The Kinema Tic Synthesis of Steering Mechanisms

of 21
-
Upload
karthikkaru -
Category
Documents
-
view
219 -
download
0
Transcript of The Kinema Tic Synthesis of Steering Mechanisms
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
1/21
The
Kinematic
Synthesis
of
Steering Mechanisms
Jin
Yao
Departnwnt of
Mechanical
Engineering
Sichuan Union University
Chengdu
P.
R.
China
Jorge Angeles
Department of
Mechanical
Engineering
Centre for Intelligent
Machines
McGill
University
817
Sherbrooke
Street
Montreal
Canada
H3A 2K6
angeles®cim mcgill. ca
Abstract
We
propose
a computational kinematics
approach
based
on elimination
procedures
to
syn
thesize
a
steering four bar linkage.
In
this regard
we aim
at minimizing
the
root mean
square
error
of
the synthesized linkage in
meeting
the
steering
condition
over
a
number
of
linkage
con
figurations
within the
linkage range
of
motion.
A
minimization
problem
is thus
formulated
whose
normality
conditions lead
to
two
polynomial
equations
in
two
unknown design
variables.
Upon eliminating one of these two variables
a
monovariate polynomial equation is
obtained
whose roots
yield all
locally optimum linkages.
From these
roots the
global
optimum
as well
as
unfeasible
local
optima are readily
identified.
The
global optimum however turns
out to
be
impractical
because of
the
large differences in its link lengths which
we
refer
to as dimensional
unbalance
To
cope
with this drawback
we
use a
kinematically equivalent
focal
mechanism
i.e.
a six bar linkage with
an
input output function identical to that of the four bar linkage.
Given
that
the synthesized linkage requires
a rotational
input as opposed to
most existing steering
linkages
which
require
a
translational
input we propose
a
spherical
four bar
linkage
to
drive
the
steering linkage.
The
spherical
linkage
is
synthesized
so as to yield
a
speed reduction
as
close as
possible
to
and
to
have
a maximum transmission
quality.
La
synthèse cinématique
des mécanismes de direction
Résumé
Nous
proposons ici
une
approche
de
cinématique algorithmique basée
sur
une
méthode
d’élimination
de
variables qui permet de
synthétiser
un mécanisme de
direction
a quatre barres
articulées. Dans
cette
optique
nous
nous
efforçons
de
minimiser l’erreur quadratique moyenne
dii
mécanisme
obtenu en
vérifiant
la
condition
de
direction dans
urn
grand nombre
de
configura
tions possibles
pour
le
mécanisme
ce
qui mène
a
un probléme
de
minimisation.
Les
conditions
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
2/21
de
‘normalité I cc
dernier donnent lieu a
deux
equations
polynCmiales
a
deux variables
de con
ception
inconnues. L’élimination
de
l’une
de
ces
variables
permet
dobtenir
une seule
equation
polynômiale
a une
seule variable dont
les
racines
rCelles
donnent
tons
les minimums
beaux
Ii
es t
done possible
’en
tirer Ic
minimum global
et de
distinguer
les
minimums inadmissibles
‘ependant. Ic minimum
global
comporte des
longueurs
de
maillons
très
diverses
cc
qui Ic rend
pen
utile. NCanmoins le
concept
de rnécanisme focal
equivalent
a
savoir
un mCcanisme
a
six barres
articulCcs
ayant la
mCme relation entrée-sortie
que le
mCcanisme a quatre barres
permet de remplacer
cc
dernier
par
un
mécanisme
de
proportions
plus
acceptables. Puisque
Ic
mCcanisme
ainsi synthCtisC exige un cut rainement par couple rotoIde.
contrairement
aux
mCcanismes
de
direction
existants qui
exigent
un
entraInement
par couple glissant
nous pro
posons
un
mCcanisme sphérique pour coupler le mouvement
de
l’arbre
de
direction
au
maillon
entrainant du mCcanisme
de direction.
Le mCcanisme
sphCrique en question
est
synthétis
afin
de
donner une relation
entré-sortie
Cquivalente
a
une
transmission par
engrenages
a
reduction
2:
et
une qualitC
de
transmission
optimale.
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
3/21
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
4/21
synthesize
the
spherical
four—bar
linkage, whose
geometry
angles
between neighbouring
axes
is
then
determined
via
a
least-square
procedure
as
well.
2 Kinematic
Synthesis
of
the Steering
Four-Bar
Linkage
Within
the
kinematic synthesis
of
a
steering four-bar
linkage, there is
not
really an
input and
an
output
link,
but
the
two links must
move in a
coordinated fashion
so
as
to comply with
the steer?Tig
condthon.
1nder this condition.
the
two
wheel—carrying
links
are
required
to
move
in
such
a
way
that
the
two
axes
of the wheels.
£
and
M.
of
Fig. 1.
intersect the
rear axis
Al
of
the
vehicle.
Therefore.
these two
links
although
remaining
close to
parallel
upon steering
rotate about
their
vertical
axes
by differing
angles While
this difference is
relatively
small
it is
large enough
to warrant careful
consideration
when designing
the
mechanism.
Moreover, a
steering four-bar
linkage is required to
be
symmetric
since
it turns the
vehicle
both right and
left.
Figure
The wheel-steering
condition
Figure
1,
based
on one given
in
[6],
depicts the
configuration
of
the
wheels under
a
left turn.
According with the steering condition the
axes of
the
two
wheels
must intersect the rear
axis
at
a
common point I. From
that figure the
steering condition is readily obtained.
Indeed
from triangles
ME
and
DIE
we have
1
K
I
E
R
whence
b E
a
tan
DE
a tani9
b
tan
t
a
2
which
is
the
steering
condition
sought.
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
5/21
2.1
The
Set
of
Equations
for
Steering-Linkage
Synthesis
The
steering
condition
of eq.
2 is numerically
unsuitable
because
it
includes
variables
that
can attain
unbounded
values.
