
Tesis de Grado. Octubre27(Correciones de Prof. Ernesto)Con Nuevas Correccioes - Copia
144
UNIVERSIDAD DE LOS ANDES FACULTAD DE INGENIERÍA ESCUELA DE INGENIERÍA ELÉCTRICA HERRAMIENTA COMPUTACIONAL PARA EL CÁLCULO DE FALLOS ASIMÉTRICOS BASADA EN LA INVERSA DE LA MATRIZ DE ADMITANCIA EN FORMA FACTORIZADA. Br: Andrea de los Angeles Albornoz Peña
-
Upload
ernesto-mora -
Category
Documents
-
view
26 -
download
0
Transcript of Tesis de Grado. Octubre27(Correciones de Prof. Ernesto)Con Nuevas Correccioes - Copia

UNIVERSIDAD DE LOS ANDESFACULTAD DE INGENIERÍA
ESCUELA DE INGENIERÍA ELÉCTRICA
HERRAMIENTA COMPUTACIONAL PARA EL CÁLCULO DE
FALLOS ASIMÉTRICOS BASADA EN LA INVERSA DE LA MATRIZ
DE ADMITANCIA EN FORMA FACTORIZADA.
Br: Andrea de los Angeles Albornoz Peña
Mérida, Octubre, 2012.

UNIVERSIDAD DE LOS ANDESFACULTAD DE INGENIERÍA
ESCUELA DE INGENIERÍA ELÉCTRICA
HERRAMIENTA COMPUTACIONAL PARA EL CÁLCULO DE FALLOS ASIMÉTRICOS BASADA EN LA INVERSA DE LA MATRIZ
DE ADMITANCIA EN FORMA FACTORIZADA.
Trabajo de Grado presentado como requisito parcial para optar el título de Ingeniero Electricista.
Br: Andrea de los Angeles Albornoz PeñaTutor: Prof. Ernesto J. Mora N.
Mérida, Octubre, 2012.

ii
UNIVERSIDAD DE LOS ANDESFACULTAD DE INGENIERÍA
ESCUELA DE INGENIERÍA ELÉCTRICA
HERRAMIENTA COMPUTACIONAL PARA EL CÁLCULO DE FALLOS ASIMÉTRICOS BASADA EN LA INVERSA DE LA MATRIZ
DE ADMITANCIA EN FORMA FACTORIZADA.
Br: Andrea de los Angeles Albornoz Peña
Trabajo de Grado, presentado en cumplimiento parcial de los requisitos exigidos para optar al
título de Ingeniero Electricista, aprobado en nombre de la Universidad de los Andes por el
siguiente Jurado.
________________________
Prof. Jesús A. VelazcoC.I. 8.088.307
________________________
Prof. Marisol DávilaC.I. 10.107.821
________________________
Prof. Ernesto J. Mora N.C.I. 3.499.666
iii
AGRADECIMIENTOS
A Dios y la Virgen, por darme la vida y salud para seguir siempre adelante.
A mi Madre y mi Padre, quienes han estado siempre a mi lado y han dado todo por mí.
A mis hermanos, quienes han estado en todo momento apoyándome y con quienes he
compartido tantas experiencias.
A Daniel, por acompañarme constantemente y apoyarme.
A mi tutor, profesor Ernesto Mora, por el gran apoyo brindado para la realización de este
Trabajo.
A mis amigos, con quienes compartí tantos momentos y experiencias.
A todas aquellas personas que de una u otra manera estuvieron involucradas en el logro de mi
meta, Mil Gracias.
iv
Br. Albornoz P. Andrea A. Herramienta Computacional para el Cálculo de Fallos Asimétricos basada en la Inversa de la Matriz de Admitancia en forma Factorizada. Universidad de Los Andes. Tutor: Prof. Ernesto Mora. Octubre 2012.
Resumen
Los fallos en los sistemas de potencia debidos a cortocircuitos generan corrientes de gran magnitud, las cuales tienen efectos dinámicos y térmicos. En el estudio y análisis de estos fallos se utiliza el método de las componentes simétricas. El cálculo de las corrientes de cortocircuito requiere formular las ecuaciones nodales, en coordenadas de secuencia, del sistema de potencia, donde la matriz de admitancias es cuadrada, simétrica y altamente rala, es decir, una matriz con un alto contenido de elementos nulos. La solución requiere obtener la matriz de impedancia de barra, la cual, también, es cuadrada y simétrica, pero completamente llena. Aprovechando la característica rala (sparse) de la matriz de admitancia se han desarrollado las técnicas de matrices ralas (Sparsity), mediante las cuales se obtiene la matriz de impedancia de barra como la inversa de la matriz de admitancia en forma factorizada. Aplicando la técnica de bifactorización (RL) y utilizando solamente los elementos no nulos de la matriz de admitancia, se pueden resolver sistemas muy grandes de una manera práctica y eficiente, logrando reducir el tiempo de ejecución y los requerimientos de memoria. En la aplicación de las técnicas de matrices ralas (Sparsity) se identifican cuatro fases: almacenamiento compacto de la matriz, determinación del orden óptimo de eliminación, factorización de la matriz y por último, la fase de solución de las ecuaciones, por medio del método de sustitución hacia atrás de Gauss. En este trabajo se desarrolla un programa de cálculo de cortocircuito, utilizando el lenguaje de programación FORTRAN en base a las técnicas de matrices ralas (Sparsity) y el método de las componentes simétricas. El programa calcula los voltajes y corrientes en un sistema de potencia debido a fallos simétricos y asimétricos, y también la corriente correspondiente al primer ciclo y de interrupción según la Norma ANSI IEEE C.37.010.
Descriptores: Fortran, matrices ralas (Sparsity), cortocircuito, matrices ralas.

v
ÍNDICE GENERAL
APROBACIÓN……………………..…………………...…………………………..………... iiAGRADECIMIENTOS..............................................................................................................iiiRESUMEN.................................................................................................................................ivINTRODUCCIÓN.......................................................................................................................1
Capítulo pp.
1. JUSTIFICACIÓN, PLANTEAMIENTO DEL PROBLEMA Y OBJETIVOS...............3
1.1 Justificación...........................................................................................................................31.2 Planteamiento del problema..................................................................................................31.3 Objetivos………....................................................................................................................4
1.3.1 Objetivo general......................................................................................................41.3.2 Objetivos específicos..............................................................................................4
2. MARCO TEÓRICO..............................................................................................................5
2.1 Fallos………..........................................................................................................................52.1.1 Corriente de cortocircuito en un sistema de potencia.............................................6
2.2 Componentes simétricas........................................................................................................82.2.1 Componentes simétricas en términos del operador a y la componente simétrica de
la fase A.................................................................................................................92.3 Desfasaje para cada una de las secuencias en los sistemas de transformación trifásicos....102.4 Análisis de fallos en coordenadas de secuencia...................................................................11
2.4.1 Método general para determinar la forma de conexión de las redes de secuencia……......................................................................................................12
2.5 Método general de cálculo de la corriente de cortocircuito.................................................212.5.1 Método general de solución basado en el teorema de thévenin............................212.5.2 Aplicación método de la matriz de impedancia de barra al cálculo de los cambios
en las tensiones de barras debidas a cortocircuitos..............................................222.6 Técnica de matrices ralas (Sparsity)....................................................................................27
2.6.1 Métodos de factorización......................................................................................322.6.2 Aplicación de las técnicas de matrices ralas (Sparsity) para el cálculo de la
corriente de cortocircuito.....................................................................................372.7 Cálculo de los factores matriciales en forma desacoplada..................................................39
2.7.1 Solución en forma desacoplada............................................................................402.8 Cálculo de la corriente de cortocircuito de acuerdo a la Norma ANSI/IEEE C.37.010......42
2.8.1 Cálculo de la corriente simétrica ajustada por los decrementos AC y DC...........42

vi
2.8.2 Fallos alimentados desde fuentes remotas............................................................452.8.3 Fallos alimentados desde fuentes locales..............................................................462.8.4 Factores de multiplicación ponderados.................................................................49
3. IMPLEMENTACIÓN DE LA HERRAMIENTA COMPUTACIONAL......................52
3.1 Generalidades......................................................................................................................523.2 Opciones de entrada.............................................................................................................52
3.2.1 Crear un archivo....................................................................................................533.2.2 Corregir un archivo...............................................................................................543.2.3 Estudio de cortocircuito del sistema.....................................................................54
4. CASOS DE ESTUDIO........................................................................................................67
4.1 Ejemplo 1……….................................................................................................................674.2 Ejemplo 2…….....................................................................................................................724.3 Ejemplo 3….........................................................................................................................774.4 Discusión…….....................................................................................................................83
CONCLUSIONES.....................................................................................................................85RECOMENDACIONES............................................................................................................86REFERENCIAS BIBLIOGRÁFICAS......................................................................................87

vii
ÍNDICE DE FIGURAS
Figura pp.2.1Corriente total asimétrica........................................................................................................62.2 Oscilograma de la corriente simétrica de armadura de la máquina sincrónica....................82.3Fasores desbalanceados en términos de sus componentes simétricas....................................92.4Sistema de transformación Y-∆ y ∆-Y...................................................................................102.5Desplazamiento de fase en el sistema de transformación Y-∆ y ∆-Y, según Nomenclatura
alternativa.........................................................................................................................112.6Diagrama de un Fallo de línea a tierra en F..........................................................................142.7Conexión de las redes de secuencia para un fallo Línea-Tierra...........................................152.8Diagrama de un Fallo de línea a línea..................................................................................162.9Conexión de las redes de secuencia para fallo Línea-Línea.................................................172.10Diagrama de un Fallo de línea a línea a tierra....................................................................182.11Conexión de redes de secuencia para fallo Línea-Línea-Tierra.........................................192.12Diagrama de un Fallo Trifásico..........................................................................................202.13Conexión de redes de secuencia para un Fallo Trifásico....................................................202.14 Diagramas de flujo típicos para análisis de problemas de redes: (A) solución simple, (B)
solución múltiple con diferentes vectores B, (C) solución múltiple con diferentes matrices de coeficientes con la misma estructura rala.....................................................32
2.15 Factores de Multiplicación para aplicación de fallos trifásicos y de línea a tierra.Incluyen el decremento de la componente DC................................................................................46
2.16 Factores de multiplicación para aplicación de fallos trifásicos. Incluyen el decremento de la componente AC y DC..................................................................................................47
2.17 Factores de multiplicación para aplicación de fallos de línea a tierra. Incluyen el decremento de la componente AC y DC..........................................................................47
2.18 (IAsym/ISym)nacd vs. X/R para diferentes tiempos de separación de contactos......................482.19a) Decremento AC para fallos remotos respecto a la fuente de corto circuito; b) Factores
de ajuste para decremento AC en función de X/R y el punto de localización del fallo, para diferentes tiempos de apertura de contactos y tipos de fallo; c) Factores de ajuste por decremento AC..........................................................................................................49
2.20 Factores de multiplicación para X/E, fallos trifásicos, diferentes NACDR y tiempos de interrupción......................................................................................................................50
2.21 Factores de multiplicación para X/E, fallos monofásicos, diferentes NACDR y tiempos de interrupción......................................................................................................................51
3.1Diagrama general del desarrollo del programa. 51
3.2Diagrama de subrutinas........................................................................................................534.1. Diagrama de sistema de potencia (NEPLAN)..................................................................674.2. Diagrama de sistema de potencia (NEPLAN)..................................................................70
viii
4.3. Diagrama de sistema de potencia (NEPLAN)..................................................................75
ÍNDICE DE TABLAS
Tabla pp.2.1 Factores de multiplicación recomendados por las normas ANSI/IEEE para la corrección
de las impedancias de las fuentes de cortocircuito...........................................................40
4.1 Datos generadores (ejemplo 1).........................................................................................654.2 Datos cargas estáticas (ejemplo 1)....................................................................................654.3 Datos líneas de transmisión (ejemplo 1)...........................................................................664.4 Comparación de resultados obtenidos a partir del programa diseñado Cortocircuito,
Neplan, y referencia bibliográfica, sin aplicar norma, para fallo Trifásico, Línea-Tierra, Línea-Línea y Línea-Línea- Tierra. Fallo en barra 1. (Ejemplo 1)..................................66
4.5 Comparación de resultados obtenidos a partir del programa diseñado Cortocircuito y Neplan, según Norma ANSI IEEE 37.010. Para fallo Trifásico y Línea-Tierra. Fallo en barra 1. (Ejemplo 1).........................................................................................................67
4.6 Datos generadores (ejemplo 2).........................................................................................694.7 Datos cargas estáticas (ejemplo 2)....................................................................................694.8 Datos transformadores de dos devanados (ejemplo 2).....................................................694.9 Datos líneas de transmisión (ejemplo 2)...........................................................................704.10 Comparación de resultados obtenidos a partir del programa diseñado Cortocircuito,
Neplan, y referencia bibliográfica, sin aplicar norma, para fallo Trifásico, Línea-Tierra, Línea-Línea y Línea-Línea- Tierra. Fallo en barra 1. (Ejemplo 2)..................................70
4.11 Comparación de resultados obtenidos a partir del programa diseñado Cortocircuito yNeplan, según Norma ANSI IEEE 37.010. Para fallo Trifásico y Línea-Tierra. Fallo en barra 1. (Ejemplo 2).........................................................................................................71
4.12 Datos generadores (ejemplo 3).........................................................................................734.13 Datos cargas estáticas (ejemplo 3)....................................................................................734.14 Datos líneas de transmisión (ejemplo 3)...........................................................................744.15 Comparación de resultados obtenidos a partir del programa diseñado Cortocircuito,
Neplan, y referencia bibliográfica, sin aplicar norma, para fallo Trifásico, Línea-Tierra, Línea-Línea y Línea-Línea- Tierra. Fallo en barra Manapouri. (Ejemplo 3)...................75
4.16 Comparación de resultados obtenidos a partir del programa diseñado Cortocircuito y Neplan, según Norma ANSI IEEE 37.010. Para fallo Trifásico y Línea-Tierra. Fallo en barra Manapouri. (Ejemplo 3)..........................................................................................76

INTRODUCCIÓN
En los sistemas de potencia se presentan contingencias debidas a cortocircuitos, que causan
corrientes de gran magnitud, las cuales presentan efectos dinámicos y térmicos muy
importantes, que pueden producir, entre otros, deterioro de los aislantes, fusión de los
conductores, daños mecánicos a los equipos, perturbaciones en los circuitos de
comunicaciones y, además, podrían someter a los seres humanos a situaciones de alto riesgo.
En consecuencia, estas corrientes deben ser despejadas en el menor tiempo posible.
En virtud de lo anterior, es imperativo el cálculo de los niveles de la corriente de
cortocircuito, para lo cual se han desarrollado diferentes métodos computacionales altamente
sofisticados, basados en las técnicas nodales y de las matrices ralas (sparse), que permiten
reducir el tiempo de ejecución y los requerimientos de memoria, en sistemas de potencia a
gran escala, en donde, el manejo matricial de la solución es de gran importancia.
En un sistema de potencia grande, puede ser determinado, en promedio, que no más de tres
líneas son conectadas a cada barra y en consecuencia encontramos en cada fila de la matriz de
admitancia de barras, menos de cuatro elementos no nulos, lo cual significa que en un sistema
de 1000 barras, esta matriz, de dimensión 1000x1000, contiene menos de 4000 elementos no-
nulos, en lugar de 1000000 elementos, es decir, 996000 son ceros[Brameller, 1976].
Las técnicas de matrices ralas (Sparsity) aplicadas al cálculo de las corrientes de
cortocircuito en sistemas de potencia a gran escala, en términos de la matriz de impedancias de
barra, formulada como la inversa de la matriz de admitancia en forma factorizada, han
permitido el desarrollo de métodos en coordenadas de secuencia altamente eficientes, en
donde solamente es necesario calcular el vector de la matriz de impedancias de barras
correspondiente a la barra donde ocurre el fallo.
Estas técnicas se basan en el método de eliminación de Gauss, en donde la matriz inversa es
presentada en forma de productos matriciales obtenidos a partir de la aplicación de las técnicas
de descomposición triangular LU/LDU o la de bifactorización (RL).

