







Languages
Pages
Legal


SPECIFIC SOFTWARE TOOL DEVELOPMENT FOR RIGID PIPELINE
DESIGN
Nuno Filipe Salsa da Silva Ferreira
Thesis to obtain the Master of Science Degree in
Petroleum Engineering
Supervisors: Professor Maria João Correia Colunas Pereira Engineer Jérémy Auer
Examination Comittee
Chairperson: Professor Amílcar de Oliveira Soares Supervisor: Engineer Jérémy Auer
Member of the Committee: Professor Luís Filipe Galrão dos Reis
June 2016


i
ACKNOWLEDGMENTS
I would like to express my gratitude for those that make this thesis a reality, first I would like to exalt
Subsea 7 in the person of Jérémy de Barbarin the integration in the team and the guidance by example to make
this thesis possible to accomplish. A special recognition to Jérémy Auer for his daily basis support either along
the thesis as all other subject that runs in an engineering office. I would like to show my gratitude to Guy
Mencarelli, Valentin Pannérec, Ivo Lourenço and so many people around the Subsea 7 world that has given a
decisive contribution for the accomplishment of this tool. A special word to my colleagues at Lisbon Office
whom exemplify one of the company values, collaboration, without them this journey should have been way
harder.
Many people have been involved helping, contributing with ideas and making this thesis possible, to them a
word of recognition.
I would like to acknowledge the contribution and support from Professor Maria João and Professor Amílcar
Soares to the fulfillment of this master.
Finaly but not less I would like to leave a word for those who are and will always be the first supporters my
family and friends, my parents Luis Filipe and Ana Maria, to my brothers Ricardo José, Inês Maria e Luis Miguel
and my nephews Santiago, Sebastião, Simão and Gastão.
“Don’t be afraid to give up the good to go for the great”, John D. Rockefeller (1839-1937)

ii

iii
ABSTRACT
The Oil&Gas industry faces tremendous structural changes driven by the low oil prices conducting to
measures to reduce its costs by optimizing engineering processes. The aim of this thesis, following the actual
trend of the Oil&Gas service companies, is to minimize their PM&E costs by developing an engineering tool
towards the improvement of efficiency.
This tool increases engineering efficiency by mitigating and preventing input data errors, as well as
accelerating design time. Sourcing different in-house calculation analysis spreadsheets, best practices and
lessons learned a specific software tool using basic programming language comprising various calculation
analyses was developed. The analysis are based on different standards used by the companies and comprises
wall thickness selection, pipeline characteristics, pipeline expansion, lateral buckling screening, on-bottom
stability and cathodic protection design. Several validation cases based on project data were assessed and
trustworthy results were produced. The final result is a validated software tool which addresses all main design
calculations. Further updates can be made due to the modular design of the tool to add additional calculations
or to follow the updates of Client specifications and Codes and Standards. This development showed an
efficient measure for the offshore industry to reduce its costs by optimizing its processes.
KEYWORDS: Rigid Pipeline, Specific Design Tool, Mechanical Design, Pipeline Expansion, Lateral Buckling, On-
Bottom Stability, Cathodic Protection.

iv

v
RESUMO
A indústria do petróleo está perante novas mudanças estruturais devido aos baixos preços do petróleo
conduzindo a medidas para a redução de custos através da optimização dos processos de engenharia. O
objectivo desta tese, seguindo a tendência actual das companhias de serviços é de minimizar os custos de
gestão de projecto e engenharia desenvolvendo uma ferramenta de engenharia que aumente a sua eficiência.
Esta ferramenta aumenta a eficiência através da mitigação e prevenção de erros na introdução de dados bem
como acelerando o projecto. Recorrendo a diferentes ferramentas, boas práticas e experiência de projectos foi
desenvolvida uma ferramenta especifica reunindo diversas análises. As análises são baseadas em diferentes
normas compreendendo o cálculo de espessura, as caracteristicas do pipeline, a expansão térmica, a
encurvadura lateral, a estabilidade de fundo do mar e a protecção catódica. Várias validações foram efectuadas
e resultados fidedignos foram obtidos. O resultado final é uma ferramenta de projecto validada que foca todos
os cálculos e que pode ser ampliada para contemplar actualizações de especificações de clientes ou normas.
Este desenvolvimento demonstra uma medida de melhoria de efciência para a indústria do petróleo reduzindo
os seus custos através da optimização dos seus processos.
PALAVRAS-CHAVE: Pipeline Rígido, Ferramenta de Projecto Específica, Projecto Mecânico, Expansão,
Encurvadura Lateral, Estabilidade Local, Protecção Catódica

vi

vii
TABLE OF CONTENTS
Acknowledgments .................................................................................................................................... i
Abstract ................................................................................................................................................... iii
Resumo ..................................................................................................................................................... v
List of Figures ........................................................................................................................................... ix
List of Tables ............................................................................................................................................ xi
Glossary ................................................................................................................................................. xiii
Acronyms ................................................................................................................................................ xv
Symbology ............................................................................................................................................ xvii
Units Systems Conversion ................................................................................................................... xxiii
1. Introduction ..................................................................................................................................... 1
1.1. Scope ....................................................................................................................................... 1
1.2. Problem Definition and Objectives ......................................................................................... 1
1.3. Structure of the Dissertation ................................................................................................... 2
2. Fundamentals of Rigid Pipeline Design ........................................................................................... 3
2.1. Mechanical Design .................................................................................................................. 3
2.1.1. Design Philosophies ......................................................................................................... 3
2.1.2. Design Limit States .......................................................................................................... 4
2.1.3. Design Loads .................................................................................................................... 5
2.1.4. Pipeline Burst due to Internal Overpressure ................................................................... 5
2.1.5. Local Collapse due to External Overpressure .................................................................. 6
2.1.6. Propagating Collapse ....................................................................................................... 6
2.1.7. Local Buckling due to Combined Load ............................................................................. 7
2.2. Pipeline Expansion ................................................................................................................... 8
2.3. Pipeline Buckling and Walking .............................................................................................. 10
2.4. On-Bottom Stability ............................................................................................................... 11
2.5. Cathodic Protection ............................................................................................................... 12
3. Methodology ................................................................................................................................. 13
3.1. Mechanical Design ................................................................................................................ 13
3.1.1. Mechanical Design Following DNV-OS-F101 ................................................................. 13
3.1.2. Mechanical Design Following API-RP-1111 ................................................................... 20
3.2. Pipeline Expansion ................................................................................................................. 23

viii
3.3. Lateral Buckling and Walking Screening ................................................................................ 24
3.3.1. Design Criteria ............................................................................................................... 24
3.3.2. Buckling Phenomena ..................................................................................................... 24
3.4. On-Bottom Stability ............................................................................................................... 25
3.4.1. Vertical Stability ............................................................................................................. 25
3.4.2. Absolute Lateral Static Stability ..................................................................................... 25
3.4.3. Wave Spectra ................................................................................................................. 26
3.4.4. Wave Directionality and Spreading ............................................................................... 28
3.4.5. Spectral Analysis ............................................................................................................ 29
3.4.6. Current Analysis............................................................................................................. 30
3.5. Cathodic Protection ............................................................................................................... 31
3.5.1. Design Criteria ............................................................................................................... 31
3.5.2. Anode Design ................................................................................................................. 32
4. Software Tool Development ......................................................................................................... 36
4.1. Conceptual Design ................................................................................................................. 36
4.1.1. Modular Design and Decision Process .......................................................................... 36
4.1.2. Implemented Solutions ................................................................................................. 38
4.2. Data Workflow ...................................................................................................................... 39
4.2.1. Input Data ...................................................................................................................... 41
5. Results and Discussion .................................................................................................................. 48
5.1. Validation of the Tool ............................................................................................................ 48
5.2. Results from Design Modules ................................................................................................ 49
5.2.1. Wall Thickness Design ................................................................................................... 49
5.2.2. Pipeline Expansion ......................................................................................................... 53
5.2.3. Lateral Buckling Screening ............................................................................................. 55
5.2.4. On-Bottom Stability ....................................................................................................... 57
5.2.5. Cathodic Protection Design ........................................................................................... 58
5.3. Discussion of the Results ....................................................................................................... 59
6. Conclusions and Further Developments ....................................................................................... 62
7. References ..................................................................................................................................... 64
8. Appendix ........................................................................................................................................ 66
Appendix A ........................................................................................................................................ 67

ix
LIST OF FIGURES
Figure 1: Improvement definition ........................................................................................................................... 1
Figure 2: Mechanical design philosophies, Source: Subsea 7 ................................................................................. 3
Figure 3: Link between design cases and limit states, Source: Ref. [1] ................................................................... 4
Figure 4: Example of Pipe burst, Source: Subsea 7 ................................................................................................. 5
Figure 5: Example of Pipe local collapse, Source: Subsea 7 .................................................................................... 6
Figure 6: Example of Propagating buckle, Source: Subsea 7................................................................................... 6
Figure 7: Buckle arrestor, Source: Subsea 7 ............................................................................................................ 7
Figure 8: Example of Local Buckling due to Combined Loads, Source: Subsea 7 .................................................... 7
Figure 9: Pipeline expansion loads, Source: Subsea 7 ............................................................................................. 8
Figure 10: Effective force distribution for short pipeline, Source: Subsea 7 ........................................................... 9
Figure 11: Effective force distribution for long pipeline, Source: Subsea 7 ............................................................ 9
Figure 12: Vertical Connector Jumper, Source: Subsea 7 ..................................................................................... 10
Figure 13: Example of Lateral Buckling, Source: Subsea 7 .................................................................................... 10
Figure 14: Pipeline loads on seabed, Source: Subsea 7 ........................................................................................ 12
Figure 15: Wall thickness definition, Source: Subsea 7 ......................................................................................... 14
Figure 16: Pressure definition, Source: Subsea 7 .................................................................................................. 14
Figure 17: Local pressure distribution, Source: Subsea 7 ..................................................................................... 15
Figure 18: Material de-rating, Source: Ref. [1] ...................................................................................................... 16
Figure 19: Coulomb friction force, Source: Subsea 7 ............................................................................................ 23
Figure 20: Peak enhancement factor, Source: Ref. [6] ......................................................................................... 27
Figure 21: Wave spreading function, Source: Ref. [4] ........................................................................................... 28
Figure 22: Global tool design modules workflow.................................................................................................. 37
Figure 23: Global tool user interface .................................................................................................................... 37
Figure 24: Trapezoidal Element, Source: Subsea 7 ............................................................................................... 38
Figure 25: Newton-Raphson Method, Source: Subsea 7 ...................................................................................... 39
Figure 26: Data Workflow ..................................................................................................................................... 40
Figure 27: Pipeline Coating Arrangement, Source: Subsea 7 ................................................................................ 42
Figure 28: Operational pressure and temperature ............................................................................................... 45
Figure 29: Bathymetry and seawater temperature .............................................................................................. 45
Figure 30: Validated Spreadsheet Result (left) and Global Tool Result (right) ..................................................... 54
Figure 31: Validated Spreadsheet Result (left) and Global Tool Result (right) ..................................................... 54
Figure 32: Validated Spreadsheet Result (left) and Global Tool Result (right) ..................................................... 55
Figure 33: JONSWAP Wave Spectrum from OrcaFlexTM
........................................................................................ 58
Figure 34: JONSWAP Spectrum from Global Tool ................................................................................................. 58
Figure 35: Validated Spreadsheet Result (left) and Global Tool Result (right) ..................................................... 59

