
New Journal of Applied Geophysics - دانشگاه آزاد اسلامی واحد نجف...
7
Random noise attenuation by Wiener-ANFIS filtering Kimiaefar R. a , Siahkoohi H. R. b , Hajian A. c, ⁎, Kalhor A. d a Department of Geophysics, Science and Research Branch, Islamic Azad University, Tehran, Iran b Institute of Geophysics, University of Tehran, Tehran, Iran c Department of Physics, Najafabad Branch, Islamic Azad University, Najafabad, Iran d Faculty of New Sciences and Technologies, University of Tehran, Tehran, Iran abstract article info Article history: Received 13 January 2017 Received in revised form 18 May 2018 Accepted 25 May 2018 Available online 26 May 2018 This paper introduces a method for background random noise attenuation in seismic reflection data giving prior- ity to the preservation of coherent seismic events and automation of the algorithm. Since the statistical charac- teristics of random noise are different than those of coherent events, in the proposed method, after calculating Adaptive Wiener Filter (AWF), with different window sizes, the structure of the input data ware calculated by Fuzzy C-Mean Clustering (FCM). The sorted standard deviation of AWF values ware also used to determine the input data for training of Adaptive Neuro-Fuzzy Inference System (ANFIS). Trained network was generalized to all input data points and the output of ANFIS, alongside with data structure ware used to determine the optimized output by comparing noise level of all outputs. The proposed method was applied on both synthetic and real data sets and the results were compared to those of the conventional methods. The research findings revealed that the method was of a considerably higher performance in random noise attenuation as well as preserving the coher- ent events. © 2018 Published by Elsevier B.V. Keywords: Random noise attenuation ANFIS Adaptive Wiener filtering Fuzzy C-Mean Clustering 1. Introduction Noise is an inevitable phenomenon in seismic data acquisition, and affects seismic data processing and interpretation depending on its type and amount. On the other hand, the resolution (continuity of seismic events) of seismic sections is inversely proportional to the amount of the background random noise (Sheriff, 1997). Even though it is expected that random noise decreases dramatically by the increasing of stack fold, we will observe the impact of random noise at far offsets and later arrivals especially in relatively deep ac- quisitions (Broadhead, 2008). Based on the characteristics of the seismic events and the amount of the existing random noise, by in- corporating certain prior information, a supervising expert can at- tenuate random noise using conventional methods such as band pass filtering (Nikolic, 1975; Stein and Bartley, 1983), Karhunen- Loeve filtering (Al-Yahya, 1991), median filtering (Liu et al., 2006; Liu, 2013), methods based on f-x deconvolution (Kaboodin and Javaherian, 2010), Fourier and Radon transforms, time-frequency analysis including multi resolution (Nikolic, 1975) and peak filtering methods (Lin et al., 2014; Neelamani et al., 2008). Soft computing has become popular in the past decades in geophys- ical studies (Aminzadeh and Groot, 2004; Baan and Jutten, 2000; Hajian et al., 2012). However, except in the interpretation and classification of seismic attributes, it seems that soft computations and artificial intelli- gence are not widely used in seismic data processing. Zhang et al. (Zhang et al., 2010) used a neural network with a modified version of back propagation architecture in which the error function had been al- tered so as to attenuate the random noise in a shot record. Djarfour et al. (Djarfour et al., 2008) attenuated the noise in synthetic and real shot re- cords using neural network. Lin et al. (Lin et al., 2014) applied fuzzy clustering along with their main algorithm, which was based on time- frequency peak filtering, to attenuate random noise. Recently, Kimiaefar et al. (Kimiaefar et al., 2016), proposing a semi-automatic algorithm, de- ployed Artificial Neural Network (ANN) along with wavelet packet anal- ysis for attenuating random noise in synthetic and real stacked gathers and also common offset sorted gathers. This paper intends to enhance the signal to noise ratio of the seismic reflection data by attenuating background random noise and preserving reflection data, utilizing intensive potential of the ANFIS and FCM in model discrimination and local neighborhood information of each sam- ple from adaptive Wiener analysis. Alongside this main purpose, the au- tomation of the procedure is also the focus of attention. 1.1. ANFIS architecture Adaptive Neuro Fuzzy Inference System (ANFIS) is a hybrid learning procedure which constructs an input–output mapping based on fuzzy if–then rules with appropriate member functions to generate the stipu- lated input output pairs (Jang, 1993). In other word, as a neural-fuzzy Journal of Applied Geophysics 159 (2018) 453–459 ⁎ Corresponding author. E-mail address: [email protected] (H. A.). https://doi.org/10.1016/j.jappgeo.2018.05.017 0926-9851/© 2018 Published by Elsevier B.V. Contents lists available at ScienceDirect Journal of Applied Geophysics journal homepage: www.elsevier.com/locate/jappgeo
Transcript of New Journal of Applied Geophysics - دانشگاه آزاد اسلامی واحد نجف...

