
FLOWFIELD CHARACTERIZATION AND MODEL DEVELOPMENT IN · FLOWFIELD CHARACTERIZATION AND MODEL...
223
FLOWFIELD CHARACTERIZATION AND MODEL DEVELOPMENT IN DETONATION TUBES A DISSERTATION SUBMITTED TO THE DEPARTMENT OF AERONAUTICS & ASTRONAUTICS AND THE COMMITTEE ON GRADUATE STUDIES OF STANFORD UNIVERISTY IN PARTIAL FULLFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY Zachary Clark Owens February 2008
Transcript of FLOWFIELD CHARACTERIZATION AND MODEL DEVELOPMENT IN · FLOWFIELD CHARACTERIZATION AND MODEL...

i
FLOWFIELD CHARACTERIZATION AND MODEL DEVELOPMENT IN
DETONATION TUBES
A DISSERTATION
SUBMITTED TO THE DEPARTMENT OF AERONAUTICS & ASTRONAUTICS
AND THE COMMITTEE ON GRADUATE STUDIES
OF STANFORD UNIVERISTY
IN PARTIAL FULLFILLMENT OF THE REQUIREMENTS
FOR THE DEGREE OF
DOCTOR OF PHILOSOPHY
Zachary Clark Owens
February 2008

ii

iii
© Copyright by Zachary C. Owens 2008 All Rights Reserved

iv

v
I certify that I have read this dissertation and that, in my opinion, it is fully adequate in scope and quality as a dissertation for the degree of Doctor of Philosophy.
Ronald K. Hanson, Principal Adviser I certify that I have read this dissertation and that, in my opinion, it is fully adequate in scope and quality as a dissertation for the degree of Doctor of Philosophy.
Brian J. Cantwell I certify that I have read this dissertation and that, in my opinion, it is fully adequate in scope and quality as a dissertation for the degree of Doctor of Philosophy.
Robert W. MacCormack
Approved for the Stanford University Committee on Graduate Studies.

vi

vii
Abstract A series of experiments and numerical simulations are performed to advance
the understanding of flowfield phenomena and impulse generation in detonation tubes.
Experiments employing laser-based velocimetry, high-speed schlieren imaging and
pressure measurements are used to construct a dataset against which numerical models
can be validated. The numerical modeling culminates in the development of a two-
dimensional, multi-species, finite-rate-chemistry, parallel, Navier-Stokes solver. The
resulting model is specifically designed to assess unsteady, compressible, reacting
flowfields, and its utility for studying multidimensional detonation structure is
demonstrated. A reduced, quasi-one-dimensional model with source terms accounting
for wall losses is also developed for rapid parametric assessment. Using these
experimental and numerical tools, two primary objectives are pursued. The first
objective is to gain an understanding of how nozzles affect unsteady, detonation
flowfields and how they can be designed to maximize impulse in a detonation based
propulsion system called a pulse detonation engine. It is shown that unlike
conventional, steady-flow propulsion systems where converging-diverging nozzles
generate optimal performance, unsteady detonation tube performance during a single-
cycle is maximized using purely diverging nozzles. The second objective is to
identify the primary underlying mechanisms that cause velocity and pressure
measurements to deviate from idealized theory. An investigation of the influence of
non-ideal losses including wall heat transfer, friction and condensation leads to the
development of improved models that reconcile long-standing discrepancies between
predicted and measured detonation tube performance. It is demonstrated for the first
time that wall condensation of water vapor in the combustion products can cause
significant deviations from ideal theory.

viii

ix
Acknowledgements I am greatly indebted to my advisor, Professor Ron Hanson, for his mentorship
and the opportunity to work in a world-class research laboratory. Many students over
the years, including myself, have benefited from the outstanding environment
Professor Hanson has created for his students. We have access to a team of Senior
Research Associates, Post-docs, fellow graduate students, and facilities that are
absolutely second-to-none. My research has greatly benefited from Professor
Hanson’s accumulated wisdom and the lessons I have learned will serve me well both
professionally and personally for years to come. I would also like to acknowledge the
other members of my committee, Professors Robert MacCormack, Brian Cantwell,
and Antony Jameson whom I had for several courses covering topics of fundamental
importance to the content of this thesis.
Numerous friends and colleagues have made my time at Stanford a truly
enjoyable experience. My office mates over the years including Dan Mattison, Ethan
Barbour, Greg Rieker, Kevin Hinkley, Genny Pang and Brian Lam have made for a
collaborative work environment with plenty of comic relief. I am especially thankful
to Dan for getting me started in the lab during my first couple years, and Ethan whose
innate intellectual curiosity make him an invaluable research partner. The lunch time
crew, including Matt Oehlschlaeger, Rob Cook, Venkatesh Vasudevan, Brian Cheung
and Jordan Snyder, has been at the source of many entertaining and often ridiculous
conversations. Of course Dave Davidson, the ‘spiritual leader’ of our MERL clan has
always been willing to take time out from whatever he is doing to lend a hand to one
of us students, and I am especially thankful for his help. I have also benefited greatly
from collaborations and discussions with former Hanson lab alumni including Matei
Radulescu and Chris Morris.
Surf or snowboard sessions with Ben Gauthier, Cliff Wall, and Kevin Walters,
in addition to Thanksgiving dinners with the Rothamer family and soccer adventures

x
with A.C. Durand have also made for great times. I was also lucky to have great
housemates during my time at Stanford including Josh Alwood and Felipe Sediles.
I would also like to acknowledge former professors I had at the University of
Virginia including Sam Fisher and James McDaniel. Both men were instrumental in
shaping my research interests as an undergraduate. I would also like to thank my good
friends and housemates of four years at U.V.A. including Rakesh Gopalan, Adam
Goobic, Scott McGihon and Tom Nelson.
Last, but certainly not least, I would like to thank my love and best friend
Shanna. I am thankful our paths collided during my early days at Stanford and she has
been central to my life and never far from my thoughts ever since. I am also thankful
to my Mom and Dad, whom I will always admire, and my sister and brother, Carly
and Ty, for being my foundation. I am very blessed to have such a loving and
supportive family.

xi
Table of Contents
Abstract………………………………………………...…………...…..vii
Acknowledgements…………………………………………….......……ix
Table of Contents…………………………………………...………..…xi
List of Figures…………………………….………………...………..…xv
List of Tables……………………………………….....…………….…xxi
Nomenclature………………………………………….…….………..xxii
CHAPTER 1: INTRODUCTION ........................................................... 1
1.1 Overview ..................................................................................................................1
1.2 Detonation Fundamentals.........................................................................................2
1.2.1 Chapman-Jouguet Theory .................................................................................2
1.2.2 ZND Theory ......................................................................................................6
1.2.3 Taylor Wave ......................................................................................................8
1.2.4 Multidimensional Detonation Structure ..........................................................11
1.3 Pulse Detonation Engines.......................................................................................12
1.4 Thesis Outline.........................................................................................................15
CHAPTER 2: NUMERICAL MODELING ........................................ 17
2.1 Introduction ............................................................................................................17
2.2 Governing Equations – Cartesian Coordinates.......................................................18
2.2.1 Equation of State & Thermodynamic Variables .............................................20
2.2.2 Diffusive Transport Variables ......................................................................... 22
2.2.3 Chemical Reaction Variables ..........................................................................24
2.3 Governing Equations – Curvilinear Coordinates ...................................................26
2.4 Numerical Methods & Implementation..................................................................27
2.4.1 Time Integration ..............................................................................................27
2.4.2 Convection Terms ...........................................................................................30

xii
2.4.3 Diffusion Terms...............................................................................................36
2.4.4 Source Terms...................................................................................................37
2.4.5 Boundary Conditions.......................................................................................38
2.4.6 Grid Generation ............................................................................................... 39
2.4.7 Parallelization .................................................................................................. 41
2.5 Model Verification .................................................................................................42
CHAPTER 3: FLOWFIELD CHARACTERIZATION USING CESIUM-BASED VELOCIMETRY .................................................... 43
3.1 Introduction ............................................................................................................43
3.2 Facility Description ................................................................................................ 44
3.3 Sensor Description.................................................................................................. 46
3.4 Data Reduction Methodology.................................................................................48
3.5 Numerical Models ..................................................................................................50
3.6 Results ....................................................................................................................52
3.7 Conclusions ............................................................................................................57
CHAPTER 4: UNSTEADY NOZZLE DESIGN & IMAGING ......... 59
4.1 Introduction ............................................................................................................59
4.2 Numerical Model....................................................................................................62
4.3 Area Ratio Effects on Nozzle Performance............................................................64
4.3.1 Test Configuration...........................................................................................64
4.3.2 Simulation Results...........................................................................................67
4.4 Impulse Measurement & Schlieren Imaging..........................................................73
4.4.1 Test Configuration...........................................................................................73
4.4.2 Thrust Measurement Results ...........................................................................77
4.4.3 Schlieren Imaging Results ...............................................................................83
4.4.4 Specific Impulse Results .................................................................................91
4.5 Conclusions ............................................................................................................94
CHAPTER 5: MULTIDIMENSIONAL DETONATION STRUCTURE.......................................................................................... 97
5.1 Introduction ............................................................................................................97

xiii
5.2 Background & Fundamentals .................................................................................98
5.3 Numerical Implementation...................................................................................101
5.4 Weakly Unstable Detonation................................................................................103
5.5 Highly Unstable Detonation ................................................................................. 105
5.6 Effect on PDE Impulse.........................................................................................108
5.7 Conclusions ..........................................................................................................113
CHAPTER 6: THE INFLUENCE OF WALL HEAT TRANSFER, FRICTION AND CONDENSATION................................................. 115
6.1 Introduction ..........................................................................................................115
6.2 Wall Heat Transfer & Friction Models ................................................................118
6.2.1 Toronto Model...............................................................................................119
6.2.2 ΔT and Δh Models.........................................................................................120
6.2.3 Hybrid Model ................................................................................................ 123
6.3 Model Validation & Case Study...........................................................................125
6.3.1 Numerical Setup – Low Pressure Case .........................................................126
6.3.2 Cf Calibration – Low Pressure Case .............................................................. 129
6.3.3 Results – Low Pressure Case......................................................................... 131
6.3.4 Numerical Setup – High Pressure Case.........................................................139
6.3.5 Cf Calibration – High Pressure Case ............................................................. 139
6.3.6 Results – High Pressure Case ........................................................................142
6.3.7 Comparison with Experimental Pressure History .........................................146
6.4 Condensation Effects............................................................................................149
6.4.1 Experimental Setup .......................................................................................150
6.4.2 Condensation Modeling & Numerical Setup ................................................152
6.4.3 Condensation Results – Performance Impact................................................157
6.5 Conclusions ..........................................................................................................163
CHAPTER 7: CONCLUSIONS & FUTURE WORK...................... 165
7.1 Conclusions ..........................................................................................................165
7.2 Future Work..........................................................................................................167

xiv
Appendix A: Cartesian & Curvilinear Eigensystems……………....169
Appendix B: Finite Difference Formulas…………………...……….175
Appendix C: Flowfield Evolution after Non-Direct Initiation……..179
Bibliography…………………………………………………………..183

xv
List of Figures
Figure 1.1 Detonation propagation with w denoting the shock-fixed frame velocities and Vw detonating the laboratory frame wave velocity. 3
Figure 1.2 Rayleigh lines (blue) and Rankine-Hugoniot curve (red) in
P-v plane. Tangency points define Chapman-Jouguet (C-J) state. 4
Figure 1.3 ZND reaction zone structure for stoichiometric H2-O2 at
P1=1 atm, T1=298 K. The GRI 3.0 chemical kinetic mechanism is used [Smith et al. (2000)]. 7
Figure 1.4 Space-time (x-t) diagram of detonation propagating away
from closed end wall. State 1 consists of unburned reactants, state 2 is the C-J state and state 3 corresponds to the stagnation region behind the Taylor wave. 8
Figure 1.5 Taylor wave profiles for P1=1 atm, T1=298, stoichiometric
H2-O2. 11
Figure 1.6 Single-Pulse PDE operating cycle. 13
Figure 2.1 Figure 2.1 Computational grid with vertical dotted lines representing flux surfaces. The horizontal lines (k=0:3) denote the stencils used in the construction of the flux at the i+1/2 surface using the WENO-5M scheme. 30
Figure 2.2 The left side of figure illustrates continuous grid-stretching
and right side illustrates compound grid-stretching. 40
Figure 3.1 Schematic of Stanford PDE facility with cesium-based velocimetry diagnostic. 45
Figure 3.2 Modular cesium seeding port. 47
Figure 3.3 Figure 3.3 Sample of upstream and downstream
transmitted signals and corresponding output from cross-correlation procedure. 49

xvi
Figure 3.4 Velocimetry data for straight-tube PDE plotted against model data. 54
Figure 3.5. Velocimetry data for converging-diverging nozzle
configured PDE plotted against model data. Window [b] shows a region of window [a] with the vertical axis rescaled. 55
Figure 3.6 Simulated temperature histories for the C-D nozzle
configured PDE. 56
Figure 4.1 Single-pulse Isp for a PDE with and without a C-D nozzle as compared to a steady rocket engine. The reactants are stoichiometric H2-O2 at Pfill=1 atm and Tfill=300 K. Data from Morris (2005a). 60
Figure 4.2 Configuration used for parametric analysis of area ratio
effects. Tube length and nozzle length are fixed while nozzle contraction and expansion area ratios are varied by changing the inlet and exit angles. Detonation formation and propagation are computed with the fully reactive set of equations until the detonation reaches the nozzle inlet at which point the chemistry is frozen for the remainder of the blowdown. 65
Figure 4.3 Single-cycle Isp versus area ratio. Reference Isp for the
straight-tube extension is 180.2 sec. (Pfill = Pamb = 1 atm) 68
Figure 4.4 Normalized single-cycle blowdown time versus area ratio. Blowdown times have been normalized by the straight-tube blowdown time. (Pfill = Pamb = 1 atm) 68
Figure 4.5 Po,avg versus area ratio. Reference Po,avg for the straight tube
is 6.53 atm. (Pfill = Pamb = 1 atm) 71
Figure 4.6 Diverging nozzle Isp versus expansion area ratio. Crossed points indicate isentropic prediction of optimal expansion area ratio. For each case Pfill = Pamb. 71
Figure 4.7 Geometry for C-D nozzle (left) and diverging nozzle
(right). Nozzle width (into page) is constant and equal to 3.38 cm. The dotted square indicates viewable section during schlieren imaging. 74

xvii
Figure 4.8 Experimental PDE facility with planar, nozzle viewing chamber. Also shown is mirror-based, Z-arrangement schlieren imaging system. 75
Figure 4.9 Straight-tube thrust comparison of simulation versus
experiment. Time zero corresponds to ignition and the blowdown is terminated when Phead = 1 atm. 79
Figure 4.10 Converging-diverging nozzle component thrust comparison
of simulation (A) versus experiment (B). Time zero corresponds to ignition and the blowdown is terminated when Phead = 1 atm. 81
Figure 4.11 Converging-diverging nozzle total thrust comparison of
simulation versus experiment. The arrival of the detonation wave at the nozzle has been used to align the features in each plot. Time zero corresponds to ignition in the experimental data only. 81
Figure 4.12 Diverging nozzle component thrust comparison of
simulation (A) versus experiment (B). Time zero corresponds to ignition and the blowdown is terminated when Phead = 1 atm. 83
Figure 4.13 Diverging nozzle total thrust comparison of simulation
versus experiment. The arrival of the detonation wave at the nozzle has been used to align the features in each plot. Time zero corresponds to ignition in the experimental data only. 83
Figure 4.14 Straight-tube blowdown image sequence. Numbers above
each frame indicate time in milliseconds from ignition. Knife edge is oriented vertically such that right-moving shocks appear darker. 85
Figure 4.15 Converging-diverging nozzle detonation passage sequence.
Numbers above each frame indicate time in milliseconds from ignition. Knife edge is oriented horizontally such that downward-moving shocks appear darker. 87
Figure 4.16 Converging-diverging nozzle blowdown image sequence.
Numbers above each frame indicate time in milliseconds from ignition. Knife edge is oriented vertically such that right-moving shocks appear darker. 89

xviii
Figure 4.17 Diverging nozzle blowdown image sequence. Numbers above each frame indicate time in milliseconds from ignition. Knife edge is oriented vertically such that right-moving shocks appear darker. 90
Figure 5.1 Schlieren images from Austin (2003) demonstrating weakly
unstable and highly unstable propagation modes in frames (a) and (b), respectively. Frame (a) is a stoichiometric, H2-O2 mixture with 85% Ar dilution at P1=20 kPa. Frame (b) is a stoichiometric C3H8-O2 mixture with 60% N2 dilution at P1=20 kPa. 98
Figure 5.2. Triple point structure for weakly unstable detonation. Left
side of figure highlights major elements of front structure while right side shows a numerical computation of density gradient (Equation 5.1). 99
Figure 5.3 Dotted lines show trajectory of primary triple points as the
detonation propagates from left to right. Diamond patterns like that illustrated here are recorded experimentally by placing soot covered foils on the walls of the detonation tube. As the triple points traverse the soot foil they scrub off patterns indicating their path of motion. 100
Figure 5.4. Initial condition for detonation structure simulations in the
quasi-shock-fixed frame. 102
Figure 5.5. Weakly unstable detonation completing one cell cycle. Mixture composition: Φ=1, H2-O2, 70% Ar , P1=6.67 kPa, T1=298 K. Inter-frame time step is 4 μs. First column represents a schlieren-like plot of the density gradient. The second column is pressure (atm), the third is temperature (K), and the fourth is XOH. 104
Figure 5.6. Highly unstable detonation sequence. Mixture
composition: Φ=1, H2-O2 , P1=6.67 kPa, T1=298 K. Inter-frame time step is 4 μs. First column represents a schlieren-like plot of the density gradient. The second column is pressure (atm), the third is temperature (K), and the fourth is XOH. 107
Figure 5.7 Centerline pressure from a) 2-D simulation versus b) 1-D simulation. 110

xix
Figure 5.8. Schlieren-like plot of detonation propagation in laboratory reference frame. Frame a) 0 μs, b) 40 μs, c) 80 μs, d) 120 μs, e) 152 μs. Mixture is stoichiometric H2-O2 with 70% Ar dilution at P1=6.67 kPa, T1=298 K. 110
Figure 5.9 Comparison of 1-D versus 2-D (spatially-averaged) head
wall pressure. The mixture is stoichiometric H2-O2 with 70% Argon dilution at P1=6.67 kPa and T1=298 K. 111
Figure 5.10 Comparison of 1-D versus axisymmetric (spatially-
averaged) head wall pressure. The mixture is stoichiometric H2-O2 at P1=6.67 kPa and T1=298 K. 113
Figure 6.1 Comparison of wall heat flux and shear stress profiles for
fine and coarse near-wall grid resolution. 127
Figure 6.2 Simulated wall heat flux for low pressure case study. 130
Figure 6.3 Simulated wall shear stress for low pressure case study. 130
Figure 6.4 Simulated, full-cycle wall heat flux for low pressure case study. 131
Figure 6.5 Simulated, full-cycle wall shear stress for low pressure case
study. 131
Figure 6.6 Simulated head pressure for low pressure case study. 134
Figure 6.7 Simulated forces and energy sources (or sinks) for low pressure case. 137
Figure 6.8 Comparison of models with Ragland’s (1967) heat flux
data for stoichiometric H2-O2 at P1=1 atm, T1=298 K. 140
Figure 6.9 Comparison of simulated shear stress profiles for stoichiometric H2-O2 at P1=1 atm, T1=298 K. 142
Figure 6.10 Simulated, full-cycle wall heat flux for high pressure case
study. 143
Figure 6.11 Simulated, full-cycle wall shear stress for high pressure case study. 143
Figure 6.12 Simulated head pressure for high pressure case study. 144

xx
Figure 6.13 Simulated forces and energy sources (or sinks) for high pressure case. 145
Figure 6.14 Comparison of simulated head pressure to measurements
from Kiyanda et al. (2002) for stoichiometric H2-O2 at P1=1 atm, T1=298 K. 147
Figure 6.15 Framework used in the formulation of the 1-D
condensation models. 152
Figure 6.16 Comparison of Toronto Model predicted heat flux and shear stress for stoichiometric H2-O2 versus C2H4-O2 at P1=1 atm, T1=298 K. 156
Figure 6.17 Cold wall (293 K) head pressure measurements. Ideal
Model contains no wall losses. 157
Figure 6.18 Hot wall (376 K) head pressure measurements. Ideal Model contains no wall losses. 157
Figure 6.19 Comparison of simulated head pressure from Hybrid Model
with and without Non-Linear Condensation Model for cold wall case. 160
Figure 6.20 Comparison of simulated head pressure from Linear and
Non-Linear Condensation Models for cold wall case. 160
Figure 6.21 Performance versus diameter for stoichiometric C2H4-O2 at P1=1 atm in 1.6 m long facility. 162
Figure C.1 Initial flowfield evolution after non-direct initiation. Left
column of images reveals schlieren-like density gradient and right column is the temperature field (K). Mixture is stoichiometric H2-O2 at T1=298, P1=1 atm. 180

xxi
List of Tables
Table 4.1 Comparison of measured and computed single-cycle Isp for each nozzle. Rows shaded in gray contain experimental measurements and non-shaded rows contain simulated results. Simulations are performed with direct initiation while experiments have a finite DDT distance. The total impulse used to evaluate each Isp is evaluated over a single tcycle. (Pfill = Pamb = 1 atm). 92
Table 6.1 Curve fit parameters used to approximate wall heat flux and shear stress from Toronto Model. 125
Table 6.2 Isp results for low pressure case study. 135
Table 6.3 Isp results for high pressure case study. 144
Table 6.4 Summary of Isp,head between hot wall (376 K) and cold wall (293 K) cases. 158

xxii
Nomenclature
Matrices/Vectors: F Convective flux vector (x-direction)
F’ Convective flux vector (ξ-direction)
Fv Diffusive flux vector (x-direction)
Fv’ Diffusive flux vector (ξ-direction)
G Convective flux vector (y-direction)
G’ Convective flux vector (η-direction)
Gv Diffusive flux vector (y-direction)
Gv’ Diffusive flux vector (η-direction)
H Axisymmetric convective source vector
H’ Curvilinear axisymmetric convective source vector
Hv Axisymmetric diffusive source vector
Hv’ Curvilinear axisymmetric diffusive source vector
ix Unit vector in x-direction
iy Unit vector in y-direction
L Left eigenvectors of conservative variable Jacobian (rows)
M Conservative-to-primitive variable transformation matrix
O Source term vector for heat loss, friction, and mass transport
P Right eigenvectors of primitive variable Jacobian (columns)
Q Quasi-1D source term vector
q Velocity vector in Cartesian coordinates (or) primitive variable vector
R Right eigenvectors of conservative variable Jacobian (columns)
S Chemical source term vector
S’ Curvilinear chemical source term vector
sη Curvilinear η vector
sξ Curvilinear ξ vector
U State vector

xxiii
U’ Curvilinear state vector
λ Eigenvalues vector
Scalars: A Cross-sectional area
Aexit/Athroat Expansion area ratio
An Pre-exponential factor for nth reaction
Athroat/Atube Contraction area ratio
Aw Wall surface area
a Sound speed
a0:2 Coefficients for heat flux curve fit
al,i Coefficient of lth parameter in thermodynamic fit of species i
B1:2 Heat flux parameter
b0:3 Coefficients for shear stress curve fit
C Arbitrary constant
Cf Friction coefficient
Cp Mixture specific heat at constant pressure per mole
Cp,i Specific heat at constant pressure of species i per mole
Cv Mixture specific heat at constant volume per mole
Cv,i Specific heat at constant volume of species i per mole
c Specific heat
cp Mixture specific heat at constant pressure per unit mass
cp,i Specific heat at constant pressure of species i per unit mass
cv Mixture specific heat at constant volume per unit mass
cv,i Specific heat at constant volume of species i per unit mass
D Diameter
Dh Hydraulic diameter
Di Diffusion coefficient of species i into the mixture
Dji Binary diffusion coefficient of species j into species i
Dmax Maximum species diffusion coefficient amongst all ns species

xxiv
dS Differential surface
dV Differential volume
E Total mixture energy per unit volume
En Activation energy for reaction n (same units as Ru)
ei Internal energy of species i per unit mass
F’’’ Wall shear force per unit volume
Fx Force component in x-direction
f Scalar flux component of F
g Gravitational acceleration
gk Corrected weighting parameter for stencil k
H Mixture enthalpy per mole (or) height of computational domain
H Numerical flux function
Hi Enthalpy of species i per mole
h Mixture enthalpy per unit mass (or) height of stretched grid region
haw Adiabatic wall enthalpy
hcond Condensation heat transfer coefficient
hi Enthalpy of species i per unit mass
hif Enthalpy of formation of species i per unit mass
hfg Enthalpy of vaporization
hw,eq Enthalpy at wall temperature and equilibrium composition
Δho Heat of reaction extrapolated to zero temperature
Isp Specific impulse
Isp,head Specific impulse from pressure force acting at head wall
i Species (or) grid node index
J Jacobian of coordinate system transformation
j Grid node index
Kc,n Equilibrium constant for reaction n in concentration units
Kp,n Equilibrium constant for reaction n in pressure units
k Mixture thermal conductivity (or) stencil index (or) arbitrary coordinate
ki Thermal conductivity of species i

xxv
kf,n Forward rate constant for reaction n
kr,n Reverse rate constant for reaction n
L Length
M Mach number
ML Index of grid surface at end of computational domain
MLFM Index of grid surface at end of stretched region
m Grid surface index (or) mass
m& Mass flow rate
condm& Mass flow rate into condensation layer
n Reaction number index
ns Number of species
nr Number of reactions
P Pressure
Pamb Ambient pressure
Patm Standard-state reference pressure (1 atm)
Pfill Fill pressure
Phead Pressure at head wall
Pi Partial pressure of species i
Po,avg Time-averaged head wall pressure
Pr Prandtl number
Pspark Spark pressure
Pvn von Neumann pressure
Pwall Interal gauge wall pressure
p Pressure
Q’’’ Wall heat loss per unit volume
Qchem Rate of chemical energy input
Qx Heat flux in x-direction
Qy Heat flux in y-direction ''q& Heat flux per unit area
qn Rate of progress variable for reaction n

xxvi
R Mixture specific gas constant
Ri Specific gas constant of species i
Ru Universal gas constant
r Radial coordinate
s Mixture entropy per unit mass
S Mixture entropy per mole
Si0 Standard-state entropy of species i per unit volume
St Stanton number
si0 Standard-state entropy of species i per unit mass
T Temperature
Taw Adiabatic wall temperature
Ti Eigensystem variable for species i
Tref Reference temperature
Tsat Saturation temperature
Tvn von Neumann Temperature
t Time
tcycle Elapsed time from ignition until Pwall=Pamb
tl Elapsed local time since detonation passage
u Velocity component in x-direction
u’ Contravariant velocity component
V Volume
VCJ Chapman-Jouguet detonation velocity
v Specific volume
v Velocity component in y-direction
v’ Contravariant velocity component
v* Maximum diffusive coefficient
W Mixture molecular weight
Wi Molecular weight of species i
w Axial velocity in shock-fixed frame
X Non-dimensional measurement location (x/L)

xxvii
Xi Mole fraction of species i
[Xi] Concentration of species i
x Axial coordinate
xCJ Location of detonation front
xmeas Location of measurement station
Yi Mass fraction of species i
y Transverse coordinate (2-D), radial coordinate (axisymmetric)
Greek: αk Uncorrected weighting parameter for stencil k
α1:3 Coefficients for shear stress curve fit
β Length-to-diameter ratio (L/D)
βk Smoothness indicator for stencil k
βn Temperature exponent in rate constant for reaction n
γ Ratio of specific heats
γs Isentropic exponent
δ Condensation film thickness
δ& Condensation film growth rate
Δ1/2 Half-reaction length from ZND model
ε Non-singular weighting parameter
η Curvilinear coordinate
θ Cylindrical coordinate
κ Grid stretching parameter
λ Eigenvalue
μ Mixture dynamic viscosity
μi Dynamic viscosity of species i
νi,n’ Stoichiometric coefficient of reactant species i in reaction n
νi,n’’ Stoichiometric coefficient of product species i in reaction n
ξ Curvilinear coordinate (or) non-dimensional distance behind detonation
ξ* End of Taylor wave and start of stagnation region

xxviii
iω&
kω
π The number pi
ρ Mixture density
ρi Density of species i
τ Shear stress
τxx Viscous normal stress in x-direction
τxy Viscous shear stress
τyy Viscous normal stress in y-direction
Φ Stoichiometry
Φi Eigensystem variables for species i
φij Parameter used to construct mixture dynamic viscosity
φk Uncorrected weight for stencil k
χi Species i
ω Viscous exponent
Chemical production rate for species i
ωk Corrected weight for stencil k
Ideal weight for stencil k
Subscripts: a Adiabatic quantity
amb Ambient quantity
cond Condensation layer quantity
CJ Chapman-Jouguet quantity
i Species (or) node index
i+1/2 Inter-node surface
k Stencil index
e Freestream quantity
eq Equilibrium quantity
n Chemical reaction (or) time level index
p Characteristic field index
r Reference quantity

xxix
sat Saturation state
v Viscous quantity
w Wall quantity
1 Reactant state
2 Chapman-Jouguet state
3 Plateau state behind Taylor wave
Superscripts: T Transpose
+ Positive LLF flux
- Negative LLF flux
c Denotes quantity in characteristic field
n Time level
o Stagnation quantity ,, Per unit area ,,, Per unit volume
Abbreviations: C-D Converging-Diverging
CFL Courant-Friedrichs-Lewy
C-J Chapman-Jouguet
DDT Deflagration-to-Detonation Transition
ENO Essentially Non-Oscillatory
LLF Local-Lax-Fredrichs
ODE Ordinary Differential Equation
PDE Pulse Detonation Engine
Q1-D Quasi-one-Dimensional
WENO Weighted Essentially Non-Oscillatory
ZND Zeldovich-von Neumann-Doring
1/2/3-D One/Two/Three-Dimensional

xxx

1
Chapter 1: Introduction
1.1 Overview A series of experiments and numerical simulations are performed to advance
the understanding of flowfield phenomena and impulse generation in detonation tubes.
Experiments employing laser-based velocimetry, high-speed schlieren imaging and
pressure measurements are used to construct a dataset against which numerical models
can be validated. The numerical modeling culminates in the development of a two-
dimensional, multi-species, finite-rate-chemistry, parallel, Navier-Stokes solver. The
resulting model is specifically designed to assess unsteady, compressible, reacting
flowfields, and its utility for studying multidimensional detonation structure is
demonstrated. A reduced, quasi-one-dimensional model with source terms accounting
for wall losses is also developed for rapid parametric assessment. Using these
experimental and numerical tools, two primary objectives are pursued. The first
objective is to gain an understanding of how nozzles affect unsteady, detonation
flowfields and how they can be designed to maximize impulse in a detonation based
propulsion system called a pulse detonation engine. It is shown that unlike
conventional, steady-flow propulsion systems where converging-diverging nozzles
generate optimal performance, unsteady detonation tube performance during a single-
cycle is maximized using purely diverging nozzles. The second objective is to
identify the primary underlying mechanisms that cause velocity and pressure
measurements to deviate from idealized theory. An investigation of the influence of

2
non-ideal losses including wall heat transfer, friction and condensation leads to the
development of improved models that reconcile long-standing discrepancies between
predicted and measured detonation tube performance. It is demonstrated for the first
time that wall condensation of water vapor in the combustion products can cause
significant deviations from ideal theory. Before pursuing these two objectives it is
necessary to give some background on detonation theory and an introduction to pulse
detonation engines, the application which motivates this work.
1.2 Detonation Fundamentals A detonation wave consists of a propagating shock front and a closely coupled
reaction zone. As the detonation wave moves through a mixture the shock front
compresses and heats the reactants until they combust. The resulting chemical energy
release in turn sustains the motion of the shock front. Thus, a detonation wave is
comprised of the coupled interaction of a hydrodynamic process (shock compression)
with a thermochemical process (combustion). In this section a concise summary will
be given on the detonation theory relevant to the objectives of this thesis. The reader
is referred to Fickett and Davis (2001) for a comprehensive treatment of this broad
topic.
1.2.1 Chapman-Jouguet Theory In order to construct the simplest possible model of a detonation wave consider
a reference frame attached to the leading shock front. In this frame the gas flows from
right to left entering the wave at velocity w1 and leaving the wave at velocity w2.
Since the velocity of the combustion wave in the laboratory frame is Vw, it follows that
w1=Vw. In this shock-fixed reference frame an unsteady problem is transformed into a
steady one as illustrated in Figure 1.1.

3
By assuming spatially-uniform, 1-D flow on each side of the wave front and
neglecting diffusive transport processes, the conservation of mass, momentum and
energy in the shock-fixed frame take on very simple forms:
2211 ww ρρ = (1.1)
2
2221
211 PwPw +=+ ρρ (1.2)
22
22
2
21
1whwh +=+ (1.3)
Equations 1.1-1.3 are closed with the ideal-gas equation of state and represent
the same system of equations that is used to derive non-reactive, normal-shock, jump-
conditions. The principle difference for the detonation problem is that both the
sensible and chemical contributions to the enthalpy change as the gas passes from the
unburned state (1) to the burned state (2). In the non-reactive normal shock problem
only the sensible enthalpy changes across the wave front and there is no chemical
energy release. A more rigorous definition of the mixture enthalpy (h) will be given
in the next chapter.
By combining the continuity and momentum equations the Rayleigh line is
obtained which relates changes in pressure and specific volume to the mass flux
through the wave front as shown in Equation 1.4. Since w1=Vw it is also clear that the
slope of the Rayleigh line in pressure-specific volume (P-v) coordinates is
proportional to the square of the wave speed.
ρ1, w1, h1ρ2, w2, h2
Vw=w1
ρ1, w1, h1ρ2, w2, h2
Vw=w1
Figure 1.1 Detonation propagation with w denoting the shock-fixed frame velocities and Vw detonating the laboratory frame wave velocity.

4
( ) 2''211
12
12
vvmwPP&−=−=
−− ρ (Rayleigh Line) (1.4)
Similarly, by combing all three conservation laws the Rankine-Hugoniot is formed,
providing the necessary link between enthalpy, pressure and specific volume:
( )2112
12 vv21
+=−−
PPhh (Rankine-Hugoniot) (1.5)
The solution of the governing conservation equations is given by the intersection of
the Rayleigh-Line and the Rankine-Hugoniot in the pressure-specific volume plane as
illustrated in Figure 1.2.
Since the mass flux into the wave is necessarily positive, the Rayleigh line
reveals it is not possible for the pressure and specific volume behind the wave to
simultaneously increase or decrease. If the pressure increases the specific volume
must decrease and vice-versa. Consequently, solutions can only exist in two quadrants
of the P-v plane. The upper-left quadrant corresponds to compression waves and
these are designated detonations. Detonation waves propagate at supersonic velocities
P
v
P1
v1
Increasing chemical energy release
CJupper
CJlower
Flames
Det
onat
ions
P
v
P1
v1
Increasing chemical energy release
CJupper
CJlower
Flames
Det
onat
ions
Figure 1.2 Rayleigh lines (blue) and Rankine-Hugoniot curve (red) in P-v plane. Tangency points define Chapman-Jouguet (C-J) state.

5
and the burned products move in the direction of the wave when viewed in laboratory
coordinates. The lower-right quadrant corresponds to expansion waves and these are
designated flames or deflagrations. Flames speeds are subsonic and the burned
products move in the opposite direction as the wave front in laboratory coordinates.
Since the absolute value of the slope of the Rayleigh line in the P-v plane is
proportional to the square of the wave speed it follows that steep lines correspond to
high wave velocities. Thus, it is clear graphically in Figure 1.2 that detonations
propagate at very high velocities and flames propagate at much slower velocities.
For the non-reactive, normal shock wave there is no chemical energy release
and the Rankine-Hugoniot intersects the origin at v1 and P1. The addition of chemical
energy behind the wave shifts the Hugoniot curve away from the origin in the
direction indicated in Figure 1.2. As the Hugoniot is shifted away from the origin
there are initially two points of intersection in the both the detonation and flame
quadrants corresponding to weak and strong detonations and deflagrations,
respectively [Turns (2000)]. A unique solution in each quadrant is only obtained
when the Hugoniot has been shifted sufficiently far so that it is tangent with the
Raleigh line at a single point in each quadrant. The point of tangency in the
detonation quadrant corresponds to the upper Chapman-Jouguet (C-J) point, and the
point of tangency in the flame quadrant is the lower C-J point [Chapman (1899)]. For
a given Hugoniot curve, the upper C-J point represents the minimum wave velocity
since a further reduction in mass flux through the wave front would cause the
Rayleigh line not to intersect the Hugoniot. Similarly, the lower C-J point corresponds
to the maximum flame velocity. It is also possible to show the burned gas velocity
(w2) at the upper C-J point is equal to the sonic velocity [Bowman (2003)]. In
practice, the solution state at the upper C-J point is determined iteratively using a
chemical equilibrium solver with realistic thermodynamic data [Reynolds (1986),
Gordon and McBride (1994)].
Experiments in large diameter tubes, where the effects of wall losses are
minimized, have revealed that C-J detonation theory is in excellent agreement with
measurements of the wave speed and burned gas state immediately behind the wave.

6
The wave speed associated with the upper C-J point is typically within a few percent
of the experimentally determined value. This result demonstrates that detonation
wave speeds are largely insensitive to diffusive transport effects since these were
neglected in the purely convective model equations. Unlike detonations, flames
propagate at much slower velocities and consequently diffusive and convective
transport mechanisms are both important. Thus for flames, the model equations
presented here are not sufficient to determine wave speeds consistent with
experimental measurements.
1.2.2 ZND Theory A more sophisticated detonation model is constructed by utilizing the same 1-
D, steady, inviscid assumptions from C-J theory, except allowing for spatially varying
properties and non-equilibrium chemistry behind the detonation front. The governing
equations in this case are the 1-D, steady, reactive Euler equations. This framework
was conceived independently by Zeldovich [1940], von Neumann [1949], and Doring
[1943] and is commonly referred to as the ZND model. Since shock thicknesses are
on the order of a few molecular mean-free-paths, the characteristic time for a molecule
to pass through the shock wave is measured in nanoseconds. On the other hand, the
characteristic time scales governing gas-phase chemical reactions are typically
measured in microseconds [Bowman (2003)]. Consequently, the reactants are
compressed and heated through the extremely thin shock front before they undergo
chemical reaction.
Reactants in the post-shock, pre-ignition region are said to be in the von
Neumann state. This state is characterized by extremely high pressures and
temperatures sufficiently high to initiate chemical reaction. An example calculation
for stoichiometric H2-O2 reactants at 1 atm was constructed using the tools described
by Browne and Shepherd (2005) and is shown in Figure 1.3. The GRI-3.0 mechanism
was used to model the chemistry [Smith et al. (2000)].

7
On the left side of Figure 1.3 the pressure and temperature are plotted versus
distance behind the shock front (x=0). The von Neumann pressure (Pvn) and
temperature (Tvn) are 33 atm and 1769 K, respectively. After an ignition delay period,
chain-branching reactions commence and radicals begin to accumulate. As these
radicals recombine into more stable products (i.e. H2O), chemical energy is released
and the temperature rises relative to Tvn. At the same time the pressure and density of
the mixture decreases due to gasdynamic expansion. It is this expansion process that
sustains the motion of the leading shock front. Further behind the wave a state of
chemical equilibrium is achieved and the flowfield properties asymptote to those
predicted by C-J theory. The burned gas velocity also becomes choked relative to the
shock front at the C-J plane.
The ZND half-reaction length is denoted on the right side of Figure 1.3 by Δ1/2.
This chemical induction length is defined as the point in the reaction zone at which the
fuel mole fraction drops to half of its equilibrium value at the C-J plane. This
induction length will be an important parameter in determining the grid resolution
requirements for the multidimensional, detonation structure simulations in Chapter 5.
For typical fuel-oxygen mixtures starting at atmospheric pressure and temperature,
Δ1/2 is on the order of tens of microns.
0 50 100 150 200 250 30020
22
24
26
28
30
32
34
36
Tvn
Presssure Temperature
Distance (μm)
Pre
ssur
e (a
tm)
Pvn
1500
2000
2500
3000
3500
4000
Tem
pera
ture
(K)
Figure 1.3 ZND reaction zone structure for stoichiometric H2-O2 at P1=1 atm, T1=298 K. The GRI 3.0 chemical kinetic mechanism is used [Smith et al. (2000)].
0 50 100 150 200 250 3000.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Mol
e Fr
actio
n
Distance (μm)
H2 O2 H2O OH H O
Δ1/2

8
1.2.3 Taylor Wave In both the C-J and ZND theories it was possible to choose a shock-fixed
reference frame in order to convert an unsteady problem into a steady one. In typical
experiments, detonations are initiated near a closed end-wall and then propagate
towards the opposite end of the facility. Since the axial velocity is necessarily zero at
the closed end-wall, an unsteady expansion wave must exist between the wall and the
detonation front in order to satisfy the stagnation boundary condition. Unfortunately
for this case, there is no choice of reference frame in which the problem becomes
steady. The resulting unsteady flowfield can be broken down into three separate
regions as illustrated in space-time (x-t) diagram below.
In order to derive the desired self-similar solution the characteristic relations
for 1-D, inviscid, isentropic flow are invoked. The isentropic assumption is satisfied
provided the flow remains in chemical equilibrium (or freezes) through the Taylor
wave. Chemical equilibrium turns out to be an excellent assumption for the fuel-
oxygen mixtures investigated in this study at atmospheric pressure [Mattison et al
Figure 1.4 Space-time (x-t) diagram of detonation propagating away from closed end wall. State 1 consists of unburned reactants, state 2 is the C-J state and state 3 corresponds to the stagnation region behind the Taylor wave.
Taylor wave
t
x
Particle path
C- characteristic
C+ characteristic
Detonation front1
3
2
Taylor wave
t
x
Particle path
C- characteristic
C+ characteristic
Detonation front1
3
2

9
(2005)]. Along the C- characteristic wave the Riemann invariant [u-2a/(γs-1)] is
conserved and can be used to relate the sound speed in the stagnation region (a3) to the
fluid state at the C-J plane (uCJ, aCJ). Additionally, since the C+ characteristics are
straight lines originating at the origin (x=0,t=0), it follows that dx/dt=u+c=x/t within
the Taylor wave. Using these relations the sound speed and fluid velocity within the
Taylor wave can be uniquely determined in terms of the non-dimensional distance (ξ)
behind the wave front:
CJxx
−= 1ξ (1.6)
( )CJ
CJs
Vu
21* +
=γξ (1.7)
( ) ( )( ) CJCJ
s
s aVa ++−
−= ξγγξ
11 *0 ξξ ≤≤ (1.8)
( ) ( ) CJCJs
uVu ++
−= ξγ
ξ1
2 *0 ξξ ≤≤ (1.9)
The equations above are often presented in different forms and the reader is
referred to Du et. al (1982) or Wintenberger et al. (2003) for additional details. Here,
ξ=0 corresponds to the C-J state, ξ = ξ* corresponds to end of the Taylor wave and ξ=1
corresponds to the closed end wall. As mentioned previously, the C-J plane is choked
with respect to the wave front and thus VCJ=uCJ+aCJ. The isentropic exponent γs is
assumed constant through the Taylor wave, and is defined using the equilibrium sound
speed at the C-J state [i.e. γs=(a2/(RT))|CJ]. An approximation of the flowfield in
which the chemistry is frozen can be obtained by using the ratio of specific heats
[γ=(Cp/Cv)|CJ] in place of γs. The use of γ rather than γs is rarely appropriate for fuel-
oxygen mixtures. In Chapter 5 it will be shown that even for an extremely low
pressure (P1=6.67 kPa) H2-O2 mixture, equilibrium is achieved in the Taylor wave
almost immediately after initiation. It should also be mentioned that the von Neumann
state has been neglected in this analysis since, as was evident in Figure 1.3, the C-J
state is typically realized a very short distance behind the shock front. This reaction
zone thickness is often negligible relative to the length scale of interest (i.e. L).

