Assimilating subsampled airborne lidar: How much lidar is...
1
Assimilating subsampled airborne lidar: How much lidar is enough? J.M. Pflug 1 , J.D. Lundquist 1 1 Civil and Environmental Engineering, University of Washington, USA Figure 1. (1) Three NASA campaigns (CA, WA, and CO) and a campaign in Switzerland (CH) with ground observations and lidar snow data will be used to assess the combination of remotely-sensed products and modeling that poses the best ability to represent snow in each domain. A target baseline (2, black) simulation will be developed to match well with high-resolution lidar (3.A) and ground observations. This will be compared to outputs from a model subject to errors from perturbed precipitation forcing (2, red) and to outputs from the perturbed model (2, blue) updated by assimilating airborne (3.B) and simulated satellite observations (3.C). Figure 2. Snow observations (solid lines) at Buckinghorse SNOTEL in Northwest Washington State compared to a range encompassing SnowModel ensembles with perturbed precipitation (A). Simulations assimilating observed SWE (B) and snow depth (C and D) are also depicted. The SnowModel assimilation routine (Liston and Hiemstra, 2008) uses observations to scale precipitation forcing and calculated melt for periods between observations. Although this routine was developed to ingest observations of snow water equivalent (SWE), assimilation using lidar snow depth observations and modeled density (Figure 2C) was 52% better (Figure 2B). This improvement shows that snow density is being modeled well and perturbations in precipitation forcing are impacting modeled density less than SWE. Snow depth assimilation Airborne lidar snow depth retrievals are vital for water resource management in basins with limited snow observations. However, airborne lidar remains impractical to collect frequently over large domains due to the high economic cost. In this study, we investigated the extent to which lidar coverage improved modeled snow evolution using a distributed model and assimilation scheme. Full-coverage Airborne Snow Observatory snow depth data in Tuolumne, California and the Olympic Mountains of Northwest Washington State were used as a baseline in which to test the improvement in modeled snow water resources when optimizing flight frequency, timing, and spatial coverage. Collections over multiple seasons in Tuolumne were also used to investigate the impact when calibrating and assimilating observed snow patterns. Continued work discusses applications for water resource management planning and the design of future space-based observation systems. Abstract Model performance is often compromised by uncertainties in forcing data. To mimic these uncertainties, locally-calibrated baseline simulations were perturbed by an hourly precipitation bias ranging from ±25% to ±200% (constant in time) with 15% gaussian noise (random in time) (Figure 2A). Baseline and perturbed simulations Figure 3. Model Performance versus airborne lidar observations for 20m simulations (A) and simulations perturbing precipitation with 15% gaussian noise (random in time, uniform in space) and 30% bias (uniform in time and space) (B). Modeled snow depth improvements are shown when assimilating the average depth at every gridcell (E), a northbound lidar swath (C), and an elevation-oriented lidar swath (D). SnowAssim uses a meteorological interpolation scheme (Barnes, 1964) to distribute precipitation and melt adjustments across a model domain. Prior to assimilation, we can train snow patterns by calibrating SnowModel’s parameters responsible for snow deposition and scour. Following Sturm and Wagner (2010), we created a map of observed standardized depth values (SDV), SDV ij = depth ij − depth σ depth . Calibrating SnowModel’s distribution patterns improved SDV mean squared error by 52%, but still poorly represented distributed snow depth (Figure 6). However, snow patterns could be represented using the observed SDV and modeled mean SWE. Bias could then be corrected with observations and then assimilated at every point (Figure 7). Spatial assimilation Snow depth persistence Figure 5. Repeat airborne lidar-observed snow depth for a wind-swept location near Tuolumne meadows, CA. Scenes are for four collections out of the 40 available collections depicted in the timeline. Conclusions and continued work Figure 6. Standardized depth values (left) and snow depth (right) for simulations with default parameters (top), and parameters calibrated to reproduce the observed snow depth patterns (bottom). Although MSE was reduced when calibrating, overall snow depth across the scene was too homogeneous. Snow depth patterns are a product of terrain, vegetation, and micro-meteorology and tend to be repeatable between typical snow seasons. When observing 40 lidar collections over 4 snow seasons in Tuolumne, CA (timeline, right), the complex snow depth patterns in Figure 5 varied little. This pattern was even more persistent when including only the lidar closest to peak-SWE, excluding snow seasons with abnormally deep or shallow snowpacks. Justin Pflug University of Washington, Civil and Environmental Engineering Email: [email protected] Website: depts.washington.edu/mtnhydr/ Phone:303-917-1112 CONTACT REFERENCES Barnes, S.L. (1964). A Technique for Maximizing Details in Numerical Weather Map Analysis. J. Appl. Meteorol. 