When and Where: Deep diving into Wireless...
27
When and Where: Deep diving into Wireless Localization Dr. Domenico Giustiniano Computer Engineering and Networks Laboratory (TIK) Communication Systems Group (CSG) Introduction Localize me! This class covers the system designs and trade-offs of pervasive positioning methods and their underlying technologies, focusing on mobile positioning. D. Giustiniano When and Where Introduction What application? Location is at the core of a number of high-value Location-Based Services (LBS) on smarthphones: navigation, social applications, emergency response, advertisements, sport. E.g. Social check-in (Foursquare ), Friends-find APP (Google Latitude ) key for emerging applications personalized experiences in games and theme parks augmented reality. D. Giustiniano When and Where Introduction Once upon a time...(I) In 1998, the FCC rolled out phase I of E911: carriers should identify the originating call’s phone number and the location of the cell tower, accurate to within a mile. (Automatic Location Identification (ALI)). In 2001, the FCC rolled out phase 2 of E911 FCC required that each carrier in the US must detect the caller’s location within 100 meter accuracy. GPS was not an option at that time. D. Giustiniano When and Where
Transcript of When and Where: Deep diving into Wireless...

When and Where: Deep diving into Wireless Localization
Dr. Domenico Giustiniano
Computer Engineering and Networks Laboratory (TIK)Communication Systems Group (CSG)
Introduction
Localize me!
This class covers the system designs and trade-offs of pervasive positioningmethods and their underlying technologies, focusing on mobile positioning.
D. Giustiniano When and Where
Introduction
What application?
Location is at the core of a number of high-value Location-Based Services(LBS) on smarthphones:
navigation, social applications, emergency response, advertisements,sport.
E.g. Social check-in (Foursquare), Friends-find APP (Google Latitude)
key for emerging applications
personalized experiences in games and theme parksaugmented reality.
D. Giustiniano When and Where
Introduction
Once upon a time...(I)
In 1998, the FCC rolled out phase I of E911:
carriers should identify the originating call’s phone number andthe location of the cell tower, accurate to within a mile.
(Automatic Location Identification (ALI)).
In 2001, the FCC rolled out phase 2 of E911
FCC required that each carrier in the US must detect the caller’slocation within 100 meter accuracy.GPS was not an option at that time.
D. Giustiniano When and Where

Introduction
Once upon a time...(II)
LBS were initially launched in Japan:
July 2001: Docomo → pre-GPS handsets.December 2001: KDDI → first mobile phones with GPS.
1st mobile LBS search application launched by AT&T in May 2002
It used ALI.
The users were able to use ALI to:
determine their locationfind list of search query results near their location
(restaurants, hospitals, etc.).
D. Giustiniano When and Where
Introduction
Market Growth
Two main key success factors:growing adoption of GPS devices and smartphone adoption.
D. Giustiniano When and Where
Introduction
LBS APPs
source: “http://www.skyhookwireless.com/locationapps/”
D. Giustiniano When and Where
Introduction
LBS by Category
D. Giustiniano When and Where

Introduction
Paid versus Free LBS
D. Giustiniano When and Where
Introduction
Where am I? What’s around me?
Example: MyLocation from Google (Maps)
Available for outdoor navigation, and partially for indoor navigation.
Adding new indoor maps to public buildings across the world.
In Switzerland, already available in some locations, including:
Sihlcity (Zurich)Airport Center, Zurich Airport
D. Giustiniano When and Where
Introduction
Absolute location
Our focus is to determine the absolute location. We distinguish:
Positioning, estimation of the position.
Navigation, where besides the position, also velocity, heading,acceleration and angular rates are estimated
Target tracking, where another object’s position is to be estimatedbased on measurements of relative range and angles.
D. Giustiniano When and Where
Introduction
Main technologies
Positioning technologies of mobile devices fall in three main categories:
1 GNSS (Global Navigation Satellite System)
2 Network-based positioning systems (Cellular, Wi-Fi, Bluetooth, ...)
3 Inertial tracking systems
D. Giustiniano When and Where

Metrics
Metrics
D. Giustiniano When and Where
Metrics
Metrics: Accuracy
The most important requirement of positioning systems.
Performance metric: mean distance error E [e]
For each sample: Euclidean distance e between the estimated locationp =
(x , y , z
)and the true location p =
(x , y , z
).
Accuracy
E [e] = E [‖p − p‖] = E [√(
x − x)2
+(y − y
)2+(z − z
)2]
D. Giustiniano When and Where
Metrics
Accuracy of GPS, WPS and GSM
In tests with clear view of sky:
GPS is more accurate than WPSWPS=WiFi-based positioning system from Skyhook.
GSM-based positioning has an error as high as 300 m.
source: “Energy-efficient rate-adaptive GPS-based positioning for smarthphones”, Mobisys 2010
D. Giustiniano When and Where
Metrics
GPS in urban areas
source: “Energy-efficient rate-adaptive GPS-based positioning for smarthphones”, Mobisys 2010
D. Giustiniano When and Where

Metrics
Accuracy of GPS versus ground truth
source: “Energy-efficient rate-adaptive GPS-based positioning for smarthphones”, Mobisys 2010
D. Giustiniano When and Where
Metrics
Example using Android Wingle APP and Google Fusion
D. Giustiniano When and Where
Metrics
Metrics: Precision
The precision considersalso the CDF distribution
“Empirical evaluation of the limits on localization using signal strength”, SECON’09
D. Giustiniano When and Where
Metrics
Cost
Computation Cost
Minimise it when location is calculated on mobile devices.Some units (as passive RFID tags) are completely energy passive.
Hardware Cost
Mobile units may have tight space and weight constraints.A positioning system that uses a technology already for communicationdoes not have hardware cost.
D. Giustiniano When and Where

