![Consensus Problems in Networks of Agents with …murray/preprints/om04-tac.pdf · Consensus Problems in Networks of Agents with Switching Topology and Time-Delays ... [19,4, 14].](https://static.fdocuments.net/doc/165x107/5b729a1f7f8b9a467a8ce5e8/consensus-problems-in-networks-of-agents-with-murraypreprintsom04-tacpdf.jpg)
Consensus of Multi-Agent Systems With Diverse Input and Communication Delays
7
2122 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 9, OCTOBER 2008 [2] D. Wang and N. H. McClamroch, “Stability analysis of the equilibrium of a constrained mechanical system,” Int. J. Control, vol. 60, no. 5, pp. 733–746, 1994. [3] D. Wang, Y. C. Soh, Y. K. Ho, and P. C. Muller, “Global stabilization for constrained robot motions with constraint uncertainties,” Robotica, vol. 16, no. 2, pp. 171–179, Mar. 1998. [4] Y. Zhao and C. C. Cheah, “Hybrid vision-force control for robot with uncertainties,” in Proc. IEEE 2004 Int. Conf. Robot. Automat., 2004, pp. 261–266. [5] C. C. Cheah, S. Kawamura, and S. Arimoto, “Stability of hybrid posi- tion and force control for robotic kinematics and dynamics uncertain- ties,” Automatica, vol. 39, pp. 847–855, 2003. [6] D. Xiao, B. Ghosh, N. Xi, and T. Tarn, “Sensor-based hybrid position/ force control of a robot manipulator in an uncalibrated environment,” IEEE Trans. Control Syst. Technol., vol. 8, no. 4, pp. 635–645, Jul. 2000. [7] T. Yoshikawa and A. Sudou, “Dynamic hybrid position/force control of robot manipulators—on-line estimation of unknown constraint,” IEEE Trans. Robot. Automat., vol. 9, no. 2, pp. 220–226, Apr. 1993. [8] M. Namvar and F. Aghili, “Adaptive force-motion control of coordi- nated robot interacting with geometrically unknown environments,” IEEE Trans. Robot. Automat., vol. 21, no. 4, pp. 678–694, Aug. 2005. [9] S. Chiaverini and L. Sciavicco, “Force/position regulation of compliant robot manipulators,” IEEE Trans. Robot. Automat., vol. 9, no. 4, pp. 361–373, Aug. 1993. [10] M. H. Raibert and J. J. Craig, “Hybrid position/force control of manip- ulators,” ASME J. Syst,, Meas., Control, vol. 103, pp. 126–133, 1981. [11] L. Villani, C. Natale, B. Siciliano, and C. C. de Wit, “An experiment study of adaptive force/position control algorithms for an industrial robot,” IEEE Trans. Contr. Syst. Technol., vol. 8, no. 5, pp. 777–786, Sep. 2000. [12] S. Jung, T. Hsia, and R. Bonitz, “Force tracking impedance control of robot manipulators under unknown environment,” IEEE Trans. Contr. Syst. Technol., vol. 12, no. 3, pp. 474–483, May 2004. [13] Y. Karayiannidis, G. Rovithakis, and Z. Doulgeri, “Force/position tracking for a robotic manipulator in compliant contact with a sur- face using neuro-adaptive control,” Automatica, vol. 43, no. 7, pp. 1281–1288, 2007. [14] Z. Doulgeri and Y. Karayiannidis, “Performance analysis of a soft tip robotic finger controlled by a parallel force/position regulator under kinematic uncertainties,” IET Control Theory Appl., vol. 1, no. 1, pp. 273–280, 2007. [15] Z. Doulgeri and Y. Karayiannidis, “Force position control for a robot finger with a soft tip and kinematic uncertainties,” Robot. Auton. Syst., vol. 55, no. 4, pp. 328–336, 2007. [16] Z. Doulgeri and S. Arimoto, “A position/force control for a robot finger with soft tip and uncertain kinematics,” J. Robot. Syst., vol. 19, no. 3, pp. 115–131, 2002. [17] H. Khalil, Nonlinear Systems, 3rd ed. Englewood Cliffs, NJ: Prentice Hall, 2002. [18] C. Desoer and M. Vidyasagar, Feedback Systems: Input–Output Prop- erties. New York: Academic, 1975. Consensus of Multi-Agent Systems With Diverse Input and Communication Delays Yu-Ping Tian and Cheng-Lin Liu Abstract—The consensus problem for multi-agent systems with input and communication delays is studied based on the frequency-domain analysis. Two decentralized consensus conditions are obtained, one of which is given for the systems based on undirected graphs with diverse input delays and the other is for the systems based on directed graphs with diverse communication delays and input delays. For the systems with both communication delays and input delays, the consensus condition is dependent on input delays but independent of communication delays. Index Terms—Communication delays, consensus, group cooperation, input delays, multi-agent system. I. INTRODUCTION Motivated by diverse research topics, such as coordination, flocking and formation of groups of mobile autonomous agents, the consensus problem for multi-agent systems has attracted more and more atten- tion recently. Vicsek et al. proposed a discrete-time model of multi-au- tonomous agents, and demonstrated that without any central control all the agents move in the same direction when the density is large and the noise is small [12]. Jadbabaie et al. studied the linearized Vicsek’s model and proved that all the agents converge to a common steady state provided that the interconnection graph is jointly connected [5]. It is very important to study the delay effect on convergence of con- sensus protocols. Basically, there are two kinds of delays in multi-agent systems. One is related to communication from one agent to another, which will be called communication delay in this note. The other is re- lated to processing and connecting time for the packets arriving at each agent, which will be called input delay. Input delays also occur when actuators and controllers are connected by networks. For systems with communication delays, each agent gets delayed state information from its neighbors. Note that when a constant-con- sensus is achieved, the states of all the agents in the system share the same value at any time. So, in most consensus protocols each agent compares the delayed states of its neighbors with its own current state instead of a delayed one. Recently, these kinds of consensus protocols have been studied for fixed or even switched graphs by using different analysis methods, such as the contraction analysis method [13], the pas- sivity-based method [4], the method based on delayed and hierarchical graphs [3], among others. It should be pointed out that the study on the consensus problem with communication delays started as early as in 1980s in the context of distributed computation [1], [10]. In some other communities such as physics, this problem has also been extensively studied as synchronization of coupled oscillators (see, e.g., [8]). How- ever, current studies in the context of multi-agent systems pay more attention to interconnection topology graphs. Manuscript received April 24, 2007; revised June 4, 2008. Current version published October 8, 2008. This work was supported by the National Natural Science Foundation of China under Grant 60425308, National “863” Pro- gramme of China under Grant 2006AA04Z263, and by the Natural Science Foundation of Jiangsu Province of China under Grant BK2006097. Recom- mended by Associate Editor F. Bullo. The authors are with the School of Automation, Southeast University, Nan- jing 210096, China (e-mail: [email protected]). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TAC.2008.930184 0018-9286/$25.00 © 2008 IEEE
Transcript of Consensus of Multi-Agent Systems With Diverse Input and Communication Delays

2122 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 9, OCTOBER 2008
[2] D. Wang and N. H. McClamroch, “Stability analysis of the equilibriumof a constrained mechanical system,” Int. J. Control, vol. 60, no. 5, pp.733–746, 1994.
