







Languages
Pages
Legal

Terminologies:1) Ordinary vs. partial differential equationsAn ordinary differential equation (ODE) involves only one independent variable and contains only total differentials.
A partial differential equation (PDE) involves more than one independent variable and contains partial differentials.
2) Linear vs. nonlinear differential equationsA linear differential equation contains only terms that are linear in the dependent variable or its derivatives.
A nonlinear differential equation contains nonlinear function of the dependent variable.
1
November 7 First order differential equations
Chapter 9 Differential equations
xxyxdx
xdy4)(
)( 2
0),(),(
5),(
yxy
yxxy
x
yx
xxyxdx
xdy4)(
)( 2
ydx
xdyx
dx
xydxy
dx
xdyx
dx
xydxyx
dx
xydsin
)()( ,0)(
)()( ,0)(
)( 22
22
2
222
2
2
2
3) Order of a differential equationThe order of a differential equation is determined by the highest derivative in the equation.
4) Homogeneous vs. inhomogeneous differential equationsA linear differential equation is homogeneous if every term contains the dependent variable or its derivatives.
•A homogeneous differential equation can be written as where L is a linear differential operator.
•A homogeneous differential equation always has a trivial solution y(x) = 0.•Superposition principle: If y1(x) and y2(x) are solutions to a linear homogeneous differential equation, then ay1(x) +by2(x) is a solution to the same equation.
order second ,0)(4)()(
orderfirst ,4)()(
22
2
2
xxydx
xdyx
dx
xyd
xxyxdx
xdy
0)(4)()( 2
2
2
xxydx
xdyx
dx
xyd
,0)( xyL
xdx
dx
dx
d4 e.g., 2
2
2
L
3
An inhomogeneous differential equation has at least one term that contains no dependent variable.
•Inhomogeneous equations are often called “driven” equations. They describe the response of the system to an external force.
•The general solution to a linear inhomogeneous differential equation can be written as the sum of two parts:
Here yh(x) is the general solution of the corresponding homogeneous equation, and yp(x) is any particular solution of the inhomogeneous equation.
xxyxdx
xdy4)(
)( 2
tAxxx sin20
)()()( xyxyxy ph
4
9.2 First-order differential equations
A first-order ordinary differential equation can be generally written as
)(
)(
yQ
xP
dx
dy
I. Separable variables
If the equation has the form , then
.0),(0)()(
0)()(
yxfdyyQdxxP
dyyQdxxPyx
),(
),(
yxQ
yxP
dx
dy
cxyydyxdx
y
x
dx
dy
yx
sin20cos
cos
:1 Example
2
5
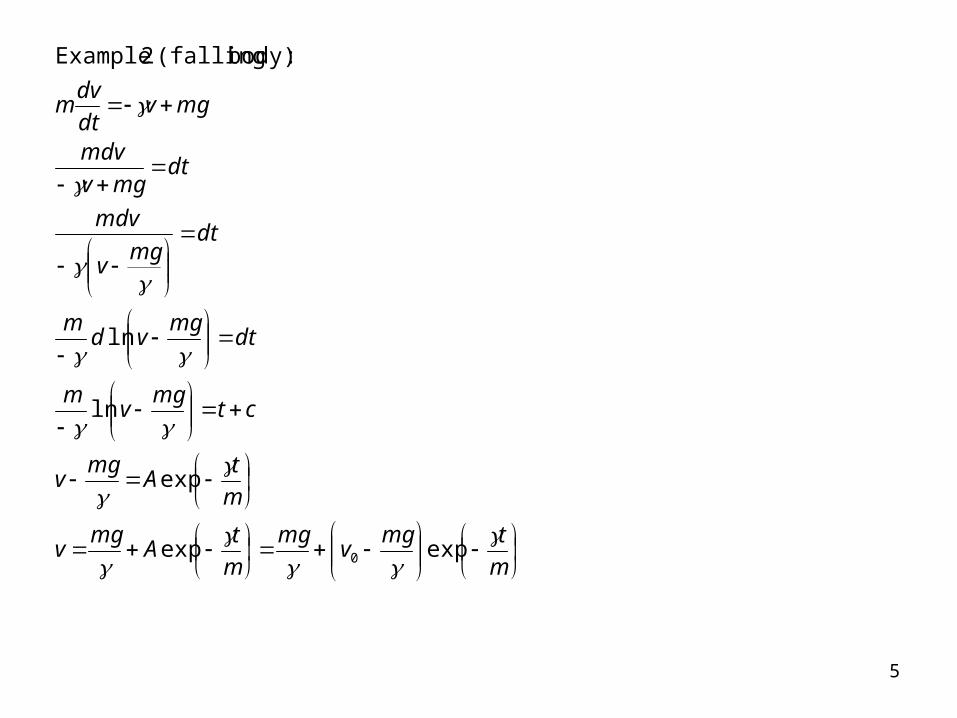
m
tmgv
mg
m
tA
mgv
m
tA
mgv
ctmg
vm
dtmg
vdm
dtmg
v
mdv
dtmgv
mdv
mgvdt
dvm
expexp
exp
ln
ln
:body) (falling 2 Example
0
6
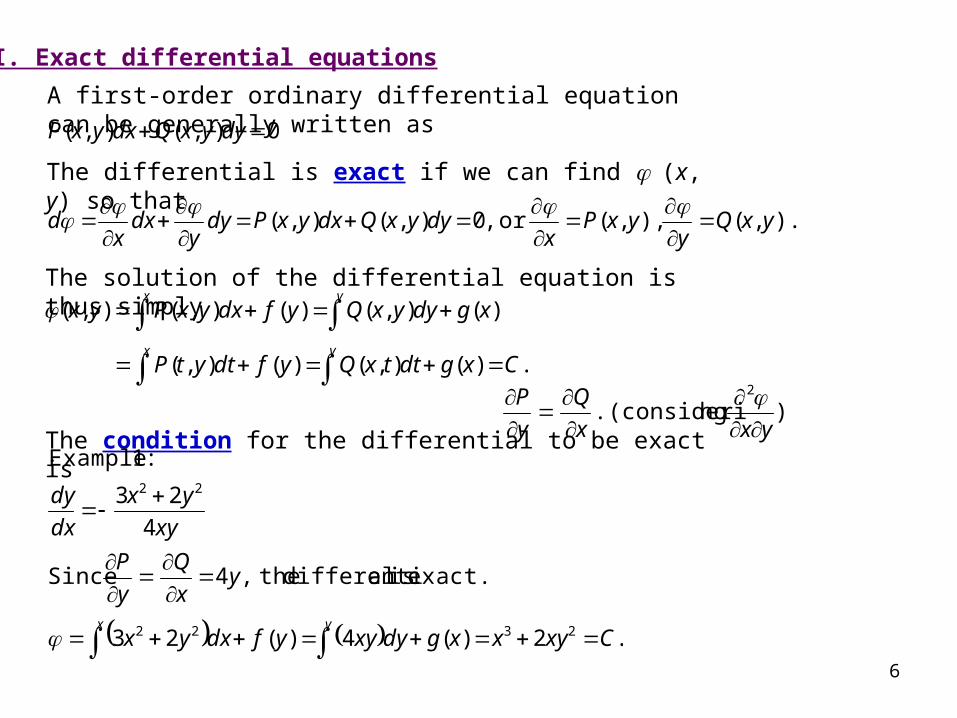
II. Exact differential equations
0),(),( dyyxQdxyxP
A first-order ordinary differential equation can be generally written as
The differential is exact if we can find (x, y) so that
).,( ),,(or ,0),(),( yxQy
yxPx
dyyxQdxyxPdyy
dxx
d
The solution of the differential equation is thus simply
The condition for the differential to be exact is
.)(),()(),(
)(),()(),(),(
yx
yx
CxgdttxQyfdtytP
xgdyyxQyfdxyxPyx
). ng(consideri . 2
yxx
Q
y
P
.2)(4)(23
exact. is aldifferenti the,4 Since
4
23
:1 Example
2322
22
Cxyxxgdyxyyfdxyx
yx
Q
y
P
xy
yx
dx
dy
yx
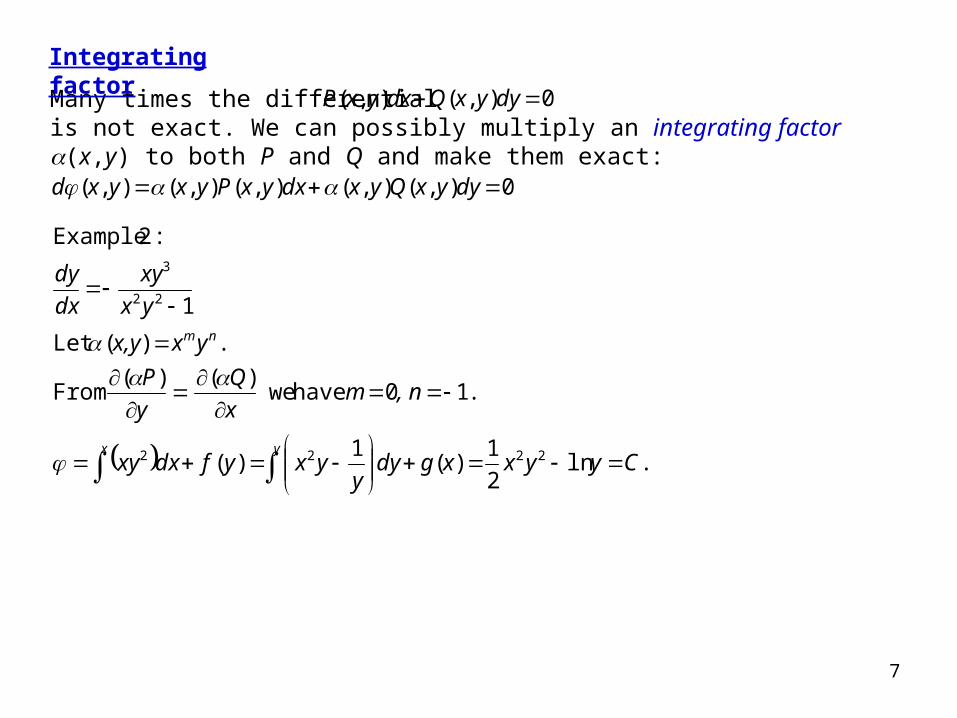
Many times the differential is not exact. We can possibly multiply an integrating factor (x,y) to both P and Q and make them exact:
7
Integrating factor
0),(),( dyyxQdxyxP
0),(),(),(),(),( dyyxQyxdxyxPyxyxd
.ln2
1)(
1)(
.10 have we)(
)(
From
.)(Let
1
:2 Example
2222
22
3
Cyyxxgdyy
yxyfdxxy
, nmx
Q
y
P
yxx,y
yx
xy
dx
dy
yx
nm
8
Read: Chapter 9: 1-2Homework: 9.2.2,9.2.3,9.2.4Due: November 18
Linear first order ODEs:
The general form of a linear first order ODE is
9
November 9, 11 Linear first order ODEs
).()( xqyxpdx
dy
9.2 First-order differential equations
Cdssqdttpdttpx
Cdttqtxy
dttqtxg
yf
xgyxxgdtx
yfdttqtydttptyfdttqytptC
dttpCxdxxpd
xpxxqyxpxdy
d
dx
d
dyxdxxqyxpxyxdx
dydxxqyxpxqyxpdx
dy
x sx
x
x
y
x xx
x
)()(exp)(exp)(
)()()(
)()()(
0)(
)()()()(
)()()()()()()()()(
)(exp)()()()()()()(
0)()()()(),( then ,factor ngintergrati thebe )(Let
0)()()()(
2
2
1
All linear first order ODEs have a formulated solution.
