Introduction to GPS Ruth Neilan and Jan Kouba IGS Central Bureau at JPL Pasadena, California USA.
21
Introduction to GPS Ruth Neilan and Jan Kouba IGS Central Bureau at JPL Pasadena, California USA
-
Upload
erika-woods -
Category
Documents
-
view
217 -
download
0
Transcript of Introduction to GPS Ruth Neilan and Jan Kouba IGS Central Bureau at JPL Pasadena, California USA.

Introduction to GPS
Ruth Neilan and Jan Kouba
IGS Central Bureau at JPLPasadena, California
USA

Content
• GPS System Description
– Space Segment – Control Segment – User Segment and Ground Segment
• GPS Signals
– Observations, Observation Model• Pseudorange, Carrier Phase
• GPS Positioning
– Navigation/Point Positioning– Relative Positioning/Differencing
• GPS Denial of Accuracy • GPS Error Sources• GPS Future Developments

GPS System Description
• GPS (Global Positioning System) – also called NAVSTAR (NAVigation System, Timing
And Ranging)
• The GPS consists of 3 main segments: – Space Segment: the constellation of satellites – Control Segment: operation and monitoring of the GPS
System – User Segment: all GPS receivers and processing software's
We might add a 4th segment:
• Ground Segment: – permanent civilian networks of reference sites, associated
analyses and archives (e.g. IGS)

GPS Space Segment
• The space segments nominally consists of 24 satellites, currently:– 28 (24+4 spares) active GPS satellites (26 Block II, 2 Block IIR)– Constellation design: at least 4 satellites in view from any location at
any time to allow navigation (solution for 3 position + 1 station clock unknowns)
– “Right Time, Right Place, Any Time, Any Place”• GPS Orbit characteristics:
– Semi-Major Axis (Radius): 26,600 km– Orbital Period : 11 h 58 min– Orbit Inclination: 55 degrees– Number of Orbit Planes: 6 (60 degree spacing)– Number of Satellites: 24 (4 spares)– Approximate Mass: 815 kg, 7.5 year
lifespan– Data Rate (message): 50 bit/sec– PRN (Pseudo-Random Noise) Codes: Satellite-dependent
Codes– Transmit, Frequencies L-Band L1: 1575.42 MHtz
L2: 1227.60 MHtz

GPS Space Segment
• Speed of satellites relative to the Earth center approximately 4 km/s, relative to the user up to 2.8 km/s.
– GPS satellites repeat their ground tracks after: 1 sidereal day = 23 h 56 min = 2 orbital periods. The same geometry is reached 4 minutes earlier every day.
– 2:1 commensurability of GPS revolution period with Earth rotation leads to resonance effects with gravity field (many maneuvers necessary).
– Satellites equally distributed in each of the six orbit planes.

GPS Space Segment
Currently: 26 Block II, 2 Block IIR, no Block I satellites are active.Picture of a Block II Satellite

GPS Control Segment
MCS Colorado Springs
Hawaii
Buenos Aires
US NIMA Tracking Sites
Diego Garcia
Ascension
Bahrain
Kwajalein
Smithfield
US Airforce Tracking SitesUS Airforce Upload Sites
Hermitage
Ouito
US Air Force and NIMA Control and Tracking Stations
See also map at <http://164.214.2.59/GandG/sathtml>MCS – Master Control Station

GPS User and Ground Segment
• User Segment: – All GPS receivers on land, on sea, in the air and in space. – Extremely broad user community with applications of the
GPS for: • Navigation • Surveying • Geodynamics and geophysics • Remote sensing (troposphere and ionosphere) • Time and frequency transfer • etc.
Ground Segment: – IGS global network; IGS products reference frame for
coordinates, orbits, and Earth rotation. – Regional permanent networks (Europe, Japan, US, ...):
densification of the reference frame.

GPS Signals
• Signals driven by an atomic clock – Fundamental Frequency at 10.23 MHz
• Two carrier signals (sine waves): – L 1 : f=1575.43 MHz, ( =19 cm ), generated by 10.23 MHz
x 154– L 2 : f=1227.60 MHz, ( =24 cm), generated by 10.23 MHz
x 120• Bits encoded on carrier by phase modulation:
– C/A-code (Clear Access / Coarse Acquisition): 1.023 MHz ( =300 m ), 10.23/10
– P-code (Protected / Precise): 10.23 MHz ( = 30 m ) at fundamental frequency
– Navigation Message: (system time, “Broadcast” orbits, satellite clock corrections, almanacs, ionospheric information, etc.), 50 bps on both L1 and L2

Observations and Models
– Pseudorange measurements by delay correlation time difference (Tr-T
s) of the received satellite and receiver replica codes
Prs = c (Tr-Ts) = r
s + c (tr - ts)– Phase differences (r- s) (initially ambiguous), analogously by
comparing the received satellite and receiver generated phases:
Lrs = (r- s) = r
s + c (tr - ts) + brs
Where: c is the speed of light; rs is the receiver to satellite distance; is the
wavelength; tr and ts are the receiver and satellite clock errors; brs is the
initial (non-integer) phase bias.