2
El objeto de este trabajo es el desarrollo de un programa, en lenguaje FORTRAN, basado
en las técnicas de matrices ralas (Sparsity), para el cálculo de las corrientes de cortocircuito
debidas a los fallos simétricos y asimétricos, utilizando el método de las componentes
simétricas; así como, el cálculo de corriente de primer ciclo y de interrupción, según la Norma
ANSI IEEE C.37.010.
El trabajo especial de grado se divide fundamentalmente en cuatro capítulos, presentando a
continuación la descripción de cada uno de ellos:
Capítulo 1
Justificación, planteamiento del problema y objetivos propuestos para el desarrollo e
implementación del programa.
Capítulo 2
Estudio y análisis de la teoría relacionada con los cálculos de corriente de cortocircuito, los
métodos de bifactorización, técnicas de matrices ralas (Sparsity), análisis de fallos
asimétricos, la metodología de desacople de redes y el cálculo de corriente de cortocircuito
siguiendo el estándar ANSI IEEE C.37.010.
Capítulo 3
Descripción general del desarrollo del programa y presentación de las distintas etapas que lo
conforman.
Capítulo 4
Exposición de los casos de estudio implementados en el programa y análisis de los resultados.
CAPÍTULO 1JUSTIFICACIÓN, PLANTEAMIENTO DEL
PROBLEMA Y OBJETIVOS
El presente capítulo expone la justificación, el planteamiento del problema y los objetivos
trazados para el desarrollo e implementación del programa.
1.1 JUSTIFICACIÓN
Hoy en día, la computadora digital es una herramienta indispensable en la planificación,
operación y control de los sistemas eléctricos de potencia. El área de análisis de sistemas de
potencia consiente de esta realidad, tiene como línea de investigación el desarrollo de una
herramienta computacional en forma modular para el modelado, análisis y simulación de
sistemas de potencia que permita conocer las técnicas y procedimientos más avanzadas de la
ingeniería del software y lograr la experiencia necesaria para el desarrollo de programas de
aplicación a la solución de diversos problemas relacionados con los sistemas de potencia. En
este trabajo de grado se propone como objetivo general, el desarrollo del módulo de cálculo de
la corriente simétrica de corto circuito debida a fallos asimétricos en sistemas de potencia, en
el cual se pretende desarrollar un software basado en el algoritmo de la inversa de la matriz de
admitancia en forma factorizada.
1.2 PLANTEAMIENTO DEL PROBLEMA
En los sistemas de potencia es primordial conocer los valores del consumo de las cargas
conectadas, así como los valores aportados por las máquinas de generación. Estos datos

4
contribuyen en general, ya que al momento de presentarse un fallo en cualquier barra o en las
líneas, el sistema sea capaz de interrumpir y despejar la falla lo antes posible. En aras de
realizar este proceso de la manera más eficaz posible, es vital conocer los valores de corriente
antes del fallo y luego del fallo, y es en esta parte donde entra el juego la importancia de la
herramienta computacional para calcular los valores de corriente al momento de producirse un
cortocircuito. Esta herramienta desarrollada está basada en las técnicas de matrices ralas
(Sparsity), las cuales presentan una serie de ventajas al momento de manejar una gran cantidad
de barras en el sistema de potencia, sin utilizar gran cantidad de memoria.
1.3 OBJETIVOS
1.3.1 OBJETIVO GENERAL
Elaborar un programa basado en el algoritmo de la inversa de la matriz de admitancia en
forma factorizada para el cálculo de la corriente simétrica de corto circuito debida a fallos
asimétricos en sistemas de potencia.
1.3.2 OBJETIVOS ESPECÍFICOS
Estudiar el método de eliminación de Gauss y su aplicación a la solución de sistemas
lineales de ecuaciones.
Estudiar los métodos de factorización de matrices. La transformación LU, la
transformación LDU y la transformación LR. La inversa de la matriz de admitancia en
forma factorizada.
Estudiar las técnicas de matrices ralas (Sparsity) y su aplicación a la solución de sistemas
lineales de ecuaciones.
Estudiar las técnicas de análisis de fallos asimétricos: a) Método de la matriz Z de barras
construida en forma algorítmica y b) Método de la inversa de la matriz de admitancia en
forma factorizada.
Estudiar y aplicar las técnicas matrices ralas (Sparsity) al cálculo de la corriente simétrica
de cortocircuito debida a fallos asimétricos en sistemas de potencia.
CAPÍTULO 2MARCO TEÓRICO
En este capítulo se presenta las bases teóricas fundamentales para el desarrollo del programa:
los métodos de cálculo de las corrientes de cortocircuito y su solución matricial en forma
desacoplada, las técnicas de matrices ralas (Sparsity) y la aplicación de la Norma ANSI IEEE
C37.010, para el cálculo de la corriente de medio ciclo y de interrupción, para la selección de
interruptores de potencia y de otros dispositivos de protección.
2.1 FALLOS
Son fenómenos transitorios medianamente rápidos causados por cambios en el
sistema de potencia debidos a cortocircuitos o líneas abiertas. Existen fallos simétricos
y asimétricos. Los primerosson consecuencia de cortocircuitos trifásicos; estos
mantienen su simetría en el sistema, y para su análisis se utiliza el modelo de circuito
monofásico referido a la estrella equivalente. Los fallos asimétricos los cuales son
consecuencia de cortocircuitos monofásicos, bifásicos, bifásicos a tierra y por líneas
abiertas; estos fallos introducen desequilibrios en las corrientes y tensiones del sistema
de potencia, los cuales se analizan por el método de componentes simétricas[Das, 2002; Mora,
2010], sin embargo, como se estudiará más adelante ambas fallos se podrán analizar o
calcular en el marco de las coordenadas de secuencia.

6
Generalmente, los fallos trifásicos manejan los niveles de corrientes más altos, sin
embargo en algunos casos el fallo monofásico puede ser más severo en mediana
tensión (34.5 [kV]) y a nivel de la red primaria de distribución de 13.8 [kV].
7
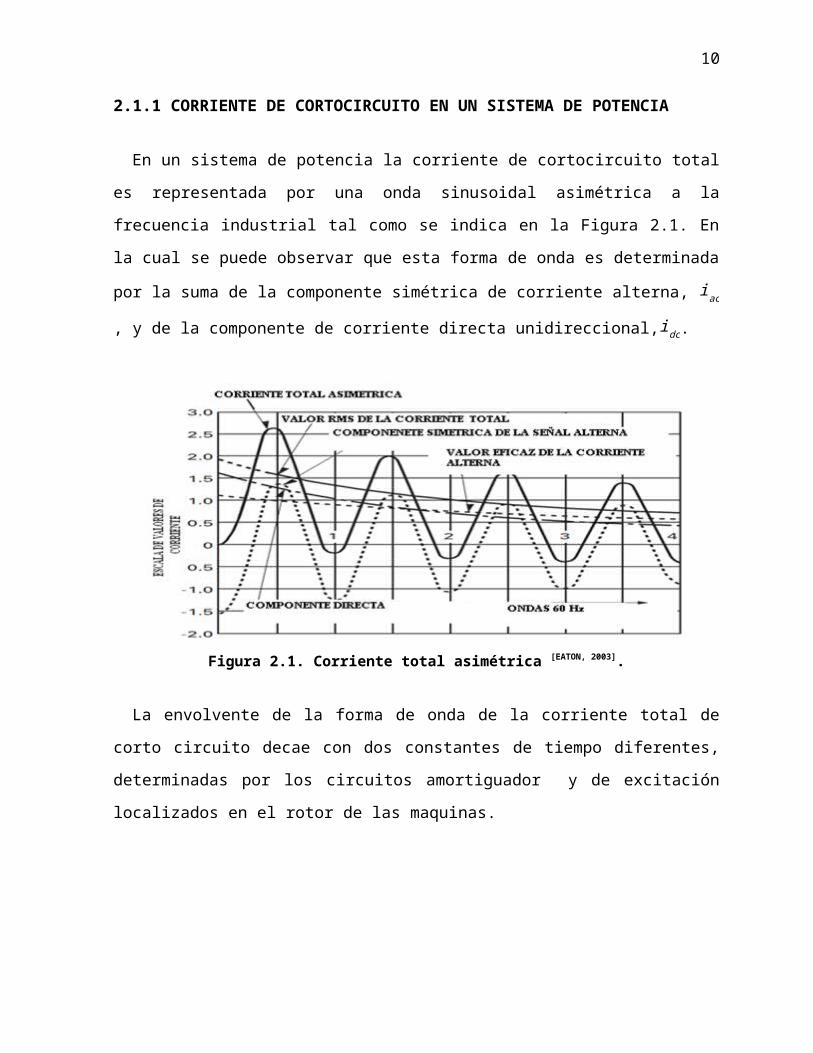
2.1.1 CORRIENTE DE CORTOCIRCUITO EN UN SISTEMA DE POTENCIA
En un sistema de potencia la corriente de cortocircuito total es representada por una onda
sinusoidal asimétrica a la frecuencia industrial tal como se indica en la Figura 2.1. En la cual
se puede observar que esta forma de onda es determinada por la suma de la componente
simétrica de corriente alterna, iac, y de la componente de corriente directa unidireccional,idc.
Figura 2.1. Corriente total asimétrica [EATON, 2003].
La envolvente de la forma de onda de la corriente total de corto circuito decae con dos
constantes de tiempo diferentes, determinadas por los circuitos amortiguador y de excitación
localizados en el rotor de las maquinas.
2.1.1.1 Componente de corriente directa: Esta componente da la característica
asimétrica a la corriente de cortocircuito total. La variación en función del tiempo viene dada
por la siguiente ecuación:
idc=√2∗(I ' '−I L) Sen (α−φ )∗e−tT a (2. 1)
donde:
I ' '= E ' '
X d' '+¿ Xext ¿
=valor inicial rms de la corriente subtransitoria.
I L = corriente de carga previa al fallo.
8
T a=Xd
' '+ Xext
2 πf ¿¿=constante de tiempo de corriente directa.
ra ; rext = la resistencia de armadura del generador y la resistencia externa.
α
φ
= ángulo de voltaje en el momento que se produce el cortocircuito.
= ángulo de corriente en el momento que se produce el cortocircuito.
2.1.1.2 Componente de corriente simétrica: Esta componente de corriente alterna posee
una envolvente que decae hasta permanecer en un valor constante luego de aproximadamente
ocho ciclos de la forma de onda. En la Figura 2.1. se observa el período subtransitorio y el
transitorio, en los cuales la envolvente decae exponencialmente con la constante respectiva. La
variación de esta componente en función del tiempo se rige por la siguiente ecuación:
ica=√2 ( I ' '−I ' ) e−tT
' 'Sen ( wt+α−φ )+√2 ( I '−I ) e
−τT
'Sen (wt+α−φ )+√2 I∗Sen (wt+α−φ )
(2. 2)donde:
I ' '= E ' '
X d' '+¿ Xext ¿
= valor inicial rms de la corriente subtransitoria
I '= E '
Xd' +¿ X ext¿
= valor inicial rms de la corriente transitoria
I ' '= EXd +Xext
= valor rms de la corriente de régimen permanente de corto circuito
α = ángulo de voltaje en el instante en el que se produce el corto circuito
φ= ángulo de corriente en el instante en el que se produce el corto circuito
X’’d,X’
d y Xd= son, respectivamente las reactancias subtransitoria, transitoria ysincrónicas del generador
Xext = reactancia externa
E’’, E’ y E= son, respectivamente los voltajes detrás de las reactancias subtransitoria y transitoria y el voltaje inducido para la condición de carga del generador antes del cortocircuito.
T ´´=Xd
´´+ Xext
Xd´ +Xext
T do´´ = la constante de tiempo subtransitoria
T ´=Xd
´ + Xext
Xd+ Xext
T do´
= la constante de tiempo transitoria, siendo T do´´ y Tdo
´
,
respectivamente, las constantes de tiempo subtransitoria y transitoria, en circuito abierto, del generador.