Journal of Applied Geophysics 159 (2018) 453–459
Contents lists available at ScienceDirect
Journal of Applied Geophysics
j ourna l homepage: www.e lsev ie r .com/ locate / j appgeo
Random noise attenuation by Wiener-ANFIS filtering
Kimiaefar R. a, Siahkoohi H. R. b, Hajian A. c,⁎, Kalhor A. da Department of Geophysics, Science and Research Branch, Islamic Azad University, Tehran, Iranb Institute of Geophysics, University of Tehran, Tehran, Iranc Department of Physics, Najafabad Branch, Islamic Azad University, Najafabad, Irand Faculty of New Sciences and Technologies, University of Tehran, Tehran, Iran
⁎ Corresponding author.E-mail address: [email protected] (H. A.).
https://doi.org/10.1016/j.jappgeo.2018.05.0170926-9851/© 2018 Published by Elsevier B.V.
a b s t r a c t
a r t i c l e i n f oArticle history:Received 13 January 2017Received in revised form 18 May 2018Accepted 25 May 2018Available online 26 May 2018
This paper introduces amethod for background random noise attenuation in seismic reflection data giving prior-ity to the preservation of coherent seismic events and automation of the algorithm. Since the statistical charac-teristics of random noise are different than those of coherent events, in the proposed method, after calculatingAdaptive Wiener Filter (AWF), with different window sizes, the structure of the input data ware calculated byFuzzy C-Mean Clustering (FCM). The sorted standard deviation of AWF values ware also used to determine theinput data for training of Adaptive Neuro-Fuzzy Inference System (ANFIS). Trained network was generalized toall input data points and the output of ANFIS, alongsidewith data structureware used to determine the optimizedoutput by comparing noise level of all outputs. The proposedmethodwas applied on both synthetic and real datasets and the resultswere compared to those of the conventionalmethods. The research findings revealed that themethod was of a considerably higher performance in random noise attenuation as well as preserving the coher-ent events.
© 2018 Published by Elsevier B.V.
Keywords:Random noise attenuationANFISAdaptive Wiener filteringFuzzy C-Mean Clustering
1. Introduction
Noise is an inevitable phenomenon in seismic data acquisition,and affects seismic data processing and interpretation dependingon its type and amount. On the other hand, the resolution (continuityof seismic events) of seismic sections is inversely proportional to theamount of the background random noise (Sheriff, 1997). Eventhough it is expected that random noise decreases dramatically bythe increasing of stack fold, we will observe the impact of randomnoise at far offsets and later arrivals especially in relatively deep ac-quisitions (Broadhead, 2008). Based on the characteristics of theseismic events and the amount of the existing random noise, by in-corporating certain prior information, a supervising expert can at-tenuate random noise using conventional methods such as bandpass filtering (Nikolic, 1975; Stein and Bartley, 1983), Karhunen-Loeve filtering (Al-Yahya, 1991), median filtering (Liu et al., 2006;Liu, 2013), methods based on f-x deconvolution (Kaboodin andJavaherian, 2010), Fourier and Radon transforms, time-frequencyanalysis including multi resolution (Nikolic, 1975) and peak filteringmethods (Lin et al., 2014; Neelamani et al., 2008).
Soft computing has become popular in the past decades in geophys-ical studies (Aminzadeh and Groot, 2004; Baan and Jutten, 2000; Hajianet al., 2012). However, except in the interpretation and classification of
seismic attributes, it seems that soft computations and artificial intelli-gence are not widely used in seismic data processing. Zhang et al.(Zhang et al., 2010) used a neural network with a modified version ofback propagation architecture in which the error function had been al-tered so as to attenuate the randomnoise in a shot record. Djarfour et al.(Djarfour et al., 2008) attenuated the noise in synthetic and real shot re-cords using neural network. Lin et al. (Lin et al., 2014) applied fuzzyclustering along with their main algorithm, which was based on time-frequency peak filtering, to attenuate randomnoise. Recently, Kimiaefaret al. (Kimiaefar et al., 2016), proposing a semi-automatic algorithm, de-ployedArtificialNeuralNetwork (ANN) alongwithwavelet packet anal-ysis for attenuating random noise in synthetic and real stacked gathersand also common offset sorted gathers.
