
Anatomía del sistema reproductor femenino Anatomía del sistema reproductor masculino.
Upload
mario-a-ceronCategory
view
235download
2description
Unidad IIntroducción a la Robótica
1.1 Definiciones y fundamentos básicos
1.1.2 Anatomía del robot
ITCM UNIDAD II Introducción a la Robótica
PARTES DE UN ROBOT
Los componentes de los robots se pueden observar desde dos puntos
de vista: general e industrial.
Como todo dispositivo funcional, los robots tienen una estructura
formada por diferentes sistemas o subsistemas y componentes.
ITCM UNIDAD II Introducción a la Robótica
El robot industrial es un manipulador de uso general controlado por computadora que consiste en algunos elementos rígidos conectados en serie mediante articulaciones prismáticas o de revolución.
El final del mismo esta fijo a una base soporte, mientras el otro extremo esta libre y equipado con una herramienta para manipular objetos o realizar tareas de montaje.

ITCM UNIDAD II Introducción a la Robótica
Mecánicamente, un robot se compone de base, cuerpo, brazo, antebrazo y muñeca, mas una herramienta, éste se diseña para alcanzar una pieza de trabajo localizada dentro de su volumen de trabajo.


ITCM UNIDAD II Introducción a la Robótica
Normalmente los robots están construidos en base a una serie de segmentos con articulaciones entre ellos (como un brazo humano).
Existen tres tipos básicos de articulaciones:•Rotacionales•Cilíndricas •Prismáticas
Un mayor número de articulaciones (grados de libertad) dan mayor flexibilidad, pero hacen más complejo el control de los movimientos del robot.

