represented by a fifth-order state-space
model and the mechanical part by a second-order system [11], [12].
u
Ω
R
β
λpC
3
21 Auρ
mP
wP
Ω
mT
pC
Fig. 3. Aerodynamic model of WT
II.4. Rotor-Side Converter (RSC) Control
The main task of RSC control system is to track the MPP of the WT and to control the reactive power required by the electric utility. RSC modeling contains four main parts which are presented in the following sections.
A- Maximum Power Point Tracking
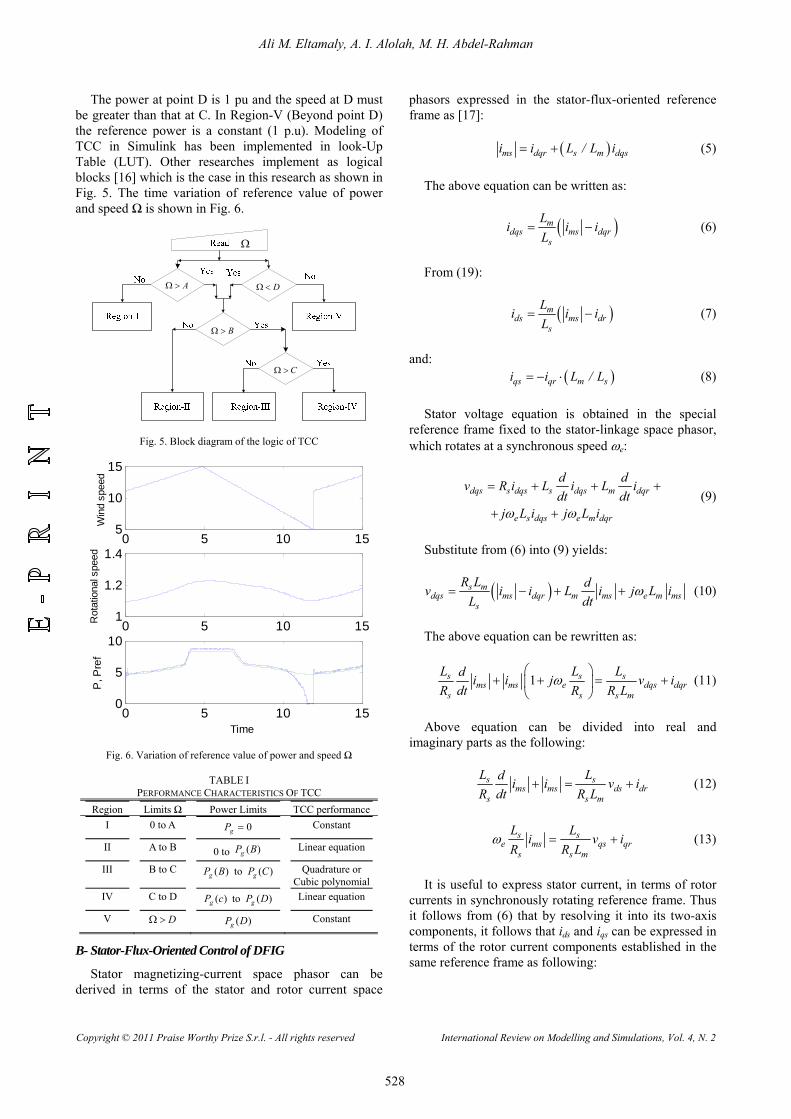
Maximum power variation with rotation speed, ωr of DFIG is predefined for each WT. So, for MPP tracking (MPPT), the control system should follow the tracking characteristic curve (TCC) of the WT. Each WT has TCC similar to the one shown in Fig. 4. TCC is represented by the ABCD curve of Fig. 5. The actual WT speed, Ω is measured and the corresponding mechanical power of the TCC is used as the reference power for the power control loop [18]. TCC is divided into five regions summarized in Table I.
The reference power in region-I is set to zero. In region-II, the TCC is a straight line. In region-III, the TCC is the locus of the maximum power of the turbine. The TCC of region-III can be approximated to second [14] or third [15] order polynomial.
In the current simulation the TCC in region-III is characterized by third order polynomial. TCC in region-IV is a straight line from C to D.
