
Wireless AI based industrial security robot
21
CONTENTS CHAPTER 1: PREAMBLE.......................................................................................................6 1.1 Introduction ........................................................................................................................ 6 1.2 Existing system ……………... .......................................................................................... 6 1.3 Proposed Project…………………….. ...............................................................................7 CHAPTER 2: LITERATURE SURVEY..................................................................................8 CHAPTER 3: PROJECT DESCRIPTION ..............................................................................10 3.1 Overview ............................................................................................................................10 3.2 Block diagram…….............................................................................................................11 CHAPTER 4:COMPONENT DESCRIPTION……………………………………………...12 4.1 Software ..................................................................... ……………………......................12 4.2 Hardware…………………………………………………………………………………13 CHAPTER 5: IMPLEMENTATION………………………………………………………..18 5.1 Expected Experiment Result……………………………………………………………..19 CHAPTER 6: 6.1 ADVANTAGES ………………………………………………………………………21 6.2 DISADVANTAGES ………………………………………………………………...21 CHAPTER 7:APPLICATIONS……………………………………………………………..22 CHAPTER 8: CONCLUSION……………………………………………………………....23 CHAPTER 9:BIBLIOGRAPHY…………………………………………………………….24
Transcript of Wireless AI based industrial security robot

CONTENTS CHAPTER 1: PREAMBLE.......................................................................................................6
1.1 Introduction ........................................................................................................................ 6
1.2 Existing system ……………... .......................................................................................... 6
1.3 Proposed Project…………………….. ...............................................................................7
CHAPTER 2: LITERATURE SURVEY..................................................................................8
CHAPTER 3: PROJECT DESCRIPTION ..............................................................................10
3.1 Overview
............................................................................................................................10
3.2 Block
diagram…….............................................................................................................11
CHAPTER 4:COMPONENT DESCRIPTION……………………………………………...12
4.1 Software .....................................................................
……………………......................12
4.2 Hardware…………………………………………………………………………………13
CHAPTER 5: IMPLEMENTATION………………………………………………………..18
5.1 Expected Experiment Result……………………………………………………………..19
CHAPTER 6:
6.1 ADVANTAGES ………………………………………………………………………21
6.2 DISADVANTAGES ………………………………………………………………...21
CHAPTER 7:APPLICATIONS……………………………………………………………..22
CHAPTER 8: CONCLUSION……………………………………………………………....23
CHAPTER 9:BIBLIOGRAPHY…………………………………………………………….24

ABSTRACT
In any industry, a large fraction of the work is repetitive and judicious application of
automation will most certainly result in optimum utilization of machine and manpower.
Here our ROBOT plays a vital dual role. They work from an overhead grid with a rectangular
work envelope. They are mainly used to perform ‘pick and place’ actions. Intelligence robot is
developed to detect dangerous Gas/Smoke by using an 32 bit microcontroller. In our project
the robot is designed to move automatically. The robot acts according to the command given
by the program. It will move all the direction like forward, reverse, right and left. The Smoke
sensing unit is available in robot mechanism. If particular Smoke is detected, robot will switch
ON the Alarm Unit. The video and audio are monitored at the control unit. For transmitting
audio and video, RF camera has been used.

Chapter 1 PREAMBLE
1.1 Introduction
A robot is an electro-mechanical device that can perform autonomous or pre-programmed
tasks. A robot may act under the direct control of a human (eg. the robotic arm of the space
shuttle) or autonomously under the control of a programmed computer. Robots may be used
to perform tasks that are too dangerous or difficult for humans to implement directly (e.g.
nuclear waste clean up) or may be used to automate repetitive tasks that can be performed
with more precision by a robot than by the employment of a human (e.g. automobile
production.)
As of today Robotics is the vast field to explore the things without human
intervention. The word robot is used to refer to a wide range of machines, the common
feature of which is that they are all capable of movement and can be used to perform physical
tasks. Robots take on many different forms, ranging from humanoid, which mimic the human
form and way of moving, to industrial, whose appearance is dictated by the function they are
to perform. Robots can be grouped generally as mobile robots (eg. autonomous vehicles),
manipulator robots (eg. industrial robots) and self reconfigurable robots, which can conform
themselves to the task at hand.
1.2 EXISTING
The project is to design and develop an intelligence robot to detect dangerous
Gas/Smoke by using an 8 bit microcontroller.
The robot acts according to the command given by the controller.
To move in all the direction like forward, reverse, right and left.
If any gas/smoke detected, robot will switch ON the Alarm Unit.
The video and audio are monitored at the remote PC.
For transmitting audio and video, RF camera has been used.