10
As evident from the form of Equations 1.8 and 1.9, both the sound speed and
velocity decrease linearly from the C-J state through the Taylor wave. It should be
noted that u is the laboratory frame velocity and not the shock-fixed frame velocity.
Since the sound speed is known throughout the Taylor wave, standard isentropic
formulas can be used to construct the pressure, temperature, and density variation:
( )1
2−
⎟⎟⎠
⎞⎜⎜⎝
⎛=
s
s
CJCJ a
aPPγ
γ
ξ , ( )2
⎟⎟⎠
⎞⎜⎜⎝
⎛=
CJCJ a
aTT ξ , ( )1
2−
⎟⎟⎠
⎞⎜⎜⎝
⎛=
s
CJCJ a
a γρξρ (1.10-1.12)
As before, Equations 1.10-1.12 are valid in the range 0 ≤ ξ ≤ ξ*. Since the
plateau region (ξ > ξ*) is spatially uniform, the flowfield properties in this region are
the same as those at the end of the Taylor wave (ξ*). The value of the pressure at the
end of the Taylor wave (P3) is of particular interest since this is primary impulse
generation mechanism when using detonation waves for propulsive purposes. This
pressure is commonly referred to as head pressure, plateau pressure or P3 and is given
by P(ξ*):
( ) ( ) 12
*3 1
21 −
⎥⎦
⎤⎢⎣
⎡+
−==
s
s
CJ
CJsCJ a
uPPP
γγ
γξ (1.13)
Using Equations 1.9-1.12 the flowfield properties behind the P1=1 atm,
T1=298, stoichiometric H2-O2 detonation considered in the last section are plotted in
Figure 1.5. The C-J wave velocity (VCJ), Mach number (MCJ) and isentropic exponent
(γs) for this mixture are 2842 m/s, 5.3 and 1.13, respectively. As evident, the Taylor
wave and the plateau region each occupy approximately half of the post-detonation
flowfield. For a wide range of conditions uCJ ≈ VCJ/2 and thus Equation 1.7 reveals
that ξ* ≈ 1/2 is typical. A distinguishing feature of detonations is a large PCJ/P1 ratio,
which is ~19 for this case. The utilization of this large compression ratio for
propulsive purposes is one of the motivations for exploring pulse detonation engine
(PDE) technology.

11
1.2.4 Multidimensional Detonation Structure All of the theory presented thus far has been formulated in 1-D. In reality,
detonation waves are highly complex 3-D phenomena. Due the high sensitivity of the
reaction kinetics, small transverse temperature perturbations in the reaction zone lead
to the formation of compression waves propagating perpendicular to the motion of the
detonation front. The collision of two transverse waves distorts the nominally planar
shock front causing it to bulge outwards towards the unburned reactants. Detonations
can even exhibit spinning phenomena under certain conditions when confined in tubes
[Fickett and Davis (2001)]. Despite these complexities, 1-D theories like those
discussed above, have shown great utility in quantitatively predicting the wave speed
and burned gas state behind the reaction zone. One-dimensional modeling will be
used extensively throughout this work and in Chapter 5 a side-by-side comparison will
Figure 1.5 Taylor wave profiles for P1=1 atm, T1=298, stoichiometric H2-O2.
-0.2 0.0 0.2 0.4 0.6 0.8 1.00
2
4
6
8
10
12
14
16
18
20
Pres
sure
(atm
)
ξ
-0.2 0.0 0.2 0.4 0.6 0.8 1.00
500
1000
1500
2000
2500
3000
3500
4000
Tem
pera
ture
(K)
ξ
-0.2 0.0 0.2 0.4 0.6 0.8 1.00.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Den
sity
(kg/
m3 )
ξ
-0.2 0.0 0.2 0.4 0.6 0.8 1.0
0
200
400
600
800
1000
1200
1400
Lab
Fram
e Ve
loci
ty (m
/s)
ξ
VCJ
VCJVCJ
VCJ
PCJ
P3
TCJT3
ρCJ
ρ3
uCJ
u3
-0.2 0.0 0.2 0.4 0.6 0.8 1.00
2
4
6
8
10
12
14
16
18
20
Pres
sure
(atm
)
ξ
-0.2 0.0 0.2 0.4 0.6 0.8 1.00
500
1000
1500
2000
2500
3000
3500
4000
Tem
pera
ture
(K)
ξ
-0.2 0.0 0.2 0.4 0.6 0.8 1.00.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Den
sity
(kg/
m3 )
ξ
-0.2 0.0 0.2 0.4 0.6 0.8 1.0
0
200
400
600
800
1000
1200
1400
Lab
Fram
e Ve
loci
ty (m
/s)
ξ
VCJVCJ
VCJVCJVCJVCJ
VCJVCJ
PCJ
P3
TCJT3
ρCJ
ρ3
uCJ
u3

12
be made between 1-D and 2-D simulation results. A more detailed discussion of
detonation structure will also be given in Chapter 5.
1.3 Pulse Detonation Engines The primary motivation and funding for the current work comes from recently
renewed interest in using intermittent (pulsed) detonation waves as the combustion
mechanism in a propulsion system. The concept of pulsed propulsion dates back to
World War II and the development of the German V-1 ‘buzz bomb’. In this device a
shutter-like valve at the front of the engine opens admitting air that subsequently
mixes with injected fuel. The valve then closes and the fuel-air mixture is ignited and
exhausted out the rear of the engine. Thrust is primarily generated by the burned gas
pressure acting on the closed inlet valve. Although V-1 engineers intended to use
detonative combustion, high-speed deflagrations were achieved instead [Kelly
(2003)].
As the name implies, pulsed detonation engines (PDE) utilize detonations
rather than deflagrations. Detonations propagate at thousands of meters per second,
which is three orders of magnitude faster than typical flame speeds. Since the
combustion wave consumes the reactants so rapidly, the process occurs at nearly
constant volume. It can be shown that the thermodynamic efficiency of a constant
volume combustion process is higher than the constant pressure process occurring in
existing aero-propulsion systems (i.e. ramjets or turbojets) [Wintenberger (2004)].
Additionally, detonative cycles have the benefit of being able to generate very high
thrust levels even for low reactant fill pressures due to the high PCJ/P1 ratio
characteristic of detonation waves. Also, since the cycle is intermittent, the reactants
can be injected during the low pressure phase of the cycle, removing the need for a
high pressure injection system which significantly decreases the mechanical
complexity of the system. Despite these theoretical advantages, much work remains
to be done before a flight-ready system with demonstrated performance advantages
over existing technology is realized.

13
Pulse detonation engines come in many different forms. They can be air-
breathing or rocket based, single-tube or multi-tube, valveless [Brophy et. al (2003)]
or valved [Bussing and Pappas (1996)] and they can use either gaseous or liquid fuels.
There is also a current effort aimed at assessing the viability of replacing the
combustor of a conventional gas-turbine with a detonation tube [Rasheed et al.
(2004)]. Other potential applications include cruise missiles [Kelly (2003)]. The
current goal is to develop an air-breathing, multi-tube system that operates at ~100 Hz
pulse rates using liquid hydrocarbon fuels. To realize this goal the fundamental
operation and performance of much simpler detonation tubes, like that illustrated in
Figure 1.6, needs to be characterized first.
In this work a single-tube, single-pulse, gaseous, fuel-oxygen PDE is
considered. Due to the simplicity of this configuration the term detonation tube will
often be used in place of the term PDE. A single-cycle for such a configuration is
illustrated in Figure 1.6. The facility consists of a tube that is closed at one end and
open at the other. During the first stage of the cycle a premixed fuel-oxygen mixture
is admitted to the engine through an open valve located in the head wall. After the
reactants have completely filled the tube volume, the second stage of the cycle
Figure 1.6 Single-Pulse PDE operating cycle.
reactants air
reactants
VCJproducts
products
pres
sure
x/L
1. Filling of fuel/oxidizer
2. Ignition
3. Detonation propagation
4. Blowdown
reactants air
reactants
VCJproducts
products
reactants airreactants air
reactantsreactants
VCJproducts VCJproducts
productsproducts
pres
sure
x/Lx/L
1. Filling of fuel/oxidizer
2. Ignition
3. Detonation propagation
4. Blowdown

14
commences with the ignition of the mixture at the closed end-wall. After a transition
event, referred to as deflagration-to-detonation transition (DDT), a self-sustaining
detonation wave is formed that propagates towards the tube exit. Behind the
detonation the hot burned gases expand through the Taylor wave into the stagnant
plateau region. For the nozzle-less geometry illustrated here, it is the head pressure
(P3) in the plateau region that accounts for the bulk of the delivered impulse. When
the detonation reaches the exit of the tube it diffracts out into the ambient
environment. For most fuel-oxygen combinations (other than H2-O2) a reflected
expansion wave is generated at the exit boundary [Wintenberger et al. (2002)]. During
blowdown this expansion wave moves back towards the closed end wall decreasing
the pressure and accelerating the gasses towards the tube exit. After a sufficient time
elapses (~10L/VCJ) the pressure in the tube equilibrates with the ambient environment
and the net thrust decays to zero.
Typically the ignition mechanism is too weak to directly form a detonation
wave. This is particularly true for less sensitive fuel-air mixtures and multiphase
reactants. Consequently, the weak spark initially generates a flame (deflagration)
which propagates spherically from the point of initiation. Small acoustical
perturbations generated by the ignition event reflect off the inside walls of the tube
and interact with the flame surface. These interactions, in addition to turbulent
fluctuations, cause the flame surface to wrinkle and a corresponding increase in the
burning surface area. As the flame front accelerates and interacts with the walls of the
tube conditions are eventually established which lead to the formation of a detonation
wave. The underlying mechanisms for deflagration-to-detonation transition (DDT)
are still not fully understood and this remains an active area of research. Thus, it is
commonly assumed in detonation modeling that the detonation forms instantaneously
after ignition.
The objective in this work is to develop a fundamental understanding of the
simple, single-cycle device depicted in Figure 1.6. The understanding developed in
this environment can then be extended to more complex engine configurations. In
order to maximize detonation tube performance the use of nozzles will be

15
experimentally and numerically investigated. Additionally, the influence of non-ideal,
wall losses will be assessed so that design choices can be implemented to minimize
associated performance penalties.
1.4 Thesis Outline Chapter 1 outlines the two primary objectives of this work which in brief are to
assess (1) the impact of nozzles and (2) wall losses on the performance of single-cycle
detonation tube. To support the discussion in the remaining chapters a concise
overview of the relevant aspects of detonation theory is given. The reader is also
introduced to pulse detonation engines, the application which motivates the present
study.
Chapter 2 documents the development of a multidimensional, multi-species,
reacting Navier-Stokes model. A simplified, Q1-D version of the model will also be
presented. The governing equations will be outlined followed by the numerical
methods used to solve them. This numerical tool was custom-developed by the author
to solve general, unsteady, compressible, reacting flowfields. It incorporates realistic
temperature-dependent thermodynamic and transport properties and uses a robust
shock-capturing method. In this work it will be used to investigate detonation tube
flowfields and performance.
Chapter 3 presents measurements of burned gas velocity in a detonation tube
with and without a converging-diverging nozzle. The burned gas velocity sensor is
based on a time-of-flight absorption measurement of seeded Cesium. Experimental
results are compared to Q1-D simulations using either frozen or finite-rate-chemistry
and the effects of wall heat loss are addressed.
Chapter 4 contains a numerical and experimental investigation of the influence
of nozzles on detonation tube performance. Guided by results from Q1-D modeling,
criteria are proposed for evaluating optimal area ratios in unsteady nozzles. Using the
developed criteria, purely diverging and converging-diverging nozzle sections are
fabricated and tested. Impulse measurements are made to assess which geometry

16
delivers the highest performance and high-speed schlieren imaging is used to capture
the nozzle flowfield throughout blowdown.
Chapter 5 presents a brief discussion on multidimensional detonation structure.
The multidimensional model from Chapter 2 is used to simulate both regular and
highly-irregular cellular structures in low-pressure H2-O2 mixtures. It is shown that
discrepancies between measured and simulated impulse cannot be accounted for by
including realistic detonation structure into models.
Chapter 6 provides a detailed examination of the influence of wall losses on
detonation tube performance. Using the complete Navier-Stokes model, wall heat flux
and shear stress are directly computed behind the detonation wave for the same low
pressure H2-O2 mixture considered in Chapter 5. These results provide a benchmark
against which more efficient 1-D heat loss and friction models can be formulated.
Using this benchmark, a new 1-D model is proposed which accounts for convective
and conductive heat loss in addition to wall shear stress. Experiments in small
diameter, large L/D detonation tubes indicate that wall heat transfer and shear stress
alone are not sufficient to account for observed trends in pressure measurements.
Condensation is proposed as an additional loss mechanism and heated wall
experiments in combination with an approximate 1-D condensation model
demonstrate the importance of this previously neglected effect.
Chapter 7 summarizes the major contributions presented from each chapter.
Suggestions for areas of future work are also given. The first two appendices of this
thesis contain material needed in the construction of the numerical model. The third
appendix discusses the multidimensional flowfield structures that evolve after non-
direct detonation initiation near a closed end wall. The material in this last appendix
supports the discussion surrounding the schlieren images presented in Chapter 4.

17
Chapter 2: Numerical Modeling
2.1 Introduction In order to gain a deeper understanding of detonation tube phenomena and to
aid in the analysis of experimental data, a detailed numerical model was constructed.
The custom-developed model solves several different forms of the governing
conservation equations and can be used on both Cartesian and curvilinear grids. The
most complete version of the model solves the 2-D (or axisymmetric), chemically-
reacting Navier-Stokes equations. A reduced, Q1-D, inviscid, form of the model with
source terms for wall losses is also presented and used frequently throughout this
work. In both models the fluid dynamic equations are supplemented by equations
describing the chemical reaction of a multi-species gas mixture. Chemical reaction
mechanisms containing an arbitrary number of species and elementary reactions can
be easily incorporated, and realistic, temperature-dependent thermodynamic and
transport properties are used. Existing numerical methods from the literature have
been combined to form a robust solver targeted at unsteady, compressible, chemically
reacting flowfields that contain shock waves and other discontinuities. The resulting
model runs efficiently in parallel on distributed memory computer clusters by using
the Message-Passing-Interface (MPI) standard. The objective of the current chapter is
to present the governing equations, numerical methods and implementation details
used in the construction of the model.

18
2.2 Governing Equations – Cartesian Coordinates
The most complete model equations used in this study are the two-dimensional
(2-D) or axisymmetric, chemically reacting Navier-Stokes equations, as shown below
in Cartesian coordinates:
SHHGFGFUv
vv +++∂
∂+
∂∂
=∂∂
+∂∂
+∂∂
yxyxt (2.1)
Here U is the state vector which consists of a mass conservation term for each
of the ns species, a momentum term for each of the two coordinate directions, and a
total energy term. The F and G vectors represent the convective fluxes, while the Fv
and Gv vectors describe the diffusive fluxes. The H and Hv vectors are axisymmetric
source terms for the convective and diffusive fluxes, respectively. The last source
term on the right-hand-side, S accounts for the chemical production rate of each
species during combustion. Each of the aforementioned terms is documented below
with m=0 describing two-dimensional plane flow and m=1 corresponding to
axisymmetric flow:
[ ]Tns EvuYY ,,,,,1 ρρρρ L=U (2.2)
( )[ ]Tns upEuvpuuYuY ++= ,,,,, 21 ρρρρ LF (2.3)
( )[ ]Tns vpEpvuvvYvY ++= ,,,,, 21 ρρρρ LG (2.4)
T
xxyxxxyxxns
ns Qvux
YDxYD ⎥⎦
⎤⎢⎣⎡ ++
∂∂
∂∂
= ττττρρ ,,,,,11 LvF (2.5)
T
yyyxyyyxyns
ns Qvuy
YDyYD ⎥
⎦
⎤⎢⎣
⎡++
∂∂
∂∂
= ττττρρ ,,,,,11 LvG (2.6)
( )[ ]Tns vpEvuvvYvYym
+−
= ,,,,, 21 ρρρρ LH (2.7)
T
yyyxyyyxyns
ns Qvuy
YDyYD
ym
⎥⎦
⎤⎢⎣
⎡++−
∂∂
∂∂
= τττττρρ θθ ,,,,,11 LvH (2.8)
[ ]TnsnsWW 0,0,0,,,11 ωω &L&=S (2.9)

19
A simplified form of the equation set above can be obtained by neglecting
diffusive transport and assuming quasi-one-dimensional (Q1-D) flow. The Q1-D,
reacting Euler equations are given by:
( )OSQFU++=
∂∂
+∂
∂ AxA
tA (2.10)
In Equation 2.10, A represents the cross-sectional area and is assumed to be a
function of the axial coordinate only. The state, flux and chemical source term vectors
are the same as given above, except that the transverse momentum equation is
neglected. Thus, the vectors have ns+2 rather than ns+3 entries. The Q1-D source
term Q is given by:
]0,,0,,0[dxdA
Ap
L=Q (2.11)
The vector O is used to implement additional source terms accounting for wall
heat transfer, shear and mass transport phenomena. The particular form of these
source terms will be addressed extensively in Chapter 6. The simplified, Q1-D form
of the governing equations will be used extensively in this thesis to circumvent the
computational expense of solving the multidimensional, reacting, Navier-Stokes
equations.
As evident, the governing equations described above are not Reynolds-
averaged and do not include a subgrid-scale turbulence model. Consequently,
turbulent effects which are not resolved directly will not be captured by the model.
Since the multidimensional Navier-Stokes form of the governing equations will only
be applied to low Reynolds number flows (see Chapter 6) the errors associated with
the neglect of subgrid-scale phenomena are expected to be minimized. The variables
used in the conservation equations above are discussed in greater detail below.

20
2.2.1 Equation of State & Thermodynamic Variables
The conservation equations described above are supplemented with an
equation of state for a mixture of thermally perfect gases:
∑ ∑= =
===ns
i
ns
iiii RTTRpp
1 1ρρ (2.12)
∑∑==
==ns
iii
ns
i i
iu RY
WYRR
11 (2.13)
The mixture molecular weight, species mass fraction, mole fraction and concentration
are given by:
1
1 1
−
= =∑ ∑ ⎥⎦
⎤⎢⎣⎡==
ns
i
ns
iiiii WYWXW (2.14)
ρρi
iY = (2.15)
i
ii W
WYX = (2.16)
[ ]i
ii W
YX ρ= (2.17)
The total energy per unit volume and mixture enthalpy per unit mass is given by:
( )
⎟⎟⎠
⎞⎜⎜⎝
⎛+
++−= hvupE
2
22
ρ (2.18)
( )∑ ∫=
+=ns
i
T
T pf
iiref
dchYh1
εε (2.19)
In Equation 2.19, ε is used as a dummy-variable of integration. The temperature of the
gas mixture can be written implicitly as:
( ) ( )
( )ThCCRY
ThvuET
ns
iii
21
1
22
2 +=⎟⎠
⎞⎜⎝
⎛
++
+−=
∑=
ρ
ρρ
(2.20)

21
Equation 2.20 is typically solved using a Newton-Raphson iteration [Fedkiw
(1997)]. Since the Newton-Raphson iteration is not guaranteed to converge, a second
(albeit slower) technique such as bisection, which is guaranteed to converge, can be
used if some error criteria is not met after a preset iteration limit. Thermodynamic
properties for each species are given in terms of temperature dependent polynomial
fits of the specific heat at constant pressure, as used in the NASA Chemical
Equilibrium Code (CEA) [Gordon and McBride (1994)]:
∑=
++++=ns
iiiiiiiip TaTaTaTaaRc
1
45
34
2321, (2.21)
Ta
Ta
Ta
Ta
Ta
aTRdTch iiT
T
iiins
iiiipi
ref
64534232
11, 5432
+++++== ∫ ∑=
(2.22)
iiT
T
iii
ns
iii
ipi aT
aT
aT
aTaTaRdT
Tc
sref
7453423
21
1,0
432ln +++++== ∫ ∑
=
(2.23)
Equations 2.21-2.23 are given per unit mass, although they can be easily
expressed in molar units by multiplying though by the species molecular weight (Wi).
The corresponding molar quantities are Cp,i, Hi and Si0. The molar enthalpies (Hi) and
standard-state entropies (Si0) will later be used to express the equilibrium constants.
The standard-state entropy term in Equation 2.23 retains its superscript because this
equation is only valid at constant pressure (P=1 atm). Since perfect gas behavior is
assumed, the specific heats and enthalpies are only functions of temperature and thus
the standard-state and actual values are identical. Consequently, the mixture-averaged
specific heats and enthalpy take on simple forms:
∑=
=ns
iipip cYc
1, (2.24)
∑=
=−=ns
iiviiipv cYRcc
1,, (2.25)
∑=
=ns
iiihYh
1 (2.26)

22
Since the mixture-averaged entropy is not just a function of temperature, it
must be defined accounting for the pressure and entropy of mixing terms. The
individual species entropies and mixture entropy in molar units are given by:
⎟⎟⎠
⎞⎜⎜⎝
⎛−−=
atmuiuii P
PRXRSS lnln0 (2.27)
∑=
=ns
iiiSXS
1
(2.28)
Here, Patm is the standard-state pressure of 1 atm. The corresponding quantity per unit
mass is given by:
WSs = (2.29)
2.2.2 Diffusive Transport Variables By including the Fv, Gv and Hv vectors in Equation 2.1 the effects of diffusive
transport are incorporated in the governing conservation equations and the resulting
equation set is typically referred to as the Navier-Stokes equations. If these diffusive
terms are neglected, then the resulting equation set is typically referred to as the Euler
equations. In the present section the diffusive terms required for the Navier-Stokes
formulation are defined. The components of the stress tensor and the heat flux vector
are given by:
⎟⎟⎠
⎞⎜⎜⎝
⎛−
∂∂
−∂∂
=y
mvyv
xu
xx 232 μτ (2.30)
⎟⎟⎠
⎞⎜⎜⎝
⎛−
∂∂
−∂∂
=y
mvxu
yv
yy 232 μτ (2.31)
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
=xv
yu
xy μτ (2.32)
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
−=xu
yv
yv2
32 μτθθ (2.33)

23
∑= ∂
∂+
∂∂
=ns
i
iiix x
YhDxTkQ
1ρ (2.34)
∑= ∂
∂+
∂∂
=ns
i
iiiy y
YhDyTkQ
1
ρ (2.35)
The mixture-averaged transport properties μ, k and Di are evaluated with the
aid of the CHEMKIN TRANSPORT Subroutine Library [Kee et al. (2006)] which
uses mixing rules involving the pure species and binary diffusion coefficients. The
individual species transport properties (μi,ki) and the binary diffusion coefficients (Dji)
are evaluated using temperature dependent curve fits to data predicted via kinetic
theory as discussed in [Kee et al. (2006)]. The mixture-averaged viscosity (μ) is given
in terms of the individual species viscosities μi= μi(T) by [Wilke (1950), Hirschfelder
et al. (1967)]:
∑∑=
=⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
=ns
ins
jijj
ii
X
X1
1φ
μμ (2.36)
2
41
21
21
118
1
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛+=
−
i
j
j
i
j
iij W
WWW
μμφ (2.37)
From Equation 2.36 it is apparent that the mixture-averaged viscosity (μ) is
uniquely determined by the temperature and chemical composition: μ=μ(T,Xi).
Similarly, the mixture-averaged thermal conductivity (k) can be expressed in terms of
the individual species conductivities ki=ki(T) as [Mathur et al. (1967)]:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+=
−
==∑∑
1
1121 ns
i i
ins
iii k
XkXk (2.38)
As before, the mixture-averaged conductivity (k) is uniquely determined by the
temperature and chemical composition: k=k(T,Xi). The diffusion of species i into the

24
mixture (Di) is given in terms of the binary diffusion coefficients Dji=Dji(T,p) as [Kee
et al. (2006)]:
∑≠
−=
ns
ij ji
j
ii
DXYD 1
(2.39)
In this case Di is uniquely determined by the temperature, pressure and chemical
composition: Di=Di(T,p,Xi). The effects of thermal diffusion are not considered in the
evaluation of the binary diffusion coefficients (Dji).
2.2.3 Chemical Reaction Variables
The chemical source term S is computed with the aid of a chemical reaction
mechanism which consists of a set of nr reversible (or irreversible) elementary
reactions of the form:
∑ ∑= =
⇔ns
i
ns
iiniini vv
1 1
'',
', χχ (n=1,…,nr) (2.40)
Here vi,n is an integer designating the stoichiometric coefficient of species χi on the
reactant and product sides of reaction n. The molar production rate of each species
can be evaluated by summing the rate-of-progress variable for each reaction involving
the species. The rate-of-progress variable (qn) for the nth reaction is given by the
difference between the forward and reverse rates as shown below.
( ) n
nr
nninii qvv∑
=
−=1
',
'',ω& (i=1,…,ns) (2.41)
[ ] [ ] '',
',
1,
1,
nini vi
ns
inr
ns
i
vinfn XkXkq ∏∏
==
−= (2.42)
The forward reaction rates (kf,n) are conventionally assumed to have an
Arrhenius temperature dependence expressed in terms of a pre-exponential factor (An),
temperature exponent (βn) and activation energy (En) for the nth reaction:

25
⎟⎟⎠
⎞⎜⎜⎝
⎛ −=
TRETAku
nnnf
n exp,β (2.43)
The reverse reaction rate constant (kr,n) can be expressed in similar form; however, the
equilibrium constants (Kc,n) are usually known to higher accuracy and thus kr,n is
conventionally obtained by evaluating:
nc
nfnr K
kk
,
,, = (2.44)
The equilibrium constant in concentration units (Kc,n) can alternatively be expressed
in pressure units (Kp,n) and evaluated from previously defined thermodynamic
variables.
( )∑
⎟⎟⎠
⎞⎜⎜⎝
⎛=
=
−ns
inini vv
u
atmnpnc TR
PKK1
',
'',
,, (2.45)
⎟⎟⎠
⎞⎜⎜⎝
⎛ Δ−
Δ=
TRH
RSK
u
n
u
nnp
0
, exp (2.46)
The entropy and enthalpy changes (Δ) in Equation 2.46 refer to the difference between
the product and reactant states in the nth reaction:
( )∑=
−=Δns
iininin SvvS
1
0',
'',
0 (2.47)
( )∑=
−=Δns
iininin HvvH
1
',
'', (2.48)
The expressions above can be conveniently implemented through the use of the
CHEMKIN GAS-PHASE Subroutine Library [Kee et al. (2006)]. Additional details
regarding the evaluation of chemical production rates for three-body and pressure
dependent reactions can be found in the same reference.

26
2.3 Governing Equations – Curvilinear Coordinates The geometries of the computational domains considered in this work are quite
simple. For the 2-D formulation rectangular geometries are considered, and the
axisymmetric formulation is used for tubes. Nevertheless, even on these simple
geometries, grid stretching is needed in Chapters 5 and 6 in order to efficiently resolve
reaction zone and boundary layer phenomena. Rather than modifying numerical
methods that were developed for use on uniformly spaced Cartesian grids; the strategy
taken here is to solve the governing equations in a curvilinear coordinate system where
grid uniformity is maintained. The conservation equations in curvilinear coordinates
are related to the conservation equations in Cartesian coordinates through geometrical
metrics as will be shown below. The variables ξ and η will be used to represent the
two curvilinear coordinate directions, and the values of these variables are assigned
according to the grid indices (i,j) where they are defined. Thus, at grid point (i,j) ξ =i
and η=j. It follows that the flux surfaces between adjacent grid points take on half
integer values (i.e. ξ=i+1/2 or η=j+1/2) and the distance between points is Δξ = Δη =
1. The resulting form of the Navier-Stokes equations in curvilinear coordinates is
given by:
SHHGFGFUv
vv ′+′+′+∂
′∂+
∂′∂
=∂
′∂+
∂′∂
+∂
′∂ηξηξt
(2.49)
The curvilinear vector terms are given in terms of the Cartesian vectors by:
UU 1−=′ J , HH 1−=′ J , vv HH 1−=′ J , SS 1−=′ J (2.50-2.53)
ηη ∂∂
−∂∂
=′ xy GFF , ηη ∂
∂−
∂∂
=′ xyvvv GFF (2.54-2.55)
ξξ ∂∂
+∂∂
−=′ xy GFG , ξξ ∂
∂+
∂∂
−=′ xyvvv GFG (2.56-2.57)
The grid transformation Jacobian and its inverse are given by:
xyyxJ
∂∂
∂∂
−∂∂
∂∂
=ηξηξ ,
ξηηξ ∂∂
∂∂
−∂∂
∂∂
=− yxyxJ 1 (2.58-2.59)

27
Additional details regarding the numerical implementation of the curvilinear form of
the governing equations is discussed in the next section and the reader is also referred
to MacCormack (1995).
2.4 Numerical Methods & Implementation In this section numerical methods will be presented which can be applied to
either the Cartesian or curvilinear form of the conservation equations. The objective is
to advance the known initial solution at time n (Un or U’n) to time level n+1. In order
to advance the solution in time the convective fluxes (F,G or F’,G’), diffusive fluxes
(Fv,Gv or Fv’,Gv
’), and source terms (H,Hv,S or H’,Hv’,S’) must be evaluated. In the
discussion to follow the construction of these terms as well as the method for temporal
integration will be addressed.
2.4.1 Time Integration
A time-step splitting strategy is utilized in order to efficiently integrate the
conservation equations. In this strategy Equation 2.1 is decomposed into two
equations: (1) Equation 2.60 which describes fluid convection and diffusion without
chemical reaction and (2) Equation 2.61 which describes the chemical reaction of a
motionless fluid. An identical splitting (not shown) is achieved in curvilinear
coordinates using Equation 2.49.
vvv HHGFGFU
++∂
∂+
∂∂
=∂∂
+∂∂
+∂∂
yxyxt (2.60)
SU=
dtd (2.61)
During a given time step, the solution vector (Un) is first advanced by Δt at
frozen chemical composition using an explicit time integration method on Equation
2.60. Next, using the updated solution from the previous step (Un+1/2) as the initial
condition, Equation 2.61 is implicitly integrated by Δt to form the solution vector Un+1.

28
The process is repeated at each time level. Naturally, the best coupling between the
fluid-dynamic and reaction steps is achieved as Δt→0. This time-step-splitting
strategy is originally attributed to Strang (1968) and has been used in several previous
reacting flow computations [Fedkiw (1997), Morris (2005a)]. Additional discussion
regarding the time integration methods for Equations 2.60 and 2.61 is given below.
All of the problems considered in this work are highly unsteady, and
consequently an explicit time-integration strategy has been selected for the fluid
dynamic step (Equation 2.60). The use of implicit schemes in unsteady, reacting flow
problems has been implemented successfully [i.e. Yungster and Radhakrishnan (1996,
1997)], however the gain in computational efficiency is certainly not as great as it is
for steady-state problems. Additionally, the programming simplicity and ease of
implementation on distributed-memory computer clusters is significantly greater for
the explicit formulation chosen here.
The method-of-lines approach is used to solve the fluid-dynamic step by first
discretizing all spatial derivatives. Using this technique, Equation 2.60 is reduced
from a system of partial differential equations into a semi-discrete system of ordinary
differential equations (ODE). This system can be solved using any one of the many
available ODE solvers. However, the third-order, total variation diminishing (TVD),
Runge-Kutta algorithm proposed by Gottlieb and Shu (1998) is recommended for use
in combination with the spatial discretization schemes to follow [Fedkiw (1997)]. The
proposed TVD scheme is summarized below:
( )UU Lt
=∂∂ (2.62)
( ) ( )nn tL UUU Δ+=1 (2.63)
( ) ( ) ( )( )112
41
41
43 UUUU tLn Δ++= (2.64)
( ) ( ) ( )( )221
32
32
31 UUUU tLnn Δ++=+ (2.65)

29
When the procedure above is to be followed by a chemical reaction step the
U(n+1) term in Equation 2.65 should actually be interpreted as the U(n+1/2) term from the
time-step-splitting procedure. The L(U) operator defined in Equation 2.62 is
constructed by moving all convective, diffusive and source terms to the right hand side
of equation 2.60.
Since an explicit time advancement scheme is used, the maximum allowable
time step is restricted by the Courant-Friedrichs-Lewy (CFL) condition. The
simulations in this work are nominally run at 0.8Δtmax where Δtmax is given in
Cartesian coordinates by [MacCormack (1995)]:
1
22*
22max121211
−
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛Δ
+ΔΔ
+Δ
+Δ
+Δ
+Δ
+Δ
=Δyyxx
vyx
cy
vx
ut (2.66)
⎥⎦
⎤⎢⎣
⎡= max
* ,,max Dckvv
ρμ (2.67)
In curvilinear coordinates Δtmax is given by [MacCormack (1995)]:
( ) 122*22
max 22−
⎥⎦⎤
⎢⎣⎡ +++++⋅+⋅=Δ VssssvsscVt ηηξξηξηξ sqsq (2.68)
yx iiq vu += , yxξ iis ηη
ηη
Δ∂∂
−Δ∂∂
=xy , yxη iis ξ
ξξ
ξΔ
∂∂
−Δ∂∂
=xy (2.69)
ηξηξηξ
ΔΔ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂∂
−∂∂
∂∂
=xyyxV (2.70)
The maximum allowable time step is evaluated at each node in the computational
mesh and the minimum Δtmax is set equal to Δt for the next time step.
The explicit time-advancement scheme discussed above is not suitable for
solving the stiff system of chemical reaction equations. The components of the
chemical source term (S), describing the creation (or destruction) rates of each
chemical species, can vary by several orders of magnitude. Consequently, the system
of differential equations described in 2.61 is very stiff and the numerical solution is a

30
challenging problem. The temporal integration of this stiff equation set is best
handled using an implicit, Backward Differentiation Formula (BDF) as implemented
in the freely available Variable-Coefficient ODE Solver (VODE) package [Brown et
al. (1989)]. This software package is employed in this work.
2.4.2 Convection Terms
Since the model will be used to simulate detonation waves the convection
terms must be handled using an appropriate shock capturing method. According to the
Lax-Wendroff theorem [Lax and Wendroff (1960)], the numerical scheme should be
conservative so that provided a converged solution is achieved, it will be the weak
solution of the governing conservation law. While conservative schemes are often
formulated in a finite-volume (FV) framework, a finite-difference (FD) approach will
be taken here since the FD version of the chosen numerical method is much more
efficient for multidimensional problems compared to the FV version [Shu (1997)].
Conservation is ensured in the FD approach by evaluating a single flux at the interface
between two adjacent cells as illustrated in Figure 2.1. In the absence of internal
sources or boundary fluxes this strategy preserves conservation over the computational
domain.
Figure 2.1 Computational grid with vertical dotted lines representing flux surfaces. The horizontal lines (k=0:3) denote the stencils used in the construction of the flux at the i+1/2 surface using the WENO-5M scheme.
i-2 i-1 i i+1 i+2 i+3
Δx or Δξ node
k=0:k=1:k=2:k=3:
21+iF '21+iFor
i-2 i-1 i i+1 i+2 i+3
Δx or Δξ node
k=0:k=1:k=2:k=3:
k=0:k=1:k=2:k=3:
21+iF '21+iFor21+iF '21+iFor

31
The objective is to evaluate Fi+1/2 (or F’i+1/2) at every flux surface and then use
the result to evaluate the convective derivative at each node:
xxii
i Δ−
≈∂∂ −+ 2121 FFF (Cartesian) (2.71)
ξξ Δ−
≈∂∂ −+
'21
'21
'ii
i
FFF (Curvilinear) (2.72)
It should be noted that fluxes constructed at the cell interfaces (i±1/2) are
defined to be approximations of the numerical flux function and not the actual
physical flux (see Appendix B). However, the numerical flux function and the
physical flux are equal to one another to second order accuracy [Osher et al. (2003)].
If Fi±1/2 were exactly equal to the numerical flux function, then Equations 2.71-2.72
would be exact rather than approximate. On the other hand, if Fi±1/2 were equal to the
actual flux then clearly the approximations in 2.71-2.72 would be second-order
accurate. By defining Fi±1/2 as an approximation of the numerical flux function,
schemes with higher than second-order accuracy can be formulated. The reader is
referred to the literature for additional discussion [Shu et al. (1989), Jiang and Shu
(1996), Henrick et al. (2005)].
The numerical method implemented in this work is the Weighted Essentially-
Non-Oscillatory Method (WENO) originally proposed by Liu et al. (1994) and later
modified by Jiang and Shu (1996) and Henrick et al. (2005). More specifically, this
work implements the fifth-order accurate WENO-5M method proposed by Henrick et
al. It should be noted that the chosen WENO-5M scheme only achieves a fifth-order
convergence rate on smooth flows that lack discontinuities and is at best first-order
convergent otherwise [Aslam (2001)]. This is the case for all higher-order shock
capturing methods. Nevertheless, the advantages of these schemes for flows
containing both discontinuities (i.e. shock waves) and complex solution features have
been demonstrated in the literature [Shi et al. (2003)].
The WENO-5M method works by constructing polynomial approximations of
the interface flux (f ki+1/2) using the nodal fluxes (fi) defined in three point stencils in

32
the vicinity of point i. In Figure 2.1, four such stencils are denoted by k=0:3. The flux
at the interface (fi+1/2) is constructed by taking a weighted average of the f ki+1/2. A
left-biased fi+1/2 can be constructed by using the k=0:2 stencils, and a right-biased fi+1/2
can be constructed by using the k=1:3 stencils. In smooth regions of the flow the
weights are designed so that a standard, fifth-order, finite-difference scheme is
recovered (see Appendix B). Near discontinuities, some stencils are likely to be
highly-oscillatory, and the weights of these stencils are minimized to suppress their
contribution to the average. In this fashion the scheme maintains high-order accuracy
in smooth regions and retains essentially non-oscillatory behavior near shock waves.
In the development of the WENO scheme it is assumed that the computational
mesh is uniformly spaced. Thus, to use WENO on a non-uniform grid a smooth
mapping must exist between the non-uniform (x,y) space and the uniform (ξ,η) space.
In the uniform (ξ,η) space the WENO scheme is applied to F’i+1/2 rather than Fi+1/2. In
this work an analytical transformation will be used to relate the non-uniform Cartesian
coordinate system to the uniform curvilinear coordinate system. This allows
convenient evaluation of the grid metric derivatives at an arbitrary location without
having to resort to finite-difference approximations. To illustrate the WENO-5M
scheme consider fi+1/2 to be a scalar component of Fi+1/2 in the procedure below:
Procedure 2.1: Evaluating left-biased fi+1/2 using WENO-5M:
(1) Construct approximations of the interface flux using each stencil (k=0:2):
( )iiik
i ffff 117261
12021 +−= −−
=+ (2.73)
( )11121 25
61
+−=
+ ++−= iiik
i ffff (2.74)
( )21221 52
61
++=
+ −+= iiik
i ffff (2.75)
(2) Define the smoothness indicators for each stencil:
( ) ( )212
2120 34
412
1213
iiiiii ffffff +−++−= −−−−β (2.76)

33
( ) ( )211
2111 4
121213
−++− −++−= iiiii fffffβ (2.77)
( ) ( )221
2212 43
412
1213
++++ +−++−= iiiiii ffffffβ (2.78)
(3) Define α parameter used to construct the uncorrected weights. The numerator of
each expression denotes the ideal weight needed to produce the fifth-order scheme
when all stencils are equally smooth. The ε variable in the denominator prevents α
from becoming singular and should be chosen on a case-by-case basis (ε = 1e-40).
( )20
00 βε
ωα+
= , ( )2
1
11 βε
ωα+
= , ( )2
2
22 βε
ωα+
= (2.79-2.81)
[ ]103,106,0112:0 =ω Ideal weights (2.82)
(4) The uncorrected, original weights as proposed by Jiang and Shu (1996) are given by:
∑=
= 2
0
00
kkα
αϕ , ∑
=
= 2
0
11
kkα
αϕ , ∑
=
= 2
0
22
kkα
αϕ (2.83-2.85)
(5) Evaluate the mapping function proposed by Henrick et al. (2005):
( ) ( )( )kkk
kkkkkkkkg
ωϕωϕϕωωωϕϕ
213
2
22
−++−+
= ( )1,0∈kω for k=0:2 (2.86)
(6) Evaluate corrected weights:
∑=
= 2
0
00
kkg
gω , ∑
=
= 2
0
11
kkg
gω , ∑
=
= 2
0
22
kkg
gω (2.87-2.89)
(7) Evaluated fi+1/2 using a weighted average:
∑=
++ =2
02121
k
kiki ff ω (2.90)

34
For a less demanding application the procedure above could be applied directly to
generate fi+1/2 for each component of Fi+1/2. However, for the detonation problems of
interest in this work, the direct application of Procedure 2.1 by itself is not sufficient.
In general, the implementation of the WENO-5M scheme varies depending on
whether it is being used to solve a scalar or vector conservation equation and the
complexity of the flowfield in which it will be applied [Shu (1997)]. The flowfields in
this work are extremely challenging as the detonations have Mach numbers as high as
7, in addition to repeated shock wave collisions and reflections. The most robust
implementation in challenging flowfields such as this is to perform a characteristic
decomposition of the convective fluxes and to apply the WENO method in each of the
resulting ns+3 characteristic fields. Additionally, in this work the Local-Lax-
Fredrichs (LLF) flux splitting is used to construct the building block fluxes in each
characteristic field. The use of a Roe-type approach [Shu (1997) ] rather than the LLF
approach was found to work well for 1-D problems, but caused ‘carbuncle’ type errors
when used on challenging 2-D detonation problems.
In order to perform the characteristic decomposition the eigenvalues and
eigenvectors of the flux Jacobians (∂F/∂U, ∂G/∂U) are needed. Building on the work
of Busby and Cinnella (1998, 1999) these have been derived for the Cartesian and
curvilinear systems and are included in Appendix A. The left eigenvectors are
contained in the rows the matrix L, the right eigenvectors are the columns of the
matrix R, and the eigenvalues are contained in the vector λ. The general solution
procedure for determining Fi+1/2 is outlined below for the Cartesian case. The
procedure for the curvilinear case is identical except the curvilinear fluxes and
eigensystem variables are substituted for their Cartesian counterparts.
Procedure 2.2: Characteristic decomposition with WENO-5M-LLF to evaluate Fi+1/2:
(1) Determine the eigenvalues (λi-2:i+3) for every potential node in WENO stencil
(2) Approximate Ui+1/2 by taking the arithmetic mean of Ui and Ui+1.
(3) Construct Li+1/2, Ri+1/2 and λi+1/2 using primitive variables derived from Ui+1/2.

