3- Minimization Review_DA.pdf

of 16
-
Upload
karen-dejo -
Category
Documents
-
view
35 -
download
0
Transcript of 3- Minimization Review_DA.pdf
-
Page 1
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 1
ECE 573 Power System Operations and Control
3. Review of Minimization Problem Solution
Techniques
George Gross
Department of Electrical and Computer Engineering
University of Illinois at Urbana-Champaign
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 2
UNCONSTRAINED MINIMIZATION
Consider the simple minimization problem:
and is continuously differentiable
A necessary condition for a minimum at is
is determined by finding the root of by
solving the set of n equations in n unknowns
nmin f x x
* Tf x 0
x*
(UMP )
: nf
f
x*
-
Page 2
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 3
NOTATION
Consider a continuously differentiable function
; for any , we
write
is always a row vector and so is a
column vector and is called the gradient of f
nf :
n, , ,
1 2
T nx x x x
1 2
, , ,n
f f ff x
x x x
T
f x f x
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 4
NOTATION
For the mapping ,
is an matrix with each being a
row vector in
n mg :
1
2
x
x
x
x m
g x
g g xg
x
g x
m n x ig x
n
-
Page 3
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 5
NOTATION
The Hessian is the second derivative of f
2
2
fH x f x
xx
2
n
n
n n n n nx x
2 2 2
1 1 1 2 11
2 2 2
2 2 1 2 2
2 2 2
1 2
f f ff x
x x x x x xx
f f ff x
x x x x x x xH x
f f ff x
x x x x x
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 6
NOTATION
We note that, by definition, is always
a symmetric matrix since
for a twice continuously differentiable function
f :
2 2
, 1, 2, ,i j j i
f fi j n
x x x x
H x
n
-
Page 4
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 7
THE GRADIENT DIRECTION
The Taylor series expansion for obtains
for small , we neglect the h.o.t. so that
Suppose we set ; then,
xf x x f x f x higher order terms in x
xf x x f x f x
T
xx f x
2
xf x x f x f x
for > 0
f
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 8
STEEPEST DESCENT
Thus is a direction of descent and is
called the steepest descent direction; is called the
step size
There is a large collection of optimization
techniques for general nonlinear functions; the
simplest is the steepest descent scheme
T
xf x
-
Page 5
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 9
STEEPEST DESCENT ALGORITHM
Step 0: determine an initial point x (0) ; set ,
define the convergence tolerances 1 > 0, 2 > 0
Step 1: compute
Step 2: if , stop; else evaluate
Step 3: set
Step 4: if ,stop and is the
solution; else, set and go to Step 1
T
x
vf x
1x vf x 1
T
x
v v vx x f x
21v vf x f x 1vx
1v v
v 0
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 10
STEEPEST DESCENT ITERATIONS
f x c 1
f x c c 2 1
3 2f x c c
x
3
x
4 x
2
x
1
0x
x2
contours
. of constant
value of
direction of the
negative of the
gradient
f xx1
21 43>c cc c
34f x c < c
-
Page 6
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 11
SLOW CONVERGENCE OF THE STEEPEST DESCENT METHOD
0x
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 12
We use Newtons method to find the root of
Note that in this case the Jacobian of is
the Hessian of
NEWTONS METHOD FOR MINIMIZATION
T
f x 0
f x
f x
2
2
f xH x
x
-
Page 7
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 13
Consider the problem
with continuously differentiable
We convert ( ECMP ) into the form of ( UMP ) by
defining a multiplier and the Lagrangian
EQUALITY - CONSTRAINED MINIMIZATION
( ECMP )
. .
min f x
s t
g x 0
n mg :
, Tx f x g x L
m
penalty for
g x 0violating
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 14
The necessary conditions for an optimum at
The presence of the m constraints leads
to the augmentation of the dimension of the
decision problem from n to n + m
A scheme for (UMP ) solution may be deployed to
solve for the (n + m) - dimensional optimal
decision variables
EQUALITY - CONSTRAINED MINIMIZATION
TT
x x
T T
x f x g x 0
x g x 0
* * * * *
* * *
,
,
L
L
* *,x
0xg
* *,x
-
Page 8
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 15
Consider the minimization problem
with
One way to solve (ICMP ) is by transforming
(ICMP ) into the form of (UMP )
INEQUALITY - CONSTRAINED MINIMIZATION
(ICMP )
. .
