Conduction (2)
19
© 2005 The Board of Trustees of the University of Illinois All Rights Reserved ME 320: Introductory Heat Transfer Conduction Heat Transfer Investigation A B C L A k A A L B k B A L C k C A T 1 T 2 T 3 T 4 q x L A T 1 T 2 T 3 q x L C T 4 L B • • • • x
-
Upload
harun-kaya -
Category
Documents
-
view
17 -
download
3
Transcript of Conduction (2)

© 2005 The Board of Trustees of the University of Illinois All Rights Reserved
ME 320: Introductory Heat Transfer Conduction Heat Transfer Investigation
A B C
LA
kA ALB
kBALC
kC A
T1 T2 T3 T4qx
LA
T1
T2
T3qx
LC
T4
LB
•
•
•
•
x

ME 320: Heat Transfer Conduction Heat Transfer Investigation
I. Introduction If the temperature varies with location in some stationary medium—be it a solid or a fluid—then a “temperature gradient” is said to exist in that medium. Energy in transit due to such a temperature gradient is conduction heat transfer. The degree of temperature variation within a conducting medium is quantified using the mathematical tools of vector Calculus; in particular, the magnitude of the temperature gradient is found from the derivative of temperature with respect to distance, and the gradient points in the direction of steepest temperature increase. In this laboratory exercise, you will study conduction heat transfer in detail, exploring the relationship between heat flux and temperature gradient, geometrical effects, composite structures, and interfacial resistance. The mode of conduction heat transfer differs from radiation, where the heat transfer rate depends on the fourth-power temperature difference, and it differs from convection, where at least one heat-transfer medium is in motion. As you consider conduction heat transfer in this laboratory, you may find it useful to contrast conduction with the other modes of heat transfer. You may also find it useful to draw analogy between the conduction of heat and that of electricity. You should use this laboratory exercise to develop a feel for the physics of conduction heat transfer as well as a sense of its practical application. This mode of heat transfer is extremely important in industry, with applications in automotive systems, aerospace systems, chemical and materials processing, electronics cooling, space conditioning and environmental control, and medicine. In order to concentrate on the fundamentals of conduction, your experiments will be restricted to one-dimensional, steady state conditions, where the heat transfer occurs in only a single coordinate direction and is independent of time.
II. Background A. Fourier's Law The fundamental relation between the heat flux, "q
r, and the temperature gradient, T∇
r, for
conduction heat transfer in an isotropic medium* is Tk"q ∇−=
rr (1)
where k (W/(m.K)) is an important property of the material called the thermal conductivity. This relationship is based on observations, and as such we refer to it as “phenomenological;” it is named Fourier’s Law. Thoughtful inspection of Fourier’s Law can tell you a lot about conduction heat transfer. Namely, the conductive heat flux is a vector—it has a magnitude and direction. The magnitude of the conductive heat flux is proportional to the temperature gradient, and its direction is coincident with the temperature gradient. Since the temperature gradient is in the direction of maximum temperature change, the heat flux is in the direction of maximum temperature change; i.e., it is perpendicular to the isotherms. The * The words “isotropic medium” mean a material in which the properties have no directional dependence.

ME 320: Heat Transfer Conduction Heat Transfer Investigation
2
minus sign means the conduction heat flux is in the direction of decreasing temperature. Many good engineers regard Fourier’s law as defining the thermal conductivity; this is a healthy point of view that you may find useful. In Cartesian (x, y, z) and cylindrical (r, Φ, z) coordinates, Fourier's Law can be expressed Cartesian:
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
−=∇−=++=zTk
yTj
xTikTk"qk"qj"qi"q zyx
rr (2)
Cylindrical:
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+φ∂
∂+
∂∂
−=∇−=++= φφφ zTiT
r1i
rTikTk"qi"qi"qi"q zrzzrr
rrr (3)
B. The Heat Diffusion Equation The partial differential equation governing the temperature distribution in a stationary medium is called the heat diffusion equation (HDE). You can derive the HDE by performing an energy balance on an appropriate differential control volume (see ref. [1]). In general vector form, the result may be written as
tTcq"q p ∂
∂ρ=+•∇− &
rr (4)
or substituting for "q
r from Fourier's law
tTcqTk p ∂
∂ρ=+∇•∇ &
rr (5)
where q& is the energy generation rate per unit volume (W/m3) in the medium. Physically, this equation reflects an energy balance at any arbitrary point within the medium. It states that the net rate of conduction per unit volume to the point, plus the volumetric energy generation rate at the point, must equal the time rate of change of thermal energy per unit volume at that point. In Cartesian and cylindrical coordinates the heat diffusion equation is expressed as Cartesian:
tTcq
zTk
zyTk
yxTk
x p ∂∂
ρ=+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂ & (6)
Cylindrical:
tTcq
zTk
zTk
r1
rTkr
rr1
p2 ∂∂
ρ=+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛φ∂
∂φ∂
∂+⎟
⎠⎞
⎜⎝⎛
∂∂
∂∂ & (7)