0.4 0.6 0.8 1 1.2 1.40
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Fig. 4. Tracking characteristics of the turbine
Ali M. Eltamaly, A. I. Alolah, M. H. Abdel-Rahman
Copyright © 2011 Praise Worthy Prize S.r.l. - All rights reserved International Review on Modelling and Simulations, Vol. 4, N. 2
528
The power at point D is 1 pu and the speed at D must be greater than that at C. In Region-V (Beyond point D) the reference power is a constant (1 p.u). Modeling of TCC in Simulink has been implemented in look-Up Table (LUT). Other researches implement as logical blocks [16] which is the case in this research as shown in Fig. 5. The time variation of reference value of power and speed Ω is shown in Fig. 6.
Ω
A>Ω D<Ω
B>Ω
C>Ω
Fig. 5. Block diagram of the logic of TCC
0 5 10 155
10
15
Win
d sp
eed
0 5 10 151
1.2
1.4
Rot
atio
nal s
peed
0 5 10 150
5
10
Time
P, P
ref
Fig. 6. Variation of reference value of power and speed Ω
TABLE I PERFORMANCE CHARACTERISTICS OF TCC
Region Limits Ω Power Limits TCC performance I 0 to A 0=gP Constant
II A to B 0 to )(BPg Linear equation
III B to C )(BPg to )(CPg Quadrature or Cubic polynomial
IV C to D )(cPg to )(DPg Linear equation
V D>Ω )(DPg Constant
B- Stator-Flux-Oriented Control of DFIG
Stator magnetizing-current space phasor can be derived in terms of the stator and rotor current space
phasors expressed in the stator-flux-oriented reference frame as [17]:
( )ms dqr s m dqsi i L / L i= + (5)
The above equation can be written as:
( )m
dqs ms dqrs
Li i i
L= − (6)
From (19):
( )m
ds ms drs
Li i i
L= − (7)
and:
( )qs qr m si i L / L= − ⋅ (8)
Stator voltage equation is obtained in the special
reference frame fixed to the stator-linkage space phasor, which rotates at a synchronous speed ωe:
dqs s dqs s dqs m dqr
e s dqs e m dqr
d dv R i L i L idt dt
j L i j L iω ω
= + + +
+ + (9)
Substitute from (6) into (9) yields:
( )s mdqs ms dqr m ms e m ms
s
R L dv i i L i j L iL dt
ω= − + + (10)
The above equation can be rewritten as:
1s s s
ms ms e dqs dqrs s s m
L L Ld i i j v iR dt R R L
ω⎛ ⎞
+ + = +⎜ ⎟⎝ ⎠
(11)
Above equation can be divided into real and
imaginary parts as the following:
s s
ms ms ds drs s m
L Ld i i v iR dt R L
+ = + (12)
s s
e ms qs qrs s m
L Li v i
R R Lω = + (13)
It is useful to express stator current, in terms of rotor
currents in synchronously rotating reference frame. Thus it follows from (6) that by resolving it into its two-axis components, it follows that ids and iqs can be expressed in terms of the rotor current components established in the same reference frame as following:

Ali M. Eltamaly, A. I. Alolah, M. H. Abdel-Rahman
Copyright © 2011 Praise Worthy Prize S.r.l. - All rights reserved International Review on Modelling and Simulations, Vol. 4, N. 2
529
m
qs qrs
Li i
L= − (14)
and:
( )m
ds ms drs
Li i i
L= − (15)
It follows from (14) that iqr is proportional to the
torque-producing (active) stator current component (iqs). However, in (15) stator magnetizing-current space phasor is also present, and this depends on the stator voltage.