3, 396–409. Le Moigne, J., Dabney, P., de Weck, O., Foreman, V., Grogan, P., Holland, M., Hughes, S., and Nag, S. (2017). Tradespace analysis tool for designing constellations (TAT-C). 2017 IEEE Intntl. Geosc. and Rem. Sensing Symposium (IGARSS), (IEEE), pp. 1181–1184. Liston, G.E., and Elder, K. (2006). A distributed snow-evolution modeling system (SnowModel). J. Hydrometeorol. 7, 1259–1276. Liston, G.E., and Hiemstra, C.A. (2008). A Simple Data Assimilation System for Complex Snow Distributions (SnowAssim). J. Hydrometeorol. 9, 989–1004. Sturm, M., and Wagner, A.M. (2010). Using repeated patterns in snow distribution modeling: An Arctic example. Water Resour. Res. 46, W12549. Figure 4. Cost- uncertainty trade-space and statistics for Figure 3 are shown for each collection strategy. While not currently investigated, space- based determination of snow depth will be simulated using NASA’s TAT-C platform (Le Moigne et al., 2017) and full lidar collections. Figure 7. Lidar- observed SDV (top-left) and modeled SWE (top- right) are used to derive the SWE CDF for the scene (bottom-left, blue). Assuming a bias corrected by observation (stars), a new bias-corrected assimilation product can be derived (bottom-left, black; and bottom-right). Various applications of lidar corrected model accuracy to different degrees. Using a simple assimilation scheme and a distributed model: • Reduced lidar frequency increased model uncertainty • Randomly-oriented lidar snow depth observations corrected model bias • Strategically-located lidar snow depth observations corrected model bias and improved spatial performance • Observed snow depth patterns were able to train assimilation at points away from observations Results suggest that repeat, full-coverage lidar collections for water management purposes are redundant and economically expensive. Given a distributed model and number of full collections in a typical water-year, distributed SWE can be modeled to a high degree of accuracy using: a) manual observations, b) a single lidar swath, or c) space-based coarse observations of snow depth.
Transcript of Assimilating subsampled airborne lidar: How much lidar is...

Assimilating subsampled airborne lidar: How much lidar is enough?J.M. Pflug1, J.D. Lundquist1
1Civil and Environmental Engineering, University of Washington, USA
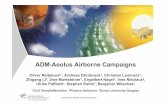
Figure 1. (1) Three NASA campaigns (CA, WA, and CO) and a campaign in Switzerland (CH) with ground observations and lidar snow data will be used to assess the combination of remotely-sensed products and modeling that poses the best ability to represent snow in each domain. A target baseline (2, black) simulation will be developed to match well with high-resolution lidar (3.A) and ground observations. This will be compared to outputs from a model subject to errors from perturbed precipitation forcing (2, red) and to outputs from the perturbed model (2, blue) updated by assimilating airborne (3.B) and simulated satellite observations (3.C).
Figure 2. Snow observations (solid lines) at Buckinghorse SNOTEL in Northwest Washington State compared to a range encompassing SnowModel ensembles with perturbed precipitation (A). Simulations assimilating observed SWE (B) and snow depth (C and D) are also depicted.
The SnowModel assimilation routine (Liston and Hiemstra, 2008) uses observations to scale precipitation forcing and calculated melt for periods between observations. Although this routine was developed to ingest observations of snow water equivalent (SWE), assimilation using lidar snow depth observations and modeled density (Figure 2C) was 52% better (Figure 2B). This improvement shows that snow density is being modeled well and perturbations in precipitation forcing are impacting modeled density less than SWE.
Snow depth assimilation
Airborne lidar snow depth retrievals are vital for water resource management in basins with limited snow observations. However, airborne lidar remains impractical to collect frequently over large domains due to the high economic cost. In this study, we investigated the extent to which lidar coverage improved modeled snow evolution using a distributed model and assimilation scheme. Full-coverage Airborne Snow Observatory snow depth data in Tuolumne, California and the Olympic Mountains of Northwest Washington State were used as a baseline in which to test the improvement in modeled snow water resources when optimizing flight frequency, timing, and spatial coverage. Collections over multiple seasons in Tuolumne were also used to investigate the impact when calibrating and assimilating observed snow patterns. Continued work discusses applications for water resource management planning and the design of future space-based observation systems.
