CNES program status CNES program status E. Thouvenot, CNES March 2007.
Upload
duongxuyenCategory
view
220download
0
CNES robotics activities Perception and autonomous navigation for planetary
missions
Michel DELPECH (on behalf of CNES robotics team)
ASTRA 2015 – 11/05/2015 2
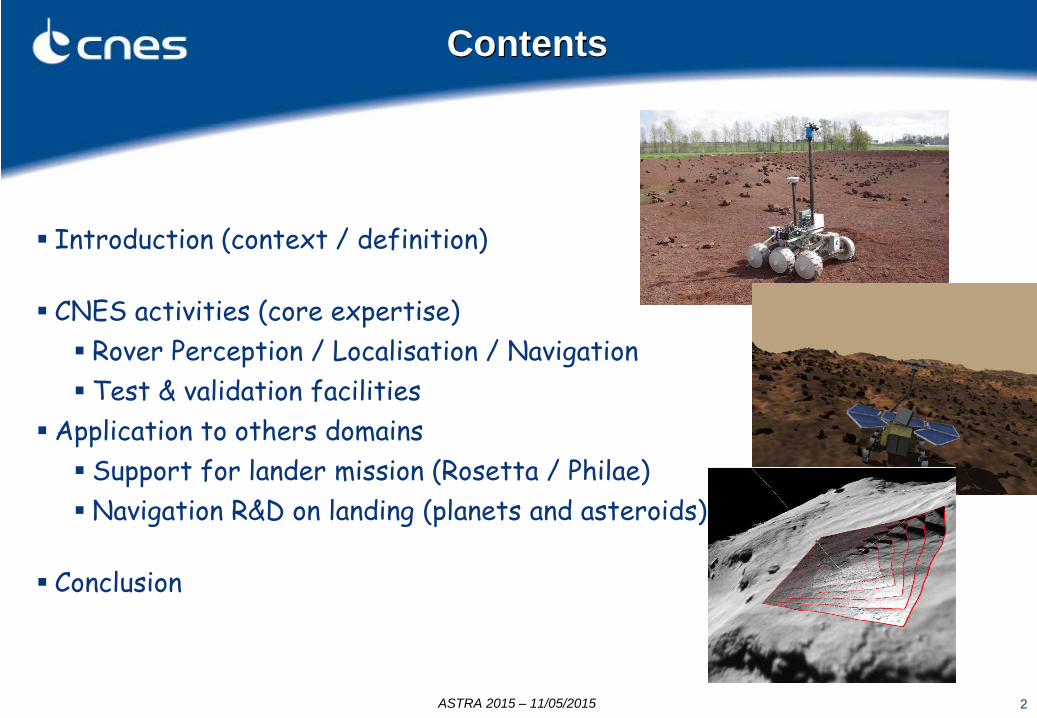
Contents
Introduction (context / definition) CNES activities (core expertise) Rover Perception / Localisation / Navigation Test & validation facilities
Application to others domains Support for lander mission (Rosetta / Philae) Navigation R&D on landing (planets and asteroids)
Conclusion

3
Context
■ Background : 20 years of development in autonomous navigation for planetary exploration rovers - Small team (10 people including students) mainly focused on R&D activities ■ Current work context: Collaboration with ESA for the ExoMars mission Prospective R&D for future missions
■ Objective = extend autonomous navigation capabilities for long range traverses Progress is required in 2 major areas: Functional Layer: Perception / Localization / Path Planning / Path execution Decision Layer: High level planning – Resource monitoring - Recovery if anomaly
CNES focus: extend the capabilities of the Functional layer to limit the assistance of the Decision Layer to “real” anomaly situations
ASTRA 2015 – 11/05/2015