x

xi
LIST OF TABLES
Table 1: Code wall thickness definition ................................................................................................................. 13
Table 2: Pipeline characteristics ............................................................................................................................ 41
Table 3: Steel properties ....................................................................................................................................... 42
Table 4: Anti-corrosion coating properties ........................................................................................................... 42
Table 5: Concrete weight coating properties ........................................................................................................ 43
Table 6: Operational and Environmental Data...................................................................................................... 43
Table 7: Wall thickness design loads ..................................................................................................................... 44
Table 8: Soil friction coefficients ........................................................................................................................... 44
Table 9: Lateral Buckling Additional Input Data .................................................................................................... 45
Table 10: Pipeline Route Characterization ............................................................................................................ 46
Table 11: Wave Spectrum ..................................................................................................................................... 46
Table 12: Cathodic protection design data ........................................................................................................... 46
Table 13: Coating breakdown factors ................................................................................................................... 47
Table 14: Anode geometrical characteristics ........................................................................................................ 47
Table 15: Pipeline Expansion Validation Cases ..................................................................................................... 48
Table 16: Lateral Buckling Screening Validation Cases ......................................................................................... 49
Table 17: DNV factors ........................................................................................................................................... 50
Table 18: DNV Wall Thickness Results .................................................................................................................. 51
Table 19: DNV Local Buckling Check ..................................................................................................................... 51
Table 20: API factors ............................................................................................................................................. 52
Table 21: API Wall Thickness Results .................................................................................................................... 52
Table 22: API Load Check ...................................................................................................................................... 53
Table 23: Pipeline Expansion PE.01 Validation Case Results ................................................................................ 53
Table 24: Pipeline Expansion PE.02 Validation Case Results ................................................................................ 54
Table 25: Pipeline Expansion PE.03 Validation Case Results ................................................................................ 55
Table 26: Lateral Buckling Screening LBS.01 Validation Case Results ................................................................... 56
Table 27: Lateral Buckling Screening LBS.02 Validation Case Results ................................................................... 56
Table 28: Lateral Buckling Screening LBS.03 Validation Case Results ................................................................... 57
Table 29: Spectral Analysis Results ....................................................................................................................... 57
Table 30: Cathodic Protection Results .................................................................................................................. 59
Table 31: Integration Method Refinement Assessment ....................................................................................... 60

xii

xiii
GLOSSARY Based on Subsea 7 Glossary
Design Pressure Max internal pressure during normal operation defined at a specific reference elevation.
Hydrotest Pressure Internal pressure applied to as laid pipeline system following installation and connection to check for leaks and check weld integrity.
Incidental Pressure Max pressure the pipe is designed to withstand during any incidental (i.e. temporary) operating situation, such as surge pressure or unintended shut-in pressure.
Line Pipe Welded or seamless pipe, available with the ends plain, beveled, grooved, cold expanded, flanged, or threaded; principally used to convey gas, oil, or water.
Long Pipeline Pipeline long enough to be restrained axially by the friction with the seabed.
Mill Test Pressure check used to test strength integrity of individual piping components (e.g. pipe, bends, connectors) during the FAT following fabrication and manufacture.
Short Pipeline Pipeline too short to be restrained axially by the friction with the seabed.
UOE Pipe fabrication process for welded pipes, expanded

xiv

xv
ACRONYMS
3LPE 3-Layer Polyethylene
API American Petroleum Institute
ALS Accidental Limit State
ASD Allowable Stress Design
CBF Coating Breakdown Factor
CPY Company
DNV Det Norske Veritas
ERW Electrical Resistance Welding
FAT Factory Acceptance Test
FJC Field Joint Coating
FLS Fatigue Limit State
ILT In-Line Tee
ISO International Organization for Standardization
JIP Joint Industry Project
KP Kilometric Point
LFRD Load and Resistance Factor Design
LP Line Pipe
LSD Limit State Design
MPP Mid-Point Potential
MSL Mean Sea Level
N/A Not Available or Applicable
O&G Oil and Gas
OS Offshore Standard
PE Polyethylene
PLET Pipeline End Termination
PM&E Project Management and Engineering
RP Recommended Practice or Rigid Pipeline
SAW Submerged Arc Welding
SLS Serviceability Limit State
SMYS Specified Minimum Yield Stress
SMTS Specified Minimum Tensile Stress
TRB Three Roll Bending
ULS Ultimate Limit State
WD Water Depth

xvi

xvii
SYMBOLOGY
Uppercase Latin
aA
Anode surface area
afA Anode final exposed surface area
cA Coated surface area
iA
Internal cross section area
oA
External cross section area
sA
Cross section area (corroded or not corroded)
B Attenuation constant
YC Peak horizontal load coefficient
ZC Peak vertical load coefficient
D Outer steel diameter
E Young’s modulus
aE Design closed circuit potential
xEa Anode potential function
cE Design protective potential
corrE Corrosion potential
YF Peak horizontal load
ZF Peak vertical load
H Residual lay tension
afI Final anode current output
xI a Anode current function
cmI Total mean current demand
cfI Total final current demand
ID Overall inner diameter
AttL Attenuated length
intjoL Joint or double Joint length
totalL
Total pipeline section length

xviii
M Minimum total anode mass
aM Mass of one anode
agM Gross mass of one anode
insM Insert material mass
totM Total anode mass required
tN
Number of tapers
aN
Number of anodes
iN Number of anodes per current criteria
mN Number of anodes per mass criteria
OD Overall outer diameter
afR Final anode resistance
LR Linear resistance
MeR
Steel resistivity
aP Incidental overpressure
bP Specified minimum burst pressure of pipe
cP Collapse pressure of pipe
dP Design pressure of the pipeline
eP Elastic collapse pressure
iP Internal pressure
oP External hydrostatic pressure
pP Buckle propagation pressure
tP Hydrostatic pressure
yP Yield pressure at collapse
S Specified minimum yield stress
T Sea state duration
T Single design oscillation derived period
aT
Axial tension (API)
maxT
Maximum operating temperature
pT Peak period

xix
swT
Seawater temperature
U Specified minimum tensile stress
agV Gross anode volume
pV Pocket (bolt recess) volume
tV Taper volume
WT Steel wall thickness
Lowercase Latin
a Combined coating breakdown constant
FJCa Field joint coating breakdown constant
LPCa Field joint coating breakdown constant
b Combined coating breakdown constant or buoyancy per unit length
FJCb Line pipe coating breakdown constant
LPCb Line pipe coating breakdown constant
d Inner steel diameter
0f Out of roundness
1f Bending safety factor for installation bending plus external pressure
2f Bending safety factor for in-place bending plus external pressure
cf Collapse factor for use with combined pressure and bending loads
df Internal pressure factor
ef Weld joint factor
of Collapse factor
pf Propagating buckle design factor
cbf Calculation variable
cmf Mean breakdown factor
cff Final breakdown factor
'
cff Mean final breakdown factor
tempyf , De-rating on yield stress
tempuf , De-rating on tensile stress
g Collapse reduction factor
h Water depth

xx
maxh Maximum water depth
minh Minimum water depth
refh Elevation at pressure reference level
cmi Design mean current density
g Gravity acceleration
bp Pressure containment resistance
cp Characteristics collapse pressure
dp Design pressure
ep External pressure
elp Elastic collapse pressure
incp Incidental pressure
lip Local incidental pressure
ltp Local system test pressure
minp Minimum internal pressure
pp Plastic collapse pressure
prp Propagating pressure
stp System test pressure
ytotr , Horizontal load reduction factor
ztotr , Vertical load reduction factor
ACCt Anti-corrosion coating thickness
CWCt Concrete weight coating thickness
coatt Overall coating thickness
corrt Corrosion allowance
nomt Nominal steel wall thickness
at Anode thickness
ft Design life
fabt Fabrication thickness tolerance
tt Anode end taper thickness
sw Submerged weight per unit length

xxi
Lowercase Greek
Thermal coefficient of expansion
fab Material fabrication factor
c Flow stress parameter
gw Girth weld factor
h Material hardening factor
spt System test pressure factor
p Pressure factor
U Material strength factor
Combined loading criteria factor
SC Safety class factor
A Accidental load factor
E Environmental load factor
inc Incidental to design pressure ratio factor
m Material resistance factor
W Vertical stability safety factor
Ovality
Electrochemical capacity
c Collapse strain
Sd Design strain
ax Axial friction coefficient
y Lateral friction coefficient
sw Seawater kinematic viscosity
Poisson ratio
Environmental resistivity
a Anode material density
ACC Anti-corrosion coating density
CWC Concrete weight coating density
cont Content density

xxii
s Steel density
t System test density (API)
st System test density
sw Seawater density

xxiii
UNITS SYSTEMS CONVERSION
Conventional System Units International System Units
1 bar 100 000 Pa
1 barg 100 000 Pa
1 bara 101 325 Pa
1’ (ft) 0.3048 m
1’’ (in) 0.0254 m

xxiv

1
1. INTRODUCTION 1.1. SCOPE
Nowadays trend in Oil&Gas services industry is towards more efficient processes on the project
management and engineering (PM&E). This thesis focuses on the PM&E efficiency procedures specifically on
the engineering scope of work where it is intended to implement new methodologies in order to minimize
engineering time and associated costs by errors mitigation.
The scope of errors encountered in the engineering field is broad thereby this work intends to develop a
specific tool to minimize input errors when using different in-house spreadsheets by centralizing the inputs on
a single workbook.
1.2. PROBLEM DEFINITION AND OBJECTIVES
According to the reduce costs and increase processes efficiency efforts, the rigid pipeline discipline
identified a possible optimization by merging existing standards and calculation spreadsheets to a single global
tool capable to reduce the multiple input of data mitigating therefore the error risk.
Figure 1: Improvement definition

2
The main objective of this dissertation is to develop this specific software tool for rigid pipeline design
considering the internal standards, international industry standards, best practices and lessons learned. The
objectives are summarized as follows:
Development of a specific software tool for rigid pipelines design;
Validation of the tool with project data;
Enrichment of the tool by considering multidisciplinary engineering best practices and lessons learned.
1.3. STRUCTURE OF THE DISSERTATION
This dissertation intends to perform a logical chain to describe the fundamentals of rigid pipeline
design, the standard design formulation, the implemented methodology and illustrative example based on
project data for validation.
Chapter 1 addresses the scope of the dissertation and its problem definition and objectives.
In Chapter 2 the fundamentals of design are summarized according to different international and industry
approved standards. It pretends to describe the main design premises for designing a marine pipeline.
In Chapter 3 pipeline design formulation is presented and the considerations and assumptions are scrutinized.
Chapter 4 focuses on the conceptual approach for the global tool development and solutions implemented
such as the numerical solver and the integration method.
Chapter 5 outlines the results and discussion of the software tool based on its deliverables and an illustrative
example based on project data validation scheme.
Finally Chapter 6 draws the conclusions and the key findings and proposes further developments.
Due to the large amount of information that references and supports this dissertation a References and
Appendix chapters are added.