35
(4) Determine the maximum eigenvalue:
( )3:221max ,max +−+= iii λλλ (2.91)
Here λmax is a scalar, λi+1/2 is an ns+3 vector and λi-2:i+3 is a (ns+3,6) matrix.
(5) Construct the two components of the LLF flux:
( )iii UFF max21 λ+=+ for i=i-2:i+2 (2.92)
( )iii UFF max21 λ−=− for i=i+3:i-1 (2.93)
(6) Project the Fi
+ and Fi- fluxes into the characteristic fields using the left
eigenvectors:
[ ][ ]+
+++
++−
+−+
++− = 2112212:2 ,,,, iiiiii
cii FFFFFLF (2.94)
[ ][ ]−−
−−+
−+
−++
−−+ = 1123211:3 ,,,, iiiiii
cii FFFFFLF (2.95)
In the two above operations a matrix product is formed using the (ns+3,ns+3) left
eigenvector matrix and the (ns+3,5) matrix of nodal fluxes.
(7) Evaluate a left-biased interface flux (fi+1/2,pc+) for each component (fi,p
c+) of the
vector Fic+ using Procedure 2.1. Here the p subscript denotes the flux in the pth
characteristic field. Thus, for p=1:ns+3 Procedure 2.1 should be evaluated with
fi,pc+ replacing fi. The resulting interface fluxes in each characteristic field
(fi+1/2,pc+) form the components of Fi+1/2
c+.
(8) Evaluate a right-biased interface flux (fi+1/2,pc-) for each component (fi,p
c-) of the
vector Fic- using the right-biased version of Procedure 2.1. In the right-biased
version of Procedure 2.1 the fi-2:i+2 terms in steps 1 and 2 are replaced by fi+3:i-1 (i.e.
fi-2=fi+3, fi-1=fi+2, etc…). Thus, for p=1:ns+3 the right-biased version of Procedure
2.1 should be evaluated with fi,pc- replacing fi. The resulting interface fluxes in
each characteristic field (fi+1/2,pc-) form the components of Fi+1/2
c-.

36
(9) Construct the characteristic interface flux vector Fi+1/2c:
−
++
++ += ci
ci
ci 212121 FFF (2.96)
(10) Move back out of the characteristic fields to construct Fi+1/2:
[ ][ ]c
iii 212121 +++ = FRF (2.97)
The above equation represents the matrix product of the (ns+3,ns+3) right
eigenvector matrix and the (ns+3,1) characteristic interface flux vector.
Procedure 2.2 can also be used to predict Gi+1/2 by switching the i indices to j indices,
the F fluxes to G fluxes, and by using the eigensystem associated with ∂G/∂U.
2.4.3 Diffusion Terms The evaluation of the diffusive derivatives is significantly less involved than
the evaluation of the convective derivatives. The first step is to evaluate the necessary
primitive variable derivatives. The primitive variable derivatives consist of the
velocity (i.e. ∂u/∂y, ∂v/∂x, etc…), temperature (i.e. ∂T/∂y, ∂T/∂x), and mass fraction
derivatives (i.e. ∂Yi/∂y). In a uniform Cartesian coordinate system these can be
evaluated using the standard, point-wise, finite-difference formulas in Appendix B. In
uniform curvilinear coordinates these same finite-difference formulas can be used to
compute the derivatives in (ξ,η) space (i.e. ∂u/∂ξ, ∂T/∂η, etc…). After the (ξ,η) spatial
derivatives are available they can be transformed to derivatives in (x,y) space needed
to construct the Cartesian diffusive flux vectors.
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
−
∂∂
−∂∂
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∂∂∂∂
η
ξ
ξη
ξηxx
yy
J
y
x (2.98)
Once the Cartesian diffusive flux vectors have been generated they can be used to
construct the curvilinear flux vectors using the transformations given in Section 2.3.

37
At this point the necessary diffusive flux vectors (Fv,Gv,Hv or Fv’,Gv
’,Hv’) should be
available at all i and j nodes.
As before, a conservative approach is taken for evaluating the diffusive flux
derivatives. The interface fluxes (i.e. Fv,i±1/2) are constructed using polynomial
approximations of the numerical flux function. As before the numerical flux function
is defined so that if it replaced Fv,i±1/2 in the divided differences below the resulting
formulation would be exact rather than approximate. Conservative, finite difference
formulas needed to evaluate the diffusive interface flux are also given in Appendix B.
The diffusive fluxes in the x and ξ coordinate directions are given below, while the
corresponding derivatives in the y and η coordinate directions are given by replacing
Fv and Fv’ with Gv and Gv
’, respectively.
xxiviv
i
v
Δ−
≈∂∂ −+ 21,21, FFF (Cartesian) (2.99)
ξξ Δ
−≈
∂∂ −+
'21,
'21,
'iviv
i
v FFF (Curvilinear) (2.100)
2.4.4 Source Terms The evaluation of the axisymmetric source terms (H and Hv) is straight-
forward. For the viscous term the point-wise, finite-difference formulas from
Appendix B are used to compute the necessary primitive variables derivatives. The
difficulty of these source terms becoming singular at y = 0 is circumvented by defining
the flux surfaces to reside at the domain boundaries rather than the nodes.
Consequently, both H and Hv remain finite at all computational nodes.
In order to solve Equation 2.61 the chemical source terms need to be evaluated.
Since the flux surfaces associated with each node are fixed in time, and the time-step-
splitting procedure requires reaction of a motionless fluid, it follows that the chemical
source terms for each node should be those of a fixed-mass reactor (Constant E, ρ).
Under these conditions, Equation 2.61 reduces to the solution of ns species continuity
equations and an energy conservation equation which can be written as:

38
∑=
−=ns
iiii
v
Whcdt
dT1
1 ωρ
& (2.101)
ρω iii W
dtdY &
= i=1,…, ns (2.102)
The system of differential equations above is solved using the VODE package
[Brown et al. (1989)] mentioned previously using data from Un+1/2 as the initial
condition. After being integrated by Δt the new species mass fractions (Yi) are used to
construct the species densities (ρYi) in the conserved variable vector at the new time
level Un+1. The momentum and total energy terms in the conserved variable vector at
Un+1 remain unchanged from their values in Un+1/2.
2.4.5 Boundary Conditions
In this section only it is assumed that n is the unit normal to the surface, u is
the velocity component tangent to the surface, and v is the velocity component parallel
with n. The equation set for which a given boundary condition is necessary is listed in
brackets. The following boundary conditions at solid walls or at an axis of symmetry
are adopted from those given by MacCormack (1995):
(1) Pressure
Solid Wall or Axis of Symmetry:
0=∂∂np Boundary Layer Eq. [Euler, Navier-Stokes] (2.103)
(2) Velocity
Solid Wall:
0== vu No-Slip Condition [Navier-Stokes] (2.104)

39
Axis of Symmetry:
0=∂∂nu , 0=v Free-Slip Condition [Navier-Stokes] (2.105)
(3) Temperature
Solid Wall or Axis of Symmetry:
0=∂∂
nT Adiabatic Wall [Navier-Stokes] (2.106)
Solid Wall:
wallTT = Isothermal Wall [Navier-Stokes] (2.107)
(4) Species
Solid Wall or Axis of Symmetry:
0=∂∂
nYi Non-Catalytic Wall [Navier-Stokes] (2.108)
In addition to the conditions listed above, a characteristics based approach is
used to specify outflow (or inflow) boundary conditions [Poinsot and Lele (1992)].
The details of this approach for use on the reacting, Navier-Stokes equations are given
by Baum et al. (1994). Additional details regarding boundary condition setup are
given, as necessary, in the results to follow.
2.4.6 Grid Generation
A large fraction of modeling results in this thesis were generated using simple,
uniformly-spaced, Cartesian grids on rectangular domains. Uniform, Cartesian girds
were used for all of the 1-D results presented. However, in Chapters 5 and 6 stretched
grids are utilized in order to efficiently resolve the chemical reaction and boundary
layer regions. The stretched grids were constructed using analytic formulas proposed
by MacCormack (unpublished). Consider first the situation illustrated on the left side
of Figure 2.2:
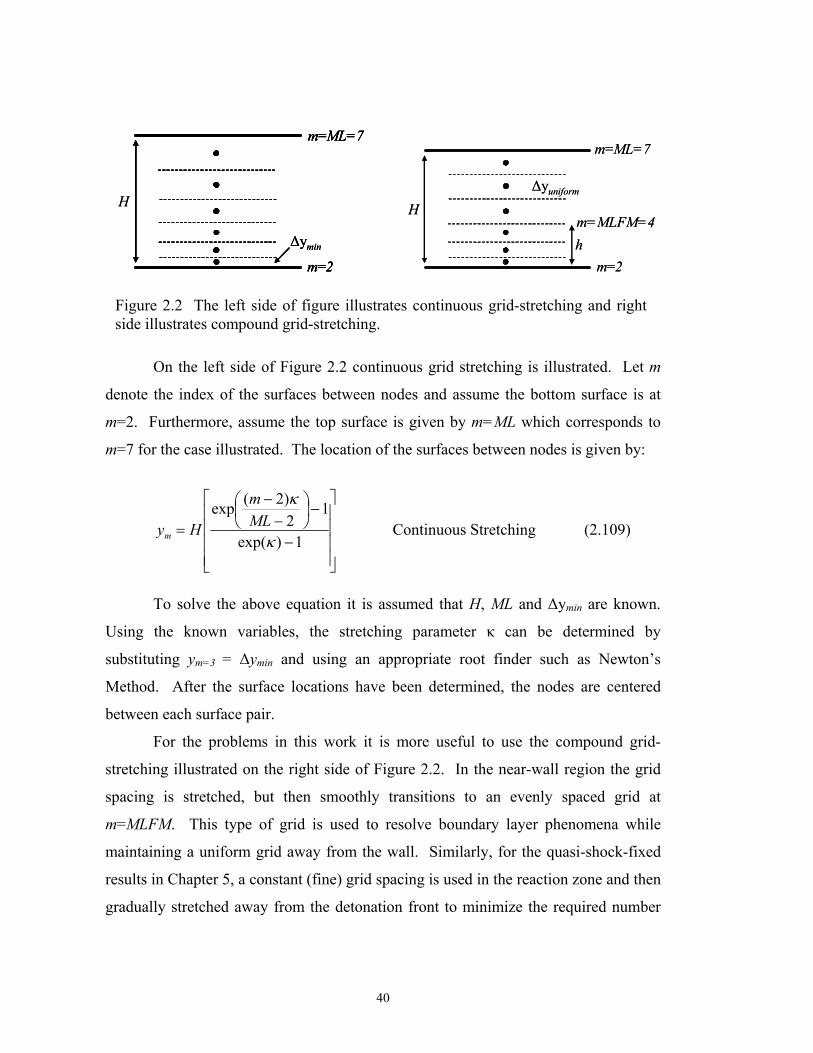
40
On the left side of Figure 2.2 continuous grid stretching is illustrated. Let m
denote the index of the surfaces between nodes and assume the bottom surface is at
m=2. Furthermore, assume the top surface is given by m=ML which corresponds to
m=7 for the case illustrated. The location of the surfaces between nodes is given by:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−⎟⎠⎞
⎜⎝⎛
−−
=1)exp(
12)2(exp
κ
κMLm
Hym Continuous Stretching (2.109)
To solve the above equation it is assumed that H, ML and Δymin are known.
Using the known variables, the stretching parameter κ can be determined by
substituting ym=3 = Δymin and using an appropriate root finder such as Newton’s
Method. After the surface locations have been determined, the nodes are centered
between each surface pair.
For the problems in this work it is more useful to use the compound grid-
stretching illustrated on the right side of Figure 2.2. In the near-wall region the grid
spacing is stretched, but then smoothly transitions to an evenly spaced grid at
m=MLFM. This type of grid is used to resolve boundary layer phenomena while
maintaining a uniform grid away from the wall. Similarly, for the quasi-shock-fixed
results in Chapter 5, a constant (fine) grid spacing is used in the reaction zone and then
gradually stretched away from the detonation front to minimize the required number
Figure 2.2 The left side of figure illustrates continuous grid-stretching and right side illustrates compound grid-stretching.
H
m=2
m=ML=7
Δymin
m=2
m=ML=7
H
hm=MLFM=4
ΔyuniformH
m=2
m=ML=7
Δymin
m=2
m=ML=7
m=2
m=ML=7
Δymin
m=2
m=ML=7
H
hm=MLFM=4
Δyuniform

41
of nodes. For compound grid-stretching the location of the surfaces between nodes is
given by:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−⎟⎠⎞
⎜⎝⎛
−−
=1)exp(
12
)2(exp
κ
κMLFL
m
hym ym ≤ h Stretched Region (2.110)
uniformmm yyy Δ+= −1 ym > h Uniform Region (2.111)
MLFMMLhHyuniform −
−=Δ (2.112)
In the equations above it is assumed that H, ML, MLFM and Δymin are known.
The two unknown parameters κ and h can be determined by specifying the additional
constraints ym=3 = Δymin and Δyuniform = yMLFM+1-yMLFM. These two constraints produce
two non-linear equations that can be solved using the vector version of Newton’s
Method.
2.4.7 Parallelization
The governing equations and numerical methods described above were
implemented in FORTRAN 90/95 (Intel compiler) and made parallel using the
Message Passing Interface (MPI) standard. A simple, 1-D domain decomposition is
performed so that the computational domain is split up using the second coordinate
index j. For example, consider a 2-D computational mesh that extends from i=1:10
through j=1:10. If two processes are launched then the first operates on i=1:10, j=1:5
and the second on i=1:10, j=6:10. Depending on the stencil used in the numerical
method, several lines (j=constant) outside the internal domain of each process need to
be updated each time step. This information is communicated between processes
using the various send and receive protocols provided by MPI. The 1-D simulations in
this work were not run in parallel.
All multidimensional simulation results presented in Chapters 5 and 6 were run
on a 5 node, 10 processor (Dual-Core 2.0 Ghz Intel Xeon), Linux (SUSE) cluster built

42
by Advanced Clustering Technologies. Each node was configured with 4 GB of
memory and the Infiniband interconnect was used for communications between nodes.
Large jobs were launched using 20 processes, one for each available core.
2.5 Model Verification In order to verify the numerical implementation a series of standard test
problems were considered. The ability of the model to accurately capture 1-D,
inviscid flowfields with discontinuities was confirmed by considering the following
benchmark problems: Interacting Blast Waves [Woodward and Collela (1984)],
Shock-Entropy Wave Interaction [Shu and Osher (1989)] and the standard shock tube
problem of Sod (1978). The reacting flow implementation was verified via
comparisons with a benchmark, 1-D, shock tube problem with chemical non-
equilibrium [Deiterding (2000)]. The multidimensional, inviscid implementation was
verified through comparisons with the Double Mach Reflection and Mach 3 Wind
Tunnel with a Step problems proposed by Woodward and Collela (1984). The full
multidimensional, viscous implementation was tested by comparing to published
results for compressible Couette flow [White (1991)], flat plate laminar boundary
layer flow [White (1991)], reflected-shock boundary layer interaction [Sjogreen and
Yee (2003)] and axisymmetric shock wave interaction with a cone [Sun et al. (2005)].
The last test case verified the models ability to capture wall heat flux and shear stress
profiles under similar conditions as those considered in Chapter 6. In all cases, results
from the present model are in excellent agreement with the published benchmarks.

43
Chapter 3: Flowfield Characterization using Cesium-Based Velocimetry
3.1 Introduction Pulse detonation engines are currently an active area of propulsion research
due to their potential for increased performance and reduced mechanical complexity in
comparison to more conventional chemical propulsion systems [Bussing and Pappas
(1994)]. Although idealistic thermodynamic [Wu et al. (2003), Heiser and Pratt
(2002)] and gasdynamic [Talley and Coy (2002), Wintenberger and Shepherd (2006)]
analysis suggests the pulsed propulsion cycle can be more efficient than its steady-
flow counterparts, it remains to be shown whether a practical device can be developed
to exploit these inherent advantages.
Paramount to the success and progression of the PDE concept will be the
development of diagnostics which help characterize the highly transient combustion
environment so that it is better understood and can be modeled with increased
accuracy. Many also believe that an optimized nozzle will be required in order for the
PDE to compete with current practical systems [Morris (2005a)]. In this paper a
velocimeter based on cesium (Cs) absorption spectroscopy is used to collect data in
both a straight-tube and converging-diverging (C-D) nozzle configured PDE, and
these data are used to validate three different numerical models.
Conventional velocimeters such as pitot probes and hot-wire anemometers are
unsuitable diagnostics for PDE flows since they lack the time resolution necessary to

44
capture the highly transient PDE flowfield and they possess the additional
disadvantage of disrupting the flowfield in the immediate vicinity of the measurement
station. More conventional laser-based techniques such as laser Doppler velocimetry
and particle image velocimetry are also at a disadvantage to the present technique
since they typically require more complicated seeding mechanisms along with high
power laser sources and expensive CCD cameras. Absorption-based Doppler-shift
techniques are at an additional disadvantage since at the high pressures present in the
PDE environment the large collisional width of the absorption transition obscures the
relatively small Doppler shift [Wehe et al. (1997)].
The cesium-based velocimeter presented here provides a simple and reliable
way to get temporally and spatially resolved data in the harsh PDE measurement
environment. Additionally, the sensor utilizes inexpensive components which make it
well suited for widespread velocity sensing and control applications. However, this
technique is invasive, due to the perturbation of the flow caused by the seeding
apparatus. Given the relative size and aerodynamic shape of the seeder this flow
perturbation is minimal, and because the seeding is done at a location separate from
the measurement location it is not expected to have a pronounced effect on the fidelity
of the data.
3.2 Facility Description The cesium-based velocimeter is shown schematically in Figure 3.1 applied to
the Stanford PDE facility. The PDE is 160 cm long and 3.81 cm in diameter. The last
60 cm of the tube is removable allowing for the insertion of various nozzle sections.
In this study a C-D nozzle was employed with an area-ratio of 2.25 and an exit
diameter of 3.43 cm. The converging section of the nozzle begins 11.8 cm from the
exit plane (dump tank entrance). In this study the PDE was also operated in its
nominal straight-tube configuration which corresponds to the setup shown in Figure
3.1 without the nozzle blocks at the engine exit. Along the length of the tube, 14
measurement stations, each consisting of up to 4 ports, are spaced in 10 cm increments

45
starting at the head end of the tube. These ports provide access for pressure transducer
measurements, ion probe measurements of detonation wave trajectory, and optical
diagnostic measurements of velocity, temperature and species concentration [Sanders
et al. (2003), Mattison et al. (2002), Sanders et al. (2002a)].
The Stanford PDE facility is operated on a stoichiometric C2H4/O2 mixture.
The fuel and oxidizer are fed through choked orifices into a jet-in-crossflow mixer
where they are premixed just upstream of the head-end injection point. The supply
tank pressures of the fuel and oxidizer being fed to this mixer through choked orifices
can be independently adjusted in order to change the stoichiometry of the charge.
After mixing, the injection plumbing bifurcates and injection occurs at the top and
bottom of the tube as illustrated in Figure 3.1. The ignition of the premixed gases is
initiated when the charge has reached the exit of the tube where the arrival and
stoichiometry of the charge can be monitored with a diode laser sensor (not shown in
Figure 3.1) [Ma et al. (2002)]. After filling is complete the mixture is ignited with a ~
100 mJ electric spark. The deflagration-to-detonation transition (DDT) is measured
using ion probes and for the current facility this distance is ~30 cm. At first the
Figure 3.1 Schematic of Stanford PDE facility with cesium-based velocimetry diagnostic.
3.81
cm 2.29 cm
3.43 cmnozzle dimensions:
flow
igniter
premixed gases(C2H4/O2) 50/50
beam splitter
852 nm diode laser
dump tank
144 cm 16 cm
3.81 cm
2-3 mm
cesium source 10 cm
11.82 cm
3.81
cm 2.29 cm
3.43 cmnozzle dimensions:
flow
igniter
premixed gases(C2H4/O2) 50/50
beam splitter
852 nm diode laser
dump tank
144 cm 16 cm
3.81 cm
2-3 mm
cesium source 10 cm
11.82 cm

46
detonation wave is slightly overdriven, but its velocity then decays and remains within
3% of the Chapman-Jouguet velocity (2.4 km/s for stoichiometric C2H4/O2) once the
wave has passed the measurement station 60 cm from the tube head end. The burned
gas immediately behind the shock front has a velocity 1.1 km/s (C-J wave velocity
minus local sound speed) and it is the time history of this burned gas velocity which is
recorded by the velocimeter at a given measurement station. The gas is discharged
from the open end of the PDE into a large, continuously purged dump tank. The
facility typically operates in single-shot mode although pulse rates up to 1 Hz are
achievable.
3.3 Sensor Description By monitoring the arrival of seeded Cs vapor at two locations spaced a known
streamwise distance apart, a time-of-flight determination of burned gas velocity can be
inferred, as shown initially by Sanders et al. (2003). The detection of the Cs vapor is
accomplished by using a single, fixed-wavelength, 852 nm diode laser (Laser
Components SPECDILAS V-850-GMP). Before being passed through the tube, the
laser source is split using a 50/50 beam splitter and the resulting two parallel (~1 mm
diameter) beams are adjusted so that their streamwise separation distance is 2 – 3 mm
and so that they reach a focus point in the middle of the tube. The two beams are also
given opposite pitches of 3 degrees in the vertical plane to facilitate collection of each
beam on the opposite side of the tube. As the bursts of Cs vapor intersect the laser
beams the D2 resonance transition (62S1/2 → 62P3/2) of atomic cesium is probed and the
transmitted laser signal is diminished as a result of this absorption. Cesium was
chosen as the absorber since its spectroscopic behavior in the PDE operating
environments is well characterized [Sanders et al. (2002b)]. The resulting
transmission signal is independently detected for each beam using a Si photodiode
(Thorlabs® model PDA55) and the output voltage from each diode was recorded at 25
MS/s on a 12-bit digital oscilloscope.

47
The Cs seeding apparatus used in these experiments has a very simple design,
as shown in Figure 3.2, and can be installed at any port allowing data to be gathered at
a number of measurement stations along the tube. The main section of the seeder
consists of a piece of 1.56 mm stainless steel rod. This rod was bent into a hook shape
and the end was tapered and drilled to accept a # 92 (~.18 mm) drill bit. The hook
shape of the seeder was chosen so that it could be installed directly at the measurement
station and still allow seeding 2 cm upstream of the laser probes. In the measurements
presented here the seeder was installed 10 cm upstream of the measurement station
because at this location the best seeding characteristics were observed. During
measurements the drill bit is temporally mated to the main section of the seeder using
a small amount of tacky putty. Before running, the 1 cm long, needle-like, drill bit
surface is swabbed with a saturated CsCl solution. Best results were obtained when
the solution was allowed enough time to dry and crystallize on the surface of the drill
bit. No additional seeding advantage was observed when the CsCl solution was
applied to the hook region of the seeder in addition to the bit. During the PDE cycle
the hot, high-velocity engine gases strip the CsCl particulate from the bit which then
disassociates forming the target absorber, atomic cesium. Reapplication of the CsCl
solution is typically required after 10 engine cycles.
It may be noted that the seeding device is quite small and aerodynamically
shaped to minimize flow perturbation. In previous measurements made in our
Figure 3.2 Modular cesium seeding port.
flow
cesium seeding surface
removable seeding port
flow
cesium seeding surface
removable seeding port

48
laboratory using this same technique [Sanders et al. (2003)], it was noted that the
pressure histories recorded by a side-wall mounted pressure transducer were
unaffected by the introduction of an upstream seeding apparatus. Furthermore,
comparisons of detonation trajectory profiles both with and without the seeding
apparatus show no differences. Additionally, simulations verify that the flowfield is
subsonic at the seeding location over the duration of the blowdown; therefore, strong
flow perturbations due to shocks or rapid expansions are not a concern.
3.4 Data Reduction Methodology A sample trace from the two Si photodetectors along with corresponding
output from the cross-correlation procedure to be described below is shown in Figure
3.3. It is evident that the downstream transmission signal is essentially a time-shifted
version of the upstream signal. The oscillations in both signals can be attributed to the
unsteady nature of the Cs seeding. Rather than a continuous stream of Cs being
deposited to the flowfield, the seeding occurs in pulses which produce distinct features
in both the upstream and downstream transmission signals. Using the time shift
required to match the corresponding features from each signal along with the known
streamwise separation between the two laser beams, a temporally resolved velocity
data set can be constructed.
In order to maximize the objectivity of the signal feature matching and
resulting time shift calculation, a 1-D cross-correlation code was developed. The code
works by analyzing the data from each signal one window (Δt block) at a time. The
characteristic features in the signals are on the order of 20 μs wide for the high
velocity (|u|>100 m/s) portions of the cycle and on the order of 100 μs wide for the
lower velocity portions of the cycle. Consequently, for each data set the window size
is varied between 20 and 100 μs in order to capture the largest number of well-
correlated absorption features. After the window size has been set the code begins
searching for a data window in the downstream signal which has the highest
correlation coefficient with the reference window data from the upstream signal. This

49
search is limited to a certain time interval on each side of the reference data window
since matching features are expected to be close together considering the high
velocities encountered in a PDE. Note that it is necessary to consider data on both
sides of the reference window in order to capture reverse flow data points. In the case
of reverse flow the notion of the upstream and downstream detector signals is
reversed. For additional information regarding the details of the cross-correlation
procedure consult Bendat and Piersol (1993), or for more information regarding how
this type of algorithm is applied to reducing data as shown in Figure 3.3 see Sanders et
al. (2003).
The primary source of error in this data reduction technique arises from the
assumption that the seeded Cs bursts undergo pure axial translation between the two
laser beams. The fact that features in each transmission signal are not perfectly
correlated is evidence of the fact that this is indeed not the case. This deviation from
pure axial translation leads to an uncertainty during the time shift calculation in the
Figure 3.3 Sample of upstream and downstream transmitted signals and corresponding output from cross-correlation procedure.
0 1 2 3 4 5-1.0
-0.5
0.0
0.5
1.0
Cro
ss C
orre
latio
n
Time Shift (μs)
Max Correlation = 0.98Velocity = 713.4 m/s
5170 5175 5180 5185 51900.0
0.5
1.0
1.5
2.0
Det
ecto
r Sig
nal (
V)
Time after ignition (μs)
upstream detector
downstream
detector

50
cross-correlation procedure of approximately 5% [Sanders el al. (2003)]. The error in
this time shift dominates the overall uncertainty of the velocity measurement which is
therefore specified at ± 5%.
3.5 Numerical Models In order to interpret the velocity data and gain additional insight into the PDE
flowfield, a simplified computational model was developed which allows rapid
parametric studies to be conducted on both PDE geometries considered in this study.
For this study a precursor to the more sophisticated model described in Chapter 2 was
utilized. The simple model solves the single-species, frozen-chemistry, Quasi-1D
Euler Equations as presented in Equation 3.1 using a Roe flux splitting algorithm with
an entropy correction to prevent non-physical expansion shocks.
QFU=
∂∂
+∂∂
xA
At1
(3.1)
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
Euρ
ρU ,
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
++=
upEpu
u
)(
2ρρ
F , ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
∂∂
=
0
0
xA
ApQ , ( )xAA = (3.2-3.5)
In order to further simplify the computations the gas is assumed to be
calorically perfect, and the specific heat at constant volume, cv, as well as the
isentropic exponent γs are fixed at the Chapman-Jouguet (C-J) condition. The C-J
condition is evaluated for a stoichiometric C2H4/O2 mixture using the STANJAN
[Reynolds (1986)] chemical equilibrium solver. The resulting values of λs and cv used
in the code are 1.14 and 2647 J/kg·K, respectively. Simulations using the model
described above will be labeled as frozen γ results.
Since numerically resolving the detonation wave is computationally expensive
[Morris (2005a), He and Karagozian (2003)], it is avoided in the simple model
presented here by using the Taylor wave self-similar solution [see Chapter 1] to

51
specify the state of the flow up until the point the detonation wave exits the tube.
Thus, the frozen-chemistry simulations are initialized with the detonation at the tube
exit. For the case of a PDE outfitted with a nozzle, the self-similar solution is only
strictly valid for the constant area section of the tube. To circumvent this problem the
initial conditions for the nozzle blowdown were obtained from the code described by
Morris (2005a), which numerically computes the detonation propagation through the
variable-area nozzle. It is worth noting that the results produced using this more
realistic initial condition are in close accordance with the results produced assuming
the self-similar initial condition extends into the nozzle section.
The exit boundary condition employed in the code is different for the straight-
tube versus C-D nozzle cases. In the case of the straight-tube configuration the Mach
number of the flow at the last interior cell is checked, and if this value is subsonic then
the exit pressure is fixed at the ambient value of 1 atm, and zero relaxation length
[Kailasanath et al. (2000)]. The remaining flow properties are specified at the exit cell
using characteristic relations [Poinsot and Lele (1992)]. If, on the other hand, the last
interior cell is supersonic, then a choked flow condition is imposed at the exit cell
using information from the last interior cell.
For the C-D nozzle case the flow Mach number at the last interior cell is again
checked, and if subsonic then the exit pressure is specified and the exit flow properties
are calculated as described for the straight-tube case. If the last interior cell is
supersonic then there is no additional information required and characteristic relations
are sufficient to specify the flow at the exit cell. It is seen that for the supersonic exit
condition the flow is computed entirely from internal flow properties, and
consequently there is no means for the exit flow to return to a subsonic condition. To
circumvent this problem a check must be performed to see whether a standing normal
shock at the exit would produce a static pressure lower than the ambient value. If true,
then normal shock properties are specified at the last interior cell thus allowing the
subsonic boundary condition to take effect for the exit cell.
In addition to showing results from the frozen-γ code presented above, results
from simulations conducted by Morris (2005a) are also shown. This code solves the

52
multi-species, finite-rate-chemistry, Quasi-1D Euler equations (Equation 2.10).
Although the model developed in Chapter 2 is well suited to treat this problem, it had
not yet been developed at the time this work was performed. Morris’ code implements
a slightly modified version of the ethylene-oxygen reduced chemistry mechanism
developed by Varatharajan and Williams (2002), utilizing the 21 species and 33
forward reactions of that mechanism, but with all 33 reverse reaction rates computed
using the equilibrium constant. The model accurately calculates the C-J detonation
velocity and burned gas state, providing confidence in the mechanism and model.
Additionally, this code has the option of including a heat loss source term as given
below:
( )aweqwh
floss hhu
DC
Q −= ,3/2'''
Pr2
ρ (3.6)
In the equation above, Cf is the skin friction coefficient (Cf = 0.0062 for results
presented herein), Pr is the Prandtl number, Dh is the hydraulic diameter, hw,eq is the
enthalpy defined using the equilibrium gas composition at Twall, and haw is the
adiabatic wall enthalpy computed assuming the recovery factor is given by Pr1/3. A
detailed discussion of this source term and its calibration is given in Chapter 6. The
results from this code, both with and without the heat loss source term, are shown for
both the straight-tube and C-D nozzle configurations. It will be demonstrated that for
the C-D nozzle configuration, which has a relatively long blowdown time, the heat
loss term is necessary in order to capture certain features in the data.
3.6 Results Using the cesium-based velocimetry diagnostic, data were collected at a
measurement station 16 cm from the exit plane for both a straight-tube and C-D
nozzle-configured PDE (Figures 3.4-3.5). In the case of the straight-tube PDE,
velocity data collection is possible for 8 ms. Based on pressure data, the useful thrust

53
producing interval is actually only 6 ms. After 8 ms the temperature and velocity in
the engine have dropped sufficiently that Cs is no longer effectively seeded into the
tube. For the C-D nozzle-configured PDE, the blowdown time is substantially longer
and effective seeding is possible for up to 14 ms after ignition. Pressure data reveal
that the useful thrust producing range for this nozzle configuration lasts for
approximately 16 ms after ignition.
For both PDE configurations tested, it can be observed that at early times (< 3
ms) data is sparser than at later times (see Figures 3.4-3.5). This lack of data can be
attributed to two effects. The primary effect is that at early times the temperature is
sufficiently high that emission is occurring from cesium, as well as the other
combustion products (primarily CH), and this initially obscures the absorption
measurement. The secondary effect is that there is an induction time during which the
Cs must be vaporized and carried by the flow from the seeding station to the
measurement station.
In Figure 3.4, velocity data for the straight-tube configuration is plotted
alongside results from the three different computational models. The maximum
velocity corresponds to the burned gases immediately behind the detonation wave
passing through the measurement station at 1 ms. After this maximum the fluid is
decelerated through the Taylor wave to a local minimum at 1.5 ms. As the detonation
is ejected from the tube an expansion wave is generated at the exit plane which
propagates back into the tube and reaccelerates the gases to a local maximum at 3.5
ms. As gas is continually ejected from the tube the pressure drops and eventually the
exit plane unchokes. The velocity at the measurement station then decays as the
pressure in the tube equilibrates with the ambient environment.
As is evident, the data match all three of the models quite well during the first
5.5 ms. After this time the data begin to rollover whereas the two models which do
not account for heat transfer do not predict this decay until an additional 1 ms has
elapsed. By including the heat loss term in the finite-rate chemistry model the
velocity decay near the end of the cycle is predicted with significantly increased
accuracy. This velocity falloff results from a compression wave which propagates

54
back into the engine when the exit plane unchokes. As the compression wave moves
through the measurement station towards the head wall it decelerates the fluid
particles which are traveling in the opposite direction towards the exit. By including
heat loss in the model the exit plane unchokes sooner, and consequently the velocity
falloff happens earlier than when heat loss is neglected. Additional discrepancies
between model and measurement can be attributed to the simplified 1-D boundary
condition which only approximates the truly 3-D flow at the exit plane.
In Figure 3.5, velocimetry data for the C-D nozzle configured PDE is plotted
alongside results from the three computational models. Due to the area constriction in
the converging section of the nozzle a reflected wave system is established between
the nozzle and the head end of the tube. Each time this reflected wave passes the
measurement station in the streamwise direction there is a corresponding momentary
increase in fluid velocity, which accounts for the peaks in the velocity data shown in
Figure 3.5. Due to the proximity of the measurement station to the converging section
of the nozzle, the sudden increase in local velocity caused by the forward moving
Figure 3.4 Velocimetry data for straight-tube PDE plotted against model data.
0 1 2 3 4 5 6 7 8
0
200
400
600
800
1000
1200
Xmeas= 1.44 m
C2H4/O2 φ = 1
Velo
city
(m/s
)
Time after ignition (ms)
velocimetry data frozen chemistry CFD (γ=1.14)
finite-rate CFD w/o heat loss finite-rate CFD w/ heat loss

55
wave is quickly dissipated as this wave reflects and then travels in the reverse
direction back through the measurement station.
Comparison of the velocimetry data to results from the frozen γ and finite-rate
(without heat loss) models reveal that the baseline velocity and the magnitude of the
velocity peaks are predicted with reasonable accuracy over the first 8 ms of the cycle.
After 8 ms, agreement becomes progressively worse. Early in the cycle (< 4 ms) both
the frozen and finite-rate (without heat loss) models do a reasonable job of predicting
the arrival time of the reflecting wave system. However, at later times both models
prematurely predict wave arrival and this discrepancy is exacerbated over time. This
suggests that non-ideal (i.e. heat transfer) effects are particularly important for long
blowdown times. The ability of the model to capture the correct arrival time of the
reflecting wave is directly related to its ability to capture acoustic speeds at which the
wave is traveling. In a real gas the acoustic speed is determined by both the chemical
Figure 3.5 Velocimetry data for converging-diverging nozzle configured PDE plotted against model data. Window [b] shows a region of window [a] with the vertical axis rescaled.
0 2 4 6 8 10 12 14100
200
300
400
500
0
300
600
900
1200
Time after ignition (ms)
[b]
Xmeas = 1.44 m
C2H4/O2 φ = 1V
eloc
ity (m
/s)
velocimetry data frozen chemistry CFD (γ=1.14)
finite-rate CFD w/o heat loss finite-rate CFD w/ heat loss
[a]

56
composition and the temperature of the mixture. In Figure 3.6 we see that even
though the temperature predicted by the frozen γ code is lower than that of the finite-
rate (without heat loss) code, the acoustic speeds in the frozen code are still higher as
evidenced by the earlier arrival time of the wave system shown in Figure 3.5. This is a
result of the differing chemistry assumptions between the frozen versus finite-rate
models.
In studies by Radulescu and Hanson (2003) it was shown that heat transfer to
the engine walls can have a substantial effect on the temperature history in the PDE
flowfield. Consequently, the temperature in the actual PDE is suspected to be lower
than that predicted by both the frozen and finite-rate (without heat loss) models. In
order to best capture the chemical composition and temperature of the gas (and hence
the acoustic speeds) the heat loss term described in Equation 3.6 was added to the
finite-rate chemistry model. Results from this model are also shown in Figure 3.5 and
it is evident that the arrival of the wave system is predicted with greatly increased
accuracy. The delayed wave arrival time predicted by the finite-rate model (with heat
loss) as compared to the finite-rate model (without heat loss) can be attributed
Figure 3.6 Simulated temperature histories for the C-D nozzle configured PDE.
0 2 4 6 8 10 12 140
500
1000
1500
2000
2500
3000
3500
4000
4500
Xmeas = 1.44 m
C2H4/O2 φ = 1
Tem
pera
ture
(K)
Time after ignition (ms)
frozen γ CFD finite-rate CFD w/o heat loss finite-rate CFD w/ heat loss

57
primarily to the substantially reduced engine temperature which is evident from Figure
3.6. Although the wave arrival is captured accurately by including the heat loss term,
it is seen that the baseline velocity and magnitude of the velocity peaks at times less
than 8 ms are not captured as well as they were with the two codes which neglected
this term. This disagreement suggests additional room for refinement of the heat loss
model.
3.7 Conclusions A velocimeter based on Cs absorption spectroscopy has been used to collect
burned gas velocity data in a PDE configured with and without a C-D nozzle. The
operating principle of the sensor is simple and it provides a means to get microsecond-
resolved velocity data. Due to the modular nature of the seeding apparatus it is also
possible to get spatially resolved data. The results of this study reveal that for the
short blowdown times encountered in the straight-tube PDE, the velocity flowfield can
be accurately predicted over the thrust-producing phase of the cycle (< 6 ms) using an
idealistic, frozen-chemistry model. Accurately predicting the velocity data at later
times in the straight-tube cycle required the inclusion of a convective heat loss term in
the model. For the C-D nozzle case where blowdown times are substantially longer,
the model incorporating heat transfer effects was also required in order to accurately
predict the reflecting wave dynamics. Now that a basic understanding has been
developed for the influence of a C-D nozzle on the PDE flowfield, it is of great
interest to determine how the nozzle should be designed to maximize impulse. This
will be the subject pursued in the next chapter.