[3] D. Wang, Y. C. Soh, Y. K. Ho, and P. C. Muller, “Global stabilizationfor constrained robot motions with constraint uncertainties,” Robotica,vol. 16, no. 2, pp. 171–179, Mar. 1998.
[4] Y. Zhao and C. C. Cheah, “Hybrid vision-force control for robot withuncertainties,” in Proc. IEEE 2004 Int. Conf. Robot. Automat., 2004,pp. 261–266.
[5] C. C. Cheah, S. Kawamura, and S. Arimoto, “Stability of hybrid posi-tion and force control for robotic kinematics and dynamics uncertain-ties,” Automatica, vol. 39, pp. 847–855, 2003.
[6] D. Xiao, B. Ghosh, N. Xi, and T. Tarn, “Sensor-based hybrid position/force control of a robot manipulator in an uncalibrated environment,”IEEE Trans. Control Syst. Technol., vol. 8, no. 4, pp. 635–645, Jul. 2000.
[7] T. Yoshikawa and A. Sudou, “Dynamic hybrid position/force control ofrobot manipulators—on-line estimation of unknown constraint,” IEEETrans. Robot. Automat., vol. 9, no. 2, pp. 220–226, Apr. 1993.
[8] M. Namvar and F. Aghili, “Adaptive force-motion control of coordi-nated robot interacting with geometrically unknown environments,”IEEE Trans. Robot. Automat., vol. 21, no. 4, pp. 678–694, Aug. 2005.
[9] S. Chiaverini and L. Sciavicco, “Force/position regulation of compliantrobot manipulators,” IEEE Trans. Robot. Automat., vol. 9, no. 4, pp.361–373, Aug. 1993.
[10] M. H. Raibert and J. J. Craig, “Hybrid position/force control of manip-ulators,” ASME J. Syst,, Meas., Control, vol. 103, pp. 126–133, 1981.
[11] L. Villani, C. Natale, B. Siciliano, and C. C. de Wit, “An experimentstudy of adaptive force/position control algorithms for an industrialrobot,” IEEE Trans. Contr. Syst. Technol., vol. 8, no. 5, pp. 777–786,Sep. 2000.
[12] S. Jung, T. Hsia, and R. Bonitz, “Force tracking impedance control ofrobot manipulators under unknown environment,” IEEE Trans. Contr.Syst. Technol., vol. 12, no. 3, pp. 474–483, May 2004.
[13] Y. Karayiannidis, G. Rovithakis, and Z. Doulgeri, “Force/positiontracking for a robotic manipulator in compliant contact with a sur-face using neuro-adaptive control,” Automatica, vol. 43, no. 7, pp.1281–1288, 2007.
[14] Z. Doulgeri and Y. Karayiannidis, “Performance analysis of a soft tiprobotic finger controlled by a parallel force/position regulator underkinematic uncertainties,” IET Control Theory Appl., vol. 1, no. 1, pp.273–280, 2007.
[15] Z. Doulgeri and Y. Karayiannidis, “Force position control for a robotfinger with a soft tip and kinematic uncertainties,” Robot. Auton. Syst.,vol. 55, no. 4, pp. 328–336, 2007.
[16] Z. Doulgeri and S. Arimoto, “A position/force control for a robot fingerwith soft tip and uncertain kinematics,” J. Robot. Syst., vol. 19, no. 3,pp. 115–131, 2002.
[17] H. Khalil, Nonlinear Systems, 3rd ed. Englewood Cliffs, NJ: PrenticeHall, 2002.
[18] C. Desoer and M. Vidyasagar, Feedback Systems: Input–Output Prop-erties. New York: Academic, 1975.
Consensus of Multi-Agent Systems With DiverseInput and Communication Delays
Yu-Ping Tian and Cheng-Lin Liu
Abstract—The consensus problem for multi-agent systems with inputand communication delays is studied based on the frequency-domainanalysis. Two decentralized consensus conditions are obtained, one ofwhich is given for the systems based on undirected graphs with diverseinput delays and the other is for the systems based on directed graphswith diverse communication delays and input delays. For the systems withboth communication delays and input delays, the consensus condition isdependent on input delays but independent of communication delays.
Index Terms—Communication delays, consensus, group cooperation,input delays, multi-agent system.
I. INTRODUCTION
Motivated by diverse research topics, such as coordination, flockingand formation of groups of mobile autonomous agents, the consensusproblem for multi-agent systems has attracted more and more atten-tion recently. Vicsek et al. proposed a discrete-time model of multi-au-tonomous agents, and demonstrated that without any central control allthe agents move in the same direction when the density is large andthe noise is small [12]. Jadbabaie et al. studied the linearized Vicsek’smodel and proved that all the agents converge to a common steady stateprovided that the interconnection graph is jointly connected [5].
It is very important to study the delay effect on convergence of con-sensus protocols. Basically, there are two kinds of delays in multi-agentsystems. One is related to communication from one agent to another,which will be called communication delay in this note. The other is re-lated to processing and connecting time for the packets arriving at eachagent, which will be called input delay. Input delays also occur whenactuators and controllers are connected by networks.