Matching Image acquisition
3D modelling DEM Depth
image Stereo images
Map generation
Path planning
Perception scheduling
Path tracking
Locomotion
Localization
Target
Traject. Nav map
Cmd
Optimized algorithms: ready to fly” at functional level and evaluated on LEON 2 CPU
Dynamics
Robot State
Loc. sensor acquisition
Autonomous Navigation loop
ASTRA 2015 – 11/05/2015
5
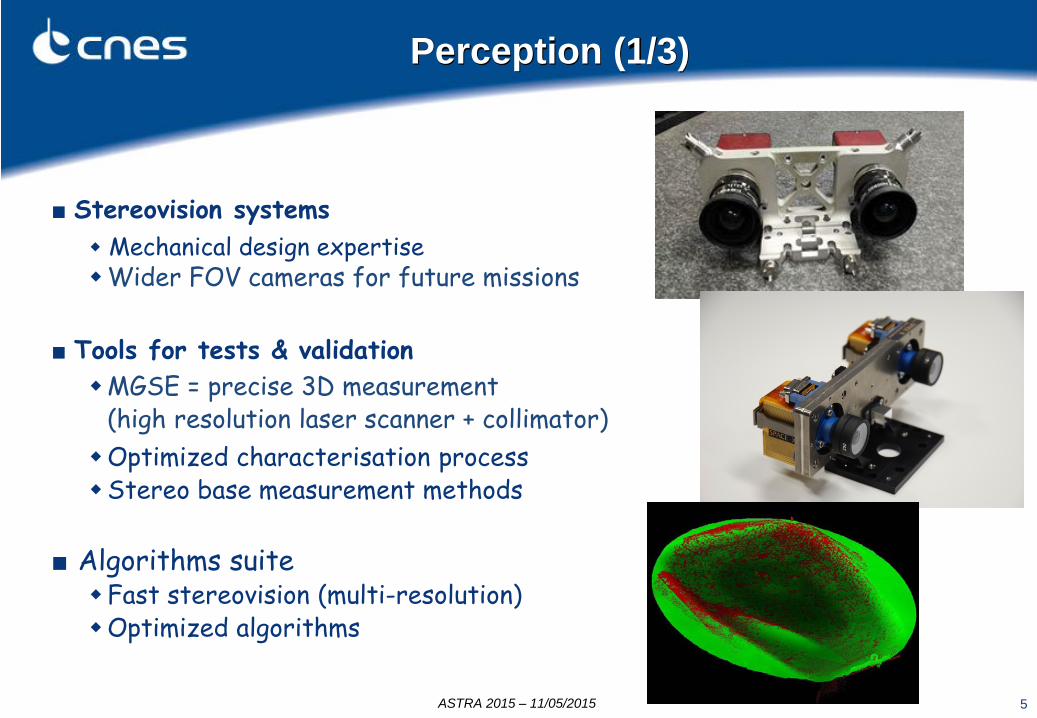
Perception (1/3)
■ Stereovision systems Mechanical design expertise Wider FOV cameras for future missions
■ Tools for tests & validation MGSE = precise 3D measurement