RS-232 is used for interfacing at transmitting and receiving end.
1.2 Proposed Idea
A robot is designed and constructed with associated electronic circuits to move into
an unknown location and transport the details of that unknown area to a home place. The
Robot will have inbuilt sensors and cameras to achieve this.
The system is made more useful by introducing artificial intelligence to it. By
artificial intelligence, we are designing the robot is such a manner that in situation which
require decision making, the robot identifies the presence of the obstacle, alerts the user and
moreover awaits instruction from the user for the further action or it will take action by its
own. Other condition, which the robot can determine, is presence of fire, Humidity, smoke,
high temperature and gas.
Here we are using GSM modem to get an alerting SMS regarding abnormal
conditions in that environment.
This project is divided into modules for better understanding of the circuit. The modules
include
ARM 7 Microcontroller Board
Humidity Sensor
Gas Sensor
Intruder Sensor
Fire Sensing Unit
ZIGBEE Transceiver
GSM Modem

CHAPTER 2
LITERATURE SURVEY
ADVANCED EMBEDDED WIRELESS ROBOT WITH MOTION
DETECTION SYSTEM AND LIVE VIDEO / AUDIO TRANSMISSION By MA.WAJEED1, K. VARUN KUMAR2 International Journal of Communication Network Security, ISSN:
2231 – 1882, Volume-2, Issue-2, 2013
Embedded systems are finding increasing application not only in domestic application but also
in areas of industrial automation, automobiles, power electronic, and defense and space
equipments. 8051 are the modern building blocks for many embedded systems.The available
8-bit versions manufactured by Intel, Motorola, Philips, Atmel, etc., They are available in the
market with various configurations for different applications.
A robot is an apparently human automation, intelligent and obedient but impersonal machine.
Basically, a robot is a machine designed to do ahuman job that is tedious, slow or hazardous.
It is
only relatively recently that robots have started to employ a degree of Artificial Intelligence
(AI) in their work - many robots required human operators, or precise guidance throughout
their missions. Slowly, robots are becoming more and more autonomous. This project is to
design and develop an intelligence robot by using an 8 bit microcontroller. In our project the
robot is designed to move automatically. The robot acts according to the command given by
the program. It will move all the direction like forward, reverse, right and left. The video and
audio are monitored at the control unit. For transmitting audio and video, RF camera has been
used. In this prototype project we design in such a way that this robot can be moved anywhere.
This project is very much useful in the places where a human cannot go in to the places like
ground canals, Smoke oriented caves, etc., and this project is very much useful in such
situations.
In our project, the robot is designed to move by our command.. The robot acts according to the
command given by the program. It will move all the direction like forward, reverse, right and
left. The video and audio are monitored at the control unit. In this prototype project, we design
in such a way that this robot can be moved anywhere and it can get the information of particular
place.
Wireless Surveillance Robot with Motion Detection and Live Video
Transmission by A.Sivasoundari, S.Kalaimani, M.Balamurugan.

International Journal of Emerging Science and Engineering (IJESE) ISSN: 2319–6378, Volume-I, Issue-6 April 2013
Automatic motion detection features are able to enhance surveillance efficiency and
quality. The aim of this paper is to recognize and detect motion automatically around a robot's
environment in order to equip a mobile robot for a surveillance task. The robot design has
been partitioned into sensor, control, and planning subsystems. A robotic system has a drive
chassis having a drive motor and a drive element to control both the robot movements and the
rotation of wireless camera. Microcontroller PIC16F877 is designed to ensure that robot is
always oriented towards desired position. The required information is based on the input
obtained from a Charge Coupled Device (CCD) with battery of 12v. As the first step toward
achieving the goal, it is necessary to have a mobile robot for the detection of motion of any-
thing, any gas leakages and the presence of heat in that particular unstructured environment.
REMOTEC is now commercializing the SURBOT technology on wheeled mobile robot for
used in places such as nuclear power plants, atomic power plants and other hazardous
environments.
The PIC16F77 microcontroller not only controls all the hardware components of the system, it
also communicates with Visual Basic interface through a RF communication using Profilic
USB communication port. Sensors effectively identify the motion, gas, fire and metals
promoting surveillance features. Also designing a Visual Basic interface is intuitive enough for
the user to control the robot in an effective manner.
A. Future Scope
There are a number of improvement and modification that can be designed and increase real
world application practically and functionally, they are:
By adopting the aeronautical mechanism in our surveillance robot, it can act as a flying robot.
The robot uses RF communication for simpler task; tis should be changed by wireless
communication using GSM technology. Further the communication between PC and the robot
can be promoted by utilizing the principles of Wi-Fi