A
numerically more
convenient form of
tins
condition
will
be derived.
To
this
end,
we
redraw
Fig.
in
a
more
convenient
form, in
Fig.
2. with the
purpose
of
deriving later
the
input-output equation
of
the
steering
four—bar
linkage in a
more
familiar
layout.
4
D
Figure 2:
Notation
on
the
steering
condition
Now we
write the
steering condition
in terms
of
angles
cii
and
ci
illustrated in
Figs.
I and 2,
thus
obtaining
sin ci
psin
sin
ci2
0
3a
with parameter
p
defined as
p
3b
Equation 3a
is numerically
better behaved
than
eq. 2 ,
for
it
is expressed
in
terms
of
quantities
that
vary
between —
and +1.
Moreover,
the
input-output
equation
of the four-bar
linkage
at
hand
is
written in the
standard form
of
the
Freudenstein equation
[19],
in
terms
of
angles o and
o ,
indicated
in Fig.
3.
This equation
is
k
+
kosa
kos
a
cos ai
4
where
k
k and k
are
dimensionless parameters
defined
as
2
2 2
2
a
+
a
a
+
a
k
—
k—
a
a a
Note that
we
have a
04 , and
hence,
when
the
vehicle
travels along a
straight
course, the mid
planes
of the
two
front
wheels remain
parallel. This
leads
to 0
when
2
0,
while
eq. 4
leads
to
202
sin 3
6
Further.
we
use
the
relation between and
a
with
Q:
and
Q2.
which is
apparent
from
Fig. 3b:
a
=n/2— 3+Qi .
a /2
3—
ó
7
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
6/21
I
B
c
C
iDX
a
a)
Figure 3:
Four-bar linkage
with
the
standard
Freudenstein
notation in
a) a
straight-course configu
ration; b)
an
arbitrary configuration
Now,
let
x
and y
be
the nondimensional coordinates
of
point B
of Fig.
3b, i .e .,
x
=
sin/3 -sin/3 8a )
y =
cos 3
E
cos
8b)
a
It
is
apparent
from Fig.
3
that
neither
x
=
0
nor
y
= 0
can
be accepted as viable solutions. Indeed,
if
y
=
0,
then
3
=
900,
which in the presence of
a
symmetric linkage
produces
a
parallelogram,
whose
input
and output links
sweep
identical angles
and cannot, therefore, generate the steering condition.
If,
in
turn, x
= 0,
then the
linkage becomes a
structure,
with
al l
its joint
centres
aligned.
In
light
of
definitions
8a )
and
8b),
the Freudenstein equation becomes
f
Y
Ax
— Ay
+
Bx
+ Cy +
Dxy
= 0
9a)
where
A 1
—
cos cbi
—
B
2 — cos g1 —
cos 5
C
sin q1
—
sin i),
D
E
2sin q
q5
9b)
Thus, the
new
Freudenstein equation
includes
only
two
geometric
parameters,
and k or,
correspondingly,
x
and
y,
which are
to be
determined
so as to
produce
the
relation between angles
and
112
given
by
the steering condition.
By
virtue
of
the number
of
linkage parameters,
however,
the symmetric four-bar
linkage
at hand cannot
meet
exactly the steering condition
3a ) at more
than
two pairs of
,
t/2
values This linkage however,
can
approximate
more
than
two
pairs of those
values with
a
minimum error if
3
and
k or , equivalently x
and
y,
are
chosen appropriately.
We
then
formulate the
synthesis task
under
discussion as an
optimization
problem:
in
zf mm
lOa)
where
f
denotes function
f 1,
;
x.
y).
defined in eq. 9a), when evaluated at the ith
pair of
,
2
values, and
n
is
the number of such
pairs.
i.e.,
i=1,2,.. . ,n lOb)
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
7/21
with
A,
B a
nd
C,
de
fined
as
the valu
es
att
ained
b
y
4
B,
a
nd
C.
resp
ecti
vely
,
a
t th
e
i
th
pair
of
Qi.
2
v
alue
s
In orde
r to
min
imiz
e
we
ob
tain
the
n
orma
lity
co
nditi
ons of th
e
unc
onst
rain
ed mi
nimi
z tio
n
prob
lem o
f
eq. l
Oa .
i
.e..
24
i’
B,
±
Dy
0
h
a
—2A
y
+
+
D
’x
0
h
lb
It
s
houl
d be n
oted that
th
e
norm
ality
co
nditi
ons are not
orio
us
for
thei
r
ill—conditioned
b
ehav
iour
[20], a
nd he
nce, uns
uitab
le
for a
pur
ely nu
meri
cal
ap
proa
ch; how
ever
we
w
ill
not
pur
sue he
re
s
uch
an a
ppro
ach. Inst
ead,
we
wil
l
res
ort to
e
limi
natio
n proc
edu
res,
wh
ereb
y
th
e n
orm
lity cond
ition
s
offer
the
advantage
of
providing
all
possible
solution
s.
By
the sam
e tok
en, a
n
ume
rica
l
solu
tion of
Pro
blem
lOa yield
s
o
nly one
loc
al
m
inim
um
a
t
a
time
,
t
he
g
loba
l
min
imum
neve
r bein
g
g
uara
nteed
.
ls
o
n
ote tha
t,
is
q
uadr
atic in x an
d
y,
the tw
o fore
goin
g
cond
itio
ns thu
s
bein
g
cub
ic in x
and
y,
and
he
nce,
c
an be ex
pres
sed
as
p
p
X
P3’
P4
0
12
q
q
q
q
0
13
wh
ere
p
and
q
a
re co
nstan
t,
a
ll othe
r coe
ffic
ients
b
eing
pol
ynom
ials
in
y
wit
h
P2
an
d
q
lin
ear,
p
a
nd
q
qu
adra
tic,
and
p
an
d
q4
c
ubic
.
Monovariate
Polynomial
I
n
o
rder
to
so l
ve
e
qs.