This paper intends to enhance the signal to noise ratio of the seismicreflection data by attenuating background randomnoise andpreservingreflection data, utilizing intensive potential of the ANFIS and FCM inmodel discrimination and local neighborhood information of each sam-ple from adaptiveWiener analysis. Alongside thismain purpose, the au-tomation of the procedure is also the focus of attention.
1.1. ANFIS architecture
Adaptive Neuro Fuzzy Inference System (ANFIS) is a hybrid learningprocedure which constructs an input–output mapping based on fuzzyif–then rules with appropriate member functions to generate the stipu-lated input output pairs (Jang, 1993). In other word, as a neural-fuzzy

Fig. 1. ANFIS structure for two rule based.
Table 1Detailed information about ANFIS network used in the research.
Parameter Value
Initial FIS Grid partition with two membership Functionsmembership function's type Gaussian bell functionTraining epoch number 10 epochsOptimization method Hybrid (least-squares estimation with backpropagation)Initial step size 0.01Step size decrease rate 0.9Step size increase rate 1.1
454 R. Kimiaefar et al. / Journal of Applied Geophysics 159 (2018) 453–459
system, ANFIS combines the learning capabilities of neural networkswith the functionality of Fuzzy Inference System (FIS). To do so, it usesthe hybrid learning algorithm to identify parameters of Sugeno-typeFIS (Takagi and Sugeno, 1985). To achieve the goal, it applies a combina-tion of the least-squares algorithm and the back-propagation gradientdescent method for training FIS membership function parameters toemulate a given training data set. Based on the ANFIS algorithm, a fivelayer fuzzy neural network constructed with, for instance, two rules, isshown in Fig. 1.
Each neuron in layer 1 (L. 1) is adaptive with a parametric activationfunction (Jang, 1993). The output is the grade of membership of thegiven input to each membership function, i.e., μA1(u1), μB1(u2), μA2(u1)or μB2(u2). The membership function could be a bell function as an ex-ample (Jantzen, 1998):
μ xð Þ ¼ 1
1þ x−ca
�� ��2b ð1Þ
where a, b, and c are shaping parameters of the bell function. The nodesin L. 2 are fixed nodes, whose output is the product of all incoming sig-nals. Generally, any other fuzzy “AND” operator can be used. Each nodeoutput represents the firing strength of the ith rule. In L. 3, every node is
Fig. 2. Flowchart of the proposed method 1.
a fixed node which calculates the ratio of the ith rule's firing strengthrelative to the sum of all rule's firing strengths as bellow (Jantzen,1998):
αi ¼ αi
α1 þ α2; i ¼ 1;2 ð2Þ
So, the output is a normalized firing strength. Every node in L. 4 is anadaptive node with a node output given by:
αiyi ¼ αi ci1yi1 þ ci2y2 þ ci0ð Þ; i ¼ 1;2 ð3Þ
where ᾱ is the normalized firing strength from L. 3 and c1, c2 and c3 areparameter sets of this node. Each node in L. 5 is a fixed nodewhich is thesumof all incoming signals. It is straight forward to generalize theANFISarchitecture in Fig. 1 to a rule base with more than two rules. When thepremise parameters are fixed, the overall output is a linear combinationof the consequent parameters. In symbols, the output of L. 5 can bewrit-ten as Eq. 4 that is linear in the resulting parameters cij (Jeng et al.,2009).
y ¼ α1
α1 þ α2y1 þ
α2
α1 þ α2y2
¼ ᾱ1 c11u1 þ c12u2 þ c10ð Þ þᾱ2 c21u1 þ c22u2 þ c20ð Þ
¼ ᾱ1 u1ð Þc11 þ ᾱ1 u2ð Þc12 þᾱ1c10 þ ᾱ2 u2ð Þc21 þ ᾱ2 u2ð Þc22þ ᾱ2c20 ð4Þ
Fig. 3. RMS error, between denoised and original synthetic image, calculated for differentadditive noise and number of clusters.

0 50 100
0
50
100
0 50 100
0
50
100
0 50 100
0
50
100
0 50 100 0 50 100 0 50 100 ( a ) ( b ) ( c )
Fig. 4. Image of a synthetic earth model (a), the noisy version (b) and the structure extracted by FCM clustering.