58

59
Chapter 4: Unsteady Nozzle Design & Imaging
4.1 Introduction Critical to the success of the PDE concept is the implementation of a nozzle
capable of efficiently converting as much of the thermal energy in the exhaust gases
into usable propulsive force. While optimal nozzle design for steady, constant
pressure, propulsion systems is well-established and relatively straightforward, the
problem of designing nozzles for pulsed propulsion systems poses a significantly
greater challenge due to the inherently unsteady flowfield. In this chapter the primary
focus will be on the determination of an optimal nozzle area ratio and the flowfield
will be further characterized through the use of high-speed schlieren imaging.
To motivate the investigation of PDE nozzles, the performance of an idealized
PDE configured with and without an optimized converging-diverging (C-D) nozzle is
compared to a steady rocket in Figure 4.1. The plotted lines are based on single-cycle,
Q1-D, finite-rate chemistry simulations performed by Morris (2005a) for Pfill=1 atm,
Tfill=300 K, stoichiometric H2-O2. The steady rocket engine performance is computed
assuming the reactants are burned at constant enthalpy and pressure. The optimal
expansion area ratio has been used in both C-D nozzle cases. As evident, the addition
of an optimized C-D nozzle causes the PDE Isp to exceed that of the conventional
rocket at all pressure ratios. On the other hand, the PDE without a nozzle only
outperforms the rocket for Pfill/Pamb < 7. In this work the focus will be on

60
understanding and maximizing the performance of nozzles operating under the
condition Pfill=Pamb. From Figure 4.1 it is clear that as the pressure ratio is increased
the nozzle performance augmentation will only be enhanced further.
Many previous numerical and experimental PDE nozzle studies have been
conducted and presented in the literature. A detailed literature review of work prior to
2002 was performed by Kailasanath (2001, 2003), and more recent efforts have been
chronicled by Wu et al. (2003), and Cooper and Shepherd (2004). Topics of most
recent interest that have been influential on the direction of this work include nozzle
performance at reduced back pressures [Cooper (2004), Morris (2005a, 2005b)] and
multi-cycle nozzle performance [Wu, Ma et al. (2005), Yungster (2003), Cambier and
Tegner (1998), Paxon (2003)]. Several key nozzle design issues have arisen as a
result of these most recent studies. Computational studies by Morris (2005a, 2005b)
and experiments conducted by Cooper (2004) reveal that appropriately designed
nozzles can provide increasing impulse enhancement over the straight tube extension
as the ambient pressure is decreased. Both studies consider single-shot operation
Figure 4.1 Single-pulse Isp for a PDE with and without a C-D nozzle as compared to a steady rocket engine. The reactants are stoichiometric H2-O2 at Pfill=1 atm and Tfill=300 K. Data from Morris (2005a).
10 100 1000150
200
250
300
350
400
I sp (s
)
Pfill / Pamb
PDE w/optimized C-D Nozzle
PDE w/o nozzle
Steady Rocket w/optimized C-D Nozzle

61
where reactant fill pressure is held constant with respect to a variable ambient
condition. Consequently, multi-cycle PDEs will only be able to achieve these large
impulse enhancements provided a method of maintaining a high fill-to-ambient
pressure ratio between cycles is identified. Yungster (2003) also comments on the
importance of maintaining high fill pressures between cycles as high expansion ratio
nozzles can lead to significant over-expansion losses during purging and refilling. Wu
et al. (2003) simulated a multi-cycle, air-breathing PDE and demonstrated the use of a
nozzle with a 0.56 contraction ratio as a means of maintaining higher fill pressure.
Additionally, they noted that the convergent section had the benefit of decreasing the
Mach number of the reactants between cycles. The performance penalty associated
with initiating detonations in non-quiescent, high Mach number reactants has been
studied previously by Guzik and Harris (2002) and Wintenberger and Shepherd
(2006).
Previous studies were successful in identifying the most important criteria
governing unsteady nozzle performance. This list of criteria includes expansion area
ratio, contraction area ratio, nozzle contour (conical, bell, plug, etc.), partial fill
effects, and nozzle pressure ratio. In this paper we choose to focus on the most
fundamental geometric criteria in this list, nozzle expansion and contraction ratio. In a
steady, constant pressure, propulsion system, the nozzle throat is chosen to maintain
chamber pressure while minimizing stagnation pressure losses. In an unsteady PDE
the contraction ratio has the additional role of controlling cycle frequency (blowdown
time) and the strength of the reflecting wave system established in the combustion
chamber which was discussed in Chapter 3. As in the case of the steady system, the
expansion ratio should be chosen to optimally expand the combustion products to
ambient pressure. However, unlike the steady system, the stagnation pressure in the
PDE chamber is time variant, and this must be appropriately accounted for when
choosing an optimal expansion ratio.
In this work a chemically-reacting, Q1-D Euler code was used to
parametrically assess the role of the contraction and expansion area ratios on single-
cycle PDE performance. This work is unique in that a large number of nozzles (16)

62
are simulated and compared to reveal area ratio effects. From these results guidelines
are derived for choosing optimal area ratios for an unsteady PDE. Considerations for
multi-cycle PDEs operating at reduced ambient pressures will also be addressed.
Guided by the results of the parametric study, three nozzles were built and tested in a
recently developed, interchangeable, 2-D nozzle facility. Time-resolved impulse
measurements were made in each nozzle and were spatially resolved on each thrust
surface (e.g. head wall, converging section, diverging section). Comparisons of the
experiments to computational results are made and discrepancies are addressed. To
further aid in assessing the ability of the computations to accurately predict unsteady
nozzle blowdown phenomena, schlieren images of the blowdown process in each of
the three nozzles are also presented. These images of PDE nozzle gasdynamics are the
first available in the literature.
The emphasis of the current work is on single-cycle, unsteady nozzle
performance and flow phenomena. It is well understood in the PDE community that
multi-cycle and single-cycle nozzle optimization studies do not necessarily produce
convergent results. Nevertheless, the utility of the single-cycle results presented in
this paper is to illuminate generalized unsteady nozzle behavior which can then be
extended to more practical multi-cycle systems. The results presented herein should
also heighten the readers’ awareness of the importance of comparing optimally
designed versions of each nozzle type. For instance, with a limited number of data
points corresponding to arbitrarily-designed diverging nozzles, a general conclusion
may be drawn that straight-tube extensions are superior to diverging nozzles.
However, the opposite is likely to be the case if the diverging nozzles’ expansion ratio
is chosen optimally.
4.2 Numerical Model The unsteady, compressible, Q1-D Euler equations (Equation 2.10) are used as
an approximate model of gasdynamics in this study. Real detonation waves exhibit
multidimensional structures and create complex systems of reflecting waves when

63
propagating through variable-area nozzles. Nozzle separation is also an inherently
viscous, multidimensional phenomenon that cannot be simulated with this equation
set. Nevertheless, while this version of the model will be inadequate for capturing
these multidimensional, viscous flow features, it will provide a computationally
inexpensive platform from which to conduct parametric nozzle studies. Additionally,
Q1-D models have been shown in the past to predict PDE flowfield variables in good
agreement with experimental data [Owens et. al (2005), Mattison et al. (2005),
Barbour et al. (2004)].
The numerical methods used to solve the governing equations are the same as
those presented in Chapter 2 with one modification. Rather than using the WENO-5M
method, the 3rd-order, Essentially Non-Oscillatory (ENO) method developed by Shu
and Osher (1989) is utilized. The ENO method was a precursor to the development of
the WENO method, with the later having a higher-order convergence rate while using
the same numerical stencil. As stated previously, the high-order convergence rate is
only realized when the numerical method is applied to smooth flows without sharp
discontinuities [Aslam (2001)].
In this study we consider stoichiometric C2H4/O2 and use a slightly modified
version of the 21 species, 33 reaction reduced mechanism developed by Varatharajan
and Williams (2002). The modification involves making the 33 forward reactions
described in the original mechanism reversible so that the equilibrium constants are
always used to compute the reverse reaction rate coefficient. For the grid resolution
used throughout this study the level of detail present in the chemical mechanism is
somewhat superfluous since an attempt is not made to resolve the non-equilibrium
chemistry in the reaction zone. However, the mechanism provides a reliable way to
reach equilibrium without having to tune any problem-dependent variables as would
be the case for a global treatment of the reaction kinetics. Additionally, the use of a
chemical mechanism that has been validated over a wide range of conditions provides
a more robust platform from which to make quantitative performance comparisons
with experimental data.

64
For the single-pulse calculations considered in this work a reflective boundary
condition is used at the tube head wall. A characteristic [Baum et al. (1994)], subsonic
inflow boundary condition can also be activated at the head wall in order to simulate
purging and refilling, although this capability is not used. An analogous characteristic
outflow boundary condition is used at the exit plane. For the case of subsonic outflow,
ambient pressure is specified directly at the tube exit. The resulting effect of a zero-
relaxation-length, one-dimensional boundary condition has been explored previously
by Kailasanath et al. (2000). Additional details regarding the exit boundary condition
implementation were discussed in section 3.5.
4.3 Area Ratio Effects on Nozzle Performance
4.3.1 Test Configuration Using the model described in the previous section, a parametric assessment of
the effect of contraction and expansion area ratio on nozzle performance was
conducted. Figure 4.2 depicts the test configuration used in this computational study.
In all cases a stoichiometric mixture of C2H4/O2 was used to fill the entire tube
volume, including the nozzle section. The detonation was initiated directly using a 1
mm long region of high temperature and pressure gasses adjacent to the head wall as
the spark region. For all cases the spark temperature was set to 3000 K while the ratio
of Pspark/Pfill was fixed at 30. Using a fixed Pspark for all tested values of Pfill was
avoided since at the lowest fill pressures a high Pspark value leads to highly overdriven
detonations and has a non-negligible effect on the resulting impulse.
For all fill pressures tested the model computes average detonation velocity to
within 2.5% of the C-J value computed using STANJAN [Reynolds (1986)]. The C-J
burned gas state is reproduced nearly exactly at the highest tested fill pressures with
maximum deviations on the order 5% at the lowest fill pressure. Detonation formation
and propagation are computed at a uniform grid resolution of 0.1 mm. This grid
resolution is too coarse to resolve the reaction zone, especially at high fill pressures,

65
but shows high fidelity for reproducing the C-J state as indicated above. The fully
reacting equations are solved using 0.1 mm grid resolution until the detonation front
has reached the nozzle entrance, at which point the chemistry is frozen throughout the
entire domain, and the remainder of the blowdown is computed at 0.4 mm grid
resolution. A grid refinement study was performed to identify the least number of grid
points required to resolve the flowfield and accurately capture the C-J state.
The computed Isp is evaluated based on the fuel and oxidizer mass occupying
the thrust chamber up to the start of the nozzle section. Consequently, the
fuel/oxidizer loading is the same for all nozzle cases evaluated at a given fill pressure.
Equations 4.1 and 4.2 indicate how Ipulse and Isp are defined throughout this work. In
effect, the stoichiometric mixture of C2H4/O2 occupying the nozzle section is isolated
from the rest of the thrust chamber by a virtual diaphragm until detonation arrival.
Since the chemistry is frozen after detonation arrival, the nozzle mixture does not
combust and acts only as a tamper mass. As discussed by Morris (2005a), the choice
of gas composition for the nozzle tamper mass can have a small effect on the resulting
impulse. However, for this study the nozzle fluid composition is invariant between
cases and is not expected to affect the resulting trends.
Aexit2.381 mm (L/D = 42)
5 mm5 mm9 cm
Atube Athroat
flow
Aexit2.381 mm (L/D = 42)
5 mm5 mm9 cm
Atube Athroat
flow
eFigure 4.2 Configuration used for parametric analysis of area ratio effects. Tube length and nozzle length are fixed while nozzle contraction and expansion area ratios are varied by changing the inlet and exit angles. Detonation formation and propagation are computed with the fully reactive set of equations until the detonation reaches the nozzle inlet at which point the chemistry is frozen for the remainder of the blowdown.

66
( )∫=cyclet
xpulse dttFI0
(4.1)
gm
II
oxidizerfuel
pulsesp ⋅
=+
(4.2)
The choice to freeze the chemistry after detonation arrival at the nozzle
entrance was done to avoid the computational expense of updating the chemical
source terms throughout the blowdown. Several runs were made to compare frozen
cases to runs made with finite-rate kinetics occurring throughout the blowdown. In
general, the inclusion of finite-rate kinetics in the blowdown has the effect of
maintaining higher chamber temperatures due to its ability to capture exothermic
recombination reactions. The extra energy release results in slightly higher chamber
pressures which translate to increased Isp values on the order of 5% for the cases
tested. In this parametric study, the actual magnitude of the Isp results are of
secondary importance. The primary goal is to correctly reproduce trends resulting
from changes in area ratio. The role of nozzle chemistry is expected to have the most
substantial impact in nozzles with large expansion area ratios where inlet temperatures
will be substantially higher than exit temperatures. In this study the simulated
expansion ratios are low, and thus the choice to freeze the chemistry during blowdown
is expected to affect all nozzles equally and preserve the desired trends.
The nozzle used in the test configuration is a variable-area-ratio, conical,
converging-diverging (C-D) nozzle of fixed length as depicted in Figure 4.2. A fixed
nozzle length was employed to prevent the partial-fill phenomena from becoming a
competing variable [Li and Kailasanath (2002)]. If the nozzle length were not
constant then the performance of longer nozzles would benefit from the partial fill
effect more so than shorter nozzles, and this would obscure the observation of area
ratio influence. The contraction area ratio is adjusted by varying the convergent inlet
angle, and the expansion area ratio is controlled similarly by varying the divergent exit
angle. To minimize the impact of using a Q1-D model, the nozzle half angles are kept
small with the maximum never exceeding 6 degrees. The tube L/D ratio was selected
to replicate the experimental PDE facility which will be described shortly.

67
In this study, in contrast to previous single-cycle studies, the reactant fill
pressure is decreased in parallel with the ambient pressure in order to simulate high
altitude flight conditions. In each case the reactant initial condition is set by equating
the fill pressure to the ambient pressure while setting the fill temperature to 300 K.
The single-cycle blowdown time is defined as the time between detonation initiation
and the time at which the head wall of the PDE decays to ambient pressure. As
discussed previously, multi-cycle simulations have revealed the difficulty in
maintaining chamber pressures above the ambient value during refilling. Equating the
fill pressure and ambient pressure was chosen to more closely approximate current
multi-cycle operation. It should be emphasized that PDE performance increases
substantially as the fill-to-ambient pressure ratio is increased.
Sixteen nozzles were considered in this study in addition to the straight-tube
extension which serves as a reference condition. The contraction area ratio for this set
of nozzles varied between 0.4 and 1.0, representing maximum throat obstruction and
no throat obstruction, respectively. The expansion area ratio was increased
incrementally until an optimal point was identified for each contraction area ratio.
The range of expansion ratios was not known a priori, and consequently the number
and exact geometry of each nozzle in the test matrix was not predetermined. This
process was repeated at five different fill pressures ranging from 1 atm down to 0.05
atm.
4.3.2 Simulation Results
In Figure 4.3 single-cycle Isp for stoichiometric C2H4/O2 is plotted versus
nozzle area ratio for the case of 1 atm fill pressure. The left-running axis shows
nozzles with increasing expansion area ratio while the right-running axis shows
nozzles with a decreasing level of throat obstruction. The projection of each curve
onto each of the 3-axis planes is shown with a dashed line. The projection on the
back-left surface illustrates very clearly that single cycle Isp decreases as throat
obstruction increases. This effect occurs because the impulse loss incurred on the
convergent section is generally larger than the increase in impulse incurred at the head

68
due to wave reflections and increased blowdown time. The vertical separation
between projections on the back-left plane reveals the effect of expansion area ratio.
The three upper curves are very close to the optimal expansion area ratio, whereas the
lower curve, representing Aexit / Athroat = 1.25, is under-expanded and has a decreased
level of performance.
The parabolic shapes of the curves on the back-right surface reveal the optimal
expansion area ratio for each nozzle configuration. While there are not enough data
points to refine this optimal value exactly, the approximate optimal expansion ratio is
very close to 1.75 for all four contraction ratios illustrated. This reveals that optimal
expansion area ratio is not a strong function of the level of throat obstruction. This
point will be examined further shortly. Although expansion ratios above 2 are not
shown, the downward slope will continue as performance drops due to overexpansion.
Losses due to overexpansion can be severe, especially at high back pressures,
and without a carefully designed expansion ratio it may be concluded that straight tube
is the preferred configuration. The reference straight-tube case for the 1 atm condition
Figure 4.3 Single-cycle Isp versus area ratio. Reference Isp for the straight-tube extension is 180.2 sec. (Pfill = Pamb = 1 atm)
Figure 4.4 Normalized single-cycle blowdown time versus area ratio. Blowdown times have been normalized by the straight-tube blowdown time. (Pfill = Pamb = 1 atm)
0.40.6
0.81.0
1.25
1.50
1.752.00
178
180
182
184
186
188
Aexit /A
throat A throat/A tube
I sp (s
)
0.40.6
0.8
1.0 1.25
1.50
1.752.000.8
1.0
1.2
1.4
1.6
1.8
2.0
2.2
τ blow
dow
n
A exit/A throatA
throat /Atube

69
illustrated in Figure 4.3 has an Isp of 180.2 sec. Figure 4.3 reveals that all optimally
expanded nozzle configurations either match or exceed this level of performance. The
straight tube will only show significant performance enhancement over nozzles with
expansion ratios that deviate substantially from this optimal point. For instance, a
purely diverging nozzle with an expansion ratio of 4 (not shown) produces a single
cycle Isp of 168 seconds for the conditions of Figure 4.3. This is 7% lower in
performance then the straight tube case, yet the optimally expanded diverging nozzle
depicted in Figure 4.3 outperforms the straight tube case by 4%. The performance
benefit is modest in this case since the ratio of Pfill/Pamb=1.
In Figure 4.4 the normalized single-cycle blowdown time is plotted as a
function of area ratio. Here, the blowdown times for each nozzle configuration have
been normalized by the straight-tube blowdown time. The projections on the back
right surface of the plot reveal the high sensitivity of blowdown time to contraction
area ratio. Nozzles with contraction area ratios of 0.4 take over twice as long to
complete a single cycle relative to the straight-tube case. On the other hand, purely
diverging nozzles have slightly shorter blowdown times than the straight-tube case.
For multi-cycle PDEs, where high operating frequency is desirable, minimizing cycle
time is an important consideration. The projection on the back left surface of Figure
4.4 reveals that blowdown time is insensitive to expansion ratio.
Figures 4.3 and 4.4 portray the optimally-expanded, diverging nozzle as the
top performer because it attains the highest Isp and has the shortest blowdown time.
However, as indicated previously, a multi-cycle PDE will not operate efficiently
unless the reactants can be combusted at high pressure and low Mach number. From
this standpoint the purely diverging nozzle is the worst choice as its lack of a throat
leads to higher velocities and lower chamber pressures at the end of a cycle.
Ultimately, designing the contraction ratio for a multi-cycle PDE will be done as an
iterative trade-off between the single-cycle performances losses resulting from throat
constriction versus the multi-cycle benefit of increasing the combustion efficiency by
optimizing the state of the reactants before detonation initiation.

70
In designing the expansion area ratio for a steady nozzle the optimal point can
be found for a given ambient pressure using simple, isentropic analysis provided the
stagnation pressure of the combustion chamber is known. A similar procedure can be
done for the unsteady PDE provided a suitable definition for the design stagnation
pressure is identified. In this work the single-cycle, time-averaged head wall pressure
is proposed for this purpose. This pressure is defined as indicated in Equation 4.3.
For multi-cycle PDEs a more suitable definition would involve averaging over the
limit cycle which would be defined to include purging and refilling stages.
cycle
tcycle
o headavgo t
dtPP ∫ ⋅
=, (4.3)
Using this definition, Po,avg has been plotted in Figure 4.5 for each of the
sixteen different nozzle configurations at the 1 atm condition. Figure 4.5 indicates that
Po,avg decreases as the level of throat obstruction increases. This may go against initial
intuition; however, the effect is a result of the prolonged amount of time it takes the
plateau pressure to relax back to the ambient condition for nozzles with increased
throat obstruction. During this relaxation period the average head pressure is lower
than the plateau condition (P3), which dominates the early stages of the cycle.
Consequently, configurations with the short blowdown times have higher Po,avg values
which are closer to P3 than configurations with long blowdown times. Figure 4.5 also
reveals that the Po,avg is not sensitive to expansion area ratio. This is a convenience to
the designer since it decouples the design stagnation pressure from the quantity being
optimized.
With regard to Figure 4.5 a general point can also be made that if the fill
pressure is at least equal to the ambient pressure then there will be some performance
enhancement obtainable through the implementation of a nozzle. This is the case
because Po,avg during a single cycle is necessarily higher then the ambient value as a
result of detonative compression. This elevated stagnation pressure can always be
expanded to some extent to extract additional performance. The level of performance
augmentation that results from this expansion varies directly with Po,avg / Pamb. This

71
was indirectly shown in Cooper and Shepherd (2004) and Morris (2005a) where P3
and Pfill were considered instead of Po,avg. All three of these reference stagnation
pressures are directly proportional to one another.
In the course of this study simulation data were generated in order to reproduce
Figures 4.3-4.5 at four additional fill pressures extending down to 0.05 atm. The
trends already discussed with regard to the 1 atm case apply to each of the cases
investigated at lower pressures, and for this reason these plots will not be shown.
Instead, to summarize the effects of reduced fill pressure, in Figure 4.6 Isp is plotted
versus expansion ratio for a series of purely diverging nozzles operating at different
fill pressures.
The first major conclusion to draw from Figure 4.6 is that Isp scales directly
with fill pressure over the range shown. The optimized diverging nozzle at 1 atm fill
pressure shows a 9% increase in Isp performance over the optimized nozzle at 0.05
atm. The performance increase is directly attributable to the increased heat release
occurring at higher pressures as a result of increased rate of exothermic recombination.
Figure 4.5 Po,avg versus area ratio. Reference Po,avg for the straight tube is 6.53 atm. (Pfill = Pamb = 1atm)
0.40.6
0.81.0
1.25
1.50
1.752.00
5.50
5.75
6.00
6.25
6.50
6.75
Aexit /A
throat
P
o, a
v g (a
tm)
A throat/A tube1.0 1.2 1.4 1.6 1.8 2.0
164
168
172
176
180
184
188
1.00 atm 0.50 atm 0.20 atm 0.10 atm 0.05 atm Predicted Ae/At optimum
I sp (s
)Aexit/Atube
Figure 4.6 Diverging nozzle Ispversus expansion area ratio. Crossed points indicate isentropic prediction of optimal expansion area ratio. For each case Pfill = Pamb.

72
It should be noted that a high pressure limit is expected to be reached as increased
recombination leads to a state where radical species are dominated by major products.
This effect was observed previously by Wintenberger et al. (2003). The direct scaling
of Isp with Pfill below this high pressure limit again emphasizes the importance of
maintaining high Pfill in multi-cycle operation. It should again be emphasized that the
magnitude of the performance results in Figure 4.6 would be shifted upwards if Pfill /
Pamb were greater than unity.
The second point to draw from Figure 4.6 is that the optimal area ratio does not
change substantially between the various pressure conditions. This is to be expected
since optimal area ratio is primarily a function of Pfill / Pamb, which is held constant,
and only minimally dependent on Pfill through the chemical recombination effect
discussed previously. Consequently, it is expected that higher Pfill cases would have
slightly higher optimal expansion area ratios and this expected trend is recovered in
Figure 4.6.
For the nozzle designer looking for a simple, first order method of identifying
optimal expansion area ratio it would be particularly convenient to be able to identify
Po,avg without having to perform detailed CFD calculations. The most direct way of
getting Po,avg is to measure it experimentally. Ideally, this would be done at a given
contraction area ratio, as it has been shown that Po,avg is most sensitive to this
parameter. Once Po,avg has been determined for a given contraction ratio an isentropic
calculation can be performed to identify the optimal expansion area ratio.
Alternatively, it is also possible to roughly estimate Po,avg for a straight-tube
configuration based on Wintenberger’s (2003) analytic model. The major uncertainty
in using this analytic method arises in defining the duration of a single-cycle, which is
not explicitly treated in the model.
The crossed data points in Figure 4.6 are an isentropic prediction of the
optimal expansion ratio (not the Isp), based on computed values of Po,avg for the
straight tube evaluated at each fill pressure. The straight-tube Po,avg is an appropriate
reference case for the diverging nozzles shown in Figure 4.6 since both configurations
have the same contraction ratio. As evident, this simple analysis is able to predict the

73
optimal expansion ratio to within the resolution of the computations. This type of
simple analysis could be useful in providing a starting point for more sophisticated
optimization procedures involving multidimensional CFD.
4.4 Impulse Measurement & Schlieren Imaging
4.4.1 Test Configuration In order to validate the trends discussed in the parametric study, three nozzle
sections were fabricated for experimental testing. The first nozzle is a planar (2-D),
C-D nozzle with a contraction ratio of 0.4 and an expansion area ratio of 2.0. The
second nozzle is a planar, diverging nozzle with an expansion area ratio of 2.0.
Detailed drawings of both nozzle inserts are shown in Figure 4.7. The optimal area
ratios identified in the parametric study are not strictly applicable to the experimental
facility because of differing geometry, initiation method, and filling strategies which
will be discussed shortly. Nevertheless, an expansion ratio of 2 was chosen to be in
close vicinity to the optimal point from the parametric study, and is sufficiently close
to the true optimal point to recover the trends discussed in the previous section. The
third nozzle section is simply a square-channel, straight extension. All nozzles
considered in these experiments were planar (2-D) in order to allow schlieren imaging
of the entire nozzle channel. The flow visualization is intended to aid in assessing the
validity of using the proposed computational model and helps justify discrepancies
between observed and simulated PDE performance.

74
4.4.1.1 PDE Facility Description The PDE is 160 cm long with the first 100 cm of tube consisting of 3.81 cm
diameter round tube. The last 60 cm consists of a 20 cm long, constant-area, round-to-
square transition, followed by a 20 cm long square recovery section, followed by a 20
cm long, planar nozzle visualization section. The top and bottom surfaces of the
nozzle section are removable, allowing arbitrary two-dimensional geometries to be
tested. The L/D ratio is 42, as was the case for the parametric study.
For this study the facility is operated on a stoichiometric C2H4/O2 mixture. The
fuel and oxidizer are fed through choked orifices into a jet-in-crossflow mixer where
they are premixed just upstream of the head-end injection point. The supply tank
pressures of the fuel and oxidizer being fed to this mixer through choked orifices can
be independently adjusted in order to change the stoichiometry of the charge. After
mixing, the injection plumbing bifurcates and injection occurs at the top and bottom of
the tube as illustrated in Figure 4.8. The ignition of the premixed gases is initiated
when the reactant charge has reached the exit of the tube where the arrival and
stoichiometry can be monitored with a diode laser sensor (not shown) [Barbour et al.
(2005) and Ma et al. (2002)]. It is important to note that these experiments differ
slightly from the parametric study since the reactants fully fill the nozzle section as
Figure 4.7 Geometry for C-D nozzle (left) and diverging nozzle (right). Nozzle width (into page) is constant and equal to 3.38 cm. The dotted square indicates viewable section during schlieren imaging.

75
opposed to having a non-reactive tamper mass in the nozzle. After filling is complete,
the mixture is ignited with a 100 mJ electric spark which is located 6 cm from the head
wall.
The deflagration-to-detonation transition (DDT) is measured using ion probes,
and a fully established detonation wave takes approximately 30 cm to develop. At
first the detonation wave is slightly overdriven, but the wave speed then decays and
remains within 3% of the C-J value (2.4 km/s for stoichiometric C2H4/O2) after
passing the measurement station 60 cm from the tube head wall. Exhaust gases are
discharged from the open end of the PDE into a large, continuously purged dump tank.
In this study the tube is operated in single shot-mode only and all experimental results
were conducted at Pfill=Pamb=1 atm. It is important to understand when interpreting
the experimental results that the magnitude of the measured values of thrust and Isp
would increase if the experiments had been conducted at a Pfill/Pamb ratio greater than
unity.
Figure 4.8 Experimental PDE facility with planar, nozzle viewing chamber. Also shown is mirror-based, Z-arrangement schlieren imaging system.
flow
igniter
premixed gases(C2H4/O2)
3.81 cm
100 cm 40 cmstraight tube round-to-square
imacon 468 camera
flash lamp
knife edge
planar nozzle section(interchangeable inserts)
y
x
flow
igniter
premixed gases(C2H4/O2)
3.81 cm
100 cm 40 cmstraight tube round-to-square
imacon 468 camera
flash lamp
knife edge
planar nozzle section(interchangeable inserts)
y
x

76
4.4.1.2 Impulse Measurement Setup Time-resolved thrust measurements are made using wall-mounted pressure
transducers in each nozzle, as shown in Figure 4.7, as well as a transducer in the head
wall. All pressure transducers are Kistler model 603B1 and each is connected to its
own Kistler model 5010B charge amplifier.
Neglecting viscous effects, the instantaneous force vector acting on the engine
during a single cycle can be determined by integrating the gauge wall pressure over
the internal surface of the PDE as in Equation 4.4:
( ) ∫∫ ⋅==
Swall dSnIPtF rr
(4.4)
In these experiments it is assumed that wall pressure forces on the top and
bottom nozzle surfaces are symmetric, and that the pressure measured at the center of
the head wall acts uniformly over this surface. The x-component of the force vector
(thrust) is of primary concern and consequently only measurements at the head wall
and nozzle surfaces are required.
Single-cycle impulse is computed by integrating the thrust over the cycle time
as shown previously in Equation 4.1. The cycle time is defined, as before, to be the
elapsed time from ignition until the head wall pressure has decayed to the ambient
value. The single-cycle specific impulse is computed using Equation 4.2.
When reducing the nozzle pressure data from the C-D and diverging nozzles,
rather than performing a coarse spatial integration using only the transducer locations
as discrete elements, the pressure data is fit using monotone, Hermite interpolating
polynomials. The fit is believed to increase the accuracy of the spatial integration
within the nozzle and is performed separately on pressure data at each time level
throughout the blowdown. The Hermite polynomials were chosen because they
produce no overshoot between data points and were observed to maintain the expected
curvature in the pressure profile throughout the cycle.

77
4.4.1.3 Schlieren Imaging Setup Figure 4.8 also shows the mirror-based, Z-arrangement schlieren system used
for this study. The light source is a Hadland Photonics pulsed xenon flash lamp. The
system has programmable pulse widths of 20, 50 and 200 μs with corresponding
output energies of 125, 375 and 700 J, respectively. Nominally the 50 μs pulse width
was used for this study. The Imacon 468 camera system, also manufactured by
Hadland Photonics, consists of eight separately intensified CCD arrays (576x385),
which are illuminated independently by an internal beam splitter which directs light
onto each of the eight channels. The interframe timing and exposure of each channel
can be independently adjusted from 10 ns to 1 ms. Internal camera timing events are
controlled by a 100 MHz quartz crystal and output triggers are available to program
external devices such as the pulsed xenon flash lamp.
Two 14 cm diameter, 61 cm focal length, parabolic mirrors were used to
collimate light from the source and refocus the light on the camera side to the location
of the knife edge. To consolidate the size of the setup a flat mirror was used in-
between the parabolic mirror and the knife edge. Unless otherwise noted, the knife-
edge was oriented vertically to provide sensitivity to density gradients along the
nozzle x-axis.
The dotted square inside each insert in Figure 4.7 indicates the viewable
section of the nozzle. The windows for the nozzle section were made from 7.1 cm
square, 1.25 cm thick sapphire. The hardness of the windows made them extremely
resistant to scratching and proved to be a far superior choice over the polycarbonate
windows which were used in preliminary experiments. In practice the windows
needed to be cleaned every 10 cycles as the large turbulent boundary layer present at
the end of the cycle would leave deposits near the edges of the channel.
4.4.2 Thrust Measurement Results
Thrust measurements for all three nozzles will be presented along with the
results computed using the Q1-D model. For the purpose of accurate comparison the
simulated results are computed using full finite-rate chemistry throughout the

78
blowdown. The detonation wave is initiated using a 3000 K, 10 atm spark region
occupying 1% of the tube volume centered at the igniter location. In order to avoid
the computational expense of simulating the larger domain, each case is computed at
1/16 scale and the results are correspondingly rescaled in time by the same factor. This
scaling procedure is predicated on the fact the model does not contain any diffusive
terms, such as viscosity and thermal conduction, which would be sensitive to an
absolute length scale. Also, because no attempt has been made to resolve the reaction
zone, the chemical production rates do not need to be rescaled to preserve the ratio of
the reaction zone to the length of the facility. This scaling procedure, used with the
same chemical mechanism and grid resolution, has been used successfully in the past
to simulate PDE parameters including velocity, temperature, and XOH in close
agreement with experimental data [Owens et al. (2005), Mattison et al. (2005)].
Rather than discuss Isp results in conjunction with the thrust measurements, this
topic will be deferred until after the schlieren images for each nozzle insert have been
presented. The imaging results reveal several aspects of the flowfield which lend
additional insight into the comparisons of Isp between all nozzle cases. In this section
the focus will be on trends in the thrust curves for each nozzle and how they differ
from the simulated result.
4.4.2.1 Straight Tube Straight-tube results are presented first since it represents the baseline case and
will have several features in common with the other two nozzles. The first thing to
observe in Figure 4.9 is the difference between the simulation and the experiment at
time-zero. At early times the simulation shows an instantaneous spike corresponding
to direct initiation and then reflection of the detonation wave off the head wall. Recall
that the igniter is actually offset from the head wall by 6 cm. In the experiment we
observe a 0.3 ms delay before the head pressure begins to rise. The spark energy of
our ignition system is not sufficient to generate direct initiation, thus the first
experimental spike is the result of the left-running DDT process occurring between the
spark location and the head wall. The second larger spike in the experimental plot

79
results from the head wall reflection of a left-running shock wave that forms after the
right-running detonation front has become established. This left-running shock wave,
often called a retonation wave, is generated due to the large pressure differential
between the C-J state and the relatively low pressure wake occupying the DDT region.
The multidimensional flowfield development that results from a weak point ignition
source like that used in these experiments is addressed further in Appendix C.
Several attempts of limited success were made at crudely simulating this
phenomenon using the Q1-D model by depositing less energy into the spark region,
thereby delaying the coupling of the reaction zone with the lead shock. While it was
possible to capture the basic wave behavior of the process described above, the
timings of the events were not in good agreement with experiment. The inability of
the Q1-D model to capture this early time phenomenon is attributed to the lack of
diffusion in the purely convective model. In order to model the DDT process, flame
speed would have to be calculated accurately which necessitates the inclusion of
diffusive terms. This problem can be pursued using the multidimensional, Navier-
Stokes model from Chapter 2 although quantitative DDT simulations have not yet
been realized.
Figure 4.9 Straight-tube thrust comparison of simulation versus experiment. Time zero corresponds to ignition and the blowdown is terminated when Phead = 1 atm.
0.000 0.001 0.002 0.003 0.004 0.005 0.006 0.007
0
2000
4000
6000
8000
Forc
e (N
)
Time (s)
Simulation Experiment

80
The second important discrepancy between the experiment and the model is
with regard to the plateau force. For reasons already discussed, the plateau force will
be longer in the simulation as a result of direct initiation. The effect this has on
differences between computed and measured Isp will be considered shortly. The
magnitudes of the plateau regions are different as well. The plateau force observed in
experiments is 24% lower than the computed result. In the past this discrepancy has
been attributed to heat transfer effects [Radulescu and Hanson (2005)], which are not
accounted for in the model. While heat transfer certainly plays a role in the observed
discrepancy it is also necessary to account for friction and condensation phenomena.
A detailed discussion of these non-ideal, wall losses will be the subject of Chapter 6.
4.4.2.2 Converging-Diverging Nozzle In Figure 4.10, as expected, the effects of direct initiation versus a finite DDT
distance are again visible. Note that the spike in the experimental data at time zero is
caused by electromagnetic interference from the igniter and does not represent a
pressure spike. The discrepancy in plateau force between experiment and simulation
is also identical to that described for the straight-tube case. This discrepancy will
extend to the diverging nozzle as well and provides the motivation for the non-ideal
loss effects studied in Chapter 6.
For the C-D nozzle considered here it is seen that the thrust augmentation
provided by the diverging section is nearly identically cancelled by the thrust
reduction caused by the converging section during early times after the detonation
wave has passed through the nozzle. However, while the diverging section quickly
decays to nearly zero thrust, the converging section continues to negatively impact the
total impulse throughout much of the cycle. Close examination of Figure 4.10 reveals
that the diverging thrust only goes negative very near the end of the cycle, a
characteristic common to the optimal designs in the parametric study. This provides
confidence that the selected expansion area ratio is likely near the optimal point.
In Figure 4.11 the total thrust for the C-D nozzle is plotted as a function of
time. In this plot the simulated data has been shifted forward so that detonation arrival

81
at the nozzle (indicated by the spike near 1 ms) coincides with the experimental data.
In general, the model reproduces the experimental trends well; however, the
magnitude of all features is higher than observed in experiments.
Figure 4.10 Converging-diverging nozzle component thrust comparison of simulation (A) versus experiment (B). Time zero corresponds to ignition and the blowdown is terminated when Phead = 1 atm.
Figure 4.11 Converging-diverging nozzle total thrust comparison of simulation versus experiment. The arrival of the detonation wave at the nozzle has been used to align the features in each plot. Time zero corresponds to ignition in the experimental data only.
0.000 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009
-2000
0
2000
4000
6000
8000
Forc
e (N
)
Time (s)
B
-2000
0
2000
4000
6000
8000
Forc
e (N
)
Head Converging Diverging
A
0.000 0.002 0.004 0.006 0.008 0.010-2000
0
2000
4000
6000
8000
Forc
e (N
)
Time (s)
Simulation Experiment

82
Interestingly, even after the arrival times of the detonation waves at the nozzle
section have been aligned, we see that the arrival of the reflected shock at the head
wall (t ~ 2.5 ms) occurs slightly sooner in the simulation than it does in experiments.
This discrepancy of wave arrival time is attributed to a higher acoustic speed in the
wake of the detonation for the simulation as compared to the experiment in which heat
transfer is occuring. This same explanation accounts for the early arrival of the second
smaller wave reflection occurring at 5 ms as evident in Figure 4.11.
4.4.2.3 Diverging Nozzle In Figure 4.12 the thrust components for the diverging nozzle are plotted as a
function of time. We see a significant contribution to impulse from the diverging
section in this plot. As was the case for C-D nozzle, careful examination of Figure
4.12 reveals that the force on the diverging section only becomes slightly negative at
the end of the cycle. This again is a characteristic common to the optimal designs in
the parametric study. The fact that both nozzle experiments show an expansion area
ratio of 2 to be near the optimal point confirms the conclusion that optimal expansion
ratio is not strongly sensitive to the level of throat obstruction.
In Figure 4.13 the total thrust for the diverging nozzle is plotted versus time.
As before the arrival of the detonation wave at the nozzle section for the simulated
case has been aligned with the experimentally observed arrival time. Again the ability
of the model to reproduce the correct trends is evident, however, at a magnitude higher
than that observed in the experiment. For the case of the diverging nozzle, which has
a very short blowdown time, the total impulse is heavily weighted towards the
contribution from the plateau region. Consequently, the ability to predict impulse for
a diverging nozzle is largely dependent on predicting the plateau conditions at the
head end with high accuracy.

83
4.4.3 Schlieren Imaging Results To aid in the comparison of simulated to experimental data, schlieren imaging
was performed on all three nozzle inserts. During a single run the light source was
Figure 4.13 Diverging nozzle total thrust comparison of simulation versus experiment. The arrival of the detonation wave at the nozzle has been used to align the features in each plot. Time zero corresponds to ignition in the experimental data only.
0.000 0.001 0.002 0.003 0.004 0.005 0.006
0
2000
4000
6000
8000
Forc
e (N
)
Time (s)
Simulation Experiment
Figure 4.12 Diverging nozzle component thrust comparison of simulation (A) versus experiment (B). Time zero corresponds to ignition and the blowdown is terminated when Phead = 1 atm.
0.000 0.001 0.002 0.003 0.004 0.005 0.0060
2000
4000
6000
8000
Forc
e (N
)
Time (s)
B
0
2000
4000
6000
8000
Forc
e (N
)
Head Diverging
A

84
programmed for a 50 μs pulse, and during this time up to 8 separate exposures could
be taken. In order to image the entire blowdown process many runs were necessary
and to ensure repeatability the first and last frames of consecutive runs were
overlapped. For the C-D and diverging nozzles the camera was triggered using the
first pressure transducer in the nozzle section. Using this procedure resulted in
excellent repeatability since the duration of the DDT process is the least repeatable
event, and this took place before the camera was triggered. More care needed to be
taken with the straight-tube configuration since a transducer port was not available
close to the nozzle. In this section the focus will be on blowdown gasdynamics and its
relevance to Isp prediction is deferred until the final section.
4.4.3.1 Straight Tube In Figure 4.14 an 18 frame schlieren imaging sequence is shown beginning
with the arrival of the detonation wave in the nozzle section and concluding with fully
turbulent channel flow at the end of the cycle. From 1.07 – 1.08 ms we see the
detonation front entering and traversing to the center of the viewable section. Behind
the detonation front we see a series of intersecting oblique shock waves which are
stationary relative to the detonation front. The existence of this oblique pattern has
been observed previously by Edwards et al. (1963) and their origin still remains
uncertain. An especially intriguing result arising due to the existence of this wave
pattern is that flow in this region must be supersonic relative to the detonation front.
According to C-J theory this would require the detonation wave to exist on the weak
branch of the Rankine-Hugoniot curve which is forbidden by conventional entropy
arguments. However, the turbulent structure hypothesis of White (1961) predicts the
existence of supersonic flow behind the detonation front. In his paper, White shows
that the addition of turbulent terms to the conservation equations precludes the
existence of an exact C-J state as defined by the point of tangency between the
Rankine-Hugoniot and the Rayleigh line. Once the tangency condition is removed the
arguments that support the inexistence of weak detonations become invalid.