12
an
d 13 f
or
x
an
d
y
we
e
limi
nate
on
e
un
know
n fr
om
t
he abo
ve two
eq
uatio
ns,
thu
s de
rivin
g
a
sin
gle
m
ono
vari
ate
po
lyno
mia
l
in
y
who
se
ro
ots yield
all
so
lutio
ns.
We
ai
m here
at
eli
min
ating
x
To this
end
.
we
mu
ltipl
y the
t
wo n
orm
ality
cond
itio
ns
f
irst
b
y x
an
d
th
en
by x
t
here
by p
rodu
cing fou
r
add
ition
al poly
nom
ial
e
quat
ions
,
w
hich
,
tog
ethe
r
w
ith eqs
. 12
and
1
3 , y
ield
six
lin
ear
ho
mog
eneo
us
eq
uatio
ns
i
n
[xm x
x z
i
.e.,
P1 P2
P3 P4
0
0
.x
0
q
q q
q
0 0
x
0
m
P2 P3
P4
0
x 0
0
q
q
q
q
0
0
14
0
0
m P2 P3
P4
I
0
qi
q q
q4
1
0
Obv
ious
ly,
th
e
s
olut
ion
so
ught
can
not b
e
tri
vial,
for the la
st
com
pon
ent of the
unk
nown v
ecto
r
is un
ity. Th
e
c
ondi
tion
fo
r
a
nont
rivia
l sol
ution
to
e
xist
is
t
hat
th
e
d
eterm
ina
nt of
tile co
effic
ient
matr
ix
he
z
ero Upo
n
e
xpan
sion
.
th
e de
term
inan
t
turns
ou
t
t
o he
nom
c in
y
n
ame
ly.
g y
7
6
5
±
r3
+
r
r
ro
0
15
w
r
co
effic
ient
s
{ k
}
a
re
co
nsta
nt. Mo
reov
er, n
otic
e
t
hat
the
solu
tion
0
w
as
al
read
y
found
un
acce
ptab
le, and
hen
ce,
t
he
abo
ve
n
onic equa
tion red
uce
s
to
an
oc
tic
eq
uati
on, i.
e.,
+
7
r6
5
r
4
r3
ro
0
16
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
8/21
2.3
Solution
Procedure
After
solving for
y
from
the foregoing equation
and substituting
it
into
eq. 14 .
we
obtain a
linear
system
of
equations
in
the
powers
of
x
which
thus
ields one
unique
value
of
this variable
fo r
each
of
the
roots
of
eq i6 .
With
x and
y
known,
we obtain
k and
d:
k
arctan
17
x
Moreover,
once a
has been decided on,
based on
the
space available.
03 and
o.
are
determined
04
a
aos
3
18
thereby
completing
the synthesis
procedure.
2.4
Numerical Examples
We illustrate
the
foregoing
procedure with
two
examples
taken
from the
literature,
for
comparison
purposes.
2.4.1
Dudià’s
Linkage
[9]
Let vary from
—40.0°
to
30.89°,
qS
varying
correspondingly
from
—30.89°
to 40.0°,
with
n
40,
and
all
40
points uniformly
spaced
along the
axis.
Moreover,
we
set
p
0.46,
as in
[9],
and
set
a
rn.
Equations
12
and 13 become
now, with six
decimals
displayed,
O.153878x
+
8.964945
+
7.44537y x
±
—2O9.385578y
+
86.606y
+
123.884916 x
—2.48179y
+
8
34.551135y
0
2.48179x
+
—104.691
+
81.60599y x
+
9l 7
7.44537y
+
44.78154 x
+0.153878y
+
6
788567
+
3.177492y
0
In
pursuing
the
monovariate
polynomial
approach, eq. 16
becomes,
with
only
four
decimals
dis
played,
—0.0008y
+ 0.0084y
+ 0.1069y
0.1858y
+0.2130y
0.159y
+
0.O7l6y
0.0149
0
Upon
solving
the foregoing
equation
fo r
y,
we
obtain four
real roots:
1 9117
Th
1.5131. ?J
1 2568
y
1.166
which
are all nondimensional.
Now, we
substitute
the foregoing
values
of
y
into eq. 14 ,
thereby
obtaining,
correspondingly,
four real solutions
for
x:
1.2373,
x
1.9272,
x 3.5746,
z 0 4992
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
9/21
Tab
le
G
eom
etric
al
P
aram
eter
s of the
Lin
kage
s
linkage
m
rn
in
erms
deg
ree
1.0 2
.277
1
].4
745 3
2.91
° 0
.17
2
1 0
2.45
02
2.85
43 51
.86°
0.
08
1
0
3.7
891
6.
1491 70.
63°
0 0
1
1 1
0 1.
2681
0.0
016
23.7
67°
We t
hus f
ind
fou
r
poss
ible
lin
kage
s
pr
oduc
ing
the ste
ering
con
ditio
n w
ith loca
lly—
min
imum
er
ror.
Show
n
i
n Tab
le
are t
he
geom
etri
c
p
aram
eter
s
o
f thes
e link
ages
, usin
g
i
n.
w
ith th
e
corr
espo
ndin
g roo
t-me
an s
quar
e erro
r
s
However,
only
the
first
three
of
the
above solutions are
acceptable, the fourth solution
giving
an
e
xtrem
ely
sh
ort
coup
ler
lin k
,
wh i
ch
y
ield
s
virtu
ally
a
tria
ngle
,
r
ather t
han
a
qu
adri
later
al.
F
or
this
r
easo
n, the c
orre
spon
ding
root
-mea
n s
quar
e error
has not
bee
n com
put
ed, th
e asso
ciate
d
en
try
in
T
abl
e bei
ng f
illed
w
ith
an
aste
risk
.
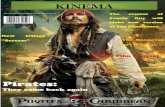
S
how
n
in
Fi
g. 4
are
the
pl
ots of th
e error di
strib
utio
ns
of
the
co
rres
pond
ing
linka
ges
.