9
El primer término de la Ecuación 2.2 representa la parte subtransitoria del fenómeno, el
segundo la parte transitoria y el tercero la corriente de régimen permanente de cortocircuito.
La suma de las ecuaciones 2.1 y 2.2 representa el valor instantáneo de la corriente total de
cortocircuito para cualquier instante de tiempo t , donde αdetermina el valor del ángulo de la
tensión en el instante de iniciarse el cortocircuito y es el ángulo de fase de la corriente.
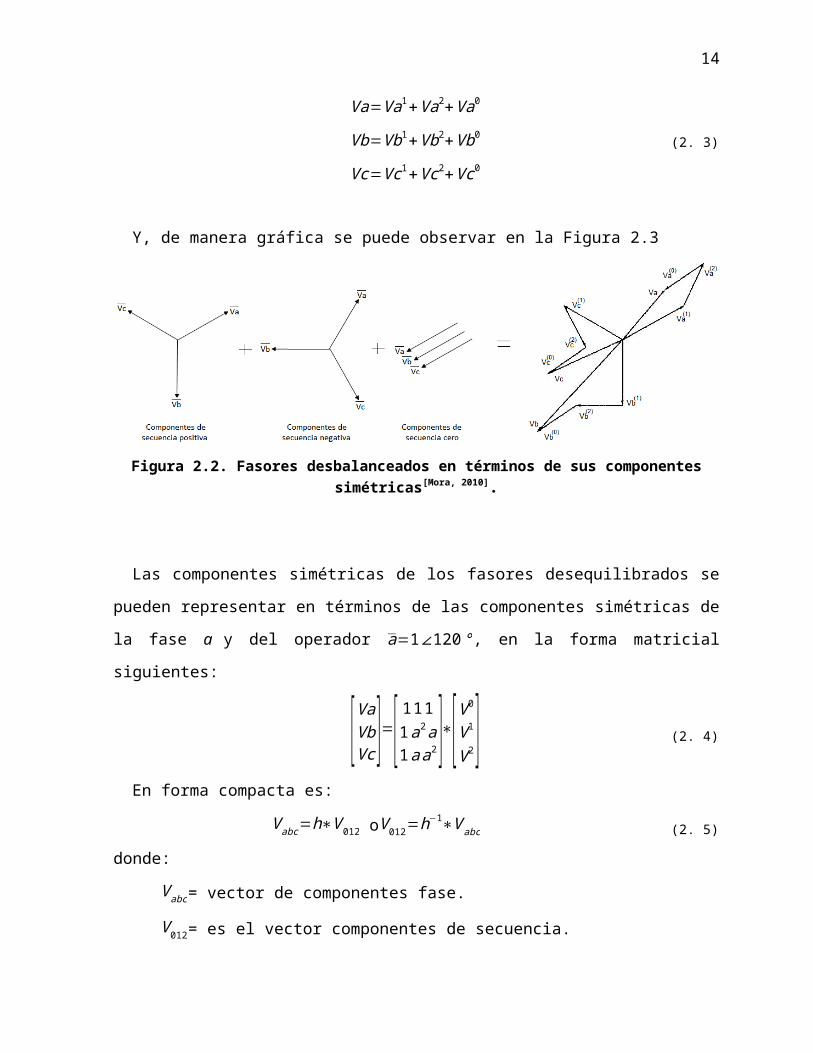
2.2 COMPONENTES SIMÉTRICAS
Este método está basado en el teorema de Fortescue, el cual establece que un sistema trifásico
de fasores desbalanceados, denominados componentes de fase, se pueden descomponer en tres
sistemas de fasores equilibrados, denominados componentes simétricas o coordenadas de
secuencia., las cuales son denominadas: componentes de secuencia positiva, componentes de
secuencia negativa y componentes de secuencia cero.
Así, de manera analítica se tiene:
Va=Va1+Va2+Va0
Vb=Vb1+Vb2+Vb0
Vc=Vc1+Vc2+Vc0
(2. 3)
Y, de manera gráfica se puede observar en la Figura 2.3
Figura 2.2. Fasores desbalanceados en términos de sus componentes simétricas[Mora, 2010].
10
Las componentes simétricas de los fasores desequilibrados se pueden representar en
términos de las componentes simétricas de la fase a y del operador a=1∠120°, en la forma
matricial siguientes:
[VaVbVc ]=[ 111
1a2a1a a2]∗[V
0
V 1
V 2] (2. 4)
En forma compacta es:
V abc=h∗V 012 oV 012=h−1∗V abc (2. 5)
donde:
V abc= vector de componentes fase.
V 012= es el vector componentes de secuencia.
h = matriz de transformación.
h=[ 1111 a2 a1 a a2]
h−1= es la matriz inversa de transformación.
h−1=13 [ 1 11
1a a2
1a2 a]2.3 DESFASAJE PRODUCIDOS POR LOS SISTEMAS DE
TRANSFORMACIÓN TRIFÁSICOS EN LAS DIFERENTES COMPONENTES SIMETRICAS
Según la Norma Americana ANSI las conexiones Y-Y y ∆-∆,en los sistemas de transformación
trifásicos, no producen ningún desfasaje entre las estrellas fasoriales del lado de alta tensión y
la del lado de baja tensión[Mora, 2010].
Mientras que para la configuración Y-∆ y ∆-Y, para la secuencia positiva la estrella fasorial
del lado de alta tensión adelanta 30° a la estrella fasorial del lado de baja tensión; y, para la
secuencia negativa la estrella fasorial del lado de alta tensión atrasa 30° a la estrella fasorial
del lado de baja tensión, tal como se observa en la siguiente figura:
11
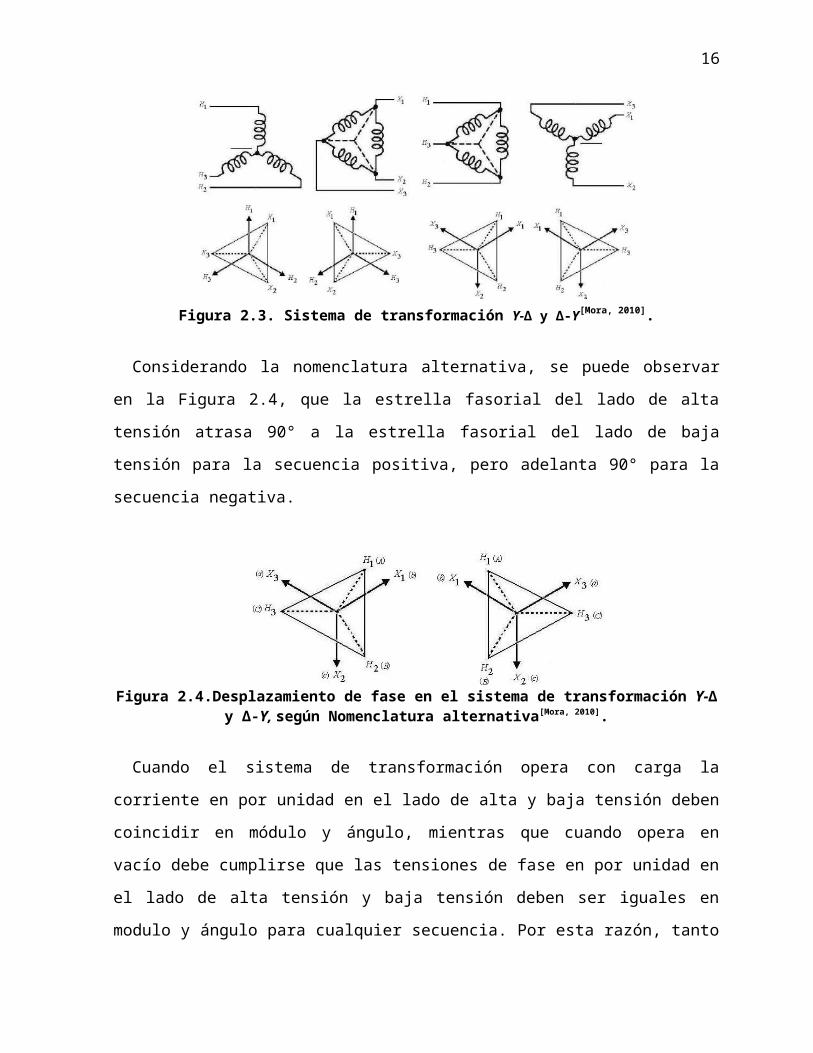
Figura 2.3. Sistema de transformación Y-∆ y ∆-Y[Mora, 2010].
Considerando la nomenclatura alternativa, se puede observar en la Figura 2.4, que la
estrella fasorial del lado de alta tensión atrasa 90° a la estrella fasorial del lado de baja tensión
para la secuencia positiva, pero adelanta 90° para la secuencia negativa.
Figura 2.4.Desplazamiento de fase en el sistema de transformación Y-∆ y ∆-Y, según Nomenclatura alternativa[Mora, 2010].
Cuando el sistema de transformación opera con carga la corriente en por unidad en el lado
de alta y baja tensión deben coincidir en módulo y ángulo, mientras que cuando opera en vacío
debe cumplirse que las tensiones de fase en por unidad en el lado de alta tensión y baja tensión
deben ser iguales en modulo y ángulo para cualquier secuencia. Por esta razón, tanto para la
secuencia positiva y negativa las estrellas fasoriales deberán ser rotadas 30º 0 90º dependiendo
de la nomenclatura utilizada para cumplir con lo anteriormente establecido.
En consecuencia, para la configuración Y-∆ y ∆-Y, se obtienen las siguientes relaciones
fasoriales, cuando es utilizada la nomenclatura alternativa en el sistema de transformación:
12
a) Secuencia Positiva:
V A1 =− j V a
1 , V B1 =− j V b
1 ,V C1 =− j V c
1 ( p . u . )
I A1 =− j I a
1 , I B1 =− j I b
1 , I C1 =− j I c
1( p . u.)(2. 6)
b) Secuencia Negativa:
V A2 = j V a
2 ,V B2= jV b
2 ,V C2 = jV c
2 ( p .u . )
I A2 = j I a
2 , I B2 = j I b
2 , I C2 = j I c
2( p .u .)(2. 7)
2.4 ANÁLISIS DE FALLOS EN COORDENADAS DE SECUENCIA
En general, el fallo trifásico es considerado el fallo más severo. Sin embargo, el fallo de línea
a tierra podría ser mayor bajo dos circunstancias: a) Cuando los generadores involucrados en
el fallo, tienen el neutro sólidamente aterrado o a través de impedancias de magnitud baja y b)
cuando este ocurre en el lado conectado en estrella, aterrada, de un banco de transformación
conectado delta - estrella. La corriente debida a un fallo de línea a línea es aproximadamente
86.6 por ciento de la corriente debida a un fallo simétrico o corto circuito trifásico.
Dependiendo del tipo de fallo pueden circulan todas las corrientes de secuencia o sólo
algunas de ellas. En los fallos de línea a tierra y de doble línea a tierra, circulan las tres
corrientes de secuencia; en los fallos de línea a línea circulan sólo las corrientes de secuencia
positiva y negativa; mientras que en los fallos trifásicos circula únicamente la corriente de
secuencia positiva. De esta manera, para el cálculo de las corrientes de cortocircuito, es
necesario determinar la forma como se deben interconectar las redes de secuencia, para
modelar adecuadamente cada tipo de fallo.
13
2.4.1 MÉTODO PARA DETERMINAR LA FORMA DE CONEXIÓN DE LAS REDES DE SECUENCIA
Para determinar las conexiones de las redes de secuencia, en los diferentes fallos se siguen los
siguientes pasos:
a) Obtener el diagrama circuital, indicando las corrientes de fallo de cada fase, los voltajes de
cada fase y las impedancias existentes.
Figura 2.5. Diagrama circuital genérico.
b) Determinan las condiciones de frontera de tensiones y corrientes en coordenadas de fases.
c) Determinan las condiciones de frontera de tensiones y corrientes en coordenadas de
secuencia.
d) Obtener la conexión de las redes de secuencia según el tipo de fallo, a partir de las
relaciones de las tensiones y corrientes obtenidas para las condiciones de frontera. .
Al aplicar los pasos anteriores, para todos los fallos se obtiene, la siguiente ecuación
general, la cual resume las relaciones de las tensiones y corrientes, de acuerdo a las
condiciones de frontera, en coordenadas de secuencia[Dhar, 1982]:
A V s+B I s=0 (2. 8)
14
2.4.1.1 Fallos Línea-Tierra: En este cortocircuito la corriente está afectada por la forma
en que se encuentran los neutros del sistema conectados a tierra, ya que representan los puntos
de retorno para la circulación de las corrientes desequilibradas.
Siguiendo el método del numeral 2.4.1, para hallar la interconexión de las redes de
secuencia, se tiene:
a) Diagrama circuital.
En la Figura 2.6 se muestra el diagrama circuital.
Figura 2.6. Diagrama de un Fallo de línea a tierra en F[Mora, 2010].
b) Condiciones de frontera de tensión y corriente de las componentes de fase.
Por inspección de la Figura 2.6 se obtiene:
I b=I c=0 yVa=0 (2. 9)
c) Condiciones de frontera de tensión y corriente en coordenadas de secuencia.
I 012=h−1∗I abc (2. 10)
De la ecuación anterior, se obtiene:
Ia0=Ia1=Ia2=13∗Ia (2. 11)
Va0+Va1+Va2=0 (2. 12)
Las relaciones anteriores pueden expresarse según la Ecuación 2.8, de la siguiente manera:
15
[11100 000 0]∗[V
0
V 1
V 2]+[ 0 0 01−1001−1]∗[ I 0
I 1
I 2]=0 (2. 13)
d) Obtención de la conexión de las redes de secuencia.
De la ecuación 2.13, se observa que las redes de secuencia deben ser conectadas en serie, tal
como se indica a continuación.
Corregir la impedancia 3Zf no debe aparecer
Figura 2.7. Conexión de las redes de secuencia para un fallo Línea-Tierra
A partir del circuito equivalente obtenido, en la figura anterior, se puede calcular las
componentes de secuencia en el punto de fallo, es decir:
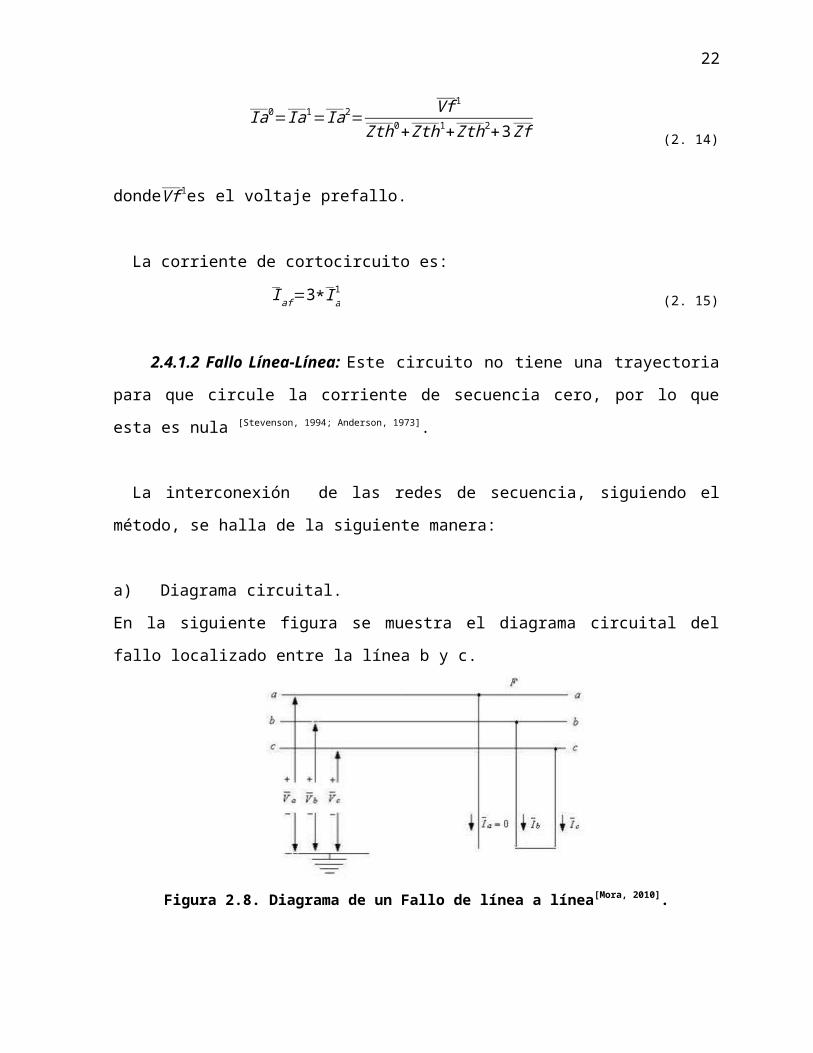
Ia0=Ia1=Ia2= Vf 1
Zth0+Zth1+Zth2+3 Zf (2. 14)
dondeVf 1es el voltaje prefallo.
La corriente de cortocircuito es:
I af=3*I a1
(2. 15)
2.4.1.2 Fallo Línea-Línea: Este circuito no tiene una trayectoria para que circule la
corriente de secuencia cero, por lo que esta es nula [Stevenson, 1994; Anderson, 1973].
La interconexión de las redes de secuencia, siguiendo el método, se halla de la siguiente
manera:

16
a) Diagrama circuital.
En la siguiente figura se muestra el diagrama circuital del fallo localizado entre la línea b y c.
Figura 2.8. Diagrama de un Fallo de línea a línea[Mora, 2010].
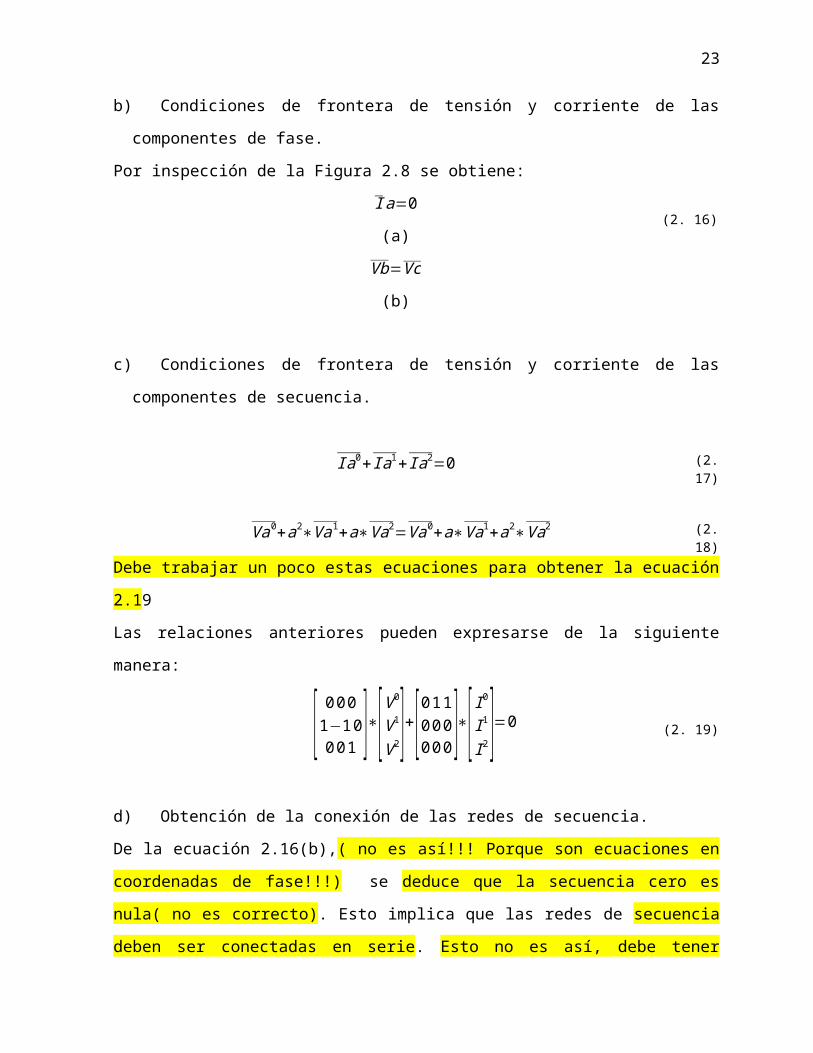
b) Condiciones de frontera de tensión y corriente de las componentes de fase.
Por inspección de la Figura 2.8 se obtiene:
I a=0 (a)
Vb=Vc (b)(2. 16)
c) Condiciones de frontera de tensión y corriente de las componentes de secuencia.
Ia0+ Ia1+ Ia2=0 (2. 17)
Va0+a2∗Va1+a∗Va2=Va0+a∗Va1+a2∗Va2(2. 18)
Debe trabajar un poco estas ecuaciones para obtener la ecuación 2.19
Las relaciones anteriores pueden expresarse de la siguiente manera:
[ 0001−1 0001 ]∗[V
0
V 1
V 2]+[0 110 000 00]∗[ I 0
I 1
I 2]=0 (2. 19)
d) Obtención de la conexión de las redes de secuencia.
De la ecuación 2.16(b),( no es así!!! Porque son ecuaciones en coordenadas de fase!!!) se
deduce que la secuencia cero es nula( no es correcto). Esto implica que las redes de secuencia

17
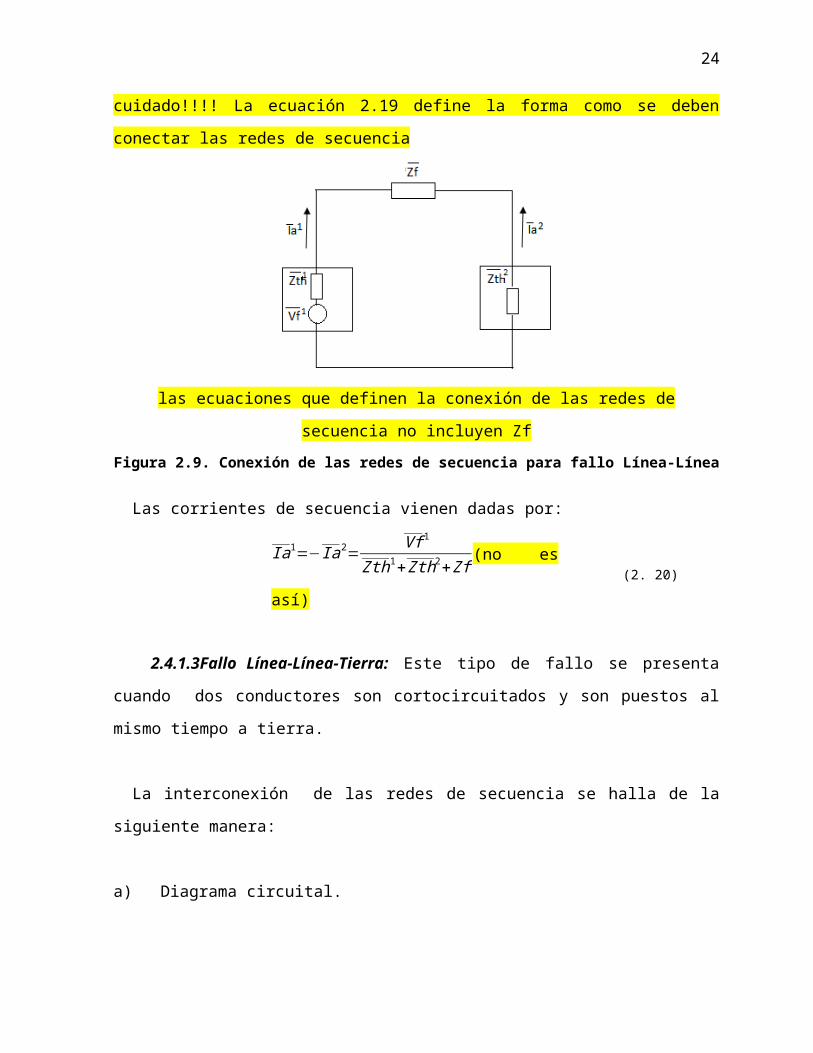
deben ser conectadas en serie. Esto no es así, debe tener cuidado!!!! La ecuación 2.19 define la
forma como se deben conectar las redes de secuencia
las ecuaciones que definen la conexión de las redes de secuencia no incluyen Zf
Figura 2.9. Conexión de las redes de secuencia para fallo Línea-Línea
Las corrientes de secuencia vienen dadas por:
Ia1=−Ia2= Vf 1
Zth1+Zth2+Zf(no es así) (2. 20)
2.4.1.3Fallo Línea-Línea-Tierra: Este tipo de fallo se presenta cuando dos conductores
son cortocircuitados y son puestos al mismo tiempo a tierra.
La interconexión de las redes de secuencia se halla de la siguiente manera:
a) Diagrama circuital.
En la siguiente figura se muestra el diagrama de fallo localizado entre la línea b y c:
18
Figura 2.10. Diagrama de un Fallo de línea a línea a tierra[Mora, 2010]
b) Condiciones de frontera de tensión y corriente de las componentes de fases.
Por inspección de la Figura 2.10 se obtiene:
I a=0
Vb=¿ Vc=0 (2. 21)
c) Transformación de las corrientes de línea en sus componentes simétricas.
I a=0=(Ia0+ Ia1+ Ia2)
Tiene que trabajar más las ecuaciones en
coordenadas de fase para obtener la
ecuación 2.23 No entiendo porque crea una
tabla aquí!!!!!
(2. 22)
Las relaciones anteriores pueden expresarse según la Ecuación 2.8 de la siguiente manera:
[ 0001−1 0011 ]∗[V
0
V 1
V 2]+[1 110 000 00]∗[ I 0
I 1
I 2]=0 (2. 23)
d) Obtención de la conexión de las redes de secuencia.
De la ecuación 2.22, Esto no esta claro!! se observa que los terminales de las redes de
secuencia deben ser conectados a un nodo común. Las tres redes de secuencia deben
conectarse en paralelo como lo muestra la siguiente figura:
Figura 2.11. Conexión de redes de secuencia para fallo Línea-Línea-Tierra