For systems with communication delays, each agent gets delayedstate information from its neighbors. Note that when a constant-con-sensus is achieved, the states of all the agents in the system share thesame value at any time. So, in most consensus protocols each agentcompares the delayed states of its neighbors with its own current stateinstead of a delayed one. Recently, these kinds of consensus protocolshave been studied for fixed or even switched graphs by using differentanalysis methods, such as the contraction analysis method [13], the pas-sivity-based method [4], the method based on delayed and hierarchicalgraphs [3], among others. It should be pointed out that the study on theconsensus problem with communication delays started as early as in1980s in the context of distributed computation [1], [10]. In some othercommunities such as physics, this problem has also been extensivelystudied as synchronization of coupled oscillators (see, e.g., [8]). How-ever, current studies in the context of multi-agent systems pay moreattention to interconnection topology graphs.
Manuscript received April 24, 2007; revised June 4, 2008. Current versionpublished October 8, 2008. This work was supported by the National NaturalScience Foundation of China under Grant 60425308, National “863” Pro-gramme of China under Grant 2006AA04Z263, and by the Natural ScienceFoundation of Jiangsu Province of China under Grant BK2006097. Recom-mended by Associate Editor F. Bullo.
The authors are with the School of Automation, Southeast University, Nan-jing 210096, China (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TAC.2008.930184
0018-9286/$25.00 © 2008 IEEE

IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 9, OCTOBER 2008 2123
A common point of the above mentioned results is that when cer-tain connectedness condition is satisfied by the topology graph, theconsensus condition required on the coupling weights is independentof communication delays. Unfortunately, simulations show that sucha good property does not apply to the case of input delay. Althoughinput delay problems have been extensively studied in classic controltheory, there are few reports on the consensus problem with input delaysup to now, to our knowledge. Saber and Murray proposed a consensusprotocol in which each agent delays its own measurement of state in thesame number as the communication delay so that it could be matchedwith the delayed states of its neighbors [7]. Actually, the delays intro-duced by agents for themselves in this protocol can be also considered asinput delays. However, only the case of identical delay is considered in[7] and their analysis method does not apply to the case of diverse delays.
In this note, we first consider the consensus problem for systems withdiverse input delays based on undirected graphs. Using some early re-sults obtained for the congestion control [9], we get a decentralizedconsensus condition, which uses only local information of each agent.This is a delay-dependent condition, according to which one should usesmall interconnection weights or have small numbers of neighbors toachieve consensus under large input delays. Then, we consider the con-sensus problem for systems with both diverse communication delaysand diverse input delays based on directed graphs (digraphs). Althoughthe consensus condition obtained for this case is more conservative thanthat for the first case due to the absence of system symmetry, it is still indecentralized way, and moreover, it is applicable to the systems basedon digraphs with asymmetric weights. The obtained consensus condi-tion is dependent on input delays but independent of communicationdelays when the digraph contains a globally reachable node.
II. PROBLEM FORMULATION AND PRELIMINARIES
The notation used in this note for graph theory is quite standard. Aweighted digraph G = (V;E;A) consists of a set of vertices V =fv1; . . . ; vng, a set of edges E � V � V and a weighted adjacencymatrix A = [aij ] 2 Rn�n. The node indexes belong to a finite indexset I = f1; . . . ; ng. We assume that the adjacency elements associatedwith the edges of the digraph are positive, i.e., aij > 0 , eij 2 E.Moreover, we assume aii = 0 for all i 2 I . The set of neighbors ofnode vi is denoted by Ni = fvj 2 V : (vi; vj) 2 Eg. For the digraphG, the out-degree of node i is defined as degout(vi) =
n
j=1aij . Let
D be the degree matrix ofG, which is defined as a diagonal matrix withthe out-degree of each node along its diagonal. The Laplacian matrixof the weighted digraph is defined as L = D � A.
A node vi in the digraphG is said to be reachable from another nodevj if there is a path in G from vj to vi. A node in the digraph is saidto be globally reachable if it is reachable from every other node in thedigraph. For an undirected graph, if it contains a globally reachablenode then every two of its nodes are reachable from each other. In thatcase we simply say the undirected graph is connected.
In a multi-agent system, each agent can be considered as a node ina digraph, and the information flow between two agents can be re-garded as a directed path between the nodes. Thus, the interconnec-tion topology in a multi-agent system can be described by a digraphG = (V;E;A).
Consider a discrete-time model of a network with integrator agents
xi(k + 1) = xi(k) + ui(k); i 2 I (1)
where xi 2 R and ui 2 R denote the state and the control input ofagent i, respectively. The following consensus protocol for the multi-agent system (1) has been extensively studied in the literature
ui(k) =v 2N
aij(xj(k)� xi(k)) (2)
whereNi denotes the neighbors of agent i, and aij > 0 is the adjacencyelement of A in the digraph G = (V;E;A).
When each agent is subject to an input delayDi, system (1) becomes
xi(k + 1) = xi(k) + ui(k �Di); i 2 I: (3)
Under diverse communication delays, the consensus protocol becomes
ui(k) =v 2N
aij(xj(k � Tij)� xi(k)) (4)
where Tij represents the communication delay from agent j to agent i.Under protocol (4), multi-agent system (3) is said to achieve a con-
sensus asymptotically if
limk!1
xi(k) = c; 8 i 2 I
where c is a constant.The closed-loop system of (3) and (4) is
xi(k + 1) = xi(k)+
v 2N
aij(xj(k � Tij �Di) � xi(k �Di)); i 2 I: (5)
Let x(k) = [x1(k); . . . ; xn(k)]T , and
dm1 =Tij +Di; m1 = 1; . . . ; n2;
dm2 =Di; m2 = n2 + 1; . . . ; n(n+ 1):
Then, (5) can be rewritten as a time-delayed system in a vector form
x(k + 1) = x(k) +
n
i=1
Aix(k � di) (6)
where Ai 2 Rn�n, and nd = n(n + 1). Obviously, n
i=1Ai = L,
which is the Laplacian matrix of the topology graph.The characteristic equation of system (6) is given by
det (z � 1)I �
n
i=1
Aiz�d = 0: (7)
The equilibrium set of system (6) is define by
Xe = fx 2 Rn : Lx = 0g:
When L is singular, Xe is a continuum of equilibrium points. Assumethe interconnection topology of the system is described by a connectedundirected graph or a digraph containing a globally reachable node.Then the Laplacian matrix L has a simple eigenvalue 0, i.e., det(L) =0 and rank(L) = n� 1 (see, e.g., [6]). By the definition of L we haveL[1; . . . ; 1]T = 0. and all the elements in Xe can be represented asc[1; . . . ; 1]T where c is any constant. Therefore, system (6) achievesa consensus asymptotically, if the solution of the system starting fromany given initial states x(�k) 2 Rn, k = 0; 1; . . . ; nd � 1, asymp-totically converges to an element in Xe. According to this analysis thefollowing lemma can be easily proved.