Th
ese
h
ave
bet
ter
error
distr
ibut
ions
an
d
sm
alle
r
max
imu
m e
rror
s
ov
er
t
he
wh
ole st
eerin
g moti
on
than th
e linka
ge
obta
ined by D
udiä et
a
l.,
as
sho
wn
in F
ig .
5
It shou
ld
be
note
d t
hat
ha
s neg
ativ
e
len
gth
in
this
exa
mple
.
F
rom t
he
def
initi
on
of
eq.
6 ,
this
m
eans
that th
e
tw
o
lin k
s
A
B and
C
D ar
e
cr
ossed
whe
n t
he
f
our-b
ar
lin k
age is in
its
first po
sitio
n.
A
disc
ussio
n
on
how to
de
al wit
h neg
ativ
e
va
lues
of
or 4
in the
co
ntex
t of
li
nkag
e
syn
thesi
s for fun
ctio
n
gen
erat
ion
is
avail
able in
[19
]
2.4
.2
Fah
ey
and
Ho
usto
n’s L
ink
age [2
]
Th
e
se
cond
e
xamp
le is
that stud
ied
b
y
Fahe
y
and
Hu
ston [2
] in
whic
h
p
0
.6
an
d
th
e fu
ll
mo
tion
ran
ge is
[—
61
°, 4 1°
] Fo
llo w
ing the p
roce
dure
pro
pose
d
h
ere w
e obt
ain fo
ur rea
l
solu
tions
as
well
.
The
er
ror
pl
ot
o
f
the glo
bally
-opt
imu
m
so
lutio
n
is
s
how
n
in
Fi
g.
6
The resu
lt
show
s
tha
t th
e m
axim
um
str
uctu
ral
erro
r i
s
0.7
°
ov
er
t
he r
ange
[—
60° 0]
whi
ch is
much sm
aller
tha
n
th
at obt
aine
d
by
Fa
hey
a
nd
Hu
ston
.
o
f 2.93
°.
Rep
lace
men
t
o
f th
e Fo
ur
ar
Lin
kage w
ith
Its
F
oca
l
S
ix
ar
Equivalent
Al
thou
gh
t
he
f
our-b
ar ste
erin
g link
age
ob
taine
d ab o
ve satis
fies the
ste
ering c
ondi
tion
with hi
gh
ac
cura
cy
its larg
e d
imen
sion
al
unb
alan
ce
its l
arge
st
lin
k
i
s mor
e t
han si
x
time
s
long
er
than
its
s
hort
est
li
nk
ma
kes
it uns
uita
ble
f
or
prac
tica
l
ap
plic
ation
s.
A
s
an
alt
ernat
ive,
a
ki
nem
atica
lly
equi
vale
nt
six-
bar
lin
kag
e is de
rived
be lo
w from
the f
our-
bar lin
kag
e, with
a
bett
er
di
men
sion
al
b
alan
ce.
3
1
A Fou
r Ba
r L
inkag
e
an
d
ts
Foca
l
Six
Bar E
qui
vale
nt
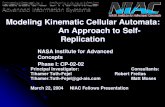
Shown in Fig.
7
are
a
four-bar
lin kage
ABCD
and its
focal
six-bar
equivalent,
APFSDQF, in
wh
ich
and
stan
d
f
or the
ang
ular disp
lace
men
ts o
f
links AB
a
nd CD.
In ord
er
to let
l
ink s A
P and
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
10/21
nkage
/
HnKage 3
-Cl
—
-30
-20 -10
10
20
çb degree
Figure
4:
The error plots
for link g s 1,
2
and
3
of
Table
I
DQ
of
the six-bar
linkage
undergo
the same
angular displacements as AB and CD,
respectively, the
conditions shown below must be
observed [17]:
ab
a b
b d
19a
mn
+
pq
m
n
m +
n
—
p
—
q + d
and
S
mp
19b
d—s
nq
When
the dimensions
a, b c,
and d
of
the four-bar linkage r giv n
and
a
point
S
is
chosen along
line
AD,
a
distance
s
from point A,
we
can reduce
eqs. 19a and
19b
to a
quadratic
equation
in
A
With
A
known,
we
can calculate ni ,
n,
p,
and
q by
means
of
eq. 19a
and
2
— p
+
q
+
m
+
np
+
mnpq m
+
n
+p +
q
—
20
—
mp+nq
Fo r
the
first
example,
a =
b =
2.4502,
c
= 2.8543,
and d
= 1, with all lengths given in
meter;
taking
s
=
0.5 m,
we
have,
for
A =
15.2971,
m n
=
0 .1602 m,
p = q
=
0.6056
m
and
r
=
0.3774
m
for
the
focal six-bar
linkage,
as
shown in Fig.
8,
whereby it
is
apparent that
the
focal
six-bar linkage
is dimensionally
better
balanced
than
the original four-bar linkage.
3.2
General Form
of
the Focal Six-Bar
Linkage
With reference to
Fig.
9,
it
is
possible to
change the position
of
the
fixed
joint
S
of link SF
to 5’
by
a
combination
of
stretching and
rotation of
segment AS.
This
transformation
can
be
obtained,
e.g.,
as
[AS’ j{=LjjASj
21
s’= R s—a)+a
22
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
11/21
6
5[
4.-
0
JO
degree
Figure
5: The
error
plot
of
the
linkage
obtained
by
Dudiça
et
al.
[ ]
where R
is a
rotation
matrix
through
an angle
and
p
is
a
stretching factor.
Then,
the original
six-bar
linkage
PFS
QF
can be
transformed
into the
general
AP’F’F”Q’BS’
linkage. To
this
end,
the
condition
below
must be
satisfied [1,16]:
PF
S
AP’F’S’ and BQFS
BQ’F”S’
23
so
that
the
input-output
relation
between AP.
DQ
an d
AP’, DQ’
remains
unchanged.