455R. Kimiaefar et al. / Journal of Applied Geophysics 159 (2018) 453–459
1.2. Adaptive Wiener Filter
The Wiener filter is a linear shift-invariant system which takes anoisy stochastic input and outputs the minimum mean square error(Sun et al., 1991). In fact, it minimizes the least-squares error betweenthe desired and actual outputs. The Adaptive Wiener Filter (AWF) isan optimized version for Wiener filter. The desired filter coefficientsare obtained by solving an equation in matrix form, which is derivedby a least-squares error method (Jeng et al., 2009). For non-stationarysignals, the Wiener filter is not possible to implement because theinput statistics (the autocorrelation function of the input signal andthe cross-correlation function between the input and desired responsesignals) needed to construct the normal equation are unknown. Basedon the concepts proposed by Claerbout (Claerbout, 1976) and Widrow(Widrow, 2005), a solution can be to let the input signal ‘slide’ over a Fi-nite Impulse Response, FIR, digital filter and to later estimate the meansquared error of the error signal. To minimize the mean squared error,one can adjust the coefficients of the FIR filter. The optimal impulse re-sponse of the FIRfilter can thus be determined at any stage, and the out-put would be an AWF. It should be mentioned that, in many cases, themean squared error is not the criterion for judging how close the proc-essed image is to the original.
Many variations of theWiener filter have been introduced. Since sta-tistical characteristics of data and noise may differ considerably from
0 0.5 1 1.5 2
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Number of Points
noitaived dradnatS
Sorted Standard Deviation Values
Fig. 5. Sorted standard deviation values calculated for different AWF values.
one part to another part of the input data, so, it would be reasonableto adopt a space-variant Wiener filter algorithm.
TheWiener filter used here, is proposed by Lim in 1990 (Lim, 1990).First, the local mean, μ, and local variance, σ2, around each point, a(n1,n2), is calculated in an N1 by N2 local neighborhood, ɳ, as (Lim,1990):
μ ¼ 1N2N2
Xn1 ;n2ϵɳ
a n1;n2ð Þ
σ2 ¼ 1N2N2
Xn1 ;n2ϵɳ
a2 n1;n2ð Þ−μ2 ð5Þ
Since the noise variance (ν2 in Eq. (5)) is not usually available, theaverage of all local estimated variances is used and with this estimate,the AWF will be calculated from:
W n1;n2ð Þ ¼ μ þ σ2−ν2
σ2 a n1;n2ð Þ−μð Þ ð6Þ
Fig. 6. a) Noisy version of Fig. 3a with PSNR = 9.8, b), c) and d), respectively, denoisedimages by AWF, FDCTF and WAF (PSNR for denoised Images are shown in the image).

Fig. 7. a) Noisy version of Fig. 3a with PSNR = 5.5, b), c) and d), respectively, denoisedimages by AWF, FDCTF and WAF (PSNR for denoised Images are shown in the image).
456 R. Kimiaefar et al. / Journal of Applied Geophysics 159 (2018) 453–459
Considering low noise level case (i.e. noise variance will besmall), AWF is nearly equivalent to the input value. And for anoise free input, the Eq. (6) become as (Abe and Shimamura,2012):
W n1;n2ð Þ ¼ μ þ σ2
σ2 a n1;n2ð Þ−μð Þ ¼ a n1;n2ð Þ ð7Þ
Eq. (7) confirms that, for noise free points, output of AWF is not de-pendent to window size.
0 50-4
-2
0
2
4
Original
NoisyAWF
0 50-4
-2
0
2
4
edutilpmA
Original
Noisy
FDCTF
0 50-4
-2
0
2
4
Samp
Original
NoisyWAF
MSE b
MSE b
MSE b
Fig. 8. Cross section for Fig. 6 images at 50th Row with MSE calculated
1.3. Fuzzy C-Mean Clustering
As an unsupervised algorithm, Fuzzy clustering is a robustmethod for analysis of data and construction of models, more nat-ural than hard clustering, in almost all problems. Data on theboundaries between several classes are not forced to fully belongto one of the classes, but rather are assigned membership degreesbetween 0 and 1 indicating their partial membership (Suganyaand Shanthi, 2012). The general case of Fuzzy C-Means (FCM) clus-tering was developed by Bezdek (Bezdek, 1981). The FCM employsfuzzy partitioning such that a data point can belong to all groupswith different membership grades. FCM is based on minimizationof the following function (Bezdek, 1981):
Jm ¼XNi¼1
XCj¼1
umij xi–cik k2;1bmb∞ ð8Þ
wherem is any real number N1, uij is the degree of membership of xiin the cluster j, xi is the ith of N-dimensional measured data, cj is theN-dimension center of the cluster. Fuzzy partitioning is carried outthrough an iterative optimization of the objective function shownabove, with the update of membership, uij, and the cluster centers,cj, by:
uij ¼1
PCk¼1
xi−c jk kxi−ckk k
� � 2m−1
ð9Þ
ci ¼PN
i¼1 umij :xiPN
i¼1 umij
ð10Þ
This iteration will stop whenmaxij{|uijk+1 − uijk|} b ε, where ε is a ter-
mination criterion between 0 and 1, and k is the iteration steps. This pro-cedure converges to a local minimum or a saddle point of Jm.