Metrics
Other metrics
Power Consumption
Keeping GPS activated continuously would drain the battery on asmartphone in less than 6− 11 hours.
Response time
it should be sufficiently fast to allow to track mobile targets.
Required infrastructure
none, markers, passive tags, active beacons, pre-existing or dedicated,local or global.
Coverage area
single room, building, city, global.
D. Giustiniano When and Where
Metrics
Pinpoint position?
Accuracy (m)
Response time (ms)
Power Consumption (mW)
Figure: Kiviat diagram
No single location technology exhibits high accuracy, low response time,low consumption, low cost and universal coverage for every situation.
D. Giustiniano When and Where
Technologies: GPS
Technologies: GPS
D. Giustiniano When and Where
Technologies: GPS Principles of GPS
What is GPS?
The Global Positioning System (GPS) is a satellite-based navigationsystem
made up of a network of 24 satellites placed into orbit between 1978and 1994 by US.
GPS satellites send signals for civilian use at the 1.575 Ghz frequency.
Satellites are positioned so that every location of the earth’s surfacehas access to four satellites 24 h a day.
Satellites orbit the earth in 12 hours.
33 satellites in orbit as of March 2008.
A set of ground stations monitor the satellites’ trajectory and health,and send the satellite parameters to the satellites.
D. Giustiniano When and Where

Technologies: GPS Principles of GPS
source: “http://www.n2yo.com/”
D. Giustiniano When and Where
Technologies: GPS Principles of GPS
GPS signal modulation (I)
Carrier modulated with a Pseudo-Random Noise (PRN) code
unique to each satellite.37 suitable codes (GOLD codes).
Code multiplexing: PRN allows to use a single receiver for receivingthe signal of multiple satellites.
D. Giustiniano When and Where
Technologies: GPS Principles of GPS
GPS signal modulation (II)
Modulated additionally with a navigation message
with almanac data and its precise ephemeris data.
D. Giustiniano When and Where
Technologies: GPS Principles of GPS
Navigation data
A full data packet from a satellite broadcast is 30 sec long, containing 5six-second-long frames.
Ephemeris data are the orbit parameters for the satellite andsatellite’s predicted trajectory as a function of time.Almanac data consists of coarse orbit and status information for eachsatellite in the constellation.
Used for easier acquisition of further satellites.
D. Giustiniano When and Where

Technologies: GPS Principles of GPS
How the receiver calculates its position (I)
Each GPS satellite has an on-board atomic clock and includes thetimestamp [time sent] of the signal it broadcasts (HOW).
GPS signals take from 64 to 89 ms to travel from a satellite to theEarth’s surface.
The receiver decodes the satellite timestamp, and hence it knowswhen the signal was transmitted.
A GPS receiver also keeps track of time (with its clock) of thereceived signal [time received].
D. Giustiniano When and Where
Technologies: GPS Principles of GPS
How the receiver calculates its position (II)
Coarse estimation:Compute tp by using [time sent] and [time received] at packet level.
Accuracy is in the order of ms.
Fine estimation:Compute the sub-millisecond part of tp at PRN code level, measuringthe time shift tp between the local copy and received PRN code.
Figure from P. Steemkiste, CMU
D. Giustiniano When and Where
Technologies: GPS Principles of GPS
How the receiver calculates its position (III)
A GPS receiver acquires each GPS satellite’s signal by correlating thesignal it receives with a local copy of the satellite’s PRN code.
Acquisition requires shifting the copy both in time (distance) andfrequency (Doppler effect).
source: “Energy Efficient GPS Sensing with Cloud Offloading”, Sensys 2012
D. Giustiniano When and Where
Technologies: GPS Principles of GPS
How the receiver calculates its position (IV)
d = ctp: Speed of light is known, and hence the distance from eachsatellite to the receiver (called pseudoranges) is estimated.
Trilateration algorithms are finally applied to calculate the position ofthe GPS receiver.
D. Giustiniano When and Where

Technologies: GPS Principles of GPS
Cold and Hot Start
Time-To-First-Fix (TTFF)
Time required for a GPS receiver to acquire satellite signals and navigationdata, and calculate its position.
Cold start is the TTFF, while starting without initial position, time,almanac and ephemeris.
50− 300 sec
Warm start, when the receiver has a previous lock to the satellites, itcan start from the previous Doppler shift and code phases.
Hot start is the TTFF starting with initial position, time, almanacand ephemeris.
4− 30 sec
50 bps data rate explains why a standalone GPS takes some time for TTFF
D. Giustiniano When and Where
Technologies: GPS Principles of GPS
Assisted GPS (A-GPS)
A-GPS allows for hot start by sending almanac and ephemeris datavia an additional communication channel to a GPS receiver
e.g. using a cellular network or WiFi.
After a hot start, TTFF depends on how fast a GPS receiver can tuneto the carrier frequencies (shifted due to Doppler effect) andsyncronize with their signals.
It is in the order of tens of sec when target moves, less when it is static.
However, it does not improve positioning accuracy.
D. Giustiniano When and Where
Technologies: GPS Principles of GPS
Real-time differential GPS
Using commercial off-the-shelf hardware: precision of 7.8 m in 95%
due to systematic and nonsystematic errors.
Differential methods or military GPS receivers can minimize some ofthe systematic errors
accuracy up to 0.3 m.
They correct bias errors at one location with measured bias errors ata known position
Tower or satellite (Wide Area Augmentation System (WAAS).
However Differential GPS is quite expensive.
D. Giustiniano When and Where
Technologies: GPS Principles of GPS
Trilateration algorithms
D. Giustiniano When and Where

Technologies: GPS Principles of GPS
Range-based schemes
Triangulation = working with angles
Measuring the angle with respect to reference points and a referencedirection.
Those angles determine rays.
Their intersection gives the triangulation point.
Trilateration = working with distances
Measuring distances to reference points.
They intersect in the trilateration points.
GPS uses trilateration!
D. Giustiniano When and Where
Technologies: GPS Principles of GPS
Basic notions of trilateration
Lateration is the most common method for deriving the location of awireless device.
For example, GPS uses trilateration.
Two steps are involved: ranging and lateration.1 The distance (range) to the anchors is calculated.2 The location of the wireless device is estimated based on these
distances.
D. Giustiniano When and Where
Technologies: GPS Principles of GPS
GPS Time-of-Flight
The (xi , yi , zi ) components of i-th satellite position and the time sentare (xi , yi , zi , ti ).
The message traveled at the speed of light c .
It reaches the destination at time tr ,
The distance traveled is (tr + b − ti )c .
b = bc represents the clock bias b [µs] of receiver in terms of distance.
D. Giustiniano When and Where
Technologies: GPS Principles of GPS
Pseudorange
Pseudorange equation
ρi = ||si − p||+ b + v
ρi is measured for each satellite i .
si and p are the position of the i-th satellite and receiver.
v is the pseudorange measurement noise,
modeled as white noise.
b solved along with the position of the receiver.
D. Giustiniano When and Where