19
Las corrientes de secuencia vienen dadas de la siguiente forma:
Ia1= Vf 1
Zth1+Zth2 ∕ ∕ Zth0 (2. 24)
Para la corriente de secuencia negativa y la de secuencia cero, se aplica divisor de corriente.
2.4.1.4 Fallo Trifásico: Este tipo de fallos no originan desbalance entre las fases, y
debidos a cortocircuitos trifásicos que ocurren con más frecuencia en las líneas de transmisión
que en cualquier otra parte del sistema. Al hacer uso del método de las componentes
simétricas el estudio de este tipo de fallos se hace muy simple, ya que la corriente total de
cortocircuito es la suma de las tres corrientes de secuencia (siendo estas calculadas para cada
secuencia por separado).
a) Diagrama circuital.
En la Figura 2.12 se muestra el diagrama circuital del fallo.
b) Condiciones de frontera de tensión y corriente de las componentes de fase.
Por inspección de la Figura 2.12 se obtiene:
Va=Vb=Vc=0 (2. 25)
c) Condiciones de frontera de tensión y corriente de las componentes de secuencia,
Va0=Va1=Ia2=0? ? ?? ? ?? ? ? (2. 26)
Tenga cuidado!!! Haga las cosas con calma debe trabajar mejor esto para obtener 2.27!!!!!
Figura 2.12. Diagrama de un Fallo Trifásico[Mora, 2010].
20
Las relaciones anteriores pueden expresarse según la Ecuación 2.8 de la siguiente manera:
[10001000 1]∗[V
0
V 1
V 2]+[00 000 000 0]∗[I
0
I 1
I 2]=0 (2. 27)
d) Obtención de la conexión de las redes de secuencia. De donde obtiene esta conexión???
Figura 2.13. Conexión de redes de secuencia para un Fallo Trifásico.
2.5MÉTODO GENERAL DE CÁLCULO DE LA CORRIENTE DE CORTOCIRCUITO
La corriente de cortocircuito se basa en la obtención del valor rms de la corriente simétrica sin
considerar los decrementos AC y DC de la envolvente. Esta es calculada a partir de la
aplicación del Teorema de Thévenin y superposición.
2.5.1 MÉTODO GENERAL DE SOLUCIÓN BASADO EN EL TEOREMA DE
THÉVENIN EN COORDENADAS DE SECUENCIA
Usando la matriz de impedancia Zseq, la matriz de secuencia de corrientes y voltajes puede ser
escrita como la Ecuación 2.28.
∆ V seq=Zseq∗I seq (2. 28)
En la relación siguiente, ∆ V seq es un vector, cada elemento es un subvector de tres
componentes, que contiene las componentes de secuencia de una barra de voltaje en particular.
21
Representado por la Ecuación 2.29. De igual manera ocurre con I seq, representada por la
Ecuación 2.30.
V is=[V i0
V i1
V i2] (2. 29)
I is=[ I 0
I i1
I i2] (2. 30)
Zis=[Z i0
Z1
Z i2] (2. 31)
Al considerar que ocurre una falla en la barra k. Aplicando el Teorema de Thévenin la
siguiente ecuación puede ser escrita involucrando las redes de secuencia:
V seqf =V seq
0 +Zseq∗I seqf (2. 32)
donde:
V seqf = voltaje postfallo.
V seq0 = voltaje prefallo.
Z seq = impedancia de secuencia.
I seqf = corriente de fallo.
Como el fallo ocurre en la barra k, sólo el elemento k-ésimo de I seqf tendrá un valor diferente
de cero.
I seqf =⌈
0⋮
I sk
⋮0
⌉ (2. 33)
Entonces para la Ecuación 2.32, cada uno se puede escribir:

22
V s 1=V s 10 +Zs 1k∗I sk
V s 2=V s 20 +Zs 2k∗I sk
⋮ ⋮ ⋮
V sk=V sk0 +Zskk∗I sk
⋮ ⋮ ⋮
V sn=V sn0 +Zsnk∗I sk
(2. 34)
Cada voltaje de las ecuaciones anteriores, es una cantidad de tres dimensiones que contiene las
tres componentes de secuencia. Cada una de las impedancias Z s 1 k, Z s 2 k, etc. es una matriz
diagonal de tres dimensiones que contiene las impedancias de secuencia.
2.5.2 APLICACIÓN MÉTODO DE LA MATRIZ DE IMPEDANCIA DE BARRA AL CÁLCULO DE LOS CAMBIOS EN LAS TENSIONES DE BARRAS DEBIDAS A CORTOCIRCUITOS
La matriz Z de barra puede ser obtenida de forma algorítmica, donde se obtiene una matriz
full, es decir sin ningún elemento nulo; y a partir de la matriz de admitancia Y de la siguiente
manera:
∆ V =Y−1 I =Zbarras I (2. 35)
donde:
Y −1 = la inversa de la matriz de admitancia de barra.
Zbarras = la matriz de impedancia de barra.
I = vector de corriente de fallo.
La matriz de impedancias de barra puede construirse, elemento por elemento, directamente
mediante algoritmos simples para incorporar un elemento a la vez dentro de la matriz de
impedancias de barra del sistema en estudio. Conceptualmente, resulta más simple invertir la
matriz de admitancias de barra, Ybarra , para encontrar la matriz de impedancias de barra, Zbarra,
pero la inversión directa de la matriz de admitancia se emplea en raras ocasiones. En la
práctica, solo se requieren algunos elementos de la matriz Zbarra en forma explícita, los cuales

23
pueden ser obtenidos a partir de la matriz Ybarra en forma factorizada, utilizando para ello las
técnicas de matrices ralas o dispersas[Mora, 2010]. En este numeral se estudiará cómo obtener los
elementos necesarios de la matriz de impedancia de barras, a partir de la matriz de admitancia
en forma factorizada.
Para la aplicación del método de la matriz Z de barras, cada red de secuencia es
caracterizada por su respectiva matriz de impedancias de barras. Así, las matrices de
impedancias de barras para las redes de secuencia positiva, negativa y cero, se pueden escribir
en la forma siguiente[Mora, 2010]
a) Red de Secuencia Positiva:
Zbarras1 =[
Z111 Z12
1 − Z1k1 − Z1 n
1
Z211 Z22
1 − Z2k1 − Z2 n
1
− − − − − −Z k1
1 Zk 21 − Zkk
1 − Zkn1
− − − − − −Zn1
1 Zn 21 − Znk
1 − Znn1
] (2. 36)
b) Red de Secuencia Negativa:
Zbarras2 =[
Z112 Z12
2 − Z1k2 − Z1 n
2
Z212 Z22
2 − Z2k2 − Z2 n
2
− − − − − −Z k1
2 Zk 22 − Zkk
2 − Zkn2
− − − − − −Zn1
2 Zn 22 − Znk
2 − Znn2
] (2. 37)
c) Red de Secuencia Cero:

24
Zbarras0 =[
Z110 Z12
0 − Z1k0 − Z1 n
0
Z210 Z22
0 − Z2k0 − Z2 n
0
− − − − − −Z k1
0 Zk 20 − Zkk
0 − Zkn0
− − − − − −Zn1
0 Zn 20 − Znk
0 − Znn0
] (2. 38)
El circuito equivalente de Thévenin, correspondiente a cada una de las redes de secuencias,
en el punto de fallo, puede ser determinado a partir de las matrices de impedancias de barras
obtenidas para cada una de las secuencias y del hecho de que antes del fallo solo circulan a
través del sistema de potencia corrientes de secuencia positiva, por ser este balanceado. De
esta manera si el punto de fallo corresponde a la barra K , se obtiene para cada una de las
redes de secuencia, entre la barra K y referencia, los circuitos equivalentes de Thévenin.
Cabe destacar, que no es necesario obtener toda la matriz de impedancia de barras, la cual
es cuadrada, simétrica y completamente llena, sino solamente los elementos de la columna
correspondiente a la barra k donde ocurre el fallo.
Y posteriormente se hallan los cambios en los voltajes en cada una de las barras de las
redes de secuencia pueden por medio del método de la matriz de impedancia. Para ello, se
inyecta en la barra donde se produce el fallo la componente de secuencia de la corriente de
cortocircuito correspondiente a la red de secuencia considerada y utilizando únicamente el
vector de admitancia de la barra fallada.
Así, los cambios en los voltajes, debido a la inyección de la corriente −I fak1
en la red de
secuencia positiva (+) del sistema de n barras, son dados, en términos generales:

25
[ΔV a1
1
ΔV a21
−−ΔV ak
1
−−ΔV an
1]=¿ [ Z1k
1 ¿ ] [ Z2 k1 ¿ ] [−¿ ] [ Zkk
1 ¿ ]¿¿
¿¿ (2. 39)
Igualmente, los cambios en las tensiones de secuencia negativa (-) y cero (0), debidos a un
fallo en la barra K , de un sistema de n barras, se obtienen de una manera similar como:
- Secuencia negativa:
[ΔV a1
2
ΔV a22
−−ΔV ak
2
−−ΔV an
2]=¿ [ Z1k
1 ¿ ] [ Z2 k1 ¿ ] [−¿ ] [ Zkk
1 ¿ ]¿¿
¿¿ (2. 40)
- Secuencia cero:
[ΔV a1
0
ΔV a20
−−ΔV ak
0
−−ΔV an
0]=¿ [ Z1k
1 ¿ ] [ Z2 k1 ¿ ] [−¿ ] [ Zkk
1 ¿ ]¿¿
¿¿ (2. 41)
Debe resaltarse otro de los beneficios de la aplicación de las técnicas de matrices ralas
(Sparsity), y es que el vector de corrientes inyectadas, posee un único elemento no nulo, que
es el de la corriente inyectada en la barra k.
26
Los cambios en las componentes de secuencia de las tensiones en las barras se deben
superponer a las componentes de secuencia de las tensiones de prefallo en las diferentes
barras del sistema, a la hora de calcular las componentes simétricas de las tensiones en las
barras de las redes de secuencia después de ocurrir el fallo,
Así, para la secuencia positiva, despreciando las corrientes de carga y asumiendo que las
tensiones en todas las barras del sistema son iguales a V f , se obtienen los voltajes de post
fallo a partir de la ecuación siguiente:
[V a 1
1
V a 21
−V ak
1
−V an
1]+ [
V f
V f
−V f
−V f
]+[ΔV a1
1
ΔV a21
−−ΔV ak
1
−−ΔV an
1]=[
V f−Z1 k1 ×I fak
1
V f−Z2 k1 ×I fak
1
−−V f −Zkk
1 ×I fak1
−−V f−Znk
1 ×I fak1
] (2. 42)
Mientras que para la secuencia negativa y cero las tensiones de postfallo son iguales a los
cambios en los voltajes de las barras del sistema debidas al fallo.
Así, al conocer las componentes simétricas I fak1 , I fak
2 e I fak0
de las corrientes de fallo en la
barra K , se pueden determinar los voltajes de secuencia de cualquier barra j−ésima del
sistema a partir de los voltajes de secuencia en cualquier barra j−ésima para un fallo en la
barraK , son determinados por:
Va j1=Vaf
1−Za jk1∗Iakf
1=Va j1∗(1−
Za jk1
Zakk1 )=(1−
Z a jk1
Z akk1 )
Va j2=−Za jk
2∗Iakf2
Va j0=−Za jk
0∗Iakf0
(2. 43)
Y, las corrientes de cortocircuito, a través de las diferentes ramas se calculan a partir de:
27
I ij1=
V i1−V j
1
Zb1 =
∆ V i1−∆ V j
1
Zb1 =
−1
Zb1 (Z ik
1−Z jk1
Zkk1 )
I ij2=
V i2−V j
2
Zb2 =
∆V i2−∆ V j
2
Zb2 =
−1
Zb2 (Z ik
2−Z jk2
Zkk2 )
I ij0=
V i0−V j
0
Zb0 =
∆ V i0−∆ V j
0
Zb0 =
−1
Zb0 (Z ik
0−Z jk0
Zkk0 )
(2. 44)
2.6 TÉCNICAS DE MATRICES RALAS (SPARSITY)
En el caso de matrices ralas de coeficientes, es decir, de matrices con un gran número de
elementos ceros, el ahorro significativo de tiempo de computación y de memoria puede ser
logrado si es diseñado un esquema de programación que almacene y procese solamente los
elementos no-nulos. Más aún la estructura rala de la matriz debe ser mantenida tanto como sea
posible[Mora, 2010].
La característica rala de las ecuaciones formuladas nodalmente, permite obtener soluciones
directas de manera muy eficiente por medio de la aplicación de las técnicas especiales de
programación de este tipo de matrices, es decir, almacenamiento compacto de la matriz,
simulación del orden óptimo de eliminación, factorización de la matriz y solución por medio
del método R-L o bifactorización, explicado posteriormente.
La matriz de admitancia de un sistema práctico de potencia es altamente rala y en
consecuencia tomando ventaja de esta característica, en vez de almacenar todos los elementos
de la matriz en un arreglo bidimensional, solamente son almacenados los elementos no nulos,
utilizando un esquema compacto de almacenamiento basado en la técnica de listas vinculadas,
a partir de la cual se puede construir cualquier fila o columna de la matriz original, de manera
tal que el requerimiento de memoria de computador disminuye sustancialmente [Mega, 2003; Mora,
2010].En general, los problemas prácticos pueden ser clasificados en tres categorías, los cuales
se indican a continuación:
28
a) Una solución simple de la ecuación AX=B es requerida para una matriz de coeficientes A
dada y un vector B dado.
b) Diferentes soluciones son requeridas para una matriz de coeficientes dada y diferentes
vectores B.
c) Diferentes soluciones son requeridas para diferentes matrices de coeficientes pero con la
misma estructura rala y con diferentes valores numéricos.
Resulta evidente, de todo lo visto previamente, que la programación de sistemas ralos
pueden ser relativamente complicados y en consecuencia debe ser ejecutado eficientemente y
el programa debe, por lo tanto, ser organizado de tal forma que las soluciones a los diferentes
grupos de problemas puedan ser encontradas sin tantos cálculos repetitivos innecesarios. Por
ejemplo, cuando la solución es requerida para diferentes vectores independientes, B, la misma
matriz factorizada puede ser utilizada. Similarmente, cuando diferentes soluciones son
requeridas con diferentes matrices de coeficientes teniendo la misma estructura rala, la
secuencia original de eliminación previamente encontrada durante el proceso de simulación
puede ser utilizada para todas las soluciones requeridas.
A partir de esta discusión se puede observar que el problema global debe ser
convenientemente subdividido en diferentes subproblemas, es decir, almacenamiento
compacto, simulación del orden de eliminación, factorización y solución.
Los principios básicos involucrados en las cuatro subproblemas son los siguientes:
a) Almacenamiento Compacto.
Esto involucra la obtención de los elementos no nulos de la matriz de coeficientes a partir
de la información básica de la red y el almacenamiento de ellos en forma compacta. Ya que
solamente los elementos no nulos son almacenados y no la matriz completa, es necesario
incorporar un esquema de direccionamiento muy eficiente para localizar e identificar cada
elemento. Para este proceso se utilizan una serie de vectores o listas vinculadas que contienen
la posición y valores de cada elemento de la matriz:

29
ITAG (nz):
Es un vector de nz elementos, el cual indica la fila en donde se encuentra el elemento.
LNXT (nz):
Es un vector de nz elementos, el cual indica la unidad de almacenamiento del próximo
elemento. Si este es cero, indica que no hay más elementos distintos de cero.
LCOL(n):
Es un vector de n elementos, el cual indica la unidad de almacenamiento del primer
elemento distinto de cero, de cada columna.
NOZE(n):
Es un vector de n elementos, el cual indica la cantidad de elementos nulos por columna.
NSEQ(n):
Es un vector de n elementos, el cual indica el orden de eliminación de las columnas en la
factorización.
b) Simulación del Orden de Eliminación.
En esta subrutina se establece el orden de eliminación, dado por el vector NSEQ.
Utilizando un esquema de ordenamiento dinámico podemos simular el efecto de la
característica rala del sistema en la eliminación antes de efectuar las operaciones aritméticas.
El tiempo extra empleado en el proceso de simulación resulta de un gran valor ya que una vez
establecido el orden de eliminación, este permanece inmodificable para cualquier problema
teniendo la misma estructura rala. De esta manera, para aquellos problemas que requieren una
solución iterativa, aunque los coeficientes podrían cambiar numéricamente de una iteración a
otra, la estructura rala puede permanecer inalterada.
c) Factorización.