When
p
and
p
are
given,
the general
six-bar
linkage
can
be
obtained
from the
position vectors
s’,
p’,
f’,
q’
and
f”,
of points
S’,
P’,
F’,
’
and
F”, respectively,
which
are
given
below:
s’
jtR s
a
+
a
24
p’=
pR p
—a
+ a
25
f’=p
R f—
a +
a
26
S’D
27
SD
q
’=nS
q—
d +
d
28
vS f
d
+
d
29
where S
is a rotation
matrix
through
an angle When
requiring
point
5”
to
he
located on
the
perpendicular bisector
of
A’D
and S’F’
S’F”
F’F”,
we
can
choose
pi
30°
to
do
so.
Tra
nsmi
ssio
n Qua
lity
In
Subsection
3.1.
when
a
different
s
is
chosen,
different
focal
six-bar
linkages
are obtained,
with
different
transmission
indices, and
SF
as
driving
link. The
transmission
index wa s
introduced by
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
12/21
1
o
5
5
I
ol
j
—8
—6
—4 —
4
6
deg
ree
Figu
re 6:
The
e
rror
cu rv
e
f
or the
glo
bal op
timu
m
of
the
seco
nd
ex
amp
le
Figure
7: Four bar
lin kage
and
its focal
six bar equivalent
Suth
erlan
d and
Ro
th [2 ] as
a ge
nera
lizat
ion
of t
he co
nce
pt o
f
t
rans
miss
ion ngl
e
In t
he
case of
plan
ar
f
our b
ar
lin
kage
s
the tr
ansm
issi
on index
re
duc
es
to
the si
ne
o
f
th
e
tra
nsm
issio
n an
gle . Ju
st
lik
e t
he tran
smi
ssion
angl
e whic
h
va
ries
with
th
e
con
figu
ratio
n
o
f
th
e
linka
ge
t
he
tra
nsm
issio
n
inde
x
i
s also co
nfigu
rati
on d
epen
dent
.
A glob
al p
erfo
rman
ce in
dex
m
easu
ring
the
go
odne
ss of
th
e f
orce
and
mo
tion
tr
ansm
issi
on
of the
lin
kage
is
the
tran
smis
sion quali
ty
[22
]
wh ic
h is def
ined in te
rms
o
f
Sut
herl
and and R
oths
tran
smis
sion
in
dex.
In
Fig.
10. we
di
sting
uish t
wo
fo
ur ba
r
lin
kag
es with a
com
mon i
nput li
nk .
SF.
of
u
t ut lin k
s
AP
and DQ.
In
that
figu re
link
SF
is
shown in
its
two
extreme positions
sweeping
the
whole
range
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
13/21
D
a
b
Figure
8: a
Steering
linkage
and
b its
focal
equivalent
Y
b
Figure
9:
The general
six bar focal linkage
A
1
P
S
X
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
14/21
of
m
otio
n.
S
an
d
SF
-.
L
inks
.4P
nd DQ
re disp
laye
d
ni
thei
r c
orre
spon
ding
e
xtrem
e
posi
tions
.
AP
and
l for
th
e
form
er.
ari
d
for
the latte
r.
Th
e
i
nput angl
e
i
s
in
dica
ted
l
ikew
ise,
f
or its
tw
o extr
eme
valu
es.
and
’
T
he tran
smi
ssion
ang
le
’
of th
e
l
eft fo
ur—
bar
link
age of
Fi
g. 1
is
know
n t
o b
e FP .
1.
while
its right
counterpart.
Pr
p
is
_FQD.
Let
Qi
and
stand
for
the t
ransm
iss
ion
qual
ity
of
the
left
and rig
ht
link
ages
, res
pecti
vely
,
i.e.,
i
’
s
in
t
=
sin
Th
e plo
t
of the
tra
nsm
issio
n
qu
alit
y
of
any
of the
tw
o
li
nkag
es
is
show
n in
Fig.
11 vs
. p
aram
ete
r
s.
d
efin
ed
in
Fig. ‘7
It
is appa
rent
fr
om
tins
plot that a
m
axim
um
v
alue o
f th
e t
rans
miss
ion qua
lity.
o
f
= Q
r
=
0.8
3
occ
urs
at
= 0.5
, a
re
sult
t
hat sh
ould be
e
xpec
ted b
y
s
ymm
etry
. H
enc
e,
in
o
rder
to
ach
ieve
a ma
ximu
m
tran
smis
sion
qua
lity,
link
S
F
sho
uld
h
e anc
hore
d
o
nto
th
e
veh
icle
ch
assi
s
half
way be
twe
en
t
he
anch
or po
ints
of th
e t
wo
o
utpu
t
l
inks AP
and
D
Q.
Bec
ause of
con
ditio
n 2
3 ,
the
g
ener
al f
ocal
six-
bar
lin
kag
e a
nd its
original
counterpart
have
both
the
sam
e tr
ansm
issi
on
quali
ty.
4
Th
e
Sy
nt
he
si
s
of
Sp
he
ric
a
l
F
ou
r
a
r
L
in
k
ag
e C
o
up
lin
g
t
he
S
te
eri
ng
W
he
el
w
i
th
t
he
S
te
eri
ng
M
ec
h
an
ism
Stee
ring
link
age
s
a
re
driv
en
by
t
he r
ot ti
on
of the
ste
eri n
g
wh
eel u
sing a
mec
hani
cal tr
ansm
issi
on
t
hat
i
s
base
d,
in mo
st
case
s,
on a
w
orm g
ear
[18
] Th
is
t
rans
miss
ion is s
uitab
le
to
the
cur
rent
desi
gn
of
st
eerin
g
lin
kag
es,
but
wo
uld
no
t b
e
s
uita
ble to
ou
r p
rop
osed
d
esig
n.