ME 320: Heat Transfer Conduction Heat Transfer Investigation
3
Assuming this partial differential equation can be solved for the temperature distribution (say analytically or computationally), subject to well-posed boundary and initial conditions, the heat flux may be determined at any point in the medium by Fourier's Law. We will use this approach (i.e., the "standard approach") in the sections below for the cases of steady state heat conduction through plane and cylindrical walls. C. Steady, One-Dimensional Conduction in a Cartesian System Consider the situation shown below, where a cylinder of constant cross-sectional area has a high temperature T1 imposed on its left end and a lower temperature T2 on its right end*.
y
xz
x = 0 x = L
T
T 2
′ ′ q x
x
T 1
T= T 1 T= T 2
•
•
Assuming negligible heat loss from the cylinder periphery and that the x-coordinate is aligned with the cylinder axis, the heat transfer and temperature gradient will occur in the x-direction only (i.e., heat transfer is by one-dimensional conduction). For steady state conditions (∂T/∂t = 0) with no heat generation, the heat diffusion equation reduces to
0dx
"dqx = (8)
or
0dxdTk
dxd
=⎟⎠⎞
⎜⎝⎛ (9)
The first form states that under these conditions the heat flux, xq ′′ , is a constant, independent of x. If the thermal conductivity can be assumed to be constant, the second form reduces to
* What is important here is that the area perpendicular to the conductive flux is constant. Although a circular cylinder has been shown, the cross-sectional area could be any shape—square, triangular, rectangular, etc. We used a cylindrical geometry in the sketch because it looks like the specimens you will use in the laboratory. You may consider the system as “Cartesian” if the area for conduction is constant in the direction of heat transfer.

ME 320: Heat Transfer Conduction Heat Transfer Investigation
4
0dx
Td2
2
= (10)
which can be integrated twice to obtain the general form of the temperature distribution ( ) 21 CxCxT += (11)
Applying the boundary condition T(0) = T1at the left end gives 12 TC = (12)
Likewise, applying the boundary condition at the right end T(L) = T2yields
( )
LTTC 12
1
−= (13)
Substituting into the general solution for T(x):
( ) ( ) ( ) ⎟⎠⎞
⎜⎝⎛−−=+⎟
⎠⎞
⎜⎝⎛−=
LxTTTT
LxTTxT 211112 (14)
or in dimensionless form
( )
Lx
TTTxT
12
1 =−− (15)
This result demonstrates the well-known finding that for steady, one-dimensional heat conduction through a plane wall with constant thermal conductivity and no volumetric heat generation, the temperature varies linearly with x. Now, using Fourier's law to relate the heat flux to the temperature gradient
( ) ( )
LTTk
LTTk
dxdTk
Aq"q 2112x
x
−=
−−=−== (16)
qx is the heat transfer rate in the x-direction, and A is the cross-sectional area normal to the x-direction.
Rearranging for qx
( )
LTTkAq 21
x
−= (17)
Note that by solving this equation for (T1- T2)/L and substituting into the solution for T(x), the temperature distribution may also be expressed in the form