10
2
322
2
2
23
5
1)(
.)ln2exp(2
exp)(
2 ,2
:1 Example
x
CxCdsss
xxy
xxdtt
x
xyxdx
dyxy
dx
dyx
x
x
.2
1)(
.exp)(
:2 Example
xxx ssx
xx
x
CeeCdseeexy
edtx
eydx
dy
.)1ln(1
1)(
.11
exp)(
1
:3 Example
CxxCdss
s
sxxy
xdt
tx
x
x
x
y
dx
dy
x
x
Cdssqdttpdttpxyxqyxp
dx
dy x sx)()(exp)(exp)()()(
11
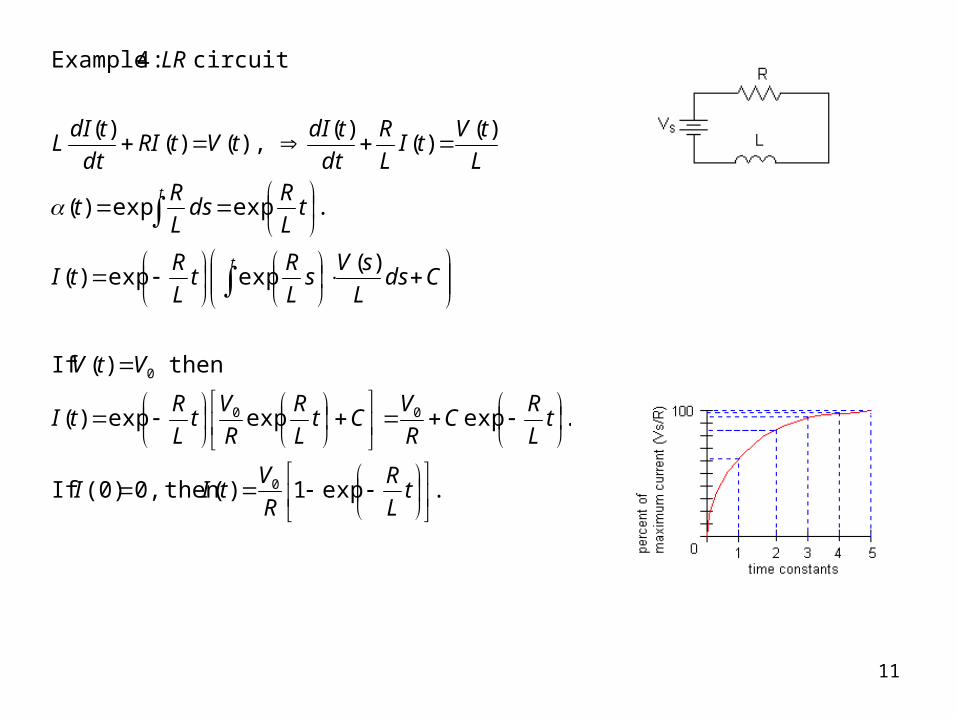
.exp1)( then 0,(0) If
.expexpexp)(
then)( If
)(expexp)(
.expexp)(
)()(
)( ),()(
)(
circuit :4 Example
0
00
0
tL
R
R
VtII
tL
RC
R
VCt
L
R
R
Vt
L
RtI
VtV
CdsL
sVs
L
Rt
L
RtI
tL
Rds
L
Rt
L
tVtI
L
R
dt
tdItVtRI
dt
tdIL
LR
t
t
12
)()( xqyxpdx
dy
)()()()(exp)(exp)(exp
)()(exp)(exp
xyxydssqdttpdttpdttpC
Cdssqdttpdttpy
ph
x sxx
x sx
Method of the variation of the constant in solving inhomogeneous ODEs:
cdssqdttpdttpxy
cdssqdttpxCxqdttpxC
xqyxpdttpxCxpdttpxCxqyxpdx
dy
dttpxCxyx
dttpCxy
yxpdx
dy
xqyxpdx
dy
x sx
x sx
xx
x
x
)()(exp)(exp)(
)()(exp)()()(exp)('
)()()(exp)()()(exp)(')()(
.)(exp)()( ,dependent beconstant n integratio Let the )2
.)(exp)(
have we,0)( equation shomogeneou ingcorrespond theSolving )1
)()( :Example
13
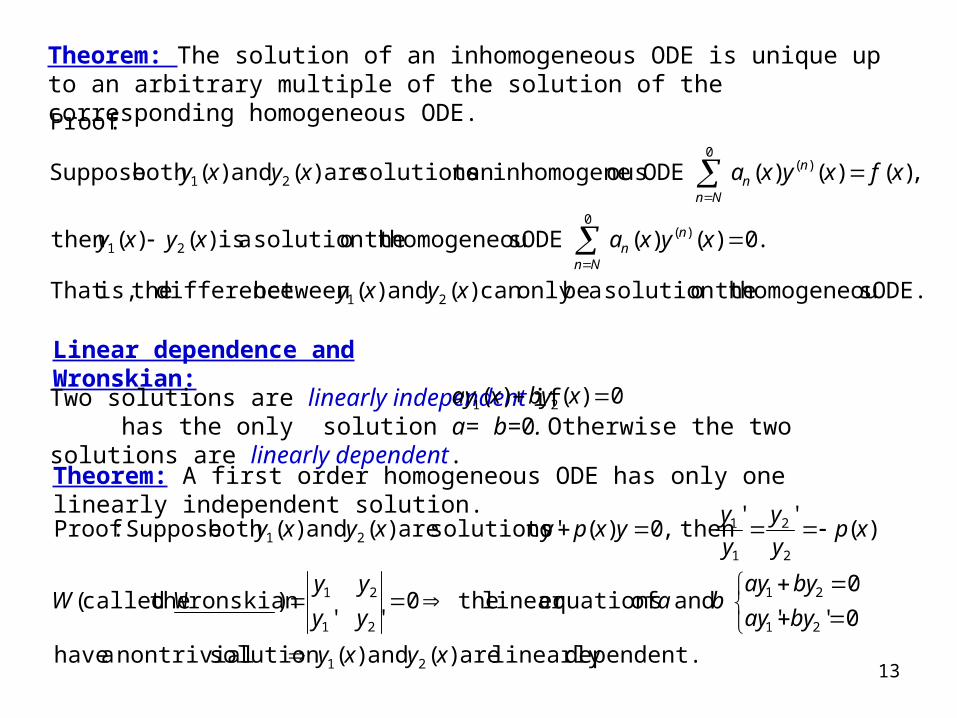
Theorem: The solution of an inhomogeneous ODE is unique up to an arbitrary multiple of the solution of the corresponding homogeneous ODE.
ODE. shomogeneou theosolution t a beonly can )( and )(between difference theis,That
.0)()( ODE shomogeneou theosolution t a is )()(then
,)()()( ODE ousinhomogenean tosolutions are )( and )(both Suppose
:Proof
21
0)(
21
0)(
21
xyxy
xyx axyxy
xfxyx axyxy
Nn
nn
Nn
nn
Linear dependence and Wronskian:
Two solutions are linearly independent if has the only solution a= b=0. Otherwise the two solutions are linearly dependent.
0)()( 21 xbyxay
Theorem: A first order homogeneous ODE has only one linearly independent solution.
dependent.linearly are )( and )(solution nontrivial a have
0''
0 and of equationslinear the0
'')Wronskian thecalled(
).(''
then ,0)(' tosolutions are )( and )(both Suppose :Proof
21
21
21
21
21
2
2
1
121
xyxy
byay
byayba
yy
yyW
xpy
y
y
yyxpyxyxy
14
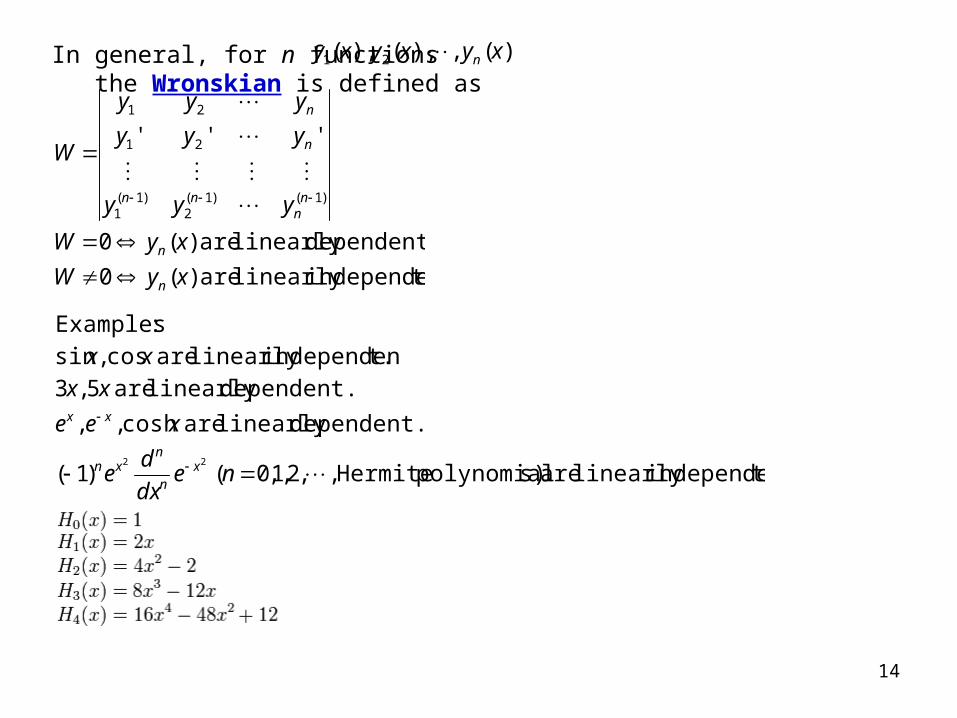
In general, for n functions the Wronskian is defined as ),( , ),( ),( 21 xyxyxy n
t.independenlinearly are )(0
dependent,linearly are )(0
'''
)1()1(2
)1(1
21
21
xyW
xyW
yyy
yyy
yyy
W
n
n
nn
nn
n
n
t.independenlinearly are s)polynomial Hermite,,2,1,0( )1(
dependent.linearly are cosh, ,
dependent.linearly are 5 ,3
t.independenlinearly are cos ,sin
:Examples
22
nedx
de
xee
xx
xx
xn
nxn
xx
15
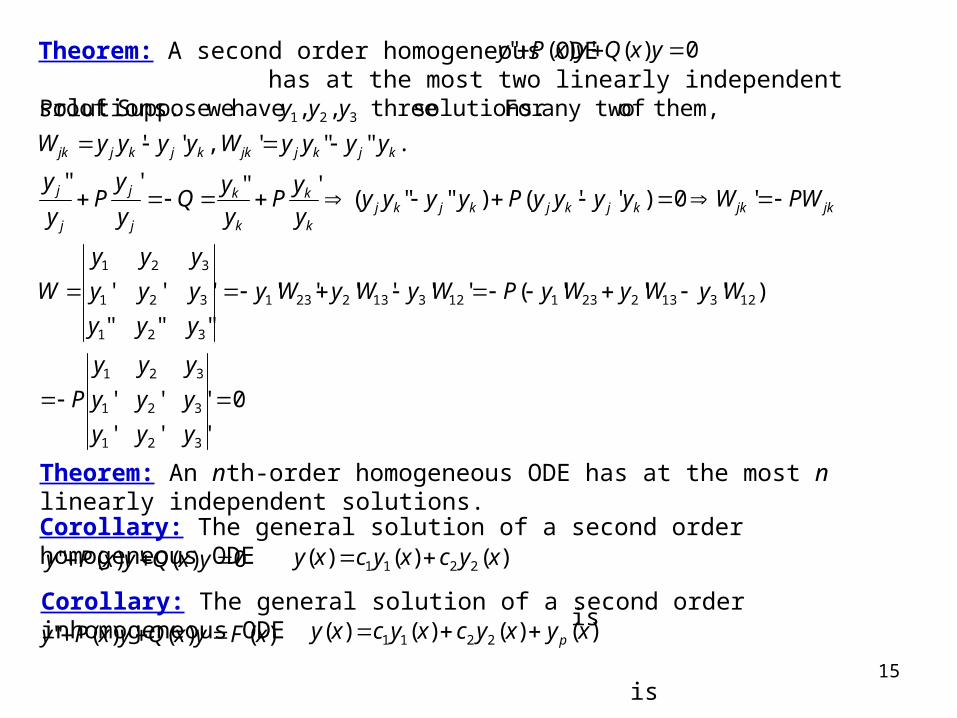
Theorem: A second order homogeneous ODE has at the most two linearly independent solutions.