Lemma 1: If the roots of (7) have modulus less than unity exceptfor a root at z = 1, then system (6) with a connected undirected graphor a digraph containing a globally reachable node achieves a consensusasymptotically.
Some other lemmas are needed in the proof of our main results.Lemma 2: The following inequality:
sin 2D+1
2!
sin !
2
� 2D + 1 (8)
holds for all nonnegative integers D and all ! 2 [��; �].

2124 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 9, OCTOBER 2008
Proof: First of all, we claim that
sin�
2(2D + 1)�
1
2D + 1(9)
holds for any nonnegative integer D. Indeed, by denotingx = (1=(2D+ 1)), we have x 2 (0; 1] for any nonnegativeinteger D. Thus, inequality (9) is equivalent to the well-known in-equality sin((�=2)x) � x, where x 2 (0; 1].
Now, we note that lim!!0(sin((2D+ 1=2)!)=sin((!=2))) =(2D + 1). We just need to prove (8) for all ! 2 (0; �] because theleft-hand side of (8) is an even function for ! 2 [��; �].
When ! 2 (0; (�=2D+ 1)], let h(!) = sin(((2D+ 1)=2)!) �(2D+1) sin(!=2). Calculating the derivative of h(!) with respect to! yields _h(!) = ((2D+ 1)=2)(cos(((2D+ 1)=2)!)�cos((!=2))).Obviously, we have _h(!) � 0, i.e., h(!) is not increasingfor all ! 2 (0; (�=(2D+ 1))]. Since h(0) = 0, we haveh(!) � 0, i.e., sin(((2D+ 1)=2)!) � (2D + 1) sin(!=2)for all ! 2 (0; (�=(2D+ 1))]. Since sin(!=2) > 0, we get(sin(((2D+ 1)=2)!)=sin((!=2))� (2D + 1).
When ! 2 ((�=(2D+ 1)); �], we have sin(!=2) >sin(�=2(2D+ 1)) > 0 for all nonnegative integers D. So, from (9),we get
sin (2D+1)2
!
sin !2
�1
sin !2
<1
sin �2(2D+1)
� 2D + 1
for all ! 2 ((�=(2D+ 1)); �] and all nonnegative integersD. Lemma2 is proved.
Lemma 3 ([11]): Let Q = Q� > 0 and T = diag(ti; ti 2 C) begiven. Then
�(TQ) 2 �(Q)Co(0 [ ftig)
where �(�) denotes the matrix spectral radius, and Co(�) convex hull.Lemma 4 ([9]): Given any real number 0 � � < 1 and natural
number m � 2. Then, the scaled convex hull �Co(0 [ fGi(!); i =1; . . . ;mg) does not contain the point (�1; j0) for all ! 2 [��; �],where
Gi(!) = kie�jD !
ej! � 1;
ki =2 sin�
2(2Di + 1)
and Di, i = 1; . . . ;m, are nonnegative integers.
III. CONSENSUS WITH INPUT DELAYS
In this section we consider the consensus problem for multi-agentsystems with input delays only. The closed-loop form of the time-de-layed multi-agent system (3) with consensus protocol (2) is
xi(k+1)= xi(k)+v 2N
aij(xj(k�Di)�xi(k�Di)); i 2 I:(10)
Theorem 1: Assume system (10) of n agents is based on an undi-rected and connected graph G = (V; E;A) with symmetric weights.System (10) achieves a consensus asymptotically if
v 2N
aij < sin�
2(2Di + 1); 8 i 2 I: (11)
Proof: Taking the z-transformation of system (10) and writing itin vector form, we get
(z � 1)X(z) = �diagfz�D ; i = 1; . . . ; ngLX(z): (12)
Note thatL in (12) is a positively semi-definite matrix since undirectedgraph is considered. The characteristic equation is
det((z � 1)I + diagfz�D ; i = 1; . . . ; ngL) = 0: (13)
Define p(z) = det((z � 1)I + diagfz�D ; i = 1; . . . ; ngL). Then,we will prove that all the zeros of p(z) have modulus less than unityexcept for a zero at z = 1.
Let z = 1, then p(1) = det(L). Since G = (V;E;A) is connected,0 is a simple eigenvalue of L, i.e., det(L) = 0 and rank(L) = n � 1(see, e.g., [6]). Thus, p(z) indeed has a simple zero at z = 1.
Now, we prove that the zeros of det(I+diagf(z�D =(z � 1)); i =1; . . . ; ngL) have modulus less than unity. By the general Nyquist sta-bility criterion, this is the case if the eigenloci of
F (j!) = diage�j!D
ej! � 1; i = 1; . . . ; n L
does not enclose the point (�1; j0) for all ! 2 [��; �]. To show thiswe rewrite F (j!) as
F (j!) = diag kie�j!D
ej! � 1diag k�1
i L
where ki = 2 sin(�=(2(2Di+ 1))). Now, using Lemma 3 we have
� diag kie�j!D
ej! � 1diag k�1
i L
= � diag kie�j!D
ej! � 1diag k
�(1=2)i
Ldiag k�(1=2)i
2 � diag k�(1=2)i Ldiag k
�(1=2)i
Co 0 [ diag kie�j!D
ej! � 1:
Since the spectral radius of any matrix is bounded by its maximumabsolute row sum, it follows from the condition (11) that
� diag k�(1=2)i Ldiag k
�(1=2)i < 1:
Now, from Lemma 4 we conclude that eigenloci of F (j!) does notenclose the point (�1; j0) for all ! 2 [��; �], which implies that thezeros of p(z) have modulus less than unity except for a zero at z = 1.Theorem 1 is thus proved by Lemma 1.