ITCM UNIDAD II Introducción a la Robótica
Algunos robots deben sostener o manipular objetos y para ello emplean dispositivos denominados de manera general medios de agarre.
El más común es la mano mecánica (derivada de la mano humana), llamada en inglés "gripper"
ITCM UNIDAD II Introducción a la Robótica
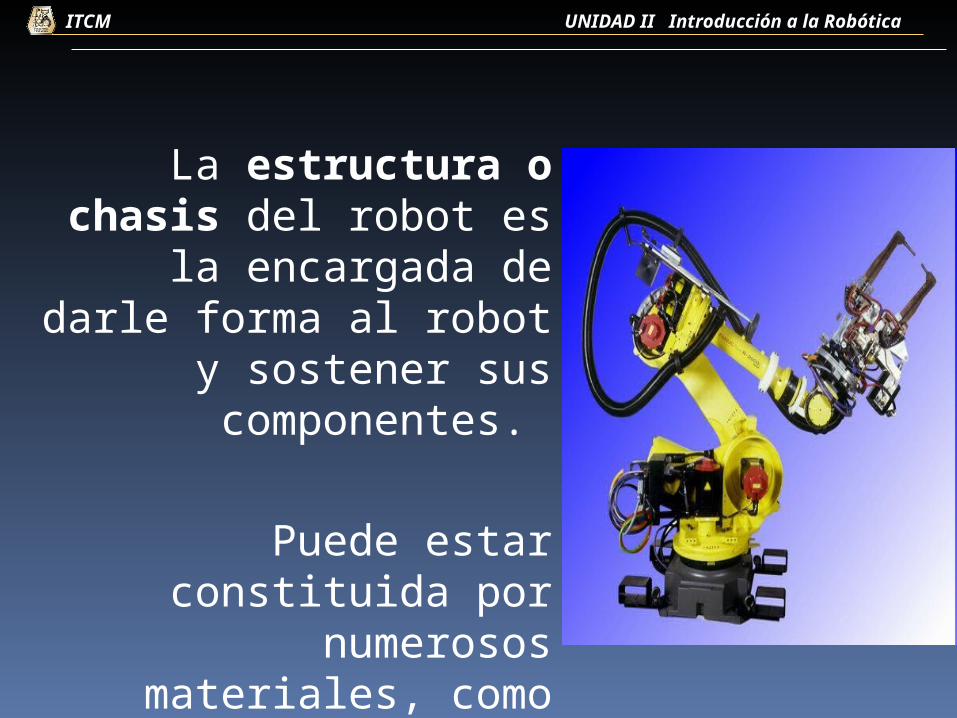
La estructura o chasis del robot es la encargada de
darle forma al robot y sostener sus componentes.
Puede estar constituida por numerosos materiales,
como plásticos y metales, y tener muchas formas
diferentes.
ITCM UNIDAD II Introducción a la Robótica
La fuente de movimiento más utilizada en el robot es el motor eléctrico.
Un motor es un dispositivo que convierte la energía eléctrica en energía mecánica.
ITCM UNIDAD II Introducción a la Robótica
En robótica se utilizan motores de CC (corriente continua), servomotores y motores paso a paso.
Una fuente de movimiento
nueva que apareció
recientemente
en el mercado son los
músculos eléctricos,
basados en
un metal especial llamado
Nitinol.
ITCM UNIDAD II Introducción a la Robótica
La fuente de alimentación de los robots depende de la aplicación que se les dé a
los mismos:Si el robot se tiene que desplazar autónomamente, se alimentará
seguramente con baterías eléctricas recargables.
Mientras que si no requiere desplazarse o sólo lo debe hacer mínimamente, se puede alimentar mediante corriente alterna a través de un convertidor.
Los actuadores son dispositivos que permiten al robot modificar el medio ambiente
Tipos de actuadores:
Locomoción (cambiar la posición del robot)
Manipulación (mover otros objetos)
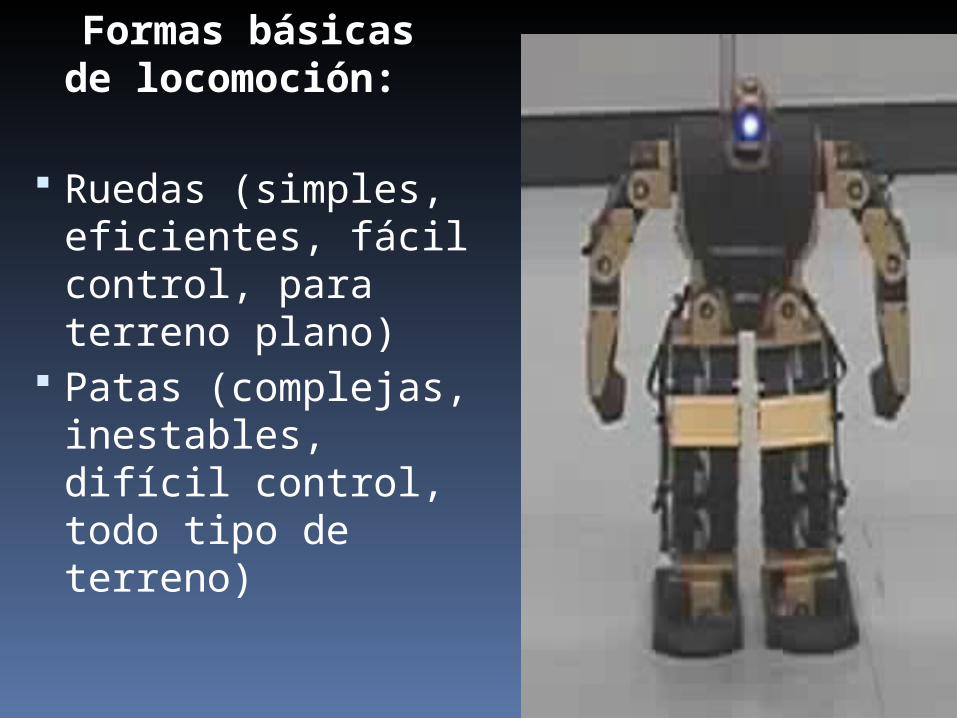
Formas básicas de locomoción:
Ruedas (simples, eficientes, fácil control, para terreno plano)
Patas (complejas, inestables, difícil control, todo tipo de terreno)
ITCM UNIDAD II Introducción a la Robótica
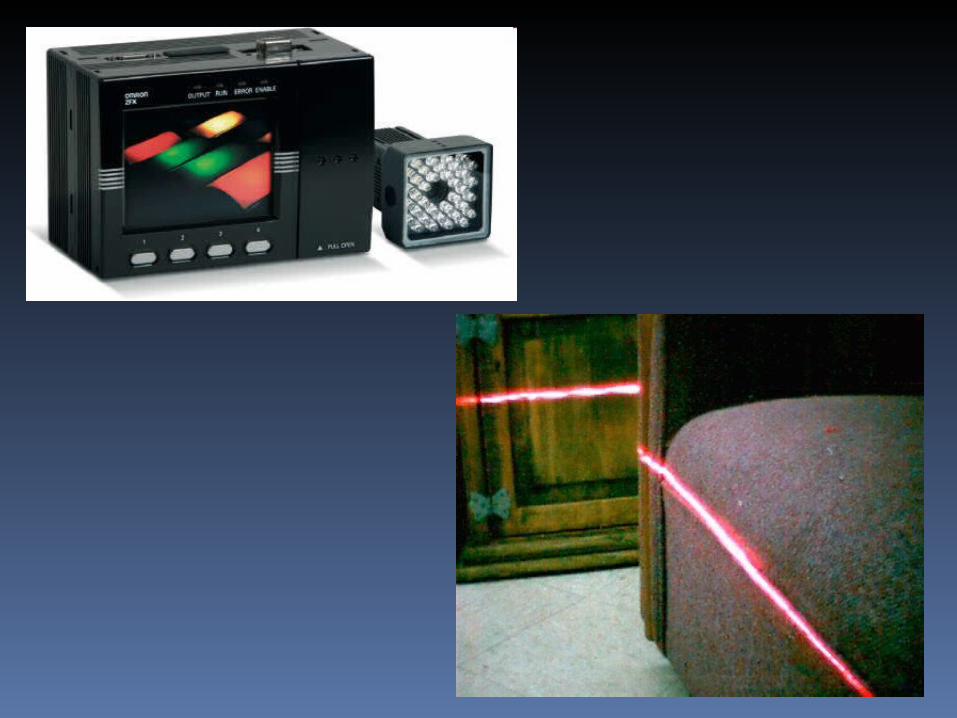
Los sensores le permiten al robot manejarse con cierta inteligencia al interactuar con el medio.
Son componentes que detectan o perciben ciertos fenómenos o situaciones.
Estos sensores pretenden en cierta forma imitar los sentidos que tienen los seres vivos.