This dependency can now be obtained. For this purpose, it is assumed that the stator resistance Rs of the induction machine is neglected. Also, in the steady state the modulus of the stator magnetizing current (which is defined in (15)), is constant ( msi =constant). Thus, it follows from (10) that:
s e m msv L iω= (16) or:
sms
e m
vi
Lω= (17)
From (15) and (17), ids is as following:
1 sds m dr
s e
vi L i
L ω⎛ ⎞
= −⎜ ⎟⎝ ⎠
(18)
The stator active power can be defined as [17]:
( )3
2s ds ds qs qsP v i v i= + (19)
The stator reactive power as:
( )3
2s qs ds ds qsQ v i v i= − (20)
and, the angle is:
1e e
vdt tan
vβ
αθ ω −= =∫
By aligning the d-axis of the reference frame along with the grid voltage position vqs=0 and vqs= constant because the grid voltage is assumed to be constant. Thin the active and reactive power can be obtained from the following equations:
32s ds dsP v i= (21)
32s ds qsQ v i= − (22)
Substitute from (14) and (15) into (21) and (22)
yields:
( )3
2m
s ds ms drs
LP v i i
L= − (23)
32
ms ds qr
s
LQ v i
L= (24)
From (23) and (24) and since the machine parameters
(Lm, Ls) and also |vs| and |ims| are constant, it follows that, the active stator power Ps can be controlled by idr and the reactive stator power Qs can be controlled by iqr.
C- Torque regulator
The relation between torque, stator flux and rotor current is obtained from the following equation:
( )m
e qs dr ds qrs
LT i i
Lφ φ= − (25)
By aligning the d-axis of the reference frame along
with the grid voltage position 0qsv = , then 0dsφ = .
Substituting 0dsφ = in the torque equation, yields:
( )
( )( )ore m s qs dr
*dr e m s qs
T L / L i
i T / L / L
φ
φ
= ⋅
= (26)
The value of qsφ can be obtained from [11], [12] as:
( ) ( )qs ds s ds ev R i /φ ω= − − (27)
So by using the reference value of the generated
torque, the reference value of direct axis rotor current can be obtained from equations (26) and Fig. 7.
D- Reactive Power Regulator
Equation (24) shows a direct relationship between Qs and iqr. So, i*
qr can be used to produce the reactive power required by the system operator. The value of i*
qr can be obtained from comparing the actual and reference values of reactive power and feeding the error signal to PI-controller. The reference values of the RSC voltages is obtained from i*
dr and i*qr in the current regulator of RSC
as shown in Fig. 8.
II.5. Grid-Side Converter Control
The main function of the GSC is to control Vdc and to control active and reactive power from Vdc to the gird side.

Ali M. Eltamaly, A. I. Alolah, M. H. Abdel-Rahman
Copyright © 2011 Praise Worthy Prize S.r.l. - All rights reserved International Review on Modelling and Simulations, Vol. 4, N. 2
530
The value of Vdc is controlled by vector control scheme with the reference frame oriented along the grid voltage vector position [12].
This scheme permits independent control of Vdc and reactive power. The active and reactive power from GSC to electric utility is obtained from the following equations:
( ) ( )3 2gc ds dgc qs qgcP / v i v i= ⋅ + (28)
( ) ( )3 2gc qs dgc ds qgcQ / v i v i= ⋅ − (29)
Substituting for Vqs in (28) and (29) yields:
( ) ( )3 2gc ds dgcP / v i= ⋅ (30)
and:
( ) ( )3 2gc ds qgcQ / v i= − ⋅ (31)
It is clear from (30), (31), that the active and reactive
powers can be controlled independently by idgc and iqgc respectively. The control of Vdc is obtained by double closed loop technique [12], [18]-[20]. The voltage at the leg of the GSC is obtained from the following equation:
agc agc agcas
bgc bs g bgc g bgc
cscgc cgc cgc
v i ivdv v R i L idt
vv i i
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥= − −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(32)
Using Park's transformations, yields:
dgc qgcdse g
qsqgc dgc
dgc dgcg g
qgc qgc
v ivL
vv i
i idR Li idt
ω−⎡ ⎤ ⎡ ⎤⎡ ⎤
= + +⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦ ⎣ ⎦
− −⎡ ⎤ ⎡ ⎤− −⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
(33)
The cross coupling effect is represented by e g dgcL iω
and e g qgcL iω . The voltages v*dgc and v*
qgc that obtained
from (33) are fed to space vector modulation (SVM) module.