3
2. FUNDAMENTALS OF RIGID PIPELINE DESIGN
In this chapter the fundamentals of rigid pipeline design are stated. The key design philosophies and
approaches for the preliminary pipeline design are endorsed herein.
2.1. MECHANICAL DESIGN
2.1.1. DESIGN PHILOSOPHIES
For any mechanical design there are two main design philosophies, the Allowable Stress Design (ASD)
and the Limit State Design (LSD). The ASD principle, known also as Elastic Design, ensures that the stress in the
pipeline never exceeds the yield stress, basically considering the worst load case together with the minimum
possible strength and then applying a general safety factor. The Limit State Design (LSD), also called Plastic
Design, specifies the failure condition of the pipeline (based on the ultimate strength) and then applies a safety
factor to that. It is not a less conservative approach but a more rational and cost effective method.
Figure 2: Mechanical design philosophies, Source: Subsea 7
More recently was developed the Load and Resistance Factor Design (LRFD) also a Limit Sate Design which load
factors are applied to loads and a resistance factor is applied to material strength to ensure that design loads
do not exceed design resistance.

4
2.1.2. DESIGN LIMIT STATES
By definition a Limit State consists on loads beyond which the structure no longer satisfies the requirements.
The different types of design cases and limit states applicability is presented on Figure 3.
Figure 3: Link between design cases and limit states, Source: Ref. [1]
2.1.2.1. SERVICEABILITY LIMIT STATE (SLS)
For a marine pipeline it shall be ensured that during its installation and operation it will not be unsuitable for its
intended purpose. The SLS refers to a given load that, if exceed, can cause the pipeline to be unsuitable for
continued operation. Some examples are gathered below.
Deformation and displacements due to wave and current induced motions (e.g. on-bottom stability);
Longitudinal deformations due to thermal-hydraulic variations (e.g. pipeline expansion) ;
Lateral deformations due to restrained expansion (e.g. lateral buckling);
Pipeline flow blockage due to hydrate formation and wax deposition (e.g. flow assurance).
Exceedance of a serviceability limit state category shall be evaluated as an accidental limit state (ALS).
2.1.2.2. ULTIMATE LIMIT STATE (ULS)
Ultimate Limit State is a condition which, if exceeded, compromises pipeline integrity. Considering pipelines on
the seabed subjected to lateral displacement at some extent that a local buckling will occur. It shall be ensured
that the pipeline withstands this failure by adequate safety margin. Accidental Limit State (ALS) and Fatigue
Limit State (FLS) are sub-categories of the ultimate limit state.
2.1.2.3. ACCIDENTAL LIMIT STATE (ALS)
Considering more severe return periods than ULS, the aim of the accidental limit sate is to capture non-linear
structural response effects. Adequate safety margin might be required in the pipeline design basis.

5
2.1.2.4. FATIGUE LIMIT STATE (FLS)
It is defined as an ULS condition for cyclic load effects.
2.1.3. DESIGN LOADS
It is possible to classify marine pipeline loads as follows:
Functional Loads, resultant from the operation of the pipeline mainly, self-weight, content weights
and loads due to temperature/pressure variations;
Environmental Loads, defined as the interaction loads between the pipeline and the environment
mainly wave and current induced loads;
Accidental Loads, originated from natural hazards (earthquakes, mudslides, pockmarks) and third
party hazards (dropped objects, fishing activities);
Installation Loads covers all the loads due to installation and commission activities. These loads are
quantified prior to the operation by dedicated software and allowable sea states are defined for
specific acceptable limits.
Combination of Loads, as engineering principle for a design case the most unfavorable combination of
loads is taken into account.
2.1.4. PIPELINE BURST DUE TO INTERNAL OVERPRESSURE
Pipe burst is a scenario defined when a pipeline explodes due to an internal overpressure. Typically
this over-stress phenomenon is likely to occur in the longitudinal direction since the longitudinal stress is half of
the circumferential stress considering a thin wall cylinder (ratio diameter/thickness less than 20). According
with the thin wall simplification the radial stress is assumed negligible, the shear stress are null so the
longitudinal and circumferential stresses are considered the principals.
Figure 4: Example of Pipe burst, Source: Subsea 7

6
2.1.5. LOCAL COLLAPSE DUE TO EXTERNAL OVERPRESSURE
The local collapse occurs as result of external overpressure generating a gross cross sectional
deformation and evolving to propagating buckle events. The trigger for this failure mode can be the out-of-
roundness either in the construction or installation phases or steel properties anisotropies leading to the pipe
flattening. This is typically a dominating criterion for deep and ultra-deep water projects.
Figure 5: Example of Pipe local collapse, Source: Subsea 7
2.1.6. PROPAGATING COLLAPSE
This failure mode occurs when a local collapse previously occurs being this the trigger event. When the
propagating collapse pressure is much lower than the collapse pressure, once it occurs, it may propagate
through large distances along the pipeline.
Figure 6: Example of Propagating buckle, Source: Subsea 7

7
This limit criterion generates thicker wall thickness so in order to avoid this and to prevent the propagating
buckling local buckle arrestor are installed along the pipeline assuring the containment of the propagating
buckling between a limited section.
Figure 7: Buckle arrestor, Source: Subsea 7
2.1.7. LOCAL BUCKLING DUE TO COMBINED LOAD
This design case accounts for the effect of the external overpressure as for others loads such as bending
moment/strain and point loads during temporary phases such as installation. As the pipe bends, it places the
extreme fibers in tension and compression. To partially relieve these stresses, the pipe deflects, ovalising to
flatten the areas under stress. The ovalisation reduces the bending stiffness of the pipe, eventually a runaway
point is reached and the pipe buckles that may tear or fracture, with the potential for loss of contents. Any
axial compression in the pipe adds the tendency to form a buckle.
Figure 8: Example of Local Buckling due to Combined Loads, Source: Subsea 7

8
2.2. PIPELINE EXPANSION
A pipeline subjected to temperatures and pressures higher than those that prevailed during its
installation (scenario as laid) will tend to expand longitudinally. The frictional build up occurs from the free end
of a pipeline until sufficient length has been mobilized to attain the fully restrained effective axial force. This
means that at a certain distance from the pipeline ends this expansion will be constrained by friction between
the pipeline and the seabed, which leads to increased axial forces.
Figure 9: Pipeline expansion loads, Source: Subsea 7
The achievement of equilibrium is dependent on the available friction resistance. If this friction force resistance
is not sufficient to restrain the pipeline completely at any point along the pipeline (Figure 10), the pipeline is a
so called “short pipeline”. In this case a form of equilibrium is reached at the middle of the pipeline where
strains are equal in amplitude but on different directions being a so called virtual anchor point. If there is
sufficient frictional resistance present, the strain caused by the frictional resistance will counterbalance the
sum of thermal and pressure strains, i.e. further movement is prevented, and this pipeline is so called “long
pipeline” (Figure 11). A section of the pipeline will be fully restrained, and this portion of the pipeline is often
referred to as the anchor length with one anchor point in each end of the zone.

9
Figure 10: Effective force distribution for short pipeline, Source: Subsea 7
Figure 11: Effective force distribution for long pipeline, Source: Subsea 7
The main parameters considered are the friction resistance, provided by the geotechnical team and the
pressure/temperature profile provided by the flow assurance team.
This phenomenon creates other issues such as walking, lateral buckling or upheaval buckling. The unrestrained
pipeline is prone to walking phenomenon while the restrained pipeline due to the build-up of axial compressive
forces is prone to buckling phenomena.

10
Due to the pipeline terminations expansion the PLET structures must accommodate this displacements by using
bendable pipes – spools or jumpers – being this an important input for the subsea structures project
engineering.
Figure 12: Vertical Connector Jumper, Source: Subsea 7
2.3. PIPELINE BUCKLING AND WALKING
Lateral buckling occurs when exposed pipeline is subjected to axial compressive load beyond the
critical buckling capacity. This occurs for a length of pipeline where full constrain is achieved by the soil-pipe
interaction against the thermal expansion of the pipeline. Once the pipeline is known whether it is a long
pipeline or a short pipeline, the axial driving force for lateral buckling is compared with the critical buckling
capacity. If the axial driving forces i.e. the effective axial force is larger than the critical buckling capacity, lateral
buckling is predicted to occur. Upheaval (vertical) buckling is keen to develop in trenched pipelines.
Figure 13: Example of Lateral Buckling, Source: Subsea 7

11
Pipelines are subjected to thermal cycles along their service life which will induce expansions and contractions.
During the cool down process the pipeline will tend to contract although the frictional resistance will develop
and oppose the movement, thereby the pipeline will not walk back to its initial position leading to a global
displacement of the whole pipeline. In order for walking to occur, the pipeline or a section of the pipeline must
be unrestrained by soil friction, i.e. the axial restraint provided by the soil is insufficient to overcome the
loading due to pipeline loading. This phenomenon is difficult to assess as relies under uncertainties, although
the outcome can be substantially severe for the pipeline as:
Reduces tension on risers leading to failures;
Applies additional tension on end terminations structures such as PLET;
Feeds pipeline into buckles overstraining the lateral buckling;
2.4. ON-BOTTOM STABILITY
On-bottom stability analysis is performed to ensure the stability of the pipeline, when exposed to the
action of waves and currents. The requirement to the pipeline is that no lateral or vertical movements at all are
accepted, or alternatively that certain limited movements that do not cause interference with adjacent objects
or overstressing of the pipe are allowed (typically displacements until ten diameters).
The submerged weight needs to be sufficient to ensure the stability of the pipeline. The required pipeline
submerged weight will have a direct impact on the required pipe lay tensions, installation stresses and the pipe
configuration on the seabed. From the installation viewpoint, especially where spans are not a concern, the
priority is to minimize the required pipeline submerged weight in order to reduce the pipe lay tensions and in
certain situations allow the pipeline to be installed by a relatively low cost pipe lay vessel.
Soil resistance forces will also be heavily affected by embedded/buried (or spanning) pipe sections. In general,
the actual soil resistance is a function of the load history, and it is larger for cyclic loading than for static,
unidirectional loading. The soil resistance is often assumed to be made up of frictional forces determined by
the effective weight of the pipeline (submerged weight minus lift force) and a passive soil resistance due to
embedment. The soil resistance varies along the pipeline, and in the case of lateral pipe displacements,
longitudinal soil resistance will also develop (Figure 14). The pipeline–seabed interaction is thus in general fairly
complex, and requires quite detailed information and advanced methods and calculation tools if detailed
analysis is applied.