Technologies: GPS Principles of GPS
One, two, three, four satellites: the GPS case
Figure from P. Steemkiste, CMU
D. Giustiniano When and Where
Technologies: GPS Principles of GPS
Log example
12 10 10 8 35 40.0000000 0 11G21G31G29G12S26G 2G24G14G30G10S24
24574152.706 -444467.323 4727.657 43.000
21467975.296 -292886.318 3094.940 38.000
20093222.765 -184619.4132 1943.763 33.000
22340274.564 111703.3453 -1188.122 29.000
37651336.056 -125084.9782 1334.439 34.000
22827576.606 11482.5643 -138.480 29.000
20880239.835 -161500.549 1694.054 37.000
24004670.329 160075.6813 -1697.439 26.000
24636015.072 -462005.7093 4914.218 28.000
25127098.314 -221143.4543 2326.690 28.000
37391651.426 -120954.5962 1269.244 35.000
D. Giustiniano When and Where
Technologies: GPS Data fitting
Data fitting
D. Giustiniano When and Where
Technologies: GPS Data fitting
Main algorithms for trilateration positioning
The most used approaches for trilateration positioning:
Non-Linear Least Square (NLS).Bayes filters such as Extended Kalman filtering (EKF) methods.
There are 4 unknowns:
the coordinate of receiver position and the clock bias.
NLS is largely used to calculate these unknowns.
EKF for tracking and sensor fusion.
D. Giustiniano When and Where
Technologies: GPS Data fitting
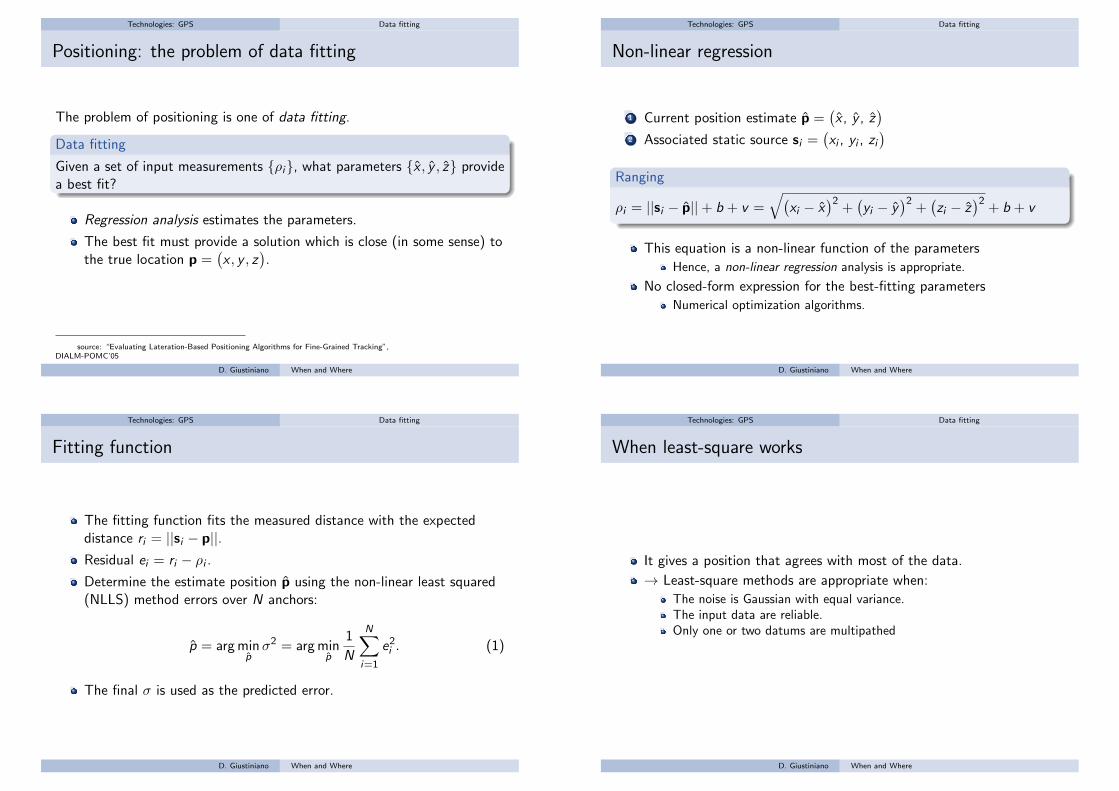
Positioning: the problem of data fitting
The problem of positioning is one of data fitting.
Data fitting
Given a set of input measurements {ρi}, what parameters {x , y , z} providea best fit?
Regression analysis estimates the parameters.
The best fit must provide a solution which is close (in some sense) tothe true location p =
(x , y , z
).
source: “Evaluating Lateration-Based Positioning Algorithms for Fine-Grained Tracking”,DIALM-POMC’05
D. Giustiniano When and Where
Technologies: GPS Data fitting
Non-linear regression
1 Current position estimate p =(x , y , z
)2 Associated static source si =
(xi , yi , zi
)Ranging
ρi = ||si − p||+ b + v =√(
xi − x)2
+(yi − y
)2+(zi − z
)2+ b + v
This equation is a non-linear function of the parameters
Hence, a non-linear regression analysis is appropriate.
No closed-form expression for the best-fitting parameters
Numerical optimization algorithms.
D. Giustiniano When and Where
Technologies: GPS Data fitting
Fitting function
The fitting function fits the measured distance with the expecteddistance ri = ||si − p||.Residual ei = ri − ρi .Determine the estimate position p using the non-linear least squared(NLLS) method errors over N anchors:
p = arg minpσ2 = arg min
p
1
N
N∑i=1
e2i . (1)
The final σ is used as the predicted error.
D. Giustiniano When and Where
Technologies: GPS Data fitting
When least-square works
It gives a position that agrees with most of the data.
→ Least-square methods are appropriate when:
The noise is Gaussian with equal variance.The input data are reliable.Only one or two datums are multipathed
D. Giustiniano When and Where