Remark 1: Theorem 1 gives a decentralized consensus condition formulti-agent systems with diverse input delays, which uses only localinformation of each agent. The result can be extended to the contin-uous-time system with input delays given by
_xi(t) =v 2N
aij(xj(t�Di)� xi(t�Di)); i 2 I: (14)
If the topology graph of the system is undirected and connected withsymmetric weights, then through a similar way shown in the proof ofTheorem 1 one can get a consensus condition as
Di
v 2N
aij <�
4; 8 i 2 I: (15)

IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 9, OCTOBER 2008 2125
It is easy to see that in the case when all the delays Di are the same,the condition (15) reduces to the result given by [7, (44)].
In [12], Vicsek et al. studied a group of agents moving in the planewith the same line velocity. When the heading of the agents are close toeach other, the local updating rule for the headings given in [12], knownas Vicsek’s model, may be approximated by the following linearizedequation [5]
xi(k + 1) = xi(k) +1
1 + niv 2N
(xj(k)� xi(k)); i 2 I (16)
with xi 2 R and where ni denotes the number of the neighbors ofagent i. In this note we study a modified linearized Vicsek’s modelwith input delays
xi(k + 1) = xi(k)+"i
1 + niv 2N
(xj(k �Di)�xi(k�Di)); i 2 I (17)
where "i > 0 is an adjustable interconnection gain. From Theorem 1,we get the following corollary.
Corollary 1: Assume system (17) of n agents is based on an undi-rected and connected graph. System (17) achieves a consensus asymp-totically if
ni"i1 + ni
< sin�
2(2Di + 1); 8 i 2 I: (18)
Remark 2: It is easy to check that when Di � 1, inequality (18)holds only for "i < 1. So, the introduction of small "i is necessaryfor enhancing the robustness of the linearized Vicsek’s model againstinput delays.
Remark 3: Corollary 1 clearly shows the relationship among inputdelays, interconnection weights and number of neighbors: for largeinput delays one should use small interconnection weights or havesmall numbers of neighbors when the graph is kept connected.
IV. CONSENSUS UNDER COMMUNICATION
DELAYS AND INPUT DELAYS
In this section we consider multi-agent systems with both communi-cation delays and input delays. Unlike the input delays, the diversity ofcommunication delays destroys the symmetry of the system even if thegraph is undirected with symmetric weights. This implies that the toolsused for Theorem 1 (Lemma 3 and Lemma 4) are no longer applicable.So, in our following analysis we will use Greshgorin’s disk theorem toestimate matrix eigenvalues, which does not need symmetry. And theinterconnection topology studied in this section can be a digraph withasymmetric weights.
Theorem 2: Consider multi-agent system (3) with protocol (4). As-sume that the interconnection topology digraph G = (V;E;A) of thesystem has a globally reachable node. Then the system achieves a con-sensus asymptotically if
v 2N
aij <1
2Di + 1; 8 i 2 I: (19)
Proof: The closed-loop system of (3) with (4) is given by (5).Taking the z-transformation of the system (5), we get
zXi(z) = Xi(z)
+v 2N
aij(Xj(z)z�T �D �Xi(z)z
�D ); i 2 I (20)
where Xi(z) is the z-transformation of xi(k). Define a n � n matrix~L(z) = f~lij(z)g as follows:
~lij(z) =
�aijz�T �D ; vj 2 Ni;
v 2aij z�D ; j = i;
0; otherwise.
and ~L(1) = L, which is the Laplacian matrix. Then, (20) canbe written as zX(z) = X(z) � ~L(z)X(z); where X(z) =[X1(z); . . . ; Xn(z)]
T . Define p(z) = det((z � 1)I + ~L(z)). Then,we will prove that all the zeros of p(z) have modulus less than unityexcept for a zero at z = 1 in the following.
Let z = 1, p(1) = det(~L(1)) = det(L). Since G = (V;E;A) hasa globally reachable node, 0 is a simple eigenvalue ofL, i.e., det(L) =0 and rank(L) = n�1 (see, e.g., [6]). Thus, p(z) indeed has a simplezero at z = 1.
Now, we prove that the zeros of f(z) = det(I + (1=(z � 1))~L(z))have modulus less than unity. Based on the general Nyquist stabilitycriterion, the zeros of f(z) have modulus less than unity, if the eigen-loci of (1=(ej! � 1))~L(ej!), i.e., �((1=(ej! � 1))~L(ej!)), does notenclose the point (�1; j0) for ! 2 [��; �]. By Greshgorin’s disktheorem, we have �((1=(ej! � 1))~L(ej!)) 2
i2IDi for all ! 2
[��; �], where
Di = � : � 2 C; � �v 2N
aije�j!D
ej! � 1
�v 2N
aije�j!(T +D )
ej! � 1:
Further, we can show that
Di = � : � 2 C; � �Ki
e�j!D
ej! � 1� Ki
e�j!D
ej! � 1
where Ki =v 2N
aij . Now, define
Gi(!) =Ki
e�j!D
ej! � 1
=�Ki
sin 2D +12
!
2 sin !
2
� jKi
cos(2D +12
!)
2 sin !