CHAPTER 3
PROJECT DESCRIPTION
In this project we will be developing a GUI screen with a VB technology. The visual Studio is
a tool which is developed by Microsoft , is used to develop the GUI. The robot is been
controlled through a PC. The serial port of PC is used to communicate to a robot using a
wireless technology called as zigbee.
The robot has a pick and place Arm , camera, fire detector, smoke detector, humidity
sensor, GSM modem. The camera will transmit a live streaming which will be viewed in PC.
The camera is been controlled by the ARM 7 controller. From the PC you could control the
camera position. The camera is been working under I2C Protocol, which i2c is a 2 wire
communication system.
The I2C has a SDL (serial data line) and SCL (serial clock line).The I2C is a multi master
communication Protocol, in which SCL is been controlled by the master. I2C is also bi-
directional. This is implemented by an “Acknowledge” system. The “Acknowledge” system or
“ACK” system allows data to be sent in one direction to one item on the I2C bus, and then, that
item will “ACK” to indicate the data was received.
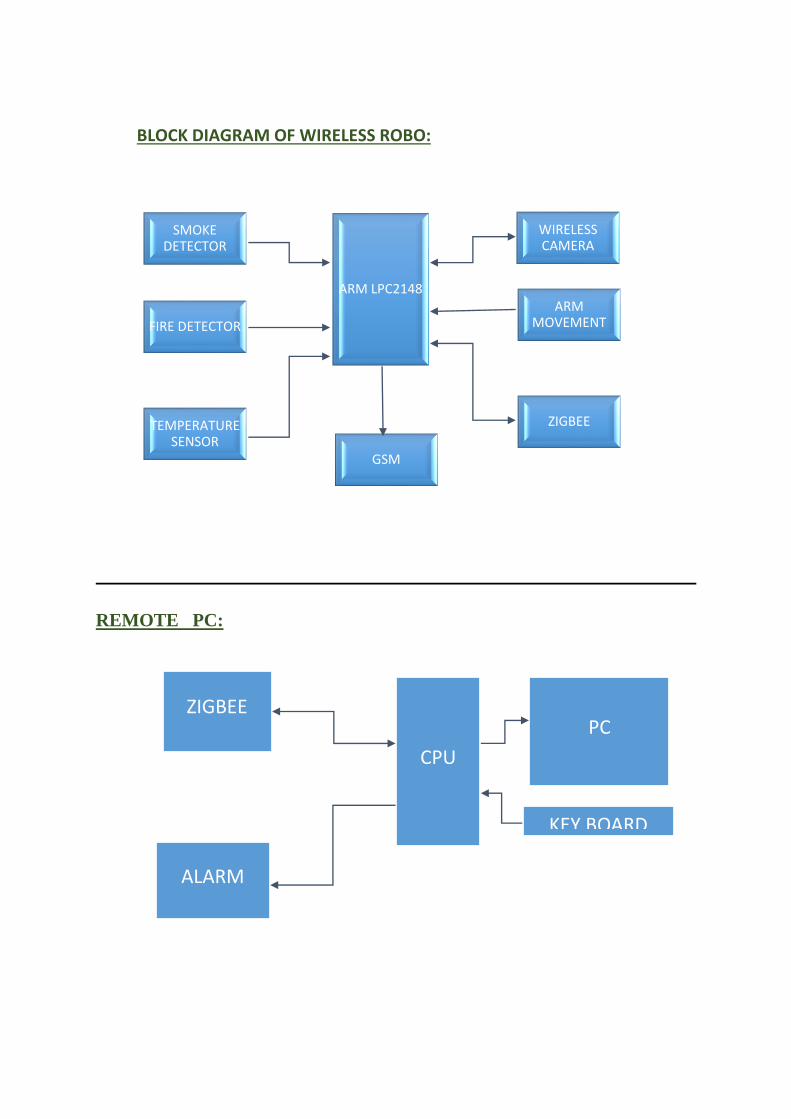
REMOTE PC:
SMOKE DETECTOR
ARM LPC2148
FIRE DETECTOR
WIRELESS CAMERA
TEMPERATURE SENSOR
GSM
ARM MOVEMENT
ZIGBEE
CPU
PC
ZIGBEE
ALARM
KEY BOARD
BLOCK DIAGRAM OF WIRELESS ROBO:

CHAPTER 4
COMPONENTS DESCRIPTION
4.1 Software Description
4.1.1 Keil IDE
The Keil MDK-ARM Microcontroller Kit is a complete software development environment
for the wide range of ARM, Cortex-M, and Cortex-R based microcontroller devices. MDK
includes the µVision IDE/debugger, ARM C/C++ Compiler, and essential middleware
components. It's easy to learn and use. Keil C51 is the industry-standard tool chain for all 8051-
compatible devices, it supports classic 8051, Dallas 390, NXP MX, extended 8051 variants,
and C251 devices. The µVision IDE/Debugger integrates complete device simulation,
interfaces to many target debug adapters, and provides various monitor debug solutions.
4.1.2 Visual Basic
A programming language and environment developed by Microsoft. Based on the BASIC
language, Visual Basic was one of the first products to provide a graphical programming
environment and a paint metaphor for developing user interfaces. Instead of worrying about
syntax details, the Visual Basic programmer can add a substantial amount of code simply
by dragging and dropping controls, such as buttons and dialog boxes, and then defining their
appearance and behaviour.
Although not a true object-oriented programming language in the strictest sense,
Visual Basic nevertheless has an object-oriented philosophy. It is sometimes called an event-
driven language because each object can react to different events such as a mouse click.
Since its launch in 1990, the Visual Basic approach has become the norm for programming
languages. Now there are visual environments for many programming languages,
including C, C++, Pascal, and Java. Visual Basic is sometimes called a Rapid Application
Development (RAD) system because it enables programmers to quickly build prototype
applications.