S
ince
t
he
d
rivin
g
link
of
our
desi
gn.
he
ncef
orth
r
efer
red
t
o
as
the
dri
ving
li
nk fo
r
bre
vity,
is
cou
pled to
the
vehi
cle
ch
assis
via a
rev
olut
e joi
nt,
the
mo
st
suit
able
tran
smis
sion
in this
c
ase
on
e t
hat
trans
mits
for
ce an
d
m
otio
n fro
m
th
e
st
eerin
g
whe
el,
wh
ose axis
is
inclined
with
respect to
the vertical
by
an angle
directly,
to
the
30
p
p
S
A O
X
\
/
F
F
Fig
ure 1
:
The
lim
it
posi
tions
of
lin
k
AP o
f the
foca
l
si
x-ba
r
link
age
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
15/21
055
0
01 02
03
4
05
06
7 08 09
Figure
11: Transmission
quality of
the steering
linkage
as a
function of
parameter
s of Fig. 7
driving
link of
the steering
linkage
whose
axis can be
assumed
to
be
vertical.
Furthermore
the axis
of the steering
wheel
is
offset
from
the
vehicle
midplane.
while
the axis
of the driving
link
is
located
in
this plane.
The
offset
can
be compensated
for
by means
of
a double
universal joint and
hence,
we
can
safely
assume
that
the
input motion to
the
steering
linkage is provided
via a
shaft
of
axis
intersecting
that
of
the
driving
link at the
above mentioned
angle The obvious
transmission
then
is
apparently
a spherical
four bar
linkage The
balance
of
this
section
is devoted
to the
synthesis of
this linkage
4
Des
cript
ion of
the
Veh
icle
ot t
ion
The
spherical
linkage
of
interest will
be synthesized
as a
function generator
[19],
which requires a
set
of
input output
pairs
of
values
that
the
linkage
is
to
meet.
In
order
to
define
the
input output pairs.
it
will
prove
convenient
to derive
a relation
between the
curvature
of
the vehicle
trajectory and
the
steering
angle
The
radius R
of the circular
trajectory
traced
by
the
vehicle
upon turning
is
often used
to
indicate
the
extent
of
the
vehicle
rotation. From
Fig.
2, R
can be
found
to
be
R
a
31
t
with
being
positive
when the
vehicle
turns to
the
right
and negative
otherwise.
the
same
holding
for
R.
When
o
tends
to
0, R
tends
to
infinity
and
hence
R
o
becomes discontinuous.
Fo r
this
reason
we prefer to
use
the
curvature
i
of
the
above
trajectory
which is
the
reciprocal of R,
i.e.,
2a btan
t nth
32
a
function
of
1i
that
remains
continuous
in
the
interval [h
where
K
K
K
K Q
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
16/21
with
t
and
o
defined
as
the two
extreme
values of
o:
in our
case.
=
—40
and
O
=
hown in
Fig.
12 is
a
plot
of
vs. i
which was obtained
using
ecj.
32).
Q,4
..Z.
03 02
0
01
Figure
12: Angle
vs .
curvature
i in
in
4.2 Input-Output
Function of the
Spherical Four-Bar
Linkage
A
spherical four-har
linkage
is
shown
in
Fig.
13,
in
which
TW is
the
fixed
link;
TU the input
link,
whose motion is identical
to
that
of
the
steering
wheel;
and
VW the output link, connected rigidly
to
FS of the steering six-bar
linkage The positions for the
input
and
output links are defined
by
o
+
t9
and
70
+
y,
respectively.
Fo r proper steering, the curvature
must
be
proportional
to the
input
angle i.e.,
k
= k9
33)
where
k
is a
scaling
factor. Therefore,
when k
and
k
are given, the
input displacement
t9
can be
obtained from
eq. 33 .
The
output displacement
‘y
in
turn,
is
obtained
by
imposing an input-output
relation. We
would like to
provide
a uniform
transmission
ratio
throughout
the
given
motion
range.
Additionally, a
torque amplification is required,
which
we
obtain
by
requiring
that the
transmission
ratio
be of
2:1,
but other transmission ratios
can
be
accommodated,
as
needed.
Fo r
a
value
of
k =
0.4313,
the plot
of
vs.
9
is shown in
Fig.
14.
We
discuss below the
synthesis
of
the spherical
linkage
using
an
optimization
approach.
4.3 Linkage
Optimization
The
input-output
function of
a
spherical
four-bar
linkage
is known
to he
[23]
F 9.
‘y
k
+
k cos 9o
+
?
+
k cos i9
+
i9)
cos 7
+
7)
—k
cos 7
+
7)
+
sin 7
+7
sin o
+
= 0
34)
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
17/21
F
igur
e
13:
The sph
eric
al f
our-
bar
lin
kag
e
w
here
c
os a cos
co
s
OS a
s
in
i
ll 4
S
ill
a
c
os
a
ill
a
k
c
os
a
sin c
os
a
sin
a
In sy
nthe
sizin
g
the
sp
heric
al
lin
kage
we
ass
ume
that
t
he
s
teeri
ng six
-bar
link
age
li
es in
a
h
oriz
onta
l
pla
ne
a
nd
t
hat the
axis
of
the
ste
erin
g-wh
eel ax le m
akes
45°
wi
th
t
he
verti
cal. H
enc
e
a
4
5°,
the
opti
miza
tion
proc
edur
e
thu
s
con
sistin
g
of d
eter
mini
ng
a
an
d
a
that p
rodu
ce
a
link
age
m
eetin
g
a
set o
f in
put-
outp
ut
p
airs with
a
min
imu
m
e
rror
.
W
e
a
im
at
the m
inim
izati
on
of
the Eu
clide
an
no
rm
of th
e des
ign error
ov
er
a
ric
h
se
t
of
in
put-o
utpu
t
pan
s,
n
amel
y
n
Z
E
3s
wh
ere
F t9
36
a
nd
{ i9
}
is
a
set
of n
po
ints
al
ong th
e
in
put-
outp
ut
f
unct
ion
F
’z9
‘
o
f
e
q. 34
and
disp
laye
d
in
F
ig. 1
4. Wh
en
r
an
d
are
kno
wn ,
the
fo
rego
ing
m
inim
izati
on redu
ces to so
lvin
g
a
li
near le
ast-
squ
are pro
blem
. Fo
r
ex
amp
le, wi
th r9 50°
an
d
7
o
—
80°
,
we
sp
ecif
y
40
pai
rs
of
equ
ally-
spac
ed
in
put-
outp
ut
v
alue
s
{ i
9.