30
En esta subrutina se factoriza la matriz de coeficientes de acuerdo a el orden de eliminación
determinado durante el proceso de simulación. Las operaciones son realizadas solamente
utilizando los elementos no nulos de la matriz son almacenados. Para matrices de coeficientes
simétricas, utilizando el método de bifactorización o uno de los métodos de descomposición
triangular, expuestos más adelante, solamente los elementos no-nulos del factor matricial de la
izquierda o de la matriz triangular inferior necesitan ser almacenados, lo cual reduce el
requerimiento de memoria aproximadamente en la mitad.
d) Solución Numérica.
Este es el paso final del proceso de cálculo y consiste en la determinación de los valores
numéricos de las variables desconocidas utilizando los factores matriciales y el vector B de la
ecuación original.
FIN
FIN
FIN
TODAS
LAS
TODAS
LAS
SOLUCIÓN
FACTORIZACIÓN
SIMULACIÓN
COMPACTACIÓN
DATOS DE ENTRADA
SOLUCIÓN
FACTORIZACIÓN
SIMULACIÓN
COMPACTACIÓN
DATOS DE ENTRADA
SOLUCIÓN
FACTORIZACIÓN
SIMULACIÓN
COMPACTACIÓN
DATOS DE ENTRADA
31
Figura 2.14.Diagramas de flujo típicos para análisis de problemas de redes: (A) solución simple,
(B) solución múltiple con diferentes vectores B, (C) solución múltiple con diferentes matrices de
coeficientes con la misma estructura rala.
2.6.1 MÉTODOS DE FACTORIZACIÓN
Los métodos de factorización de matrices se basan en modificaciones de la técnica básica de
eliminación de Gauss. En esos métodos, la inversa de una matriz no es calculada
explícitamente pero explota la propiedad de que una matriz puede ser representada por medio
del producto de un número determinado de factores matriciales. También, aprovechando las
técnicas de matrices ralas en la aplicación de esos métodos, el número de operaciones y los
requerimientos de almacenamiento pueden ser reducidos drásticamente. Existen varios
métodos de factorización disponibles, siendo el de descomposición triangular uno de los
métodos más efectivos y ampliamente utilizados, en el cual se basan varias técnicas modernas
y eficientes[Anderson, 1973]. Los dos métodos que serán discutidos a continuación son conocidos
como los métodos de descomposición triangular LU y LDU .
2.6.1.1 Transformación LU : el método de factorización LU consiste en expresar la
matriz de coeficiente A como el producto de dos factores matriciales, tal como:
A=LU (2. 45)
Donde L representa la matriz triangular inferior y U la matriz triangular superior en la cual
todos los elementos de la diagonal principal son iguales a la unidad.
Si el conjunto de ecuaciones simultáneas pueden ser formuladas en forma matricial, como:
AX = B (2. 46)

32
Entonces sustituyendo la Ecuación 2.45 en la Ecuación 2.46, se obtiene:
LUX = B (2. 47)
Haciendo:
UX = Y (2. 48)
A partir de las ecuaciones 2.47 y 2.48, se obtiene:
LY = B (2. 49)
Como Les la matriz triangular inferior, entonces a partir de Ly B el vector Y de la Ecuación
2.48 puede ser calculado utilizando el método de sustitución hacia adelante, de la misma
manera el vector desconocidoX , puede ser encontrado utilizando el método de sustitución
hacia atrás.
2.6.1.2 Transformación LDU : La técnica de descomposición triangular, descrita
previamente sirve de base de técnicas muy modernas y eficientes de factorización. Es evidente
a partir de los ejemplos numéricos que los elementos de la columna I de la matriz triangular L
son diferentes de los elementos de la fila I de U . Esto significa que las matrices triangulares L
y U deben ser conocidas explícitamente y ambas, por lo tanto, deben ser almacenadas. En el
caso de matrices de coeficientes simétricas, este problema puede ser simplificado si se
descompone un poco más la matriz triangular inferior, L. Este método conocido como
factorización LDU , expresa la matriz de coeficientes original como el producto de tres
factores matriciales, tal como se muestra a continuación:
A=L’ DU (2. 50)
donde:
=matriz triangular inferior con elementos unidad en la diagonal principal.
U = matriz triangular superior con elementos unidad en la diagonal principal.

33
D=matriz diagonal con todos los elementos nulos fuera de la diagonal principal.
Si A es la matriz de coeficientes de la ecuación matricial siguiente:
AX=B (2. 51)
Apuede ser expresada como:
A=L' DU(2. 52)
De las ecuaciones 2.51 y 2.52, se obtiene:
L' DU X=B(2. 53)
Haciendo:
UX=Y (2. 54)
DY =Y ' (2. 55)
A partir de las ecuaciones 2.53 – 2.55, se obtiene:
L' Y '=B(2. 56)
Los elementos de Y ' pueden ser obtenidos a partir de L' y B por sustitución hacia adelante,
utilizando la ecuación 2.56, luego los elementos de Y a partir de D y Y ' utilizando la ecuación
2.55, y finalmente los elementos de X pueden ser obtenidos a partir de U y Y por sustitución
hacia atrás, utilizando la ecuación 2.54.
Esta descomposición es realizada, factorizando primero la matriz de coeficientes original en
las matrices triangulares superior e inferior, L y U , tal como fue descrito previamente. La
matriz triangular L es entonces factorizada en L' y D. La matriz diagonal D consiste de los
elementos de la diagonal principal de L. La nueva matriz triangular L' es obtenida a partir de
L dividiendo los elementos de cada columna por el elemento de la diagonal de esa columna.

34
2.6.1.3 Transformación R-L o bifactorización: el método de bifactorización,
desarrollado por Zollenkopf es una de las modificaciones más recientes a la técnica de
eliminación de Gauss. Es particularmente apropiado para resolver sistemas ralos muy grandes
donde los elementos de la diagonal principal son no nulos y predominantes sobre los
elementos de las diagonales secundarias, las cuales son simétricas o en caso de ser asimétricas
tienen una estructura casi simétrica. El método combina la técnica de triangularización y la
formación de factores para expresar la inversa de una matriz A como el producto de 2n
matrices.
El método está basado en encontrar 2n factores matriciales para un sistema de orden nth, de
tal forma que el producto de esos factores matriciales satisface la ecuación siguiente:
Ln Ln−1 …… .. L2 L1 AR1 R2……… Rn−1 Rn=I(2. 57)
donde:
A=matriz de coeficientes
L=factor matricial izquierdo
R=factor matricial derecho
I = matriz unidad
Premultiplicando la Ecuación 2.57 por la inversa de Ln Ln−1 .. .. L2 L1, en forma consecutiva,
se obtiene:
A R1 R2……. Rn−1 Rn=(L1)−1(L2)−1 ………(L¿¿n−1)−1(L¿¿n)−1 ¿¿ (2. 58)
Postmultiplicando la ecuación anterior por Ln Ln−1 ……. L2 L1 consecutivamente, da:
A R1 R2…… …Rn−1 Rn Ln Ln−1 ………. L2 L1=I (2. 59)
Finalmente premultiplicando la Ecuación 2.59, se obtiene:
R1 R2 ………Rn−1 Rn Ln Ln−1 ………. L2 L1=A−1 (2. 60)
Los factores matriciales son obtenidos a partir de:
35
Lk=[1 . . . . . .. ⋱ . . . . .
.
.
.
.
.
.
.
.
.
.
Lkkk . . . .
Likk 1 . . .
⋮⋮
Lnkk
.
.
.
⋱ . .. ⋱ .. . 1
] (2. 61)
Rk=[1 . . . . . .. ⋱ . . . . .
.
.
.
.
.
.
.
.
.
.
1 Rkjk … . Rnk
k
. 1 . . .⋮⋮.
.
.
.
⋱ . .. ⋱ .. . 1
] (2. 62)
donde:
Lkkk = 1
akkk−1
Likk =
−aikk−1
akkk−1 (i=k+1 , ……. , n)
Rkjk =
−akjk−1
akkk−1 ( j=k+1 , ……. ,n) (2. 63)
a ijk=aij
k−1−aik
k−1akjk−1
akkk−1 ( i=k+1 ,……, n ) ;( j=k+1 ,……, n)
Para una matriz simétrica, se cumple:
a ikk−1=aki
k−1 (2. 64)
Por lo tanto,
Rikk =Lki
k (2. 65)

36
En el caso de una matriz de coeficientes simétrica, solamente es necesario evaluar los
elementos de Lk. Por lo tanto, en este caso, el número de operaciones y la cantidad de espacio
de almacenamiento se reduce casi a la mitad. La solución de las ecuaciones originales, pueden
ahora ser encontradas a partir de:
A−1=R1 R2…. Rn−1 Rn Ln Ln−1…. L2 L1 (2. 66)
y como Rn es una matriz unidad entonces la solución es dada por:
X=R1 R2…. Rn−1 Ln Ln−1 ….L2 L1 B(2. 67)
2.6.2 APLICACIÓN DE LAS TÉCNICAS DE MATRICES RALAS (SPARSITY) AL CÁLCULO DE LA CORRIENTE DE CORTOCIRCUITO EN COORDENDAS DE
SECUENCIA
La Ecuación 2.35, en coordenadas de secuencia, en base al método de bifactorización son
presentadas a continuación:
∆ V 0=R10 R2
0… Rk0… Rn−1
0 Rn0 Ln
0 Ln−10 … Lk
0… L20 L1
0 I 0
∆ V 1=R11 R2
1 …Rk1… Rn−1
1 Rn1 Ln
1 Ln−11 … Lk
1… L21 L1
1 I 1
∆ V 2=R12 R2
2 … Rk2 …Rn−1
2 Rn2 Ln
2 Ln−12… Lk
2 … L22 L1
2 I 2
(2. 68)
Donde la inversa de la matriz de admitancia de barras, Y −1, en forma factorizada en base al
método de transformación RL, es presentada a continuación:
Y −1=R1 R2 … Rk … Rn−1 Rn Ln Ln−1… Lk … L2 L1 (2. 69)
Donde los factores matriciales de la izquierda son calculados a partir de la ecuación 2.61, y
a partir de estos, se calculan los de la derecha, por ser la matriz simétrica.
Para capturar el vector correspondiente a la barra donde ocurre el fallo se inyecta en esta barra
una corriente unitaria, es decir:

37
I=⌈
0⋮1⋮0
⌉ (2. 70)
De tal manera, que para cualquier secuencia se obtiene:
∆ V =R1 R2… Rk … Rn−1 Rn Ln Ln−1 …Lk … L2 L1∗⌈
0⋮1⋮0
⌉=[Z1 K
⋮Z KK
⋮Z NK
] (2. 71)
2.7 CÁLCULO DE LOS FACTORES MATRICIALES EN FORMA DESACOPLADA
En forma desacoplada los elementos de los factores matriciales de la izquierda y de la derecha
son obtenidos a partir de las expresiones siguientes[Mora, 2010]:
- Lkkk :
Lk kk =LR kk
k + j LI kkk =
Gkkk−1
(G¿¿ kkk−1)2+(B¿¿kkk−1)2+ jBkk
k−1
(G¿¿ kkk−1)2+(B ¿¿kkk−1)2¿¿¿¿
En forma desacoplada se tiene:
Parte real:LRkk
k =Gkk
k−1
(G¿¿kk k−1)2+(B¿¿ kkk−1)2 ¿¿ (2. 72)
Parte imaginaria:LI kk
k =Bkk
k−1
(G¿¿kkk−1)2+(B ¿¿kkk−1)2¿¿ (2. 73)
- Likk :
38
Likk =LRik
k + j LI ikk =
−Y 1 kk−1
Y kkk−1 =Lkk
k ∗(−Y ijk−1)
Likk =(LR¿¿kkk+ j LI kk
k )¿¿ (2. 74)
Donde en forma desacoplada:
Parte real: LRikk =−( LRkk
k ¿Gikk−1−LI kk
k ∗Bikk−1 ) (2. 75)
Parte imaginaria: LI ikk =−(LRkk
k ¿ Bikk−1−LI kk
k ∗Gikk−1 ) (2. 76)
Elementos de la matriz reducida:
- Y ijk :
Y ijk=Y ij
k−1−Y 1 k
k−1∗Y kjk−1
Y kkk−1 =Y ij
k−1+Likk−1
*Y kjk−1
Y ijk=¿
Y ijk=(G¿¿ ijk−1)+ j(B ¿¿ ijk−1)+¿¿¿
(2. 77)En forma desacoplada:
Parte real: Gijk=Gij
k−1+¿ (2. 78)
Parte imaginaria: Bijk=B ij
k−1+((L Rikk−1 ) (Bkj
k−1 )+(LI ikk−1)(G kj
k−1)) (2. 79)
2.7.1 SOLUCIÓN EN FORMA DESACOPLADA
La solución de la ecuación 2.69 se obtiene a partir de:
a) El producto de los factores matriciales de la izquierda (L) por el vector independiente (I):
39
[VL1
k
.…
VLkk
VLik
……
VLnk
]=[1 . . . . . .. ⋱ . . . . .
.
.
.
.
.
.
.
.
.
.
Lkkk . . . .
Likk 1 . . .
⋮⋮
Lnkk
.
.
.
⋱ . .. ⋱ .. . 1
¿
]∗¿ (2. 80)
La solución general a partir de la ecuación anterior se obtiene a partir de:
VLik=VLi
k−1+Likk ∗VLk
k−1(2. 81)
En forma desacoplada, se obtiene:
VLik=VLRi
k−1+ j VLI ik−1+(LR¿¿ ik k+ j LI ik
k )(VLR kk−1+VLI k
k−1)¿
VLik=VLRi
k−1+ jVLI ik−1+¿
(2. 82)
Parte real: VLRik=VLRi
k−1+(LR¿¿ ik k∗VLRkk−1−LI ik
k ∗VLI kk−1)¿ (2. 83)
Parte imaginaria: VLI ik=VLI i
k −1+(LR¿¿ ik k∗VLI kk−1+LI ik
k ∗VLRkk−1)¿ (2. 84)
b) El producto de los factores matriciales de la derecha (R) por el vector VRk−1:
[VR1
k
.…
VRkk
VRik
……
VRnk
]=[¿1 . . . . . .. ⋱ . . . . ......
.
.
.
.
.
1 Rkjk … . Rnk
k
. 1 . . .⋮⋮.
.
.
.
⋱ . .. ⋱ .. . 1
¿
]∗[VR1
k −1
.…
VR kk−1
…VR j
k−1
…VRn
k−1
] (2. 85)
La solución general de esta ecuación es obtenida a partir de:

40
VRkk=VLi
k −1+ ∑j=k+1
n
Rkjk ∗VR j
k−1(2. 86)
donde:
VRkk=VRRk
k−1+ jVRI kk−1+ ∑
j=k+1
n
(LR¿¿ jk k+ j LI jkk )(VLR j
k−1+VLI jk−1)¿
VRkk=VRRk
k−1+ jVRI ik−1+ ∑
j=k+1
n¿¿¿
(2. 87)
En forma desacoplada:
Parte real: VRRkk=VRRk
k−1+ ∑j=k+1
n
¿¿ (2. 88)
Parte
imaginaria:
VRIkk=VRIk
k−1+ ∑j=k +1
n
¿¿(2. 89)
2.8 CÁLCULO DE LA CORRIENTE DE CORTOCIRCUITO DE ACUERDO A LA NORMA ANSI/IEEE C.37.010
La Norma IEEE usa el concepto de ‘local’ y ‘remoto’ en cuanto a la contribución en los
cortocircuito. Si la reactancia externa entre los terminales del generador y la localización del
cortocircuito cumple con X external ˃1.5 X d¿ , el generados es considerado como remoto. De otra
manera es considerado local. El estándar IEEE recomienda dejar de lado las impedancias de
derivación de cargas estáticas, así como la línea de capacitancia de secuencia positiva. Las
reactancias de la secuencia positiva y negativa se suponen iguales y lo mismo para las
resistencias[Nasser, 2008].Se consideran los fallos trifásicos y monofásicos por ser los que presentan
las corrientes más altas al momento de un cortocircuito.
Este estándar permite calcular los valores de corriente simétrica correspondiente a la corriente
de ½ ciclo y a la corriente de interrupción en 2, 3,5 ó 8 ciclos de la corriente de cortocircuito
Las corrientes obtenidas de la red de primer ciclo son la base para comparar con capacidades
interruptivas de fusibles y breakers de baja tensión, mientras que las corrientes obtenidas de la
41
red de interrupción son la base para comparar con capacidades interruptivas de breakers de
media y alta tensión. Estas dos redes difieren en las reactancias de las máquinas giratorias de
acuerdo a la Tabla 2.1.
2.8.1 CÁLCULO DE LA CORRIENTE SIMÉTRICA AJUSTADA POR LOS DECREMENTOS AC Y DC
Para el instante de apertura de los contactos del interruptor de potencia, el valor rms de la
corriente simétrica ajustada por los decrementos de las componentes AC y DC es obtenida
aproximadamente por la siguiente expresión[Mora, 2010]:
I ac '=I ac x Fm ' (2. 90)
donde:
I ac '=valor rms de la corriente ajustada por los decrementos de las componentes AC y DC.
I ac=valor rms de la corriente simétrica sin ajustar.
Fm '= factor de multiplicación, toma en cuenta los decrementos AC y DC.
Los factores de multiplicación son obtenidos a partir de las curvas en las Figuras 2.15, 2.16
y 2.17, y dependen del punto donde ocurre el fallo en el sistema de potencia, es decir, la
relación X/R, y del tiempo mínimo de separación de contactos. Y, el valor rms de la corriente
simétrica sin ajustar, es calculado en forma aproximada por medio del método fasorial y el
teorema de Thévenin, a partir de la expresión siguiente:
a¿ I ¿ac=EX
ob¿ I ac=EZ
(2. 91)
donde:
I ac= corriente de corto circuito simétrica
E=voltaje de Thévenin o prefallo
X= reactancia equivalente de Thévenin
Z= impedancia equivalente en el punto de Thévenin

42
Dependiendo del tipo de cálculo, las reactancias dinámicas (equipos rotatorios) son
multiplicadas por los factores indicados en la Tabla 2.3. Para el cálculo de la corriente de
cortocircuito simétrica, se deben despreciar las resistencias, las cargas estáticas y las corrientes
de carga.
Tabla 2.1. Factores de multiplicación recomendados por las normas ANSI/IEEE para la corrección de las impedancias de las fuentes de cortocircuito[Davis, 2006].
Tipo de Máquina
Reactancia de secuencia positiva para calcular
Capacidad de Interrupción
Capacidad Momentánea
TurbogeneradoresHidrogeneradores con devanadoAmortiguadorCondensador sincrónico
1.0 Xd’’ 1.0 Xd’’
Hidrogeneradores sin devanadoAmortiguador
0.75 Xd’ 0.75 Xd’
Motores sincrónicos 1.5 Xd’’ 1.0 Xd’’Motores de inducción Mayor a 1000 HP a 1800 rpm o menor Mayor a 250 HP a 3600 rpm
1.5 Xd’’ 1.0 Xd’’
De 50 HP a 1000 HP a 1800 rpm De 50 HP a 3600 rpm 3.0 Xd’’ 1.2 Xd’’ Menor de 50 HP deben ser despreciados --- ---
La ecuación 2.91 implica el cálculo de la reactancia o de la impedancia de Thévenin en el
punto de fallo. En el caso de la impedancia de Thévenin esta puede ser determinada a partir
de:
a) Reducción de una red compleja de impedancias, dando lugar al método complejo E/Z.
b) Calculo de R y X en el punto de fallo a partir de redes separadas, dando lugar al método
E/X.
En cualquier caso, la relación X/R es calculada a partir de redes resistivas y reactivas
independientes. La relación así calculada es utilizada en la obtención de los factores de
multiplicación de la corriente de interrupción y también para el cálculo de factores de
asimetría de la corriente instantánea.