Navigation/Point Positioning
• Typical noise on pseudorange or phase measurements is < 1% of the wavelengths: for C/A pseudorange: < 3m; for P-code: < .3 m and for phase measurements: < 2 mm
• Basic Observation model (equation):r
s + c (tr - ts) + brs + …
– Where ‘…’ indicates additional error sources– for pseudoranges (when br
s =0) contains 4 unknowns (xr, yr, zr, tr) : 3 for the receiver position and one for receiver clock error, and
rs =((xs-xr)2 +(ys-yr)2 +(zs-zr)2)
– satellite positions and clock errors (xs, ys, zs, ts) are obtained from the navigation (broadcast) message
– at least four (typically 6) simultaneous pseudorange observations are needed for receiver position and clock determination (at m, nsec level)
– for phases an initial phase bias unknown brs per each observed
(continuous) satellite arc must be introduced. After that (subject to an initial phase/clock datum), phase navigation is completely analogous to pseudorange navigation.

Relative Positioning by Differencing
• Single differencing : by subtracting simultaneous phase observations from station A and B to the same satellite S
[ As + c (tA - ts) + bA
s + …]–[ Bs + c (tB - ts) + bB
s + … ]= AB
s + c tAB + bABs
– nearly eliminates satellite clocks, receivers must be synchronized within 1 msec
– reduces some common errors, in particular for short baselines A-B, such as errors due to orbit, ionosphere or troposphere
– solutions for the station clock difference tAB still required
• Double differencing: by subtracting two single differences (between stations A,B) to the satellites i and j.
ABij + NAB
ij – where AB
ij = ABi - AB
j and the double difference phase ambiguity NAB
ij = bABi- bAB
j is an integer! (all phase instrumental biases cancel out)
– station clock differences are nearly eliminated! Only 3 relative position unknowns needed after the initial integer ambiguities are resolved

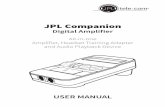
GPS Positioning: Simplified Concepts, Basic Error SourcesGPS
A
obs A
Ts obs A= observed time delay from SV signal
transmit to station A signal reception
TR = Time signal received at A
Ts = Time signal trasmitted from SV
geo = delay due to geometry, distance
Clk A = apparent delay due to user clock offset
sv = apparent delay due to satellite clock offset
iono = dispersive delay due to ionosphere
atm(wet/dry) = delay due to troposphere
mult = delay due to multipath (m), signal reflectionTRm
obs A = = (TR - Ts ) = geo+ Clk A - sv + iono + atm(wet/dry) + mult +...
Basic Concepts

Single Differencing: reduces common errors, SV Clock nearly cancels, appropriate for short baselines
GPS
A
B
A
B
AB =A- B
ts
tA
tB
AB = A- B = [As + c (tA - ts) + bA
s +…]-[ Bs + c (tB - ts) + bB
s +…]
= ABs + c tAB + bAB
s
A = observed distance, including errors
As = correct ‘true’ distance SV to station
((xS-xA)2+(yS-yA)2+(zS-zA)2)1/2
tA or B = station clock error
ts = satellite clock errortAB= difference in station clock offsets
c = speed of light
b = initial phase bias SV to station
= baseline
Differencing Techniques

Ai
Bi
A
B
GPSi
GPSj
Bj
Bj
ABij = AB
i - ABj
bABij = bAB
i - bABj = NAB
ij -->> an integer phase ambiguity
Double Differencing: station clock offsets nearly cancel, only 3 relative positions needed, (x,y,z)
Differencing Techniques

GPS Denial of Accuracy • Selective Availability (SA): intentional degradation of accuracy
– Increased navigation errors (based on broadcast orbits/clocks) from several meters to more than 30 m !
– Epsilon: navigation message contained intentional orbit errors; apparently not used; no effect when using IGS precise orbits.
– Dither: satellite clock was dithered; same effect as a satellite clock error; eliminated (mitigated) when using relative (differential) positioning; no effect when using IGS precise clocks (but only at the epochs of the IGS precise clock)
– cm phase navigation/positioning with IGS precise orbits and clocks!
– Switched off permanently on May 2, 2000 WK 1060, Day of Year 123) at 04:00UT as directed by the President of the US.
• Anti-Spoofing (AS): denial of precise P-code – Encryption of the more precise P-code on L1 and L2 (a key
available only to authorized users)– Modern GPS receivers can still perform precise code
(< .3m)and phase (<2mm) measurements on L1 and L2 – Somewhat increased noise level for code measurements and
for L2 carrier phase measurements even for modern GPS receivers.