2
: (21)
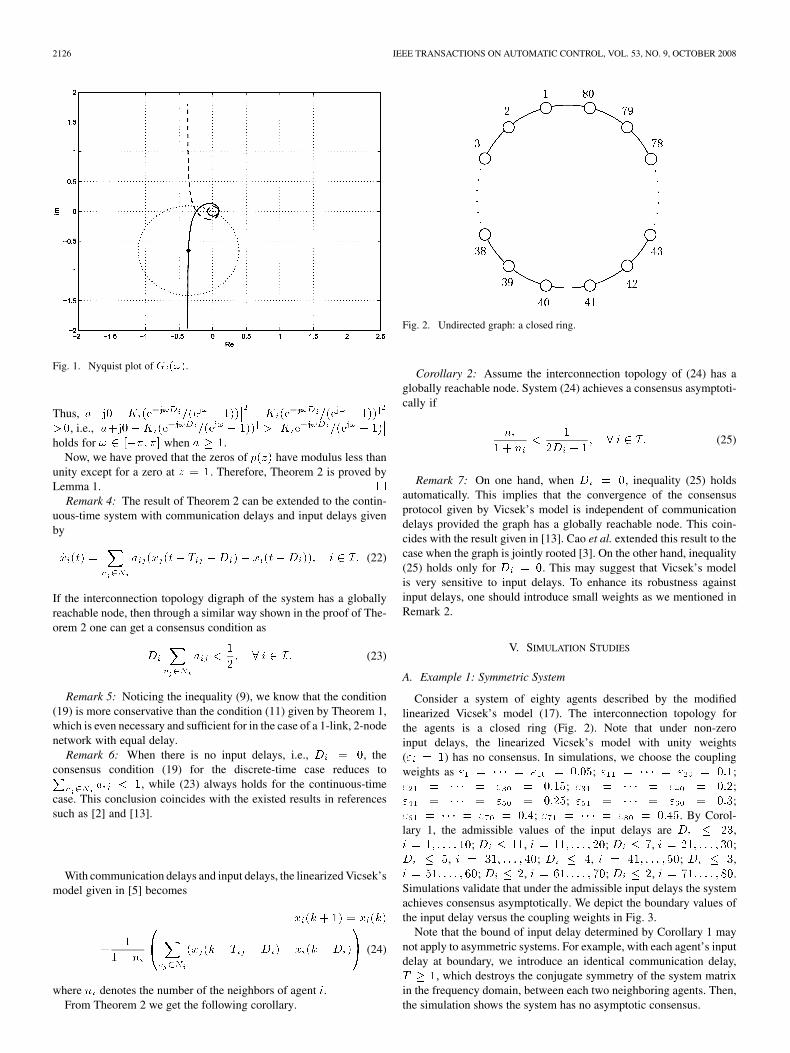
The Nyquist plot of Gi(!) for ! 2 [��; �] is illustratedin Fig. 1. Note that Gi(!) is just the center of the disc� : � 2 C; ��Ki e�j!D =(ej!�1) � Ki e�j!D =(ej! �1) .
So, �((1=(ej! � 1))~L(ej!)) does not enclose the point (�1; j0) for all! 2 [��; �] as long as the point (�a; j0) with a � 1 is not in the disc� : � 2 C; ��Ki e�j!D = (ej!�1) � Ki e�j!D =(ej!�1)
for all ! 2 [��; �], i.e., �a+ j0�Ki e�j!D =(ej! � 1) >
Ki e�j!D =(ej! � 1) holds for all ! 2 [��; �] when a � 1.From (21), we have
�a+ j0�Ki
e�j!D
ej! � 1
2
� Ki
e�j!D
ej! � 1
2
=
a a�Ki
sin 2D +12
!
sin !
2
:
Because (sin(((2Di + 1)=2)!)=sin((!=2))) � 2Di + 1 holds for! 2 [��; �] by Lemma 2, it follows from (19) that
Ki
sin 2D +12
!
sin !
2
� Ki(2Di + 1) < 1 � a:
2126 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 9, OCTOBER 2008
Fig. 1. Nyquist plot of G (!).
Thus, a+j0�Ki(e�j!D =(ej! � 1))
2� Ki(e
�j!D =(ej! � 1))2
>0, i.e., a+j0�Ki(e�j!D =(ej! � 1)) > Kie
�j!D =(ej! � 1)holds for ! 2 [��; �] when a � 1.
Now, we have proved that the zeros of p(z) have modulus less thanunity except for a zero at z = 1. Therefore, Theorem 2 is proved byLemma 1.
Remark 4: The result of Theorem 2 can be extended to the contin-uous-time system with communication delays and input delays givenby
_xi(t) =v 2N
aij(xj(t� Tij �Di)� xi(t�Di)); i 2 I: (22)
If the interconnection topology digraph of the system has a globallyreachable node, then through a similar way shown in the proof of The-orem 2 one can get a consensus condition as
Di
v 2N
aij <1
2; 8 i 2 I: (23)
Remark 5: Noticing the inequality (9), we know that the condition(19) is more conservative than the condition (11) given by Theorem 1,which is even necessary and sufficient for in the case of a 1-link, 2-nodenetwork with equal delay.
Remark 6: When there is no input delays, i.e., Di = 0, theconsensus condition (19) for the discrete-time case reduces to
v 2Naij < 1, while (23) always holds for the continuous-time
case. This conclusion coincides with the existed results in referencessuch as [2] and [13].
With communication delays and input delays, the linearized Vicsek’smodel given in [5] becomes
xi(k + 1) = xi(k)
+1
1 + niv 2N
(xj(k � Tij �Di)� xi(k �Di) (24)
where ni denotes the number of the neighbors of agent i.From Theorem 2 we get the following corollary.
Fig. 2. Undirected graph: a closed ring.
Corollary 2: Assume the interconnection topology of (24) has aglobally reachable node. System (24) achieves a consensus asymptoti-cally if
ni1 + ni
<1
2Di + 1; 8 i 2 I: (25)
Remark 7: On one hand, when Di = 0, inequality (25) holdsautomatically. This implies that the convergence of the consensusprotocol given by Vicsek’s model is independent of communicationdelays provided the graph has a globally reachable node. This coin-cides with the result given in [13]. Cao et al. extended this result to thecase when the graph is jointly rooted [3]. On the other hand, inequality(25) holds only for Di = 0. This may suggest that Vicsek’s modelis very sensitive to input delays. To enhance its robustness againstinput delays, one should introduce small weights as we mentioned inRemark 2.
V. SIMULATION STUDIES
A. Example 1: Symmetric System
Consider a system of eighty agents described by the modifiedlinearized Vicsek’s model (17). The interconnection topology forthe agents is a closed ring (Fig. 2). Note that under non-zeroinput delays, the linearized Vicsek’s model with unity weights("i = 1) has no consensus. In simulations, we choose the couplingweights as "1 = � � � = "10 = 0:05; "11 = � � � = "20 = 0:1;"21 = � � � = "30 = 0:15; "31 = � � � = "40 = 0:2;"41 = � � � = "50 = 0:25; "51 = � � � = "60 = 0:3;"61 = � � � = "70 = 0:4; "71 = � � � = "80 = 0:45. By Corol-lary 1, the admissible values of the input delays are Di � 23,i = 1; . . . ; 10; Di � 11, i = 11; . . . ; 20; Di � 7, i = 21; . . . ; 30;Di � 5, i = 31; . . . ; 40; Di � 4, i = 41; . . . ; 50; Di � 3,i = 51; . . . ; 60; Di � 2, i = 61; . . . ; 70; Di � 2, i = 71; . . . ; 80.Simulations validate that under the admissible input delays the systemachieves consensus asymptotically. We depict the boundary values ofthe input delay versus the coupling weights in Fig. 3.