100 150
100 150
100 150
le No.
etween Origanal and FDCTF = 0.198
etween Origanal and WAF = 0.117
etween Origanal and AWF = 0.114
between original (Fig. 4a) and filtered versions at mentioned row.
0 50 100 150-4
-2
0
2
4Original
NoisyAWF
0 50 100 150-4
-2
0
2
4
edutilpmA
Original
Noisy
FDCTF
0 50 100 150-4
-2
0
2
4
Sample No.
Original
NoisyWAF
MSE between Origanal and WAF = 0.361
MSE between Origanal and FDCTF = 0.676
MSE between Origanal and AWF = 0.996
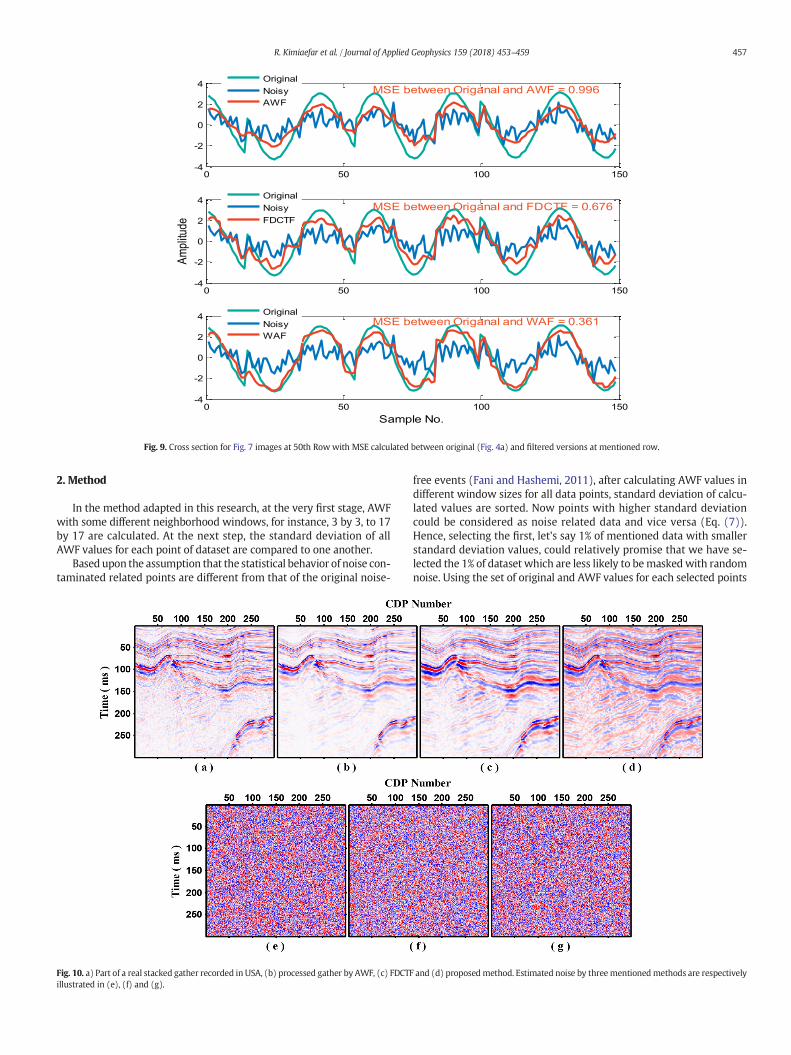
Fig. 9. Cross section for Fig. 7 images at 50th Row with MSE calculated between original (Fig. 4a) and filtered versions at mentioned row.
457R. Kimiaefar et al. / Journal of Applied Geophysics 159 (2018) 453–459
2. Method
In the method adapted in this research, at the very first stage, AWFwith some different neighborhood windows, for instance, 3 by 3, to 17by 17 are calculated. At the next step, the standard deviation of allAWF values for each point of dataset are compared to one another.