dsV
dsI
sR
eω
qsφ
sm LL /
*eT
*drI
Fig. 7. Torque regulator
qri
drirR
mlr LL +*drV
*qrV
*qrI
qsI
*drI
drI
re ωω −
mL
qrI
mL
dsI
re ωω −
mlr LL +
re ωω −
re ωω −
Fig. 8. Current Regulator at rotor converter side
III. Simulation Results Simulation has been carried out by using Simulink
with Matlab. The system consists of four WT with rating of 2 MW which are connected to the electric utility via step-up tansformer, 20km transmission line, and step-down transformer. The system contains 500kW local load. The speed variation and the required reactive power are changed in stiff way to see the response of the control system during these conditions. Fig. 9 shows the time variation of wind speed (m/s), rotational speed (pu), bitch angle, tip speed ratio, and output power. It is clear from this Fig. that the pitch angle is set to zero when the rotational speed less than the rated value (The value at point D of Fig. 4). It is also notable that when the output power exceeds the rated value the aerodynamic system increases the pitch angle to reduce the output power to the rated value. Fig. 10 shows the time variation of Qg and Q*
g , iqr, i*
qr, idr, i*dr, Vdc, and idgc, i*
dgc. It is clear from the first curve (top one) that the system follows the reactive power required from the system even with highly change in the reactive power. Also it is clear from the second curve of Fig. 10 that i*
qr increase in negative direction with increasing the reactive power required and vice versa. Also it is clear from this Fig. that iqr follows exactly its reference value i*
qr. It is also clear from the third curve of Fig. 10 that the power going to electric utility follows the reference or calculated value. Also it is clear from fourth curve of Fig. 10 that idr follows exactly its reference value i*
dr. It is also clear from the fifth curve of Fig. 10 that Vdc is almost constant even in sever conditions. The last curve shows that idgc follows exactly its reference value, i*
dgc.

Ali M. Eltamaly, A. I. Alolah, M. H. Abdel-Rahman
Copyright © 2011 Praise Worthy Prize S.r.l. - All rights reserved International Review on Modelling and Simulations, Vol. 4, N. 2
531
0 5 10 155
10
15u(
m/s
)
0 5 10 151.1
1.151.2
wr(p
u)
0 5 10 150
5
Bet
a
0 5 10 155
10
15
Lam
da
0 5 10 150
5
10
Pg,P
* g
Fig. 9. Time variation of wind speed (m/s), rotational speed (pu), bitch angle, tip speed ratio, and output power
0 5 10 150
5
Qg,Q
* g
0 5 10 15-1
-0.50
i qr,i*
qr
0 5 10 1505
10
Pg,P
* g
0 5 10 150
0.5
i dr,i*
dr
0 5 10 15118012001220
Vdc
0 5 10 15-0.2-0.1
00.1
Time
i dgc,i*
dgc
Fig. 10. Time variation of gQ , *gQ (MVAR), qri , *
qri , gP , *gP ,
dri , *dri , dcV , and dgci , *
dgci
IV. Conclusion This paper presents in details a complete simulation
for interconnecting WT having DFIG with electric utility. The control technique permits a maximum power
point tracking for the available energy from the wind independent of the control of the required reactive power from the wind energy system. The maximum power point tracker uses inner loop to control the blades pitch angle and outer loop uses vector control technique by controlling the d-axis of the rotor current. The reactive power has been controlled effectively using the q-axis of the rotor current. The grid-side converter is controlled with a vector control strategy with the grid voltage orientation. The d-axis voltage component is fixed with the orientation of grid voltage space vector, and the q-axis voltage component is zero. So the active power and reactive power of the grid-side converter can be controlled independently using d and q-axes of grid side converter current respectively. Simulation results show the effective behavior and the superiority of the control system even with sudden change in the wind speed or sudden change in the required reactive power.
References [1] Ali M. Eltamaly, Modeling of Wind Turbine Driving Permanent
Magnet Generator with Maximum Power Point Tracking System, Journal of King Saud University, Vol. 19 (issue 2), pp.223-228, , 200.
[2] S. Heier, Grid Integration of Wind Energy Conversion Systems, John Wiley & Sons Ltd, 2nd Edition, ISBN 0470868996, 2006.
[3] A.A. El-Sattar, N.H. Saad, M.Z. Shams El-Dein, Dynamic response of doubly fed induction generator variable speed wind turbine under fault, Electric Power Systems Research, Vol. 78, pp.1240–1246, 2008.