Technologies: GPS Data fitting
Why is multipath a problem?
Multipath causes a positive bias in the estimate distance
An over-estimation of the actual distance to the source.
Solutions:
PHY processing can alleviate severe multipath effects.data fitting function sufficiently robust to multipath.
NLOS
LOS
d2 > d1
d1
D. Giustiniano When and Where
Technologies: GPS Data fitting
INLR
Iterative NLR (INLR) repeatedly remove outliers
(measurement with the greatest residual).
It computes a new non-linear model computed using the remainingdata.
Iterative process until fit (value σ) is good enough.
INLR gets better accuracy (and good multipath rejection) but it iscomputationally expensive.
D. Giustiniano When and Where
Technologies: GPS Data fitting
Linearization: LLS algorithm
The Linear Least Square (LLS) approach linearizes the NLS problem,
by introducing a constraint in the formulation
It obtains a closed form expression of the estimated location.
“Handbook of Position Location: Theory, Practice, and Advances - Chap. 12: On the Performance ofWireless Indoor Localization Using Received Signal Strength”, Wiley Library
D. Giustiniano When and Where
Technologies: GPS Data fitting
Starting with the N ≥ 2 equations to estimate the position (x , y):(x1 − x)2 + (y1 − y)2 = d2
1
(x2 − x)2 + (y2 − y)2 = d22
...
(xN − x)2 + (yN − y)2 = d2N
(2)
and subtracting the constraint
1
N
N∑i=1
[(xi − x)2 + (yi − y)2] =1
N
N∑i=1
d2i
from both sides of each equation, the above can be rewritten as Ap = b.
D. Giustiniano When and Where

Technologies: GPS Data fitting
LLS
A =
x1 − 1
N
∑Ni=1 xi y1 − 1
N
∑Ni=1 yi
......
xN − 1N
∑Ni=1 xi yN − 1
N
∑Ni=1 yi
(3)
D. Giustiniano When and Where
Technologies: GPS Data fitting
LLS
b =1
2
(x21 − 1
N
∑Ni=1 x2
i ) + (y 21 − 1
N
∑Ni=1 y 2
i )
−(d21 − 1
N
∑Ni=1 d2
i )
...
(x2N −
1N
∑Ni=1 x2
i ) + (y 2N −
1N
∑Ni=1 d2
i )
−(d2N −
1N
∑Ni=1 d2
i )
(4)
A only function of anchors’ coordinates.
b function of distances to anchors together with anchors’ coordinates.
p = (ATA)−1ATb
D. Giustiniano When and Where
Technologies: GPS Data fitting
Pros and Cons of LLS algorithm
LLS is popular for ease of implementation.
It is highly susceptible to outliers.
LLS solution can serve as the starting point for the nonlinear leastsquares problem.
source: “Evaluating Lateration-Based Positioning Algorithms for Fine-Grained Tracking”,DIALM-POMC’05
D. Giustiniano When and Where
Technologies: GPS Extended Kalman filter
Extended Kalman filter
D. Giustiniano When and Where
Technologies: GPS Extended Kalman filter
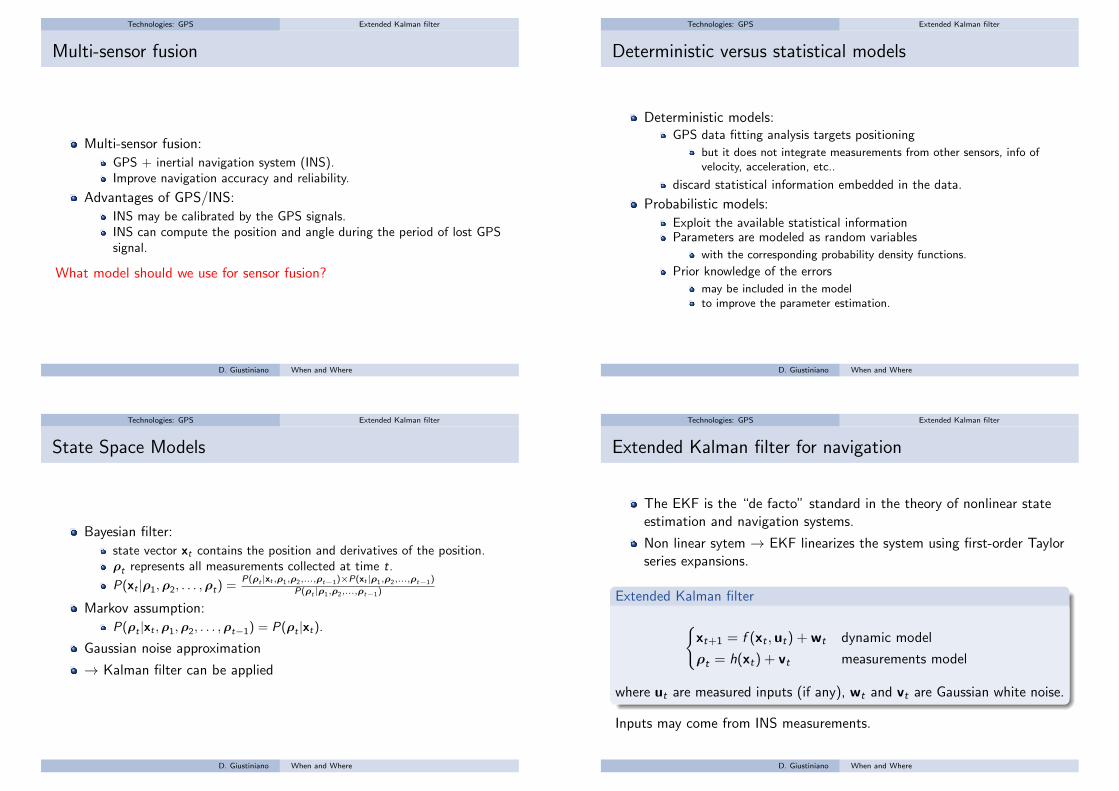
Multi-sensor fusion
Multi-sensor fusion:
GPS + inertial navigation system (INS).Improve navigation accuracy and reliability.
Advantages of GPS/INS:
INS may be calibrated by the GPS signals.INS can compute the position and angle during the period of lost GPSsignal.
What model should we use for sensor fusion?
D. Giustiniano When and Where
Technologies: GPS Extended Kalman filter
Deterministic versus statistical models
Deterministic models:GPS data fitting analysis targets positioning
but it does not integrate measurements from other sensors, info ofvelocity, acceleration, etc..
discard statistical information embedded in the data.
Probabilistic models:
Exploit the available statistical informationParameters are modeled as random variables
with the corresponding probability density functions.
Prior knowledge of the errors
may be included in the modelto improve the parameter estimation.
D. Giustiniano When and Where
Technologies: GPS Extended Kalman filter
State Space Models
Bayesian filter:
state vector xt contains the position and derivatives of the position.ρt represents all measurements collected at time t.
P(xt |ρ1,ρ2, . . . ,ρt) =P(ρt |xt ,ρ1,ρ2,...,ρt−1)×P(xt |ρ1,ρ2,...,ρt−1)
P(ρt |ρ1,ρ2,...,ρt−1)
Markov assumption:
P(ρt |xt ,ρ1,ρ2, . . . ,ρt−1) = P(ρt |xt).
Gaussian noise approximation
→ Kalman filter can be applied
D. Giustiniano When and Where
Technologies: GPS Extended Kalman filter
Extended Kalman filter for navigation
The EKF is the “de facto” standard in the theory of nonlinear stateestimation and navigation systems.
Non linear sytem → EKF linearizes the system using first-order Taylorseries expansions.
Extended Kalman filter
{xt+1 = f (xt ,ut) + wt dynamic model
ρt = h(xt) + vt measurements model
where ut are measured inputs (if any), wt and vt are Gaussian white noise.
Inputs may come from INS measurements.
D. Giustiniano When and Where