85
Using White’s hypothesis, Edwards et al. (1963) suggest the oblique shock
pattern is formed because of a large pressure gradient across the boundary layer in the
reaction zone behind the detonation front. The pressure gradient is established
because the reaction rate in the cool boundary layer is slower than that of the core
flow, thus maintaining the boundary layer closer to the von Neumann pressure, while
Figure 4.14 Straight-tube blowdown image sequence. Numbers above each frame indicate time in milliseconds from ignition. Knife edge is oriented vertically such that right-moving shocks appear darker.
1.550 1.620 1.8001.550 1.620 1.800
1.115 1.330 1.5001.115 1.330 1.500
1.100 1.105 1.1101.100 1.105 1.110
1.085 1.090 1.0951.085 1.090 1.095
1.070 1.075 1.0801.070 1.075 1.080
5.000 6.000 7.0005.000 6.000 7.000
1.550 1.620 1.8001.550 1.620 1.800
1.115 1.330 1.5001.115 1.330 1.500
1.100 1.105 1.1101.100 1.105 1.110
1.085 1.090 1.0951.085 1.090 1.095
1.070 1.075 1.0801.070 1.075 1.080
5.000 6.000 7.0005.000 6.000 7.000

86
the core flow has reacted sufficiently to approach the C-J state. Provided the flow is
supersonic relative to the detonation front, this pressure differential could cause
sufficient perturbation to generate the oblique shock pattern observed in Figure 4.14.
An alternate theory, originally proposed by Desbordes et al. (1983), is that the
detonation front propagates spherically from its point of initiation and the curvature of
the front leads to transverse reflection near the wall and formation of the X-shaped
waves. Numerical simulations of a point initiated detonation wave in an axisymmetric
geometry lend support to this hypothesis (see Appendix C), however as the wave front
becomes planar further front its initiation point the X-wave pattern detaches from the
front. Thus, some mechanism must be present to maintain the curvature of the shock
front near the wall. The round-to-square transition in the experimental facility used
here is suspected to provide the necessary perturbation to maintain such curvature.
Whatever the exact cause of the oblique shock pattern, it is clear that the strong
reflected shock which comes into view at 1.085 ms is preventing the pattern from
propagating further upstream. This strong reflected normal shock (reflected
retonation) was described previously and is generated by the large pressure differential
established between the flow behind the right-moving detonation front and the low
pressure wake in the DDT region. Additional discussion of the X-waves and
retonation can be found in Appendix C.
After the detonation wave and reflected normal shock have exited the tube a
brief period of shock-free flow is established until at 1.5 ms a set of left-moving
oblique shocks translate upstream, most likely resulting from the diffraction of the
exiting detonation wave. Due to the orientation of the knife edge, left-moving shocks
will appear lighter and right-moving shocks will appear darker. These structures
reside in the nozzle section until they move out of the left edge at 1.62 ms. The
blowdown continues until at 5 ms turbulent boundary layer separation begins to occur
along the top and bottom surfaces of the channel. By 7 ms seconds the channel flow
has become fully turbulent. Simulation results suggest that reverse flow, or suction of
exhaust gases back into the tube, does not occur until several milliseconds after the
last frame shown. The turbulent channel flow is suspected to arise when the boundary

87
layer flow separates due to an adverse pressure gradient which begins to form at the
end of the cycle prior to reverse flow.
4.4.3.2 Converging-Diverging Nozzle In Figure 4.15 the passage of the detonation wave through the C-D nozzle with
the knife edge oriented horizontally is shown. The viewable portion of C-D nozzle
was indicated in Figure 4.7. The knife edge has been rotated to this orientation to
resolve the system of transverse reflections occurring due to the interaction of the
detonation wave with the converging section. The knife edge is positioned in such a
fashion that upward-moving shocks will appear lighter while downward-moving
shocks will appear darker.
The passage of the detonation through the converging section generates two
strong opposing shock waves which intersect each other and proceed to reflect
transversely back-and-forth across the nozzle section. Note that these transverse
waves obscure the appearance of the oblique shock pattern observed in the straight
tube. Due to the curvature of these waves and the presence of the diverging section,
the downstream part of the same reflected wave will complete its second reflection
Figure 4.15 Converging-diverging nozzle detonation passage sequence. Numbers above each frame indicate time in milliseconds from ignition. Knife edge is oriented horizontally such that downward-moving shocks appear darker.
1.075 1.081 1.087
1.057 1.063 1.069
1.075 1.081 1.087
1.057 1.063 1.069

88
before the upstream part. This leads to the inflection point visible near the center of
the 1.075 ms frame. Strong expansion fans emanating from the throat section indicate
the presence of choked flow in the nozzle immediately after detonation passage. The
asymmetry of the shading of these expansion fans across the nozzle section is due to
the horizontal knife edge orientation. Careful examination of the 1.063 and 1.069 ms
frames also reveals the propagation of small acoustic disturbances from the location of
the pressure transducer ports. Frames from the entire blowdown with a vertical knife
edge orientation are given below.
The first six frames of Figure 4.16 were taken at identical times to those in
Figure 4.15 with the only difference being the orientation of the knife edge, which is
vertical for the later figure. The vertical knife edge orientation reveals several new
slip lines and also makes the reflected normal shock visible. After the reflected shock
exits the nozzle at 1.102 ms, the unsteady starting process begins. The 1.122 ms frame
reveals a system of oblique shock waves coalescing into a normal shock at the
intersection of the lead mach waves emanating from the expansion fan. Just
downstream of this feature two additional oblique shock waves form at the walls of
the diverging channel. The upstream feature develops into a normal shock which is
pushed downstream and merges with the second shock system, forming a single,
strong normal shock near the exit of the nozzle as shown in the 1.192 ms frame.
Strong, turbulent flow separation is evident behind this shock structure. After 1.487
ms the normal shock weakens and is pushed out of the nozzle at 1.587 ms. Shock-free
flow is persists in the nozzle until at 4.237 ms turbulent boundary layer separation
begins to occur in the diverging section. At 5.237 ms a nearly-normal shock wave is
just visible in the turbulent region at the exit of the nozzle. As part of the nozzle
unstarting process the normal shock is sucked upstream into the throat at which point
the nozzle unchokes and becomes fully turbulent at 8.237 ms.

89
4.4.3.3 Diverging Nozzle In Figure 4.17 the blowdown sequence for the diverging nozzle is shown. The
oblique shock pattern is again present in this case until the arrival of the reflected
shock at 1.075 ms. Expansion waves are evident at the start of the diverging section
Figure 4.16 Converging-diverging nozzle blowdown image sequence. Numbers above each frame indicate time in milliseconds from ignition. Knife edge is oriented vertically such that right-moving shocks appear darker.
6.237 7.237 8.2376.237 7.237 8.237
1.192 1.487 1.5871.192 1.487 1.587
1.102 1.122 1.1521.102 1.122 1.152
1.075 1.081 1.0871.075 1.081 1.087
1.057 1.063 1.0691.057 1.063 1.069
3.217 4.237 5.2373.217 4.237 5.237
6.237 7.237 8.2376.237 7.237 8.237
1.192 1.487 1.5871.192 1.487 1.587
1.102 1.122 1.1521.102 1.122 1.152
1.075 1.081 1.0871.075 1.081 1.087
1.057 1.063 1.0691.057 1.063 1.069
3.217 4.237 5.2373.217 4.237 5.237

90
immediately after the passage of the detonation wave (1.065 ms) indicating choked
flow.
Figure 4.17 Diverging nozzle blowdown image sequence. Numbers above each frame indicate time in milliseconds from ignition. Knife edge is oriented vertically such that right-moving shocks appear darker.
5.077 5.577 6.0775.077 5.577 6.077
1.297 1.437 1.4971.297 1.437 1.497
1.093 1.137 1.2071.093 1.137 1.207
1.075 1.080 1.0851.075 1.080 1.085
1.060 1.065 1.0701.060 1.065 1.070
1.687 1.807 4.5971.687 1.807 4.597
5.077 5.577 6.0775.077 5.577 6.077
1.297 1.437 1.4971.297 1.437 1.497
1.093 1.137 1.2071.093 1.137 1.207
1.075 1.080 1.0851.075 1.080 1.085
1.060 1.065 1.0701.060 1.065 1.070
1.687 1.807 4.5971.687 1.807 4.597

91
After the reflected shock exits the tube at 1.093 ms the nozzle starting process
begins. At 1.137 ms two oblique shock waves form just downstream of the expansion
fan. Similar to the C-D nozzle, at 1.207 ms the aforementioned oblique shock waves
have coalesced into a normal shock which is pushed downstream and merges with the
second shock structure present at the exit to form a single strong normal shock.
Again, the presence of turbulent, separated flow behind the normal shock is evident.
Interestingly, at 1.437 ms two weaker oblique shock structures are again visible and
proceed to intersect at 1.497 ms before a normal shock forms and is expelled from the
nozzle at 1.687 ms. It appears the downstream oblique shock structure at 1.437 ms
may again be the result of detonation diffraction at the tube exit. Shock-free flow
persists in the nozzle until at 4.597 ms two oblique waves form at exit of the nozzle
inducing turbulent separated flow. The unstarting process progresses with the normal
shock being sucked into the throat at 5.077 ms after which the flow proceeds to
become fully turbulent in the nozzle section.
4.4.4 Specific Impulse Results
The discussion of simulated versus measured specific impulse with regard to
each of the three nozzle configurations has been deferred until now so that the results
can be considered in light of the flow visualization results. Uncertainty estimates
given for measured Isp are computed based on the standard deviation between all
values in the data set used to construct the mean values presented in Table 4.1.
First, it is of interest to compare the magnitude of the results given for the
straight tube in Table 4.1 to those readily available in previous studies. The computed
straight-tube Isp of 178 s agrees exactly with the results presented in Barbour et al.
(2004). The experimental result for the straight tube differs notably from that
presented by Cooper et al. (2002). This discrepancy is primarily a result of enhanced
wall losses in our facility which has an L/D=42 versus Cooper’s facility which has an
L/D=10. These wall losses will be considered further in Chapter 6.

92
The results in Table 4.1 confirm several results presented in the parametric
study. Most importantly, the experiments confirm that single-cycle Isp for the
diverging nozzle in unequivocally higher (13%) than for the C-D nozzle and the
straight tube. This confirms that a diverging nozzle with a nearly optimal expansion
area ratio can outperform the straight-tube case even at high back pressure.
Additionally, we see that the nearly optimally expanded C-D nozzle at least matches,
if not exceeds the impulse generated by the straight tube.
For all three nozzles, the single-cycle blowdown time predicted by the Q1-D
model is within 10% of the experimental value. This suggests that the turbulent
structure and viscous nozzle separation phenomena occurring near the start and end of
the blowdown do not need to be resolved to make an accurate prediction of blowdown
time
The simulated total Isp data presented in Table 4.1 are in all cases above that
observed in the experiment. The Isp for the straight tube is over predicted by 28%, the
C-D nozzle by 25%, and the diverging nozzle by 20%. These discrepancies are the
result of several effects. The first effect is that the simulations undergo direct
initiation while the experiments do not. In order to quantify the effect of direct
initiation on Isp, the additional plateau region, occurring in the simulated results, was
subtracted and the Isp was recomputed. The result revealed that in each case 7-9% of
the cited discrepancy can be attributed to direct initiation. The remaining
Nozzle Insert Isp Head (s)
Isp Conv. (s)
Isp Div. (s)
Isp Total (s)
tcycle (ms)
Straight (exp) 140 0 0 140 +/- 5 6.3 Straight (sim) 178 0 0 178 6.2 C-D (exp) 167 -41 15 141 +/- 5 8.2 C-D (sim) 226 -62 13 177 8.9 Diverging (exp) 131 0 28 159 +/- 5 6.0 Diverging (sim) 163 0 26 189 5.7 Table 4.1 Comparison of measured and computed single-cycle Isp for each nozzle. Rows shaded in gray contain experimental measurements and non-shaded rows contain simulated results. Simulations are performed with direct initiation while experiments have a finite DDT distance. The total impulse used to evaluate each Isp is evaluated over a single tcycle. (Pfill = Pamb = 1 atm)

93
disagreement is due to the inability of the model to correctly capture the plateau
pressure. As discussed previously, this is primarily due to wall losses which will be
addressed in Chapter 6.
Another effect, which merits special attention for 1-D simulations, is the effect
of the exit boundary condition on the resulting impulse. As discussed by Kailasanath
and Patnaik (2000), the treatment of the exit boundary can have a significant impact
on the rate at which the pressure in the plateau region relaxes back to the ambient
value. In the case of the straight-tube configuration it is possible that some
discrepancy can be attributed to the zero-relaxation-length pressure boundary
condition (used for subsonic outflow), and the specification of sonic flow directly at
the exit plane (used for supersonic outflow). This effect is expected to be minor
considering the general shape of the experimental relaxation observed in Figure 4.9 is
captured well by the model. The role of the boundary condition for the C-D and
diverging nozzles is also expected to have very little impact on the resulting impulse.
In both of these nozzles the flow remains supersonic at the exit throughout the first
80% of the cycle, and during this time the boundary condition is entirely determined
by the internal domain. As evident in Figures 4.10 and 4.12, during the last 20% of
the cycle very little is contributed to the total impulse and the zero-relaxation-length
pressure boundary condition is not expected to have an appreciable effect.
Table 4.1 also reveals a large deviation between measured and computed
values of head and converging section Isp for the C-D nozzle. The fact that the
predicted total Isp deviates from the experiment to the same extent as the other two
nozzles is fortuitous since the over-prediction at the head wall is offset by the over-
prediction of the negative contribution at the convergent section. This deviation is due
to the inaccuracy of the Q1-D model in predicting a wave reflection event which is
truly multi-dimensional. As evident in Figures 4.15 and 4.16, a large fraction of the
energy from the detonation wave reflection off of the convergent section goes into the
system of transverse waves reflecting back-and-forth across the nozzle channel. The
reflection of these waves off the nozzle surface produces only a small thrust
component in the axial direction. This would account for why the measured

94
convergent Isp is much lower in absolute magnitude than the simulated value. This
same effect also controls the strength of the reflected wave which travels back towards
the head wall. The Q1-D model is predicting much too strong of a reflected wave
since much of this energy is in reality lost in the formation of the transverse shock
waves.
The diverging section Isp is well predicted for both the C-D and diverging
nozzles since the impulse here is not strongly dependent on accurate resolution of any
axial shock reflections. The fact that experimental value is actually slightly higher
than the simulated value in the diverging section suggests that the transverse wave
phenomenon that goes unresolved in the Q1-D model may actually have a small effect
on the impulse.
4.5 Conclusions A Q1-D, Euler model, with detailed chemistry was used to study the effects of
area ratio on unsteady nozzle performance in a PDE. The results indicate that the
contraction area ratio, which largely controls the duration of a single cycle as well as
the average pressure and Mach number of the gases at the end of the cycle, will
ultimately need to be designed using a detailed multi-cycle analysis model. In general,
due to the necessity to maintain high reactant fill pressures and the superior single-
cycle performance of diverging nozzles, it is expected that the optimal contraction area
ratio will have the minimum throat obstruction required to achieve the desired reactant
state between cycles. Alternative refilling schemes will be an important area of future
investigation since the magnitude of the performance enhancement provided by
nozzles is critically dependent on achieving a high value of Pfill/Pamb.
Results from the parametric study indicate that the optimal expansion area ratio
can be identified accurately by performing an isentropic analysis based on the time-
averaged, head-wall, stagnation pressure for a given PDE geometry. This stagnation
pressure is most strongly a function of the contraction area ratio, however, it was
shown that the Po,avg value from the straight-tube provides a valid reference point for

95
approximating optimal expansion area ratios even for nozzle geometries with
contraction ratios other than unity.
Time-resolved impulse measurements were made at each thrust surface and
compared to simulation results. The largest deviations between simulated and
experimental results are due to the inability of the model to capture the DDT event and
the exact plateau pressure behind the detonation front. Non-ideal, wall losses will be
shown to be the source of this discrepancy in Chapter 6.
The nozzle performance trends highlighted in the simulation results are
consistent with findings in the experimental data. Appropriately optimized diverging
nozzles can be designed to outperform the straight-tube geometry even at high back
pressures. In accordance with the parametric study, experimental data reveal that an
optimized diverging nozzle produces the highest single-cycle Isp.
Schlieren imaging of the blowdown event was performed in three separate
nozzle geometries. The results of the imaging in comparison to impulse data reveal
that while the Q1-D model adequately captures the essential gasdynamics in straight
tubes and diverging nozzles, it is less adept at capturing the magnitude of shock wave
reflections occurring in nozzles with a convergent section. This deficiency results
from the inability of the model to resolve the 2-D nature of the wave structure visible
in the schlieren images. In the next chapter the multidimensional nature of the
detonation front will be considered in detail. Additionally, it will be shown that
multidimensional detonation structure is not at the root of the discrepancies between
measured and computed head wall forces observed in this chapter.

96

97
Chapter 5: Multidimensional Detonation Structure
5.1 Introduction In the modeling presented up until this point the true multidimensional
structure of real detonation waves has been neglected. Instead, the focus has been on
using the Q1-D version of the more complete, multidimensional model presented in
Chapter 2. While the Q1-D model is certainly an approximation of the true physics, it
has nevertheless shown great utility in reproducing the burned gas velocity
measurements in Chapter 3 and at least the qualitative trends in the nozzle
optimization work of Chapter 4. Due to the computational burden of incorporating
detailed chemical kinetics into an unsteady, multidimensional flow simulation it would
have been cumbersome to study either of these problems with the more complete
version of the model. In this chapter, however, there are two objectives that do require
the use of the full multidimensional model. The first objective is to demonstrate the
utility of the full model for predicting realistic multidimensional detonation structure.
The second objective is to consider whether resolving the multidimensional structure
is necessary in order to make accurate impulse predictions in detonation tubes.

98
5.2 Background & Fundamentals The transverse structure of a detonation wave can exhibit dramatically
different behavior for different reactants. While all detonation waves are unstable in
the traverse direction, some show a much greater degree of instability than others.
Consequently, detonations can be broadly characterized as either weekly unstable or
highly unstable with varying degrees of instability between these two extremes. The
degree of instability depends primarily on the sensitivity of the chemical energy
release to temperature perturbations in the reaction zone. Small transverse oscillations
in the detonation Mach number result in temperature gradients which subsequently
lead to varying rates of chemical energy release. The transversely varying chemical
energy release is responsible for the formation of pressure gradients which drive
transverse waves. Since reaction rates have an Arrhenius form (see Equation 2.43),
the temperature sensitivity, and thus the degree of instability, is ultimately governed
by the global activation energy of the mixture. Experimental schlieren images taken
by Austin (2003) illustrating both weakly unstable and highly unstable propagation
modes are shown in Figure 5.1.
Figure 5.1 Schlieren images from Austin (2003) demonstrating weakly unstable and highly unstable propagation modes in frames (a) and (b), respectively. Frame (a) is a stoichiometric, H2-O2 mixture with 85% Ar dilution at P1=20 kPa. Frame (b) is a stoichiometric C3H8-O2 mixture with 60% N2 dilution at P1=20 kPa.
(a) (b)(a) (b)

99
For weakly unstable detonation waves propagating in narrow rectangular
channels a repeatable, approximately 2-D shock structure is established. This shock
structure is characterized by the intersection of a Mach stem, an incident shock, and a
transverse shock wave. This intersection is commonly refereed to as the triple point
(or primary triple point) and is illustrated in Figure 5.2. Also emerging from the
primary triple point is a shear layer which separates gas that has been processed by the
Mach stem from gas that has been processed by the incident and transverse shock
waves. The triple point is not a stationary structure, and instead moves transversely
across the channel until it either reflects off a wall or off another triple point. Figure
5.2 illustrates a case in which the triple point is moving downwards. After a triple
point undergoes reflection a new Mach stem is formed due to the high pressure
collision event, while the previous Mach stem weakens to form a new incident shock.
As the triple points move up and down across the channel they trace out a
characteristic diamond shaped pattern as illustrated in Figure 5.3.
The left and right vertices of the diamond correspond to the collision of two
triple points, while the upper and lower vertices result from triple point collisions with
the wall. Triple point trajectories are commonly recorded experimentally by placing
Figure 5.2 Triple point structure for weakly unstable detonation. Left side of figure highlights major elements of front structure while right side shows a numerical computation of density gradient (Equation 5.1).
Shear layer
Reaction front
Incident shock
Mach stem
Primary triple point
Secondary triple point
Transverse wave
Ignition length
Shear layer
Reaction front
Incident shock
Mach stem
Primary triple point
Secondary triple point
Transverse wave
Ignition length

100
soot covered foils on the walls of the detonation facility. As the detonation traverses
the foil, the triple points scrub away soot leaving a visible record of their trajectory.
The resulting pattern left on the soot foil is commonly referred to as the cellular
structure of the detonation wave and single cell cycle corresponds to one of the
diamond patterns in Figure 5.3. Different mixtures have different preferred spacing
between triple points and consequently leave a different number of cellular structures
across the transverse dimension of the soot foil. The regularity of the cellular structure
is naturally dictated by the level of instability of the mixture.
There are several other features of interest in Figure 5.2. The fine dotted line
indicates the reaction front and represents the plane at which chemical reaction
commences. The ignition delay distance is dependent on the level of compression and
heating achieved by the shock front and is shorter behind stronger waves. The close
proximity of the reaction front to the Mach stem reveals the larger strength of this
wave relative to the incident shock. Another feature of interest in Figure 5.2 is the
secondary triple point. This particular feature is not present throughout the entire cell
cycle, but instead appears in between triple point collisions.
For highly unstable mixtures the basic flow structures discussed above are still
present, however the triple point trajectories are much less repeatable and they trace
Figure 5.3 Dotted lines show trajectory of primary triple points as the detonation propagates from left to right. Diamond patterns like that illustrated here are recorded experimentally by placing soot-covered foils on the walls of the detonation tube. As the triple points traverse the soot foil they scrub off patterns indicating their path of motion.

101
out irregular soot foil records. Unstable mixtures are also characterized by localized
explosions near the shock front and pockets of unburned gas that ignite further behind
the shock front due to turbulent mixing with burned products. A detailed
understanding of irregular detonation structure is much less well-developed than for
regular detonations. While the subject of this thesis is not detonation structure, the
purpose in this chapter is to demonstrate the ability of the developed model to
elucidate the complex fluid-chemical interactions in these types of systems.
5.3 Numerical Implementation In this work stoichiometric H2-O2 combustion will be considered and the
degree of instability will be controlled by adjusting the level of argon dilution. For
both cases considered, the initial pressure and temperature of the reactants is set to
6.67 kPa and 298 K, respectively. Low pressure mixtures of this type are traditionally
chosen in studies of detonation structure because the reaction zones are large enough
to resolve both experimentally and numerically. Hydrogen-oxygen combustion is
chosen because the chemical kinetics are relatively well understood and can be
described by the smallest number of participating species and elementary reactions.
Since the model contains a conservation equation for each chemical species this
simplicity leads to a substantial savings in computational effort relative to modeling
combustion with more complex hydrocarbons. In this work the H2-O2 mechanism
developed by Westbrook (1982) is used, which consists of 17 reversible reactions
amongst 9 species (including Ar).
Two model problems will be discussed which are representative of a weakly
unstable and a highly unstable detonation. The general strategy used for both cases is
to perform simulations in a reference frame moving at the average detonation wave
speed (VCJ). In this reference frame the detonation front will move both forwards and
backwards from its initial position as its speed oscillates about VCJ. The advantage of
this quasi-shock-fixed frame is that that the simulation domain can be significantly
reduced in length compared to that required to simulate the detonation in the

102
laboratory frame. This quasi-shock-fixed frame technique has been successfully used
in the past by Deiterding (2003).
As depicted in Figure 5.4, the solution is initialized in the quasi-shock-fixed
frame by placing the 1-D ZND solution onto the 2-D grid and assuming unburned
reactants enter the inflow boundary traveling at VCJ. The toolset developed by Browne
and Shepherd (2005) is used to construct all ZND solutions discussed henceforth. The
shock front is offset sufficiently far from the inflow boundary to insure the detonation
does not race out of the domain during any portion of its cell cycle. An elevated
temperature and pressure is applied in a small rectangular region behind the detonation
front as described by Oran et al. (1998) in order to accelerate the development of the
transverse instability. The top and bottom walls are specified to be symmetry lines,
while the outflow boundary is specified by extrapolating the last interior grid point;
which is physically reasonable for this case since the flow is choked at the outflow
plane. The initial condition is marched forward in time until the transverse wave
structure develops. For both cases presented in this section the diffusive transport
terms in the full model have been disabled, as it was determined that their inclusion
did not appreciably affect the observed detonation structure but did augment the
computational expense. Additional details and results for each of the two cases will be
presented next.
Figure 5.4 Initial condition for detonation structure simulations in the quasi-shock-fixed frame.
Symmetry Line
Solid Wall
Out
flow
Inflo
w
reactants
T = 298 K
P = 6.67 kPa
w = - VCJ m/s1-D ZND Profile
High temperature & pressure perturbation
L
H
Symmetry Line
Solid Wall
Out
flow
Inflo
w
reactants
T = 298 K
P = 6.67 kPa
w = - VCJ m/s1-D ZND Profile
High temperature & pressure perturbationSymmetry Line
Solid Wall
Out
flow
Inflo
w
reactants
T = 298 K
P = 6.67 kPa
w = - VCJ m/s1-D ZND Profile
High temperature & pressure perturbation
L
H
103
5.4 Weakly Unstable Detonation A weakly unstable propagation mode is generated by considering a
stoichiometric H2-O2 detonation diluted with 70% Ar. This mixture is injected at the
inflow boundary at VCJ = 1626.9 m/s. The domain size is set to be 10 cm in the
longitudinal direction by 3 cm in the transverse direction and a 1000 x 200 uniformly
spaced grid is utilized. This particular mixture has been studied previously in the
literature [Oran et al. (1998); Eckett (2001); Deiterding (2003)] and serves as a
benchmark problem for the multidimensional model.
The transverse domain width was chosen to be the height of one detonation
cell and the longitudinal grid spacing places 18 grid points in the ZND predicted
reaction zone (Δ1/2). Previous studies have shown that sufficient resolution can be
achieved in numerical simulations when between 10 and 50 grid points are placed in
the ZND reaction zone [Oran et al. (1998); Deiterding (2003); Sharpe (2001); Hwang
(2000)]. It is conventional to specify grid resolution in terms of the ZND reaction
zone, despite the fact that realistic, unsteady, cellular detonations can have reactions
zones significantly smaller than in the ZND approximation. Here the reaction zone is
interpreted in the context of the 1-D ZND model as the distance behind the shock front
at which the mole fraction of the fuel has dropped to half its initial value. Grid
resolution studies were performed to ensure the predicted detonation structure is
independent of grid resolution.
In Figure 5.5 a time sequence is shown of the detonation as it evolves through
one cell cycle with a 4 μs time step between each row. The eight frames on the left
side of the figure are a normalized plot of the density gradient as described by
Equation 5.1:
⎟⎟⎠
⎞⎜⎜⎝
⎛
∇∇
−=∇max
expρ
ραρschlieren (5.1)

104
The plotted quantity gives a schlieren-like appearance, in which the contrast
can be adjusted by modifying the constant α. In the remaining columns are plots of
pressure (atm), temperature (K) and XOH.
Figure 5.5 Weakly unstable detonation completing one cell cycle. Mixture composition: Φ=1, H2-O2, 70% Ar , P1=6.67 kPa, T1=298 K. Inter-frame time step is 4 μs. First column represents a schlieren-like plot of the density gradient. The second column is pressure (atm), the third is temperature (K), and the fourth is XOH.
0 μs
4 μs
8 μs
12 μs
16 μs
20 μs
24 μs
28 μs
0 μs
4 μs
8 μs
12 μs
16 μs
20 μs
24 μs
28 μs
0 μs
4 μs
8 μs
12 μs
16 μs
20 μs
24 μs
28 μs

105
The sequence begins in the first row at an instant in time just after two triple
points have collided at the center of the frame. As a result of the high pressure
collision a new Mach stem emerges and propagates radially outward. Behind the
strong Mach stem the temperature is very high and the OH radical pool builds as H2 is
oxidized in the reaction zone. In contrast to the high temperature and OH
concentration a short distance behind the Mach stem, there is relatively low
temperature and no OH at the same distance behind the nearly-planar incident shock.
In the third row of Figure 5.5 the reaction front is clearly present a short
distance behind the Mach stem. As the triple points continue to move toward the top
and bottom boundaries, the Mach stem weakens and the ignition distance increases. A
local area of high pressure is also evident behind the transverse wave in the triangular
region bounded by the reaction front.
In the fifth row the triple points have just undergone reflection with the walls
and are now moving towards the center of the channel. During reflection the slip line
that was attached to the triple point is shed and convected downstream. The wall
reflection event has generated a new Mach stem, while the Mach stem from the initial
collision event has weakened and now become the incident shock. The transverse
wave associated with new Mach stem and triple point has now also inverted its angle
relative to its state before the wall reflection. The triple points continue moving
towards the center of the tube until they collide for a second time and a new cell cycle
is started. The results shown here are in excellent agreement with previously
mentioned studies and the results validate the ability of the model to predict realistic
detonation structure.
5.5 Highly Unstable Detonation A highly unstable detonation is generated by considering a stoichiometric H2-
O2 mixture with no argon dilution. In this case the reactants are injected at the inflow
boundary at VCJ = 2690.8 m/s. Due to the decreased level of argon dilution the ZND
reaction zone length for this mixture is approximately 60% that of the previous case.

106
The simulation domain for this problem is a rectangular box which is 3 cm across and
6 cm long. The longitudinal coordinate has been decreased in proportion to the
reduced reaction zone length compared to the weakly unstable case. Due to the need
for increased reaction zone grid resolution relative to the previous case, non-constant
grid spacing is used in the longitudinal direction. A compound x-grid is constructed
consisting of 200 equally spaced points over the first 1 cm nearest the inflow plane
and another 300 points exponentially stretched towards the outflow plane. The
transverse axis is discretized using 400 equally spaced mesh points. The specified
grid places 20 points in the ZND reaction zone, which easily meets the nominal
requirements for stable detonations; however, a similar criterion for unstable
detonations is not well established and the results presented are not purported to be
fully grid independent. Nevertheless, the major structural features observed
previously in unstable detonation experiments by Austin (2003) and Radulescu et al.
(2005) are clearly evident.
A time sequence of the computed detonation structure is shown in Figure 5.6.
As before, the rows are spaced in 4 μs intervals, and the first through fourth columns
corresponds to a schlieren-like density gradient, pressure (atm), temperature (K) and
XOH, respectively. Unlike the previous case, a well defined and repeatable cell cycle is
not apparent. Instead of just two triple points moving across the transverse axis, there
are now many, and there is no longer a single characteristic time between collision
events. Rather than track the evolution of a specific set of triple points, which would
require very fine time spacing between frames, the objective here is to look at several
global features which distinguish this case from the weakly unstable case.
The first striking feature present in Figure 5.6 is the occurrence of localized
explosions occurring at the detonation front. One such localized explosion is clearly
visible just above the centerline in the first row of images. This feature is very similar
to that observed in the irregular detonation experiment of Figure 5.1b. One proposed
mechanism for the formation of localized explosions is the collision of triple points
which results in a hot spot that can spontaneously ignite any unburned reactants.

107
Figure 5.6 Highly unstable detonation sequence. Mixture composition: Φ=1, H2-O2 , P1=6.67 kPa, T1=298 K. Inter-frame time step is 4 μs. First column represents a schlieren-like plot of the density gradient. The second column is pressure (atm), the third is temperature (K), and the fourth is XOH.

108
Radulescu et al. (2005) suggest a secondary mechanism for the spontaneous
formation of localized explosions based on their experimental results. In his work it is
suggested that high levels of vorticity are produced due to Richtmyer-Meshkov
instabilities resulting from pressure wave interactions with density gradients at
burned/unburned gas contact surfaces. The strong vorticity leads to localized mixing
of hot burned gases and cool reactants possibly setting up an induction delay gradient
which is the fundamental building block of the shock wave amplification by coherent
energy release (SWACER) mechanism proposed by Lee et al. (1980). It is postulated
that this is a necessary precursor to generation of localized explosions.
Yet another distinguishing feature evident in Figure 5.6 is the occurrence of
isolated pockets of unreacted gas that exist downstream of the detonation front. The
best example of such a feature is evident in the third row images. In both the
temperature and XOH plots a kernel of unreacted gas is visible just above the
centerline. The formation of these pockets occurs when the reaction front becomes
sufficiently detached from the shock front before a collision event. The events leading
up to the formation of such a pocket due to a triple point/wall collision is evident near
the bottom surface of the upper left schlieren image. In this frame the reaction front
lags behind the incident shock and a kernel of unreacted gas is being enclosed as the
triple point moves towards the wall. After reflection, part of the unreacted kernel gets
consumed but the remainder exists as an isolated island until it is burned further
downstream. The rapid burning of these pockets of reactants is yet another
mechanism for the spontaneous formation of localized explosions.
5.6 Effect on PDE Impulse Although the low pressure mixtures considered above are not of practical
interest to the PDE community, it is of interest to consider whether neglecting the
detailed multi-dimensional structure of realistic detonations could impact performance
predictions. In order to investigate this effect, the results from the two cases above
were translated to the laboratory frame and a closed end-wall was imposed at the left

109
boundary. The detonation was then allowed to propagate down the channel while the
pressure was recorded at the end wall. Results from the multidimensional simulations
are compared to results from 1-D simulations of the same mixture in order to reveal
whether the transverse structure affects impulse.
In order to construct the 2-D initial condition for the weakly unstable mixture
the established periodic solution from the quasi-shock-fixed frame was cropped from
the start of the detonation front to 43 mm behind the detonation front. Next, the axial
velocity is shifted to the laboratory frame and the associated momentum and kinetic
energy terms in the conserved variables are adjusted accordingly. The resulting
solution is placed adjacent to the end wall boundary condition with the detonation
front propagating away from the wall. The grid resolution used in the quasi-shock-
fixed frame solutions is maintained in these laboratory frame simulations. For the 1-D
simulations the solution is initialized similarly by shifting the steady ZND solution
into the lab frame. The detonation front for both 1-D and 2-D simulations is placed
the same distance from the end wall.
At the start of the simulation a very steep expansion wave is generated at the
end wall which rapidly decreases the pressure from the quasi-shock-fixed frame value
(~PCJ). This rarefaction continues to widen until it catches up to the detonation wave
and produces the familiar Taylor wave profile followed by a plateau region. The
pressure field from both 2-D and 1-D simulations is presented in Figure 5.7 and the
corresponding 2-D schlieren images are shown in Figure 5.8.
As evident the centerline pressure from the 2-D simulations is quite different
from the 1-D pressure profiles. The lower wave front pressures observed in the 40 μs
and 80 μs frames are due to the gasses being processed by a relatively weak incident
shock at the centerline. Conversely, the large pressure spikes near the detonation front
in the 120 μs and 152 μs frames are due to transverse wave collisions. Despite the
differing pressure profiles, both models reveal the average wave speed to be consistent
with C-J theory.

110
In Figure 5.9 the head pressure is plotted for both the 1-D and 2-D simulations
as a function of time. The time integral of this curve represents the impulse per unit
a
b
c
d
e
a
b
c
d
e
Figure 5.8 Schlieren-like plot of detonation propagation in laboratory reference frame. Frame a) 0 μs, b) 40 μs, c) 80 μs, d) 120 μs, e) 152 μs. Mixture is stoichiometric H2-O2 with 70% Ar dilution at P1=6.67 kPa, T1=298 K.
Figure 5.7 Centerline pressure from a) 2-D simulation versus b) 1-D simulation.
a ba b

111
area. The 2-D result is constructed by taking the spatially-averaged pressure over the
end wall. The small perturbation in the 1-D profile at 80 μs originally arises just
behind the detonation front at the beginning of the simulation and then travels back
towards the head wall. It is believed to be a startup transient caused by the use of a
steady ZND initial condition.
The most important conclusion to draw from Figure 5.9 is that the 1-D result
effectively represents an average of the 2-D result. This indicates that transverse wave
effects in this weakly unstable mixture have a negligible impact on impulse. The
time-averaged, head-wall pressures predicted in both simulations are within 0.06% of
one another. This is an encouraging result which justifies the use of relatively
inexpensive 1-D simulations for the purpose of performance prediction.
An interesting side point with regard to Figure 5.9 is that the small positive
slope evident in the simulated results is caused by a chemical non-equilibrium effect.
Fluid particles closest to the end wall undergo the most rapid expansion as evident
Figure 5.9 Comparison of 1-D versus 2-D (spatially-averaged) head wall pressure. The mixture is stoichiometric H2-O2 with 70% Argon dilution at P1=6.67 kPa and T1=298 K.
0 20 40 60 80 100 120 140 160
0.30
0.32
0.34
0.36
0.38
0.40
Hea
d P
ress
ure
(atm
)
Time (μs)
1-D Simulation 2-D Simulation
equilibrium theory
frozen theory

112
from the large slope of the expansion wave visible in Figure 5.7a/b at early times. The
expansion is so rapid that the chemistry is effectively frozen as a fluid particle is
decelerated into the plateau region. As the expansion wave moves further from the
closed wall it widens sufficiently such that chemical reaction time scales are now
similar in magnitude to the gasdynamic time scale. As demonstrated by Wintenberger
(2004) the head pressure is higher when a fluid particle travels through the Taylor
wave along an equilibrium isentrope than when it travels along a frozen isentrope.
This is due to heat release from recombination reactions taking place during the
expansion process. Chemical non-equilibrium effects will be most evident in mixtures
with inherently slow chemical time scales, like the low pressure heavily, diluted
mixture being considered here. The equilibrium and frozen theory lines in Figure 5.9
are computed using Equation 1.13 and indicate the expected pressure for the extreme
cases of infinitely fast and infinitely slow reactions, respectively. Due to the slow
reaction time scales, the equilibrium pressure is not obtained in the time shown for the
present results. It is however apparent that the equilibrium value should be attained as
the more time elapses and the expansion continues to widen.
It is also of interest to consider whether the highly unstable, stoichiometric H2-
O2 mixture with no dilution exhibits the same agreement in impulse with 1-D
simulations. The laboratory frame simulations in this case are initialized slightly
differently than was done previously. In this case the 1-D ZND solution is used as a
starting point for axisymmetric simulations rather than 2-D simulations. As before, it
is necessary to shift all axial velocity terms out of the shock-fixed frame. The
transverse structure is rapidly initiated by applying a sinusoidal perturbation to the
temperature in the reaction zone. Irregular structures similar to that observed in the
quasi-shock-fixed simulations for the 2-D geometry are realized within 15 μs. The
simulation domain has a radius of 1 cm and a length of 20 cm. The same grid
resolution that was used in the quasi-shock-fixed case is also used here. The pressure
history for this highly unstable mixture is shown in Figure 5.10.
As before, the computed impulse for the 1-D and axisymmetric cases are
nearly identical. This is an encouraging result since the highly unstable propagation

113
mode is what actually occurs in PDEs under practical operating conditions. For this
case it again appears that 1-D simulations give accurate impulse results. In this case
there is again evidence of chemical non-equilibrium due to the initial slope in the
pressure profile. Due to the lack of argon dilution, the chemical reactions rates are
much faster than for the weakly unstable case. Consequently, the theoretical
equilibrium pressure is reached only 55 μs after the simulation is started.
5.7 Conclusions In this chapter the utility of the multidimensional model developed in Chapter
2 for simulating both regular and highly-irregular detonation structures has been
demonstrated. It is further shown that the wall-averaged stagnation pressure from the
multidimensional simulations is in excellent agreement with 1-D model predictions.
This result further justifies the use of simpler and more computationally efficient 1-D
Figure 5.10 Comparison of 1-D versus axisymmetric (spatially-averaged) head wall pressure. The mixture is stoichiometric H2-O2 at P1=6.67 kPa and T1=298 K.
0 10 20 30 40 50 60 70 80 90
0.38
0.40
0.42
0.44
0.46
Hea
d P
ress
ure
(atm
)
Time (μs)
1-D Simulation Axisymmetric Simulation
equilibrium theory
frozen theory

114
models for the purpose of Isp prediction. Furthermore, it is now clear that the
discrepancy between observed and calculated plateau pressure in Chapter 4 is not due
to the use of a Q1-D model. In the next chapter it will be shown that non-ideal, wall
losses such as heat transfer, friction and condensation are the primary mechanisms
responsible for the observed discrepancies.

115
Chapter 6: The Influence of Wall Heat Transfer, Friction and Condensation
6.1 Introduction The use of detonation waves in propulsion systems, such at the Pulse
Detonation Engine (PDE), has been investigated by many authors in recent years. The
reader is referred to Kailasanath (2001, 2003) and Wu et al. (2003) for a detailed
summary of recent efforts. In these works, experimental measurements of detonation
tube specific impulse (Isp) have varied by as much as 20% from one facility to the next
[Laviolette et al. (2002)] and were in some cases 30% lower than theoretical estimates
[Owens and Hanson (2007)]. To reconcile these differences, experiments by Zitoun et
al. (1997) and Laviolette et al. (2002) showed that increasing the length-to-diameter
(L/D) ratio of the detonation tube lead to significant performance decrement. The
observed trend was attributed to heat transfer and frictional losses in the qualitative
analysis presented in Laviolette’s work. More recently, Radulescu and Hanson (2005)
quantitatively assessed the impact of convective wall heat losses in the absence of
friction using a one-dimensional (1-D) model based on the method of characteristics.
Although Radulescu’s work demonstrates good agreement with head pressure
measurements in facilities with diameters larger than 5 cm and L/D ratios less than 50,
it is not sufficient to explain the pressure measurements presented in this work for tube
diameters as small as 8 mm and L/D ratios as high as 200. Additionally, comparison
between stoichiometric, C2H4-O2 measurements from Cooper et al. (2002) and those

116
made by Owens and Hanson (2007) in a separate facility reveal that the head pressures
behind the Taylor wave (P3 or plateau pressure) are offset from one another by 10%
almost immediately after ignition. This early-time pressure offset is not captured in
Radulescu’s model which predicts pressure histories that start at the theoretical P3 and
deviate linearly from the isentropic solution as the Taylor wave widens. The objective
of the current chapter is to reconcile these differences by constructing a model that
considers wall losses, including convective and conductive heat transfer, friction and
condensation of water vapor in the combustion products. This work represents the
first effort to quantitatively account for wall heat conduction and shear stress on
detonation tube impulse. It is also the first work to consider the impact of water vapor
condensation, an effect that can be quite significant as will be demonstrated.
Several models have been reported in the literature for estimating wall losses
behind detonation waves. Some of the earliest work was performed by Sichel and
David (1966) who augmented Mirels’ (1955) turbulent shock tube boundary layer
work in order to predict the heat flux behind a plane detonation wave traversing a flat
plate. Since the resulting model does not consider the Taylor wave it significantly
overestimates experimental heat transfer measurements [Du et al. (1982)]. In work
performed at the University of Toronto by Du et. al (1982) the unsteady, laminar
boundary layer behind blast and detonation waves is considered. Similar to Sichel’s
work, this model also builds on the ideas originally proposed by Mirels. The resulting
model, which will be referred to as the Toronto Model, considers the Taylor wave
profile and does not rely on any empiricism.
In work by Skinner (1967), Edwards et al. (1970), and Radulescu (2005) the
losses behind the detonation wave are treated using a Reynolds analogy approach with
a constant friction coefficient (Cf). This approach has never been directly validated by
using simultaneous comparisons with heat flux and shear stress data. One of the
objectives of this work will be to validate this 1-D, Reynolds analogy strategy via
comparison with results from an axisymmetric Navier-Stokes simulation. Another
objective is to use this computationally efficient 1-D approach to quantitatively assess
performance losses due to both heat transfer and friction for the first time.