(high resolution laser scanner + collimator) Optimized characterisation process Stereo base measurement methods
■ Algorithms suite Fast stereovision (multi-resolution) Optimized algorithms
ASTRA 2015 – 11/05/2015
6
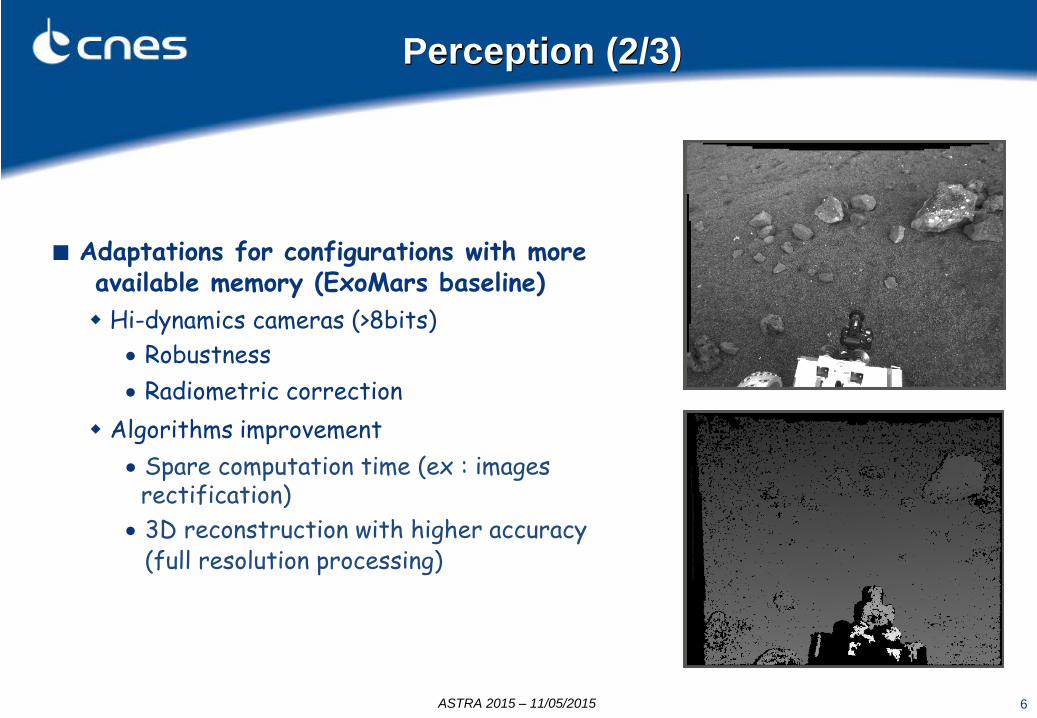
Perception (2/3)
■ Adaptations for configurations with more available memory (ExoMars baseline) Hi-dynamics cameras (>8bits)
• Robustness • Radiometric correction
Algorithms improvement • Spare computation time (ex : images rectification) • 3D reconstruction with higher accuracy
(full resolution processing)
Illustration
ASTRA 2015 – 11/05/2015