43
El cálculo de la relación E/Z corriente a partir de redes separadas es conservador y permite
obtener resultados lo suficientemente precisos. La magnitud y ángulo de las corrientes de rama
presentan diferencias importantes al ser comparadas a las obtenidas en la red compleja en
términos de Z. Las contribuciones de las barras adyacentes no presentan buenas correlaciones.
Sin embargo, este procedimiento representa un algoritmo de cálculo mucho más simple.
El cálculo de cortocircuito a partir de la red reactiva, es decir, de E/X produce resultados
conservadores, y cuando la relación X/R en el punto de fallo es alta, los resultados entre E/X y
E/Z podrían ser muy similares. Esto, sin embargo, podría no ser siempre cierto. Para sistemas
de bajo voltaje resulta conveniente realizar el cálculo de cortocircuito a partir de E/Z cuando la
relación X/Res baja, ya que la diferencia obtenida en los resultados entre E/X y E/Z podría ser
importante. Generalmente, la industria ha adoptado como un estándar el cálculo E/Z utilizando
el método complejo.
La corriente simétrica de cortocircuito ajustada, calculada por medio del procedimiento
antes descrito, es comparada con la capacidad simétrica de interrupción del IP, si:
I. SI LA RELACIÓN X/R ≤ 15.
Se obtiene aproximadamente, de la Figura 2.15, un valor igual a uno (1,0) para el factor de
multiplicación, Fm'
, de tal manera que:
I a. c .' =I a. c .×1 .0=I a . c . (2. 92)
II. SI LA RELACIÓN X/RES DESCONOCIDA.
En este caso se selecciona para el factor de multiplicación el mayor valor, el cual de
acuerdo a las figuras antes referidas tiene un valor aproximado de 1.25, en este caso la
corriente simétrica ajustada es igual a1 .25⋅I a. c . , es decir:
(2. 93)
44
III. SI LA RELACIÓNX/R ≥ 15.
Ajustes por los decrementos AC y DC deben ser aplicados al valor rms de la componente
simétrica de la corriente de corto circuito, de acuerdo si el cortocircuito es alimentado por una
fuente local o remota.
2.8.2FALLOS ALIMENTADOS DESDE FUENTES REMOTAS
Representa el caso cuando el corto circuito es alimentado desde un generador a través de dos o
más etapas de transformación, o por una reactancia externa en por unidad al generador, la cual
es igual o mayor a 1.5 veces la reactancia subtransitoria en por unidad expresadas en una base
común. Esto significa que si la fuente suministra menos del 40% de su corriente de corto
circuito terminal, esta es considerada una fuente remota. En este caso, el efecto del
decremento AC no requiere ser considerado y en consecuencia los factores de multiplicación
solamente incluyen el efecto del decremento DC y son obtenidos a partir de las curvas dadas
en la Figura 2.15. El factor de multiplicación para fuentes remotas puede ser calculado, a partir
de la ecuación siguiente:
F m'=[ 1/S ] [1+2 e−4 C /(
XR
) ]1 /2(2. 94)
C representa el tiempo de separación de contactos a 60 Hz.
45
Figura 2.15. Factores de Multiplicación para aplicación de fallos trifásicos y de línea a tierra. Incluyen el decremento de la componente DC[Das, 2002].
2.8.3FALLOS ALIMENTADOS DESDE FUENTES LOCALES
En este caso el efecto de los decrementos AC y DC deben ser considerados. La fuente de
corto circuito es denominada local cuando la corriente de corto circuito es predominantemente
alimentada a través de no más de una etapa de transformación o cuando la reactancia externa
por unidad al generador es menor a 1,5 veces la reactancia interna en por unidad de la fuente,
expresadas en la misma base de potencia; lo cual significa que esta podrá suministrar más del
40% de su máxima corriente terminal de cortocircuito. Los factores de multiplicación son
obtenidos a partir de las curvas presentadas en las Figuras 2.16 y 2.17. Para los factores de
multiplicación locales no existe una ecuación conocida.
Un número determinado de fuentes podrían contribuir al fallo a través de diferentes
impedancias. Cada una de esas contribuciones tiene diferentes velocidades de decaimiento. La
impedancia a través de la cual el fallo es alimentado determina si la fuente es considerada
local o remota. El decaimiento AC de fuentes eléctricamente remotas es menor al ser

46
comparadas con fuentes locales o cercanas. La constante de tiempo asociada con el
decaimiento AC es función de la resistencia del rotor.
Figura 2.16.Factores de multiplicación para aplicación de fallos trifásicos. Incluyen el decremento de la componente AC y DC[Das, 2002].
Figura 2.17.Factores de multiplicación para aplicación de fallos de línea a tierra. Incluyen el decremento de la componente AC y DC[Das, 2002].
A continuación se explica el procedimiento para obtener las curvas de los factores de
multiplicación que aplican a las fuentes locales. La Figura 2.18 muestra la relación de la
corriente de fallo NACD (Isim/Iasim).El subíndice NACD significa que no considera
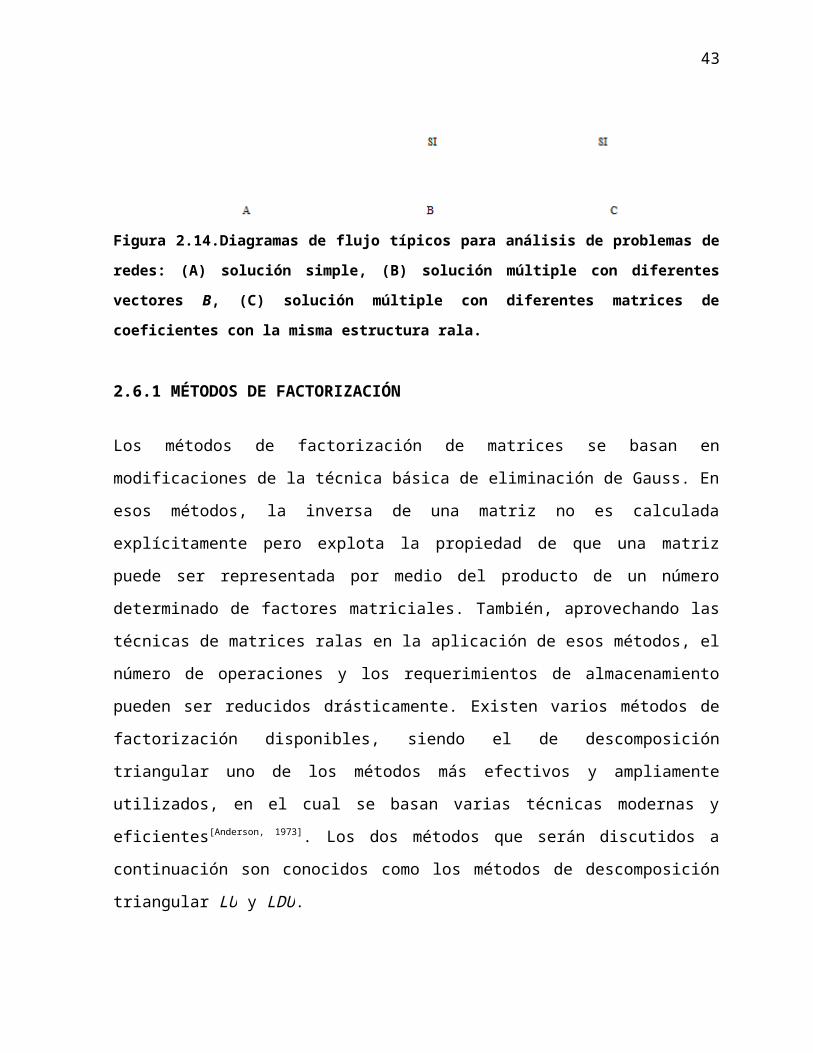
47
decremento AC), como una función de la razón X/R para varios tiempos de separación de
contactos. Las curvas de esta figura son modificadas de tal manera que el decremento de la
componente simétrica de la corriente de fallo es tomado en consideración. La Figura 2.19(a)
muestra la relación general entre la razón X/R y el decremento AC en función de la
localización del punto de fallo respecto a la fuente de generación. Esta relación empírica es
presentada como una banda, basada en pequeñas y grandes máquinas de varios fabricantes. La
Figura 2.19(b) muestra el decaimiento de la componente simétrica (componente AC) para
varios instantes de tiempo después de iniciado el fallo, como una función del tiempo de
separación de contactos y el tipo de fallo. La Figura 2.19(c) permite obtener el factor de
reducción que puede ser aplicado a NACD (Isim/Iasim) para reflejar el efecto del decremento
AC. El factor de reducción, también, puede ser obtenido a partir de la siguiente expresión:
Factor de Reducción=FR=
√Iac2+ Idc2
( E/ X )
[ IasimIsim ]
NACD
(2. 95)
Figura 2.18.(IAsym/ISym)nacdvs. X/R para diferentes tiempos de separación de contactos[Das, 2002].
48
Figura 2.19.a) Decremento AC para fallos remotos respecto a la fuente de corto circuito; b) Factores de ajuste para decremento AC en función de X/R y el punto de localización del fallo, para diferentes tiempos de apertura de contactos y tipos de fallo; c) Factores de ajuste por decremento AC[Das, 2002].
2.8.4 FACTORES DE MULTIPLICACIÓN PONDERADOS
En general, en un sistema de potencia las diferentes fuentes de cortocircuito pueden ser
clasificadas en remotas o locales, dependiendo de las impedancias interconectadas entre dichas
fuentes y los puntos de fallo. En consecuencia, no se deben aplicar exclusivamente factores de
multiplicación remotos o locales. Estos factores deben ser ponderados o penalizados. La
penalización consiste en aplicar factores de multiplicación remotos a la parte de la corriente
simétrica de cortocircuito, (E/X) debida a contribuciones de fuentes remotas. Similarmente,
factores de multiplicación locales deben ser aplicados a la componente local de la corriente de
cortocircuito. La fracción de la corriente simétrica de cortocircuito, a ser interrumpida por el
IP, debida a la contribución de fuentes remotas es identificada por la razón NACDR, y es
definida por:

49
NACDR=∑ Corrientesde fuentesremotas
Corriente simétricade corto circuito(2. 96)
La Figura 2.20 se deriva de la aplicación de la ecuación anterior, donde el NACD es
conocido como el radio de contribución de generación remota a la corriente de falla. El nuevo
factor de multiplicación F interpolación puede ser obtenido por la interpolación entre F ACDC y FDC
usando la ecuación siguiente: ¡!!!No me gusta esto, revise bien la bibliografía ¡!!!!!
F interpolación=F ACDC+NACD∗(F DC−FACDC) (2. 97)
dondeFDC, y F ACDCprovienen de las Figuras 2.15, 2.16 y 2.17.
En la Figura 2.20 se dan curvas donde se pueden obtener factores de multiplicación para
diferentes valores de NACDR, para los fallos trifásicos. Y, en la figura 2.21 se observa los
factores de multiplicación para los fallos de línea a tierra que son, junto a los fallos trifásicos,
los que producen mayores corrientes en los sistemas de potencia. Esta figura se halla con la
utilización de la ecuación 2.86.
50
Figura 2.20.Factores de multiplicación para X/E, fallos trifásicos, diferentes NACDR y tiempos de interrupción[Das, 2002].
Figura 2.21.Factores de multiplicación para X/E, fallos monofásicos, diferentes NACDR y tiempos de interrupción.
CAPÍTULO 3IMPLEMENTACIÓN DE LA HERRAMIENTA
COMPUTACIONAL
En este capítulo se presenta la metodología empleada en el desarrollo e implementación del
diseño de la herramienta computacional.
3.1GENERALIDADES
FORTRAN fue el lenguaje utilizado para la realización de este programa, el cual posee una
interfaz gráfica en MS-DOS. El mismo puede hacer cálculos de cortocircuitos monofásicos,
bifásicos y bifásicos a tierra, en un sistema de potencia basándose en las técnicas de matrices
ralas (Sparsity) y en la inversa de la matriz de admitancia de barras. Esta herramienta
computacional es capaz de calcular la corriente total de cortocircuito, la corriente de secuencia
y de fase, la corriente que circula en las ramas dependiendo de la secuencia. En cuanto a
valores de voltaje, puede calcular los voltajes prefallo y postfallo de las barras y los voltajes de
fase de las mismas.
3.2OPCIONES DE ENTRADA
Las tres opciones de entrada del programa son crear un archivo, corregir un archivo existente y
estudio de cortocircuito de un sistema existente.

52
Figura 3.1.Diagrama general del desarrollo del software.
3.2.1 CREAR UN ARCHIVO
Al seleccionar esta opción debe indicarse el nombre del archivo que posteriormente se
estudiará, y se debe proporcionar los datos de todo el sistema de potencia.
Datos base: constituye los valores base del sistema, como lo son la potencia nominal y el
número de barras.
A
Opciones de cálculo: Estudio de cortocircuito
calculando voltajes de prefallo. Estudio de cortocircuito
utilizando voltajes de prefallo igual a 1 p.u.
Registrar datos
de líneas
Registrar datos
de barras
Registrar datos
generales Opciones: Fallo trifásico Fallo línea-tierra Fallo línea-línea Fallo línea-línea-tierra
Corregir un archivo Estudio de cortocircuitoCrear un archivo
Inicio
53
Datos de barras: conformados por los elementos que están conectados entre alguna barra y
tierra. Estos elementos son: sistemas remotos, generadores sincrónicos, cargas estáticas,
motores sincrónicos, motores de inducción. A su vez a cada elemento del sistema se le
debe introducir los datos propios que el programa demanda.
Datos de líneas: son los elementos que están entre barras, los cuales son transformadores,
y líneas de transmisión. Al igual que en los datos de barra, se debe complementar la
información de cada elemento.
3.2.2 CORREGIR UN ARCHIVO
Esta parte del programa consiste en seleccionar algún archivo existente para poder realizar
cambios a los datos.
Al seleccionar esta opción se debe introducir el nombre del archivo que se desea corregir,
luego se procede a escoger la opción de mostrar datos del sistema, para así cerciorarse del dato
a cambiar.
Posteriormente se opta por la opción 2 (corregir datos), la cual lleva al tipo de dato que se
desea trabajar. Luego se selecciona la barra o línea se desea cambiar dependiendo del caso, y
finalmente se realizan las correcciones.
3.2.3ESTUDIO DE CORTOCIRCUITO DEL SISTEMA
Esta opción permite seleccionar el tipo de fallo que se desea estudiar, se encuentran los fallos
trifásicos, línea-tierra, línea-línea, doble línea-tierra.
Al elegir el tipo de fallo, el programa redirige a las opciones en cuanto al voltaje de
prefallo. Luego se procede a ingresar el nombre del archivo a estudiar, y posteriormente
comienza la etapa de lectura y procesamiento de datos, la cual genera los vectores necesarios
para realizar las subrutinas detécnicas de matrices ralas (Sparsity) y para los cálculos.
54
Seguidamente viene la etapa de aplicación de las técnicas de matrices ralas, y por último los
cálculos para la obtención de voltajes y corrientes.
Figura 3.2.Diagrama subrutinas.
3.2.3.1 Subrutina LEER1: En esta parte del programa se lee, procesa y almacena los
datos base del sistema de potencia. Estos datos quedan registrados y pueden ser utilizados a lo
largo del programa. Se maneja SBASE, que es la potencia base del sistema, y NK, que es el
número de nodos del sistema.
3.2.3.2Subrutina LEER2: Esta subrutina lee los datos de barra, convirtiendo en por
unidad todos los datos necesarios. Se forma un vector de ubicación de barras llamado BUS1,
el cual almacena los datos anteriores. Genera las admitancias de cada elemento de barra y las
asocia a la correspondiente, al hacer o anteriormente dicho se crean vectores de componentes
del vector admitancia, para la parte real e imaginaria de la secuencia positiva, negativa y cero.
Los vectores manejados en esta subrutina son:
C
C
B
B
A
ESCRIBIR3
ESCRIBIR2
ESCRIBIR1LEER4
Subrutinas de
Sparsity
LEER3LEER2
LEER1
Nombre del
archivo
55
- BUS1 (I): vector de ubicación de barras.
- PCER (I): componente real del vector admitancia de barra de secuencia positiva.
- PCEI (I): componente imaginaria del vector admitancia de barra de secuencia positiva.
- QCER (I): componente real del vector admitancia de barra de secuencia negativa.
- QCEI (I): componente imaginaria del vector admitancia de barra de secuencia negativa.
- ZCER (I): componente real del vector admitancia de barra de secuencia cero.
- ZCEI (I): componente imaginaria del vector admitancia de barra de secuencia cero.
- VR (I): componente real del vector voltaje.
- VI (I): componente imaginaria del vector voltaje.
Para el cálculo de vectores de barra a tierra, en forma desacoplada, se usan las siguientes
ecuaciones:
- VPP=Vope/VBASE
- Z=R1*R1+X1*X1
- Z2=R2*R2+X2*X2
- Z0=R0*R0+X0*X0
- PCER(I)=PCER(I)+R1/Z
- PCEI(I)=PCEI(I)-X1/Z
- QCER(I)=QCER(I)+R2/Z2
- QCEI(I)=QCEI(I)-X2/Z2
- ZCER(I)=ZCER(I)+R0/Z0
- ZCEI(I)=ZCEI(I)-X0/Z0
- V=VR(I)*VR(I)+VI(I)*VI(I)
3.3.3.3 Subrutina LEER3: Esta subrutina lee, procesa y almacena los datos de rama, es
decir los datos de líneas de transmisión y de transformadores, los cuales conectan las barras
entre sí. Este proceso genera dos vectores de ubicación de las barras a la cual está conectada,
que son BUS1 y BUS2.Se calcula las admitancias de rama almacenándolas en los vectores
PBYR, PBYI, QBYR, QBYI, ZBYR y ZBYI, dependiendo de la secuencia, y a medida que va
estudiando el sistema se va adicionando las cargas correspondientes a cada línea.