Note that the bound of input delay determined by Corollary 1 maynot apply to asymmetric systems. For example, with each agent’s inputdelay at boundary, we introduce an identical communication delay,T � 1, which destroys the conjugate symmetry of the system matrixin the frequency domain, between each two neighboring agents. Then,the simulation shows the system has no asymptotic consensus.

IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 9, OCTOBER 2008 2127
Fig. 3. Bounds of input delays.
Fig. 4. Digraph of a group of six agents.
Now, we can use Theorem 2 to get a consensus condition for thesystem with both input delays and communication delays. By The-orem 2, the admissible values of the input delays are Di � 14, i =
1; . . . ; 10; Di � 6, i = 11; . . . ; 20; Di � 4, i = 21; . . . ; 30; Di � 3,i = 31; . . . ; 40; Di � 2, i = 41; . . . ; 50; Di � 1, i = 51; . . . ; 60;Di � 1, i = 61; . . . ; 70; Di � 1, i = 71; . . . ; 80. The boundaryvalues of input delays estimated by Theorem 2 is also shown in Fig. 3.The boundary determined by Theorem 2 is beneath the boundary givenby Corollary 1, which implies that Theorem 2 is more conservative thanCorollary 1 for symmetric systems. However, with input delays in thearea determined by Theorem 2, the asymptotic consensus of the systemis robust to arbitrary communication delays.
B. Example 2: Asymmetric System
Consider the multi-agent system (5) with an interconnection digraphshown by Fig. 4. The weights of the directed paths are: a12 = 0:1,a16 = 0:05, a23 = 0:15, a36 = 0:1, a43 = 0:05, a45 = 0:1, a56 =
0:15, a62 = 0:15, and the corresponding communication delays are:T12 = 5, T16 = 3, T23 = 4, T36 = 4, T43 = 4, T45 = 6, T56 = 6,T62 = 5. Simulation shows that the system is quite sensitive to inputdelays, and it cannot converge to any consensus when Di > 3. Thisis an asymmetric system to which Theorem 1 does not apply. UsingTheorem 2, we get that Di � 2 is a sufficient consensus conditionwhich is independent of communication delays. We choose Di = 2,i = 1; 2; 3; 4; 5; 6, in the simulation. The multi-agent system convergesto a consensus as shown by Fig. 5.
Fig. 5. Consensus with communication and input delays.
VI. CONCLUSION
In this note, we consider the consensus problem with diverse inputand communication delays. Two decentralized consensus conditionsare obtained. Both conditions are independent of communication de-lays. The first condition is given only for symmetric systems, while thesecond one can be used for systems with asymmetric directed topologyand/or diverse communication delays. For symmetric systems the con-dition of Theorem 2 is more conservative than that of Theorem 1. Weconjecture that there may still exist a consensus criterion depending oncommunication delay, which establishes a link between Theorem 1 andTheorem 2.
ACKNOWLEDGMENT
The authors wish to thank the anonymous reviewers for their valu-able comments that impelled them to significantly improve the qualityof this note.
REFERENCES
[1] D. P. Bertsekas and J. N. Tsitsiklis, “Comments on ’Coordination ofgroups of mobile autonomous agents using nearest neighbor rules,”IEEE Trans. Automatic Control, vol. 52, no. 5, pp. 968–969, May 2007.
[2] V. D. Blondel, J. M. Hendrickx, A. Olshevsky, and J. N. Tsitsiklis,“Convergence in multiagent coordination, consensus, and flocking,”in Proc. Joint 44th IEEE Conf. Decision Control Eur. Control Conf.,Seville, Spain, 2005, pp. 2996–3000.
[3] M. Cao, A. S. Morse, and B. D. O. Anderson, “Reaching an agreementusing delayed information,” in Proc. IEEE Conf. Decision Control, SanDiego, CA, 2006, pp. 3375–3380.
[4] N. Chopra and M. W. Spong, “Passivity-based control of multi-agentsystems,” in Advances in Robot Control: From Everyday Physics toMuman-Like Movements, S. Kawamura, M. Svinin, and Editors, Eds.Berlin, Germany: Spinger-Verlag, 2006, pp. 107–134.
[5] A. Jadbabaie, J. Lin, and A. S. Morse, “Coordination of groups of mo-bile autonomous agents using nearest nerghbor rules,” IEEE Trans. Au-tomat. Control, vol. 48, no. 6, pp. 988–1001, Jun. 2003.
[6] Z. Y. Lin, B. Francis, and M. Maggiore, “Necessary and sufficientgraphical conditions for formation control of unicycles,” IEEE Trans.Automat. Control, vol. 50, no. 1, pp. 121–127, Jan. 2005.
[7] R. O. Saber and R. M. Murray, “Consensus problems in networksof agents with switching topology and time-delays,” IEEE Trans.Automat. Control, vol. 49, no. 9, pp. 1520–1533, Sep. 2004.
[8] M. K. S. Yeung and S. H. Strogatz, “Time delay in the Kuramoto modelof coupled osillators,” Phys. Rev. Lett., vol. 82, pp. 648–651, 1999.

2128 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 9, OCTOBER 2008
[9] Y.-P. Tian and H.-Y. Yang, “Stability of the internet congestion controlwith diverse delays,” Automatica, vol. 40, pp. 1533–1541, 2004.
[10] J. N. Tsitsiklis, D. P. Bertsekas, and M. Athans, “Distributedasynchronous deterministic and stochastic gradient optimisationalgorithms,” IEEE Trans. Automatic Control, vol. AC-31, no. 9, pp.803–812, Sep. 1986.