ME 320: Heat Transfer Conduction Heat Transfer Investigation
5
( ) xkAq
TxT x1 −= (18)
In analogy with Ohm's law for electrical resistance, Relec= ΔE/I, the thermal resistance is defined as the ratio of the driving potential ΔT to the corresponding transfer rate qx. For steady heat transfer through a plane wall, the thermal resistance for conduction is therefore given by
( )
kAL
qTT
Rx
21cond =
−= (19)
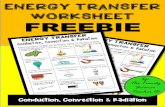
D. Composite Walls One-dimensional conduction through more complex systems, such as composite walls, is easily analyzed using the thermal resistance concept. For example, consider the three-layer plane wall shown below.
A B C
LA
kA ALB
kBALC
kC A
T1 T2 T3 T4qx
LA
T1
T2
T3qx
LC
T4
LB
•
•
•
•
x
From the definition of thermal resistance, the heat transfer rate qx can be expressed in terms of the
overall temperature difference ΔT = (T1- T4)as
( )
RTT
RTq 41
x Σ−
=ΣΔ
≡ , (20)

ME 320: Heat Transfer Conduction Heat Transfer Investigation
6
where ΣR is the total thermal resistance between nodes 1 and 4. For the series circuit shown above, the total resistance is simply the sum of the individual resistances,
Ak
LAk
LAk
LRRRRc
C
B
B
A
A3,cond2,cond1,cond ++=++=Σ (21)
or
( )
⎟⎟⎠
⎞⎜⎜⎝
⎛++
−=
AkL
AkL
AkL
TTq
C
C
B
B
A
A
41x (22)
E. Contact Resistance Up to this point, we have neglected the finite resistance that occurs at the interface between materials. This contact resistance is primarily a result of surface roughness, in that regions of contact between two materials are interspersed with gaps, which are usually filled with air.
x
′ ′ q T A
T B
ΔT
T(x)
A B
Contact Region
x
Gap
•
•
The heat transfer that occurs at the interface may be thought of as the parallel contributions of conduction across the contact areas and conduction, convection, and/or radiation across the interstitial gaps. Especially for rough surfaces, the contact area at the interface is small and the major resistance is due to the gaps. In analogy to the definition of the conduction thermal resistance given above, the contact resistance for a unit area of the interface is defined as the ratio of the temperature difference at the interface (driving potential) to the heat flux (transfer rate)
( )
x
BA
xcont q
TTqTR
′′−
=′′
Δ≡′′ (23)

ME 320: Heat Transfer Conduction Heat Transfer Investigation
7
The contact resistance between materials can be decreased by reducing the roughness of the mating surfaces and/or by increasing the pressure at the interface. In addition, any interstitial material whose thermal conductivity exceeds that of air may be used to reduce the contact resistance. Common materials that are used for this purpose include soft metals, such as lead, tin, or silver foil, and thermal greases. F. Steady, One-Dimensional Conduction in a Cylindrical System A ubiquitous application where radial heat conduction occurs may be found in piping systems, where it is common for conduction from the inside to the outside of the pipe wall to occur. You may wish to consider that geometry as the discussion turns to heat conduction in a cylindrical coordinate system. This situation is sketched below where r1 and r2 are the inner and outer pipe radii, T1 and T2 are the inner and outer surface temperatures, and L is the length of pipe under consideration (or disk thickness in the case of our experiments)*.
L
r2
r1
qr
T
rr1 r2
T1
T2
T2
T1
For steady state conditions with no internal heat generation, and assuming a circumferentially symmetric temperature distribution (∂T/∂Φ = 0), with no heat conduction in the axial direction (∂T/∂z = 0), the heat transfer will occur only radially through the cylindrical walls. The heat diffusion equation, written in cylindrical coordinates, reduces to
0drdTkr
drd
=⎟⎠⎞
⎜⎝⎛ (24)
* Note that for radial heat conduction, the area perpendicular to the radial heat flux, 2πrL, changes with radial location, r. Radial conduction cannot be analyzed without considering the cylindrical geometry.