Based upon the assumption that the statistical behavior of noise con-taminated related points are different from that of the original noise-
Fig. 10. a) Part of a real stacked gather recorded in USA, (b) processed gather by AWF, (c) FDCTFillustrated in (e), (f) and (g).
free events (Fani and Hashemi, 2011), after calculating AWF values indifferent window sizes for all data points, standard deviation of calcu-lated values are sorted. Now points with higher standard deviationcould be considered as noise related data and vice versa (Eq. (7)).Hence, selecting the first, let's say 1% of mentioned data with smallerstandard deviation values, could relatively promise that we have se-lected the 1% of dataset which are less likely to bemaskedwith randomnoise. Using the set of original and AWF values for each selected points
and (d) proposedmethod. Estimated noise by threementionedmethods are respectively

Fig. 11. (a) Part of a real stacked gather recorded in Australia, (b) processed gather by AWF, (c) FDCTF and (d) proposedmethod. Estimated noise by threementionedmethods are respec-tively illustrated in (e), (f) and (g).
458 R. Kimiaefar et al. / Journal of Applied Geophysics 159 (2018) 453–459
(as ANFIS input data) and a weighted average of mentioned values (asANFIS output), the training pairs for ANFIS networkwill be constructed.The output of this stage will be automatically achieved by generalizingthe trained network to all data.
Beside mentioned usage of AWF values, they will also supply FCMclustering input data. Among different fuzzy clustering methods, FCMwas chosen mainly because of its efficiency and popularity in solvingproblems in various areas (Suganya and Shanthi, 2012). The output ofthis clustering procedure will be used for structure extraction that willbe very useful in especially, denoising data with low signal to noiseratio (SNR). After all, by using the extracted structure, ANFIS output,and noise level estimation measure (Liu et al., 2012), in an iterativeschema, the optimized output or as named here as Wiener-ANFIS Fil-tered (WAF) data, will be determined.
3. Results and discussion
In order to examine the efficiency of the proposedmethod, three dif-ferent datasets were used in all of which our proposed method wascompared with two methods, namely, AWF (Abe and Shimamura,2012) and Fast Discrete Curvelet Transform Filtering (FDCTF) (Zhiyuet al., 2009). It must be mentioned that using these two method wascarried out with the focus on preserving coherent data structure (pre-serving amplitudes related to reflections).
The validation of the results, beside visual comparison, was carriedout through three different methods in synthetic and one method inreal datasets (the methods will be pointed out later).
For Sugeno-type adaptive fuzzy inference system training (ANFIStraining) 5% of each dataset was selected. 80% of the selected portionof the dataset was used for training and the remaining 20% was consid-ered as validation data in ANFIS training procedure. Detailed informa-tion about ANFIS training parameters is shown in Table 1.
As mentioned before, a two-cluster FCM clustering with Gaussianmembership functions was deployed. Consideration of a two-clusterconfiguration in FCM is the result of several experiments in which thestructure of different synthetic input datasets was extracted with ac-ceptable quality in different additive noise levels. The results of
mentioned experiments is illustrated in Fig. 3. In this figure MeanSquare Error between denoised output and the synthetic originalimage is calculated for different levels of noise. As it is depicted, the al-gorithm output error is minimized when the number of clusters is two.
The first dataset is an artificial image for stratified earth model withthree faults (Fig. 4a). As it is shown in Fig. 4b, the original data was con-taminated with random noises. After calculating AWF values, imagestructure was extracted (Fig. 4c) and also ANFIS training performedusing mentioned details. In this stage, Sorted Standard deviation valueswere used for ANFIS input data selection and also determination ofANFIS output values. For this set of data, these values are shown inFig. 5. The light green colored rectangle in this figure is indicating datawhich are assumed to be less noisy (random noise) than the data indi-cated with salmon colored rectangle.
As it could be seen in Fig. 5, two colored regions are marked in thefigure. The light green colored region, is related to the points whichare less contaminated with random noise, as the standard deviation be-tween different AWF values (calculated with different window sizes)for these points is respectively low. For salmon colored region, the op-posite side of the plot, everything is contrariwise.
Performing a more reliable assessment of the proposed method, forthe image demonstrated in Fig. 4a, two different noise levels, were used.In this paper, the noise levels are indicated with Peak Signal to NoiseRatio (PSNR) in dB as:
PSNR ¼ 10� logMax Inputð Þ2
Mean Squared Error refrence; Inputð Þ
!ð11Þ
In Figs. 6 and 7, noisy and filtered versions of Fig. 4a are illustrated.With respect to Fig. 6, the amount of additive noise is higher in Fig. 7.As the first quantitative assessment method, the PSNR of filtered datahas been used here. In Both figs. 6 and 7, the proposed method has in-creased the PSNR of Noisy data higher than AWF and FDCTF.