117
Additionally, a new modeling strategy is proposed that accounts for both convective
and conductive heat losses by combining the Reynolds analogy approach with the
Toronto Model.
The outline of the present chapter is as follows. First, a low pressure (P1=6.67
kPa) case study will be considered that is amenable to simulation using the
axisymmetric, Navier-Stokes Model from Chapter 2. This low pressure case was
chosen since the detonation structure is well known from Chapter 5 and because the
Reynolds number is sufficiently low that the near wall grid spacing required to resolve
boundary layer phenomena does not result in a prohibitively small time step as
prescribed by the CFL stability criteria (Equation 2.68). The results from the Navier-
Stokes Model will be used to validate several different 1-D heat loss and shear stress
formulations. It should be emphasized that accurate 1-D models are the focus of this
work because multidimensional models capable of resolving wall losses in unsteady
detonation tubes are computationally prohibitive for parametric analysis at practical
operating conditions.
Next, the model problem will be considered again except at high pressure (P1 =
1 atm). Experimental heat flux data will be used to calibrate the 1-D models for this
high pressure problem which is typical of laboratory experiments. It will also be
shown that the relative impact of heat transfer and friction on the detonation tube
impulse is diminished as the operating pressure is increased. Additionally, results
from the 1-D loss models will be compared to head pressure measurements collected
in a 6.35 cm diameter, L/D=33 detonation tube [Kiyanda et al. (2002)]. For this large
diameter facility relatively good agreement between model and measurement is
achieved by only considering the effects of heat transfer and friction. However, a
rigorous test of wall loss phenomena requires the use of tubes with much smaller
diameters and larger L/D ratios.
In the last section of the paper, pressure measurements are made in 8, 16 and
32 mm diameter detonation tubes with corresponding L/D ratios of 50, 100 and 200,
respectively. For these extreme conditions it is shown the effects of wall heat transfer
and friction alone are not sufficient to account for the observed pressure losses. By

118
performing a second set of experiments in which the tube walls are heated to 376 K, to
mitigate condensation effects, it is shown that the Isp can be increased by as much as
66% compared to the cold wall (293 K) experiment in the 8 mm tube. An
approximate, 1-D condensation model is developed which reproduces some qualitative
features of the experimental data, including the rapid pressure decay observed at early
times. Before considering condensation effects the role of wall heat transfer and
friction alone will first be addressed.
6.2 Wall Heat Transfer & Friction Models Several different models will be considered to assess the influence of wall heat
transfer and friction on the performance of a detonation tube. These models can be
broadly categorized as either Axisymmetric or 1-D models. The Axisymmetric
models include the Navier-Stokes Model from Chapter 2 and the Toronto Model. In
both of these models the wall heat flux and shear stress are computed directly by
evaluating the near-wall transport properties along with the temperature and velocity
derivatives, respectively.
The 1-D models include the ΔT, Δh, and Hybrid Models. In the 1-D models
the flowfield response to wall heat flux and shear stress is evaluated through the use of
source terms in the 1-D, reacting, Euler equations (Equation 2.10). These source
terms can be defined in a number of ways which will be the focus of this section. The
convective heat loss and shear stress source terms are evaluated using an appropriately
defined Stanton number (St) and Friction Coefficient (Cf). The 1-D models also
invoke Reynolds analogy so that St can be deduced from Cf, making Cf the only
independent input parameter. In the ΔT Model the heat flux is proportional to a
temperature difference, whereas in the Δh Model it is proportional to an enthalpy
difference, hence the naming convention. The Hybrid Model is named appropriately
since it is a combination of the Δh and Toronto Models. Whereas both of the
axisymmetric models account for heat conduction, the Hybrid Model is the only 1-D
formulation that includes conductive heat loss. Aside from the Navier-Stokes Model,

119
which was described thoroughly in Chapter 2, all other models are discussed in greater
detail below.
6.2.1 Toronto Model
Throughout this work the model developed by Du et al. (1982) to predict the
laminar boundary layer development behind blast and detonation waves will be
referred to as the Toronto Model. The model solves the unsteady, laminar boundary
layer equations behind the detonation front and uses the analytic, inviscid, self-similar
profile first recognized by Taylor (1950) as the freestream boundary condition (see
Chapter 1). Both planar flow and axisymmetric flow can be treated. By defining
appropriate transformed coordinates Du et al. demonstrate the governing partial
differential equations can be reduced to a pair of ordinary differential equations. The
resulting equation set has been solved in this work by implementing the iterative
numerical method suggested in the same reference [Du et al. (1982)].
Several simplifying assumptions are used in the Toronto Model. For instance,
the model assumes that the unburned and burned gases can be represented by distinct,
yet constant, specific heats and that the dynamic viscosity of the gas has a power-law
temperature dependence. Since the Taylor wave is used as the freestream boundary
condition, the Toronto Model is only strictly applicable while the detonation resides in
the tube and not throughout blowdown. Additionally, the model does not account for
the influence of wall losses on the freestream flowfield properties. Consequently, it
cannot be used directly to evaluate impulse decrement due to heat transfer and friction.
Despite these simplifying assumptions, it will be shown that the Toronto Model does
an excellent job of reproducing the wall heat flux and shear stress profiles predicted by
the Navier-Stokes Model for low Reynolds numbers.
Inputs to the Toronto Model include standard Chapman-Jouguet properties that
can be computed with aid of STANJAN [Reynolds (1986)] or CEA [Gordan and
McBride (1994)]. Appropriate transport properties were identified by probing the
Navier-Stokes Model results at various locations behind the detonation wave and
within the boundary layer. The Prandtl number (Pr) was found to be approximately

120
constant across the tube radius and values of 0.67 and 0.58 were used for products in
stoichiometric C2H4-O2 and H2-O2 mixtures, respectively. The dynamic-viscosity is
defined via Equation 6.1.
ω
μμ ⎟⎟⎠
⎞⎜⎜⎝
⎛=
rr T
T (6.1)
For stoichiometric C2H4-O2 products μr = 1.3365E-5 Pa.s and ω = 0.84. Similarly, for
stoichiometric H2-O2 products μr = 1.0815e-5 Pa.s and ω = 0.97. Here μr is a reference
viscosity defined for the burned gas at Tr = 298 K and ω is the viscous exponent.
6.2.2 ΔT and Δh Models For both the ΔT and Δh Models the wall losses will be evaluated using
Reynolds analogy between heat transfer and friction. Reynolds analogy is strictly
valid in a zero pressure-gradient flowfield in which Pr = 1. Nevertheless, it has been
shown to be a good approximation in a number of laminar and turbulent flows that do
not adhere exactly to this set of criteria [White (1991)]. In both models the wall shear
stress will be approximated via Equation 6.2.
eeefw uuC ρτ21
= (6.2)
Here τw is the wall shear stress, Cf is the friction coefficient, ρe is the freestream
density, and ue is the freestream velocity. In both the ΔT and Δh Models, Cf will be
taken as a constant behind the denotation wave. This approximation is not entirely
arbitrary since in turbulent flows Cf approaches a constant value at high Reynolds
numbers. The two formulations differ in their definitions of St and how it is used to
compute wall heat flux. In the ΔT Model, the Stanton number, adiabatic wall
temperature, and wall heat flux are given by equations 6.3-6.5.
2fC
St = (6.3)

121
)2
11( 2e
eeaw MTT −
+=γ (6.4)
)(,''
wawepeew TTCuStq −= ρ& (6.5) The heat flux formulation in ΔT Model was originally proposed for use in
evaluating detonation tube impulse by Radulescu and Hanson (2005). As evident
from Equation 6.4, Taw is defined assuming a recovery factor of one. The subscript w
in this chapter denotes a quantity evaluated at the wall. In the current implementation,
γ is defined as the ratio of specific heats and is evaluated locally based on the
freestream temperature and chemical composition. The mixture specific heat at
constant pressure (Cp) and the local sound speed used to define Me are evaluated
similarly.
The second formulation will be referred to as the Δh Model and is described by
equations 6.6-6.8 below:
32Pr
2−= fC
St (6.6)
231Pr21
eeaw uhh += (6.7)
( )eqwaweew hhuStq ,'' −= ρ& (6.8)
The Δh Model was first used in Owens et al. (2005) and Mattison et al. (2005) to
successfully reproduce velocity, temperature and XOH measurements. The present
work represents the first rigorous test of the utility of the Δh Model for performance
predictions.
In the Δh formulation a correction for Pr ≠ 1 is incorporated into the relation
between Cf and St as given in Equation 6.6. Additionally, the adiabatic wall enthalpy
(haw) is evaluated assuming the recovery factor is given by Pr1/3, a common
assumption for turbulent flows. For laminar flows the recovery factor is often
approximated as Pr1/2 [Groth et al. (1991)]. In this work only the turbulent flow
approximation will be used. The equilibrium wall enthalpy (hw,eq) which appears in
Equation 6.8 is defined using the equilibrium chemical composition at Tw and Pe. In
practice this amounts to evaluating the enthalpy of the major combustion products (i.e.

122
H2O and CO2 for hydrocarbon combustion) at Tw. Consequently, hw,eq takes on a
constant value provided Tw is constant. The heat flux formulation proposed in
Equation 6.8 removes the ambiguity of defining an appropriate Cp as is required in the
ΔT Model. Also, by defining the heat flux in terms of an enthalpy difference, rather a
temperature difference, allows the additional heat release near the wall due to
chemical recombination to be factored into the model via the heat of formation term in
the enthalpy.
The shear stress and wall heat flux defined in each of the two formulations are
incorporated as sink terms in the source vector O on the right-hand-side of the axial
momentum and energy equations (Equation 2.10), respectively, via equations 6.9 and
6.10.
DVA
F wwww
ττ 4''' −=−= (6.9)
Dq
VAq
Q wwww
''''''' 4 &&
−=−= (6.10)
In Radulescu’s work it is shown that deviations, due to heat loss, from the ideal
solution of the 1-D conservation equations are only a function of the non-dimensional
parameter βCf, where β=L/D. The implementation in this work differs somewhat from
Radulescu, due to the inclusion of realistic chemistry and temperature dependent
thermodynamic data. Additionally, the present implementation also considers the
effects of wall shear stress. Nevertheless, it has been verified numerically that the ΔT
and Δh Models give Isp predictions and head pressure profiles within 1% of one
another even when the tube lengths differ by a factor of 20 provided βCf is held
constant. As a result, these two 1-D models can be implemented with significant
computational savings on a shorter computational domain provided the desired βCf is
maintained.

123
6.2.3 Hybrid Model The Hybrid Model combines the Δh and Toronto Models described previously.
More specifically, the Δh Model is used throughout the Taylor wave to predict the
convective heat loss and shear stress, and the Toronto Model is used to estimate the
conductive heat loss in the plateau region. In order to ensure a non-discontinuous
transition when switching between the models, the Toronto Model is only activated
once the Δh predicted heat flux drops below the heat flux predicted at the start of the
plateau region in the Toronto Model. Similarly, during blowdown the Toronto Model
is only invoked if the Δh Model convective heat loss drops below the conductive term
from the Toronto Model.
As stated previously, the Toronto Model is only strictly valid up until the point
the detonation wave exits the tube. Thus, it would be inappropriate to continue using
the Toronto Model conductive term throughout the entire blowdown. In the present
implementation the Hybrid Model reverts entirely to the Δh Model for the remainder
of the blowdown after the first strong expansion wave reaches the end wall. The
arrival of this strong expansion wave is indicated by the gas velocity at a point X = x/L
= .03 exceeding 3% of the exit velocity. This event will be referred to as the transition
point. At the transition point the velocity in the tube is everywhere too high to justify
the use of a conductive heat loss model.
Since the Toronto Model accounts for both convective and conductive heat
loss it may be unclear why it is necessary to combine it with the Δh Model. The
reason is that the Δh Model can be calibrated for either laminar or turbulent flows,
whereas the Toronto Model is only strictly valid for laminar flows. By using the Δh
Model to evaluate the convective losses and the Toronto Model only to evaluate
conductive losses, the Hybrid Model can be applied to either flow regime.
The solution of the governing differential equations in the Toronto Model is
non-trivial, and thus it is undesirable to have to solve these equations during each time
step in 1-D model in order to evaluate the source terms. To circumvent this problem
the wall heat flux and shear stress predicted by Toronto Model have been reduced to
simple curve fits dependent on the non-dimensional distance behind the wave front

124
and the elapsed time (tl) since the wave front has past the point of interest. The wall
heat flux throughout the Taylor wave can be predicted using Equations 6.11-6.15
along with the curve fit parameters in Table 6.1:
CJxx
−= 1ξ (6.11)
CJ
CJ
CJl V
xV
xtξ
ξξ
=−
=)1(
(6.12)
01
221 aaaB ++= ξξ (6.13)
112
2 μρCJVB = (6.14)
lw t
BBq 21'' −=& (6.15)
Similarly, the wall shear stress can be evaluated using Equation 6.16 along
with the values given in Table 6.1. The curve fit parameters in Table 6.1 are valid for
combustion products of stoichiometric H2-O2 and C2H4-O2 detonations. Values are
given for all of the conditions considered in this work. The last row in Table 6.1
shows the range of validity of the curve fit, which starts just behind the detonation
front (ξ = 0) and extends to the start of the stagnant region (ξ* ≈ 0.5). In the Hybrid
Model only the stagnant gas region heat flux is used, and this is evaluated at ξ = ξ*,
where ξ* is given by the maximum value of ξ in the specified range. Consequently, it
is assumed that the heat flux is spatially (not temporally) constant in the conduction
region. Another reasonable choice, although not used in this work, would be to revert
to the Toronto Model predicted heat flux whenever the Δh Model drops below the
Toronto value at any given ξ.
03
32
21
1 expexpexp bbbbxCJw +⎟⎟⎠
⎞⎜⎜⎝
⎛ −+⎟⎟
⎠
⎞⎜⎜⎝
⎛ −+⎟⎟
⎠
⎞⎜⎜⎝
⎛ −=
αξ
αξ
αξτ (6.16)

125
C2H4-O2 C2H4-O2 H2-O2 H2-O2 P1 (kPa) 101 101 101 6.67
T1=Tw (K) 298 376 298 298 B2 (W.s1/2/m2) 2.325e4 2.299e4 1.861e4 4.288e3
a2 5.051 4.587 5.734 5.742 a1 -8.041 -7.318 -9.354 -9.420 a0 5.629 5.158 6.802 7.025
b0 (Pa.m1/2) 2376.7 2121.6 1798.1 400.2 b1 (Pa.m1/2) 4260.2 3798.9 3221.4 716.2 b2 (Pa.m1/2) 11093.2 9887.4 8380.3 1863.9 b3 (Pa.m1/2) -50.1 -45.8 -33.4 -8.5
α1 0.15302 0.15282 0.15232 0.15288 α2 0.01841 0.01838 0.01832 0.01836 α3 0.00264 0.00264 0.00264 0.00264
Range 0.002≤ξ≤0.492 0.002≤ξ≤0.490 0.002≤ξ≤0.486 0.002≤ξ≤0.486
Table 6.1 Curve fit parameters used to approximate wall heat flux and shear stress from Toronto Model.
While the wall losses in the ΔT and Δh Models are only functions of the non-
dimensional parameter βCf, the same does not hold true for the Hybrid Model. Since
the heat conduction term in Hybrid Model decays as 1/tl1/2, and tl is proportional to xCJ,
there is now an extra length scale which breaks simple βCf dependence. Only when
the conductive heat loss is negligible compared to the convective heat loss will the
results appear to be only a function of βCf. This has an important consequence on the
modeling strategy. With the ΔT and Δh Models a reduced computational domain can
be used to simulate a given experiment provided βCf is maintained; however, with the
Hybrid Model the actual geometry needs to be simulated. Consequently, depending
on the geometry of interest, the Hybrid Model can be significantly more expensive
than the other 1-D models.
6.3 Model Validation & Case Study There are three primary objectives in this section. First, the validity and
limitations of the ΔT, Δh and Hybrid Models will be tested by comparing them to
results from the Navier-Stokes Model for a low pressure (P1=6.67 kPa) detonation

126
wave. At the chosen condition the Navier-Stokes Model can be used to resolve
boundary layer phenomena and directly evaluate the resulting heat transfer and shear
stress. These results can then be used as a validation target. The second objective is
to use measured heat flux data to recalibrate the 1-D models for use at high pressure
(P1=1 atm). The final objective is to observe how wall heat loss and friction affect
performance and the relative importance of these losses as P1 increases.
In order to achieve these objectives a low and high pressure case study will be
conducted. In both instances the detonation tube is 20 cm long and 2 cm in diameter.
Additionally, both the low pressure (6.67 kPa) and the high pressure (1 atm) cases
consider a mixture of stoichiometric, H2-O2 at 298 K. The GRI 3.0 mechanism is used
to describe the chemical kinetics [Smith et al. (2000)]. One end of the tube is closed
and a reflective boundary condition is imposed. The opposite end of the tube is open
and characteristic-based outflow boundary conditions are used [Baum et al. (1994)].
Additional details regarding the numerical setup for each case will be discussed below.
6.3.1 Numerical Setup – Low Pressure Case
First the setup for the axisymmetric Navier-Stokes Model will be described. A
symmetry boundary condition is imposed at the tube center so that the simulated
domain is actually 20 cm by 1 cm. A no-slip, isothermal (Tw=298 K), non-catalytic
boundary condition is imposed at the wall surface. Additionally, the wall-normal
pressure derivative is taken to be zero. While the detonation is propagating within the
tube the axial grid spacing is uniform and equal to 50 μm, which corresponds to 20
points in the ZND reaction zone. After the detonation wave has exited the tube, the
axial grid spacing remains uniform but is coarsened by a factor of five.
Compound grid-stretching (see Chapter 2) is used across the radius of the tube.
Starting at the wall the grid is non-uniformly stretched for a specified number of grid
points before a smooth transition to an evenly spaced mesh used for the remainder of
the domain. Throughout the entire simulation the near-wall grid point is fixed 10 μm
from the surface. While the detonation is in the tube, 20 grid points are used in the
non-uniform, near-wall region, and the remaining 120 points are evenly spaced

127
(Δyuniform=76.5 μm). After the detonation has exited the tube, 30 points are stretched
across the near wall region while another 30 points are used in the uniform region
(Δyuniform=246.8 μm). Although fewer total transverse grid points are used during
blowdown, the near wall grid spacing remains relatively unchanged.
The primary objective in studying this low pressure model problem is to
capture accurate wall heat flux and shear stress profiles so that they can be used to
validate the formulation of the 1-D wall loss models. For this reason it is important to
ensure the computed profiles are independent of the near wall grid spacing. In Figure
6.1 the wall heat flux and shear stress are compared for a fine and coarse grid in which
the near-wall point is located 10 μm and 25 μm from the surface, respectively.
Although the same number of total grid points are used across the transverse
dimension for both the fine and coarse grids, the fine grid has a higher concentration
of points near the wall surface. As evident the coarse grid does an excellent job of
capturing the post-shock peaks in both profiles. There are some differences in the
exact shape of the heat flux profiles due to slightly different transverse wave structure
evolution between the two cases. For present purposes it is most important that the
Figure 6.1 Comparison of wall heat flux and shear stress profiles for fine and coarse near-wall grid resolution.
25 50 75 100
0
5
10
15
20
25
30
35
Wal
l Hea
t Flu
x (M
W/m
2 )
X (mm)25 50 75 100
0
1
2
3
4
5
6
Δrwall= 10 μm (fine) Δrwall= 25 μm (coarse)
Wal
l She
ar S
tress
(kP
a)
X (mm)

128
integrated areas be in close agreement, as this will be a target for the calibration of the
1-D models. In this case, the integrated areas under the profiles are in agreement
within 7% and 3% for the heat flux and shear stress, respectively. This result provides
confidence that the 10 μm near-wall spacing used in the results to follow is sufficient
to give an accurate estimate of the wall losses.
The simulation is initialized by shifting the ZND solution out of the shock-
fixed frame and placing it onto the axisymmetric grid in the 2 cm region adjacent to
the end wall. For this low pressure case the ZND solution needs to be used as the
initial condition in order to reliably generate a self-sustaining detonation wave.
Efforts to use a high temperature and pressure spark region, as is commonly done in
higher P1 mixtures were unsuccessful. Since this initial condition imposes a large
axial flow velocity in the near wall region, there exists a large startup transient as the
flow responds to the no-slip condition. In order to minimize the errors associated with
this startup event the initial CFL number is set to 0.05 and then gradually increased to
0.8. The development of the transverse detonation structure is accelerated by applying
a sinusoidal temperature perturbation across the reaction zone.
For the 1-D models an axial grid spacing of 100 μm is used which corresponds
to 10 points per ZND reaction length. While this grid spacing is coarser than used in
the Navier-Stokes simulations it is sufficient to resolve the C-J wave speed and burned
gas state. The detonation wave is initiated in the 1-D models in the same way as for
the Navier-Stokes Model by using the ZND solution in the first 2 cm of the
computational domain.
As will become evident in the discussion to follow the low pressure model
problem will prove to be a particularly challenging case since the relative importance
of wall heat transfer and friction is amplified at low pressure. In fact the wall losses
are so appreciable that the Navier-Stokes simulation reveals the detonation wave starts
to fail 5 cm from the tube exit. The failure of the wave near the exit of the tube is
evident in the wave speed which remains within 1% of VCJ over that first 15 cm of the
tube, but deviates from VCJ by 18% as the wave is exiting the tube. Nevertheless, it

129
will be shown that the best of the 1-D models can still be used to predict the
detonation failure and resulting performance for this challenging case.
6.3.2 Cf Calibration – Low Pressure Case
In Figures 6.2 and 6.3 the wall heat flux and shear stress profiles are plotted for
each of the models when the detonation front has reached x=14 cm. This particular
location was chosen because it occurs before detonation failure and at this point the
flowfields in each of the models are nearly identical. This allows a more direct
comparison of the models since the input parameters for the loss terms are the same.
Before considering the 1-D models it is of interest to first compare the Navier-
Stokes and Toronto Models. As evident, the results from the Navier-Stokes
simulation are quite accurately predicted using the Toronto Model, including the
conduction in the stagnant gas region at the end of the Taylor wave. The oscillations
in the Navier-Stokes simulation are due to transverse detonation structure, which is
neglected in the Toronto Model, but does not appear to significantly affect its ability to
accurately represent the wall losses. It is not especially surprising that the laminar
Toronto Model works so well for this low pressure case since the tube Reynolds
number is quite low (ReD|CJ=15,000). Errors incurred due to any subgrid-scale
turbulence are expected to be minimized at this Reynolds number.
The next objective is to test the validity of using a constant Cf in the 1-D
models. To do this the Navier-Stokes shear stress data in Figure 6.3 is used to
calibrate an appropriate Cf for the Δh, ΔT and Hybrid Models. The two former models
are shown as a single curve since their shear stress profiles are coincident. A
reasonably good fit is obtained for all shear stress profiles using Cf=0.011. Since the
wall shear stress source term is the same in all the 1-D models the only difference
between these curves is due to differences in the flowfield evolution by the time the
detonation has reached x=14 cm.
Next, the chosen value of Cf is used to evaluate the Stanton number and
corresponding heat flux for the ΔT, Δh and Hybrid Models. As evident from Figure
6.2, the Δh Model does a much better job of reproducing the Navier-Stokes profile

130
than does the ΔT Model which significantly under-predicts the heat flux. There are
two primary reasons the Δh Model predicts a larger heat flux. The first reason is that
the enthalpy difference in Equation 6.8 is generally larger than the corresponding
Cp,e(Taw-Tw) term in Equation 6.5. This is due to the inclusion of chemical
recombination effects in the Δh term which includes the enthalpy of formation for
each chemical species and assumes major products are formed near the cool wall
boundary. Secondly, the equation used to relate St to Cf in the Δh Model includes a
Prandtl number dependence that makes it necessarily higher than the ΔT Stanton
number whenever the Prandtl number is less than unity. Since the ΔT Model does not
accurately represent the heat flux it will not be considered further in this low pressure
case study.
Another point in regard to Figure 6.2 is that since the Δh Model only accounts
for convective heat loss, the conductive heat flux in the stagnant gas region is
neglected. Consequently, the integrated heat loss from the Δh Model is appreciably
lower than that predicted in the Navier-Stokes simulation. As evident, by using the
Hybrid Model the convective and conductive heat losses are both well approximated.
Thus, it is expected that the Hybrid Model should give the best agreement with the
Navier-Stokes Model in the results to follow.
Figure 6.2 Simulated wall heat flux for low pressure case study.
Figure 6.3 Simulated wall shear stress for low pressure case study.
0 2 4 6 8 10 12 140
5
10
15
20
25
30
35
40
Wal
l Hea
t Flu
x (M
W/m
2 )
X (cm)
Navier-Stokes Model Toronto Model Δh Model (Cf=.011) ΔT Model (Cf=.011) Hybrid Model (Cf=.011)
6 7 8 9 10 11 12 13 14 150
1
2
3
4
5
Wal
l She
ar S
tress
(kP
a)
X (cm)
Navier-Stokes Model Toronto Model Δh / ΔT Models (Cf=.011) Hybrid Model (Cf=.011)

131
6.3.3 Results – Low Pressure Case In the previous section the Navier-Stokes predicted heat flux and shear stress
profiles corresponding to the detonation wave at a single location in the tube were
used to calibrate an appropriate Cf. The calibration procedure also revealed that the
use of a constant Cf and Reynolds analogy can yield accurate wall heat transfer and
shear stress predictions when the Δh and Hybrid Models are used. The objective of
the present section is to verify how well these two models perform throughout an
entire cycle, and most importantly how well they predict performance.
In Figures 6.4 and 6.5 the wall heat flux and shear stress are plotted versus
time at five different locations within the tube. Here the variable X = x/L corresponds
to the fractional distance from the end wall, with X = 0 corresponding to the end wall
and X = 1 corresponding to the exit. Successive heat flux traces for each value of X
have been shifted up by 5 MW/m2 and to the right by 50 μs for visual clarity.
Similarly, successive shear stress profiles have been shifted up by 0.5 kPa and to the
right by 50 μs. Before discussing the validity of the Δh and Hybrid Models, some
general features of the Navier-Stokes predicted profiles will be addressed first.
The initial rise in each of the traces corresponds to the arrival of the detonation
wave at the measurement location. The magnitude of this spike in the Navier-Stokes
Figure 6.4 Simulated, full-cycle wall heat flux for low pressure case study.
Figure 6.5 Simulated, full-cycle wall shear stress for low pressure case study.
0 200 400 600 800
0
5
10
15
20
25
30
35 Navier-Stokes Model Δh Model (Cf=.011) Hybrid Model (Cf=.011)
X=0.2
X=0.4
X=0.6
X=0.8
Wal
l Hea
t Flu
x (M
W/m
2 )
Time (μs)
X=1.0
0 200 400 600 800
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0 Navier-Stokes Model Δh / Hybrid Models (Cf=.011)
X=0.2
X=0.4
X=0.6
X=0.8
X=1.0
Wal
l She
ar S
tress
(kP
a)
Time (μs)

132
Model varies depending on the traverse detonation structure near the wall. For
instance, high local heat fluxes occur after transverse wave collisions with the wall.
Similarly, higher than average wall heat fluxes and shear stresses also tend to occur
during the formation of a new Mach stem after a triple-point collision with the wall
surface. Even the Δh and Hybrid Models show some variability in the peak values
due to the pulsating nature of the 1-D wave front [Yungster (2004)]. After the initial
spike, both the heat flux and the shear stress profiles decay as the Taylor wave
traverses the measurement location. Since the width of the Taylor wave increases as
the detonation wave moves further from its point of initiation, the rate of decay
decreases as X increases. This is particularly evident in the shear stress profiles via
the increasing width of the triangular features in the traces nearer the tube exit.
The general shape of the heat flux and shear stress profiles predicted by the
Navier-Stokes Model are qualitatively similar until the tail of the Taylor wave has
passed the measurement location. Since the end of Taylor wave marks the start of the
stagnant gas region, the shear stress relaxes to zero at this point. The only exception
being the shear stress profile at the tube exit (X = 1) where the gas does not stagnate
until much later in the blowdown process. Unlike the shear stress profiles, the heat
flux profile does not relax to zero at the tail of the Taylor wave. This is due to
conduction from the stagnant burned gasses into the cold tube walls.
From the shear stress profiles at locations away from the tube exit it is apparent
that the majority of the shear is applied at early times during the passage of the
detonation and the trailing Taylor wave. Contributions during the rest of the
blowdown appear to be negligible. Conversely, at the tube exit (X=1) where the flow
velocity remains high throughout most of the cycle, the shear force continues to be
appreciable for longer times. A somewhat different trend is observed in the heat flux
profiles. For the profiles near the closed end of the tube the heat flux remains
appreciable long after the passage of the detonation due to the continuing influence of
conduction. At the tube exit the convective heat losses relax to a nearly constant,
relatively small level soon after the passage of the detonation. The convective losses

133
near the exit are smaller than the conductive losses near the head only because the
freestream temperature drops significantly due to gas dynamic expansion.
Referring to Figure 6.4 it is evident that both the Δh and Hybrid Models do a
good job of capturing the heat flux for larger values of X, near the tube exit where the
effects of convective heat loss are dominant. However, for smaller values of X, where
the effects of conduction become important, only the Hybrid Model yields good
agreement with the Navier-Stokes Model. The discontinuous drop in the Hybrid
predicted heat flux occurs at the transition point when the conduction term is turned
off, signaling the arrival of first strong expansion wave at the head wall.
In Figure 6.5 the Δh and Hybrid Model predicted shear stress profiles are
indistinguishable and consequently plotted as a single line. In general, the 1-D models
do a good job of capturing the Navier-Stokes predictions. However, very close
examination reveals that the shear stress is under-predicted to some extent in the 1-D
models, possibly due to the omission of transverse wave effects. This is probably
most evident in Figure 6.3. Nevertheless, as will be shown next, this small under-
prediction does not prevent accurate performance predictions.
In addition to determining how well the 1-D models perform throughout a
cycle, it is also of primary importance to observe what effect wall losses have on
impulse and whether the 1-D models can be used to accurately predict these effects.
In Figure 6.6 head pressure is plotted versus time for the Navier-Stokes, Δh, and
Hybrid Models. There are also two additional results labeled Axisymmetric Ideal and
1-D Ideal, which correspond to the solution of axisymmetric and 1-D Euler equations,
respectively. There is no wall heat loss or friction in the ideal models. The other
elements of the numerical setup, including the grid and initial conditions are identical
for the axisymmetric and 1-D cases.
Before discussing the impulse predictions from each of the models in Figure
6.6 some of the more prominent features of the pressure traces will be highlighted. At
early times the Axisymmetric Ideal, 1-D Ideal and Δh Models all show a small
positive slope in their pressure history. As discussed in the previous chapter, this is
due to non-equilibrium chemistry occurring as a fluid particle passes through the rapid

134
expansion wave generated at the end wall. In general, a particle that expands along a
frozen isentrope will reach a lower final pressure than if it expands along an
equilibrium isentrope [Wintenberger (2004)]. As the detonation propagates down the
tube, the expansion wave widens and merges with the detonation front, forming the
familiar Taylor wave profile. After approximately 100 μs the slope of the expansion
wave is sufficiently mild that equilibrium chemistry is achieved throughout the
expansion. At this point the pressure in the ideal model matches the plateau pressure
predicted by equilibrium theory. This is perhaps most evident in the 1-D ideal
simulation where the oscillations due to transverse detonation structure are absent.
While the same non-equilibrium effect also occurs in the Navier-Stokes and Hybrid
Models it is counteracted by the high heat conduction at early times in the stagnant gas
region where the thermal boundary layer is initially very thin. Consequently, the
pressure in these models does not tend towards the ideal, equilibrium pressure as it did
in the models that did not account for conduction.
Figure 6.6 Simulated head pressure for low pressure case study.
0 100 200 300 400 500 600 700 8000.0
0.1
0.2
0.3
0.4
0.5
Hea
d Pr
essu
re (a
tm)
Time (μs)
Axisymmetric Ideal Model Navier-Stokes Model 1-D Ideal Model Δh Model (Cf=.011) Hybrid Model (Cf=.011)

135
Model Isp,head Isp,friction Isp,total 1-D Ideal 175 0 175 Axi-Ideal 174 0 174 Δh Model 161 -12 149
Hybrid Model 151 -12 139 Navier-Stokes 153 -16 137
Table 6.2 Isp results for low pressure case study.
Another somewhat unusual feature in Figure 6.6 is the two-stage pressure
falloff in all of the non-ideal models. As mentioned previously, when losses are
included, the detonation wave begins to fail near that exit of the tube as indicated by
an 18% decrement in the save speed versus VCJ. As the detonation wave fails an
expansion wave travels back towards the head wall and is responsible for the first
stage of the pressure falloff around 200 μs. The second stage of the falloff is due to
the familiar expansion wave generated at the outflow boundary as the detonation wave
leaves the tube. Since the detonation wave does not fail in either of the ideal models
there is only the familiar single-stage pressure falloff.
Referring again to Figure 6.6, it is immediately clear that the pressure based
impulse from all of the models including wall losses is appreciably lower than
predicted by the ideal models. The total Isp is determined by integrating the forces until
the time at which the head pressure has dropped to the fill pressure, and then dividing
this value by the mixture weight as shown in Equation 6.17 below.
∫ ∫ ∫ ⎥⎦
⎤⎢⎣
⎡−=
cyclet D L
wheadsp dtdxxtrrdrrtPgLr
I0
2/
0 02
1
),(),(2 τρ
(6.17)
Here the first term in the brackets accounts for the pressure-based impulse and
the second term accounts for the impulse loss due to wall shear forces. Here, Phead is
taken as the gauge pressure rather than the absolute pressure. For the 1-D models
Phead can be pulled outside the integral since it is not a function of r. A summary of
the computed Isp is summarized for each of the models in Table 6.2.
The results in Table 6.2 are organized in order of decreasing performance. As
expected the ideal models generate the highest performance and the models which

136
account for friction as well as convective and conductive heat losses have the lowest
performance. Since conductive heat transfer is appreciable in this low pressure
problem the Δh Model is not able to fully replicate the pressure history of the Navier-
Stokes Model. As a result the Δh Model over-predicts the Navier-Stokes Isp by 9%.
Clearly the Hybrid Model does an excellent job of replicating the Navier-Stokes
pressure history and in this case the Isp predicted by the two models differ by less than
2%.
It is quite evident in this low pressure case study that wall losses are
substantial. Comparing the Axisymmetric Ideal Model to the Navier-Stokes Model
reveals an Isp difference of 27%. Within this 27% discrepancy, 15% is due to the
decrement in the head pressure and the remaining 12% is due to wall shear force
impulse loss. In order to gain a further understanding of why the losses are so
substantial in this case it is insightful to compare the forces and energy sources (or
sinks) acting on the detonation tube during the cycle.
In Figure 6.7 two plots are shown; the top plot depicts the forces acting during
a single cycle and the bottom plot reveals the energy sources (or sinks). The total
shear force predicted by the Δh and Hybrid Model are nearly identical and
underestimate the Navier-Stokes results as discussed previously. Nevertheless, the
results for all models clearly indicate the non-negligible influence of shear force
compared to the head wall force. The integrated Navier-Stokes shear forces amount to
10% of the head force, while this figure is 8% for the two 1-D models. For all of the
models approximately 50% or the impulse decrement due to shear force occurs before
the detonation exits the tube at 67 μs. The remainder is attributed to the sustained
shear forces near the tube exit throughout blowdown.
The shape of the wall shear curve initially has a small positive slope. The fact
this slope is not larger is actually a consequence of the ZND initial condition which
imposes a large velocity near the wall over the first 2 cm of the tube. As result of this
initial condition the shear stress starts at a non-zero value. Had it been possible to
directly initiate this mixture the temporal profile would have been triangular; starting
at zero initially and rising to its max value as the detonation reached the tube exit. The

137
positive slope in the shear force profile is a consequence of the widening Taylor wave
as it approaches the tube exit. Consequently, had the tube length been longer the max
shear force would have been larger at the tube exit and the overall shear-based impulse
loss would have also been larger. Since the surface area over which the shear stress
acts is proportional to LD, while the area over which the head pressure acts is
proportional to D2, it is straight-forward to see that the ratio of the shear force to the
head force scales by L/D.
In the bottom plot of Figure 6.7 the rate of energy input due to the combustion
behind the detonation wave is plotted versus the rate of energy removal due to wall
heat transfer. The rate of chemical energy input is estimated using Thompson’s
(1988) 2-γ Chapman-Jouguet detonation model with the heat of reaction extrapolated
to zero temperature as shown in Equations 6.18-6.19.
Figure 6.7 Simulated forces and energy sources (or sinks) for low pressure case.
0 200 400 600 8000
50
100
150
200 Navier-Stokes Model Δh Model (Cf=.011) Hybrid Model (Cf=.011)
Pow
er (k
W)
Time (μs)
Chemical Energy Input
Heat Loss Energy Output
0 200 400 600 800-3
0
3
6
9
12 Navier-Stokes Model Δh Model (Cf=.011) Hybrid Model (Cf=.011)
Forc
e (N
)
Pressure ForceWall Shear

138
⎟⎠⎞
⎜⎝⎛ −
+⎟⎟⎠
⎞⎜⎜⎝
⎛−
−⎟⎠⎞
⎜⎝⎛ −
+⎟⎟⎠
⎞⎜⎜⎝
⎛−
=Δ 21
1
111 2
1112
111 CJ
CJ
CJ
CJCJCJ
o MTRTRh γγ
γγγ
γ (6.18)
o
CJo
chem hrVhmQ Δ=Δ= )( 211 πρ& (6.19)
The rate of energy loss due to wall heat transfer is determined by integrating
wall heat flux over the surface area of the tube at each point in time. As is evident, a
significant amount of the chemical energy release is lost to the tube walls. While the
detonation wave is in the tube the total energy lost to the tube walls in the Navier-
Stokes and Hybrid Models is 22% of chemical energy release. The same figure is
only 15% for the Δh Model since it does not include conduction. If the heat loss is
integrated over the entire cycle then this fraction becomes 55%, 56%, and 37% of the
chemical energy release for the Navier-Stokes, Hybrid and Δh Models, respectively.
For all models the fraction of the total heat loss after the detonation wave exits the
tube is roughly 60%.
The wall heat loss profile has an initially positive slope similar to the wall
shear force profile. As before, this positive slope is a consequence of the widening
Taylor wave as the detonation moves towards the tube exit. The fact that the starting
value of wall energy loss is a significant fraction of the maximum value occurring at
67 μs is primarily a result of the ZND initial condition which imposes large convective
heat losses at early times. If the detonation wave had been directly initiated at the end
wall, then the initial energy loss at t=0 μs would be smaller and entirely due to
conduction. If only convective heat losses are considered, like in the Δh Model, then
the wall heat loss would start at zero for the directly initiated case and rise to a
maximum as the detonation reaches the exit. In general, while the detonation is in the
tube, the wall heat flux acts over an area proportional to LD and the chemical energy is
released at the detonation front in an area proportional to D2. Consequently the ratio
of energy loss to energy input is also proportional to L/D.

139
6.3.4 Numerical Setup – High Pressure Case Since PDEs are unlikely to run at fill pressures as low as 6.67 kPa it is
necessary to be able to assess wall losses at higher fill pressures. In the next few
sections the low pressure case considered above will be reconsidered with P1=1 atm.
At this higher fill pressure the near wall grid spacing required to resolve the wall
losses with the Navier-Stokes Model becomes prohibitively small and consequently it
will be necessary to rely solely on the 1-D models.
The numerical setup for the 1-D models is quite similar to that used for the low
pressure case. The axial grid spacing will be maintained at 100 μm, which for this
high pressure case is significantly larger than the ZND reaction zone. Despite the
decreased grid resolution relative to the reaction zone thickness, it has been verified
that this is sufficient to reproduce the C-J wave speed and the analytical Taylor wave
profile. Additionally, this grid resolution has been used successfully in the past to
reproduce velocity, temperature and XOH measurements in a stoichiometric C2H4-O2
mixture which has an even thinner reaction zone than the H2-O2 mixture considered
here [Owens et al. (2005), Mattison et al. (2005)].
For this high pressure case, the detonation wave can be initiated using a high
temperature (3000 K) and pressure (30 bar) spark region in the first 1 mm of the
computational domain. The spark region is assumed to be stoichiometric H2-O2 at
time zero which subsequently reacts and generates a detonation wave. The pressure is
sufficiently high in this problem that non-equilibrium chemistry effects are absent, and
the equilibrium plateau pressure is realized nearly instantaneously.
6.3.5 Cf Calibration – High Pressure Case
In order to use the 1-D models for this high pressure case, Cf will be
recalibrated using available experimental heat flux data. In Ragland (1967) heat flux
measurements behind a stoichiometric H2-O2 detonation were made using a
platinum/quartz thin film resistance gauge. The initial pressure and temperature of the
mixture considered were 1 atm and 298 K, respectively. Ragland’s data is plotted in
Figure 6.8 along with the Toronto and 1-D models. Although Ragland does not

140
publish the location of the measurement relative to the point of initiation, this was
deduced to be 57 cm from the width of the Taylor wave profile which corresponds to
the first 200 μs of the measurement.
Several previous studies have used Cf = 0.0062 to simulate heat losses [Owens
et. al (2005), Mattison et al. (2005), Radulescu and Hanson (2005)] for P1=1 atm
detonations and thus the same value is attempted here. As evident, the Δh Model
using Cf = 0.0062 does an excellent job of capturing Ragland’s data at early times until
near the end of the Taylor wave where conduction effects become important. The
Hybrid Model largely overcomes this deficiency, and only under-predicts the
integrated heat loss by 15% relative to Ragland’s measurement. Since the integrated
convective heat loss through the Taylor wave is predicted to within 10% using Cf =
0.0062, no further refinement will be attempted here.
As was the case at low pressure, the ΔT Model again significantly under-
predicts the heat flux. In this case the total heat loss in the Taylor wave region is only
Figure 6.8 Comparison of models with Ragland’s (1967) heat flux data for stoichiometric H2-O2 at P1=1 atm, T1=298 K.
0 100 200 300 400 500 600 700 800 9000
10
20
30
40
50
60
70
80
Ragland Data Toronto Model Δh Model (Cf=.0062) ΔT Model (Cf=.0062) Hybrid Model (Cf=.0062)
Wal
l Hea
t Flu
x (M
W/m
2 )
Time (μs)
Xmeas= 0.57 m

141
45% of the experimental value. In general, for both the low pressure and high
pressure cases considered, the Δh Model heat flux tends to be roughly a factor of two
higher than the ΔT Model. Based on these findings it appears that the if the St number
is defined as Cf / (2Pr) rather than St = Cf / 2 then the ΔT Model would be more
consistent with the Δh Model. Since the ΔT Model does not accurately capture the
heat flux it will not be used in the results that follow.
Figure 6.8 also reveals that the Toronto Model tends to under-predict the heat
flux. Since the boundary layer is likely to be turbulent for this high pressure case, the
observed trend is consistent with what would be expected for a laminar model.
Nevertheless, the heat flux near the end of Ragland’s data set, which corresponds to
conduction, appears to approach the Toronto Model. This is an encouraging result
since the Hybrid Model utilizes the conductive heat loss from the Toronto Model.
Although the Toronto Model is not in perfect quantitative agreement with the
heat flux for this high pressure problem, it is clear that it still gives a reasonable
approximation. Since the Toronto Model does not require any type of calibration and
accounts for the transport properties of a particular set of reactants, it is a very
attractive tool for both high and low pressure problems. To complete the high pressure
Cf calibration discussion the wall shear stress predicted by the Toronto Model and the
1-D models is shown in Figure 6.9.
Since experimental data is not available, only a comparison with the Toronto
Model predicted shear stress is possible. Additionally, since Δh and Hybrid Models
give indistinguishable shear stress profiles they are shown as a single curve. As
expected, the integrated wall shear stress from the 1-D models is larger (51%) than
predicted by the laminar Toronto Model over the full duration of the Taylor wave.
Since the 1-D models give the expected trend relative to the laminar model, and since
the Reynolds analogy approach was verified for the low pressure case, there is
increased confidence that the predicted shear stress would be in good agreement with
an experimental measurement if it were available.