12
Figure 14: Pipeline loads on seabed, Source: Subsea 7
2.5. CATHODIC PROTECTION
Carbon steel and stainless steel (depending on the temperature) exposed to seawater (electrolytic
environment) will suffer from corrosion. For rigid pipeline design there is an anti-corrosion coating as a primary
anti-corrosion measure and a recursive cathodic protection measure.
In the recursive solutions there are mainly two protective measures the impressed current from an external
power source (active cathodic protection) or a sacrificial anode (passive cathodic protection). It will be
addressed the cathodic protection solution using sacrificial anode.
Cathodic protection from sacrificial anodes is based on the principle of galvanic corrosion, this means that a
less noble material (typically aluminum-zinc-indium alloy) is connected to the steel pipe, providing the lower
potential for the steel pipe-sacrificial anode system.

13
3. METHODOLOGY
Along this chapter rigid pipeline design formulation is addressed according to fundamentals stated on
the previous section.
3.1. MECHANICAL DESIGN
3.1.1. MECHANICAL DESIGN FOLLOWING DNV-OS-F101
3.1.1.1. INTRODUCTION
This offshore standard (Ref. [1]) gives the criteria and recommendations on concept development,
design, construction, operation and abandonment of submarine pipeline systems. This standard is based on
Limit State Design (LSD) philosophy specifically LFRD. The objectives of this standard are to:
Ensure that the concept, development, design, operation and abandonment of pipeline systems are
safe and conducted with regard to public safety and the protection of the environment;
Provide an internationally acceptable standard of safety for submarine pipeline systems by defining
minimum requirements for concept development, design, construction, operation and abandonment;
Serve as a technical reference document in contractual matters between Purchaser and Contractor;
Serve as a guideline for Designers, Purchaser and Contractors.
This module calculates the pressure containment resistance for installation and shut-down scenario, local
buckling (collapse) based on the external overpressure for installation and shut-down scenario and propagating
buckling based on the same assumption. At the end combined load check based on load controlled and
displacement controlled condition is performed.
3.1.1.2. WALL THICKNESS DEFINITION
Two different characterizations of the wall thickness are used; 1t and 2t are referred explicitly in the
design criteria. Thickness 1t is used where failure is likely to occur in connection with a low capacity (i.e.
system effects are present) while thickness 2t is used where failure is likely to occur in connection with an
extreme load effect at a location with average thickness.
Table 1: Code wall thickness definition
Code Wall Thickness Prior to Operation Operation
1t fabnom tt corrfabnom ttt
2t nomt corrnom tt

14
The fabrication tolerance is typically given as an absolute value or percentage of the nominal wall thickness
depending on the pipe manufacturing process (welded or seamless). The nominal wall thickness is therefore
calculated as:
fab
corrnom
t
ttt
%1
1
(1)
fabcorrnom tttt 1 (2)
The wall thickness definition is presented hereafter on Figure 15.
Figure 15: Wall thickness definition, Source: Subsea 7
3.1.1.3. PRESSURE DEFINITION
On the Figure 16 is possible to visualize the relation between the pressures used to define the wall thickness.
Figure 16: Pressure definition, Source: Subsea 7

15
According to Ref. [1] the local pressure with reference to a height is determined as follows. The ratio between
the incidental pressure and design one is given by inc .
lirefcontincli hhgpp (3)
ltrefttlt hhgpp (4)
dincinc pp (5)
The figure below relates the local pressure with water depth.
Figure 17: Local pressure distribution, Source: Subsea 7
3.1.1.4. PRESSURE CONTAINMENT
The pressure containment criteria shall be considered for the operational/incidental condition and for
system pressure testing. The pressure containment shall fulfil the criteria presented in the DNV-OS-F101 (Ref.
[1]).
The operational pressure during a pipeline normal functioning is steady and below the design pressure.
However the operational pressure level may vary within a certain range due to possible dynamic effects, e.g.
initiation and shut-down. In order to protect the downstream system against peak pressures, the incidental
pressure is considered rather than the design pressure for this failure mode.
According to the Ref. [1] standard the thickness derived ( 1t ) by the pressure containment scenario must verify
the, equation (6) and (7), respectively for the local incidental pressure (equation (6)) and the local system test
pressure (equation (7)). The pressure burst for a pipeline is given by equation 8. Assuming that both system

16
pressure test and mill test pressure test have been performed according to Ref [1] the pressure containment
criteria shall be the governing one.
SCm
beli
tppp
1 (6)
SCm
belt
tppp
1 (7)
The burst pressure is given by the following equation and the thickness used can be both code wall thickness
according to the specification required and defined on Table 1,
3
22
cbb f
tD
ttp (8)
Where reduced material properties, cbf , are as follows,
15.1,min u
ycb
fff (9)
Utempyy fSMYSf ,
(10)
Utempuu fSMTSf ,
(11)
200100104.0
10050306.0
500
,,
TifT
TifT
Tif
ff temputempy (12)
Equation (12) addresses the carbon steel de-rating. For other steel grades (i.e. duplex and super duplex steel)
material de-rating is presented on Figure 18.
Figure 18: Material de-rating, Source: Ref. [1]
The pressure containment assessment is disregarded for Outer Pipe-In-Pipe (OPIP) of the Pipe-In-Pipe (PIP)
design case.

17
3.1.1.5. LOCAL BUCKLING
Local buckling implies gross deformation of the cross section. The criterion is defined as follows.
SCm
ce
tppp
1
min (13)
The characteristics resistance for external pressure shall be calculated as:
t
Dftptptptptptptp pelcpcelc 0
22 (14)
The elastic and plastic resistance pressures are given as follows.
2
3
1
2
D
tE
tpel
(15)
D
tftp fabyp
2
(16)
The third degree polynomial equation has the following analytical solution.
bypc 3
1 (17)
Where:
tpb el (18)
t
Dftptptpc elpp 0
2 (19)
2tptpd pel (20)
cbu 2
3
1
3
1 (21)
dcbbv
3
1
27
2
2
1 3 (22)
3
1cosu
v (23)
180
60
3cos2
uy (24)
3.1.1.6. PROPAGATING BUCKLING
Propagation buckling cannot be initiated unless local buckling has occurred, the criterion given below.
SCm
pr
e
tppp
2
min (25)

18
Where:
5.2
2
2 35
D
tftp fabypr (26)
Valid on this range:
4515 2 tD
3.1.1.7. LOCAL BUCKLING DUE TO COMBINED LOADS
Load Controlled Condition (LCC)
A pipeline subjected to bending moment, effective axial force and internal overpressure shall verify
the following equation.
1
2
2
2
22
tp
pp
tS
pS
tM
M
bc
eip
pc
iSdSCm
pc
Sd
SCm
(27)
Valid on this range:
4.0
4515 2
pSd
ei
SS
pp
tD
A pipeline subjected to bending moment, effective axial force and external overpressure shall verify
the following condition.
1
2
2
min
2
22
tp
pp
tS
S
tM
M
cc
ep
pc
SdSCm
pc
Sd
SCm
(28)
That shall be considered valid on this range:
4.0
4515 2
pSd
ie
SS
pp
tD
The design loads are achieved as follows.
EEFFSd SSS (29)
EEFFSd MMM (30)

19
Displacement Controlled Condition (DCC)
A pipeline subjected to longitudinal compressive strain due to bending moment and effective axial
force and internal overpressure shall verify the following condition.
ec
Sd
ppt min2 ,
(31)
This shall be considered valid on the following range.
ei pp
tD
452
Where the design strain is given by:
EEFFSd (32)
The collapse strain is calculated as follows.
gwh
b
eec
tp
pp
D
tppt
5.1min
min 75.5101.078.0, (33)
A pipeline subjected to longitudinal compressive strain due to bending moment and effective axial force and
external overpressure shall verify the following condition.
1
0, 2
min
8.0
2
SCm
c
e
c
Sd
tp
pp
t
(34)
Shall be considered valid on this range.
epp
tD
min
2 45
3.1.1.8. BUCKLE ARRESTOR DESIGN
An integral buckle arrestor may be designed according to Ref. [1]:
SCm
X
e
pp
1.1 (35)
Where the crossover pressure is,
2
2
, 201D
LtEXPpppp BA
prBAprprX (36)

20
The propagating buckle capacity of an infinite arrestor is calculated with the buckle arrestor properties as
follows.
5.2
,2
,,,2, 35
BA
BA
BAfabBAyBABAprD
tftp (37)
3.1.2. MECHANICAL DESIGN FOLLOWING API-RP-1111
This recommended practice (Ref. [2]) sets criteria for the design, construction, testing, operation, and
maintenance of offshore steel pipelines utilized in the production, production support, or transportation of
hydrocarbons. This standard follows the Limit State Design (LSD) philosophy.
3.1.2.1. INTERNAL PRESSURE DESIGN
The design criteria are stated below.
btedt PfffP (38)
td PP 80.0 (39)
ta PP 90.0 (40)
Where tP is the hydrostatic test pressure, dP is the design pressure and aP is the accidental pressure. The
design factor ( df ), weld joint factor ( ef ) and the temperature de-rating factor ( tf ) are given as per Ref. [2].
The specified minimum burst pressure is given by:
i
bD
DUSP ln45.0 (41)
The internal pressure design is disregarded for Outer Pipe-In-Pipe (OPIP) of the Pipe-In-Pipe (PIP) design case.
Longitudinal Load Design
The effective tension, effT , due to static primary longitudinal loads shall not exceed the following criteria:
yeff TT 60.0 (42)
sy AST (43)
Combined Load Design
The combination of primary longitudinal load and differential pressure load shall not exceed that given by the
following equations respectively for operation (equation (44)), accidental and system test scenarios (equation
(45)).