GPS Error Sources
• Satellite orbits– IGS Final or Rapid orbits (available within 24h) virtually eliminate
orbit errors (<.1m) for post-processing at any epoch – In real-time the broadcast orbit errors (~3m) can be reduced (< 1m)
by DGPS (Differential GPS) or by using IGS Predicted or the Ultra-Rapid orbits
• Satellite clocks– for relative positioning double differencing nearly eliminates satellite
clock errors– IGS Final or Rapid satellite clocks (available within 24h) virtually
eliminate satellite clock errors (<.1m) for post-processing (currently only at the 5 min epoch sampling)
– in real time the broadcast clock errors (SA) reduced by DGPS
• Tropospheric refraction– virtually eliminated by estimating corrections to a model (also used
in GPS meteorology); or at IGS stations, by using the IGS tropospheric delay products!
– nearly eliminated (< .1m) by using a model with measured met data– reduced by a nominal model and/or differential positioning (e.g.
DGPS)

GPS Error Sources
• Ionospheric refraction– for dual frequency receivers, the use of (P1, P2) or (L1, L2) virtually
eliminates ionospheric refraction (also used for ionospheric delay determination/monitoring, e.g. by IGS, the IGS ionospheric delay products )
– For single frequency receivers, the use of IGS ionospheric delay products (available within a few weeks) significantly reduces ionospheric refraction errors
– For single frequency receivers, ionospheric refraction errors reduced in differential (relative) positioning (e.g. DGPS) for baselines up to 100 km
• Antenna phase center variations– virtually eliminated in relative positioning over moderate baseline
lengths (<500km) when using the same antenna types – antenna phase center corrections (e.g. IGS antenna phase center tables)
must be used for different antenna types and precise positioning (<.1m)• Multipath
– difficult to mitigate, errors can reach a few cm for the phase and up to a meter or more for pseudorange positioning/navigation
– reduced by improved site selections and hardware (receiver/antenna) designs

• GPS Modernization – C/A on L2, improve codeless, cross correclation receiver processing– 3rd frequency, L5 at 1176.45 MHz with full access to frequencies
available for civilian use– improved satellite designs, longer life, Hydrogen Maser frequency
standards– Spectrum protection for GPS signals remains an issue, conflict with
satellite communications interests – Need space-to-space allocation for GPS use
• Full and guaranteed access (in peace time) to civilian use– guaranteed by the Presidential Decision Directive (PDD), March 1996:
• SA switched off on May 2, 2000, GPS WK 1060, 123 doy at 04:00UT• no SA should allow cm interpolation of the IGS clock solutions and
instantaneous cm positioning/navigation at any instant at any time with no base (DGPS) stations required
• with no SA most DGPS’ should become obsolete and redundant
Future Developments

Websites
• GPS Links from IGS: http://igscb.jpl.nasa.gov/overview/links.html
• U.S. Coast Guard Navigation Information Center: http://www.navcen.uscg.mil
• U.S. Department of Transportation: http://www.dot.gov
• NIMA Satellite Geodesy: http://164.214.2.59/GandG/sathtml/
• UNAVCO: http://www.unavco.ucar.edu/
• GPS Environmental & Earth Science Information System: http://genesis/html/index.shtml
• GPS Joint Program Office http://gps.laafb.af.mil/
Books:
• Institute of Navigation, Global Positioning System, Vol. I, Papers published in NAVIGATION, ISBN: 0-936406-00-3, 1980 (Spilker, Van Dierendonck, etc.
• American Institute of Aeronautics and Astronautics (AIAA), Global Positioning System: Theory and Applications, Volume I & II, Progress in Astronautics and Aeronautics ISBN or Order Number: 1-56347-107-8 , 1996
• Kleusberg, A. P. Teunissen,ed. GPS for Geodesy, Lecture Notes in Earth Sciences, Springer-Verlag, ISBN 3-540-60785-4, 1996
• Springer, T.A., “Modeling and Validating Orbits and Clocks Using the Global Positioning System”, Doctoral Thesis, University of Bern, Switzerland, November 1999
References

QUESTIONS?
Ruth E. Neilan
IGS Central BureauJet Propulsion Laboratory,
Pasadena, California, USA