4.2 Hardware description
4.2.1 Gas/smoke sensors
FEATURES:
* High sensitivity to LPG, natural gas , town gas
* Small sensitivity to alcohol, smoke.
* Fast response . * Stable and long life * Simple drive circuit
APPLICATION:
They are used in gas leakage detecting equipments in family and industry, are suitable for
detecting of LPG, natural gas , town gas, avoid the noise of alcohol and cooking fumes and
cigarette smoke
SENSITVITY ADJUSTMENT:
Resistance value of MQ-5 is difference to various kinds and various concentration gases. So,
When using this components, sensitivity adjustment is very necessary. we recommend that
you calibrate the detector for1000ppm H2 or LPG concentration in air and use value of Load
resistance ( RL) about 20 KΩ(10KΩ to 47KΩ).
When accurately measuring, the proper alarm point for the gas detector should be determined
after considering the temperature and humidity influence.
4.2.2 Fire sensor
Description
The Fire sensor is used to detect fire flames . The module makes use of Fire sensor and
comparator to detect fire up to a range of 1 meters.
Feature
Allows your robot to detect flames from upto 1 M away
Typical Maximum Range :1 m .
Calibration preset for range adjustment.
Indicator LED with 3 pin easy interface connector.
Input Voltage +5VDC
4.2.3 Zigbee Module
CC2500 RF Module is a transreceiver module which provides easy to use RF
communication at 2.4Ghz. It can be used to transmit and receive data at 9600 baud rates from
any standard CMOS/TTL source. This module is a direct line in replacement for your serial
communication it requires no extra hardware and no extra coding toIt works in Half Duplex
mode i.e. it provides communication in both directions, but only one direction at same time
Features:
· Supports Multiple Baud rates ( 9600 )
· Works on ISM band (2.4 GHz)
· No complex wireless connection software or intimate knowledge of RF is required to
connect our serial devices.
· Designed to be as easy to use as cables.
· No external Antenna required.
· Plug and play device.
· Works on 5 DC supply.
Applications:
· Wireless Sensor Network.
· Wireless Device Control.
· Wireless Data Transfer.
· Wireless Energy Metering
· Home Automation
4.2.4 Camera Sensor General Description The C3038 is a 1/3” color sensor module with digital output. It uses
Omni Vision’s CMOS image sensor OV6630. Combining CMOS technology together with
an easy to use digital interface makes C3038 a low cost solution for higher quality video
image application. The digital video port supplies a continuous 8/16 bit-wide image data
stream. All camera functions, such as exposure, gamma, gain, white balance, color matrix,
windowing, are programmable through I2C interface.
Features: � 101,376 pixels, CIF/QCIF format � Small size : 40 x 28 mm � Lens: f=3.6mm
� 8/16 bit video data : ITU601, ITU656, ZV port � Read out - progressive � Data format -
YCrCb 4:2:2, GRB 4:2:2, RGB � I2C interface � Electronic Exp / Gain / White balance
control � Image enhancement - brightness, contrast, gamma, saturation, sharpness, window,
etc � Internal / external synchronization scheme � Frame exposure / line exposure option �
Wide dynamic range, anti blooming, zero smearing � 3.3V operation � Low power
dissipation � M ono composite video signal output (50Hz)
4.2.5 LPC2141/42/44/46/48
General description
The LPC2141/42/44/46/48 microcontrollers are based on a 16-bit/32-bit ARM7TDMI-S
CPU with real-time emulation and embedded trace support, that combine microcontroller
with embedded high speed flash memory ranging from 32 kB to 512 kB. A 128-bit wide
memory interface and a unique accelerator architecture enable 32-bit code execution at
the maximum clock rate. For critical code size applications, the alternative 16-bit Thumb
mode reduces code by more than 30 % with minimal performance penalty.
Due to their tiny size and low power consumption, LPC2141/42/44/46/48 are ideal for
applications where miniaturization is a key requirement, such as access control and
point-of-sale. Serial communications interfaces ranging from a USB 2.0 Full-speed device,
multiple UARTs, SPI, SSP to I2C-bus and on-chip SRAM of 8 kB up to 40 kB, make these
devices very well suited for communication gateways and protocol converters, soft
modems, voice recognition and low end imaging, providing both large buffer size and high
processing power. Various 32-bit timers, single or dual 10-bit ADC(s), 10-bit DAC, PWM
channels and 45 fast GPIO lines with up to nine edge or level sensitive external interrupt
pins make these microcontrollers suitable for industrial control and medical systems.
Features
16-bit/32-bit ARM7TDMI-S microcontroller in a tiny LQFP64 package.
8kB to 40kB of on-chip static RAM and 32kB to 512kB of on-chip flash memory.
128-bit wide interface/accelerator enables high-speed 60 MHz operation.
In-System Programming/In-Application Programming (ISP/IAP) via on-chip boot
loader
software. Single flash sector or full chip erase in 400 ms and programming of
256 bytes in 1ms.
Embedded ICE RT and Embedded Trace interfaces offer real-time debugging with
the
on-chip Real Monitor software and high-speed tracing of instruction execution.
USB 2.0 Full-speed compliant device controller with 2kB of endpoint RAM.
In addition, the LPC2146/48 provides 8kB of on-chip RAM accessible to USB by
DMA.
One or two (LPC2141/42 vs. LPC2144/46/48) 10-bit ADCs provide a total of 6/14
analog inputs, with conversion times as low as 2.44 ƒÊs per channel.
Single 10-bit DAC provides variable analog output (LPC2142/44/46/48 only).
Two 32-bit timers/external event counters (with four capture and four compare
channels each), PWM unit (six outputs) and watchdog.
Low power Real-Time Clock (RTC) with independent power and 32 kHz clock
input.
4.2.6 GSM Module
This is a plug and play GSM Modem with a simple to interface serial interface. Use it to send
SMS, make and receive calls, and do other GSM operations by controlling it through simple
AT commands from micro controllers and computers. It uses the highly popular SIM300
module for all its operations. It comes with a standard RS232 interface which can be used to
easily interface the modem to micro controllers and computers.