[4] L. Krichen, B. François and A. Ouali, A fuzzy logic supervisor for active and reactive power control of a fixed speed wind energy conversion system, Electric Power Systems Research, Vol.78, pp.418–424, 2008.
[5] Qichang Duan, Fengxia Hao, Shicheng Feng, Adaptive Fuzzy Control Used in DFIG VSCF Wind Power Generator System, in Proc. Conf.,2008, Proc. of the 7th World Congress on Intelligent Control and Automation, China, 2008, pp. 29-32.
[6] Le-Ren Chang-Chien, Chih-Min Hung, Yao-Ching Yin, Dynamic Reserve Allocation for System Contingency by DFIG Wind Farms", IEEE Trans. on Power Systems, Vol. 23, No. 2, 729-736, May 2008.
[7] V. Calderaro, V. Galdi, A. Piccolo, P. Sian, A fuzzy controller for maximum energy extraction from variable speed wind power generation systems, Electric Power Systems Research, Vol. 78, pp.1109–1118, , 2008.
[8] D. Aouzellag, K. Ghedamsi and E.M. Berkouk,"Network power flux control of a wind generator, Renewable Energy, Vol. 34, pp. 615–622, March 2009.
[9] X. Yu, Z. Jiang, and Y. Zhan, A Synergetic Control Approach to Grid-Connected, Wind-Turbine Doubly-Fed Induction Generators, in Conf. Proc., PESC, 2008, pp.2070 – 2076.
[10] K. Gogas, G. Joos, B. T. Ooi, Y. Z. Zhang, B. Mwinyiwiwa, Design of a Robust Speed and Position Sensorless Decoupled P-Q Controlled Doubly-Fed Induction Generator for Variable-Speed Wind Energy Applications, in conf. proc.,2007, EPC 2007, Canada, pp. 62 – 67.
[11] P. C. Krause, O. Wasynczuk, and S.D. Sudhoff, Analysis of Electric Machinery, book, IEEE Press, 2002.
[12] R. Pena, J. C. Clare, and G. M. Asher, A doubly fed induction generator using back-to-back PWM converters and its application to variable- speed wind-energy generation, Proc. IEE Trans., Vol. 143, No. 5, pp. 231–241, 1996.
[13] P.V. Kumar, S. K. Kottayil, K.S. Meera, Transient Fault Response of Grid Connected Wind Electric Generators, in Conf. Proc., 2006, PEDES 2006, pp. 1 – 6.

Ali M. Eltamaly, A. I. Alolah, M. H. Abdel-Rahman
Copyright © 2011 Praise Worthy Prize S.r.l. - All rights reserved International Review on Modelling and Simulations, Vol. 4, N. 2
532
[14] G. Ramtharan, J. B. Ekanayake, and N. Jenkins, Support for Spinning Reserve from DFIG based wind turbines, in Conf. proc., ICIIS 2007, Sri Lanka, pp.111-115.
[15] A. Yazdani, Islanded Operation of A Doubly-Fed Induction Generator (DFIG) Wind-Power System with Integrated Energy Storage, in Conf. Proc. EPC 2007. Canada, 2007 pp. 153 – 159.
[16] N. Strachan and D. Jovcic, Dynamic Modelling, Simulation and Analysis of an Offshore Variable-Speed Directly-Driven Permanent-Magnet Wind Energy Conversion and Storage System (WECSS), in Conf. Proc. OCEANS 2007 – Europe, 2007, pp.1-6.
[17] P. Vas, Sensorless Vector and Direct Torque Control, Oxford science publications, ISBN: 13- 9780198564652, 1998.
[18] M. Fazli R. Jahani, Ali Fazli, J. Olamaei, H. A. Shayanfar, New Method to Connect Wind Turbines Equipped With DFIGs to the Power Grid Using FCL and STATCOM, International Review on Modeling and simulation Journal, IREMOS, vol. 3, (issue 4), pp. 598-603, Aug. 2010.
[19] B. Vahidi, H. Yazdanpanahi, The Effect of Wind Farm to AC Grid Connection Type on Overvoltages Due to Lightning, International Review on Modeling and simulation Journal, IREMOS, vol. 2, (issue 5), pp. 598-603, Oct.. 2009.