ME 320: Heat Transfer Conduction Heat Transfer Investigation
8
From Fourier's Law for radial conduction
( ) ( )drdTrL2krL2qAqq rrr π−=π′′=′′= (25)
where qr is the radial heat transfer rate, rq ′′ is the radial heat flux, and A = 2πrL is the cross-sectional area normal to the heat flux at any radius r. Multiplying the first equation above by the constant (-2πL) and moving this quantity inside the first derivative, we recognize that it states
0drdqr = (26)
or, for steady state conditions with no volumetric heat generation, the radial heat transfer rate qr, (but not the heat flux rq ′′ ) is constant, independent of the radial location. This result should be obvious from energy balance considerations. Returning to the simplified heat diffusion equation above, and now assuming constant thermal conductivity, it reduces to
0drdTr
drd
=⎟⎠⎞
⎜⎝⎛ (27)
Integrating twice, the general solution for the temperature distribution is ( ) 21 CrlnCrT += (28)
Applying the boundary conditions T(r1) = T1 and T(r2) = T2, solving simultaneously for the constants C1 and C2, and substituting into the expression above, the particular solution for the radial temperature profile is given by
( ) ( )( )
( )( ) ⎟⎟
⎠
⎞⎜⎜⎝
⎛−−=+⎟⎟
⎠
⎞⎜⎜⎝
⎛−=
112
2111
112
12
rrln
rrlnTTTT
rrln
rrlnTTrT (29)
or in dimensionless form
( ) ( )( )12
1
12
1
rrlnrrln
TTTrT
=−− (30)
This result shows that, under these assumptions, the temperature varies logarithmically for radial conduction through cylindrical walls, rather than linearly as for plane walls. Applying Fourier's Law to relate the heat-transfer rate to the temperature difference across the cylindrical walls

ME 320: Heat Transfer Conduction Heat Transfer Investigation
9
( ) ( ) ( )( ) r
1rrlnTTrL2k
drdTrL2kq
12
12r
−π−=π−= (31)
or
( )( )
( )12
21r rrln
TTkL2q −π= (32)
If this expression is solved for (T1 - T2)/ln(r2/r1) and the result substituted into the equation for T(r), the temperature distribution can also be written as
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛π
−=1
r1 r
rlnLk2
qTrT (33)
Using the definition of thermal resistance
r
21cond q
TTR −≡ (34)
we see that the conduction resistance for radial heat transfer through cylindrical walls is given by
( )Lk2
rrlnR 12cond π
= (35)
III. Experiments Objectives The objectives of this experiment are as follows:
(1) To determine the thermal conductivity of several metallic and insulating materials; (2) To investigate conduction heat transfer in a composite wall system; (3) To evaluate the contact resistance at the interface between materials; (4) To investigate radial conduction through a cylindrical-walled system; (5) To compare the experimental measurements to handbook or theoretical results and to discuss
and explain any differences.

ME 320: Heat Transfer Conduction Heat Transfer Investigation
10
Property Values In order to provide a basis for comparison of the experimental measurements you will obtain, the thermal conductivity for several common materials are listed below[1]. Brass (70% Cu, 30% Zn): k = 110 W/m•K 304 stainless steel: k = 14.9 W/m•K 316 stainless steel: k = 13.4 W/m•K Teflon®: k = 0.35 W/m•K For the materials listed above, the value of thermal conductivity depends on the specific composition and temperature—given above are nominal values. Unfortunately, the equipment manufacturer did not specify the thermal conductivity for the samples supplied with the apparatus you will use in your experiments. Apparatus Measurements of conduction heat transfer will be obtained using an experimental setup consisting of two components: a "linear module" for the study of steady, one-dimensional conduction through plane walls; and a "radial module" for investigation of steady, one-dimensional radial conduction through cylindrical walls. Linear Module The linear module is sketched below. This apparatus has a control unit, shown on the left-hand side of the sketch, and a thermal unit, shown on the right-hand side of the sketch. Within the thermal unit, the conduction sample is clamped between heater and cooler sections as shown. In the sketch, the heater section is at the left end of the thermal unit; it consists of an electrical resistance heater with a 25-mm-diameter brass rod immediately to its right. Three temperature sensors (1, 2, and 3) are installed at 10-mm intervals along the length of this brass rod. The cooler section is a 25-mm-diameter brass rod with chilled water running over its right end (see schematic). Three temperature sensors (7, 8, and 9) are located along this rod at 10-mm intervals. Several samples are available for study as listed below.