56
Cabe destacar que cuando existen transformadores en el sistema de potencia a estudiar, los
vectores de almacenamiento de admitancia de barras se ven afectados en algunos casos, ya que
según el tipo y conexión de los transformadores, se generan o no admitancias de barra y/o
rama en la secuencia cero.
Los vectores de esta subrutina son:
- BUS1(I),BUS2(I): vectores de ubicación de las barras a la cual está conectado.
- PBYR(I): componente real del vector admitancia de rama de secuencia positiva.
- PBYI(I): componente imaginaria del vector admitancia de rama de secuencia positiva.
- QBYR(I): componente real del vector admitancia de rama de secuencia negativa.
- QBYI(I): componente imaginaria del vector admitancia de rama de secuencia negativa.
- ZBYR(I): componente real del vector admitancia de rama de secuencia cero.
- ZBYI(I): componente imaginaria del vector admitancia de rama de secuencia cero.
Para el cálculo de vectores entre barras, en forma desacoplada, se usan las siguientes
ecuaciones:
- Z1=R1*R1+X1*X1
- Z2=R2*R2+X2*X2
- Z0=R0*R0+X0*X0
- PBYR(K)=PBYR(K)+ R1/Z1
- PBYI(K)=PBYI(K)+ X1/Z1
- QBYR(K)=QBYR(K)+R2/Z2
- QBYI(K)=QBYI(K)-X2/X2
- ZBYR(K)=ZBYR(K)+R0/Z0
- ZBYI(K)=ZBYI(K)-X0/R0
3.2.3.4Técnicas de matrices ralas (Sparsity): En esta parte el programa desarrolla
cuatro subrutinas, que son las cuatro fases del proceso de las técnicas de matrices ralas
(Sparsity), las cuales son: almacenamiento compacto, ordenamiento óptimo, factorización y la
57
solución numérica. Se hará uso de una matriz demostrativa para la ejemplificación de cada
subrutina.
a) Subrutina ACDM (ALMACENAMIENTO COMPACTO).
Esta subrutina se encarga de almacenar los elementos no nulos capturados por la lectura de
datos de barra y la lectura de datos de rama, LEER2 y LEER3, respectivamente. Con la
información obtenida de la red, localiza los valores diferentes de cero de la matriz y los
almacena compactamente. En la Figura A.1 (ver apéndice A) se desarrolla la programación
utilizada para esta subrutina. Y a continuación se presenta los pasos de esta subrutina:
Se crearan tantas unidades de almacenamiento como elementos no nulos posea la matriz.
Las primeras posiciones corresponden a la diagonal principal de la matriz. El resto del
almacenamiento se realiza recorriendo cada columna, tomando los elementos no nulos y
almacenándolos según la posición en la que se encuentren en la fila.
El vector IL(I), depende del vector BUS1. Y KL(I), depende de BUS2. Estos vectores
formados en las subrutinas anteriores aportaron las posiciones que se utilizarán en esta
etapa de Sparsity. De ahí se obtiene entonces las unidades de almacenamiento.
Seguidamente el vector ITAG, mediante el vector KL(L), relacionado con las columnas,
localiza las posiciones de los elementos de la diagonal principal, ubicándolos en la primeras
unidades de almacenamiento
Luego se producen las listas vinculadas mediante la interacción del vector LNXT (indica la
unidad de almacenamiento del próximo elemento) y el vector LCOL(indica la unidad de
almacenamiento donde está el primer elemento no nulo de la columna), el cual utiliza el
vector IL(L), que maneja las filas.
Posteriormente a la unidad de almacenamiento mostrada por el vector LCOL, se le da el
número de la fila donde está ubicado este elemento mediante el vector ITAG (indica la fila
donde está el elemento no nulo).
Luego el vector LNXT indica en que unidad de almacenamiento se encuentra el siguiente
elemento no nulo de la columna, en esa unidad el vector ITAG revela la fila en la que está
ubicado el elemento no nulo, y vuelve al vector LNXT, para seguir recorriendo la columna,
hasta encontrar un cero en este vector, el cual indica el fin de elementos diferentes de cero.

58
Este proceso transcurre por cada columna de la matriz hasta haber almacenado todos los
elementos no nulos.
Inmediatamente entra en juego en vector NSEQ, que es de verdadera importancia en la
subrutina del orden óptimo de eliminación, y por ende en esta etapa de Sparsity este vector
se crea de forma arbitraria.
El siguiente paso es la creación del vector NOZE, el cual indica el número de elementos no
nulos existentes por columna, mediante el vector IL(L).
El vector NOZE es de gran importancia ya que este indica a la próxima subrutina el orden
más óptimo de eliminación.
b) Subrutina OODM (ORDEN ÓPTIMO DE ELIMINACIÓN).
En esta etapa de Sparsity, aprovechando las características de las matrices ralas de un sistema,
se hace un ordenamiento que simule estas características. Este ordenamiento de eliminación
debe ser óptimo, es decir, no deben generarse más elementos no nulos, al momento de hacer
las simulaciones. Esta subrutina sigue el proceso que se puede observar en la Figura A.2 y se
explica a continuación:
El vector NOZE de la etapa anterior, se utilizará en esta subrutina, ya que indica cual
columna tiene el menor número de elementos nulos.
En esta subrutina se recorre la matriz columna por columna.
Se empieza revisando el vector NOZE, para así conocer por cual columna se puede
comenzar a simular el orden de eliminación, sin que se generen nuevos elementos
diferentes de cero.
Si existe más de una columna con la menor cantidad de elementos no nulos, se analiza cada
columna para seleccionar cual introduce menos nuevos elementos diferentes de cero, y
entonces esa columna es la que se escoge. Si al realizar el proceso de análisis, las dos
columnas arrojan la misma cantidad de elementos no nulos, se selecciona cualquiera de las
dos opciones. Esto se realiza con cada columna de la matriz.
Los valores de los vectores NSEQ Y NOZE se van modificando a medida que se va
simulando el orden de eliminación, y al final del proceso se muestran los nuevos valores
obtenidos para estos dos vectores.
59
El vector ITAG también se ve modificado, ya que si el orden de eliminación óptimo
introduce elementos no nulos, estos se guardan en el vector anteriormente nombrado.
c) Subrutina FDM (FACTORIZACIÓN).
Esta subrutina factoriza la matriz dependiendo del orden óptimo de eliminación hallado en la
etapa anterior. En este proceso se utilizan sólo los elementos no nulos de la matriz. El proceso
de factorización se realiza para la secuencia negativa, positiva y cero, dependiendo del fallo, y
tiene el proceso observado en la Figura A.3, la cual sigue los siguientes pasos:
Para la factorización se utiliza las técnicas de bifactorización de Gauss, y se trabajan los
valores por redes desacopladas.
Se utiliza el vector NSEQ, ya que este indica la columna por la cual debe comenzar la
eliminación.
Se realiza la estructura de la matriz: formando la diagonal principal, mediante la suma de
los valores de barra y rama de cada nodo; y los datos fuera de la diagonal principal,
sumando los valores de rama comunes entre las barras.
Cabe destacar que la matriz formada es simétrica, por lo que al realizar el proceso para
hallar los factores matriciales, sólo almacenará el triángulo superior y la diagonal principal
de la matriz.
Este proceso de factorización almacena los factores matriciales en el vector CE, y mediante
el uso de los vectores IL(L) y KL(L) se halla la posición correspondiente del factor.
d) Subrutina SSEL (SOLUCIÓN NUMÉRICA).
Esta etapa hace el cálculo de los valores de las variables desconocidas, por medio de los
factores matriciales. Se observa el proceso en la Figura A.4 y es el siguiente:
Se consiguen los valores finales en esta subrutina para dar solución a la ecuación expuesta
en el marco teórico: AX=B, utilizando los factores matriciales obtenidos en la subrutina
anterior y los valores de corriente inyectada en el procesamiento de datos.

60
En este caso se implementa un vector denominado SUM(I) que se encarga de obtener los
valores que se van a utilizar para realizar el producto con el vector encargado de procesar el
cálculo de corrientes inyectadas al sistema en la subrutina LEER2.
Luego se realiza la operación de suma entre el vector anterior con el vector CE y se
multiplica por el V(I), obteniéndose así el resultado final del proceso de cálculo de la etapa.
3.2.3.5 Subrutina LEER4: En LEER4 se almacenan los datos de la barra en la cual se
produce el fallo, los cuales posteriormente se utilizan para los cálculos. Estos datos son:
- BARRA: número de la barra donde se presenta el fallo.
- Voltaje de la barra: valor de voltaje base de la barra donde se produce el fallo.
- Valor resistivo: magnitud de la parte resistiva del fallo.
- Valor reactivo: magnitud de la parte reactiva del fallo.
- Número de ciclos: para realizar el estudio del fallo.
A partir de esta subrutina comienzan los cálculos para la obtención de los valores de voltaje
y corriente postfallo, tanto de secuencias como de fases.
3.2.3.6 Subrutina ESCRIT1: Esta subrutina captura la columna de la matriz inversa de
la barra fallada para cada una de las secuencias necesarias según el tipo de fallo. Luego calcula
la corriente de fallo, así como su valor de fase mediante la subrutina MODANG, explicada
posteriormente. También se halla los valores de la corriente en cada una de las fases. A partir
de esto se calcula los voltajes postfallo de secuencia y fase de cada barra existente en el
sistema de potencia en estudio.
Los valores utilizados en esta subrutina son:
- BPR: componente real del valor de corriente de postfallo de secuencia positiva.
- BPI: componente imaginaria del valor de corriente de postfallo de secuencia positiva.
- BQR: componente real del valor de corriente de postfallo de secuencia negativa.
- BQI: componente imaginaria del valor de corriente de postfallo de secuencia negativa.