0
'''
'''
)'''(''''''
"""
'''
'0)''()""('"'"
.""' ,''
them,of any twoFor solutions. three,, have weSuppose :Proof
321
321
321
123132231123132231
321
321
321
321
yyy
yyy
yyy
P
WyWyWyPWyWyWy
yyy
yyy
yyy
W
PWWyyyyPyyyyy
yP
y
yQ
y
yP
y
y
yyyyWyyyyW
yyy
jkjkkjkjkjkjk
k
k
k
j
j
j
j
kjkjjkkjkjjk
0)(')(" yxQyxPy
Corollary: The general solution of a second order homogeneous ODE is
).()()( 2211 xycxycxy 0)(')(" yxQyxPy
)()(')(" xFyxQyxPy Corollary: The general solution of a second order inhomogeneous ODE is
).()()()( 2211 xyxycxycxy p
Theorem: An nth-order homogeneous ODE has at the most n linearly independent solutions.
16
Read: Chapter 9: 2Homework: 9.2.11,9.2.13,9.2.14Due: November 18
17
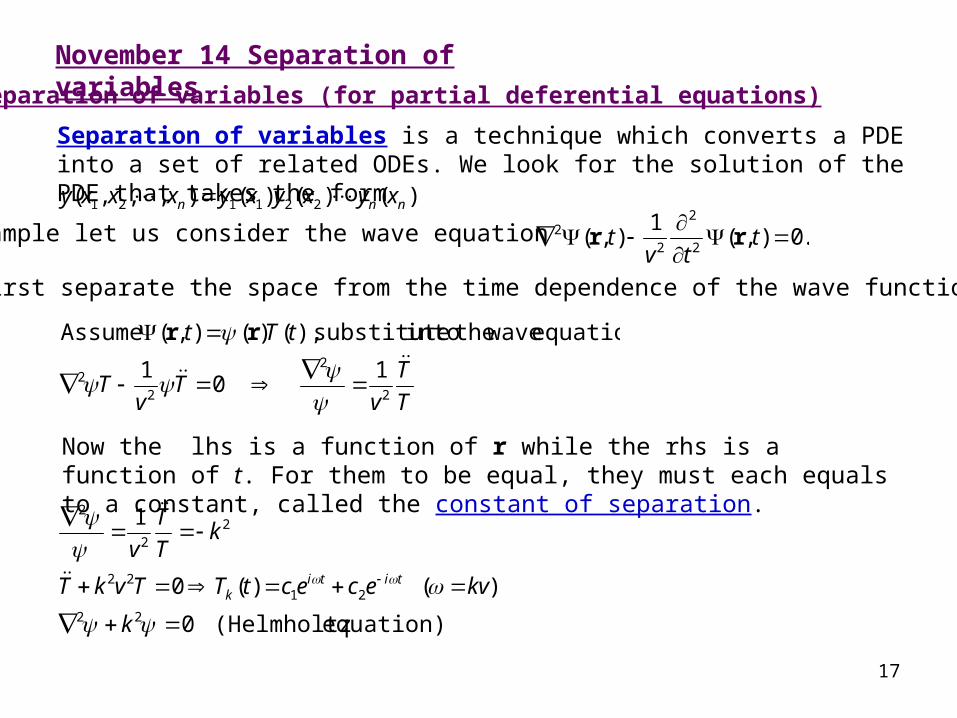
November 14 Separation of variables
9.3 Separation of variables (for partial deferential equations)
Separation of variables is a technique which converts a PDE into a set of related ODEs. We look for the solution of the PDE that takes the form
).()()( ),,,( 221121 nnn xyxyxyxxxy
As an example let us consider the wave equation
Let us first separate the space from the time dependence of the wave function.
.0),(1
),(2
2
22
ttv
t rr
T
T
vT
vT
tTt
2
2
22 1
01
equation, wave theinto substitute ),()(),( Assume
rr
Now the lhs is a function of r while the rhs is a function of t. For them to be equal, they must each equals to a constant, called the constant of separation.
equation) (Helmholtz 0
)( )(0
1
22
2122
22
2
k
kvecectTTvkT
kT
T
vtiti
k
18
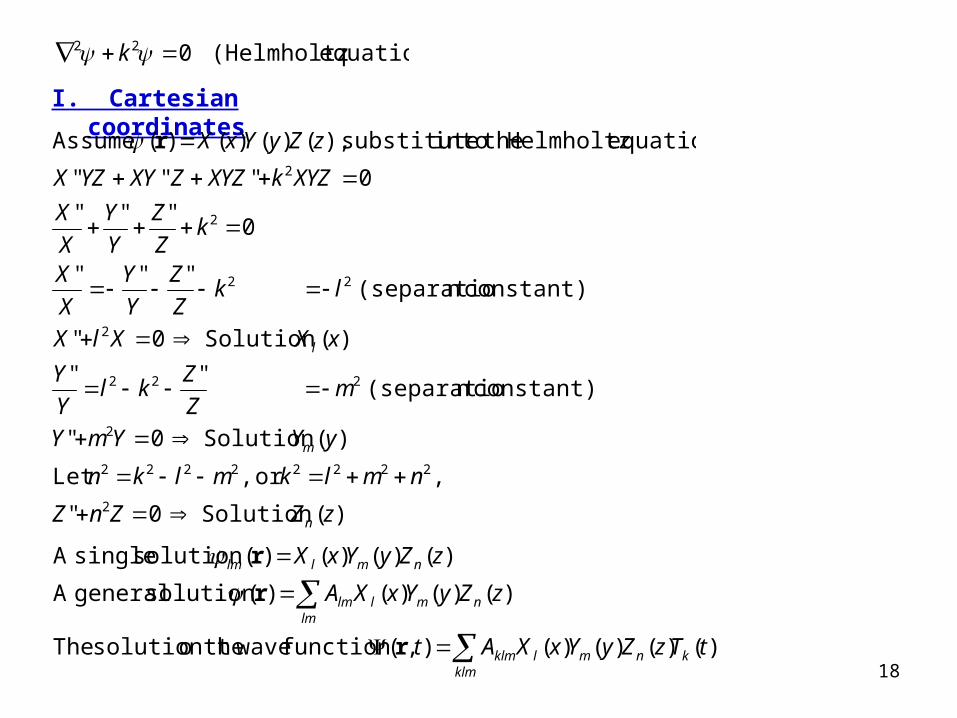
equation) (Helmholtz 022 k
I. Cartesian coordinates
)(Solution 0"
,or ,Let
)(Solution 0"
constant)n (separatio ""
)(Solution 0"
constant)n (separatio """
0"""
0"""
equation, Helmholtz theinto substitute ),()()()( Assume
2
22222222
2
222
2
22
2
2
zZZnZ
nmlkmlkn
yYYmY
mZ
Zkl
Y
Y
xXXlX
lkZ
Z
Y
Y
X
X
kZ
Z
Y
Y
X
X
XYZkXYZZXYYZX
zZyYxX
n
m
l
r
).()()()(),(function wave theosolution t The
)()()()(solution generalA
)()()()(solution singleA
tTzZyYxXAt
zZyYxXA
zZyYxX
kklm
nmlklm
lmnmllm
nmllm
r
r
r
19
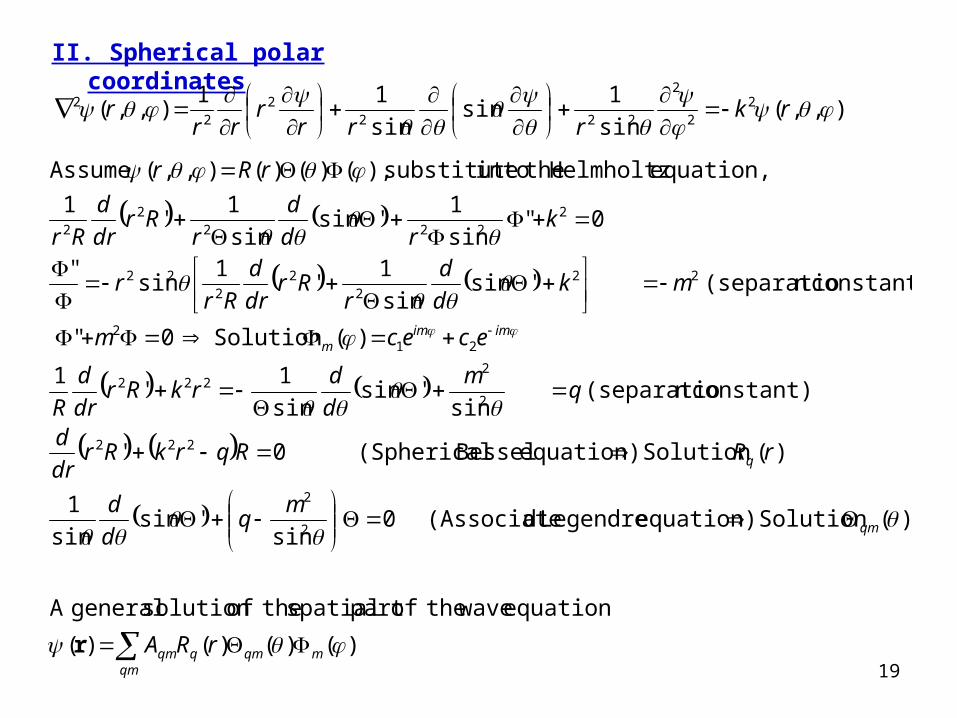
II. Spherical polar coordinates
),,(sin
1sin
sin
11),,( 2
2
2
2222
22
rk
rrrr
rrr
qmmqmqqm
qm
q
imimm
rRA
mq
d
d
rRRqrkRrdr
d
qm
d
drkRr
dr
d
R
ececm
mkd
d
rRr
dr
d
Rrr
krd
d
rRr
dr
d
Rr
rRr
)()()()(
equation wave theofpart spatial theofsolution generalA
)(Solution equation) Legendre d(Associate 0 sin
'sinsin
1
)(Solution equation) Bessel (Spherical 0'
constant)n (separatio sin
'sinsin
1'
1
)(Solution 0"
constant)n (separatio 'sinsin
1'
1sin
"
0"sin
1'sin
sin
1'
1