Technologies: GPS Extended Kalman filter
Design of Kalman filter for navigation
Dynamic model: linear.
Measurement model: non-linear.
(cartesian coordinates).
To achieve good filtering results:
Complete a priori knowledge of both the dynamic model andmeasurement model.Both the dynamic and the measurements are corrupted by zero-meanGaussian white noise.Initial estimate of the state is correct.The errors is within the “linear region”
accurate sensors or sensors with high update ratescovariance doesn’t propagated through linearization
D. Giustiniano When and Where
Technologies: GPS Extended Kalman filter
State vector
We denote:
vt = [vx ,t vy ,t vz,t ]T as the receiver’s velocity.
b [m] and d [m/s] as the clock bias and clock drift.
If the velocity vt is measurable → xt = [xt yt zt b d ]T .
D. Giustiniano When and Where
Technologies: GPS Extended Kalman filter
Dynamic and measurement model
Dynamic Model
For a sampling period Ts , the discrete time model f (xt) is:
f (xt) =
pt + Tsvt
b + Tsd
d
(5)
Masurement model
Using the pseudorange equation: h(xt) = ||si ,t − pt ||+ b
D. Giustiniano When and Where
Technologies: GPS Extended Kalman filter
Linearization
Functions f (xt) and h(xt) are linearized to get the state transition matrixF and the measurement matrix H of an ordinary Kalman filter.
Linearization
xp = f (xt) provides linearization point (and predicted state estimate).
F = dfdxt
∣∣xp
linearizes the state equation.
H = dhdxt
∣∣xp
linearizes the measurement equation.model).
The filter then updates the state, as a normal Kalman filter:xo = xp + Kt(ρt − h(xp)), where Kt is the Kalman gain.
D. Giustiniano When and Where

Technologies: GPS Extended Kalman filter
Example using Matlab script, with logs of pseudorange and satellites’position
D. Giustiniano When and Where
Technologies: GPS GPS error
GPS error
D. Giustiniano When and Where
Technologies: GPS GPS error
GDOP: Geometric Dilution of Precision (I)
It measures how correlated are the pseudorange information:
GDOP =∆OutputLocation
∆MeasuredData.
It is a measure based solely on:the geometry of the satellitesclock-related components of the navigation solution.
(a) Low GDOP (b) High GDOP
source: “Dilution of Precision”, GPS World, 1999
D. Giustiniano When and Where
Technologies: GPS GPS error
GDOP: Geometric Dilution of Precision (II)
Ideally small changes in the measured data will not result in largechanges in output location.
When visible GPS satellites are close together in the sky, thegeometry is weak and the GDOP value is high.
When far apart, the geometry is strong and the DOP value is low(ideally DOP = 1).
D. Giustiniano When and Where