21
90.0
22
y
eff
b
oi
T
T
P
PP (44)
96.0
22
y
eff
b
oi
T
T
P
PP (45)
3.1.2.2. EXTERNAL PRESSURE DESIGN
Collapse due to External Pressure
The following condition shall be verified.
ioco PPPf (46)
The collapse factor, of , and the collapse pressure is given by:
22
ey
ey
c
PP
PPP
(47)
Where the yield pressure and elastic pressure are provided respectively by,
D
tSPy 2 (48)
2
3
12
D
t
EPe
(49)
Buckling due to Combined Bending and External Pressure
Combined bending strain and external pressure load shall verify the following statement,
g
Pf
PP
cc
io
b
(50)
Where b is the buckling strain under pure bending and the collapse reduction factor as function of the ovality
is given by,
201
1g (51)
And to avoid buckling bending strains should be limited as follows:
11 f (52)
22 f (53)

22
Where 1 and 2 are respectively the maximum installation and in-place strains. The 1f and 2f are bending
safety factors.
Propagating Buckles
Buckle arrestors shall be used under the following condition,
ppio PfPP (54)
Where the propagating pressure is given by:
4.2
24
D
tSPp
(55)

23
3.2. PIPELINE EXPANSION
The fully restrained effective axial force is applied on the pipeline and is given by the following equation.
oisiires TTEAApHS 21 (56)
The axial friction force given by Coulomb approach is the following.
xwS axsff (57)
The effective axial force is given by the minimum between friction and fully restrained forces.
resffeff SSS ,min (58)
If the fully restrained force is higher than the friction force along the entire flowline there is no anchored
length.
It is defined a hot end where temperatures and pressures are higher and cold end at the other extremity. The
virtual anchored point from hot end is defined on the intersection between the fully restrained and friction
force if there is an anchored length, otherwise it will be considered at maximum friction point. The slope is
taken into account by achieving an equivalent friction coefficient.
Figure 19: Coulomb friction force, Source: Subsea 7
Starting from the Coulomb friction force methodology:
cosWR (59)
Rf ax (60)
The corrective term is achieved by:
sinWfW (61)
Apparent friction is derived as:
sincos axeq Wf (62)
So the apparent axial friction coefficient is given by:
sincos axeq (63)
Rf
displacement
W
fW

24
The hot end, cold end and ILT expansion is then determined by,
dx
AE
xSxS
hotx s
ffres
hot
0
(64)
dx
AE
xSxScold
tot
x
L s
ffres
cold
(65)
dx
AE
xSxSILT
anchor
x
x s
ffres
ILT
(66)
There will be expansion at ILT if it’s positioned on the mobilized part of the pipeline.
3.3. LATERAL BUCKLING AND WALKING SCREENING
3.3.1. DESIGN CRITERIA
As per Ref. [3] the pipeline is susceptible to buckling if the following inequality is true:
Creff SS max, (67)
3.3.2. BUCKLING PHENOMENA
The critical buckling force is achieved by the following equation.
CrBcr SSS ,65.0min (68)
And relies on two parameters, one dependent of Euler buckling of straight pipeline section and other related to
pipeline curve sections. The critical force under which a buckle in a large radius route bend can be developed is
given by:
RSS LBcrB (69)
Where LBS is the maximum lateral friction force.
The Hobbs safe force for infinite mode buckling (based on Euler buckling) is given by:
21
80.3
D
SEIS LB (70)

25
3.4. ON-BOTTOM STABILITY
3.4.1. VERTICAL STABILITY
In order to avoid floatation in water, the submerged weight of the pipelines is checked to see if the
following criterion is met:
00.1
bw
b
s
W (71)
3.4.2. ABSOLUTE LATERAL STATIC STABILITY
The absolute lateral stability approach detailed in Ref. [4], restricts lateral displacement of pipeline, i.e.
hydrodynamic stability during a given sea state.
This is based on a static equilibrium of forces that ensures that the resistance of the pipe against motion is
sufficient to withstand maximum hydrodynamic loads during a sea state, i.e. the pipe will experience no lateral
displacement under the design extreme single wave induced oscillatory cycle in the sea state considered. The
following conditions shall be fulfilled:
00.1
Rssw
ZswY
SCFw
FF
(72)
00.1
s
ZSC
w
F (73)
Being the peak horizontal and vertical loads defined as:
2,2
1 VUCODrF YswytotY (74)
2,2
1 VUCODrF ZswztotZ (75)
The soil passive resistance force RF is defined either for sand or clay soils. Load reduction factor totr is
defined by the sum of reduction factors due to soil penetration, trenching and permeable seabed.

26
3.4.3. WAVE SPECTRA
3.4.3.1. JONSWAP SPECTRUM
The JONSWAP (Joint North Sea Wave Project) spectrum is formulated as a modification of the Pierson-
Moskowitz spectrum for a developing sea state in a fetch limited situation.
2
5.0expp
p
PMJ SAS
(76)
Being A a normalization factor.
ln287.01 A (77)
Since the Pierson-Moskowitz spectrum is given by:
4
542
4
5exp
16
5
p
psPM HS
(78)
The extended formulation of the JONSWAP spectrum is given below:
2
5.0exp4
52
4
5exp
p
p
p
J gS
(79)
Alpha is a parameter that relates to the wind speed and fetches length, otherwise is the intensity of the
spectra. Gamma is defined as peak enhancement factor and beta is the shape factor. According to Ref. [5] the
parameters are as follow:
ln287.0116
52
42
g
H ps (80)
else
p
09.0
07.0 (81)
0.50.1
0.56.315.175.5exp
6.30.5
s
p
s
p
s
p
s
p
H
T
H
T
H
T
H
T
(82)
Typical default values for the North Sea are the following.
25.1
3.3
01.0,0081.0

27
The impact of the peak enhancement factor can be seen in the following figure for a JONSWAP spectrum.
Figure 20: Peak enhancement factor, Source: Ref. [6]
The spectral moment of n-th order is achieved according to:
0
dSM n
n
(83)
For the JONSWAP spectrum the spectral moments according to Ref. [5] are given approximately by:
2
016
1sHM (84)
5
8.6
16
1 2
1 psHM (85)
5
11
16
1 22
2 psHM (86)

28
3.4.3.2. OCHI-HUBBLE SPECTRUM
Ochi and Hubble (Ref. [6]) suggested to describe bimodal spectra by a superposition of two modified
Pierson-Moskovitz spectra defined as a sum of two three-parameter wave spectra one representing the low
frequency components and the other high frequency components of the wave energy. The formulation is given
below.
2
1
4
14
2
4
14exp
4
14
4
1
j
mjjsj
j
mj
j
OHj
j
HS
(87)
For sake of simplicity within the tool it is defined only a single modal spectrum therefore the equation reduces
to:
4
14
2
4
14exp
4
14
4
1
ps
p
OH
HS
(88)
3.4.4. WAVE DIRECTIONALITY AND SPREADING
For spectral analysis it is decisive to understand the energy main direction and spreading therefore reduction
factors are determined to take into account the spreading of the wave energy. The following formulation is
defined as per Ref. [4] and presented hereafter.
Figure 21: Wave spreading function, Source: Ref. [4]
The effect of main directionality and wave spreading is introduced in the form of reduction factor:
2
2
dDR wD (89)

29
Where:
else
s
s
D w
s
w
0
22sincos
25.0
211 2
(90)
And the spreading factor:
else
s w
24
3
48
(91)
3.4.5. SPECTRAL ANALYSIS
The wave induced velocity spectrum at seabed may be obtained through a spectral transformation of the
waves at sea level using a first order wave theory.
SGSUU 2
(92)
The transfer function that transforms sea surface elevation to seabed wave induced velocity is given by:
hk
G
sinh
(93)
The dispersion relation, this is the relation between the wave frequency and wave number is given by a
transcendental equation:
hkkg
tanh2
(94)
There are some simplifications for shallow and deep water cases. For shallow water, defined as below the wave
number is given by:
hkh
2020
And for deep water:
hkh
2
Where the wavelength relation with wave number is,
k
2 (95)

30
For shallow water the relation between wave number and wave frequency reduces to:
hg
khkhk
tanh (96)
And for deep water:
g
khk2
1tanh
(97)
For all other case a numerical solver will solve the dispersion relation.
The spectral derived mean zero up-crossing period is given below.
2
02M
MTu (98)
The spectral derived oscillatory velocity is,
02 MU s (99)
The perpendicular projected single oscillation velocity amplitude is provided by.
Ds RUU
ln2
5772.0ln2
2
1 (100)
3.4.6. CURRENT ANALYSIS
The mean perpendicular current velocity over a pipe diameter is defined as:
c
r
rcc
z
z
z
OD
OD
z
zVVV sin
1ln
11ln1
0
0
0
*
(101)

31
3.5. CATHODIC PROTECTION
3.5.1. DESIGN CRITERIA
To meet anode mass criteria the following inequality shall be verified.
totaa MMN (102)
And to meet the final current output criteria the expression below shall be verified.
cfafa IIN (103)
According to Ref. [7] for distances between anodes higher than 300 m the effect of the metallic resistance in
the pipe wall shall be taken into account, for that anodes spacing larger than 300 m shall verify the attenuation
criteria.
For the attenuation criteria two formulations were implemented, the conservative DNV approach (Ref. [7]) and
a more realistic Uhlig’s approach (Ref. [8]).
According to Ref. [7] approach the protected length is as follows.
00
2
22
'
242. ac
cfcmMe
total
cfaf
total
cfaf
cmcfMe
Att EEWTDWT
Dfi
L
IR
L
IR
ifD
WTDWTL
(104)
The Uhlig’s approach (Ref. [8]) is presented below.
L
af
L
af
corr
acorr
corr
acorr
R
BR
R
BR
E
EE
E
EE
BL
1
18.08.0
ln2
22
max
(105)
Where the pipeline attenuation constant is,
cm
ccorr
cfL
i
EE
fRDB
'
(106)
The linear resistance is,
22 24
WTDD
RR Me
L
(107)

32
3.5.2. ANODE DESIGN
Based on typical project specifications it is defined two possible arrangements: combined breakdown factor
typically given by the ISO standard (Ref. [9]) and an individual breakdown for the Field Joint Factor (FJC) and
Line Pipe Coating (LPC) factor typically based on Ref. [7].
For that mean current demand is achieved for the FJC plus LPC currents or for the entire pipeline, taking into
account the surface coated areas.
cmLPCcmLPCcLPCcm ifAI .,, (108)
cmFJCcmFJCcFJCcm ifAI ,,, (109)
FJCcmLPCcmcm III ,, (110)
Or based in combined pipeline coating breakdown factor.
cmcmccm ifAI (111)
Where the mean coating breakdown factors are given for the combined arrangement as,
fcm tbaf 5.0 (112)
Or based on an individual arrangement,
fLPCLPCLPCcm tbaf 5.0, (113)
fFJCFJCFJCcm tbaf 5.0, (114)
The final coating breakdown is achieved following,
fLPCLPCLPCcf tbaf , (115)
fFJCFJCFJCcf tbaf , (116)
Or,
fcf tbaf (117)
The mean final coating breakdown factor is achieved by:
FJCcf
jo
FJCLPCcfcf f
L
Lff ,
int
,
' (118)
Final current demand is determined as follow:
cmLPCcfLPCcLPCcf ifAI .,, (119)
cmFJCcfFJCcFJCcf ifAI ,,, (120)
FJCcfLPCcfcf III ,, (121)