[20] S. V. Heidari, M. Sedighizadeh, A. Rezazadeh, M. Ahmadzadeh, Lyapunov Based Self-tuning Control of Wind Energy Conversion System, International Review on Modeling and simulation Journal, IREMOS, vol. 3, (issue 5), (part A), pp. 864-869, Oct. 2010.
Authors’ information 1Electrical Engineering Department, King Saud University. 2Electrical Engineering Dept., Mansoura University, Egypt.
Dr. Ali M. Eltamaly was born on June, 1969, Egypt. He received the B. S. (with distinction and honor degree), M.Sc., and PhD from Texas A&M University-USA, in 1992, 1996, and 2000, respectively. He joined Elmina University, Egypt, from 1992-1997. He joined electrical engineering dept., Texas A&M university, USA from 1997-2000. He was a member of the
faculty of the college of engineering, Elminia and Elmansoura universities, Egypt from 2000 to 2005. He is currently an associate Professor of the college of engineering of King Saud University, Saudi Arabia since Oct. 2005 till now. Currently Dr. Eltamaly is a Wind Energy Section Supervisor of Sustainable Energy Technology program of King Saud University. Dr. Eltamaly research interests are in the area of renewable energy, power electronics, and power quality where he supervised a number of MS.c and PhD thesis and published about 50 papers in international journals and conferences, number of books and book chapters for famous publishers, and number of national and international technical projects. Dr. Eltamaly conducts several courses and workshops in the area of renewable energy and power quality.
A. I. Alolah (S'85,AM'86,M'87,SM'96) was born in 1957. He received a B.Sc. in EE dept., King Saud University, Riyadh, Saudi Arabia in 1979 and Ph.D. in EE dept., University of Bradford, England in 1986. In May 86 Dr. Alolah joined King Saud University as an Assistant professor. He was promoted to an Associate professor and then to a Professor in
May 90 and Nov. 94, respectively. He is the chairman of EE dept., King Saud University. His current research interest includes electrical machines and power electronics.
Mansour Hassan Abdel-Rahman was born in Egypt in 1947. He received the B.Sc. and M.Sc. degrees in electrical engineering from Cairo University in 1970 and 1975, respectively, and the Ph.D. degree in electrical engineering from the University of Manchester Institute of Science and Technology (UMIST), U.K., in 1979. He has been a Full Professor at the University of El-
Mansoura, Egypt, since 1987. He spent visiting assignments, teaching and researching, at the University of Toronto, and, University of Windsor, Canada, the University of Cambridge, U.K., where he was a Fellow of Churchill College, University of Western Australia, Australia, University of Canterbury, New Zealand, Doshisha University, Japan, University of Iceland, Iceland, , The School of Renewable Energy Science (RES), Iceland, Helsinki University of Technology, Finland, University of Aalborg, Denmark, Jordan University, Jordan, and Kuwait University, Kuwait. Dr. Abdel-Rahman received the John Madsen Medal for the best paper submitted to the Institute of Engineers, Australia, in 1989, and three awards from the IEEE for the best paper in 1987 and 1988, respectively.