equation, Helmholtz theinto substitute ),()()(),,( Assume
2
2
222
2
2222
212
222
22
22
2222
22
r
20
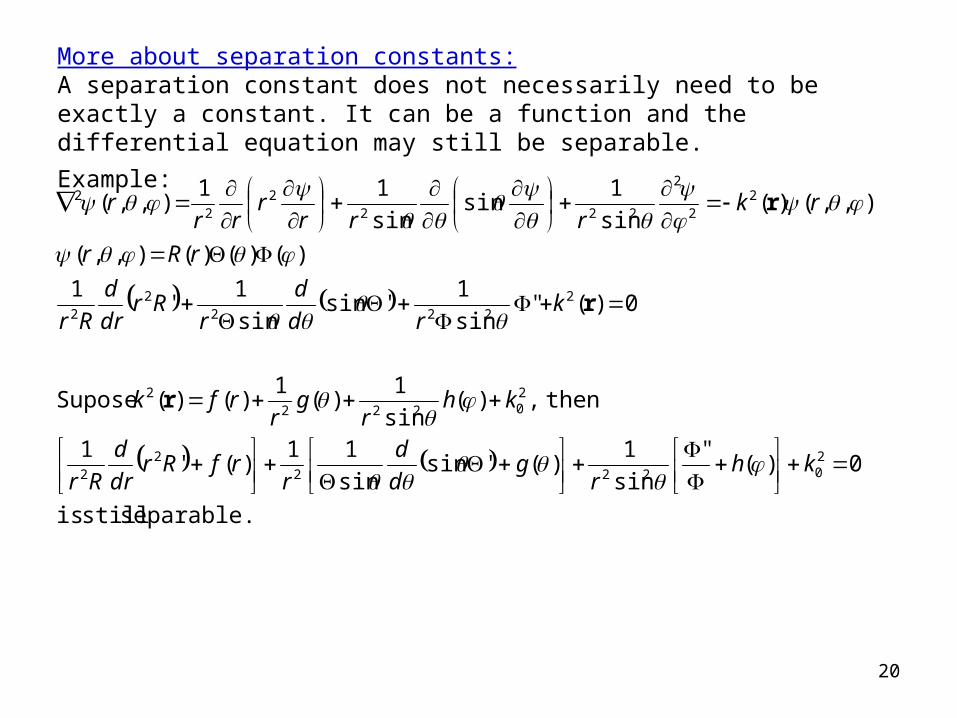
More about separation constants:A separation constant does not necessarily need to be exactly a constant. It can be a function and the differential equation may still be separable.
Example:
separable. still is
0)("
sin
1)('sin
sin
11)('
1
then,)(sin
1)(
1)()( Supose
0)("sin
1'sin
sin
1'
1
)()()(),,(
),,()(sin
1sin
sin
11),,(
20222
22
20222
2
2222
22
22
2
2222
22
khr
gd
d
rrfRr
dr
d
Rr
khr
gr
rfk
krd
d
rRr
dr
d
Rr
rRr
rkrrr
rrr
r
r
r
r
21
Read: Chapter 9: 3Homework: 9.3.4,9.3.9Due: December 2
22
November 16,18 Series solution
9.4 Singular points
Before we learn the series solution of differential equations, it is necessary to understand the singular points of differential equations. This is because singular points can possibly cause trouble when a series solution is attempted.We consider a point x = x0 for a second-order homogeneous differential equation
0)(')(" yxQyxPy
1. If P(x) and Q(x) are both finite at x = x0, then x = x0 is an ordinary point. 2. If either P(x) or Q(x) is infinite at x = x0, then x = x0 is a singular point. 1) If both (x-x0)P(x) and (x-x0)2Q(x) are finite as xx0, then x = x0 is a regular singular
point. 2) If either (x-x0)P(x) or (x-x0)2Q(x) is infinite as xx0, then x = x0 is an irregular
(essential) singular point.
It can be shown that at an ordinary point or a regular singular point, it is possible to use the series solution approach. However, at an essential singular point the series solution method will most likely fail.
23
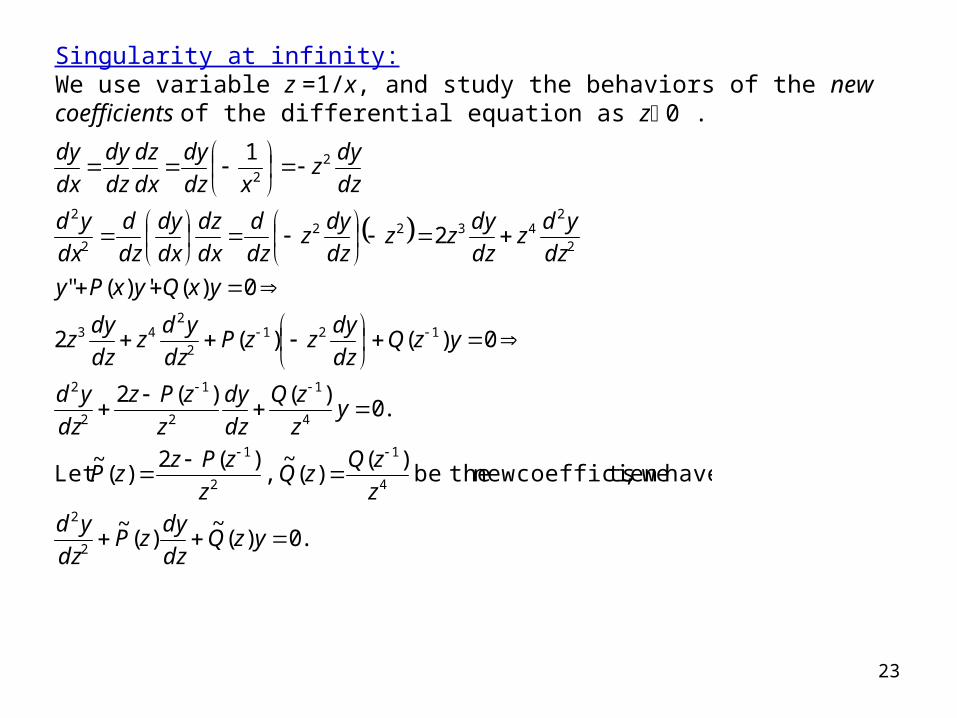
Singularity at infinity:We use variable z =1/x, and study the behaviors of the new coefficients of the differential equation as z 0 .
.0)(~
)(~
have we,tscoefficien new thebe )(
)(~
,)(2
)(~
Let
.0)()(2
0)()(2
0)(')("
2
1
2
2
4
1
2
1
4
1
2
1
2
2
1212
243
2
24322
2
2
22
yzQdz
dyzP
dz
yd
z
zQzQ
z
zPzzP
yz
zQ
dz
dy
z
zPz
dz
yd
yzQdz
dyzzP
dz
ydz
dz
dyz
yxQyxPy
dz
ydz
dz
dyzz
dz
dyz
dz
d
dx
dz
dx
dy
dz
d
dx
yd
dz
dyz
xdz
dy
dx
dz
dz
dy
dx
dy
24
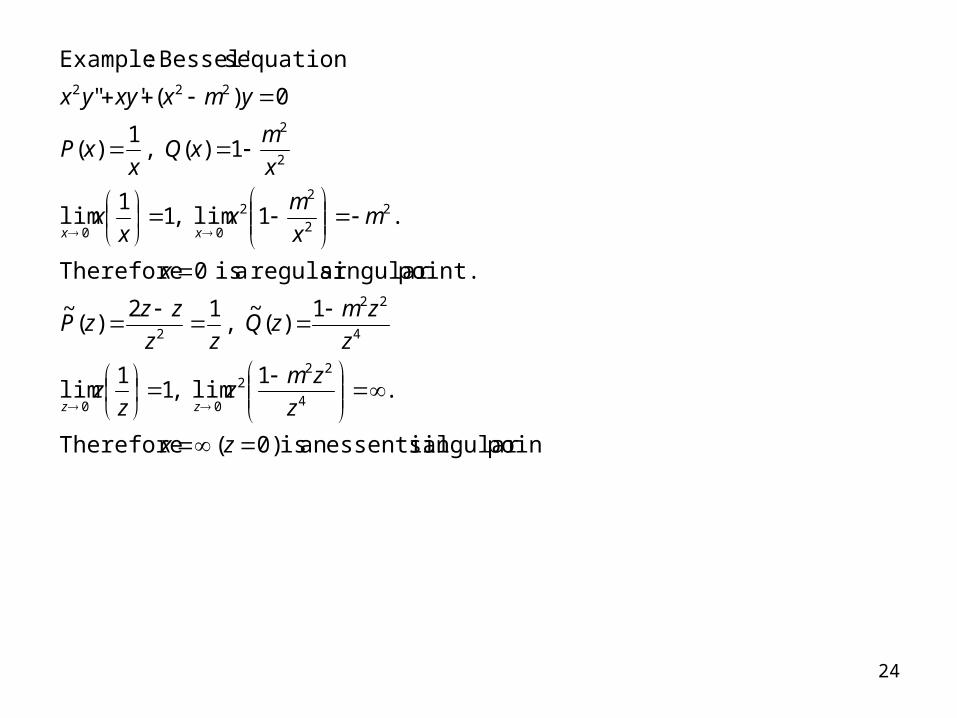
point.singular essentialan is 0)( Therefore
.1
lim ,11
lim
1)(
~ ,
12)(
~
point.singular regular a is 0 Therefore
.1lim ,11
lim
1)( ,1
)(
0)('"
equation sBessel' :Example
4
222
00
4
22
2
22
22
00
2
2
222
zx
z
zmz
zz
z
zmzQ
zz
zzzP
x
mx
mx
xx
x
mxQ
xxP
ymxxyyx
zz
xx
25
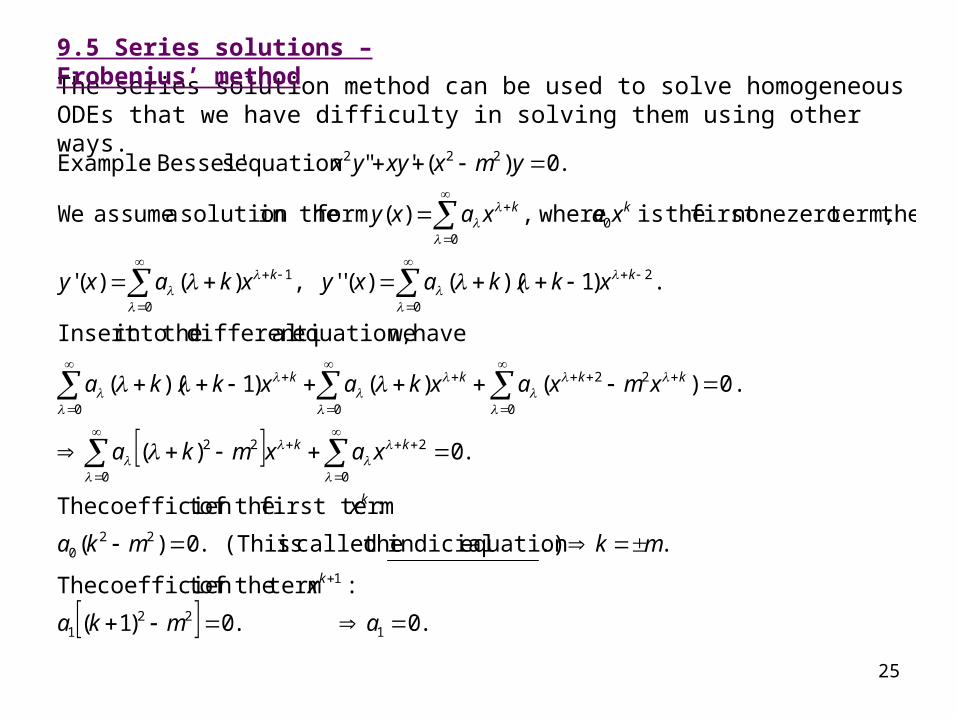
The series solution method can be used to solve homogeneous ODEs that we have difficulty in solving them using other ways.