As the second assessment method, the cross-section of the orig-inal, noisy and filtered images (50th row of mentioned datasets)

459R. Kimiaefar et al. / Journal of Applied Geophysics 159 (2018) 453–459
are compared in Figs. 8 and 9. Mean-Squared Error (MSE) betweenthe 50th row of the filtered and original data has been also calcu-lated and showed in each part of Fig. 8 and Fig. 9. Visual comparisonof plotted cross-sections and also comparing MSE values revealsthat in the data with respectively low amount of random noise(Fig. 6a), in terms of performance, three implemented methodsare acting almost the same, but when higher amount of random ismerged with original data (Fig. 7a), efficiency of the proposedmethod in recovering noisy data is more perceptible, e.g. the MSEvalue of the proposed method is almost half of FDCTF and third ofAWF (Fig. 9).
As, the results of previous experiments on synthetic data, cor-roborated robustness of WAF in random noise attenuation, themethod was performed on two real datasets in the next step. Thefirst real dataset is part of a low fold real post stacked gather (U.S.Geological Survey (USGS) and Coastal and Marine GeologyProgram (CMGP), 2013). As it is illustrated in Fig. 10a, many reflec-tions in all parts of this seismic section have been masked due to thepresence of background random noise and made it difficult to tracethe reflectors continuity. For AWF and FDCTF, attenuating randomnoise in lack of high amplitude data, caused undesired smoothnesson reflection's amplitude (Fig. 10b and c) but in proposed method,the ability of structure extraction, has made it possible to attenuaterandom noise alongside persevering coherency of reflectors andeven improving contrast between them by reinforcement of reflec-tor‘s amplitude (Fig. 10d).
The second real dataset, is relatively a high fold Common DepthPoint (CDP) gather (75 fold) (Maher, 2009). As a results of randomnoise presence, many reflectors could not easily be tracked in the data(Fig. 10a). The filtered data and estimated noise has been illustrated inFig. 11b to g. Once again, comparison of outputs indicates the higher ef-ficiency of the proposed method in attenuating noise and at the sametime preserving the amplitude of the coherent events.
4. Conclusions
As a novel approach, in the method introduced in this paper, theability of soft computing (ANFIS and Fuzzy Clustering) in model dis-crimination and problem solving was used for attenuating randomnoise in seismic datasets. The AWF, calculated with different windowsizes, was employedmainly because of its ability in noise-signal separa-tion, structure extraction and automation of algorithm. Noise level esti-mation measure was also used here for determination of optimizedoutput. The proposed combination ofmentioned approacheswas testedon synthetic data as well as real datasets and the results shows that ourproposed method is of a considerably higher capability in realizing theresearch objectives.
References
Abe, C., Shimamura, T., 2012. Iterative edge-preserving adaptive wiener filter for imagedenoising. Int. J. Comp. Electr. Eng. 4 (4), 503–506.
Al-Yahya, K., 1991. Application of the partial Karhunen - Loeve transform to suppress ran-dom noise in seismic sections. Geophys. Prospect. 39, 77–93.
Aminzadeh, F., Groot, P.D., 2004. Soft computing for qualitative and quantitative seismicobject and reservoir property prediction, part 1. Neural Netw. Appl. 22, 49–54.
Baan, M.V.D., Jutten, C., 2000. Neural networks in geophysical applications. Geophysics 65(4), 1031–1047.
Bezdek, J.C., 1981. Pattern Recognition with Fuzzy Objective Function Algorithms. PlenumPress, New York.
Broadhead, M., 2008. The impact of random noise on seismic wavelet estimation. Lead.Edge 27 (2), 226–230.
Claerbout, J.F., 1976. Fundamentals of Geophysical Data Processing. McGraw-Hill, NY.Djarfour, N., Aifa, T., Baddari, K., Mihoubi, A., Ferahtia, J., 2008. Application of feedback
connection artificial neural network to seismic data filtering. C. R. Geosci. 340,335–344.
Fani, R., Hashemi, H., 2011. Random noise attenuation by application of GK clustering onrelevant seismic attributes. 124th SEG Conference, Tokyo, Japan.
Hajian, A., Zomorrodian, H., Styles, P., 2012. Simultaneous estimation of shape factor anddepth of subsurface cavities from residual gravity anomalies using feed-forward backpropagation neural networks. Acta Geophys. 60 (4), 1043–1075.