33
Or considering a combined arrangement,
cmcfccf ifAI (122)
The gross anode volume is determined by subtracting from a gross cylindrical anode volume the taper volume
and the bolt recess volume (pocket volume) and the inserted material volume.
ppttttaaaaaaag VNVNLNLhtdtdV
22
4
22 (123)
The pocket (bolt recess) volume is considered as follow.
3000125.0 mVp
And the tapered volume (truncated cone) is,
attatta
ta
t
ta
taata
ta
taaaat
hLthLtt
Ld
Ltt
Ltdtd
tt
LtdtdV
22
4
2
2
4
2
32
2
4
2
3
2
22
(124)
The gross anode mass is computed by multiplying the anode volume by its density.
agaag VM (125)
The insert material mass is considered 10 % of the gross anode mass.
agins MM 10.0
The net anode mass is therefore:
insaga MMM (126)
The total net anode mass to meet mean current demand is calculated as,
u
tIM
fcm
tot
8760 (127)
The anode final resistance according to Ref. [9] is given by,
af
afA
R
315.0 (128)
The final anode current output is given by,

34
af
ac
afR
EEI
(129)
The number of anodes based on mass criteria is given by.
a
tot
mM
MN (130)
The number of anodes based on the current criteria is given by.
af
cf
iI
IN (131)
Therefore maximum anode spacing, based on number of joints is given by,
imjo
tot
NNL
LS
,maxint
int
1 (132)
The maximum anode spacing, in meters is given by,
int12 joLSS (133)
The minimum number of anodes is given,
1int2
S
LN tot
a (134)
Therefore the total anode mass is achieved by,
aa MNM (135)
The current demand and potential required at the star of the protected pipeline is given by,
af
L
acorr
a
RL
BB
LBR
EEI
2sinh
2cosh
1
(136)
2sinh
2sinh
12L
B
LLB
II aa (137)
The end flowline electrochemical potential is given by,
11 aafaa IREE (138)

35
22 aafaa IREE (139)
Therefore the Mid-Point Potential (MPP) is given by,
2sinh
1
LBB
IRMPP a
L
(140)
The equation that provides the potential attenuation along the pipeline is given by,
corrEL
xBMPPxE
2cosh (141)

36
4. SOFTWARE TOOL DEVELOPMENT
In this chapter the conceptual design approach is scrutinized as the implemented solutions. The data
workflow is presented and the interaction between design modules is explained. The data for validation is
presented herein.
4.1. CONCEPTUAL DESIGN
The tool is developed towards an increasing process efficiency this is, avoiding multiple inputs typing
and therefore mitigating the error. It is also important to increase the interchangeability of data originated
from multiple modules. The end users target is the pipeline design engineers, therefore engineering judgment
is required.
Engineering tools are developed to minimize the time consumed by large number of repetitive calculations that
needs to be performed, although they need to be user-centered, pragmatic, accessible and clearly explained.
The application is developed in Microsoft™ Excel® using the Visual Basic for Applications (VBA) a powerful and
available tool. For simple calculations the standard Excel formulae database is used while for dedicated
applications VBA is applied, for instance in the case of spectral analysis.
4.1.1. MODULAR DESIGN AND DECISION PROCESS
The modular design approach enables further developments of the tool by independently adding new
design modules. This is a critical design criterion since the industry standards are continuously evolving and
incorporating field-proven methods.
The decision process aimed to a logic loop starting on the design and subsequent verification with pipeline
environmental and operational conditions known as in-place analysis. The process can be described as a
primary design, focusing wall thickness and buckle arrestor design, complementary design addressed by the
cathodic protection and design verification assessment by in-place analysis such as pipeline expansion, lateral
buckling screening and on-bottom stability. Consecutive loops of this process enable to define the pipeline, the
coating and the ancillary designs. This modular design approach enables the end user to run sequentially the
modules or execute individually each module.
As seen on Figure 22 the tool workflow is color coded and numbered allowing the end-user to track its
engineering design.

37
Figure 22: Global tool design modules workflow
The tool requires the indication from the user, as seen below on Figure 23, of which design case the user wants
to pursue. The affirmative case will lead to wall thickness verification while the negative case will lead to wall
thickness design according to the design code selected afterwards.
Figure 23: Global tool user interface
Afterwards the tool determines the wall thickness either by the DNV [1] or API [2] design codes. All the
remaining design modules are run sequentially leading to a full pipeline design with associated deliverables.

38
4.1.2. IMPLEMENTED SOLUTIONS
In order to overcome integration and solving demands from the design modules, the following methods were
implemented.
4.1.2.1. NUMERICAL INTEGRATION METHOD
The numerical integration solution implemented is based on the Riemann integral using trapezoidal
elemental area. By summing all the individual areas under the curve the integration is achieved as shown
below by equation (142).
N
i
iiii
x
xxxfxf
dxxf1
11
02
(142)
4.1.2.2. NUMERICAL ITERATION METHOD
The numerical iteration method implemented relies on the well-known Newton-Raphson Method. The
Newton-Raphson method or Newton method is a numerically linear approximation method based on
minimizing the objective function error.
Figure 24: Trapezoidal Element, Source: Subsea 7

39
Figure 25: Newton-Raphson Method, Source: Subsea 7
The following iterative estimates are given by:
i
i
iixf
xfxx
'1
(143)
The objective function first order derivate is defined as follows.
ix
idx
xdfxf ' (144)
4.2. DATA WORKFLOW
The goal of the global tool is the interactivity between modules avoiding multiple data input. As the
decision process aims to a logic loop the data workflow also pretends to perform a loop starting by the
introduction of the general data, following the wall thickness design as addressed on chapter before the
decision process is put in place and the data workflow is presented hereafter on Figure 26.

40
Figure 26: Data Workflow

41
As defined on section 1.2 error mitigation is the guideline of this thesis thereby a data workflow is proposed to
deal with this issue. The wall thickness is design using module 1 being afterwards updated in the input data
spreadsheet (module 0) therefore this wall thickness, commercial or nominal is tested for all design modules
accounted. This data workflow enables the user to reduce data typing.
4.2.1. INPUT DATA
The tool requires two types of input data: general data and individual dedicated data:
General data comprises all the relevant information about the pipeline characteristics, pressure,
temperature and water depths;
Individual data gathers specific data for each module requirements.
The general data is intended to be introduced on the Input Data tab while the dedicated individual data shall
be introduced in each design module. Since this is an engineering tool, it is assumed engineering judgment for
data introduction.
4.2.1.1. GENERAL DATA
Hereafter all relevant data for validation purposes based on multiple project data information are presented.
Table 2: Pipeline characteristics
Parameter Units Value
Steel outer diameter in / mm 12.75 / 323.85
Steel wall thickness mm 26.97
Fabrication tolerance % 10
Corrosion allowance mm 0.0
Out-of-Roundness % 1.5
Field Joint Coating cut-back mm 160
Length km 31.612
The wall thickness is achieved by the mechanical design modules and afterwards updated in the input data tab
where geometrical, weight and stiffness calculations are performed.

42
The material properties are summarized below on Table 3.
Table 3: Steel properties
Parameter Units Value
Steel grade - API X65
Fabrication process - Seamless
SMYS MPa 448
SMTS MPa 530
Young’s modulus MPa 207 000
Poisson ratio - 0.3
Steel density kg/m3 7850
Coefficient of thermal expansion ⁰C-1
1.17x10-5
Supplementary fabrication requirements - U
The coating arrangement accepted by the tool is shown below on Figure 27
Figure 27: Pipeline Coating Arrangement, Source: Subsea 7
The anti-corrosion coating is presented hereafter.
Table 4: Anti-corrosion coating properties
Parameter Units Value
Anti-corrosion coating type - 3LPE
Anti-corrosion coating thickness mm 3.2
Anti-corrosion coating density kg/m3 900

43
The concrete weight coating is defined below.
Table 5: Concrete weight coating properties
Parameter Units Value
Concrete weight coating type - Standard Concrete
Concrete weight coating thickness mm 50
Concrete weight coating density kg/m3 2240
The operational and environmental data is presented hereunder.
Table 6: Operational and Environmental Data
Parameter Units Value
Content density kg/m3 1088
System test density kg/m3 1025
Seawater density kg/m3 1025
Maximum water depth m 1250
Minimum water depth m 937
This is the general data to feed the design tool by the Input Data tab. A deliverable is created within this tab
and afterwards attached to the design report.

44
4.2.1.2. INDIVIDUAL DATA
Wall Thickness Design
Pipeline operational data are presented hereafter on Table 7.
Table 7: Wall thickness design loads
Parameter Units Value
Design pressure @ MSL bar 250
Incidental pressure @ MSL bar 275
Hydrotest pressure @ MSL bar 305
Functional bending moment kN·m 950
Environmental bending moment kN·m 200
Functional effective axial force kN 500
Environmental effective axial force kN 450
Functional axial compressive strain % 0.25
Environmental axial compressive strain % 0.10
The geotechnical data from the soil is gathered on Table 8.
Pipeline Expansion
Table 8: Soil friction coefficients
Parameter Units Best Estimate
Axial friction coefficient - 1.0
Lateral friction coefficient - 0.5

45
Figure 28: Operational pressure and temperature
Figure 29: Bathymetry and seawater temperature
Lateral Buckling Screening
Hereafter are shown the dedicated input data for the lateral buckling screening design module. No residual lay
tension is considered for the design.
Table 9: Lateral Buckling Additional Input Data
Parameter Units Value
Residual lay tension kN 0
The pipeline route is presented hereafter highlighting the curves KP start, radius and length.

46
Table 10: Pipeline Route Characterization
Kilometric Point Curve Radius Curve Length
3.2 km 250 m 358 m
13.2 km 250 m 364 m
28.2 km 200 m 1200 m
On-Bottom Stability
Below is presented the wave spectrum considered for the spectral analysis.
Table 11: Wave Spectrum
Parameter Units Value
Wave spectrum - JONSWAP
Peak enhancement factor - 1.0
Significant wave height m 2.88
Wave peak period s 15.5
Cathodic Protection Design
The cathodic protection requirements are summarized below on Table 12.
Table 12: Cathodic protection design data
Parameter Units Value
Design life year 25
Anode type - Half-shell bracelet
Anode material - Al-Zn-In
Anode density kg/m3 2750
Design protective potential - mV 800
Design closed circuit potential - mV 1050
Corrosion potential - mV 630
Steel resistivity Ω·m 2 x 10-7
Seawater resistivity Ω·m 0.30
Mean current density mA/m2 0.07
Anode electrochemical capacity A·hr / kg 1600

47
The combined coating breakdown factors are presented below on Table 13. The combined factors are referred
to the resultant breakdown factors for a combination of line pipe coating and field joint coating.
Table 13: Coating breakdown factors
Line Pipe Coating Field Joint Coating Coating Breakdown Factor
3LPE Liquid epoxy + PE HSS a 0.007
b 0.0005
Table 14: Anode geometrical characteristics
Parameter Units Value
Anode length mm 400
Anode thickness mm 40
Gap between half-shells mm 100
Number of pockets - 2
No taper is considered for this anode due to the presence of the concrete weight coating.