ASTRA 2015 – 11/05/2015 7
■ R&D studies on large field-of-view stereovision Evaluation and calibration of different imaging devices
• Hyperboloidal mirrors • Fisheye cameras
Studies on image resolution, sampling and depth-of-field Comparison of different image rectification techniques 3D reconstruction from image pairs
Perception (3/3)

8
Localisation activities
■ Visual Motion Estimation (VME) Algorithms adaptation for increased OB
memory • Higher accuracy & lower CPU load
Test & validation with images taken on-board a moving rover Characteristics
• Data fusion dead-reckoning/VME/sun sensor
• < 1% localization over 100 m • 1.5 deg azimuth (update with Sun
sensor twice a day)
Current studies on SLAM hybridization
Odometry filter (EKF)
Locomotion sensors
VME
Inertial sensors (IMU) + images
Sun / stellar sensors
6D position
T=160 ms
T=10 s
T=160 ms
T=? s
ASTRA 2015 – 11/05/2015
9
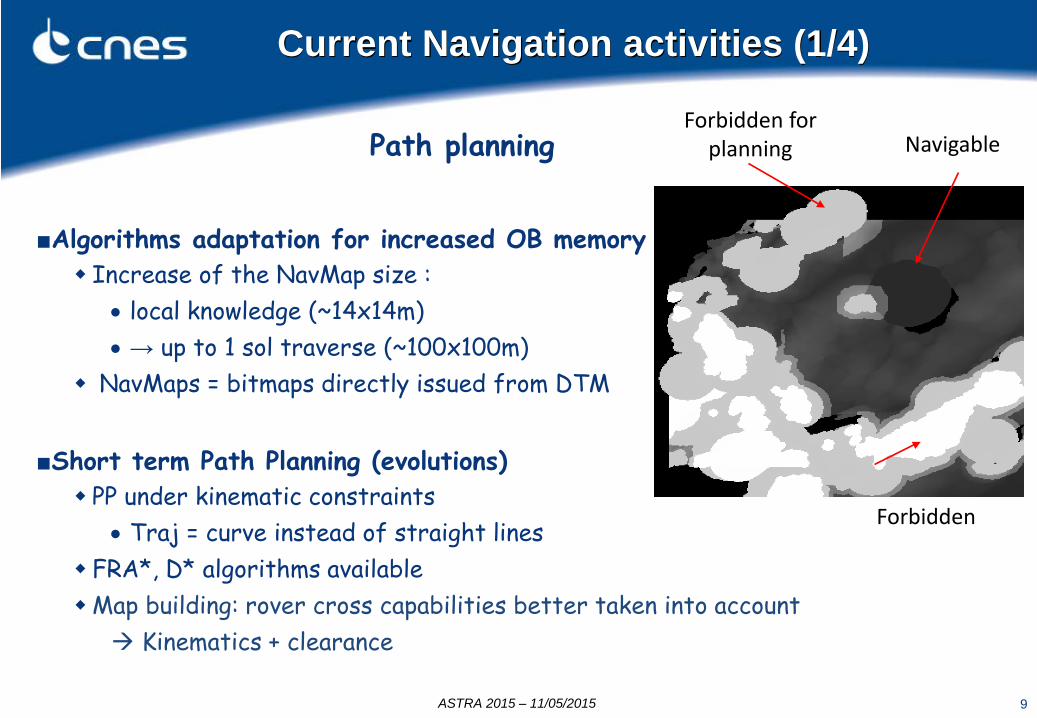
Current Navigation activities (1/4)
■Algorithms adaptation for increased OB memory Increase of the NavMap size :
• local knowledge (~14x14m) • → up to 1 sol traverse (~100x100m)
NavMaps = bitmaps directly issued from DTM
■Short term Path Planning (evolutions) PP under kinematic constraints
• Traj = curve instead of straight lines FRA*, D* algorithms available Map building: rover cross capabilities better taken into account Kinematics + clearance
Forbidden
Forbidden for planning Navigable
ASTRA 2015 – 11/05/2015
Path planning