International Review on Modelling and Simulations (IREMOS)
(continued from outside front cover)
A Comparative Study on Optimal Design of LLC Resonant Converter by Intelligent Optimization Techniquesby K. S. Rama Rao, Nur Syahirah Mohd Azhar, Nor Hisham Hamid
547
Losses Minimization in DTC-DPWM Induction Motor Drives by H. Kraiem, M. Dhaoui, L. Sbita
555
Doubly Fed Induction Generator Based a Novel Nine-Switch AC/AC Converter by Mohamad Reza Banaei, Ali Reza Dehghanzadeh
562
Suppression Chaotic Overvoltages in Potential Transformer Including Nonlinear Core Losses Considering Neutral Earth Resistance by Hamid Radmanesh, Roozbeh Kamali, Negar Farmani
568
Direct Torque Controlled Induction Motor Drives Using Space Vector Based PWM Techniques for Reduced Common Mode Voltage by V. Anantha Lakshmi, T. Bramhananda Reddy, M. Surya Kalavathi, V. C. Veera Reddy
575
Electromagnetic Analysis of the Effects of Static Eccentricity Fault on the Radial Force Variations in Switched Reluctance Motors by H. Torkaman, M. S. Toulabi, E. Afjei
585
Reduced Common Mode Voltage PWM Algorithms for Vector Controlled Induction Motor Drives by K. Satyanarayana, T. Brahmananda Reddy, J. Amarnath, A. Kailasa Rao
591
Sympathetic Inrush Phenomenon Analysis and Solution for a Power Transformer by Abdullah Asuhaimi Mohd Zin, Hana Abdull Halim, Sazali P. Abdul Karim
601
Low-Impedance Restricted Earth Fault Numerical Algorithms Operation in Power-Transformer Protection by B. Nim Taj, A. Mahmoudi, S. Kahourzade
608
A Series DC Motor Time-Varying Observer Based on Flatness and Genetic Algorithm by A. Mansour, H. Jerbi, N. Benhadj Braiek
616
TORUS and AFIR Axial-Flux Permanent-Magnet Machines: a Comparison via Finite Element Analysis by A. Mahmoudi, N. A. Rahim, W. P. Hew
624
Analysis and Robust Controller Design for a Hybrid Electrical Vehicle with PMSM by Ghazanfar Shahgholian, Pegah Shafaghi, Navid Lotfi Zadeh
632
Modelling of an Electro-Hydraulic Forklift in Matlab Simulink by Tatiana A. Minav, Denis M. Filatov, Lasse I. E. Laurila, Juha J. Pyrhönen, Victor B. Vtorov
640
The Use of SOM and MLP Neural Networks in the Classification of Pulse-Echo Ultra-Sonic Signals by A. Karimi, S. Seyedtabaii
648
Effects of Oil Palm Shell Filler on Inception and Propagation of Electrical Treeing in Silicone Rubber Composite Material Under AC Voltage by M. H. Ahmad, H. Ahmad, Y. Z. Arief, R. Kurnianto
653
(continued on outside back cover) Abstracting and Indexing Information:
Academic Search Complete - EBSCO Information Services Cambridge Scientific Abstracts - CSA/CIG Elsevier Bibliographic Database SCOPUS Index Copernicus (Journal Master List): Impact Factor 6.55
Autorizzazione del Tribunale di Napoli n. 78 del 1/10/2008

(continued from inside back cover)
Noise Smoothing for GPS Receivers Positioning Data Using Wavelet Transform by M. R. Mosavi, A. Ayatollahi, I. Emamgholipour
661
Theoretical Aspects Related to Active Force Evaluation in the Case of Electromagnetic Devices by Adrian Pleşca
668
Modeling of Distribution of PD Pulses within Micro-Cavities by Alireza A. Ganjovi, Ghasem Rastpour
674
Analysis Natural Frequencies a Functionally Graded Cylindrical Shell with Effects Symmetrical Boundary Conditions by M. R. Isvandzibaei, M. Setareh
683
A New Module Design for 3D Graphic Transformations Using Generated Floating-Point Core Units by İ. Şahin, İ. Koyuncu
691
Study on Post Arc Current and Transient Recovery Voltage in Vacuum Circuit Breaker by Amir Hayati Soloot, Ahmad Gholami, Kaveh Niayesh
699
Static and Dynamic Behaviors of an Electrostatically Actuated Micro Beam by M. M. S. Fakhrabadi, B. Dadashzadeh, V. Norouzifard, M. Dadashzadeh
710
Modified Spectrum Sensing and Awareness in Wireless Radio Networks by Pouya Derakhshan Barjoei
718
Simulation of High Operating Temperature InSb/In1-xAlxSb Infrared Photodetector by Mohammad Nadimi, Ali Sadr
723
Optimization of Organic Solar Cells Using the New Unified Model of Electric Field at the Active Layer by M. R. Merad Boudia, A. M. Ferouani, A. Cheknane, B. Benyoucef
727
Modeling and Simulation of Discharges Propagating Over Discontinuously Polluted Insulator Surfaces Under Impulse Voltages by A. Beroual, S. Diampeni, N. H. Malik, A. A. Al-Arainy, E. A. Al-Ammar
732
(continued on Part B)
This volume cannot be sold separately by Part B
1974-9821(201104)4:2;1-V