min f x
s t
x 0h
nh :
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 16
INEQUALITY - CONSTRAINED MINIMIZATION
We introduce for each inequality
the penalty function
and add the term to the objective
function with
2
i
i
i i
0 if h x 0p x
h x if h x 0
ih x
i ip x
i 0
-
Page 9
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 17
The penalty coefficient is chosen large enough
so as to force to satisfy each constraint
Thus we convert the problem to the (UMP ) form
We can use appropriate (UMP ) solution schemes
for determining
INEQUALITY - CONSTRAINED MINIMIZATION
1
i ii
min f x p x
x
*x
i
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 18
GENERAL MINIMIZATION PROBLEM
We consider the constrained minimization
problem
with and continuously
differentiable functions
min f x,u
s.t.
g x,u 0
h x,u 0
(CMP)
, m nf :
, m n mg :
n mu x and
and
-
Page 10
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 19
The inequality is treated by
appending the penalty functions
, to the objective to construct
Thus we focus on the resulting (ECMP)
GENERAL MINIMIZATION PROBLEM
, m nh :
i 1,2, ,
1
, , ,i i
i
f x u f x u p x u
s.t.
g x ,u 0
, ,i ip x u
min f x ,u
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 20
GENERAL MINIMIZATION PROBLEM
We may view the constraint as the
functional means by which is defined
We construct the Lagrangian
, , , ,Tx u f x u g x u L
penalty for violating
,g x u 0
g x,u 0
x x u
-
Page 11
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 21
NECESSARY CONDITIONS OF OPTIMALITY
For minimizing the unconstrained L , the
necessary conditions for optimality are
We consider a point at which
so that the total derivative
,
T T
T T
T T
x x x
u u u
f g 0
f g 0
g x u 0
L
L
L
x,u g x , u 0
d g g gx0
du x u u
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 22
We introduce the assumption that is
nonsingular in the region of interest; then
expresses the sensitivity of with respect to
which is obtained from the implicit functional
relationship
NECESSARY CONDITIONS OF OPTIMALITY
x
g
1g gx
u x u
x u
0u,xg
-
Page 12
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 23
From the necessary conditions
it follows that
We use this information for constructing the
reduced gradient as a descent direction
NECESSARY CONDITIONS OF OPTIMALITY
T T
x x xf g 0 L
T
x xf g
1
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 24
THE REDUCED GRADIENT
We call the reduced gradient the total derivative
Geometrically is the projection of the total
derivative of f on the u-subspace of the space
We adapt the steepest descent to solve (CMP )
-
1 2
1
, , ,
T
n
T
TT T
u x u u
df df df df
du du du du
g gf f f g
x u
df
d u
u x
-
Page 13
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 25
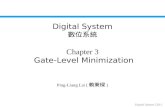
EXAMPLE: MINIMIZE ACTIVE POWER LOSSES
y13 = 4 j 10 y23 = 4 j 5
P3 + j Q3 = 2.0 - j 1.0 p.u.
P2 = 1.7 p.u.
P,V bus
reference/swing
bus
P,Q bus
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 26
VARIABLES
Control variables:
State variables:
u =V1
V2
-
Page 14
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 27
OBJECTIVE FUNCTION
We notice that P2, P3 are fixed, so any changes in
the losses will be reflected in changes in P1, so
2Reboth lines
f I R
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 28
EQUALITY CONSTRAINTS
2 2
3 3
3 3
,
( , ) ,
,
P V P
g x u P V P
Q V Q
where
The AC power flow equations for bus 2 and 3
-
Page 15
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 29
REDUCED GRADIENT METHOD
, , , ,TL x u f x u g x u
2 2
1 2
3 3
1 2
3 3
1 2
P P
V V
g P P
u V V
Q Q
V V
2 2 2
2 3 3
3 3 3
2 3 3
3 3 3
2 3 3
P P P
V
g P P P
x V
Q Q Q
V
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 30
REDUCED GRADIENT METHOD
1
T
T
u x
g gdff f
du x u
-
Page 16
ECE 573 2001 - 2013 George Gross, University of Illinois at Urbana-Champaign; All Rights Reserved 31
REDUCED GRADIENT METHOD
We pick
We solve the AC power flow and determine ,
we select a step size and iterate until
we find the solution
( )
( 1) ( )
u
dfu u
du
x(0)