10
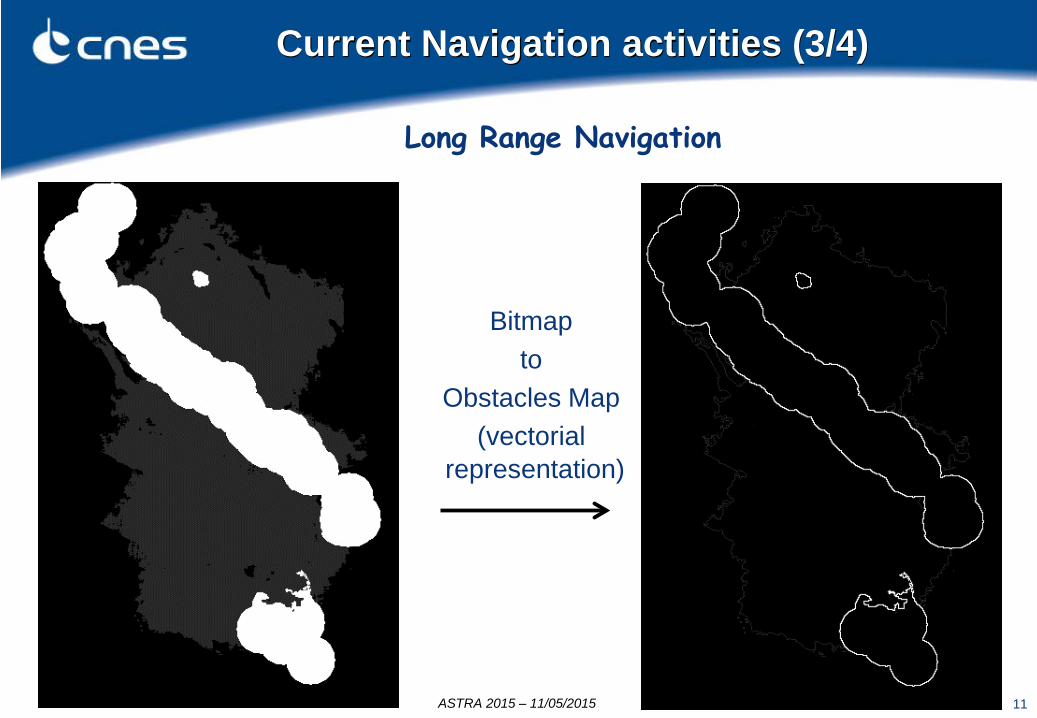
■ Long Range Navigation (efficient map building and path planning) Obstacles Map : Vectorial representation of obstacles from NavMaps that are updated at each Path & Perception Planning step (~4m) Obstacles Map store all obstacles of mission Obstacles map can be pre-initialized with orbiter data and avoidance areas Algorithms compatible with currently available memory & CPU Major pros :
• Low memory usage • All previous knowledge available at each PP step
– avoid dead-end loops, – enable (automated) secured return to landing site
Work consolidated through A. Ruzu thesis
Current Navigation activities (2/4)
ASTRA 2015 – 11/05/2015
11
Current Navigation activities (3/4)
Long Range Navigation
Bitmap to
Obstacles Map (vectorial
representation)
ASTRA 2015 – 11/05/2015
12
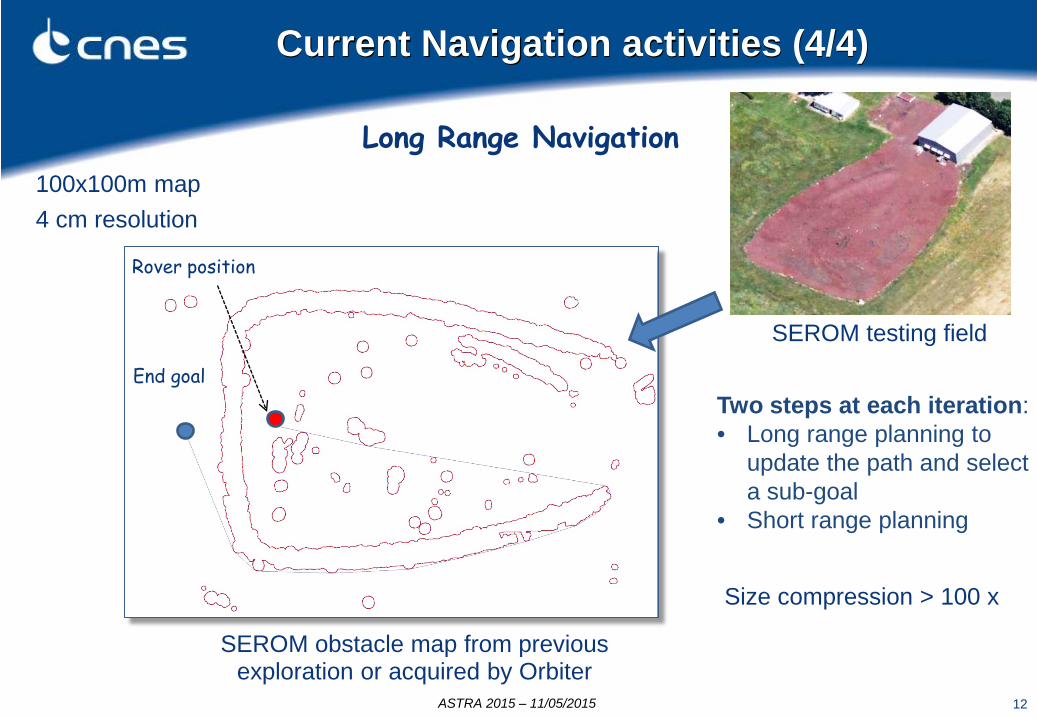
Current Navigation activities (4/4)
Size compression > 100 x
Long Range Navigation 100x100m map 4 cm resolution
Rover position
End goal
SEROM obstacle map from previous exploration or acquired by Orbiter
Two steps at each iteration: • Long range planning to
update the path and select a sub-goal
• Short range planning
ASTRA 2015 – 11/05/2015
SEROM testing field