Jang, J.S.R., 1993. ANFIS: adaptive-network-based fuzzy inference system. IEEE Trans. Syst.Man Cybern. 23 (3), 665–685.
Jantzen, J., 1998. Neuro Fuzzy Modelling. bfaculty.petra.ac.id/resmana/private/fuzzy/nfmod.pdfN.
Jeng, Y., Li, Y.W., Chen, C.S., Chien, H.Y., 2009. Adaptive filtering of random noise in near-surface seismic and ground-penetrating radar data. J. Appl. Geophys. 68, 36–46.
Kaboodin, A., Javaherian, A., 2010. Random noise reduction by F-X deconvolution. J. Earth5 (1), 61–68.
Kimiaefar, R., Siahkoohi, H.R., Hajian, A.R., Kalhor, A., 2016. Seismic random noise attenu-ation using artificial neural network and wavelet packet analysis. Arab. J. Geosci. 9(3).
Lim, J.S., 1990. Two-Dimensional Signal and Image Processing. Prentice Hall, EnglewoodCliffs, NJ.
Lin, H., Li, Y., Yang, B., Ma, H., Zhang, C., 2014. Seismic random noise elimination by adap-tive time-frequency peak filtering. IEEE Geosci. Remote Sens. Lett. 11 (1), 337–341.
Liu, Y., 2013. Noise reduction by vector median filtering. Geophysics 78 (3), 79–86.Liu, C., Liu, Y., Yang Wang, D., Sun, J., 2006. A 2D multistage median filter to reduce ran-
dom seismic noise. Geophysics 71 (5), 105–110.Liu, X., Tanaka, M., Okutomi, M., 2012. Noise level estimation using weak textured patches
of a single noisy image. 19th IEEE International Conference on Image Processing,pp. 665–668.
Maher, J.L., 2009. L185 Georgetown - Charters Towers deep crustal seismic survey, Qld,2007. Stacked and migrated data and images for line 07GA-GC1 bhttp://www.ga.gov.au/metadata-gateway/metadata/record/69255/N.
Neelamani, R., Baumstein, A.I., Gillard, D.G., Hadidi, M.T., Soroka, W.I., 2008. Coherent andrandom noise attenuation using the curvelet transform. Lead. Edge 27, 240–248.
Nikolic, Z., 1975. A recursive time-varying band-pass filter. Geophysics 40, 520–526.Sheriff, R.E., 1997. Seismic resolution a key element. AAPG Explorer 18 (10), 44–51.Stein, R., Bartley, N., 1983. Continuously time-variable recursive digital band-pass filters
for seismic signal processing. Geophysics 48, 702–712.Suganya, R., Shanthi, R., 2012. Fuzzy C- means algorithm- a review. Int. J. Sci. Res. Publ. 2
(11), 2250–3153.Sun, W.Y., Derenzo, S.E., Budinger, T.F., 1991. An adaptive Wiener filter for PET based on a
novel technique for spectral estimation. IEEE Conference Record of the 1991 IEEE Nu-clear Science Symposium and Medical Imaging Conference - Santa Fe, NM, USA.
Takagi, T., Sugeno, M., 1985. Fuzzy identification of systems and its applications to model-ing and control. IEEE Trans. Syst. Man Cybern. 15, 116–132.
U.S. Geological Survey (USGS) http://www.usgs.gov/, Coastal and Marine Geology Pro-gram (CMGP) bhttp://marine.usgs.gov/N, 20131101, Geophysical data of field activityW-15-76-SC in SAN CLEMENTE 1976 from 01/01/1976 to 01/28/1976: U.S. GeologicalSurvey (USGS) bhttp://www.usgs.govN, Coastal and Marine Geology (CMG) bhttp://walrus.wr.usgs.govN, Menlo Park, CA. (2013).
Widrow, B., 2005. Thinking about thinking: the discovery of the LMS algorithm. IEEE Sig-nal Process. Mag. 22, 100–106.
Zhang, Y., Tian, X., Deng, X., Cao, Y., 2010. Seismic denoising based on modified BP neuralnetwork. Sixth International Conference on Natural Computation. 4, pp. 1825–1829.
Zhiyu, Z., Xiaodan, Z., Jiulong, Z., 2009. SAR Image Processing Based on Fast DiscreteCurvelet Transform, 2009 International Forum on Information Technology and Appli-cations, Chengdu. pp. 28–31.


