ME 320: Heat Transfer Conduction Heat Transfer Investigation
11
1 2 3 4 5 6 7 8 9
Temperature
"On/Off" switch
Thermocouple selector switch
Heater power control
Wattmeter Heater
Sample
Cooling water
Cooler
Temperature measurement points at 10 mm intervals
Heater power socket
54 C 60.4
Material Nominal Dimensions Brass 25 mm dia. x 30 mm long Stainless steel 25 mm dia. x 30 mm long Teflon® 25 mm dia. heat transfer area The metallic samples are instrumented with three temperature sensors (4, 5, and 6) located at 10-mm intervals; the Teflon® sample is not instrumented. The ends of the brass heater and cooler sections and the metallic samples have all been given a fine surface finish to promote good thermal contact; a heat-conducting compound may also be applied at these surfaces to reduce thermal resistance. In order to minimize energy losses from the periphery of the linear module, the heater and cooler sections and the metallic conduction samples are enclosed in an insulating case that includes an air gap. Electrical power is supplied to the heater section by means of the control unit, shown in the left portion of the sketch above. Heater power is controlled over the range from 0 - 100 Watts, by a variable transformer and can be read by means of the wattmeter digital display located on the front panel of the console. A nine-position selector switch permits the temperature to be read, via a digital display, at any one of the sensor locations on the linear module. Radial Module The radial module is shown in the schematic below. Like the linear module, the radial module has a control unit and a thermal unit. The thermal unit consists of an annular brass disk of nominal thickness 3 mm and inner and outer radii of r1 = 4 mm and r2 = 55 mm, respectively. An electrical heater is located in the center of the disk (r < 4 mm), and the outer periphery of the disk is cooled by means of water circulating in a copper tube. Six temperature sensors are located along the disk radius, starting at the center, r = 0, and then in 10-mm intervals. Again, energy loss is minimized by preserving an air gap around the disk with an insulating case. Electrical power is controlled and supplied to the heater by

ME 320: Heat Transfer Conduction Heat Transfer Investigation
12
means of the same control unit used with the linear module. The heater power and temperatures are also read using the digital displays on the front panel.
6 5 4 3 2 1
Temperature
"ON/OFF" switch
Thermocouple selector switch
Heater power control
Wattmeter
Heater
Cooling water
Temperature measurement points at 10 mm intervals
Heater power socket
Disk
54 C 60.4
Experiment 1: Thermal Conductivity Measurements In this experiment the linear module is used to measure the thermal conductivity of several typical metals and insulators: brass, stainless steel, and Teflon®. In order to maximize the resolution of the temperature measurements, the electrical power supplied to the heater should be adjusted so that the maximum temperature in the heater section is in the range T1 = 80 to 100°C. Under no circumstances should you exceed T1 = 100°C—exceeding this temperature will damage the experimental apparatus. A data sheet will be supplied for your use during the laboratory exercise; it will include suggested heater powers. In order to obtain accurate measurements, steady state conditions should be achieved as closely as possible. You should monitor system temperatures to determine when steady state is attained. For the thermal conductivity measurements, the thermal grease (a heat-conductive compound) supplied with the apparatus should be applied at each interface, metal-to-metal or metal-to-Teflon®. This compound will minimize contact resistance at these joints. For each conductivity determination, the conduction sample is clamped between the heating and cooling sections, the appropriate heater power is supplied, the temperature readings are monitored until steady state conditions are reached, and these temperature measurements are then recorded. To measure the thermal conductivity of brass, use the 25-mm-diameter x 30-mm long instrumented brass sample. With this specimen, the brass heater, sample, and cooler sections will provide an 80-mm long continuous brass sample with 9 temperature sensors (T1 - T9) located every 10 mm along its length. A least-squares line can be fit to the temperature readings to determine the temperature gradient along the brass rod.