9.5 Series solutions – Frobenius’ method
.0 .0)1(
: term theoft coefficien The
. .)equation indicial thecalled is (This .0)(
: first term theoft coefficien The
.0)(
0.)( )()1)((
have weequation, aldifferenti theintoInsert
.)1)(()('' ,)()('
then term,nonezerofirst theis where,)( form in thesolution a assume We
.0)('" equation sBessel' :Example
122
1
1
220
0
2
0
22
0 0
22
0
0
2
0
1
00
222
amka
x
mkmka
x
xaxmka
xmxaxkaxkka
xkkaxyxkaxy
xaxaxy
ymxxyyx
k
k
kk
kkkk
kk
kk
26
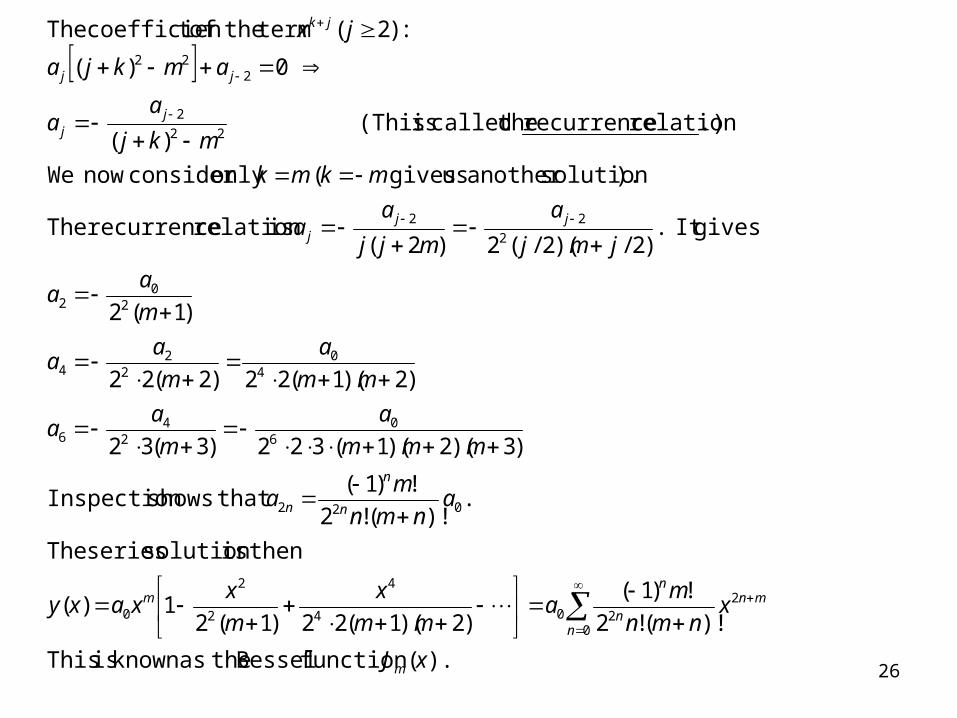
).(function Bessel theasknown is This
)!(!2
!)1(
)2)(1(22)1(21)(
thenissolution series The
.)!(!2
!)1( that shows Inspection
)3)(2)(1(322)3(32
)2)(1(22)2(22
)1(2
givesIt .)2/)(2/(2)2(
isrelation recurrence The
).solutionanother us gives ( only consider now We
.)relation recurrence thecalled is (This )(
0)(
:)2( term theoft coefficien The
0
2204
4
2
2
0
022
60
24
6
40
22
4
20
2
2
22
22
2
222
xJ
xnmn
ma
mm
x
m
xxaxy
anmn
ma
mmm
a
m
aa
mm
a
m
aa
m
aa
jmj
a
mjj
aa
mkmk
mkj
aa
amkja
jx
m
n
mnn
nm
n
n
n
jjj
jj
jj
jk
27
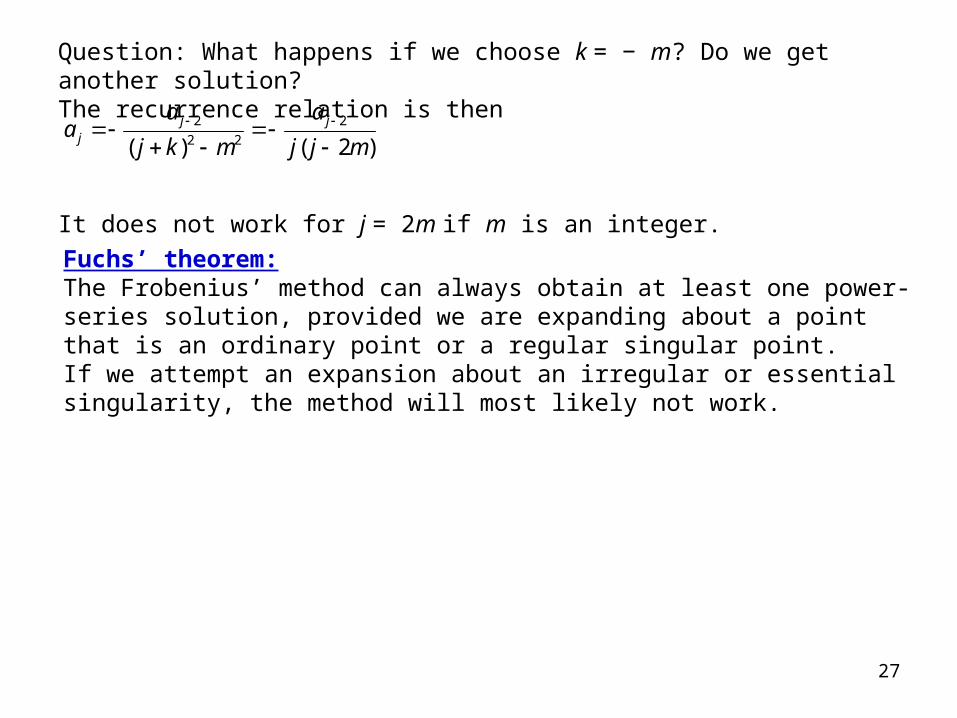
Question: What happens if we choose k = − m? Do we get another solution?The recurrence relation is then
It does not work for j = 2m if m is an integer.
)2()(2
22
2
mjj
a
mkj
aa jj
j
Fuchs’ theorem:The Frobenius’ method can always obtain at least one power-series solution, provided we are expanding about a point that is an ordinary point or a regular singular point.If we attempt an expansion about an irregular or essential singularity, the method will most likely not work.
28
Read: Chapter 9: 4-5Homework: 9.4.1,9.4.2,9.5.6(a),9.5.16Due: December 2
29
November 28 A second solution
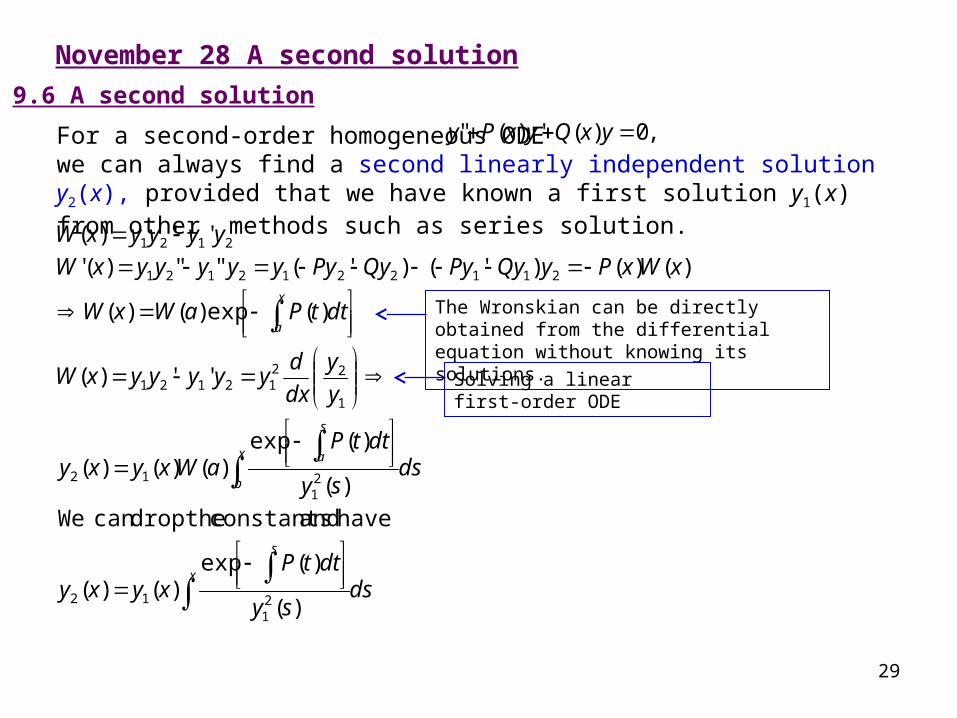
9.6 A second solution
For a second-order homogeneous ODE we can always find a second linearly independent solution y2(x), provided that we have known a first solution y1(x) from other methods such as series solution.