Technologies: GPS GPS error
HDOP
GDOP is often divided up into components Horizontal DOP (HDOP)and Vertical DOP (VDOP).
These componets are used because the accuracy of the GPS systemmay vary with the component.For example horizontal position can usually be measured moreaccurately than vertical position.
An HDOP of 6 or less → location error less than 12 m.
source: “Energy-Accuracy Aware Localization for Mobile Devices”, Mobisys 2010
D. Giustiniano When and Where
Technologies: GPS GPS error
GPS error in smarthphones (I)
The horizonal position error of GPS eGPS is:
eGPS =√
e2xGPS + e2
yGPS
exGPS and eyGPS are random variables that give the error in longitudeand latitute and have a normal distribution with zero mean.σrms =
√σ2xGPS + σ2
yGPS is the root mean square (RMS).
Assuming the same variance σ2 in both directions:
eGPS is Rayleigh distributed:
Pr (eGPS < r) = 1− exp
(− r 2
2σ2
)= 1− exp
(− r 2
σ2rms
)
“GPS/Galileo testbed using a high precision optical positioning systems”, SIMPAR ’10 and“Performance of collaborative GPS localization in pedestrian ad hoc networks”, Mobiopp ’12
D. Giustiniano When and Where
Technologies: GPS GPS error
GPS error in smarthphones (II)
When r = σrms , Pr (eGPS < σrms) ≈ 0.63.
Hence 63% of the errors fall within a circle of radius σrms .
σrms is referred as distance root-mean-square (dRMS).
Value that most GPS receivers report as their localization error.
Other receivers report 2dRMS,
r = 2σrms ,where 98% of the errors fall.
D. Giustiniano When and Where
Technologies: GPS GPS error
dRMS and HDOP
HDOP =
√σ2x+σ2
y
σ2r
= dRMSσr→ dRMS = σr · HDOP
where σ2r is the variance of pseudorange observations.
E [eGPS ] (accuracy) can be estimated from the error reported by GPSreceivers.
For Rayleigh distribution:
E [eGPS ] = σ√
π2 = dRMS
√π
2 .
D. Giustiniano When and Where
Technologies: GPS GPS sensitivity
GPS sensitivity
D. Giustiniano When and Where
Technologies: GPS GPS sensitivity
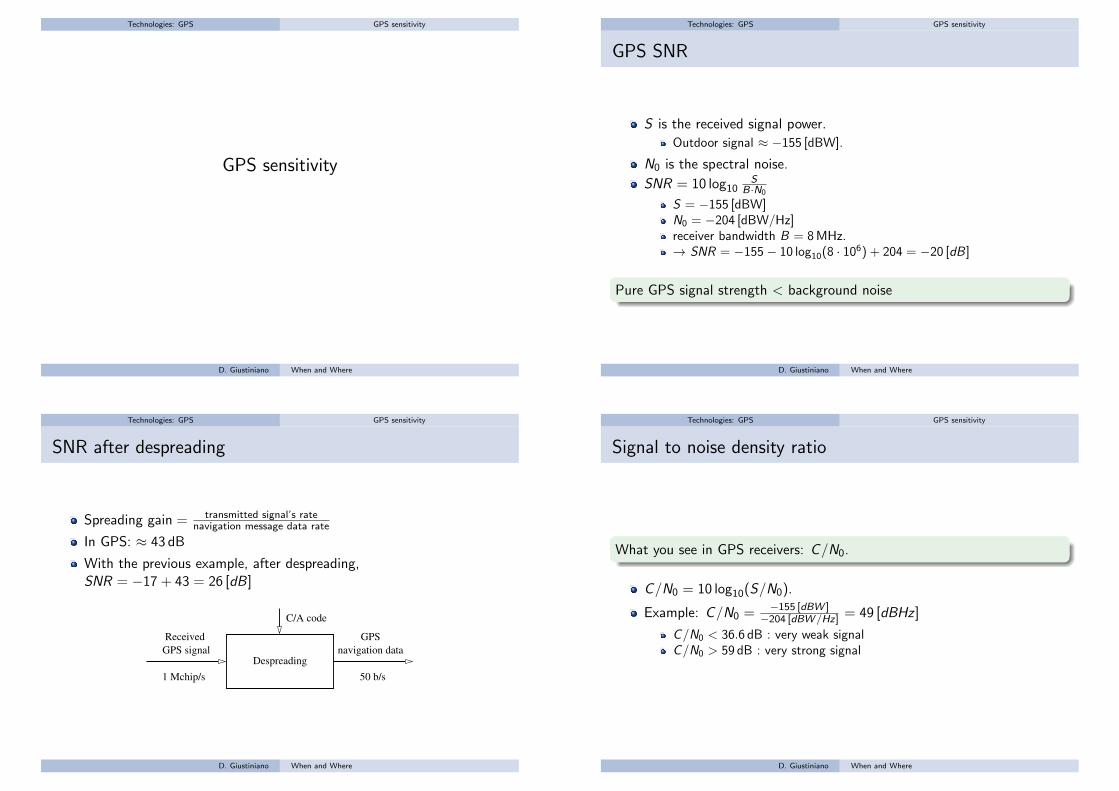
GPS SNR
S is the received signal power.
Outdoor signal ≈ −155 [dBW].
N0 is the spectral noise.
SNR = 10 log10S
B·N0
S = −155 [dBW]N0 = −204 [dBW/Hz]receiver bandwidth B = 8 MHz.→ SNR = −155− 10 log10(8 · 106) + 204 = −20 [dB]
Pure GPS signal strength < background noise
D. Giustiniano When and Where
Technologies: GPS GPS sensitivity
SNR after despreading
Spreading gain = transmitted signal’s ratenavigation message data rate
In GPS: ≈ 43 dB
With the previous example, after despreading,SNR = −17 + 43 = 26 [dB]
Despreading
C/A code
Received
GPS signal navigation data
GPS
50 b/s1 Mchip/s
D. Giustiniano When and Where
Technologies: GPS GPS sensitivity
Signal to noise density ratio
What you see in GPS receivers: C/N0.
C/N0 = 10 log10(S/N0).
Example: C/N0 = −155 [dBW ]−204 [dBW /Hz] = 49 [dBHz ]
C/N0 < 36.6 dB : very weak signalC/N0 > 59 dB : very strong signal
D. Giustiniano When and Where