ME 320: Heat Transfer Conduction Heat Transfer Investigation
13
0 10 20 30 40 50 60 70 80 x (mm)
T
T1T9
Brass Sample
CoolerHeater
The thermal conductivity of stainless steel is determined by measuring the temperature distribution in the 25-mm-diameter x 30-mm-long SS sample at steady-state conditions (sensors T4 - T6). A least-squares linear fit to these three temperature readings can then be used to determine the temperature gradient in the stainless steel. Note the sensors in this sample are spaced at 10-mm intervals with T4 and T6 assumed to be 5 mm from the adjacent ends.
0 10 20 30 40 50 60 70 80 x (mm)
T
Stainless Steel Sample CoolerHeater
T4 T6
The same general experimental method is used for determining k for the Teflon® sample. However, since this sample is not instrumented with temperature sensors, a different procedure must be used for determining the temperature gradient. In this case, the three temperature readings in the heating section (T1 - T3) are least-squares fit and the resulting linear equation is used to extrapolate for the heater/sample interface temperature TA. A similar procedure is used for the three cooling-section temperature readings (T7 - T9) in order to extrapolate for the sample/cooler interface temperature TB Assuming a linear temperature profile through the sample then allows determination of its temperature gradient. Note that we will assume that sensors T3 and T7 are located exactly 5 mm from the adjacent interface. The thickness of the Teflon® sample should be measured with a micrometer. The procedure just described could also have been used to determine the thermal conductivity of brass and stainless steel, but direct measurement of the temperature gradient using the instrumented samples, as outlined above, is preferable.

ME 320: Heat Transfer Conduction Heat Transfer Investigation
14
0 10 20 x (mm)
T
T1
T9
5 15 25
Teflon Sample CoolerHeater
T3
T7
TA
TB
Lsamp
Once the temperature gradient in each sample is determined, its thermal conductivity can be found from Fourier's Law
dx
dTAqk x−
= (36)
The values determined from the measurements should be compared to handbook values for each material. Experiment 2: Composite Wall Heat Conduction In this experiment, steady heat conduction through a composite plane wall will be studied using the linear module. The composite wall to be investigated consists of the following system:
qx
qx
Brass heater (25 mm diameter)
Brass sample (25 mm diameter)
Brass cooler (25 mm diameter)
25 mm 30 mm 25 mm
T1 T9
T9T1R1 R 2 R 3 R 4
Teflon sample (25 mm diameter heat transfer area)
•
Teflon thickness
Conductive paste should be applied at all interfaces before the samples are clamped into the linear module. The procedure is similar to that discussed previously. An appropriate heater power is supplied such that T1 is 80 to 100°C, and the system is allowed to come to steady state. In this case, however, only temperatures T1 and T9 are recorded. Using the conductivity values determined in the earlier experiments, estimate the individual resistances R1, R2, R3, R4 indicated in the sketch above and the total resistance ΣR. From the total thermal resistance and the measured temperatures T1 and T9, compute the expected heat transfer rate

ME 320: Heat Transfer Conduction Heat Transfer Investigation
15
( )
RTT
q 91x Σ
−= (39)
Compare this value of qx to that measured with the wattmeter.
Experiment 3: Contact Resistance This experiment demonstrates the concept of contact resistance using the instrumented 25-mm-diameter brass sample. One of the interfaces, for example the heater/sample interface, is carefully cleaned, while the heat-conducting compound is applied to the sample/cooler interface. Power is supplied to the heater, the system is allowed to come to thermal equilibrium, and temperatures T1 - T9 are recorded. Least-squares linear fits are then obtained for each group of three temperature readings in the heater (T1 - T3), sample (T4 - T6), and cooler (T7 - T9) sections. These fits can then be used to extrapolate for the temperatures on each side of each interface (TA, TB) and (TC, TD).
0 10 20 30 40 50 60 70 80 x (mm)
T
T1T9
Sample CoolerHeaterTA
TBTC
TD
Note that the interfaces are assumed to be at x = 25 and 55 mm, respectively. Using the temperature difference and measured heat flux, xq ′′ = qx/A, determine and compare the contact resistance for a unit area of each interface based on the definition
"q
TRx
cont
Δ≡′′ (40)
Note that the preceding experiments have neglected contact resistances. Experiment 4: Radial Conduction Radial heat conduction through cylindrical walls is investigated in this experiment using the radial module, which was described and sketched earlier. As in previous experiments, electrical power is supplied to the radial module such that T1 is in the range of 80 - 100°C, steady state conditions are obtained, and temperature readings T1 - T6 are recorded. Although T1 is actually measured at the disk center, r = 0, the equipment manufacturer states that this measurement can be assumed to apply at the disk inside radius, r1 = 4 mm. The other five sensors are located at r = 10, 20, 30, 40, and 50 mm, respectively. Plot and compare the measured radial temperature distribution to the following theoretical distributions derived earlier in this manual:

ME 320: Heat Transfer Conduction Heat Transfer Investigation
16
( ) ( )( ) ⎟⎟
⎠
⎞⎜⎜⎝
⎛−−=
116
611 r
rlnrrlnTT
TrT (41)
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛π
−=1
r1 r
rlnLk2
qTrT (42)
In the first expression use the measured values of T1 and T6, and in the second, use the measured values of T1 and qr and the value of thermal conductivity for brass determined in your experiments. Note that the disk thickness, L, is nominally 3 mm. Discuss the agreement and/or discrepancies between the data and the two theoretical temperature profiles.
IV. Technical Report A brief discussion of the material to include in the technical report for this experiment follows.
See the handout "Technical Reports" for additional guidelines on report writing. Your TA will give you specific guidelines for this report; however, you may expect your report to include the following sections: Introduction The Introduction should clearly describe the objectives and motivation for the experiments. It should include a concise description of pertinent background information related to conduction heat transfer, key assumptions, equations, and variables used in the analysis. Methods This section should contain a brief description of apparatus and procedures used in obtaining the data. Enough information (such as figures and schematic diagrams where necessary) should be included so that the reader has a clear idea of the equipment and methods used, but unnecessary detail should be omitted. Results and Discussion This is the most important section of your report. At a minimum, it should contain at least the following:
(1) The three T vs. x temperature plots used to determine the thermal conductivity of the brass, stainless steel, and Teflon® samples;
(2) The experimentally determined thermal conductivity of the three samples and a comparison to accepted handbook or nominal values;
(3) The measured and predicted values of the heat transfer rate qx for the composite wall; (4) The T vs. x plot used to determine contact resistance; (5) The experimentally found contact resistance of both the clean and greased interfaces; (6) The T vs. r plot from the radial conduction experiment, including theoretical curves.
In all cases the agreement or discrepancies between experimental measurements and handbook or theoretical values should be discussed and explained if possible.

ME 320: Heat Transfer Conduction Heat Transfer Investigation
17
Conclusions and Recommendations This section should restate the most significant results of the experiment in a brief and concise manner. If you have any recommendations for further study or improvements to be made in the experiment's design or procedure, they should be included in this section. Reference
[1] Incropera, F. P., and DeWitt, D. P., Fundamentals of Heat and Mass Transfer, 4th edition, Wiley, New York, 1996.

ME 320: Heat Transfer Conduction Heat Transfer Investigation
Experiment 1: Thermal Conductivity Apparatus Number________ Notes: 1. Use conductive compound between all interfaces. 2. Set T1 to be 90oC. Insert Heater Power T1 T2 T3 T4 T5 T6 T7 T8 T9
Brass (25mm x 30mm)
Stainless Steel (25 x 30mm)
Teflon 25mm dia.
Teflon thickness
Experiment 2: Composite Wall Apparatus Number________ Notes: 1. Use conductive paste at all interfaces 2. Set T1 to be 90oC. Insert Heater Power T1 T2 T3 T4 T5 T6 T7 T8 T9
Brass and Teflon
Experiment 3: Contact Resistance Apparatus Number________ Notes: 1. One interface should be clean and dry; the other should have conductive compound applied. 2. Set T1 to be 90oC. Insert Heater Power T1 T2 T3 T4 T5 T6 T7 T8 T9
Brass 25mm x 30mm
Experiment 4: Radial Conduction Apparatus Number________ Notes: 1. The "inner radius" is 4mm; T1 can be assumed to equal the temperature at r=4mm. 2. Set T1 to be 90oC. Radial Setup Heater Power T1 T2 T3 T4 T5 T6
Brass 55mm x 3mm thick