142
6.3.6 Results – High Pressure Case In Figures 6.10 and 6.11 the wall heat flux and shear stress profiles are plotted
versus time at various measurement locations along the detonation tube. Since the
general features of these profiles were discussed for the low pressure case, a similar
discussion will not be repeated here. Instead the focus will be on the distinguishing
features between the high pressure profiles shown here and their low pressure
counterparts, Figures 6.4 and 6.5.
One distinguishing feature evident in both Figures 6.10 and 6.11 is the more
prominent second peak in the heat flux and shear profiles later in the blowdown after
the detonation has exited the tube. For example, this peak occurs just before 400 μs in
both plots at the X=0.6 measurement location. This secondary peak corresponds to
the maximum burned gas velocity during the blowdown phase. The reason this
secondary peak was not as pronounced in the low pressure case was because the ZND
Figure 6.9 Comparison of simulated shear stress profiles for stoichiometric H2-O2 at P1=1 atm, T1=298 K.
0 20 40 60 80 100 120 140 160 180 2000.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
Xmeas= 0.57 m
Toronto Model Δh / Hybrid Models (Cf=.0062)
Wal
l She
ar S
tress
(kP
a)
Time (μs)

143
initial condition caused the early time heat flux and shear to be larger relative to the
losses later in the blowdown.
In Figure 6.10 it is also evident that the heat flux profiles for the Hybrid Model
are smoother at the transition point, when the conduction term is deactivated. This
smoother transition is partially due to the relatively larger secondary peak in the heat
flux profile and partially due to the later time at which the transition point occurs. The
transition occurred at an earlier time in the low pressure problem because the first
strong expansion wave to reach the head wall was associated with the detonation
failure which occurred before the exit boundary.
In Figure 6.12 the head pressure from the 1-D ideal, Δh and Hybrid Models is
plotted versus time. Unlike the low pressure case, the non-ideal pressure profiles do
not significantly deviate from the ideal result. The Isp predicted by each of the models
is summarized in Table 6.3. As evident, the Δh and Hybrid Models are within 3% and
5%, respectively, of the total Isp predicted by the ideal model. Thus, it appears for this
high pressure case that non-ideal losses are much more negligible then they were in
the low pressure problem. Of course, if the L/D ratio for this model problem was
higher than 10, this would be true to a lesser extent.
Figure 6.10 Simulated, full-cycle wall heat flux for high pressure case study.
Figure 6.11 Simulated, full-cycle wall shear stress for high pressure case study.
0 200 400 600 800
0
20
40
60
80
100
120 Δh Model (Cf=.0062) Hybrid Model (Cf=.0062)
X=0.8
X=0.6
X=0.4
X=0.2
X=1.0
Wal
l Hea
t Flu
x (M
W/m
2 )
Time (μs)0 200 400 600 800
0
1
2
3
4
5
6
7
8
9
10 Δh Model (Cf=.0062) Hybrid Model (Cf=.0062)
X=0.8
X=0.4
X=0.6
X=0.2
X=1.0
Wal
l She
ar S
tress
(kP
a)
Time (μs)

144
Model Isp,head Isp,friction Isp,total 1-D Ideal 193 0 193 Δh Model 191 -4 187
Hybrid Model 188 -4 184
Table 6.3 Isp results for high pressure case study.
As before, it is again insightful to compare the forces and energy sources (or
sinks) acting throughout the cycle. This information is depicted in Figure 6.13. For
this high pressure problem it was necessary to use a separate y-axis for the wall losses
since they are an order of magnitude smaller than both the wall force and the chemical
energy release. Focusing first on the top half of Figure 6.13 it is evident that both the
Δh and Hybrid Models predict nearly identical shear force profiles. In this case the
shear force starts at zero, as expected for direct initiation, and rises to a maximum at
70 μs as the detonation exits the tube. For this case only 21% of the total shear force
is delivered while the detonation wave is in the tube, as opposed 50% in the low
pressure case. This discrepancy is primarily due to the ZND initial condition used in
Figure 6.12 Simulated head pressure for high pressure case study.
0 200 400 600 8000
1
2
3
4
5
6
7
8
Hea
d P
ress
ure
(atm
)
Time (μs)
1-D Ideal Δh Model (Cf=.0062) Hybrid Model (Cf=.0062)

145
the low pressure case. Even though the magnitude of the shear forces are significantly
higher in this high pressure case, their relative importance compared to the head wall
force is greatly diminished. In the low pressure case the integrated shear forces
accounted for 10% of the head wall force, whereas here the same value is only 2%.
Shifting focus to the bottom half of Figure 6.13, the heat loss curves again rise
to a maximum as the detonation reaches the tube exit at 70 μs. As the detonation exits
the tube, the total energy loss due to heat transfer expressed as a percentage of the total
chemical energy release amounts to only 3% for the Δh Model and 4% for the Hybrid
Model. If the heat losses are integrated over the entire cycle these values increase to
12% and 17%, respectively. The same values for the low pressure problem were
much higher at 37% and 56%.
In general, as P1 is increased the effect of wall losses on the flowfield is
diminished. This is the expected trend as Reynolds number is increased in any
Figure 6.13 Simulated forces and energy sources (or sinks) for high pressure case.
0 200 400 600 8000
1
2
3
4
Time (μs)
Che
mic
al E
nerg
y In
put (
MW
)
0.0
0.1
0.2
0.3
0.4 Δh Model (Cf=.0062) Hybrid Model (Cf=.0062)
Heat Energy O
utput (MW
)
0
50
100
150
200
Δh Model (Cf=.0062) Hybrid Model (Cf=.0062)
Hea
d W
all F
orce
(N)
0
5
10
15
20 Wall Shear Force (N
)

146
flowfield. For detonation waves the burned gas velocity and temperature are largely
insensitive to P1 over a large range of values. Consequently, the behavior of the 1-D
loss terms (Equations 6.2, 6.5, 6.8) primarily depends on how the product ρCf scales
with P1. Since the burned gas temperature is insensitive to P1, then ρ is approximately
proportional to P1. The friction coefficient (Cf) is generally proportional to Re-n,
where n is some positive fraction less than unity and depends on whether the flow is
laminar or turbulent. Since Re can be written as a function of ρ, the ρCf product is
approximately proportional to P11-n.
The head force acting during the cycle is nearly directly proportional to P1 as is
the chemical energy release (Equation 6.19) which scales with reactant density. Thus
the ratio of shear to head wall force, and the ratio of the heat loss to the chemical
energy input both scale as P1-n. It follows that as the initial pressure is increased the
relative effect of the wall losses diminishes. Consequently, if it is not possible to
decrease the L/D ratio of a detonation tube, an alternative method of minimizing the
influence of wall losses is to increase the operating pressure.
6.3.7 Comparison with Experimental Pressure History
The objective in this section is to test the ability of the 1-D models to
reproduce an experimental head pressure trace. In experiments conducted at McGill
by Kiyanda et al. (2002) the head wall pressure was recorded for a stoichiometric H2-
O2 mixture at P1=1 atm, and T1=298 K. Their detonation tube had a diameter of 6.35
cm and a length of 2.1 m. The mixture was ignited by a weak spark at the closed end
and a detonation was established at X ≈ 1/3.
The McGill experiment is simply an extension of the high pressure case study
for a detonation tube with a different geometry. This particular experiment was
chosen for comparison with the 1-D models because the L/D ratio is large enough to
see some pressure decay in to plateau region, but not so large that the initial plateau
pressure is significantly offset from ideal theory due to condensation effects. Further
discussion of condensation effects will be postponed until the next section. The

147
resulting pressure history (unpublished) from the McGill experiments is shown Figure
6.14.
As evident, the experiment reveals a decaying pressure in the plateau region
characteristic of the simulations which include wall losses. The pressure spike at the
end of the plateau region is due to the mismatch in shock impedances between the H2-
O2 detonation products and the surrounding air which causes at shock wave to
propagate back into the tube when the detonation reaches the exit [Wintenberger
(2002)]. Since the 1-D exit boundary condition used in the models does not account
for the thermodynamic properties of the ambient gas, this reflected shock is not
captured. Nevertheless, both the Δh and Hybrid Models do a reasonable job of
capturing the pressure decay throughout most of the plateau region. Towards the end
of the plateau region and throughout the blowdown, the models tend to over-predict
the experimental profile. This over-prediction could be connected to the simplified 1-
D exit boundary condition or to condensation effects that will be discussed later.
Figure 6.14 Comparison of simulated head pressure to measurements from Kiyanda et al. (2002) for stoichiometric H2-O2 at P1=1 atm, T1=298 K.
0 2 4 6 80
2
4
6
8
10
Hea
d P
ress
ure
(atm
)
Time (ms)
McGill Experiment Ideal Model Δh Model (Cf=.0062) Hybrid Model (Cf=.0062)

148
Another important point should be made regarding the effect of wall friction
on the head pressure trace. When the results from the ΔT Model without the inclusion
of frictional effects is plotted (not shown) against the other curves in Figure 6.14, the
resulting trace lies nearly coincident with the Δh Model. On the other hand, when the
ΔT Model is implemented as usual with the effects of friction included, the curve (not
shown) is shifted up and lies coincident with the 1-D Ideal Model. Thus, it is possible
to get fortuitously good agreement with experimental data by using a model which
significantly under predicts heat transfer, but neglects frictional effects. This is the
case because heat loss tends to cause larger pressure decay whereas friction tends to
mitigate the pressure decay due to the conversion of kinetic energy into thermal
energy within the boundary layer. Both effects are of similar magnitude and it is
important to model them simultaneously in order to get a physically correct
representation of the experiment.
Based on the work presented up until this point a solid understanding has been
developed for how wall heat transfer and friction influence the head pressure and
impulse in a detonation tube. Provided additional effects such as condensation can be
neglected, the Hybrid Model and to a lesser extend the Δh Model should provide
accurate impulse predictions. In Radulescu (2005) it was shown that a number of
different experimental pressure histories were well predicted using a form of the ΔT
Model that did not account for friction. Incidentally, this formulation tends to give
head pressure profiles very similar to the Δh Model, due to the offsetting effect of
neglecting friction and under-predicting heat transfer. Consequently, the Δh Model is
expected to have similar success in reproducing the experimental pressure data in
Radulescu’s work. Interestingly, all of the head pressure data in Radulescu’s paper
was taken in tubes with relatively large diameters (≥ 5 cm) and L/D ratios less than 50.
As will become evident in the next section, when the diameter becomes sufficiently
small and the L/D ratio sufficiently large, any model that accounts solely for heat
transfer and frictional effects will be inadequate.

149
6.4 Condensation Effects Water vapor is abundant in the products of typical fuel-oxygen detonation
experiments. The mole fraction of water in the major products of common fuels
ranges from as little as 0.33 in C2H2-O2 mixtures to 1.0 for H2-O2 detonations. Many
facilities used to collect detonation tube impulse data are operated in single-shot mode.
Consequently, due to the relatively large mass and high thermal diffusivity of typical
steel or aluminum wall materials, the surface temperature is likely to remain below the
saturation temperature (Tsat) throughout some, if not all of the experiment. This same
reasoning justified the use of an isothermal boundary condition in the Navier-Stokes
Model.
Near the cool wall surface a thermal boundary layer develops. As the
combustion products move into this cool boundary layer, either by convective or
diffusive transport mechanisms, radical recombination occurs and more water is
produced. In order for the major-product water mole fraction to be realized the
temperature need only drop in the vicinity of 2500 K at typical plateau pressures. As
the water molecules cool further they eventually drop below Tsat near the wall. At this
point phase change can take place leading to the accumulation of liquid water on the
wall surface.
As water begins condensing on the wall there is a suction effect on boundary
layer as water molecules are removed from the gas phase. This suction effect thins
both the thermal and momentum boundary layers that are growing at the gas-liquid
interface and can significantly enhance the local heat transfer and shear stress [Mills
(1999), Moffat and Kays (1984)]. Thus, in addition to the removal of moles from the
gas phase, there is also enhanced heat transfer and friction, which have the net effect
of increasing pressure loss. Thus, condensation at the walls involves both a mass
transport process and an augmentation of the heat transfer and shear stress at the phase
interface.
Condensation has been observed previously in the detonation tube that will be
used for the experiments in this work. In optical measurements performed by Sanders
et al. (2001) it was determined that a thin condensate film developed on the sapphire

150
windows during a single firing of a P1=1 atm, T1=298 K, stoichiometric C2H4-O2
mixture. By analyzing the reflected transmission signal from the laser, Sanders was
able to infer a condensation layer thickness of 162.5 nm occurring 245 μs after the
passage of the detonation wave. Since the thermal product of sapphire (kρc)1/2 is quite
high, being 20% larger than stainless steel and approximately half the value of
aluminum, it is expected that the surface temperature history of all these materials will
be nearly isothermal. Thus, during the development of the approximate condensation
model to follow, it is assumed that the condensation layer will grow at the same rate
on a metal wall as it did on the sapphire window.
6.4.1 Experimental Setup
In order to investigate whether condensation has an effect on PDE
performance, head pressure measurements were made in three different detonation
tubes with the walls at room temperature (Tw=293 K) for the first data set, and heated
(Tw=376 K) in the second data set. By heating the tube walls the goal is to
significantly reduce the condensation rate. The nominal detonation tube configuration
used for experiments is 1.6 m long and 3.81 cm in diameter. For the present work
three different aluminum inserts, also 1.6 m in length, were fabricated to slide
snuggling into the existing facility so that different diameters and L/D ratios could be
tested. The inner diameters of the tubes vary successively by a factor of two and are
31.75 mm, 15.88 mm and 7.94 mm. For brevity they will be referred to as the 32 mm,
16 mm and 8 mm inserts. The corresponding L/D ratios are 50.4, 100.8 and 201.6. In
order to accomodate the mixture injection plumbing, ignition system, and pressure
transducers, each of the inserts has 10 small holes. These holes constitute 0.04%,
0.6% and 3% of the tube volume for the 32 mm, 16 mm and 8 mm inserts,
respectively.
In order to ensure uniformity, the stoichiometric C2H4-O2 mixture used for
these experiments was allowed to diffusively mix for 48 hours in a high pressure gas
cylinder. The stoichiometry of the mixture injected into the gas cylinder was
determined by the method of partial pressures and later verified using a diode-laser

151
based ethylene sensor [Barbour et al. (2005)]. Prior to each run, the detonation tube
was evacuated to approximately 200 mtorr before the premixed C2H4-O2 mixture was
admitted to the detonation tube. The open end of the tube is sealed with a 0.025 mm
thick Mylar diaphragm, held in place by a retaining ring that also secures the
aluminum inserts.
After filling, the injection system is isolated from the detonation tube with a
check valve and the mixture is ignited with a 100 mJ electric spark located 6 cm from
the head wall. For all three inserts DDT occurs within 30 cm of the end wall.
Pressure measurements are recorded at 5 MHz using a recently calibrated Kistler
model 603B1 transducer which is isolated from the hot detonation products with a thin
layer (~2 mm) of high temperature silicon rubber. The output from the transducer is
relayed to a Kistler model 5010B charge amplifier which uses a 180 kHz low pass
filter. When making accurate pressure measurements it is important to realize that the
factory calibration is for a particular amplifier/filter combination. This has been
appropriately accounted for in this work.
In order to heat the tube walls, electrical resistance heating tape was employed.
Two 3 m sections of 500 Watt, Amptek Duo-Tape were connected in series and
wrapped helically around the outside of the stainless steel tube into which the
aluminum inserts were installed. The temperature was controlled with a single voltage
regulator which operated both sections of the heating tape. Fiberglass cloth was
wrapped around the entire assembly forming a 2-3 cm thick insulative layer. The
thickest walled insert took overnight to reach a steady-state temperature, while the thin
walled insert reached steady-state after several hours. The temperature of the inner
wall surface was monitored with a thermocouple at six measurement stations evenly
spaced along the axis of the tube. Once the temperature reached steady state the
average standard deviation due to spatial non-uniformity for all three inserts was 7 K.
The average wall temperature in the hot wall experiments was 376 K for all of the
inserts.
Ideally it would have been possible to heat the tube to 500 K since this is the
saturation temperature for the maximum expected partial pressure of water. In

152
Sanders’ experiments he was able to completely remove the observed condensation
layer by locally heating the sapphire windows to 500 K. Unfortunately, it was not
possible to heat the entire detonation tube to this high of a temperature with the current
experimental setup. Nevertheless, as will be evident, the 376 K wall temperature
mitigates the condensation rate sufficiently to observe a significant effect on the head
pressure and resulting impulse.
6.4.2 Condensation Modeling & Numerical Setup In an effort to understand how condensation may affect the flowfield, a simple
1-D modeling strategy is developed using the framework illustrated in Figure 6.15. It
is assumed that an annular flow pattern develops behind the detonation with the high-
velocity gas core completely separated from the thin liquid film on the wall. The thin
film assumption is quite reasonable since if the detonation products were cooled
sufficiently such that only CO2 and H2O remained, the accumulation of all the
available H2O on the wall would only produce a 0.9, 1.8, and 3.6 μm thick film layer
on the 8, 16 and 32 mm tubes respectively. Clearly these characteristic film
thicknesses are much smaller than their corresponding tube diameters.
The dotted line illustrated in Figure 6.15 represents the control volume used to
formulate the present model. As evident, the bottom surface of the control volume is
drawn just above the gas-liquid phase interface. Condensation effects will be
symmetry line
inflow outflowsink terms
liquid filmwall
gas phase
symmetry line
inflow outflowsink terms
liquid filmwall
gas phase
Figure 6.15 Framework used in the formulation of the 1-D condensation models.

153
approximated by considering the 1-D Euler equations supplemented with sink terms
accounting for the transport of mass, momentum and energy across this interface due
to the mass transport of water vapor out of the gas phase. In order to develop these
sink terms it is necessary to know the mass removal rate of water from the control
volume, which is given by Equation 6.20 below.
( ) δπρδδπρ &&& xDrxm condcondcond Δ≅−Δ= 2 (6.20)
Here ρcond is the density of the liquid film which is evaluated at a representative
saturation temperature and assumed constant at 853 kg/m3. The approximation at the
end of Equation 6.20 is valid when the condensation layer thickness (δ) is small
relative to the tube radius. Since empirical correlations for forced-convection
condensation heat transfer coefficients (hcond) [Mills (1999)] have very weak diameter
dependence, and the associated condensation heat transfer is given by hcondAwΔT ≈
condm& hfg, it follows that condm& is directly proportional to the tube diameter. This
proportionality holds true in Equation 6.20 if δ& is assumed to be independent of
diameter. Thus, the thin film growth rate will be assumed to be given by the same
expression for all three tube inserts.
The condensation layer growth will be approximated using the experimental
data from Sanders et al. (2001). In the first formulation, which will be refereed to as
the Linear Model, the film thickness (m) and growth rate (m/s) are given by Equations
6.21 and 6.22.
ltE 361.3 −=δ (6.21)
361.3 −= Eδ& (6.22)
In the second formulation, referred to as the Non-Linear Model, the film is assumed to
grow proportional to the square root of time as shown in Equations 6.23 and 6.24.

154
ltE 542.2 −=δ (6.23)
ltE 521.1 −
=δ& (6.24)
The constants in both the Linear and Non-Linear Models have been chosen to
fit Sanders’ data. The use of two different growth rates was motivated by shock tube
experiments conducted by Maerefat et al. (1989) who observed the condensation layer
on the end wall of a shock tube to grow linearly at early times after the reflection of
the shock wave, followed by a transition to t1/2 dependent growth at later times. These
experiments validated the findings in the analytical studies of Fujikawa (1987).
To evaluate the energy loss associated with the mass transfer of water out of
the gas phase, the temperature of an exiting molecule needs to be estimated. For
C2H4-O2 combustion the mole fraction of water, assuming major products exist at the
gas-liquid interface, is 0.5. Since the pressure across the tube diameter is
approximately constant, the partial pressure of water at the interface is just half the
core pressure. Using this partial pressure, Tsat can be evaluated in each computational
cell. The stagnation enthalpy of the water leaving the control volume is given by
Equation 6.25. For the condensation rates in the present problem the kinetic energy
term is negligible, however it is retained for completeness.
2
0
21)( ⎟⎟
⎠
⎞⎜⎜⎝
⎛+=
wcond
condsatcondcond A
mThh
ρ&
(6.25)
From the development above, the condensation sink terms to appear in the
source vector O in the 1-D, reacting Euler equations (Equation 2.10) can be derived.
These terms for the water continuity, axial momentum and energy equations are given
by equations 6.26-6.28, respectively.

155
Vm
m condcond
&& −=''' (6.26)
Vum
F condcond
&=''' (6.27)
Vhm
Qocondcond
cond
&−=''' (6.28)
In the above formulation the condensation mass flow rate out of the control volume is
by convention a positive quantity. In the derivation of the momentum term it is
assumed that the condensate leaves normal to the control volume surface with no axial
velocity component. It is also assumed in the derivation of the energy term that the
heat of vaporization (hfg) released during the phase change just outside the control
volume does not result in any heat flux back into the gas phase. This is a reasonable
assumption since the heat transfer will occur in the direction of the cool wall rather
than back into the hot combustion products. For further insight into the derivation of
these terms for the general case of 1-D flow with mass addition the reader is referred
to Chapter 19 in Zucrow and Hoffman (1977).
In addition to mass transport phenomena occurring at the gas-liquid interface
there is also enhanced heat transfer and friction. As discussed previously these losses
are magnified in presence of condensation due the suction effect on the boundary layer
at the interface. Due to the lack of experimental data or theory for the particular
conditions in this problem, there is no clear way to assess how suction affects Cf or St.
Consequently, the Hybrid Model with Cf = 0.0062 will be used as a conservative
estimate of the heat loss and friction occurring at the gas-liquid interface. Based on
this assumption the condensation model is expected to underestimate the resulting
losses. However, it will give a least an approximate representation of the effects of
condensation. The use of the same Cf that was calibrated using P1=1 atm, H2-O2 heat
flux data is justified by the results in Figure 6.16.

156
In Figure 6.16 the wall heat flux and shear stress predicted by the Toronto
Model are plotted for stoichiometric H2-O2 and C2H4-O2 at P1=1 atm. As evident, the
heat fluxes are nearly identical and the wall shear stress profiles are not different by a
significant enough fraction to justify recalibrating Cf for this new mixture.
In the numerical simulations implementing the two condensation models the
full scale geometry of the experiments is modeled. An axial grid spacing of 100 μm is
used, just as in the high pressure case study. When the water vapor has been depleted
from a computational cell the condensation terms are deactivated and the hw,eq term is
evaluated assuming only CO2 exists at the gas-liquid interface. The gas phase
chemistry is modeled using the chemical mechanism developed by Singh and
Jachimowski (1994) which consists of 10 reactions amongst 9 species. The
simulations are initialized using a 30 atm, 3000 K spark region occupying the 1 mm
region adjacent to the end wall.
Figure 6.16 Comparison of Toronto Model predicted heat flux and shear stress for stoichiometric H2-O2 versus C2H4-O2 at P1=1 atm, T1=298 K.
0 200 400 600 8000
5
10
15
20
25
30
35
40 Toronto Model: H2-O2
Toronto Model: C2H4-O2
Wal
l Hea
t Flu
x (M
W/m
2 )
Time (μs)
Xmeas = 0.5 m
0 40 80 120 160 2000
1
2
3
4
5
6
7
Wal
l She
ar S
tress
(kP
a)
Time (μs)

157
6.4.3 Condensation Results – Performance Impact In Figure 6.17 and 6.18 head wall pressure is plotted versus time for the cold
wall (Tw=293 K) and hot wall experiments (Tw=376 K), respectively. The head
pressure predicted by the 1-D Ideal Model is also shown for reference. In both
experiments P1=1 atm and T1=Tw. Since P1 is held constant between the cold and hot
wall experiments the reactant density is lower for the hot wall cases. This is why the
ideal predictions differ from one another. The experiments have been aligned in time
using the initial pressure rise since the smaller diameter inserts tended to undergo
DDT slightly sooner than the largest diameter insert. The pressure spike at the end of
the plateau region, most evident in the 32 mm traces, is due to the partial reflection of
the detonation wave off the Mylar diaphragm. In these experiments the average wave
velocity after DDT deviated from C-J theory by no larger than 3% for all tube
diameters.
It is immediately evident in the cold wall data in Figure 6.17 that the starting
value of the plateau pressure deviates from theory by an increasing amount as the
diameter is reduced. The same trend is not as evident in the hot wall data set in Figure
Figure 6.17 Cold wall (293 K) head pressure measurements. Ideal Model contains no wall losses.
0 1 2 3 4 5 60
2
4
6
8
10
12
14
Hea
d Pr
essu
re (a
tm)
Time (ms)
1-D Ideal Model D=32 mm D=16 mm D=8 mm
0 1 2 3 4 5 60
2
4
6
8
10
12
14
Time (ms)
1-D Ideal Model D=32 mm D=16 mm D=8 mm
Figure 6.18 Hot wall (376 K) head pressure measurements. Ideal Model contains no wall losses.

158
6.18. Within both data sets, as expected, the rate of pressure decay in the plateau
region increases as the tube diameter decreases and the L/D ratio increases. However,
comparing the hot wall data to the cold wall data reveals that the slope of the pressure
decay is milder when the wall is heated. Thus, it appears the elevated wall
temperature may be effective at reducing the condensation rate and associated pressure
losses.
To further quantify the differences between the cold and hot wall experiments,
Isp,head has been computed for each case and is summarized in Table 6.4. Here Isp,head is
computed in the usual way by integrating the head force in time until it decays to zero
(i.e. Phead = 1 atm) and then dividing by the mixture weight. Wall shear stress forces
are not accounted for in computing Isp,head. The standard deviation is given next to the
Isp,head measurements, indicating the repeatability across several experiments. The hot
wall experiments have slightly larger standard deviations presumably due to the effect
of small wall temperature inconsistencies between runs. Table 6.4 also shows
predicted Isp,head using the Hybrid Model, as well the Hybrid Model with and without
the inclusion of the Linear and Non-Linear Condensation Models.
Twall Exp. or Model
Heat + Friction Condensation Isp,head(s)
8 mm Isp,head(s) 16 mm
Isp,head(s)32 mm
Cold Experiment Yes Yes 41 ± 1 89 ± 1 129 ± 1 Hot Experiment Yes Yes 68 ± 2 117 ± 5 144 ± 3 Cold Hybrid Yes No 139 158 168 Hot Hybrid Yes No 132 150 161 Cold Hyb./Lin. Yes Yes 95 122 145 Cold Hyb./NonLin. Yes Yes 86 110 127
Table 6.4 Summary of Isp,head between hot wall (376 K) and cold wall (293 K) cases.
The first observation to make in Table 6.4 is that the hot wall Isp,head exceeds
the cold wall value by 66%, 31% and 12% for the 8, 16 and 32 mm diameter inserts.
Thus, heating the wall by only 103 K has a very substantial effect on performance,
especially for the smallest diameter insert. It may be tempting to attribute this
increased performance to decreased heat transfer in the hot wall experiments.
However, increasing the wall temperature by 103 K has very little effect on the heat

159
transfer since the freestream temperature is so high relative to the wall. This was
further verified using the Toronto Model. In fact, in the absence of condensation
effects, the Hybrid Model results in Table 6.4 reveal the hot wall experiments are
actually predicted to have lower performance than the cold wall cases due to the small
inverse sensitivity of Isp to T1. This is opposite from the experimental trend and
strongly suggests an additional loss mechanism is important besides heat transfer and
friction.
Another possible effect that could have an influence on the observed results is
flame quenching near the cold walls. It could be argued that in the cold wall
experiments a larger fraction of the fuel remains unburned in the cool boundary layer
than in the hot wall experiments, leading to the observed performance trend. This
argument is believed to be invalid for two reasons. First, the wall temperature has not
been raised significantly relative to the autoignition temperature and any flame
quenching effects are expected to be nearly identical between the hot and cold wall
cases. Secondly, since the detonation wave speed is proportional to the square root of
the chemical energy release, a significant amount of unburned fuel should lead to
noticeable deviations from VCJ. However, as stated previously, the wave speed
remains within 3% of VCJ in the present experiments.
While flame quenching and heat transfer effects are not sufficient to account
for the experimental observations, Table 6.4 reveals that the addition of the Linear and
Non-Linear Condensation Models has a substantial impact on the simulated
performance. This is especially true for the 8 mm diameter insert. Since the
condensation models are expected to underestimate the heat loss and friction at the
gas-liquid interface it is not surprising that these models still over-predict the
experimental results. Nevertheless, they are in much better agreement with
experiment than the Hybrid Model alone. The corresponding pressure traces for each
of the cold wall simulations is shown below in Figures 6.19 and 6.20.

160
In Figure 6.19 a comparison is made between the Hybrid Model with and
without the inclusion of the Non-Linear Condensation Model. The Hybrid Model is
representative of the pressure history that would be expected in the absence of
condensation (i.e. Tw=500 K). As evident, the inclusion of the Non-Linear
Condensation Model causes a much larger rate of pressure decay than when only heat
transfer and friction are considered. At early times the pressure decay is most rapid
since both the condensate film growth rate and conductive heat transfer terms are
proportional to tl-1/2. As time elapses the magnitude of these terms decreases and
consequently the rate of pressure decay in the plateau region also diminishes. This
behavior is qualitatively consistent with the cold wall experiments.
In Figure 6.20 the Linear and Non-Linear Condensation Models are compared.
At very early times (tl < 45 μs) the Non-Linear Model has a thicker film layer than the
Linear Model, however the opposite is true for all times after tl = 45 μs. Similarly, the
film growth rate in the Non-Linear Model is smaller than that of the Linear Model for
all times after 11 μs. As a result, the Linear Model produces the most rapid pressure
decay. Due to non-ideal gauge response after the first pressure spike in the cold wall
experiments (Figure 6.17), it is likely that the apparent initial pressure offset in the
Figure 6.19 Comparison of simulated head pressure from Hybrid Model with and without Non-Linear Condensation Model for cold wall case.
Figure 6.20 Comparison of simulated head pressure from Linear and Non-Linear Condensation Models for cold wall case.
0 1 2 3 4 5 6 7 80
2
4
6
8
10
12
14
Hea
d P
ress
ue (a
tm)
Time (ms)
32 mm - Hybrid 16 mm - Hybrid 8 mm - Hybrid 32 mm - Hybrid/Non-Linear 16 mm - Hybrid/Non-Linear 8 mm - Hybrid/Non-Linear
0 1 2 3 4 5 6 7 80
2
4
6
8
10
12
14
Time (ms)
32 mm - Hybrid/Non-Linear 16 mm - Hybrid/Non-Linear 8 mm - Hybrid/Non-Linear 32 mm - Hybrid/Linear 16 mm - Hybrid/Linear 8 mm -Hybrid/Linear

161
plateau region could be from the rapid (but finite) initial pressure decay predicted in
the condensation models. Clearly the pressure decay rate in the Hybrid Model alone is
not sufficient to account for the large observed initial offset.
Close examination of the Linear Model results reveals a kink in the pressure
traces occurring at 0.19, 0.38 and 0.76 ms for the 8, 16 and 32 mm inserts,
respectively. This kink corresponds to the complete removal of water vapor at the
head wall. The complete removal of water vapor at the head wall occurs much later in
the cycle for the Non-Linear Model. In this case it takes 0.8 ms for the 8 mm insert,
2.76 ms for the 16 mm insert and it does not occur until after the cycle has completed
for the 32 mm insert. In general, it is clear that the pressure can exhibit quite different
behavior depending on the assumed film growth rate.
As water is removed in the condensation models the gas chemistry shifts to try
and minimize the change. Initially, combustion products such as H, O, OH, O2 and H2
exothermically recombine to form more water. As recombination occurs the
associated heat release causes the temperature to rise relative to models that do not
include water removal. The chemistry then shifts again in response to the higher
temperatures via the dissociation of CO2 into CO and O. In reality, the recombination
reactions that produce more water are expected to occur near the gas-liquid interface
since this is where the water is being removed via mass transport. Consequently, most
of the heat release associated with the recombination is expected to flow towards the
cool wall and not back into the gas phase. Thus, the observed temperature rise and
subsequent CO2 disassociation (not shown) observed in the 1-D models is expected to
occur to a much lesser extent if a multidimensional condensation model were
available. The brief discussion here is intended to merely highlight the additional
complexity chemical effects introduce on top of the mass transport problem.
Before concluding, the influence of wall heat transfer, friction and
condensation on the performance of the current facility is summarized in Figure 6.21.
The experimental data and the cold wall Hybrid Model results have been
asymptotically fit so that they extend over a wider range of diameters. All results,
other than the measurement by Cooper (2002), are for a 1.6 m long tube. The Hybrid

162
Model curve reveals the impact of heat transfer and friction alone. It is expected that
experiments with wall temperatures higher than 376 K would be shifted into closer
agreement with the Hybrid Model due to the decreasing influence of condensation.
For a particular diameter the vertical distance between the ideal Isp and the
Hybrid Model curve indicates the importance of heat transfer and friction in the
absence of condensation. Similarly, the vertical distance between the Hybrid Fit and
the experimental data indicates the significance of condensation effects. Clearly,
whenever the effects of heat transfer and friction are significant, so are the effects of
condensation. Naturally, for increasingly large diameter tubes, and smaller L/D ratios,
the effects of wall losses become negligible. This explains why Cooper’s
measurement (L/D=13) is in quite good agreement with ideal theory. However, as the
tube diameter decreases and L/D increases, it is clear that condensation is the
dominant performance loss mechanism.
Figure 6.21 Performance versus diameter for stoichiometric C2H4-O2 at P1=1 atm in 1.6 m long facility.
10 20 30 40 50 60 70 80 90 1000
20
40
60
80
100
120
140
160
180
200
I sp,h
ead (s
)
Diameter (mm)
Hot Wall Data (376 K) Cold Wall Data (293 K) Hot Data Fit Cold Data Fit Cold Hybrid Model Fit
Ideal Isp (no wall losses)
(Cooper 2002*)
L=1.6 m
*L=1.02 m
Δh+f : effect of heat transfer & frictionΔc : effect of condensation
Δh+f
Δc

163
6.5 Conclusions In this work several different 1-D models are evaluated for quantitatively
predicting the effects of wall heat loss and shear stress on detonation tube impulse. In
order to assess the validity of the proposed formulations a reacting, axisymmetric
Navier-Stokes model is used to directly compute the wall losses for a low pressure
model problem and provide benchmark results. Comparison of the Navier-Stokes
results with the 1-D models reveals several important conclusions. First, a Reynolds
analogy approach can be used to simultaneously predict the convective heat flux and
shear stress using a constant friction coefficient (Cf), provided the formulation
proposed in the Δh Model is utilized. It is further demonstrated that in order to get the
best agreement with the Navier-Stokes Isp predictions, conductive heat loss needs to be
captured. This is done by combining the convective heat loss from the Δh Model with
the conductive heat loss from the Toronto Model to form a new Hybrid Model. The
resulting model reproduces Navier-Stokes Isp predictions for the low pressure case
with less than 2% error.
In order to extend the 1-D formulations to higher pressures (P1 = 1 atm) typical
of laboratory experiments it is necessary to recalibrate Cf. A value of Cf = 0.0062 is
found to adequately reproduce H2-O2 heat flux measurements and is also shown to be
valid for C2H4-O2 mixtures as well. Comparison of the high pressure and low pressure
results for H2-O2 detonations reveals that wall heat transfer and friction have less
impact on the flowfield as the operating pressure is increased. Using the Δh and
Hybrid Models, reasonably good agreement is obtained with experimental head
pressure histories taken by Kiyanda et al. (2002) in a 6.35 cm diameter, 2.1 m long
(L/D=33) detonation tube. Nevertheless, it is clear the models still under-predict the
losses to some extent and a more stringent test in tubes with much higher L/D is
required.
Head pressure measurements are recorded for stoichiometric C2H4-O2
detonations in 1.6 m long tubes with 8, 16 and 32 mm diameters. The corresponding
L/D ratios are 200, 100 and 50, respectively. In the first set of experiments the tube
walls are unheated (293 K) and the resulting pressure traces show large deviations

164
from ideal theory. Using the Hybrid Model it is shown that heat transfer and frictional
effects alone are not sufficient to reproduce the experiments. A second set of
experiments is conducted with heated (376 K) tube walls in order to test whether
condensation could account for the additional disparity between theory and
measurement. The pressure traces from these experiments start closer to theory at
early times and produce 66%, 31%, 12% more Isp than the corresponding cold wall
experiments for the 8, 16 and 32 mm diameter tubes, respectively.
Using experimental condensation film growth data, a simple 1-D model is
formulated to predict the influence of water removal on the head pressure and impulse
in the cold wall experiments. Although it is known that condensation can significantly
augment the heat transfer and shear stress at the gas-liquid interface, the Hybrid Model
is used as a conservative approximation. In the first condensation model formulation
the condensation layer is assumed to grow linearly in time, and in the second it is
assumed to grow in proportion with the square root of time. Both the Linear and Non-
Linear Condensation Models predict significantly larger pressure loss relative to the
Hybrid Model alone which accounts only for heat transfer and friction. The
condensation models also reproduce the rapid, early-time pressure decay observed in
the cold wall experiments. It is concluded that condensation-induced losses are the
dominant performance loss mechanism relative to heat transfer and friction in the
absence of condensation.
For multi-pulse detonation tube operation the wall temperatures become much
hotter than in single-shot experiments. Consequently, the effects of condensation are
expected to be absent in these devices provided the wall temperature remains in excess
of the maximum saturation temperature. For these conditions the use of the Hybrid
Model alone should be sufficient for performance predictions. Wall cooling strategies
for detonation tubes, like those presented by Ajmani et al. (2005), should take care not
to cool so effectively that the wall temperature drops below the maximum saturation
temperature in order to maximize performance.

165
Chapter 7: Conclusions & Future Work
7.1 Conclusions Two primary objectives were stated at the outset of this work. The first
objective was to develop an understanding of how nozzles affect detonation tube
flowfields and how they can be designed to maximize impulse. The second objective
was to assess the primary mechanisms causing ideal models to deviate from
experimental measurements. Below, a succinct summary will be given of how each of
these two objectives was met.
The role of nozzles in detonation tubes was considered in Chapters 3 and 4. In
Chapter 3 it is shown that the addition of a converging-diverging nozzle establishes a
reflecting wave system in the detonation tube, as evident from the successive spikes in
the velocimetry data taken just upstream of the convergent section. It is seen that the
convergent section increases blowdown time and consequently enhances the relative
importance of wall losses such as heat transfer. In Chapter 4, a reacting, Q1-D model
was used to parametrically assess optimal area ratio design in unsteady detonation
tube nozzles. Based on this analysis it is concluded that an optimally-expanded,
purely-diverging nozzle generates the maximum single-cycle Isp. Furthermore it is
shown that the optimal expansion ratio (Aexit/Athroat) is well approximated by using
simple isentropic, gasdynamic relations in combination with the time-averaged
stagnation pressure at the end wall (Po,avg).