ITCM UNIDAD II Introducción a la Robótica
Entre los diferentes sensores que podemos encontrar están:
Sensores de toque, de presión, de temperatura, de ultrasonido, de energíaFotoceldasFotodiodosMicrófonosCámaras Brújulas

ITCM UNIDAD II Introducción a la Robótica
Los circuitos de control son el "cerebro" del robot y en la actualidad están formados por componentes electrónicos más o menos complejos dependiendo de las funciones del robot y de lo que tenga que manejar.
ITCM UNIDAD II Introducción a la Robótica
Actualmente los modernos microprocesadores y microcontroladores, así como otros circuitos específicos para el manejo de motores y relés, los conversores A/D y D/A, reguladores de voltaje, simuladores de voz, etc. permiten diseñar y construir tarjetas de control para robots muy eficientes y de costo no muy elevado.
ITCM UNIDAD II Introducción a la Robótica
El sistema de control y el lenguaje de
programación forman el sistema de toma
automática de decisiones, que incluye
la planificación, el control de los
movimientos y la interpretación de los
datos que aportan los sensores.

ITCM UNIDAD II Introducción a la Robótica
Algunas tareas del robot son:
Integrar/interpretar la información de los sensores
Navegación (evitar obstáculos, ir a cierto lugar) Planeación (decidir la serie de datos para
cumplir una ó más metas)Construir modelos del ambiente (mapas)
Localizarse en el mundo (mapa)Reconocer lugares y/objetos
Manipular objetosComunicarse con otros agentes como computadoras, otros robots, personas

ITCM UNIDAD II Introducción a la Robótica


