The modem consists of all the required external circuitry required to start experimenting with
the SIM300 module like the power regulation, external antenna, SIM Holder, etc.
Features
Uses the extremely popular SIM300 GSM module
Provides the industry standard serial RS232 interface for easy connection to
computers and other devices
Provides serial TTL interface for easy and direct interface to microcontrollers
Power, RING and Network LEDs for easy debugging
Onboard 3V Lithium Battery holder with appropriate circuitry for providing backup
for the modules’ internal RTC
Can be used for GSM based Voice communications, Data/Fax, SMS,GPRS and
TCP/IP stack
Can be controlled through standard AT commands
Comes with an onboard wire antenna for better reception.
Board provides an option for adding an external antenna through an SMA connector
The SIM300 allows an adjustable serial baud rate from 1200 to 115200 bps (9600
default)
Modem a low power consumption of 0.25 A during normal operations and around 1 A
during transmission
Operating Voltage: 7 – 15V AC or DC (board has onboard rectifier
CHAPTER 5
IMPLEMENTATION
In this project we introduce a wireless industrial security robot with pick and place and live
video transmission, we are making use of :
Visual basics to design a GUI ,which includes the control of the wireless robot
A temperature sensor is used to measure the temperature in that region.
A smoke and fire sensor is used to detect any gas leakage or fire accidents
A wireless cam is used to give a live video stream to a remote user
A mechanical Arm is used to pick and place objects
A Zigbee transceiver is used for wireless communication

The implementation of ZigBee based wireless sensor networks, which has been applied
in our service robot intelligent space successfully. A simplified ZigBee stack is
proposed and the primitives of simplified ZigBee based wireless sensor networks are
illustrated, which reduces the stack, thus the storage, size and cost of the nodes was
brought down. To show the functionality of the ZigBee based wireless sensor networks
in service robot intelligent space, we describe some of the components in detail, such
as environmental sensors for environmental perception, home devices controllers for
device control, localization system for positioning and ceiling projector for mobile
robot navigation.
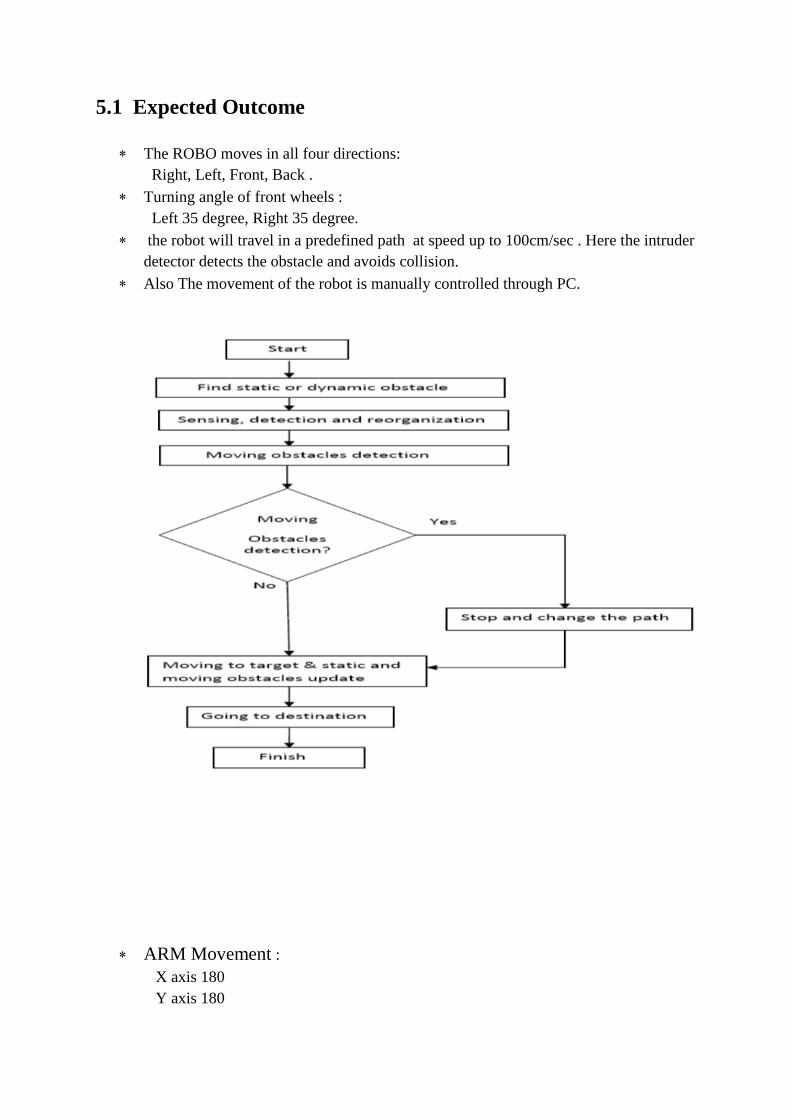
5.1 Expected Outcome
The ROBO moves in all four directions:
Right, Left, Front, Back .
Turning angle of front wheels :
Left 35 degree, Right 35 degree.
the robot will travel in a predefined path at speed up to 100cm/sec . Here the intruder
detector detects the obstacle and avoids collision.
Also The movement of the robot is manually controlled through PC.
ARM Movement :
X axis 180
Y axis 180