166
Experiments using optimally expanded diverging and converging-diverging
nozzles confirm the conclusions of the parametric study. Despite the fact the
experiments are conducted at high back pressure, where potential nozzle performance
augmentation is limited, the diverging nozzle outperforms the C-D nozzle and
straight-tube extensions by 13%. High-speed, schlieren imaging is applied for first
time to detonation tube nozzles. The images reveal complex wave dynamics in the
converging-diverging nozzle and confirm that the purely diverging nozzle chokes soon
after the passage of the detonation wave. Particularly notable in the schlieren images
were the X-shaped waves which are believed to be caused by the reflection of the non-
planar detonation front near the wall. The X-waves and the observed retonation are
explored further in Appendix C.
The second objective of this thesis was to determine the primary mechanisms
causing experiments to deviate from ideal theory. In Chapter 3 it is determined that
the arrival time of the reflecting wave system apparent in the C-D nozzle velocity data
can only be accurately predicted by accounting for wall heat loss. In Chapter 4 it is
seen that discrepancies as large as 28% are observed between computed and measured
Isp. The bulk of this discrepancy is attributed to the inability of the model to capture
the pressure (force) history in the plateau region. Especially concerning is the
significant deviation from theoretical P3 almost immediately after ignition. Results
from Chapter 5 reveal that the neglect of realistic transverse wave structure in 1-D
models does not prevent them from predicting head wall pressure in agreement with
more sophisticated, multidimensional models. Consequently, it is concluded that
neglect of detailed detonation structure is not the source of the performance
discrepancies observed in Chapter 4.
In Chapter 5 the effects of non-ideal wall losses are the primary focus. An
efficient, 1-D modeling strategy is developed that accounts for convective and
conductive heat transfer in addition to shear stress. The 1-D model formulation is
validated at low pressure using results from a reacting, Navier-Stokes simulation and
extended to high pressure via calibration against measured heat flux data. Comparison
of model results to experiments in tubes with diameters as small as 8 mm and

167
L/D=200 reveal that the effects of heat transfer and friction alone are not sufficient to
explain experimental pressure losses. Additional experiments with heated tube walls
reveal for the first time that condensation of water vapor in the combustion products
can substantially lower detonation tube performance. An approximate condensation
model is developed to gauge the influence of mass transport of water vapor out of the
gas phase. It is concluded from the model results that condensation can cause rapid
head pressure loss immediately after ignition, as is observed in the cold wall
experiments. Furthermore, it is shown that condensation effects are the dominant wall
loss mechanism compared to heat transfer and friction alone. These results reconcile
long-standing performance discrepancies between measured and predicted impulse as
observed in Chapter 4. The analysis in Chapter 6 represents the most comprehensive
treatment of the influence of wall losses on detonation tube performance to date.
7.2 Future Work In addition to satisfying the two primary objectives discussed above, another
important outcome of this work was the development of robust numerical model
capable of assessing chemically reacting, compressible flowfields containing strong
shock waves. This utilization of this model for applications outside of detonation tube
propulsion studies opens up several areas for future work. In Chapter 5 the utility of
the multidimensional model for studying fundamental detonation structure in both
weakly and highly unstable mixtures was demonstrated. In these particular
simulations diffusive transport terms were disabled as is commonly done under the
assumption that convective transport dominates. Recently there has been some
renewed interest in assessing the possibly non-negligible role of diffusive transport in
the transverse propagation of the reaction front across shear layers in irregular
mixtures [Arienti and Shepherd (2005), Massa et al. (2007)]. The model developed in
this work is well suited to investigate this problem. Simulations could be efficiently
performed in the shock-fixed frame and grid stretching could be used in the reaction
zone to resolve the small diffusive scales.
168
The developed model also has applications in modeling shock tube chemical
kinetics experiments. A small subset of the developed model has already been applied
to assessing the normally neglected effect of gas dynamic compression on temperature
and species profiles behind the reflected shock wave [Li, Owens, Davidson and
Hanson (in press)]. Non-ideal facility effects such as incident shock wave attenuation,
shock-contact surface interaction, and heat transfer effects at long test times could all
potentially be investigated using the developed model. For certain problems the full
Navier-Stokes model can be applied. However, as was the case for high P1 detonation
flowfields, when the Reynolds number becomes high, the near wall grid spacing
required to resolve boundary layer phenomena places a severe limit on the maximum
allowable time step (see Equations 2.66, 2.68). Consequently, a more efficient
approach to the problem may be to incorporate heat loss and shear stress source terms
into the 1-D conservation equations as was done in Chapter 6. The exploration of
variable-area shock tube driver sections as a method for mitigating shock attenuation
could also be investigated using the Q1-D form of model presented in Chapter 2.
Additional work could also be done to refine the approximate condensation
model proposed in Chapter 6. It would be particularly useful to make a time-resolved
condensate film thickness measurement at several locations along the axis of the tube.
Ideally this film thickness measurement could be performed simultaneously with a
spectroscopic water mole fraction and temperature measurement. These additional
datasets could be used to gain an increased understanding of the rate at which water
accumulates on the facility walls and how this accumulation affects the chemical
composition and temperature in the freestream.

169
Appendix A: Cartesian & Curvilinear Eigensystems
In order to implement the characteristic-based WENO-5M-LLF algorithm detailed in
Procedure 2.2, the eigensystem for each of the flux Jacobians (∂F/∂U, ∂G/∂U, ∂F’/∂U,
∂G’/∂U) is needed.
A.1 Conservative to Primitive Variable Transformation Matrices
A transformation matrix (M) is defined relating the conservative (U) and primitive (q)
variable sets [Busby and Cinnella (1998, 1999)]. The transformation matrix is used in
the evaluation of the left and right eigenvectors.
[ ]Tns EvuYY ,,,,,1 ρρρρ L=U (A.1)
[ ]Tns pvuYY ,,,,,1 ρρ L=q (A.2)
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
=∂∂
=
110000000100
0000010000001
21 γρρ
ρρ
vuTTT
vvvuuu
nsL
L
L
L
MMMMOM
L
L
qUM (A.3)
( ) ( ) ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−−
−−−
−−−=−
111
010
001000100
0000010000001
21
1
γγγφφφρρρρ
ρρρρ
vu
vvv
uuu
nsL
L
L
L
MMMMOM
L
L
M (A.4)

170
The supporting variables are given by:
v
p
cc
=γ (A.5)
12
22
−−
++=
γTRvueT i
ii (A.6)
( )( )ii Tvu −+−= 221γφ (A.7)
In Equation A.6, ei is the specific internal energy of species i. The remaining variables
are defined in Chapter 2.
A.2 Eigenvectors of Primitive System
The eigenvectors of the primitive Jacobians (i.e. M-1[∂F/∂U]M) are summarized here
and used later to construct the eigenvectors for the conservative Jacobians needed in
Procedure 2.2:
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−
=
110000
~~~000
~~~000
0100
0010
0001
22
22
22
21
21
L
L
L
L
MMMMOMM
L
L
ak
ak
k
ak
akk
aY
aY
aY
aY
aY
aY
yyx
xxy
nsns
ρρ
ρρ
P (A.8)

171
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−
−
−
−
=−
21~
21~
21000
21~
21~
21000
0~~000
00100
00010
00001
2
22
21
1
yx
yx
xy
ns
kaka
kaka
kkaY
aY
aY
ρρ
ρρ
L
L
L
L
MMMMOMM
L
L
P (A.9)
The variables xk~ and yk~ will be defined for each case below. The frozen sound speed
is given by:
RTa γ= (A.10)
A.3 Cartesian Eigensystem
The eigenvalues of ∂F/∂U are given by:
uλ ns =+1:1 , auns +=+2λ , auns −=+3λ (A.11)
The left and right eigenvectors of ∂F/∂U are given by:
( ) 11 0~,1~ −− === MPL yx kk (A.12)
( )0~,1~
=== yx kkMPR (A.13)
Similarly, the eigenvalues of ∂G/∂U are given by:
vλ ns =+1:1 , avns +=+2λ , avns −=+3λ (A.14)
The left and right eigenvectors of ∂G/∂U are given by:
( ) 11 1~,0~ −− === MPL yx kk (A.15)
( )1~,0~=== yx kkMPR (A.16)

172
A.4 Curvilinear Eigensystem
The eigenvalues of ∂F’/∂U are given by:
'1:1 uJ
λ nsξ∇
=+ , ( )auJns +
∇=+ '2
ξλ , ( )au
Jns −∇
=+ '3ξ
λ (A.17)
Where the grid metrics and contravariant velocity are given by:
22yx ξξξ +=∇ ,
ξξξ∇
= xx
~ , ξ
ξξ
∇= y
y~ (A.18)
xx ∂∂
=ξξ ,
yy ∂∂
=ξξ ,
xyyxJ
∂∂
∂∂
−∂∂
∂∂
=ηξηξ
(A.19)
yx vuu ξξ ~~' += (A.20)
The left and right eigenvectors of ∂F’/∂U are given by:
( ) 11 ~~,~~ −− === MPL yyxx kk ξξ (A.21)
( )yyxx kk ξξ ~~,~~
=== MPR (A.22)
Similarly, the eigenvalues of ∂G’/∂U are given by:
'1:1 vJ
λ nsη∇
=+ , ( )avJns +
∇=+ '2
ηλ , ( )av
Jns −∇
=+ '3
ηλ (A.23)
Where the grid metrics and contravariant velocity are given by:
22yx ηηη +=∇ ,
ηηη∇
= xx
~ , η
ηη
∇= y
y~ (A.24)
xx ∂∂
=ηη ,
yy ∂∂
=ηη ,
xyyxJ
∂∂
∂∂
−∂∂
∂∂
=ηξηξ
(A.25)
yx vuv ηη ~~' += (A.26)

173
The left and right eigenvectors of ∂G’/∂U are given by:
( ) 11 ~~,~~ −− === MPL yyxx kk ηη (A.27)
( )yyxx kk ηη ~~,~~=== MPR (A.28)

174

175
Appendix B: Finite-Difference Formulas
The finite-difference formulas below were derived using the ideas presented in
Fornberg (1988) and Henrick et al. (2005). They are valid on uniformly spaced
Cartesian and curvilinear grids. In the development below, Fi represents an arbitrary
scalar quantity defined at node i. For curvilinear coordinates replace Δx with Δξ.
B.1 Point-Wise Finite Difference Formulas
2nd Order:
( )1121
−+ −Δ
≈∂∂
iii
FFxx
F (B.1)
( )21432
1++ −+−
Δ≈
∂∂
iiii
FFFxx
F (B.2)
( )iiii
FFFxx
F 342
112 +−
Δ≈
∂∂
−− (B.3)
4th Order:
( )2112 8812
1++−− −+−
Δ≈
∂∂
iiiii
FFFFxx
F (B.4)
( )3211 61810312
1+++− +−+−−
Δ≈
∂∂
iiiiii
FFFFFxx
F (B.5)
( )4321 31636482512
1++++ −+−+−
Δ≈
∂∂
iiiiii
FFFFFxx
F (B.6)
6th Order:
( )321123 94545960
1+++−−− +−+−+−
Δ≈
∂∂
iiiiiii
FFFFFFxx
F (B.7)
( )432112 830803524260
1++++−− −+−+−−
Δ≈
∂∂
iiiiiiii
FFFFFFFxx
F (B.8)
( )543211 21550100150771060
1+++++− +−+−+−−
Δ≈
∂∂
iiiiiiii
FFFFFFFxx
F (B.9)
( )654321 107222540045036014760
1++++++ −+−+−+−
Δ≈
∂∂
iiiiiiii
FFFFFFFxx
F

176
The coefficients for the one-sided, finite-difference formula given in Equation B.3 are
related in a simple way to the coefficients given for the mirror opposite stencil
(i=i:i+2) in the Equation B.2. The sign of the coefficients flip and the ordering for
i:i+2 stencil is the reverse of that from the i-2:i stencil. In general the following
relation can be used to generate a one-sided, finite-difference formula from the
coefficients in the mirror opposite stencil:
∑ ∑= =
−+++ −Δ
≈Δ
≈∂∂ max
min
max
min
11 n
nn
n
nnnininini
i
Fax
Faxx
F (B.11)
In Equation B.11, ai is the finite difference coefficient, nmin is the integer number of
nodes away from i on one end of the stencil, and nmax is the integer number of nodes
away from i on the opposite side of the stencil (i.e. for i-2:i+4, nmin = -2, nmax = 4)
B.2 Conservative Finite-Difference Formulas
A conservative evaluation of the derivative of F at node i is given by:
nii
i
xOxFF
xF )(2121 Δ+
Δ
−=
∂∂ −+ (B.12)
As discussed in Chapter 2, Fi+/-1/2 is understood to be an approximation of the
numerical flux function 21/ˆ
−+iH , where H is defined implicitly by:
( ) ( )∫Δ+
Δ−Δ=
2
2ˆ1 xx
xxdH
xxF εε (B.13)
In equation B.13, ε is a dummy variable of integration. Differentiation of equation
B.13 and evaluation at node i gives:
xHH
xF ii
i Δ
−=
∂∂ −+ 2121
ˆˆ (B.14)
Thus, the numerical flux function is defined so that no error is incurred when
evaluating the nodal derivative using a finite difference. Conservative schemes of

177
arbitrary order are constructed by defining Fi+1/2 to be a polynomial approximation
of 21ˆ
+iH :
1
12
2102121ˆ −
−++ ++++=≈ nnii xaxaxaaFH L (B.15)
Note that if equation B.15 is nth order accurate so is equation B.12 since the lowest
order truncation error terms cancel when the divided difference is evaluated. Several
approximations of the numerical flux function are given below.
2nd Order:
( )121 21
++ += iii FFF (B.16)
3rd Order:
( )iiii FFFF 117261
1221 +−= −−+ (B.17)
( )1121 2561
+−+ ++−= iiii FFFF (B.18)
( )2121 5261
+++ −+= iiii FFFF (B.19)
( )32121 271161
++++ +−= iiii FFFF (B.20)
4th Order:
( )21121 77121
++−+ −++−= iiiii FFFFF (B.21)
( )32121 5133121
++++ +−+−= iiiii FFFFF (B.22)
5th Order:
( )iiiiii FFFFFF 1371631376312601
123421 +−+−= −−−−+ (B.23)
( )112321 127743173601
+−−−+ ++−+−= iiiiii FFFFFF (B.24)
( )211221 32747132601
++−−+ −++−= iiiiii FFFFFF (B.25)
( )321121 21347273601
+++−+ +−++−= iiiiii FFFFFF (B.26)

178
( )432121 317437712601
+++++ −+−+= iiiiii FFFFFF (B.27)
6th Order:
( )3211221 837378601
+++−−+ +−++−= iiiiiii FFFFFFF (B.28)
( )4321121 72357222601
++++−+ −+−++−= iiiiiii FFFFFFF (B.29)
( )5432121 21337638710601
++++++ +−+−+= iiiiiii FFFFFFF (B.30)
The coefficients for mirror-opposite, one-sided difference stencils are again related in
a simple way. For example, the order of the coefficients for the i-3:i+1 stencil in
Equation B.24 are the reverse of that given for the i:i+4 stencil in Equation B.27. So
in this case the order of the coefficients still reverses but the sign of the coefficients
stays the same:
∑ ∑= =
+−++++ ≈=max
min
max
min
121
n
nn
n
nnninininii FaFaF (B.31)

179
Appendix C: Flowfield Evolution after Non-Direct Initiation
The purpose of this appendix is to elaborate on the flowfield structures that
develop when a detonation is non-directly initiated from a weak point source, similar
to the experiments of Chapter 4. In particular, it is of interest to observe the formation
of the retonation and X-wave structures that were evident in Figures 4.14-4.17. Using
the Axisymmetric Navier-Stokes Model developed in Chapter 2 is possible to study
the formation of these structures.
In the simulation results to follow a uniform grid with Δx = Δy = 0.1 mm was
used. The simulation domain is 25 cm in length and 1.905 cm across. A reflective,
no-slip, isothermal (Tw=298 K), non-catalytic boundary condition is used at the left
and bottom surfaces, while a symmetry condition is imposed across the top of the
domain. The plotted results have been mirrored about the centerline so that the
transverse dimension in Figure C.1 is 3.81 cm. At the exit plane a characteristic-based
outflow boundary condition is used [Baum et. al (1994)]. The entire domain is
initialized with stoichiometric H2-O2 at P1=1 atm and zero velocity. Other than a
small 1500 K, 1 mm radius spark region centered on the closed end wall, the rest of
the domain was initialized to 298 K. The 8-species, 34-reaction mechanism from
Westbrook (1982) is used to model the chemical kinetics.
Due to the significant computational expense of generating the results below (1
week on 20 processor cores) a grid refinement study has not been performed. At the
prescribed grid resolution neither boundary layer nor reaction zone phenomena are
resolved. Although the average detonation wave speed is in excellent agreement with
C-J theory, the effect of grid resolution on the flame speed has not been studied. As
mentioned in the introduction to this work, quantitative simulation of DDT
phenomena is still an illusive problem. Unfortunately, direct numerical simulation of
the DDT process is currently computationally prohibitive and it remains uncertain
what level of physical realism needs to be represented in models in order to

180
quantitatively reproduce experiments. The results below cannot be regarded as a
quantitative representation of the DDT process and serve only to support a qualitative
discussion of the flowfield features observed in the schlieren images of Chapter 4.
In Figure C.1 a schlieren-like plot of the density gradient is shown at eleven
different times after ignition at t=0. Next to the schlieren-like plot the temperature
field is also shown. Upon ignition, weak compression waves propagate radially
outwards from the spark region. These waves reflect off the internal surfaces of the
tube and interact with the flame front causing it to wrinkle. When the flame front hits
the wall a hot-spot is generated which subsequently spawns two semi-circular
Figure C.1 Initial flowfield evolution after non-direct initiation. Left column of images reveals schlieren-like density gradient and right column is the temperature field (K). Mixture is stoichiometric H2-O2 at T1=298, P1=1 atm.
Initiation with 1 atm, 1500 K spark region
Small compression waves formed after ignition Flame front wrinkles
Detonation forms at hot spot when flame hits wall
Detonation propagates spherically from wall and overtakes flame front
X-shaped wave pattern develops in wake region
Retonation wave apparent
Time (μs)40
100
160
165
170
175
180
200
230
250
300
Scaled |grad(ρ)| TemperatureInitiation with 1 atm, 1500 K spark region
Small compression waves formed after ignition Flame front wrinkles
Detonation forms at hot spot when flame hits wall
Detonation propagates spherically from wall and overtakes flame front
X-shaped wave pattern develops in wake region
Retonation wave apparent
Time (μs)40
100
160
165
170
175
180
200
230
250
300
Scaled |grad(ρ)| Temperature

181
detonation fronts propagating outwards from the top and bottom walls in the t=160 μs
frames. The left-running portion of the detonation quickly weakens into a retonation
wave since all the reactants near the end wall have already been consumed by the
flame. The right-running portions of the two detonations accelerate into the unburned
reactants and eventually collide with one another at the tube centerline (t~170 μs).
The collision process generates a complex system of transverse shocks and shear
layers.
By t=200 μs the detonation front has become nearly planner, similar to the
detonation fronts imaged in Chapter 4. Neither the schlieren images nor the
computations here are able to resolve the extremely fine-scale, reaction zone structure
at this high of a pressure. As is evident, the transverse waves behind the detonation
form X-shaped patterns similar to those observed in the experiments. The strength of
these waves continues to weaken, however, as the detonation propagates further from
its point of inception and they eventually detach from the front. It is suspected that the
round-to-square transition in the experimental facility may perturb the planarity of the
detonation front sufficiently to sustain this pattern through the test section. Since the
boundary layer is not resolved, the hypothesis proposed by Edwards et al. (1963)
regarding an abrupt transverse pressure gradient near the wall in the reaction zone (see
section 4.4.3.1) can neither be confirmed nor denied. However, additional simulations
were performed in the shock-fixed frame at higher, though not fully converged,
resolution (not shown) and this phenomenon was never observed.
Also evident in these simulations is the reflected shock wave trailing behind
the detonation front, just as was the case in the Chapter 4 experiments. This wave is
generated by the reflection of the retonation off of the end wall. Similar to the
detonation front, the reflected retonation also initially has a trailing X-shaped wave
pattern.

182

183
Bibliography
Ajmani K., Breisacher K.J., Ghosn L.J. and Fox D.S. (2005). Numerical and Experimental Studies of a Film Cooled Pulsed Detonation Tube. 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Tucson, AZ, July 10-13, AIAA 2005-3509.
Arienti M. and Shepherd J.E. (2005). The Role of Diffusion at Shear Layers in
Irregular Detonations. 4th Joint Meeting of the U.S. Sections of the Combustion Institute, Philadelphia, PA, March 20-23.
Aslam T. (2001). A Level-Set Algorithm for Tracking Discontinuities in Hyperbolic
Conservation Laws. Journal of Computational Physics, Vol. 167, pp. 413-438. Austin J.M. (2003). The Role of Instability in Gaseous Detonations. Doctoral
Dissertation, California Institute of Technology. Barbour E.A., Owens Z.C., Morris C.I. and Hanson R.K. (2004). The Impact of a
Converging-Diverging Nozzle on PDE Performance and its Associated Flowfield. 42nd AIAA Aerospace Sciences Meeting & Exhibit, Reno, NV, Jan. 5-9, AIAA 2004-867.
Barbour E.A., Ma L., Jeffries J.B., Hanson R.K., Brophy C.M. and Sinibaldi J.O.
(2005). Real-Time Measurements of C2H4 Concentration with Application to PDEs Operating on Oxygen and Air. 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Tucson, AZ, July 10-13, AIAA-2005-4376.
Baum M., Poinsot T. and Thevenin D. (1994). Accurate Boundary Conditions for
Multicomponent Reactive Flows. Journal of Computational Physics, Vol. 116, pp. 247-261.
Bendat J.S. and Piersol A.G. (1993). Engineering Applications of Correlation and
Spectral Analysis. John Wiley and Sons Inc., p. 45. Bowman C.T. (2003). Course Notes on Combustion. Stanford University. Brophy C.M., Werner L.S., Sinibaldi J.O. (2005). Performance Characterization of a
Valveless Pulse Detonation Engine. 41st AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, Jan. 6-9, AIAA 2003-1344.

184
Brown P.N., Byrne G.D. and Hindmarsh A.C. (1989). VODE: A Variable-Coefficient ODE Solver. SIAM Journal of Scientific and Statistical Computing, Vol. 10, No. 5, pp. 1038-1051.
Browne S. and Shepherd J.E. (2005). Numerical Solution Methods for Control
Volume Explosions and ZND Structure. California Institute of Technology, GALCIT Report FM2006.007.
Busby M.A. and Cinella P. (1998). Steps Towards More Accurate and Efficient
Simulations of Reactive Flows. 29th AIAA Fluid Dynamics Conference, Albuquerque, NM, June 15-18, AIAA-98-2425.
Busby M.A. and Cinella P. (1999). Non-Singular Eigenvectors of the Flux Jacobian
Matrix for Reactive Flow Problems. AIAA Journal, Vol. 37, No. 3, pp. 398-401.
Bussing T. and Pappas G. (1996). Pulse Detonation Engine Theory and Concepts.
Progress in Aeronautics and Astronautics, Vol. 165, pp. 421-472. Bussing T. and Pappas G. (1994). An Introduction to Pulse Detonation Engines. 32nd
AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, Jan. 10-13, AIAA 1994-0263.
Cambier J.L. and Tegner J.K. (1998). Strategies for Pulsed Detonation Engine
Performance Optimization. Journal of Propulsion and Power, Vol. 14, No. 4, pp. 489-498.
Chapman D.L. (1899). On the Rate of Explosion in Gases. Philosophical Magazine,
Vol. 47, pp. 90-104. Cooper M., Jackson S., Austin J., Wintenberger E. and Shepherd J.E. (2002). Direct
Experimental Impulse Measurements for Detonations and Deflagrations. Journal of Propulsion and Power, Vol. 18, No. 5, pp. 1033-1041.
Cooper M. and Shepherd J.E. (2004). The Effect of Transient Nozzle Flow on
Detonation Tube Impulse. 40th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Fort Lauderdale, FL, July 12-14, AIAA 2004-3914.
Deiterding R. (2000). Simulation of a Shock Tube Experiment with Non-Equilibrium
Chemistry. Technical University, Cottbus, Germany, Technical Report NMWR-00-3.
Deiterding R. (2003). Parallel Adaptive Simulation of Multi-Dimensional Detonation
Structures. Doctoral Dissertation, Technical University Cottbus, Germany.

185
Desbordes D., Manson N. and Brossard J. (1983). Influence of Walls on the Pressure Behind Self-Sustained Expanding Cylindrical and Plane Detonations in Gases. Shock Waves, Explosions, and Detonations, Progress in Astronautics and Aeronautics, Vol. 87, AIAA, pp. 302-317.
Doring W. (1943). On Detonation Processes in Gases. Annals of Physics, Vol. 43, pp.
421-436. Du X., Liu W.S. and Glass I.I. (1982). Laminar Boundary Layers Behind Blast and
Detonation Waves. University of Toronto Institute for Aerospace Studies (UTIAS) Report 259.
Eckett E.A. (2001). Numerical and Analytic Studies of the Dynamics of Gaseous
Detonations. Doctoral Dissertation, California Institute of Technology. Edwards D.H., Jones T.G. and Price B. (1963). Observations of Oblique Shock
Waves in Gaseous Detonations. Journal of Fluid Mechanics, Vol. 17, Part 1, pp. 21-34
Edwards D.H., Brown D.R., Hooper G. and Jones A.T. (1970). The Influence of Wall
Heat Transfer on the Expansion Following a C-J Detonation Wave. Journal of Physics D: Applied Physics, Vol. 3, No. 3, pp. 365-376.
Fedkiw R.P. (1997). A Survey of Chemically Reacting Compressible Flows.
Doctoral Dissertation, University of California Los Angeles. Fickett W. and Davis W.C. (2001). Detonation Theory and Experiment. Dover
Publications Inc. Fornberg B. (1988). Generation of Finite Difference Formulas on Arbitrarily Spaced
Grids. Mathematics of Computation, Vol. 51, No. 184, pp. 699-706. Fujikawa S., Okuda M., Akamatsu T. and Goto T. (1987) Non-Equilibrium Vapour
Condensation on a Shock-Tube Endwall behind a Reflected Shock Wave. Journal of Fluid Mechanics, Vol. 183, pp. 293-324.
Gordon S. and McBride B. (1994). Computer Program for Calculation of Complex
Chemical Equilibrium Copositions and Applications. NASA Reference Publication 1311.
Gottlieb S. and Shu C.W. (1998). Total Variation Diminishing Runge-Kutta Schemes.
Mathematics of Computation, Vol. 67, No. 221, pp. 73-85.

186
Groth C.P.T., Gottlieb J.J, and Sullivan P.A. (1991). Numerical Investigation of High-Temperature Effects in the UTIAS-RPI Hypersonic Impulse Tunnel. Canadian Journal of Physics, Vol. 69, pp. 897-918.
Guzik S.M. and Harris P.G. (2002). An Investigation of Pulse Detonation Engine
Configurations Using the Method of Characteristics. 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Indianapolis, IN, July 7-10, AIAA 2002-4066.
He X. and Karagozian A.R. (2003). Reactive Flowfield Phenomena in Pulse
Detonation Engines. 41st Aerospace Sciences Meeting & Exhibit, Reno, NV, Jan. 6-9, AIAA 2003-1171.
Heiser W. and Pratt D. (2002). Thermodynamic Cycle Analysis of Pulse Detonation
Engines. Journal of Propulsion and Power, Vol. 18, No. 1, pp.68-76. Henrick A.K., Aslam T.D. and Powers J.M. (2005). Mapped Weighted Essentially
Non-Osciallatory Schemes: Achieving Optimal Order Near Critical Points. Journal of Computational Physics, Vol. 207, pp. 542-567.
Hirschfelder J.O., Curtiss C.F. and Bird R.B. (1967). Molecular Theory of Gases and
Liquids. John Wiley and Sons, Inc. Hwang P., Fedkiw R.P., Merriman B., Aslam T.D., Karagozian A.R. and Osher S.
(2000). Numerical Resolution of Pulsating Detonation Waves. Combustion Theory and Modeling, Vol. 4, No. 3, pp. 217-240.
Jiang G. and Shu C. (1996). Efficient Implementation of Weighted ENO Schemes.
Journal of Computational Physics, Vol. 126, pp. 202-228. Kailasanath K. and Patnaik G. (2000). Performance Estimates of Pulsed Detonation
Engines. Proceedings of the Combustion Institute 28, pp. 595-601. Kailasanath K. (2001). A Review of Research on Pulse Detonation Engine Nozzles.
37th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Salt Lake City, UT, July 8-10, AIAA 2001-3932.
Kailasanath K. (2003). Recent Developments in the Research on Pulse Detonation
Engines. AIAA Journal, Vol. 41, No. 2, pp. 145-159. Kee R.J., Rupley F.M. and Miller J.A.. (1989) Chemkin-II: A FORTRAN Chemical
Kinetics Package for the Analysis of Gas-Phase Chemical Kinetics. Tech. Rep. SAND89-8009, Sandia National Laboratories.

187
Kee R.J., Rupley F.M., Miller J.A. et al. (2006). Chemkin Release 4.1, Reaction Design, San Diego, CA.
Kelly J. (2003). After Combustion: Detonation! Popular Science: Aviation & Space,
August issue. Kiyanda C.B., Tanguay V., Higgins A.J., and Lee J.H.S. (2002). Effect of Transient
Gasdynamic Processes on the Impulse in Pulse Detonation Engines. Journal of Propulsion and Power, Vol. 18, No. 5, pp. 1124-1126.
Laviolette J.P., Kiyanda C.B. and Higgins A.J. (2002). The Effect of Friction and
Heat Transfer on Impulse in a Detonation Tube. Canadian Section of the Combustion Institute, May 12-15, Windsor, Canada.
Lax P. and Wendroff B. (1960). Systems of Conservation Laws. Communications in
Pure and Applied Mathematics, Vol. 13, pp. 217-237. Lee J.H.S. and Moen I.O. (1980). The Mechanism of Transition from Deflagration to
Detonation in Vapor Cloud Explosions. Progress in Energy and Combustion Science, Vol. 6, pp. 359-389.
Li C. and Kailasanath K. (2002). Performance Analysis of Pulse Detonation Engines
with Partial Fuel Filling. 40th AIAA Aerospace Sciences Meeting & Exhibit, Reno, NV, Jan. 14-17.
Li H., Owens Z.C., Davidson D.F. and Hanson R.K. (in press). A Simple Reactive
Gasdynamic Model for the Computation of Gas Temperature and Species Concentrations Behind Reflected Shock Waves. International Journal of Chemical Kinetics.
Liu X., Osher S. and Chan T. (1994). Weighted Essentially Non-Oscillatory Schemes.
Journal of Computational Physics, Vol. 115, pp. 200-212. Ma F., Choi J.Y. and Yang V. (2005). Thrust Chamber Dynamics and Propulsive
Performance of Single-Tube Pulse Detonation Engines. Journal of Propulsion and Power, Vol. 21, No. 3, pp. 512-526.
Ma L., Sanders S.T., Jeffries J.B. and Hanson R.K. (2002). Monitoring and Control of
a Pulse Detonation Engine using a Diode-Laser Fuel Concentration and Temperature Sensor. Proceedings of the Combustion Institute 29, pp. 161-166.
MacCormack R.W. (1995). Numerical Computation of Compressible Viscous Flow.
Course Notes AA214, Stanford University, Stanford, CA.

188
Maerefat M., Fujikawa S., Akamatsu T., Goto T., and Mizutani T. (1989). An Experimental Study of Non-Equilibrium Vapour Condensation in a Shock Tube. Experiments in Fluids, Vol. 7, pp. 513-520.
Massa L., Austin J.M. and Jackson T.L. (2007). Triple Point Shear-Layers in Gaseous
Detonation Waves. Journal of Fluid Mechanics, Vol. 586, pp. 205-248. Mathur S., Tondon P.K., Saxena S.C. (1967). Thermal Conductivity of Binary,
Ternary and Quaternary Mixtures of Rare Gases. Molecular Physics, Vol. 12, No. 6, pp. 569-579.
Mattison D.W., Sanders S.T., Hinkley K.M., Brophy C.M., Jeffries J.B. and Hanson
R.K. (2002). Diode-Laser Sensors for Pulse Detonation Engine Applications. 40th AIAA Aerospace Sciences Meeting & Exhibit, Reno, NV, 2002, Jan. 14-17, AIAA 2002-0471.
Mattison D.W, Oehlschlaeger M.A., Morris C.I., Owens Z.C., Barbour E.A., Jeffries
J.B. and Hanson R.K. (2005). Evaluation of Pulse Detonation Engine Modeling using Laser-Based Temperature and OH Concentration Measurements. Proceedings of the Combustion Institute 30, pp. 2879-2807.
Mills A.F. (1999) Heat Transfer. Prentice-Hall. Mirels H. (1955). Laminar Boundary Layer behind Shock Advancing into Stationary
Fluid. NACA Technical Note 3401. Moffat R.J. and Kays W.M. (1984). A Review of Turbulent-Boundary-Layer Heat
Transfer Research at Stanford, 1958-1983. Advances in Heat Transfer, Vol. 16, pp. 241-365.
Morris C.I. (2005a). Numerical Modeling of Single-Pulse Gasdynamics and
Performance of Pulse Detonation Rocket Engines. Journal of Propulsion and Power, Vol. 21, No. 3, pp. 527-538.
Morris C.I. (2005b). Axisymmetric Modeling of Pulse Detonation Rocket Engines.
41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Tucson, AZ, July 10-13, AIAA 2005-3508.
Oran E.S., Weber J.W., Stefaniw E. I., Lefebvre M.H. and Anderson J.D (1998). A
Numerical Study of a Two-Dimensional H2-O2-Ar Detonation using a Detailed Chemical Reaction Model. Combustion and Flame, Vol. 113, pp. 147-163.
Osher S. and Fedkiw R. (2003). Level Set Methods and Dynamic Implicit Surfaces.
Applied Mathematical Sciences, Vol. 152, Springer.

189
Owens Z.C., Mattison D.W., Barbour E.A., Morris C.I. and Hanson R.K. (2005) Flowfield Characterization and Simulation Validation of Multiple-Geometry PDEs using Cesium-Based Velocimetry. Proceedings of the Combustion Institute 30, pp. 2791-2798.
Owens Z.C. and Hanson R.K. (2007). Single-Cycle Unsteady Nozzle Phenomena in
Pulse Detonation Engines. Journal of Propulsion and Power, Vol. 23, No. 2, pp. 325-337.
Patrick J. (1997). On the Numerical Solution of the Compressible Navier-Stokes
Equations for Reacting and Non-Reacting Gas Mixtures. Doctoral Dissertation, Swiss Federal Institute of Technology, Zurich, Diss ETH No. 12030.
Paxon D. (2003). Optimal Area Profiles for Ideal Single Nozzle Air-Breathing Pulse
Detonation Engines. 39th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Huntsville, AL, July 21-23, AIAA 2003-4512.
Poinsot T.J. and Lele S.K. (1992). Boundary Conditions for Direct Simulations of
Compressible Viscous Flows. Journal of Computational Physics, Vol. 101, No. 1., pp. 104-129.
Radulescu M.I., Sharpe G.J., Lee J.H.S., Kiyanda C.B., Higgins A.J. and Hanson R.K.
(2005). The Ignition Mechanism in Irregular Structure Gaseous Detonations. Proceedings of the Combustion Institute 30, pp. 1859-1867.
Radulescu M.I. and Hanson R.K. (2005). Effect of Heat Loss on Pulse-Detonation-
Engine Flow Fields and Performance. Journal of Propulsion and Power, Vol. 21, No. 2, pp. 274-285.
Ragland K.W. (1967). The Propagation and Structure of Two Phase Detonations.
Doctoral Dissertation, University of Michigan. Rasheed A., Tangirala V.E., Vardervart C.L., Dean A.J. and Haubert C. (2004).
Interactions of a Pulse Detonation Engine with a 2D Turbine Blade Cascade. 42nd AIAA Aerospace Sciences Meeting & Exhibit, Reno, NV, January 5-8, AIAA 2004-1207.
Reynolds W.C. (1986). The Element Potential Method for Chemical Equilibrium
Analysis: Implementation in the Interactive Program STANJAN. Technical Report, Mechanical Engineering Department, Stanford University.
Sanders S.T., Muruganandam T.M., Mattison D.W. and Hanson R.K. (2001). Diode
Laser Sensors for Detonation Flows. Paper 5733 at 23rd International Symposium on Shock Waves, Fort Worth, TX.

190
Sanders S.T., Mattison D.W., Ma. L., Jeffries J.B. and Hanson R.K. (2002a).
Wavelength-Agile Diode-Laser Sensing Strategies for Monitoring Gas Properties in Optically Harsh Flows: Application in Cesium-Seeded Pulse Detonation. Optics Express, Vol. 10, No. 12, pp. 505-514.
Sanders S.T., Mattison D.W., Jeffries J.B. and Hanson R.K. (2002b). Sensors for
High-Pressure, Harsh Combustion Environments using Wavelength-Agile Diode Lasers. Proceedings of the Combustion Institute 29, pp. 2661-2667.
Sanders S.T., Mattison D.W., Jeffries J.B. and Hanson R.K. (2003). Time-of-Flight
Diode-Laser Velocimeter using a Locally Seeded Atomic Absorber: Application in a Pulse Detonation Engine. Shock Waves, Vol. 12, pp. 435-441.
Sharpe G.J. (2001). Transverse Waves in Numerical Simulations of Cellular
Detonations. Journal of Fluid Mechanics, Vol. 447, pp. 31-51. Shi J., Zhang Y.T. and Shu C.W. (2003). Resolution of High Order WENO Schemes
for Complicated Flow Structures. Journal of Computational Physics, Vol. 186, pp. 690-696.
Shu C. and Osher S. (1989). Efficient Implementation of Essentially Non-Oscillatory
Shock-Capturing Schemes, II. Journal of Computational Physics, Vol. 83, pp. 32-78.
Shu C. (1997). Essentially Non-Oscillatory and Weighted Essentially Non-Oscillatory
Schemes for Hyperbolic Conservation Laws. NASA/CR-97-206253. Sichel M. and David T.S. (1966). Transfer Behind Detonations in H2-O2 Mixtures.
AIAA Journal, Vol. 4., No. 6, pp. 1089-1090. Singh D.J. and Jachimowski C.J. (1994). Quasiglobal Reaction Model for Ethylene
Combustion. AIAA Journal, Vol. 32, No. 1, pp. 213-216. Sjogreen B. and Yee H.C. (2003). Grid Convergence of High Order Methods for
Multiscale Complex Unsteady Viscous Compressible Flows. Journal of Computational Physics, Vol. 185, pp.1-26.
Skinner J.H. (1967). Friction and Heat-Transfer Effects on the Non-Steady Flow
Behind a Detonation. AIAA Journal, Vol. 5, No. 11, pp. 2069-2071. Smith G.P., Golden D.M., Frenklach M., Moriarty N., Eiteneer B., Goldenberg M.,
Bowman C.T., Hanson R.K., Song S., Gardiner W.C., Lissiansky V.V. and Qin Z. (2000) GRI 3.0 Mechanism. http://www.me.berkeley.edu/gri_mech/

191
Sod G.A. (1978). Survey of Several Finite-Difference Methods for Systems of Non-Linear Hyperbolic Conservation Laws. Journal of Computational Physics, Vol. 27, pp. 1-31.
Strang G. (1968). On the Construction and Comparison of Difference Schemes.
SIAM Journal of Numerical Analysis, Vol. 5, pp. 506-517. Sun M., Saito T., Jacobs P.A., Timofeev E.V., Ohtani K. and Takayama K. (2005).
Axisymmetric Shock Wave Interaction with a Cone: a Benchmark Test. Shock Waves, Vol. 14, No. 5/6, pp. 313-331.
Talley G. and Coy E. (2002). Constant Volume Limit of Pulsed Propulsion for a
Constant γ Ideal Gas. Journal of Propulsion and Power, Vol. 18, No. 2, pp. 400-406.
Taylor G.I. (1950). The Dynamics of the Combustion Products Behind Plane and
Spherical Detonation Fronts in Explosives. Proceedings of the Royal Society, A200, pp.235-247.
Thompson P.A. (1988). Compressible-Fluid Dynamics. McGraw-Hill, Inc. Turns S.R. (2000). An Introduction to Combustion. McGraw-Hill, Inc. Varatharajan B. and Williams F.A. (2002). Ethylene Ignition and Detonation
Chemistry, Part 2: Ignition Histories and Reduced Mechanisms. Journal of Propulsion and Power, Vol. 18, No. 2, pp. 352-362.
von Neumann J. (1942). John von Neumann, Collected Works, Vol. 6. Editions A.J.
Taub, New York: Macmillan. Wehe S.D., Baer D.S. and Hanson R.K. (1997). Tunable Diode-Laser Absorption
Measurments of Temperature, Velocity and H2O in Hypervelocity Flows. 33rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Seattle, WA, July 6-9, AIAA-1997-3267.
Westbrook C.K. (1982). Chemical Kinetics of Hydrocarbon Oxidation in Gaseous
Detonations. Combustion and Flame, Vol. 46, pp. 191-210. White D.R. (1961). Turbulent Structure of Gaseous Detonation. Physics of Fluids,
Vol. 4, No. 4, pp. 465-480. White F.M. (1991). Viscous Fluid Flow. McGraw-Hill, Inc. Wilke C.R. (1950). A Viscosity Equation for Gas Mixtures. Journal of Chemical
Physics, Vol. 18, No. 4, pp. 517-519.

192
Wintenberger E., Austin J.M., Cooper M., Jackson S., Shepherd J.E. (2002). Impulse
of a Single-Pulse Detonation Tube. Technical Report, Graduate Aeronautical Laboratories, California Institute of Technology. Report FM00-8, revised January 2004.
Wintenberger E., Austin J.M., Cooper M., Jackson S., Shepherd J.E. (2003).
Analytical Model for the Impulse of Single-Cycle Pulse Detonation Tube. Journal of Propulsion and Power, Vol. 19, No. 1, pp. 22-38.
Wintenberger E. (2004). Application of Steady and Unsteady Detonation Waves to
Propulsion. Doctoral Dissertation, California Institute of Technology. Wintenberger, E. and Shepherd. J.E. (2006). Model for the Performance of Air-
Breathing Pulse Detonation Engines. Journal of Propulsion and Power, Vol. 22, No. 3, pp. 593-603.
Woodward P. and Colella P. (1984). The Numerical Simulation of Two-Dimensional
Fluid Flow with Strong Shocks. Journal of Computational Physics, Vol. 54, pp. 115-173.
Wu Y., Ma F., and Yang V. (2003). System Performance and Thermodynamic Cycle
Analysis of Airbreathing Pulse Detonation Engines. Journal of Propulsion and Power, Vol. 19, No. 4, pp. 556-567.
Yungster S. and Radhakrishnan K. (1996). A Fully Implicit Time Accurate Method
for Hypersonic Combustion: Application to Shock-Induced Combustion Instability. Shock Waves, Vol. 5, pp. 293-303.
Yungster S. and Radhakrishnan K. (1997). Computational Study of Reacting Flow
Establishment in Expansion Tube Facilites. Shock Waves, Vol. 7, pp. 335-342. Yungster S. (2003). Analysis of Nozzle and Ejector Effects on Pulse Detonation
Engine Performance. 41st AIAA Aerospace Sciences Meeting & Exhibit, Reno, NV, Jan. 6-9, AIAA 2003-1316.
Yungster S. and Radhakrishnan K. (2004). Pulsating One-Dimensional Detonations in
Hydrogen-Air Mixtures. Combustion Theory and Modeling, Vol. 8, pp. 745-770.
Zel’dovich Y.B. (1940). On the Theory of the Propagation of Detonations in Gaseous
Systems. Journal of Experimental and Theoretical Physics, Vol. 10, pp. 542-568. Available in Translation as NACA TM 1261 (1950)

193
Zitoun R., Gamezo Z., Guerraud C. and Desbordes D. (1997). Experimental Study on the Propulsive Efficiency of Pulsed Detonation. 21st International Symposium on Shock Waves, Great Keppel Island, Australia, July 20-25.
Zucrow M.J. and Hoffman J.D. (1976). Gas Dynamics. John Wiley & Sons, Inc.


