Abstract
Model performance is often compromised by uncertainties in forcing data. To mimic these uncertainties, locally-calibrated baseline simulations were perturbed by an hourly precipitation bias ranging from ±25% to ±200% (constant in time) with 15% gaussian noise (random in time) (Figure 2A).
Baseline and perturbed simulations
Figure 3. ModelPerformance versus airborne lidar observations for 20m simulations (A) and simulations perturbing precipitation with 15% gaussian noise (random in time, uniform in space) and 30% bias (uniform in time and space) (B). Modeled snow depth improvements are shown when assimilating the average depth at every gridcell (E), a northbound lidar swath (C), and an elevation-oriented lidar swath (D).
SnowAssim uses a meteorological interpolation scheme (Barnes, 1964) to distribute precipitation and melt adjustments across a model domain. Prior to assimilation, we can train snow patterns by calibrating SnowModel’s parameters responsible for snow deposition and scour. Following Sturm and Wagner (2010), we created a map of observed standardized depth values (SDV),
SDVij =depthij − depth
σdepth.
Calibrating SnowModel’s distribution patterns improved SDV mean squared error by 52%, but still poorly represented distributed snow depth (Figure 6). However, snow patterns could be represented using the observed SDV and modeled mean SWE. Bias could then be corrected with observations and then assimilated at every point (Figure 7).
Spatial assimilation
Snow depth persistence
Figure 5. Repeat airborne lidar-observed snow depth for a wind-swept location near Tuolumne meadows, CA. Scenes are for four collections out of the 40 available collections depicted in the timeline.
Conclusions and continued work
Figure 6. Standardized depth values (left) and snow depth (right) for simulations with default parameters (top), and parameters calibrated to reproduce the observed snow depth patterns (bottom). Although MSE was reduced when calibrating, overall snow depth across the scene was too homogeneous.
Snow depth patterns are a product of terrain, vegetation, and micro-meteorology and tend to be repeatable between typical snow seasons. When observing 40 lidar collections over 4 snow seasons in Tuolumne, CA (timeline, right), the complex snow depth patterns in Figure 5 varied little. This pattern was even more persistent when including only the lidar closest to peak-SWE, excluding snow seasons with abnormally deep or shallow snowpacks.
Justin PflugUniversity of Washington, Civil and Environmental EngineeringEmail: [email protected]: depts.washington.edu/mtnhydr/Phone:303-917-1112
CONTACT REFERENCESBarnes, S.L. (1964). A Technique for Maximizing Details in Numerical Weather Map Analysis. J. Appl. Meteorol. 3, 396–409.Le Moigne, J., Dabney, P., de Weck, O., Foreman, V., Grogan, P., Holland, M., Hughes, S., and Nag, S. (2017). Tradespace analysis tool for designing constellations (TAT-C).
2017 IEEE Intntl. Geosc. and Rem. Sensing Symposium (IGARSS), (IEEE), pp. 1181–1184.Liston, G.E., and Elder, K. (2006). A distributed snow-evolution modeling system (SnowModel). J. Hydrometeorol. 7, 1259–1276.Liston, G.E., and Hiemstra, C.A. (2008). A Simple Data Assimilation System for Complex Snow Distributions (SnowAssim). J. Hydrometeorol. 9, 989–1004.Sturm, M., and Wagner, A.M. (2010). Using repeated patterns in snow distribution modeling: An Arctic example. Water Resour. Res. 46, W12549.
Figure 4. Cost-uncertainty trade-space and statistics for Figure 3 are shown for each collection strategy. While not currently investigated, space-based determination of snow depth will be simulated using NASA’s TAT-C platform (Le Moigne et al., 2017) and full lidar collections.
Figure 7. Lidar-observed SDV (top-left) and modeled SWE (top-right) are used to derive the SWE CDF for the scene (bottom-left, blue). Assuming a bias corrected by observation (stars), a new bias-corrected assimilation product can be derived (bottom-left, black; and bottom-right).
Various applications of lidar corrected model accuracy to different degrees. Using a simple assimilation scheme and a distributed model:• Reduced lidar frequency increased model uncertainty• Randomly-oriented lidar snow depth observations corrected model bias• Strategically-located lidar snow depth observations corrected model bias and improved
spatial performance• Observed snow depth patterns were able to train assimilation at points away from
observationsResults suggest that repeat, full-coverage lidar collections for water management purposes
are redundant and economically expensive. Given a distributed model and number of full collections in a typical water-year, distributed SWE can be modeled to a high degree of accuracy using: a) manual observations, b) a single lidar swath, or c) space-based coarse observations of snow depth.