48
5. RESULTS AND DISCUSSION
In this chapter, the validation of the tool and the main achievements are presented through
comparison between validated spreadsheets results and the global tool outcome.
5.1. VALIDATION OF THE TOOL
In order to perform the validation of the proposed methodology a multiple source illustrative project
data is considered being the results afterwards compared with the existing standards output. An error is
determined based on the validated spreadsheet as shown below.
%100exp
validated
erimentalvalidated
x
xxerror (145)
The validation intends to assess the Global Tool results with existing in-house and validated spreadsheets and
for that general and dedicated data are presented in chapter 4.2.
The mechanical design validation covers the existing spreadsheets although some features such as new design
approaches are validated combining multiple methodologies along the existing spreadsheets. The design
intends to validate both design criteria covering all failures modes.
Pipeline expansion validation is covered by the cases gathered in Table 15. It pretends to assess the expansion
under full (operational) and empty (shut-down) conditions, different combinations of pipeline end terminations
and the existence of in-line structure.
Table 15: Pipeline Expansion Validation Cases
Validation Case In-Line Tee End Termination Scenario
PE.01 Yes at 12.635 km Free / Free Shut-Down
PE.02 Yes at 12.635 km Free / Free Operation
PE.03 No Free / Fixed Shut-Down
The lateral buckling screening validation intends to cover different pipeline end termination conditions and the
impact on the pipeline weight.

49
Table 16: Lateral Buckling Screening Validation Cases
Validation Case End Termination Scenario
LBS.01 Free / Free Shut-Down
LBS.02 Free / Free Operation
LBS.03 Free / Fixed Shut-Down
The on-bottom stability base on [4] is being currently updated as the associated tool by the standard provider,
thereby there is no validated tools to cross check the outcome of this design module. Also within the pipeline
discipline there is no validated spreadsheet, although a partial validation is performed on the spectral analysis
and the outcome compared with industry based OrcaFlex™ provided by Orcina.
The cathodic protection validation is covered by two validated spreadsheets covering the entire cathodic
protection methodology implemented within the tool. The same coating for the entire pipeline is assumed
thereby the breakdown factors for the field joint coating and line pipe coating are the same.
5.2. RESULTS FROM DESIGN MODULES
Herein all the results provided by the Global Tool are compared with the validated spreadsheets
output and a deviation is computed.
5.2.1. WALL THICKNESS DESIGN
The wall thickness design can be performed either by the DNV-OS-F101 (Ref. [1]) or API-RP-1111 (Ref.
[2]) both industry-wide accepted pipeline design standards. Hereafter the wall thickness calculation is
addressed according to DNV-OS-F101 [1] based on the project data detailed on chapter 4.2.1.

50
Table 17: DNV factors
DNV Factor Symbol Value
Out-of-Roundness 0f
1.50 %
De-rating on yield stress tempyf ,
0 MPa
De-rating on tensile stress tempuf ,
0 MPa
Material strength factor U
1.00
Incidental to design pressure ratio factor inc
1.10
Material resistance factor m
1.15
Material hardening factor h 0.93
Condition load effect factor C 0.77
Functional load factor – System check
F 1.20
Functional load factor – Local check 1.10
Environmental load factor – System check
E 0.70
Environmental load factor – Local check 1.30
Resistance strain factor 2.0 (Low)
The product is a typical non-flammable water based fluid (Category A) and it is designated as Location Class 1
(pipeline section with no frequent human activity) therefore the following safety classes are assigned [1].
Failure Mode Scenario Safety Class
Pressure Containment System Test 1.046 (Low)
Operation 1.046 (Low)
Collapse Installation 1.040 (Low)
Shut-Down 1.040 (Low)
Propagating Buckling Installation 1.040 (Low)
Shut-Down 1.040 (Low)
Load Controlled Condition System Check 1.040 (Low)
Local Check 1.040 (Low)
Displacement Controlled Condition System Check 1.040 (Low)
Local Check 1.040 (Low)

51
The results provided by the tool are gathered below.
Table 18: DNV Wall Thickness Results
DNV-OS-F101 Global Tool Validated Spreadsheet Error
Scenario System Test Operation System Test Operation System Test Operation
Pressure containment
12.33 mm 11.46 mm N/A N/A N/A N/A
Utilisation factor
59.9 % 55.6 % 59.9 % 55.5 % 0.0% 0.0%
Scenario Installation Shut-Down Installation Shut-Down Installation Shut-Down
Collapse 12.76 mm 12.76 mm N/A N/A N/A N/A
Utilisation factor
38.9 % 38.9 % 38.9 % N/A 0.0 % N/A
Propagating buckling
20.10 mm 20.10 mm N/A N/A N/A N/A
Utilisation factor
99.9 % 99.9 % 99.8 % N/A 0.0 % N/A
Nominal wall thickness
20.10 mm 20.11 mm 0.00 %
The commercial line pipe availability is a critical design parameter which is assessed in the early phase of
pipeline design, therefore for the in-place analysis the tool provides the option to verify with a commercial wall
thickness based on Ref. [10] and Ref. [11] standard line pipe dimensions.
On Table 19 is summarized the load buckling check according to DNV-OS-F101 standard (Ref. [1]).
Table 19: DNV Local Buckling Check
DNV-OS-F101 Global Tool Validated Spreadsheet Error
Scenario System Check
Local Check System Check
Local Check System Check
Local Check
Load Controlled Condition
1.836 2.027 1.836 2.027 0.0 % 0.0 %
Displacement Controlled Condition
0.199 0.220 0.199 0.220 0.0 % 0.0 %

52
The next table gathers the results for the wall thickness design factors based on API-RP-1111 standard (Ref.
[2]).
Table 20: API factors
API Factor Symbol Value
Internal pressure design factor df 0.90
Weld joint factor ef 1.00
Temperature de-rating factor tf 1.00
Collapse factor of 0.70
Bending safety factor for installation conditions 1f 3.3
Bending safety factor for in-place conditions 2f 2.0
The results prompted by the Global Tool API design module are shown below.
Table 21: API Wall Thickness Results
API RP 1111 Global Tool Validated Spreadsheet Error
Scenario System Test Operation System Test Operation System Test Operation
Pressure containment
12.01 mm 12.66 mm 12.01 mm 12.66 mm 0.0 % 0.0 %
Scenario Installation Shut-Down Installation Shut-Down Installation Shut-Down
Collapse 11.73 mm 11.73 mm 11.73 mm 11.73 mm 0.0 % 0.0 %
Propagating buckles
21.33 mm 21.33 mm 21.34 mm 21.34 mm 0.0 % 0.0 %
Nominal wall thickness
21.33 mm 21.34 mm 0.0 %

53
Hereunder on Table 22 the load check is performed according to Ref. [2].
Table 22: API Load Check
API Global Tool Validated Spreadsheet Error
Longitudinal Load
System Test 0.113 0.113 0.0 %
Operation 0.167 0.167 0.0 %
Incidental 0.138 0.138 0.0 %
Combined Load
System Test 0.496 0.496 0.0 %
Operation 0.427 0.427 0.0 %
Incidental 0.463 0.463 0.0 %
Buckling due to Combined Load and External Pressure
Installation 3.561 3.561 0.0 %
In-Place 5.876 5.876 0.0 %
5.2.2. PIPELINE EXPANSION
The results from pipeline expansion module and validated spreadsheet are cross checked hereunder
covering PE.01, PE.02 and PE.03 validations cases.
The results from the first validation case PE.01 are gathered on Table 23 and Figure 30.
Table 23: Pipeline Expansion PE.01 Validation Case Results
Parameter Global Tool Validated Spreadsheet Error
Validation Case PE.01
Anchor Point from hot end
1500 m 1293 m 16.009 %
Anchor Point from cold end
1112 m 1079 m 3.058 %
Expansion at hot end 0.299 m 0.292 m 2.397 %
Expansion at cold end 0.201 m 0.202 m 0.495 %
Anchored Length 29000 m 29240 m 0.821 %
Expansion at ILT 0.000 m 0.000 m 0.0 %

54
Figure 30: Validated Spreadsheet Result (left) and Global Tool Result (right)
The results prompted either by in-house spreadsheet and the global tool is presented hereafter on Table 24
Figure 31.
Table 24: Pipeline Expansion PE.02 Validation Case Results
Parameter Global Tool Validated Spreadsheet Error
Validation Case PE.02
Anchor Point from hot end
1000 m 969.5 m 3.146 %
Anchor Point from cold end
862 m 806.4 m 6.895 %
Expansion at hot end 0.219 m 0.219 m 0.000 %
Expansion at cold end 0.149 m 0.151 m 1.325 %
Anchored Length 29750 m 29836 m 0.288 %
Expansion at ILT 0.000 m 0.000 m 0.0 %
Figure 31: Validated Spreadsheet Result (left) and Global Tool Result (right)

55
The results from validation case PE.03 are presented below on Table 25 and Figure 32.
Table 25: Pipeline Expansion PE.03 Validation Case Results
Parameter Global Tool Validated Spreadsheet Error
Validation Case PE.03
Anchor Point from hot end
1500 m 1293 m 16.009%
Anchor Point from cold end
0 m 0 m 0.0 %
Expansion at hot end 0.299 m 0.292 m 2.397%
Expansion at cold end 0.000 m 0.000 m 0.0 %
Anchored Length 30112 m 30319 m 0.683%
Expansion at ILT N/A N/A -
Figure 32: Validated Spreadsheet Result (left) and Global Tool Result (right)
5.2.3. LATERAL BUCKLING SCREENING
The results obtained from both the global tool lateral buckling screening module and equivalent validated
spreadsheet is presented hereafter.