‘
}
T
he re
sult
s
of
the o
ptin
uzat
ion are s
how
n in
T
able
2.
In
th
e
o
ptim
izati
on pro
ced
ure
we
impo
se the
con
ditio
n
t
hat
the
inpu
t link
b
e
a
cr
ank.
Thi
s ca
n
he r
eadi
ly
done
upo
n
re
calli
ng
th
e m
obil
ity crite
ria de
rived
by
Z
heng and
ng
eles
[ 3
:
k
+
k
k
k
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
18/21
4
2—
0.1—
—
6
—04 — 02
0 2
4
6
t9
rad
Figure
14:
The
input-output
function
of
the spherical
four-bar linkage
Table 2:
Optimum linkage with
io
= 500
and
=
—80°
k k k
ü
U
U
U
0.1334 2.019 6
0.7071
4.4809
45°
8.9675°
49.2807°
19.2961°
Now.
we regard
LI
and
o
as
additional
design variables to
minimize
the
sum
of the squares
of the
structural
error at
the
given input
values
The
optimum results
are
LI
= —1.4825°
o
=
—92.554°
the
other
parameters
being
shown in Table
3. The
output
link of
the
second
linkage
turns
out
to
be
a
crank as
well
with
a
transmission
quality
of
0.7689
which is still acceptable,
while the
error plot
is
shown
in
Fig.
16.
Note that the
second
linkage
offers
an error
which is
one
order
ofmagnitude
smaller
Table
3: Spherical
linkage
with
optimum
values of
and
‘y
k
k
Ic Ic
U
U
U
U
L 0.0991
0.0037
0.7071
2.2652 45° 17.3366° 88.1041°
89.6981°
than that of
the first
o ne . H ow ev er this
is done at
the expense
of
a
lower
transmission
quality.
In
practice.
such
a
small
error is futile,
for the tight tolerances
required to
implement
it increases
the
production
costs.
However the
transmission
quality
impacts 011
the life span
of
the
mechanism.
and
hence.
becomes a
more relevant
performance
index
In
summary.
the first
linkage is
preferred
over
the
second
one.
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
19/21
0015
001
0005
-0005k
-001
0015
2
—0 8
— 6
—0 4
—
2 0 0.2 0 4 0 6
0.8
t9
rad
Figure
15: Error
plot of the linkage of Table
5
Conclusions
A computational-kinematics
approach wa s
introduced to synthesize
a
steering four-bar linkage The
objective
of
this approach is to
minimize the root-mean square
value of the design error in the
steering condition.
‘W e
acknowledge
that
the minimization
of
the
design
error
is
not equivalent to
that
of the structural
error. Nevertheless,
we invoke a recent result
indicating that the two errors
become
closer
to each
other
as
the cardinalitv of the data set of prescribed
input-output pairs
in
the
synthesis of function
generators increases.
By
means
of an elimination procedure. a polynomial
equation
in
on e unknown
is
derived
from the associated
normality condition,
from w hi ch a ll local
optima
are computed
and, hence,
the
global
optimum can
he
readily
found.
Moreover
we synthesize
a
kinematically-equivalent
six-bar
focal mechanism,
to replace the steering
four-bar linkage, which
turns
out to
show
an
unacceptable
dimensional
unbalance. The
six-bar
equivalent
linkage shows
much
better-balanced
dimensions. Finally,
we
propose
an optimum
spherical
four-bar
linkage to
couple
the steering-wheel
axle
with
the steering mechanism.
In
fact,
two candidate mechanisms are
obtained,
with slightly different
performances. Based
on practical considerations,
the
mechanism
with the
higher
transmission quality,
if
with
a
lower accuracy,
is preferred.
Acknowledgements
The research
work
reported
here
wa s made
possible under Research Grant OGP0004 532
of the
Natural
Sciences
and
Engineering
Research Council NSERC
of Canada. Mr
Ya o would
like
to
thank
the China Scholarship
Program
for
providing
him
support
during
his
one-year visit
to the
Centre
for Intelligent Machines,
McGill
University
Montreal.
Canada.
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
20/21
x
10
2
T
0-
—05--
—04 02
02
0.4 0.6
0 8
rad
Figure
16: Error
plot
d cs
‘ygen
efe
ren
es
Dijksman,
E. A. ,
1997,
“Do the Front
Wheels
of
Your Car Really
Meet Ackermann’s
Principle
When Driving Through
a
Bend of
the Road”, Personal Communication.
2.
Fahey, S.
O’F.
and
Huston,
D.
R. ,
1997,
“A
Novel Automotive
Steering
Linkage”,
Journal
of
Mechanical
Design, Vol . 119 ,
pp.
481
481.
3.
Cole, D.
J.,
1997, “Analysis
of
the
Dynamic Force
in
the
Steering
Linkage of
Off-Road
Vehicles”,
mt
J.
of
Vehicle
Design Vol. 18,
No . 1,
pp .
83
99.
4.
Zanganeh,
K. E.. Angeles ,
and
Kecskemthv
A. .
1995.
“On
the
Optimum
Design
of
a
Steer
ing
Mechanism.”
Proc. Seventh
World
Congress
on
the Theory of Machines
and
Mechanisms,
Milan,
pp .
2524 2528.
5
Reister, D. B. and
Unseren,
M.
A.. 1993.
“Position and Constraint
Force
Control
of
a Vehicle
with
Two
or
More Steering
Driving
Wheels ” IEEE
Trans. on
Robotics
and
Automation, Vol. 9,
No.
6,
pp .
723
731.
6.
Dudiä,
F.
L.,
Diacoiiescu, D.
and
Gogu Gr..