,0)(')(" yxQyxPy
dssy
dttPxyxy
dssy
dttPaWxyxy
y
y
dx
dyyyyyxW
dttPaWxW
xWxPyQyPyQyPyyyyyyxW
yyyyxW
x
s
x
b
s
a
x
a
)(
)(exp)()(
have and constants thedropcan We
)(
)(exp)()()(
'')(
)(exp)()(
)()()'()'("")('
'')(
21
12
21
12
1
2212121
2112212121
2121
The Wronskian can be directly obtained from the differential equation without knowing its solutions.
Solving a linear first-order ODE
30
.cossin
cossin
sin
1sin
)(
)(exp)()(
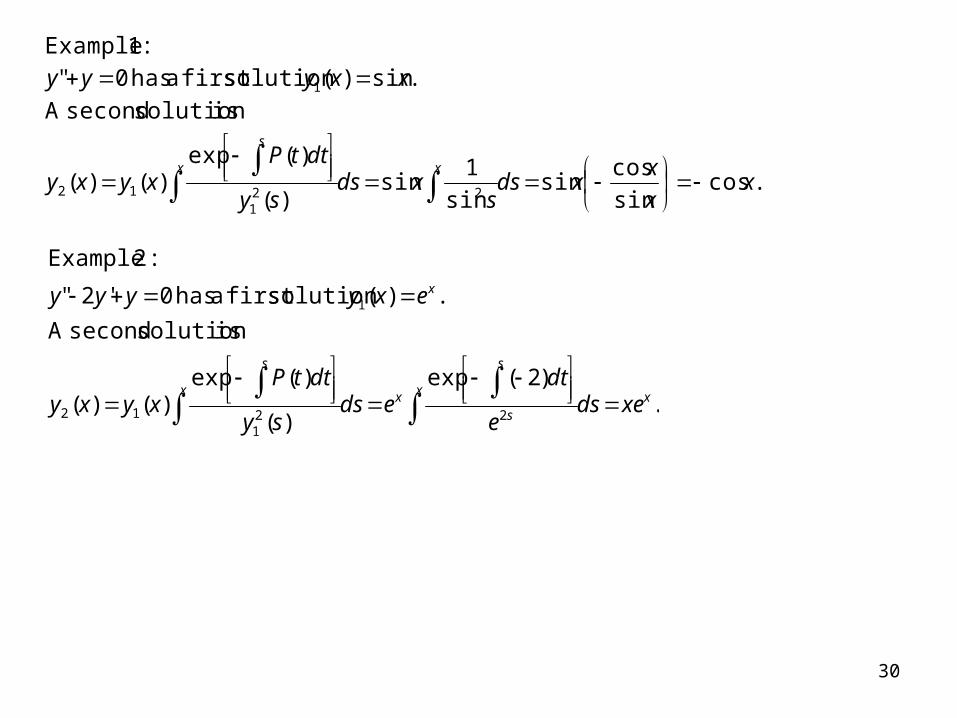
issolution secondA
.sin)(solution first a has 0"
:1 Example
221
12
1
xx
xxds
sxds
sy
dttPxyxy
xxyyy
xx
s
.)2(exp
)(
)(exp)()(
issolution secondA
.)(solution first a has 0'2"
:2 Example
221
12
1
xx
s
s
xx
s
x
xedse
dteds
sy
dttPxyxy
exyyyy
31
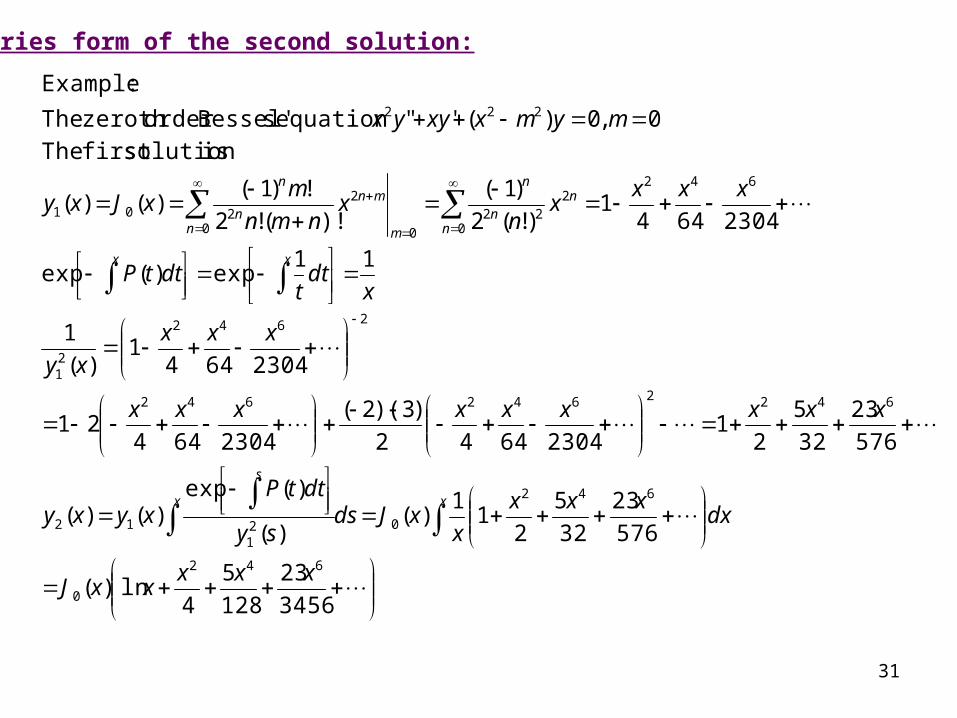
Series form of the second solution:
3456
23
128
5
4ln)(
576
23
32
5
21
1)(
)(
)(exp)()(
576
23
32
5
21
23046442
)3)(2(
230464421
23046441
)(
1
11exp)(exp
23046441
)!(2
)1(
)!(!2
!)1()()(
issolution first The
0 ,0)('" equation sBessel'order zeroth The
:Example
642
0
642
021
12
6422642642
2642
21
642
0
222
00
2201
222
xxxxxJ
dxxxx
xxJds
sy
dttPxyxy
xxxxxxxxx
xxx
xy
xdt
tdttP
xxxx
nx
nmn
mxJxy
mymxxyyx
xx
s
xx
n
nn
n
mn
mnn
n
32
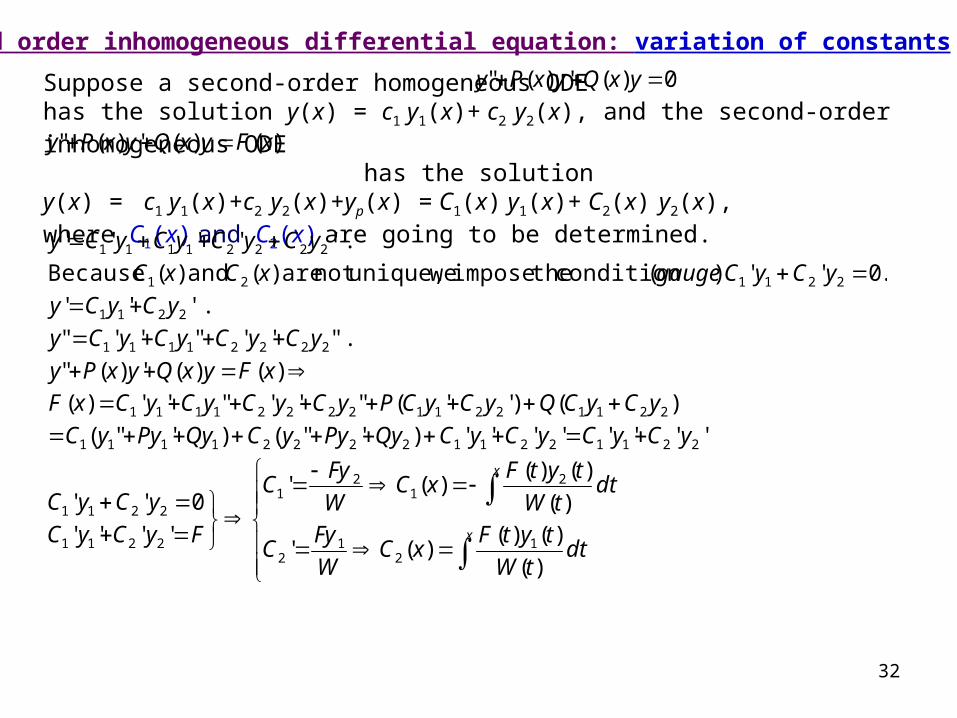
Second order inhomogeneous differential equation: variation of constants
Suppose a second-order homogeneous ODE has the solution y(x) = c1 y1(x)+ c2 y2(x), and the second-order inhomogeneous ODE
has the solutiony(x) = c1 y1(x)+c2 y2(x)+yp(x) = C1(x) y1(x)+ C2(x) y2(x),where C1(x) and C2(x) are going to be determined.
0)(')(" yxQyxPy
)()(')(" xFyxQyxPy
x
x
dttW
tytFxC
W
FyC
dttW
tytFxC
W
FyC
FyCyC
yCyC
yCyCyCyCQyPyyCQyPyyC
yCyCQyCyCPyCyCyCyCxF
xFyxQyxPy
yCyCyCyCy
yCyCy
yCyCgaugexCxC
yCyCyCyCy
)(
)()()('
)(
)()()('
''''
0''
'''''''')'"()'"(
)()''("''"'')(
)()(')("
".''"''"
'.''
.0'' )(condition theimpose weunique,not are )( and )( Because
'.''''