Totally 360 degree can achieved by movement of ROBO
SENSORS:
The sensors are continuously sensing the surrounding parameters, if any parameters
exceeds the set point alarm signal is sent to remote PC .
The related SMS is sent to a mobile phone through GSM modem like,
“HIGH GAS “ , “FIRE!!!” etc.
Camera rotation :
X-axis :- 360
360 degree camera rotation is achieved using stepper motor and transmit live
streaming.
CHAPTER 6
6.1 ADVANTAGES
Ours is a Wireless ROBOT with Wireless Movements.
Ours is an industrial ROBOT, Controlled by the PC.
It is also a Mobile Robot which has got certain artificial intelligence feature .
Our ROBOT will pick the Objects and will place it in another place.
Another unique concept about our ROBOT is that it can sense any fire and detect
the fire.
Consistency of performance.
24/7 continuous working.
Reduced cycle times.
Reduced amount of operator errors.
Improved quality of product.
6.2 DISADVANTAGES
High standard of maintenance required
Precise programming needed (time, training, specialist knowledge)
when computer systems failure will cause breakdown
New products require complete reprogramming
Certain processes still need a skilled operator
Complex and expensive equipment to buy and install

CHAPTER 7
APPLICATIONS
Paper industries.
Cotton industries.
Chemical industries.
PCB manufacturing units.
Textile industries.
Furnace manufacturing units.
Oil refineries.
Mining industries.

CHAPTER 8
CONCLUSION
In our project, the robot is designed to move by our command. The robot acts according to the
command given by the program. It will move all the direction like forward, reverse, right and
left. The video and audio are monitored at the control unit. In this prototype project, we
design in such a way that this robot can be moved anywhere and it can get the information of
particular place. This project is very much useful in the places where a human cannot go into
the places like ground canals, smoke oriented caves and this project is very much useful in
such situations. An alerting message will be sent to a prescribed SIM using GSM module.If
particular direction we will give according to that only our robot will move and that
movement will be seen by camera. So that it`s easy to detect any faults or dangerous in the
industry. It leads easy process without interaction of human.
CHAPTER 9
BIBLIOGRAPHY
ADVANCED EMBEDDED WIRELESS ROBOT WITH MOTION DETECTION SYSTEM AND
LIVE VIDEO / AUDIO TRANSMISSION by MA.WAJEED, K. VARUN KUMAR -
International Journal of Communication Network Security, ISSN: 2231 – 1882,
Volume-2, Issue-2, 2013. (base paper).
Mobile Robot in Coal Mine Disaster Surveillance by Mr. Sabarish Chakkath ,
S.Hariharansiddharath , B.Hemalatha -IOSR Journal of Engineering (IOSRJEN) e-ISSN:
2250-3021, p-ISSN: 2278-8719, www.iosrjen.org Volume 2, Issue 10 (October 2012),
PP 77-82.
Wireless Surveillance Robot with Motion Detection and Live Video Transmission by
A.Sivasoundari, S.Kalaimani, M.Balamurugan -International Journal of Emerging
Science and Engineering (IJESE) ISSN: 2319–6378, Volume-I, Issue-6 April 2013.
Design and Automation of Security Management System for Industries Based On
M2M Technology by Swathi Bhupatiraju, J V Subrahmanyeswara Rao -International
Journal of Computer Engineering Science (IJCES) Volume 2 Issue 3 (March 2012) ISSN
: 2250:3439.
AUTOMATED ADVANCED INDUSTRIAL and HOME SECURITY USING GSM and FPGA by
N.Chinthaih,K.Rajshekar - International Journal of Computer Science and Information
Technologies, Vol. 2 (4) , 2011, 1598-1602.
.Develop a Multiple Interface Based Fire Fighting Robot by Ting L. Chien , Kuo Lan Su
and Sheng Ven Shiau - IEEE International Conference on Robotics and Automation,,
vol.3, pp.2084-2086.


