13
Mapping & localization
■2 types of perception sensors : 3 stereovision systems (Navcams, LocCams,
ZoomCams) 1 LIDAR
■Goals : Evaluation of 3D reconstruction algorithms
with complementary localization sources Data fusion design and optimization
Cameras Lidar
Resolution 1280 x 1024 x 2 32 x 2250 x 1
Acquisition 5 MB 0.2 MB
Spatial cov. 4 x 4 m 40 x 40 m
Nb of pts 26 kpts 36 kpts
CPU +++ --
R&D activity with ONERA (French Aerospace Lab)
Example of LIDAR acquisition around the rover (3x3m) ASTRA 2015 – 11/05/2015
14
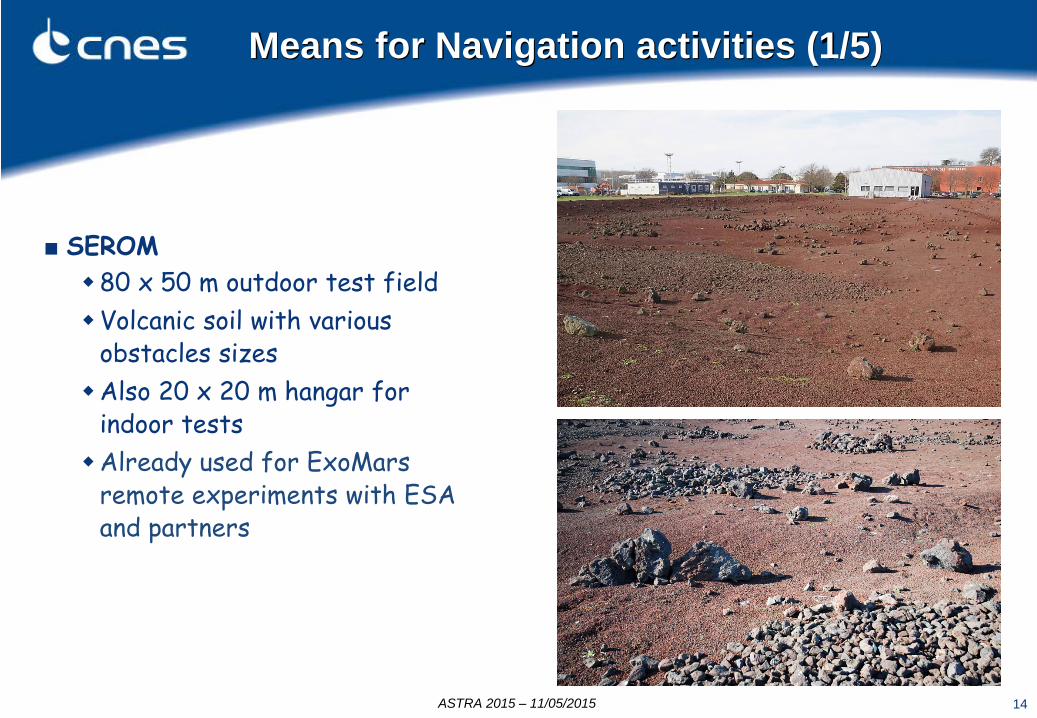
Means for Navigation activities (1/5)
■ SEROM 80 x 50 m outdoor test field Volcanic soil with various
obstacles sizes Also 20 x 20 m hangar for
indoor tests Already used for ExoMars
remote experiments with ESA and partners
ASTRA 2015 – 11/05/2015