Technologies: GPS GPS sensitivity
GPS indoor
GPS doesn’t provide pervasive coverage
But this situation may change due to
high-sensitivity receivers (HSGPS).Galileo system.
GPS sensitivity for HSGPS:
−190 dBW for tracking.−175 dBW for acquisition.
D. Giustiniano When and Where
Technologies: GPS GPS sensitivity
Precision of HSGPS with hot-start
But (not shown here) lower accuracy with cold start (or not sync at all)and TTFF from a few seconds to minutes.
Source: “Indoor Position using GPS revisited”, Pervasive 2010
D. Giustiniano When and Where
Pervasive localization
Pervasive localization
D. Giustiniano When and Where
Pervasive localization
Towards pervasive positioning system
How can we improve the accuracy, time response, coverage, etc. of ourpositioning system?
GPS is aided by other technologies.
Let’s look at the principles that make them complementary to GPS!
D. Giustiniano When and Where

Pervasive localization Technologies: Inertial Tracking
Technologies: Inertial Tracking
D. Giustiniano When and Where
Pervasive localization Technologies: Inertial Tracking
Inertial Tracking
Use electronic accelerometers, compasses, and altimeters.
Sense movement and direction in 2D and 3D.
dead-reckoning → relative positions
(w.r.t. given fixed point).
position error grows with time and distance in the absence of:
position fixesfusion with other sensorscontext information (e.g., map)
Outdoor, but not indoorGPS is unreliable indoors,
rendering dead-reckoning based approaches useless.
D. Giustiniano When and Where
Pervasive localization Technologies: Inertial Tracking
Example
Positioning error can reach 5% of the distance travelled, in favorableconditions even 1% to 2%.
Source: “In Step with INS”, GPS World Magazine 2002
D. Giustiniano When and Where
Pervasive localization Technologies: Inertial Tracking
Accelerometer
An accelerometer measures all accelerations.
except those accelerations due to gravity.
An accelerometer indicates:
≈ 1g upwards, when at rest relative to the Earth’s surface.0g, during any type of free fall in a vacuum.
D. Giustiniano When and Where
Pervasive localization Technologies: Inertial Tracking
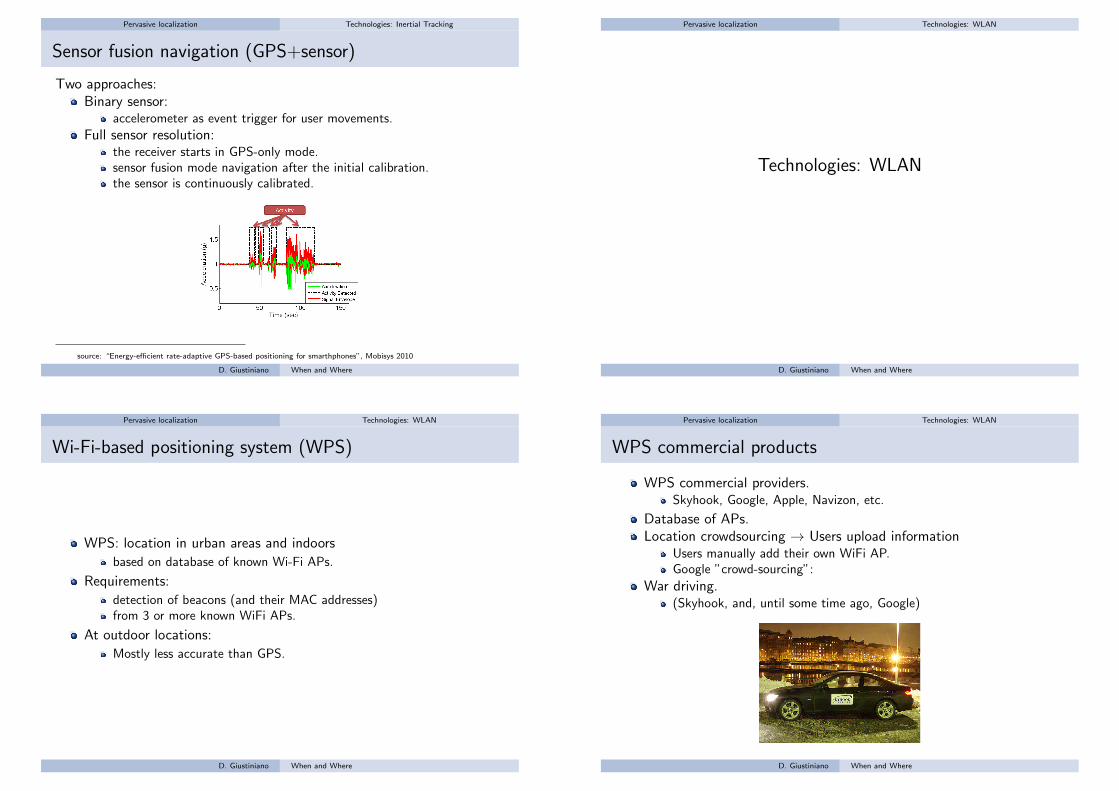
Sensor fusion navigation (GPS+sensor)
Two approaches:Binary sensor:
accelerometer as event trigger for user movements.
Full sensor resolution:the receiver starts in GPS-only mode.sensor fusion mode navigation after the initial calibration.the sensor is continuously calibrated.
source: “Energy-efficient rate-adaptive GPS-based positioning for smarthphones”, Mobisys 2010
D. Giustiniano When and Where
Pervasive localization Technologies: WLAN
Technologies: WLAN
D. Giustiniano When and Where
Pervasive localization Technologies: WLAN
Wi-Fi-based positioning system (WPS)
WPS: location in urban areas and indoors
based on database of known Wi-Fi APs.
Requirements:
detection of beacons (and their MAC addresses)from 3 or more known WiFi APs.
At outdoor locations:
Mostly less accurate than GPS.
D. Giustiniano When and Where
Pervasive localization Technologies: WLAN
WPS commercial products
WPS commercial providers.Skyhook, Google, Apple, Navizon, etc.
Database of APs.Location crowdsourcing → Users upload information
Users manually add their own WiFi AP.Google ”crowd-sourcing”:
War driving.(Skyhook, and, until some time ago, Google)
D. Giustiniano When and Where