56
On Table 26 is presented the results derived from the validation case LBS.01.
Table 26: Lateral Buckling Screening LBS.01 Validation Case Results
Global Tool Validated Spreadsheet
Validation Case LBS.01
The graphical results from validation case LBS.02 are shown below on Table 27.
Table 27: Lateral Buckling Screening LBS.02 Validation Case Results
Global Tool Validated Spreadsheet
Validation Case LBS.02

57
The latest validation case for the lateral buckling screening LBS.03 is presented below.
Table 28: Lateral Buckling Screening LBS.03 Validation Case Results
Global Tool Validated Spreadsheet
Validation Case LBS.03
5.2.4. ON-BOTTOM STABILITY
The results provided by the global tool and by OrcaFlexTM
are shown below.
Table 29: Spectral Analysis Results
Spectral Moment Global Tool OrcaFlex™ Error
M0 0.5184 m2/Hz 0.5182 m
2/Hz 0.05 %
M2 0.0043 m2/Hz 0.0042 m
2/Hz 0.19 %

58
Figure 33: JONSWAP Wave Spectrum from OrcaFlex
TM
Figure 34: JONSWAP Spectrum from Global Tool
The error source on the spectral moments is discussed on the following chapter.
5.2.5. CATHODIC PROTECTION DESIGN
Hereafter the outcomes of the cathodic protection design from both validated spreadsheets and global tool are
presented. The global tool validation for cathodic protection is covered by two validated spreadsheets, one
focusing the anode design and another for the attenuation profile according to the Uhlig’s approach (chapter
3.5).
OrcaFlex 9.7c
Spectral Density for Wave Train 'Wave1'
Frequency (Hz)
0.20.150.10.050
Sp
ectr
al D
en
sity (
m^2
/ H
z)
12
10
8
6
4
2
0

59
Table 30: Cathodic Protection Results
Parameter Global Tool Validated Spreadsheets Error
Mass of one anode 38.8 kg 42.38 kg 8.4%
Maximum anode spacing 232 m 256 m 9.4%
Maximum protected length
1109 m 1108 m 0.1%
Minimum number of anodes required
137 un 124 un 10.5%
Figure 35: Validated Spreadsheet Result (left) and Global Tool Result (right)
5.3. DISCUSSION OF THE RESULTS
Overall, all design modules where validated either by existing validated spreadsheet or by widely
industry used software, by cross checking the outcome or by performing partial validations.
Regarding the methods implemented on the tool, both the numerical integration and numerical solver
methods provided trustworthy results and in line with the existing spreadsheets.
To be noted the standard spreadsheets were developed using Mathcad, a well-known engineering
tool. Some of the deviations are directly connected with the capabilities of this tool when compared with Excel.
Mathcad built-in integration method is based on the Simpson’s rule based in trapezoidal elemental areas which
increases the number of trapezoids until the desired tolerance is obtained. The integration method
implemented and described on chapter 4.1.2.1, is based on trapezoidal integration based on the standard
Riemann’s integral method. Specific results assessments are highlighted further ahead in this chapter on Table
31.

60
For pipeline steel wall thickness design a validation is performed based on existing in-house developed
and validated spreadsheets. Since the outcome from both the global tool and the validated spreadsheets are
different partial assessment are verified. The global tool mechanical design module following DNV-OS-F101
(Ref. [1]) results gathered in Table 18 and Table 19 demonstrates 0.0 % deviation from the validated tools. The
tool has the ability to cover broad design since it enables the user to select design conditions such as taking
into account the corrosion or the material de-rating. Also the API-RP-1111 (Ref. [2]) design module prompted
reliable results as shown on Table 21 by deviations of 0.0 %.
The results for pipeline expansion are in-line with the existing spreadsheet. The error has three sources:
Weight calculation;
Anchor point determination;
Integration method.
The error source related to the weight calculation derives from the fact that the validated spreadsheet does
not take into account the primary coating (anti-corrosion coating) but only the CWC coating. Therefore, it gives
a conservative larger movable pipeline section. The impact of the weight is seen on equation 57.
The error associated to anchor point from pipeline hot/cold end is due to the fact the tool does not interpolate
the value for anchor point from hot/cold ends and thereby propagates the error to the expansion calculation.
According to chapter 4.1.2.1 the integration method is based on elemental trapezoidal areas, the accuracy of
this method increases as the element mesh is refined. As shown on Table 31, increasing the spacing mitigates
the expansion error from 16 % to 2.4 %. To be noted that the results prompted by the tool are conservative
although not over conservative.
Table 31: Integration Method Refinement Assessment
Parameter
Global Tool
Validated Spreadsheet
Error
0.10 km 0.25 km 0.10 km 0.25 km
Anchor Point from hot end
1300 m 1500 m 1293 m 0.541 % 16.009 %
Expansion at hot end 0.292 m 0.299 m 0.292 m 0.000 % 2.397 %
The lateral buckling screening provides graphical results as the valid spreadsheet, as seen on Table 26,
Table 27 and Table 28 there is coherence in the profiles from both spreadsheets.
The lateral buckling, according to chapter 2.3, has two driven cases for the pipeline straight section and for the
curved sections. The overall effect of these cases are shown on the lateral buckling results and according to the
pipeline routing thereby it is possible to foreseen that the pipeline is susceptible to buckle on its entire length
for all studied cases.

61
For the on-bottom stability module the partial validation is in-line with the industry used software.
Calculations which require integration have associate errors that can be tracked until the integration method
where, as addressed before, the accuracy of the method is dependent on the element length.
The cathodic protection design module delivered trustworthy and realistic design. Deviations are
found between the tool and validated spreadsheet due to the anode sizing which therefore derives from the
anode volume calculation method. The volume calculation approach defined in the tool (equation 123) takes
into accounts several volumes, half shell gap, anti-corrosion coating and fitting tolerances. More over the tool
calculates the net anode mass which is achieved by subtracting the insert material mass (equation 126). This
error is about 9% of the required mass of one anode and propagates in the results that follow. The existing
spreadsheet over-estimates anode volumes while the global tool generates realistic volumes.

62
6. CONCLUSIONS AND FURTHER DEVELOPMENTS
The Oil&Gas service companies’ face nowadays a challenge to reduce its costs and increase its
efficiency by improving the way it works. This thesis presented a new approach to deal with the optimization
required in the pipeline discipline by delivering this engineering tool.
As specified in the objectives for this thesis a final assessment of the achievements is done below:
Development of a rigid pipeline design global tool;
Validation of the tool with existing and discipline validated standards;
Numerical iteration and integration methods delivered trustworthy results.
As said before, the global design tool is the core achievement of this thesis and enhanced the possibility to
integrate all the information, following the actual trend of Oil&Gas companies to increase efficiency. This
application enables to foresee dedicated analysis requirements in an early project stage optimizing the
engineering process.
Also the methodology applied prompted reliable results and in line with the existing standards, best practices
and lessons learned.
The extensive validation performed covered the design modules methodology and the computational approach
developed delivered expected results as any commercial software, having the capability to be improvable and
adjustable.
For conclusion the objectives proposed to develop a global rigid pipeline design tool were achieved.
Further developments for the enhancement of this thesis are proposed by introducing in the tool other
modules, such as:
Pressure calculation module focused to deliver results for the pre-commissioning team.
Other pipeline design codes such as the British Standard PD 8010-2.
Improve computational time by optimizing the VBA code and data interchangeability with Excel
interface.

63

64
7. REFERENCES
[1] DNV-OS-F101, October 2013, Submarine Pipeline Systems, Det Norske Veritas AS
[2] API-RP-1111, December 2009, Design, Construction, Operation and Maintenance of Offshore
Hydrocarbon Pipelines – Limit State Design, American Petroleum Institute
[3] SAFEBUCK JIP III, October 2014, Safe Design of Pipelines with Lateral Buckling Design Guideline
[4] DNV-RP-F109, October 2010, On-Bottom Stability Design of Submarine Pipelines, Det Norske Veritas AS
[5] DNV-RP-H103, February 2014, Modelling and Analysis of Marine Operations, Det Norske Veritas AS
[6] Ochi, M.K. and Hubble, E.N., 1976, Six Parameter Wave Spectra, Coastal Engineering, Chapter 18, p.301-
328
[7] DNV-RP-F103, October 2010, Cathodic Protection of Submarine Pipelines by Galvanic Anodes, Det
Norkse Veritas AS
[8] Uhlig, H.H. and Revie, R.W., 1985, Corrosion and Corrosion Control, 3rd edition, New York, John Wiley
and Sons, p.421-423
[9] ISO-15589-2, May 2014, Petroleum, Petrochemical and Natural Gas Industries – Cathodic Protection of
Pipeline Systems Part 2: Offshore Pipelines
[10] ASME B36.10M, August 2015, Welded and Seamless Wrought Steel Pipe, American Society of
Mechanical Engineers
[11] API 5L, July 2000, Specification for Line Pipe, American Petroleum Institute

65

66
8. APPENDIX
All the results for this dissertation are presented in this chapter.
Appendix A gathers the validation reports generated by the Global Tool.

67
APPENDIX A

68

69

70

71

72

73

74

75

76

77

78

79

80

81

82

83

84

85

86

87

88
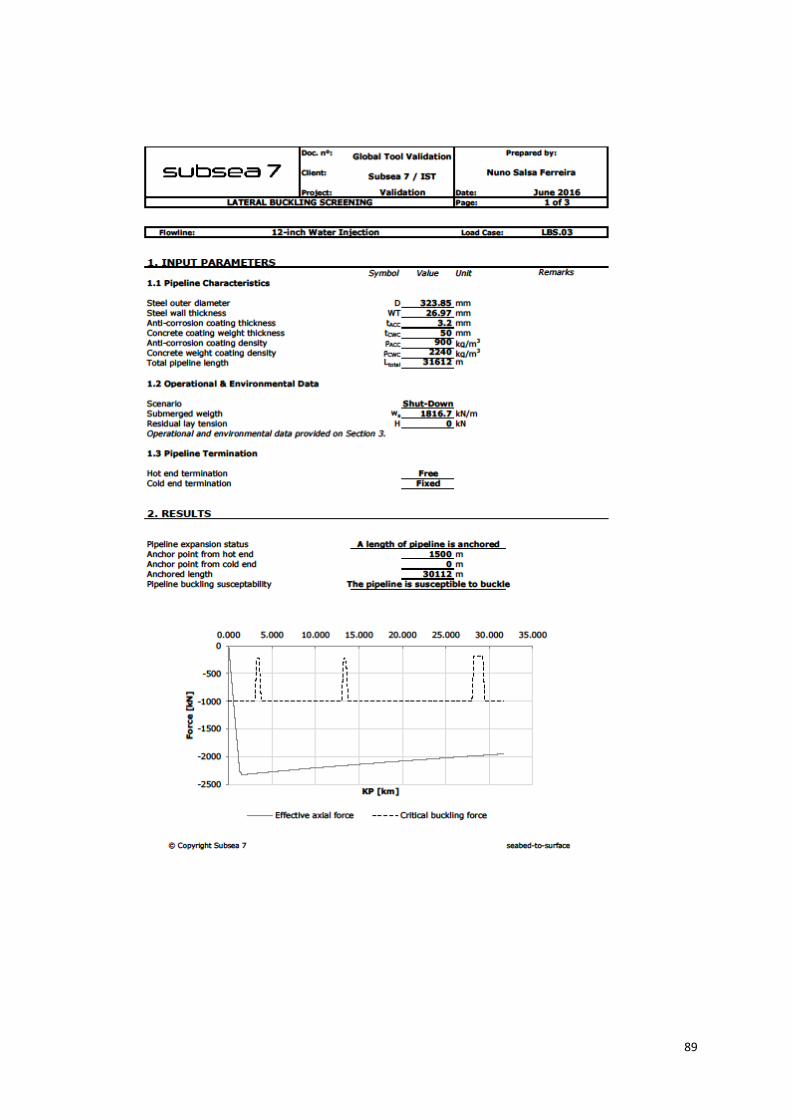
89

90

91

92

93
Top Related