12
12
21
21
2211
2211
2211221122221111
2211221122221111
22221111
2211
221121
22221111
33
Read: Chapter 9: 6Homework: 9.6.6,9.6.9,9.6.15,9.6.19Due: December 9
34
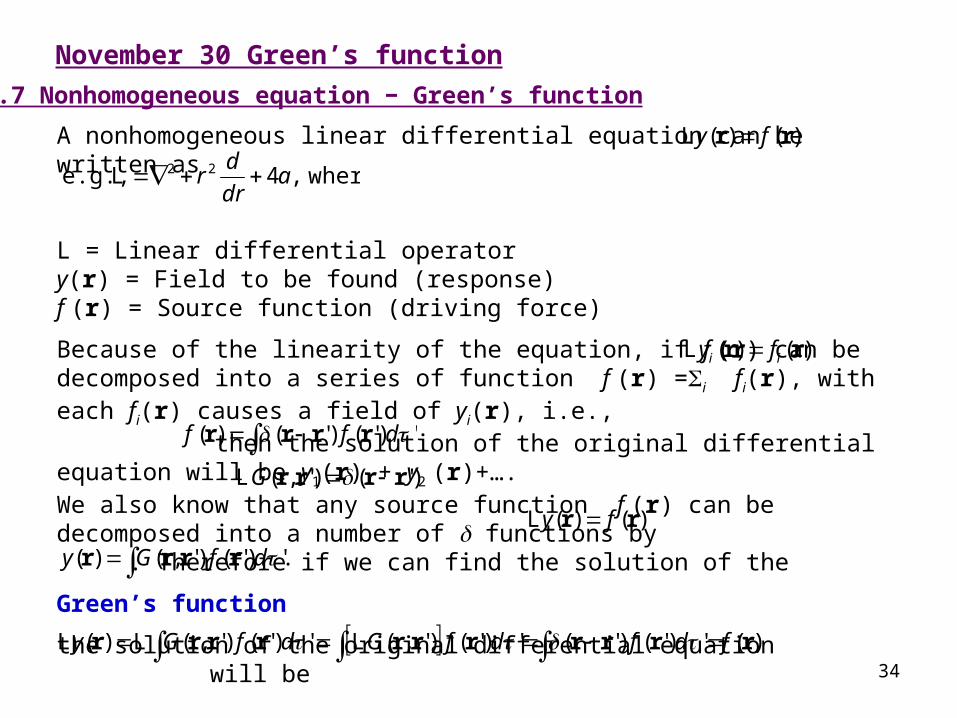
November 30 Green’s function
9.7 Nonhomogeneous equation − Green’s function
A nonhomogeneous linear differential equation can be written as
L = Linear differential operatory(r) = Field to be found (response)f (r) = Source function (driving force)
Because of the linearity of the equation, if f (r) can be decomposed into a series of function f (r) =i fi(r), with each fi(r) causes a field of yi(r), i.e., then the solution of the original differential equation will be y1(r) + y2 (r)+….We also know that any source function f (r) can be decomposed into a number of functions by . Therefore if we can find the solution of the
Green’s function
the solution of the original differential equation will be
Proof:
),()( rr fy L
where,4 e.g., 22 adr
dr L
')'()'()( dff rrrr
),'()',( rrrr GL
.')'()',()( dfGy rrrr
)()( rr fy L
).(')'()'(')'()',(')'()',()( rrrrrrrrrrr fdfdfGdfGy LLL
),()( rr ii fy L
35
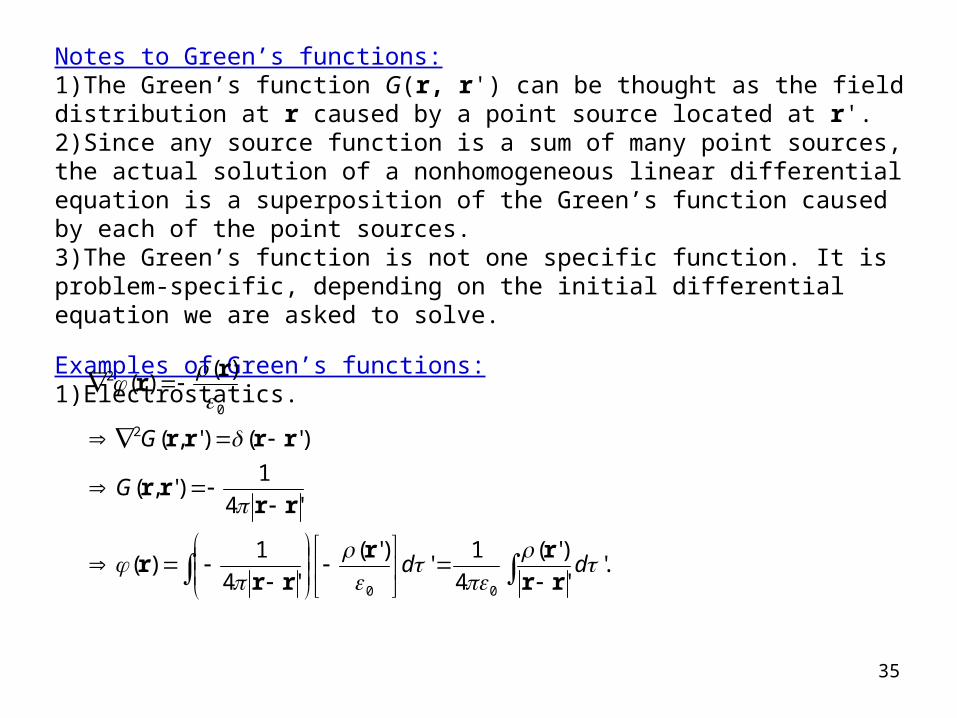
Notes to Green’s functions:1)The Green’s function G(r, r') can be thought as the field distribution at r caused by a point source located at r'.2)Since any source function is a sum of many point sources, the actual solution of a nonhomogeneous linear differential equation is a superposition of the Green’s function caused by each of the point sources.3)The Green’s function is not one specific function. It is problem-specific, depending on the initial differential equation we are asked to solve.
Examples of Green’s functions:1)Electrostatics.
.''
)'(
4
1'
)'(
'4
1)(
'4
1)',(
)'()',(
)()(
00
2
0
2
dd
G
G
rr
rr
rrr
rrrr
rrrr
rr
36
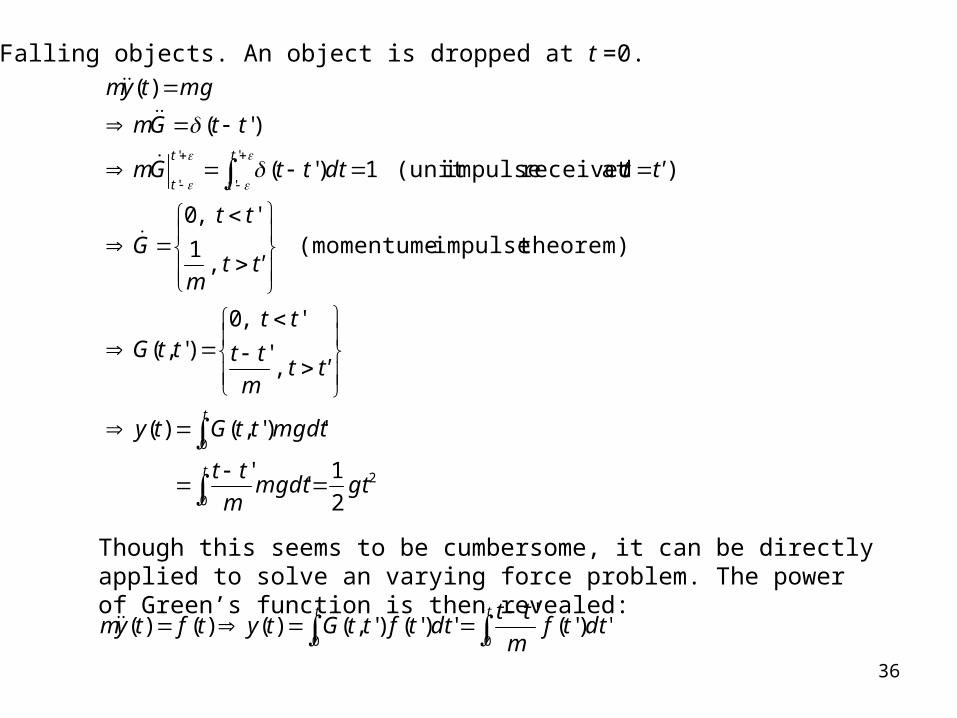
2) Falling objects. An object is dropped at t =0.
2
0
0
'
'
'
'
2
1'
'
')',()(
,'
' ,0)',(
theorem)impulse-(momentume ,
1
' ,0
)at received impulse(unit 1)'(
)'(
)(
gtmgdtm
tt
mgdtttGty
t'tm
tt
ttttG
t'tm
ttG
t'tdtttGm
ttGm
mgtym
t
t
t
t
t
t
Though this seems to be cumbersome, it can be directly applied to solve an varying force problem. The power of Green’s function is then revealed:
tt
dttfm
ttdttfttGtytftym
00')'(
'')'()',()()()(
37
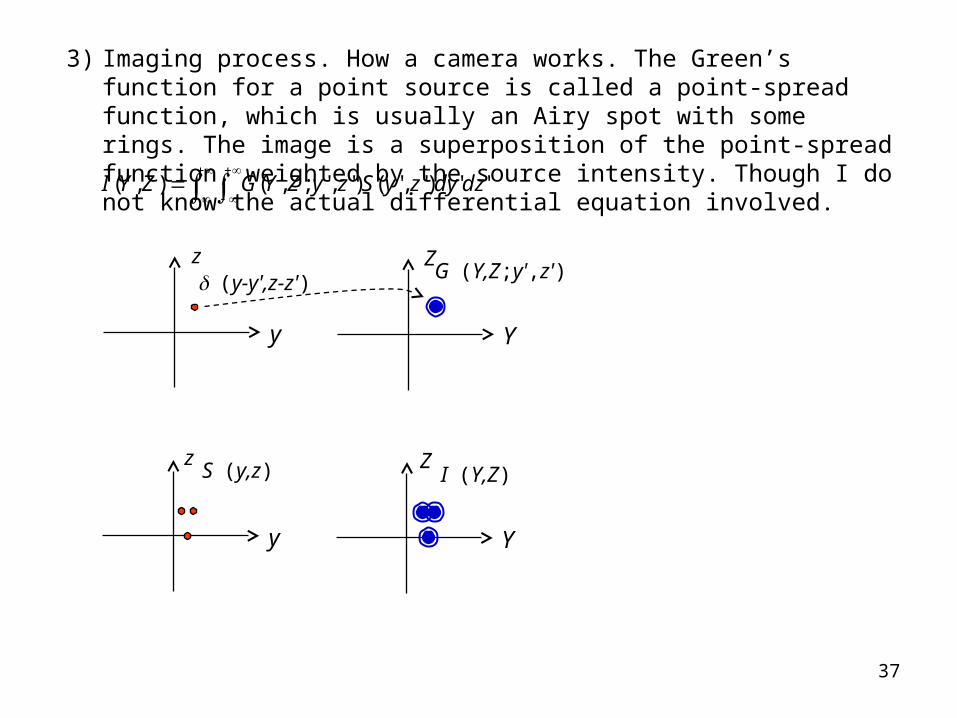
3) Imaging process. How a camera works. The Green’s function for a point source is called a point-spread function, which is usually an Airy spot with some rings. The image is a superposition of the point-spread function, weighted by the source intensity. Though I do not know the actual differential equation involved.