[11] G. Vinnicombe, “On the Stability of End-to-End Congestion Controlfor the Internet,” Tech. Rep., 2000 [Online]. Available: http://www-control.eng.cam.ac.uk/gv/internet
[12] T. Vicsek, A. Czirok, E. B. Jacob, I. Cohen, and O. Schochet, “Noveltype of phase transitions in a system of self-driven particles,” Phys. Rev.Lett., vol. 75, pp. 1226–1229, 1995.
[13] W. Wang and J. J. E. Slotine, “Contraction analysis of time-delayedcommunications and group cooperation,” IEEE Trans. Automat. Con-trol, vol. 51, no. 4, pp. 712–717, Apr. 2006.
Stability of Solutions for Stochastic ImpulsiveSystems via Comparison Approach
Bin Liu
Abstract—This note studies stability problem of solutions for stochasticimpulsive systems. By employing Lyapunov-like function method and Itô’sformula, comparison principles of existence and uniqueness and stability ofsolutions for stochastic impulsive systems are established. Based on thesecomparison principles, the stability properties of stochastic impulsive sys-tems are derived by the corresponding stability properties of a determin-istic impulsive system. As the application, the stability results are used todesign impulsive control for the stabilization of unstable stochastic systems.Finally, one example is given to illustrate the obtained results.
Index Terms—Comparison principle, impulsive control, Itô’s formula,stability, stochastic impulsive system (SIS).
I. INTRODUCTION
There are many real world systems and natural processes whichdisplay some kind of dynamic behavior in a style of both continuousand discrete characteristics. For instance, many evolutionary pro-cesses, particularly some biological systems such as biological neuralnetworks and bursting rhythm models in pathology, as well as optimalcontrol models in economics, frequency-modulated signal processingsystems, and flying object motions, and the like, are characterized byabrupt changes of states at certain time instants. This is the familiarimpulsive phenomenon. Often, sudden and sharp changes occur in-stantaneously, in the form of impulses, which cannot be well describedby using pure continuous or pure discrete models. Moreover, it hasalso been noticed that many real world systems and natural processesmay be disturbed by stochastic factors. Therefore, stochastic impul-sive system (SIS) can be used as an appropriate description of thesephenomena of abrupt qualitative dynamical changes of essentially
Manuscript received December 20, 2005; revised March 6, 2008. Currentversion published October 8, 2008. This work was supported by NSFC-China(60874025) and ARC-Australia (DP0881391). Recommended by Associate Ed-itor I-J. Wang.
The author is with the Department of Information and Computation Sciences,Hunan University of Technology, Zhuzhou 412008, China, and also with theDepartment of Information Engineering, The Australian National University,Canberra ACT 0200, Australia (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TAC.2008.930185
continuous time systems which are disturbed by stochastic factorsand hence it arises naturally from a wide variety of applications. Forexample, consider species population in an ecological system (such asfish population in a pool, etc), by using the models in [1]–[3], [6], wecan formulate its dynamics as:
dx(t) = f(t; x+ x�)d(t) + �g(x)dB(t); t 2 (tk; tk+1];
�x(t) =x(t+k )� x(tk) = Ik(x(t)); t = tk; k 2 N; (1)
where initial condition x(t0) = x0 > 0; x� is the equilibria of system_x(t) = f(t; x), i.e., f(t; x�) = 0; _B(t) 2 Rm represents the whitenoise and � 2 Rn�m is the noise intensity matrix, and g(x) withg(0) = 0 is some function about species population x; �x(tk) meansthat there are sudden and sharp changes of the species population atsome instances tk; k 2 N . Equation (1) is a SIS. Under environmentalnoises and impulsive effects, how about the dynamical properties suchas stability of system (1)? With respect to the stochastic disturbances,many important results of stability for stochastic systems have beenestablished since Itô introduced his stochastic calculus about 50 yearsago, see [4]–[10] and references therein. With respect to impulsive ef-fects, significant progress has also been made in the theory of impulsivedifferential equations in recent years [11]–[18]. However, the theoryof SIS has not yet been fully developed. Although there are literaturesstudied the systems with Markovian jumping parameters (see [8]–[10]),few investigations have been carried out for SIS.
In this note, we aim to study the stability problem of solutions forSIS. We will establish the comparison principles which guarantee theexistence and uniqueness and stability (stability, asymptotic stability,and exponential stability) of solutions for this kind of systems. In theliterature, the existence and uniqueness of solution of dynamical sys-tems is often derived by using Picard-Lindelüf method. There are veryfew literatures reported for the existence and uniqueness of solutionby using comparison approach. One interesting result in this note isthat the existence and uniqueness of solution of SIS can be judged bya deterministic comparison system with known existence property ofsolution. Thus, the linear growth condition often required for the exis-tence and uniqueness of solution of stochastic systems is relaxed. An-other advantage for this kind of comparison principles is that the sta-bility properties of SIS can be derived by the corresponding stabilityproperties of a deterministic impulsive system. Thus, some stability re-sults for impulsive systems in the literature can be used to investigatethe stability properties of SIS. Moreover, the stability results are usedto design impulsive control for the stabilization of unstable stochasticsystems.
II. PRELIMINARIES
In the sequel, letRn denote the n-dimensional real space and for anyx 2 Rn, let kxk be the Euclidean vector norm. LetR+ = [0;+1) andN = f0; 1; 2; . . .g. Let �max(X)(�min(X)) be the maximum (min-imum) eigenvalue of matrix X . For any random variable �, let E(�) bethe expectation value of �. For � > 0, let S� = fx 2 Rn : kxk � �g,and for a random vector � 2 Rn, let S� = f� 2 Rn : E(k�k) � �g.A function ' : R+ ! R+ is of class-K (' 2 K) if it is con-tinuous, zero at zero and strictly increasing. Let K1 = f� 2K : limt!1 �(t) = +1g, K1 = f� 2 K : �(E(s))�E(�(s)); where random variable s � 0 and E(s) < +1g,K2 = f� 2 K : �(E(s))� E(�(s)); where random variable s �0 and E(s) < +1g, and K21 = f� 2 K: � 2 K1 ^ K2g. LetPC be the class of functions p : R+ ! R+, where p is continuouseverywhere except tk; k 2 N , at which p is left continuous and theright limit p(t+k ) exists.
0018-9286/$25.00 © 2008 IEEE