Pervasive localization Technologies: WLAN
Wingle WarDriving
Free database.
Over 74 million network beacons seen.
What happened after Jan-Mar 2010?!?
D. Giustiniano When and Where
Pervasive localization Technologies: WLAN
Key Hindrances
It requires a lot of hotspots.Mobile hotspots (Tethering mode).High dependence on Internet connectivity.Bad when moving fast (i.e. driving).Location database must be dynamically updated
to capture changing AP positions (everyday?).
D. Giustiniano When and Where
Pervasive localization Technologies: Cell Tower
Technologies: Cell Tower
D. Giustiniano When and Where
Pervasive localization Technologies: Cell Tower
LTE positioning protocol (LPP)
Cellular network is already successfully used
for A-GPS and cell ID positioning.
LTE is defining three new positioning methods:
Network-assisted GNSS methods.Enhanced cell ID method.Downlink positioning.
D. Giustiniano When and Where

Pervasive localization Technologies: Cell Tower
Network-assisted GNSS
Network-assisted GNSS.
It uses GPS to determine the positions of mobile device equippedwith GPS receivers.
Two types of assistance data are provided:
Data assisting the measurements.Data assisting position calculation.
D. Giustiniano When and Where
Pervasive localization Technologies: Cell Tower
Enhanced cell ID
It improves the position estimation of Cell ID methods.
Based on Time-of-Advance.
The resolution of the single measurement is 29.4 m.
source: at&t
D. Giustiniano When and Where
Pervasive localization Technologies: Cell Tower
Cell Towers in Zuerich
Rundfunk: Station
Antenne
Mobile communication
(GSM)
Antenne
Mobile communication
(UMTS)
Antenne
Scale 1:44'750
? 20
06 s
wis
stop
o (D
V13
18)
But, we see more than one cell ID in range...
source: http://map.funksender.admin.ch/bakom.php
D. Giustiniano When and Where
Pervasive localization Technologies: Cell Tower
Downlink positioning
DownLink Observed Time (DL-OTDOA)
The mobile device estimates the difference in the arrival times of signalsfrom separate base stations.
Handset position is estimated by intersecting hyperbolic lines.
The base stations have to be time synchronized.
The mobile device must know the geographical coordinates of themeasured base station.
Based on Time-of-Advance as well.
D. Giustiniano When and Where

Pervasive localization Technologies: Sound
Technologies: Sound
D. Giustiniano When and Where
Pervasive localization Technologies: Sound
Sound
Sound propagation speed is much slower than radio.
≈ 343.2 m/s versus ≈ 300 m/µs, 106 times slower !!
No need for high clock rates.
Lower-bound accuracy is due to wavelength (λ).
D. Giustiniano When and Where
Pervasive localization Technologies: Sound
Research directions
Example: Active Bat
Ultrasonic signals and location based on trilateration.Cons: Sound is strongly attenuated through wallsIt needs a bunch of sensors on the ceil(Receivers are placed in a square grid).
Deployment cost is too high
research uses phones for sensing the environment.
source: “The Anatomy of a Context-Aware Application” Mobicom ’99,“SoundSense: Scalable Sound Sensing ...”, Mobisys 2009 and“Indoor Localization without Infrastructure using the Acoustic Background Spectrum”, Mobisys 2011.
D. Giustiniano When and Where
Energy-efficient navigation
Energy-efficient navigation
D. Giustiniano When and Where

Energy-efficient navigation
Power Consumption
0.37 W of power consumed by GPS.
In another study, 0.23 W consumed bya Qualcomm gpsOne in a smartphone.
Keeping GPS activated continuously would drain the battery on asmartphone in less than 6− 11 hours.
source: “Energy-efficient rate-adaptive GPS-based positioning for smarthphones”, Mobisys 2010,“Energy-Accuracy Aware Localization for Mobile Devices”, Mobisys 2010
D. Giustiniano When and Where
Energy-efficient navigation
Reasons behind high GPS consumption
1 Data sent from the satellites at 50 bps.
GPS turned on for up to 30 secs to receive the full data packets fromthe satellites for computing its location.
2 Intensive signal processing to acquire and track satellites
due to weak signal strengths and Doppler frequency shifts
3 Powerful CPU for post-processing and position calculation.
source: “Energy Efficient GPS Sensing with Cloud Offloading”, Sensys 2012
D. Giustiniano When and Where
Energy-efficient navigation
Energy-efficient navigation
Duty cycle GPS used in many real-world applications.
Decide the time interval at which to turn GPS on/off.
GPS actived too often → energy wasted for stationary phone.GPS activated too infrequently → accuracy will suffer.
D. Giustiniano When and Where
Energy-efficient navigation
Power Consumption
Figure: The accelerometer consumes 0.08 W.
source: “Energy-efficient rate-adaptive GPS-based positioning for smarthphones”, Mobisys 2010
D. Giustiniano When and Where

Energy-efficient navigation
Energy-efficient approach
Four types of information into account:
1 An error model to model positioning accuracy.
2 Delays associated with powering on and off.3 A profiled power model
to minimize the consumption on a given device.
4 Motion sensing using accelerometer readings
It allows to sense standstill→ GPS can be switched off and position updates are not necessary.
source: “Entracked: energy-efficient robust position tracking for mobile devices”, Mobisys 2009
D. Giustiniano When and Where
Conclusion
Conclusion (I)
Location-based services market is enjoying strong growth.
Several technologies can provide the mobile position
Each of them with its own advantages and disadvantages, in terms ofaccuracy, consumption, time response, etc.
Studied key features of GPS technology
Modulation, messages, acquisition, TTFF, error reported bysmarthphones . . .
Observed how Android phone actually uses GPS and other sensors insome key example.
D. Giustiniano When and Where
Conclusion
Conclusion (II)
We have studied how GPS SNR is computed and what you usuallymeasure with GPS receivers.
Introduced main technologies for positioning.
(not only GPS!).
Main approaches for positioning algorithms.
GPS doesn’t use triangulation!
Data fitting: NLS approach and its variations.
Sensor fusion are extensively used in today’s smartphones.
And EKF is “de facto” standard for navigation.
The need for energy-efficient location-based services.
Still room for improvements.
D. Giustiniano When and Where