15
■ IARES Rover delivered in 1997 (VniiTransmash) 17 + 2 d.o.f Still used for tests
Means for Navigation activities (2/5)
ASTRA 2015 – 11/05/2015

16
■ ARTEMIS New rover demonstrator with Exomars-like
kinematics (6 wheels on 3 rocker bogies) New locomotion control system based on
off-the-shelf components Hardware integration is finished and
locomotion has been validated on SEROM test site Current integration into the CNES
Autonomous Navigation SW test framework
Means for Navigation activities (3/5)
ASTRA 2015 – 11/05/2015
17
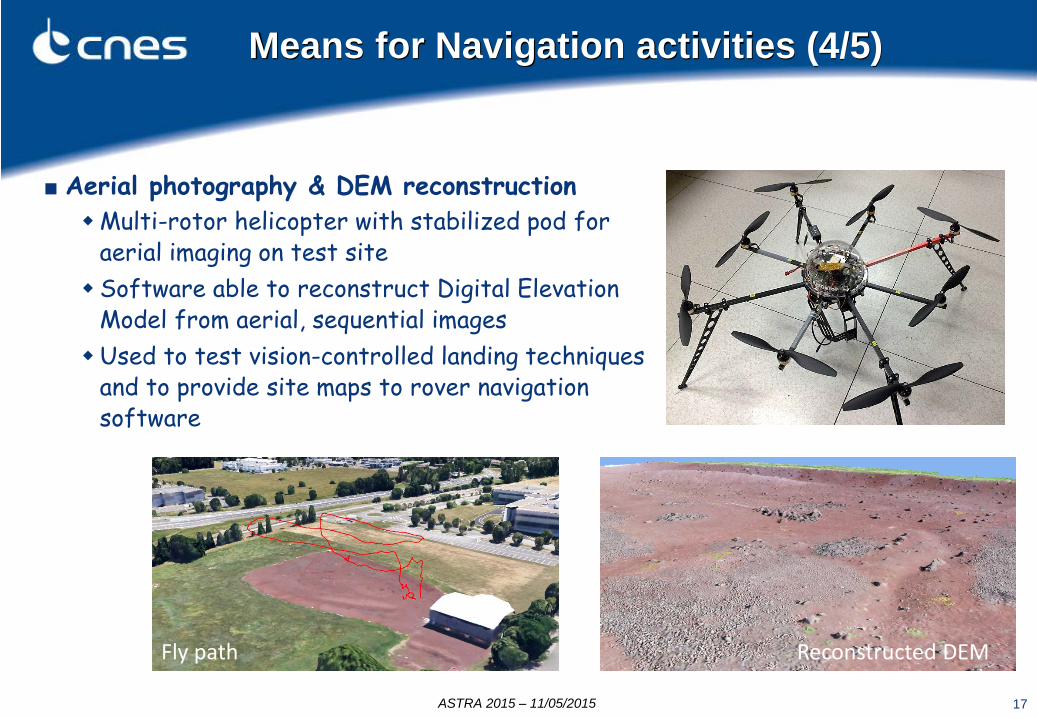
■ Aerial photography & DEM reconstruction Multi-rotor helicopter with stabilized pod for
aerial imaging on test site Software able to reconstruct Digital Elevation
Model from aerial, sequential images Used to test vision-controlled landing techniques
and to provide site maps to rover navigation software
Reconstructed DEM Fly path
Means for Navigation activities (4/5)
ASTRA 2015 – 11/05/2015

18
■ Rover simulator with advanced features Fog, Stones, Real time shadowing, MNT refreshment,
Means for Navigation activities (5/5)
■ Navigation SW test framework analysis tools for easy SW validation operator remote control station
ASTRA 2015 – 11/05/2015

19
Remote testing capabilities
The adaptation of the C&C architecture to allow rover operation from ESTEC by scientists (Exomars context) is under analysis Further experiments can be envisioned ….
The testing facilities can host experiments to be performed from remote locations Experiments have already been achieved in tele-operation from ESTEC ■ Autonomous navigation campaign (2010) ■ Remote operations with scientific instruments
(2011)
ASTRA 2015 – 11/05/2015

20
■Lander first touchdown localization
operations by ROLIS/OSIRIS image & DTM registration (within one hour after touchdown)
■ Lander first rebound trajectory waypoints extraction from Philae's shadow observed on orbiter images taken during rebounds
■ Local DTM reconstructions from ROLIS CIVA-P and ROLIS-CUC images (by stereo-photogrammetry) - Lander movements and drilling trajectory reconstruction from ROLIS-CUC images on final landing site
Rosetta/Philae activities
Support during Philae operations
ASTRA 2015 – 11/05/2015

21
■ Navigation during landing phase on planets or asteroids Adaptation of in-house algorithms (ex: VME) Evaluation of new feature detectors / filtering
techniques Performance assessment on outdoor images with
UAV
■ Navigation for proximity operations around asteroids Feasibility analysis of close range orbiting (gravity
field characterization of Apophis asteroid) Evaluation of navigation techniques in presence of
high gravity uncertainty hybridization of EKF-SLAM / bundle adjustment
Navigation during EDL
R&D activities
ASTRA 2015 – 11/05/2015

22
Conclusion
■ Continuous improvement made on the CNES core field of expertise: Perception / Localization / Map building / Path planning
■ CNES remains open to collaborative work with international partners expertise in perception / autonomous navigation software framework testing facilities (incl. rovers and optical characterization tools)
■ Adaptation of these technologies/subsystems to other/various robotics applications/missions : Ground modeling (landing, probe approaching phase, ...), In orbit modeling (non cooperative objects, ...), Short & long distance localisation (landing, robotics in orbit, ...),
ASTRA 2015 – 11/05/2015
23
Thank you for your attention
ASTRA 2015 – 11/05/2015