'')','()',';,(),( dzdyzySzyZYGZYI
y
(y-y',z-z')z
Y
G(Y,Z;y',z')Z
y
S(y,z)z
Y
I(Y,Z)Z
38
Read: Chapter 9: 7Homework: 9.7.5,6,15Due: December 9
39
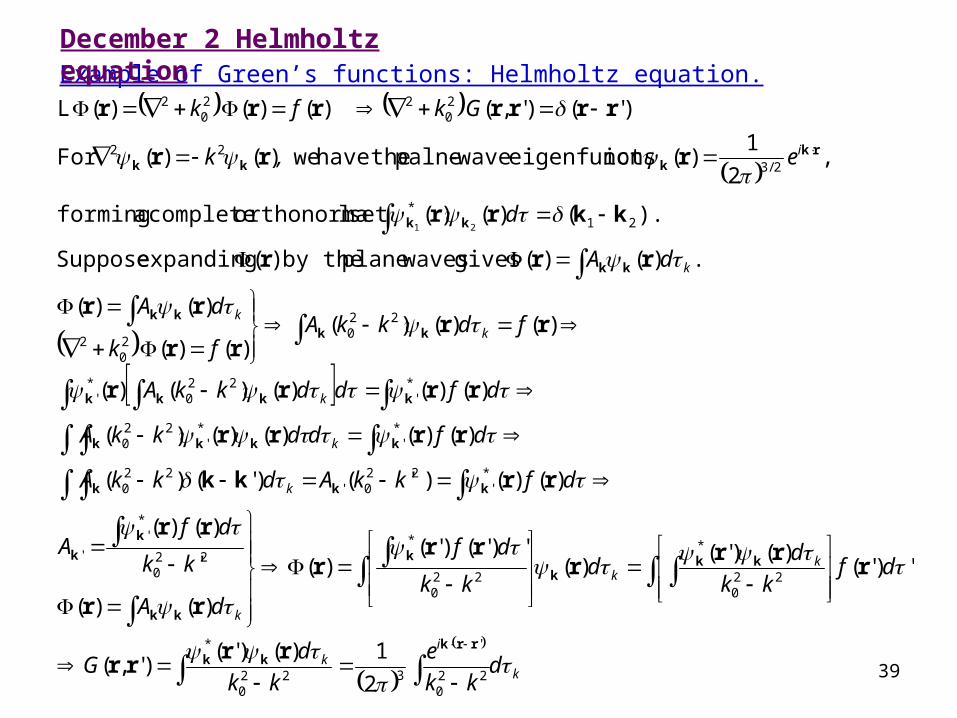
Example of Green’s functions: Helmholtz equation.
k
ik
kk
k
k
k
k
k
k
k
i
dkk
e
kk
dG
dfkk
dd
kk
df
dA
kk
dfA
dfkkAdkkA
dfddkkA
dfddkkA
fdkkAfk
dA
dA
d
e,k
Gkfk
220
'
3220
*
220
*
220
*22
0
*'
'
*'
220'
220
*'
*'
220
*'
220
*'
220
20
2
21*
2/322
20
220
2
2
1)()'()',(
')'()()'(
)(')'()'(
)(
)()(
'
)()(
)()()'()'()(
)()()()()(
)()()()()(
)()()()()(
)()(
.)()( gives wavesplane by the )( expanding Suppose
).()()(set lorthonorma complete a forming
,2
1)( ionseigenfunct wave-palne thehave we)()(For
)'()',( )()( )(
21
rrkkk
kkk
k
kk
k
k
kkk
kkkk
kkkk
kk
kk
kk
kk
rkkkk
rrrr
rrr
rrr
r
rr
rr
rrkk
rrrr
rrrr
rrrr
rr
rrr
kkrr
rrr
rrrrrrrL
December 2 Helmholtz equation
40
k
ik
k
kk
k
k
k
i
dkk
e
kk
dG
dBG
kkB
ddkkBGk
dBG
dBGG
d
e,k
220
'
3220
*22
0
*
*220
20
2
*
2/322
2
1)()'()',(
)()',(
)'(
)()'()'()()()'()',(
)()',(
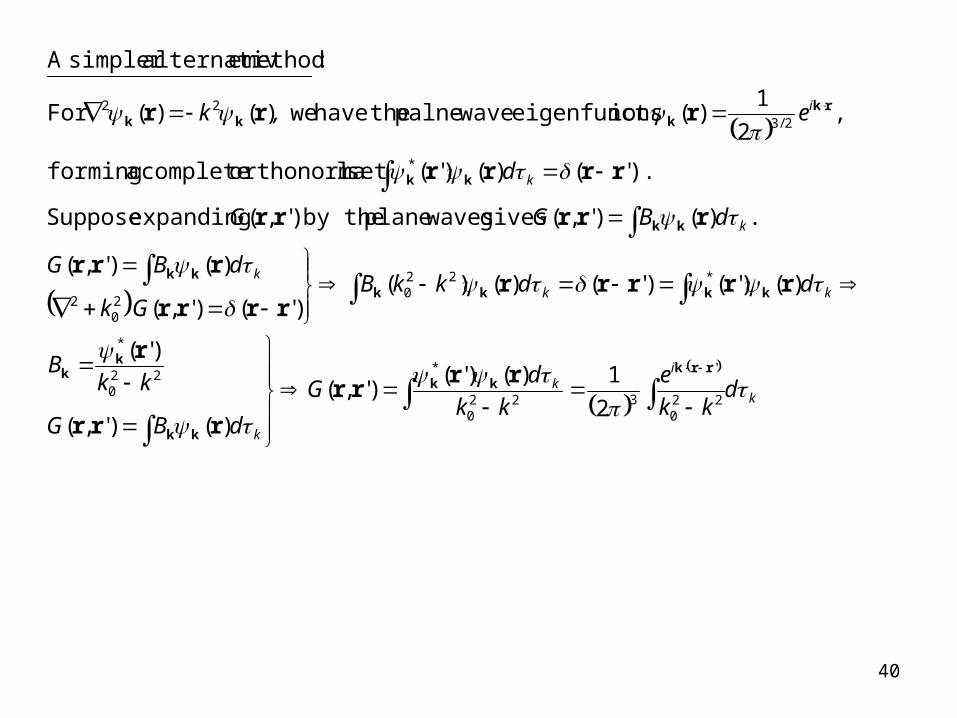
.)()',( gives wavesplane by the )',( expanding Suppose
).'()()'(set lorthonorma complete a forming
,2
1)( ionseigenfunct wave-palne thehave we)()(For
:method ealternativsimpler A
rrkkk
kk
kk
kkkk
kk
kk
kk
rkkkk
rrrr
rrr
r
rrrrrrrrr
rrr
rrrrr
rrrr
rrr
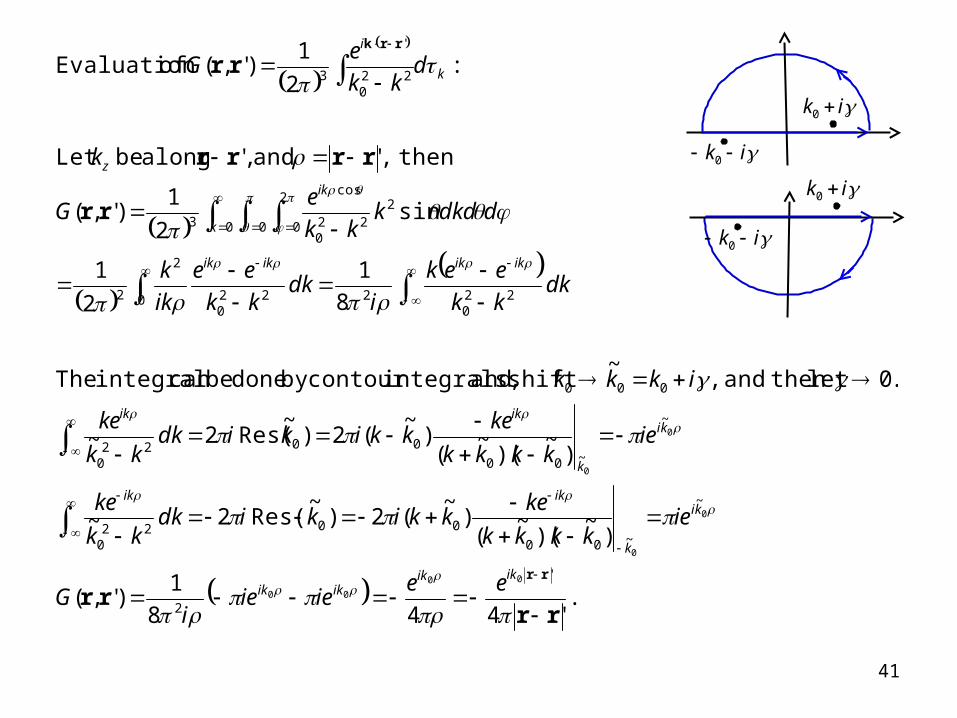
.'448
1)',(
)~
)(~
()
~(2)
~Res( 2~
)~
)(~
()
~(2)
~Res( 2~
.0let then and ,~
shift and integrals,contour by done becan integral The
8
1
2
1
sin2
1)',(
then,' and ,' along be Let
:2
1)',( of Evaluation
'
2
~
~00
00220
~
~00
00220
000
220
20 220
2
2
0 0
2
0
222
0
cos
3
220
'
3
00
00
0
0
0
0
rrrr
rr
rrrr
rr
rr
rrk
ikikikik
ki
k
ikik
ki
k
ikik
ikikikik
k
ik
z
k
i
eeieie
iG
iekkkk
kekkikidk
kk
ke
iekkkk
kekkikidk
kk
ke
ikkk
dkkk
eek
idk
kk
ee
ik
k
ddkdkkk
eG
k
dkk
eG
41
ik 0
ik 0
ik 0
ik 0
42
Quantum mechanical scattering: Neumann series solution and Born approximation
ion.approximatBorn first theis
''4
)'(2
')'(2
)',()(
terms,first two thekeeponly weIf on theory.perturbati
oforder more one giving each term with on, gocan )solution seriesNeumann ( process This
'")"()"(2
)",'()'(2
)',(')'(2
)',()(
have werhs, its to)( Substitute
ave.incident w theisIt . with equation, shomogeneou for thesolution a is
'.)'()'(2
)',()(
).()()(2
)( then ,2
Let
).()()()( 2
equation er schroeding The
''
2'
2
22'
2
0
2
222
22
22
0
0
000
00
0
0
dee
Vm
edeVm
Ge
ddVm
GVm
GdeVm
Ge
ke
dVm
Ge
fVm
kmE
k
EVm
iik
iii
ii
i
i
rkrr
rkrkrk
rkrk
rk
rk
rrrrrrr
rrrrrrrrrrr
r
k
rrrrr
rrrr
rrrr
43
Read: Chapter 9: 7No homework
Top Related