1989, Mezanisme
Articulate.
Inventica
Jinemat
ica,
Editura
Technicà, Bucharest.
7.
Ardayflo,
D.
D.
and Qiao
D., 1987, “Analytical
Design
o f Seven Joint
Steering
Mechanisms”.
Mech.
a-nd Mach.
Theory. Vol.
22.
No.
4,
pp .
315
319.
8.
Miller. G.
II..
1986.
“The Effect
of Ackerman
sic Steering
Correction
Upon
Front Tire
Wear
of
Medium
Duty
Trucks,” SAE
Paper
No. 861975.
-
8/19/2019 The Kinema Tic Synthesis of Steering Mechanisms
21/21
9
D
udià
,
F
.
L
an
d
A
lexa
ndru
,
P
.
1972 “Sy
stem
atis
ierun
g
der Le
nkm
echa
nisrn
en
der Ba
d
f hr
zeug
e’
K
oris
trukt
ion. Vol
24
p
p.
54
61
10 Dudiã.
F.
L
and Alexandru.
P
975
“Synthesis of
the
Seven-Joint
p ce
Mechanism
Used
in the
Stee
ring
S
stem
o
f
R
oad
Veh i
cles
”.
Pro
c.
F
ourt
h W
orld
Gongrcs 5
on th€ T
heo
ry
of
Ma
chin
es
and M
ech
ani
5ms
.
New
castl
e
U
pon
Tvn
e
197 5
p
p.
6
97
702
11 Dv
ali
H R
an
d
A
leks
ishv
ili.
N
1971
“D
esig
n
for
an Aut
omo
bile
S
teer
ing
G
ear
is a S
phe
rical
Fo
ur-B
ar Li
nkag
e”, Mec
h.
and
M
ach.
T
heo
ry No
6
p
p.
167
175
12 Go
ugh. V
F.. 19 56
“Pr
actic
al
T
ire R
esea
rch.
”
SAE
T
ran
sacti
ons.
Vol
64
pp 310—318
13 C
om
be.
W.
.
1818 “O
bse
rvat
ions
on
Ack
erm
ann’
s
Pat
ent Mo
vabl
e
Ax
les
fo
r Four—Wheeled
C
arria
ges,
”
P
rinte
d for
R
.Ac
kerm
ann
. 101 St
rand
, by
J. D
igge
ns.
St .
Ann
’s L
ane. Lond
on.
14
Wolf
W. A.
1959
“Anal
ytica
l
Design
of
an Ack
erm
ann
S
teeri
ng Lin
kag
e”, A
SM
E J
ourn
al
o
f
En
gine
erin
g
for
I
ndu
stry,
pp.
10 14
15 Hay
es M
J.
D. Par
sa,
<
an
d A
nge
les
J.
,
1999
“T
he
ef
fec t
of d
ata-s
et
card
inal
ity o
n the
des
ign and
struc
tura
l
er
rors of fou
r-ba
r
func
tion-
gene
rato
rs”,
P
roc. T
enth
Wor
ld Con
gr
es s
on
the
T
heo
ry
of
Ma
c/tin
es a
nd
Me
chan
isms
.
J
une 20—24
Ou
lu, Finla
nd, Vol
1
pp .
43
7
442
16 Dij
ksm
an, E A.
1976 “How
to
Re
plac
e
the
F
our-
Bar Cou
pler
M
otio
n
by
th
e
Cou
pler
Mo
tion of
a
Si
x-ba
r
M
ech
anis
m
W
hich Do
es Not
C
ont
ain
a
Par
allel
ogra
m”, R
evue Rou
main
e
de
s Sc
ienc
es
T
ech
iques
Sér
ie
de
Méc
aniq
ue
A
ppli
quée
,
Vol
21
pp.
359
370
17
Wunderlich, W.
1968 “On
Burmester’s
Focal
Mechanism and Hart’s
Straight-Line
Motion,”
Jou
rnal of
M
ech
anism
s. Vol
3
pp
.
79—86
18
Dür
r,
R.
an
d S
chie
hlen
. W
., 1998
“M
odel
s
fo
r Sim
ulat
ion o
f
Pow
er-S
teeri
ng
S
ystem
s,”
in
A
ng e
les
J. and
Za
khar
iev,
E
eds.
, NA
TO
A
SI Se
rie s
F
Vol
161
S
prin
ger-
Verl
ag,
He
idel
berg
,
p
p.
268—295
19
De
navi
t,
J.
and
Har
tenb
erg,
R
S 1964
K
inem
atic Synt
hesi
s
of Lin
kag
es,
Mc
Gra
w-H
ill
Bo
ok
Co
. N ew Yo
rk .
20 IKah
aner
D
Mo
ler
C
and
Nas
h,
5
1989 N
ume
rical
Me
thod
s
an
d
S
oftw
are
Pren
tice-
Hall
,
Inc., Englewood
Cliffs N ew
Jersey .
21 S
uthe
rlan
d,
G
a
nd Both
, B
.
1973
“A
Tran
smis
sion Inde
x
for
S
pati
al Mec
hani
sms”
, ASM
E
Jour
nal
of
E
ngin
eerin
g
for Indu
stry
, Vol
95
pp.
598—597
22
Go ss
elin
C
a
nd A
ng e
les
J.,
1986
“O
ptim
izat
ion
o
f
Plan
ar
and S
pher
ical
F
unct
ion
Ge
nera
tors
as
Min
imum
-D
efect
L
inka
ges .
” Mech
a
nd M
ach.
The
ory.
Vol 24
No 4
pp.
293—307
23
Zh en
g.
L and An
geles
.
J
..
1992 “L
east
-Squ
are
Op
timi
zatio
n
of
Pla
nar an
d Sp
heri
cal Fou
r
b
ar
Fu
nctio
n
Ge
nera
tors Und
er Mob
ility Con
stra
ints”
,
Jou
rnal
o
f
M
ech
anic
al
Des
ign
Vol
114
p
p.
569
573