61
- BZR: componente real del valor de corriente de postfallo de secuencia cero.
- BZI: componente imaginaria del valor de corriente de postfallo de secuencia cero.
- PVR(K): componente real del valor de variación de voltaje de secuencia positiva.
- PVI(K): valor de variación de voltaje componente imaginario de secuencia positiva.
- QVR(K): componente real del valor de variación de voltaje de secuencia negativa.
- QVI(K): valor de variación de voltaje componente imaginario de secuencia negativa.
- ZVR(K): componente real del valor de variación de voltaje de secuencia cero.
- ZVI(K): valor de variación de voltaje componente imaginario de secuencia cero.
- CRR(K): componente real del valor de corriente de la fase roja.
- CRI(K): componente imaginaria del valor de corriente de la fase roja.
- CYR(K): componente real del valor de corriente de la fase amarilla.
- CYI(K): componente imaginaria del valor de corriente de de la fase amarilla.
- CBR(K): componente real del valor de corriente de la fase azul.
- CBI(K): componente imaginaria del valor de corriente de la fase azul.
- VPR(K): componente real del valor de voltaje de postfallo de secuencia positiva.
- VPI(K): componente imaginaria del valor de voltaje de postfallo de secuencia
positiva.
- VQR(K): componente real del valor de voltaje de postfallo de secuencia negativa.
- VQI(K): componente imaginaria del valor de voltaje de postfallo de secuencia negativa.
- VZR(K): componente real del valor de voltaje de postfallo de secuencia cero.
- VZI(K): componente imaginaria del valor de voltaje de postfallo de secuencia cero.
- VTR(K): componente real del valor de voltaje de postfallo.
- VTI(K): componente imaginaria del valor de voltaje de postfallo.
- VYR(K): componente real del valor de voltaje de postfallo de la fase amarilla.
- VYI(K): componente imaginaria del valor de voltaje de postfallo de la fase amarilla.
- VBR(K): componente real del valor de voltaje de postfallo de la fase azul.
- VBI(K): componente imaginaria del valor de voltaje de postfallo de la fase azul.
Para el cálculo de los vectores correspondientes a esta subrutina, en forma desacoplada, se
usan las siguientes ecuaciones:
- Z=ZR*ZR+ZI*ZI
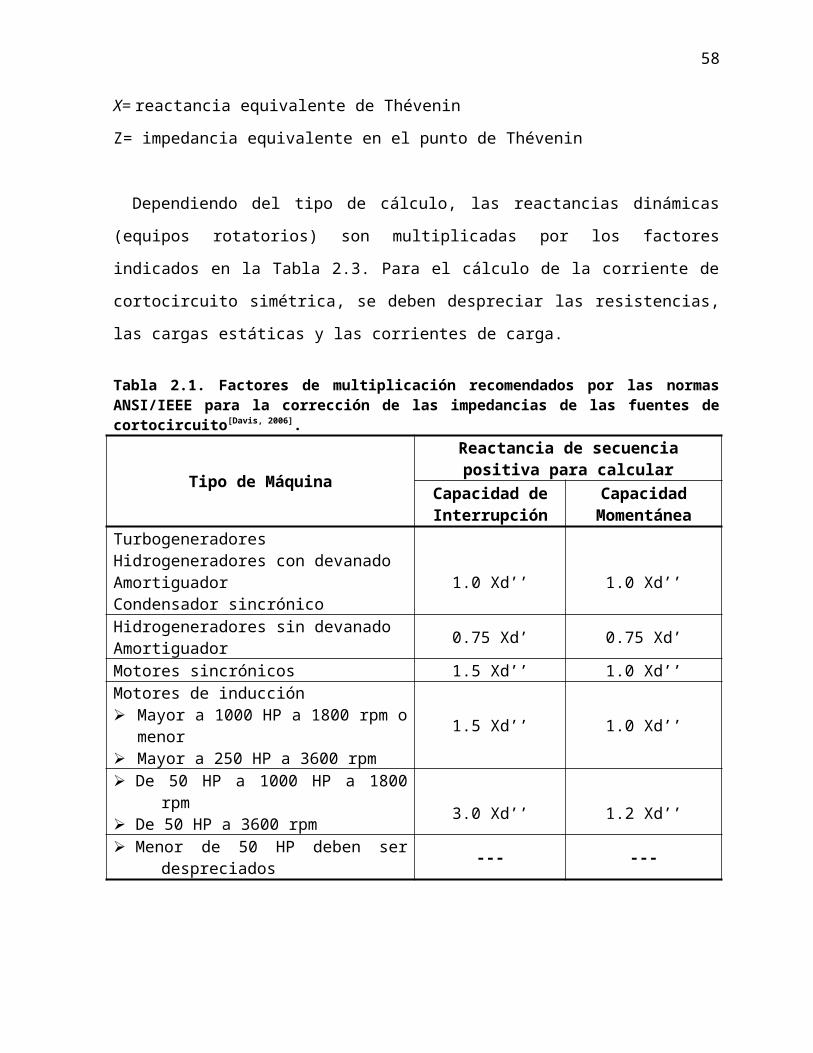
62
- Z2=ZR2*ZR2+ZI2*ZI2
- Z0=ZR0*ZR0+ZI0*ZI0
- BPR=(VR(NF)*ZR+VI(NF)*ZI)/Z
- BPI=(VI(NF)*ZR-VR(NF)*ZI)/Z
- BQR=(VR(NF)*ZR+VI(NF)*ZI)/Z2
- BQI=(VI(NF)*ZR-VR(NF)*ZI)/Z2
- BZR=(VR(NF)*ZR+VI(NF)*ZI)/Z0
- BZI=(VI(NF)*ZR-VR(NF)*ZI)/Z0
- PVR(K)=-PVR(K)*BPR+PVI(K)*BPI
- PVI(K)=-PVR(K)*BPI-PVI(K)*BPR
- QVR(K)=-QVR(K)*BQR+QVI(K)*BQI
- QVI(K)=-QVR(K)*BQI-QVI(K)*BQR
- ZVR(K)=-ZVR(K)*BZR+ZVI(K)*BZI
- ZVI(K)=-ZVR(K)*BZI-ZVI(K)*BZR
- CRR=BZR+BQR+BPR
- CRI=BZI+BQI+BPI
- CYR=BZR-0.5*(BPR+BQR)+0.866025*(BPI-BQI)
- CYI=BZI-0.5*(BPI+BQI)+0.866025*(BQR-BPR)
- CBR=BZR-0.5*(BPR+BQR)-0.866025*(BPI-BQI)
- CBI=BZI-0.5*(BPI+BQI)-0.866025*(BQR-BPR)
- VPR(K)=VR(K)+PVR(K)
- VPI(K)=VI(K)+PVI(K)
- VQR(K)=QVR(K)
- VQI(K)= QVI(K)
- VZR(K)= ZVR(K)
- VZI(K)= ZVI(K)
- VTR(K)=VPR(K)+VQR(K)+VZR(K)
- VTI(K)=VPI(K)+VQI(K)+VZI(K)
- VYR(K)=VZR(K)-0.5*(VPR(K)+VQR(K))+0.866025*(VPI(K)-VQI(K))
- VYI(K)=VZI(K)-0.5*(VPI(K)+VQI(K))+0.866025*(VQR(K)-VPR(K))
- VBR(K)=VZR(K)-0.5*(VPR(K)+VQR(K))-0.866025*(VPI(K)-VQI(K))
63
- VBI(K)=VZI(K)-0.5*(VPI(K)+VQI(K))-0.866025*(VQR(K)-VPR(K))
3.2.3.7 Subrutina ESCRIT2: Esta subrutina calcula las corrientes de rama del sistema
de potencia.
Los valores utilizados en esta subrutina son:
- CPR(K): componente real del valor de corriente de ramas de postfallo de secuencia
positiva.
- CPI(K): componente imaginaria del valor de corriente de ramas de postfallo de secuencia
positiva.
- CQR(K): componente real del valor de corriente de ramas de postfallo de secuencia
negativa.
- CQI(K): componente imaginaria del valor de corriente de ramas de postfallo de secuencia
negativa.
- CZR(K): componente real del valor de corriente de ramas de postfallo de secuencia cero.
- CZI(K): componente imaginaria del valor de corriente de ramas de postfallo de secuencia
cero.
Para el cálculo de los vectores correspondientes a esta subrutina, en forma desacoplada, se
usan las siguientes ecuaciones:
- CPR(K)=PBYR(K)*VPR(K)-PBYI(K)*VPI(K)
- CPI(K)=PBYR(K)*VPI(K)+PBYI(K)*VPR(K)
- CQR(K)=QBYR(K)*VQR(K)-QBYI(K)*VQI(K)
- CQI(K)=QBYR(K)*VQI(K)+QBYI(K)*VQR(K)
- CZR(K)=ZBYR(K)*VZR(K)-ZBYI(K)*VZI(K)
- CZI(K)=ZBYR(K)*VZI(K)+ZBYI(K)*VZR(K)
64
3.2.3.8 Subrutina ESCRIT3: Esta etapa se emplea para los fallos trifásicos y
monofásicos, por lo expuesto en el marco teórico, la misma detecta si los aportes dentro del
sistema de potencia proceden de una fuente remota o local, a partir de la relación de
capacidad corriente de cortocircuito de cada sistema de generación y el aporte de cada una de
ellas a la corriente total de fallo. Teniendo estos resultados se puede obtener el factor NACD
que posteriormente es evaluado en las ecuaciones que determinan el comportamiento de las
curvas de los distintos factores de multiplicación utilizados para el cálculo de corriente de
interrupción; de forma similar son obtenidos el factor cresta de la red del primer ciclo y el
factor para el cálculo de la corriente rms asimétrica del primer ciclo. Finalmente son arrojados
los distintos valores calculados para condiciones momentáneas y de interrupción pudiéndose
observar por pantalla los resultados para el fallo indicado.
Los valores utilizados en esta subrutina son:
- CPR, CPI, CQR, CQI, CZR, CZI. Explicados anteriormente.
- ZZR(K): vector utilizado para determinar fuentes remotas y locales.
- FM: factores de multiplicación a partir de NACD.
- FC: factor cresta.
- FMC: factor capacidad momentánea de interrupción
- TE: relación X/R en el punto de fallo.
Para el cálculo de los vectores correspondientes a esta subrutina, en forma desacoplada, se
usan las siguientes ecuaciones:
- CPR(K)=PBYR(K)*VPR(K)-PBYI(K)*VPI(K)
- CPI(K)=PBYR(K)*VPI(K)+PBYI(K)*VPR(K)
- CQR(K)=QBYR(K)*VQR(K)-QBYI(K)*VQI(K)
- CQI(K)=QBYR(K)*VQI(K)+QBYI(K)*VQR(K)
- CZR(K)=ZBYR(K)*VZR(K)-ZBYI(K)*VZI(K)
- CZI(K)=ZBYR(K)*VZI(K)+ZBYI(K)*VZR(K)
65
3.2.3.9 Subrutina MODANG: Esta parte del programa convierte los valores reales e
imaginarios que se indiquen por el módulo y por ángulo, respectivamente.
Los valores utilizados en esta subrutina, explicados anteriormente son:
- AA: módulo del número.
- ANG: conversión a forma polar.
Para el cálculo del vector correspondiente a esta subrutina, en forma desacoplada, se usa la
siguiente ecuación:
- ANG=57.3*ATAN(B/A)
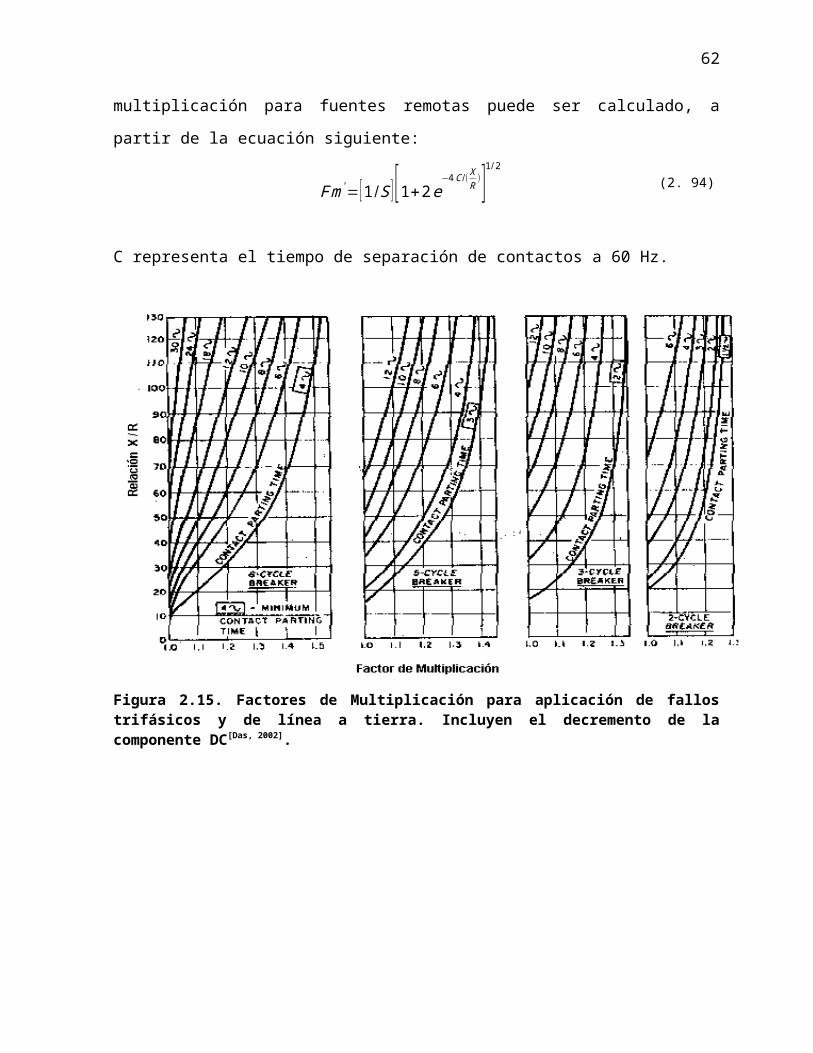
CAPÍTULO 4CASOS DE ESTUDIO
En este capítulo se presentan los resultados logrados con el programa diseñado en ejemplos de
sistemas de potencia, mostrándose los valores de corriente de cortocircuito en el punto de
fallo, las corrientes de rama y los voltajes; de igual manera se muestran los resultados
obtenidos al aplicar las técnicas de matrices ralas (Sparsity).
Para verificar los resultados obtenidos por el programa implementado, se realizó una serie de
ejemplos, obtenidos de las referencia bibliográfica [Anderson, 1973] y [Arrilaga, 1990], estos
ejemplos se realizaron también en el programa NEPLAN, para diferentes tipos de fallos y se
validaron los resultados.
Los ejercicios se estudian para fallos en puntos específicos implementando la norma
ANSI/IEEE 37.010, para los fallos trifásicos y monofásicos. Mientras que sin la aplicación de
la norma se le hace el estudio tanto a los fallos nombrados anteriormente, como a los fallos
bifásicos y bifásicos con tierra.
4.1 EJEMPLO 1
Este sistema de potencia, consta de 3 barras, y se puede encontrar en la referencia
bibliográfica [Anderson, 1973], consta de cargas estáticas, generadores y líneas de
transmisión. La configuración del sistema es la mostrada en la figura No. 4.1. Y el fallo es en
la barra 1.
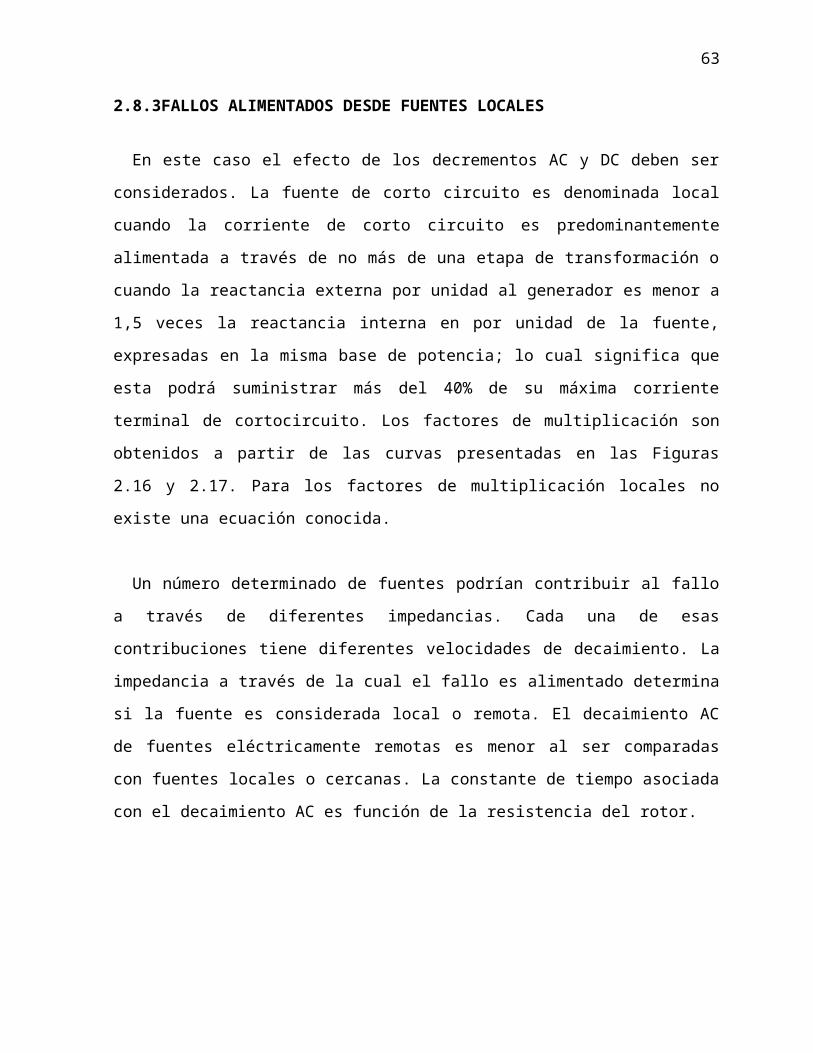
67
Figura 4.1.Diagrama de sistema de potencia (NEPLAN).
Datos del sistema:
Sbase= 100 MVA
Vbase = 13.8 kV
Generadores
Tabla 4.1.Datos generadores (ejemplo 1).
NombrePotencia (MVA)
Voltaje (kV)
Cos Ɵ X1 (%) X2 (%) X0 (%)
G1 100 13.8 0,85 20 20 2G2 100 13.8 0,85 16 16 2
Cargas estáticas
Tabla 4.2.Datos cargas estáticas (ejemplo 1).
Nombre TipoP
(MW)Q
(MVAR)
C1 PQ 50 20C2 PQ 80 40
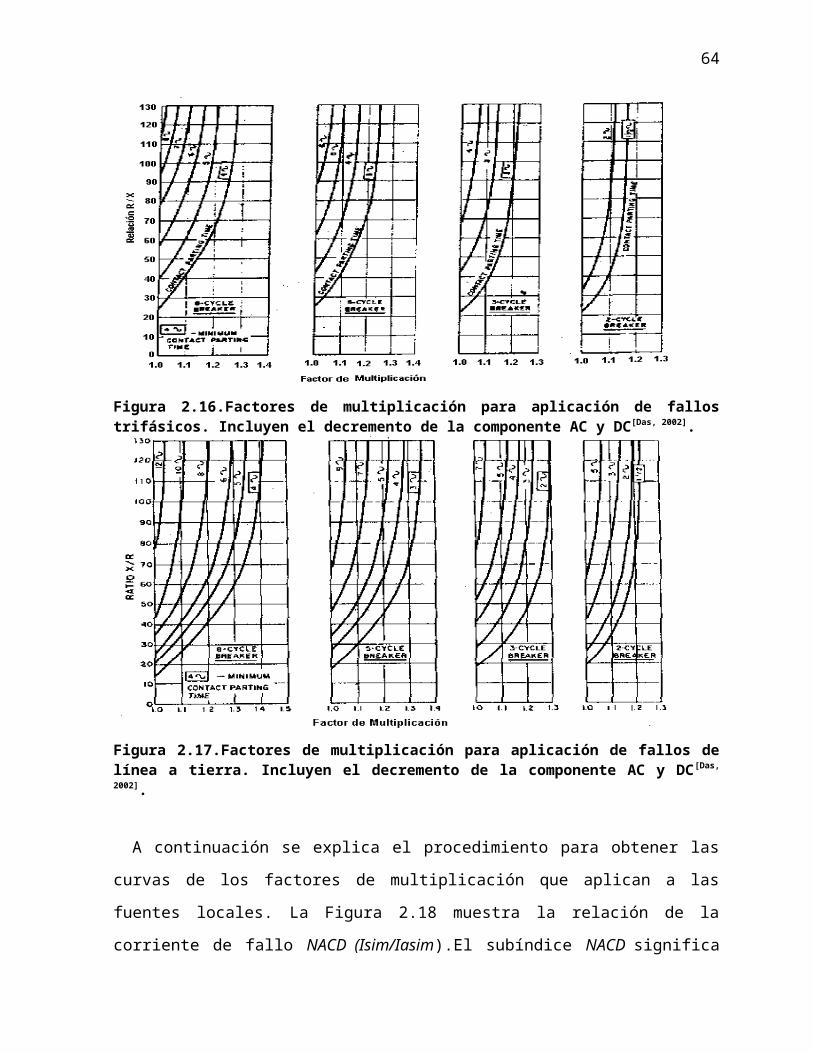
68
Líneas de transmisión
Tabla 4.3.Datos líneas de transmisión (ejemplo 1).
NombreR1
(Ω/km)X1
(Ω/km)Long (km) B1
R0
(Ω/km)X0
(Ω/km)B0
L 1-2 0 0.152352 1 6.564 0 0.266616 3.751L 2-3-1 0 0.114264 1 8.751 0 0.228528 4.376L 2-3-2 0 0.114264 1 8.751 0 0.19044 5.251L 1-3 0 0.247572 1 4.039 0 0.323748 3.088
Resultados ejemplo 1 (5 ciclos).
Tabla 4.4. Comparación de resultados obtenidos a partir del programa diseñado Cortocircuito, Neplan, y referencia bibliográfica, sin aplicar norma, para fallo Trifásico, Línea-Tierra, Línea-
Línea y Línea-Línea- Tierra. Fallo en barra 1. (Ejemplo 1).
Tipo de Fallo
IfalloFASE A
(kA)IfalloFASE B
(kA)IfalloFASE C
(kA)
Programa CC
Trifásico 43.13∠-85.82°43.13∠154.19°
43.13∠34.19°L-T 59.24∠-81.47°
0∠-90° 0∠-90°
L-L 0∠-90° 37.11∠175.81°37.11∠4.19°
L-L-T 0∠180° 64.76∠137.48°57.56∠57.21°
Neplan
Trifásico 43.37∠-88.9°--- ---
L-T 59.62∠-87.45°0∠-90° 0∠-90°
L-L 0∠-90° 37.55∠181.13°37.55∠1.13°
L-L-T 0∠180° 62.907∠132.17°58.26∠55.66°
AndersonTrifásico 42.26∠-90° --- ---
L-T 58.58∠-90° --- ---

69
Tabla 4.5. Comparación de resultados obtenidos a partir del programa diseñado Cortocircuito yNeplan, según Norma ANSI IEEE 37.010. Para fallo Trifásico y Línea-Tierra. Fallo en barra 1. (Ejemplo 1).
PRIMER CICLO INTERRUPCIÓN
Tip
o d
e fa
llo
Imp
edan
cia
(p.u
.)
X/R
I fal
losi
mét
rica
(k
A)
Fac
tor
sim
.(r
ms)
Fac
tor
as
im.
(pic
o)
I fal
loas
imét
rica
(k
A)
Ifal
loas
im.
(kA
pic
o)
Imp
edan
cia
(p.u
)
X/R
Ifal
lo(k
A)
NA
CD
FM
I inte
rru
pci
ón (
kA
)
Programa CC
Trifásico 0.41379-j4.96552
0.01 39.2 1.00 2.73 39.24 107.13 0.00756+j0.10323
0.01 39.2 1.00 1.00 39.24
L-T 0.49172+j0.99310
0.01 55.1 1.00 2.72 55.10 149.87 0.03098+j0.20647
0.01 55.1 1.00 1.00 55.13
NeplanTrifásico --- 0 39.97 --- --- --- 107.92 --- --- --- --- --- 39.97
L-T --- 0 55.44 --- --- --- 149.68 --- --- --- --- --- 55.44

70
4.2 EJEMPLO 2
Este sistema de potencia, consta de 14 barras, y se puede encontrar en la referencia
bibliográfica [Anderson, 1973], consta de cargas estáticas, generadores, transformadores de
dos devanados y líneas de transmisión. La configuración del sistema es la mostrada en la
figura No. 4.2. Y el fallo es en la barra 1.
Figura 4.2.Diagrama de sistema de potencia (NEPLAN).
Datos del sistema:
Sbase= 200 MVA
Vbase = 138 kV
71
Generadores
Tabla 4.6.Datos generadores (ejemplo 2).
NombrePotencia (MVA)
Voltaje (kV)
Cos Ɵ X1 (%) X2 (%) X0 (%)
G1 200 138 0.9 1 1 6G2 200 138 0.9 1 1 7G3 200 138 0.9 10 10 5G4 200 69 0.9 10 10 5G5 200 138 0.9 1 1 5
Cargas estáticas
Tabla 4.7.Datos cargas estáticas (ejemplo 2).
Nombre TipoP
(MW)Q
(MVAR)
C1 PQ 100 50C3 PQ 100 50C5 PQ 100 50C7 PQ 100 50C9 PQ 50 25C10 PQ 50 25C11 PQ 25 20C12 PQ 25 20C13 PQ 50 25C14 PQ 50 25
Transformadores de dos devanados
Tabla 4.8.Datos transformadores de dos devanados (ejemplo 2).
NombrePotencia (MVA)
Voltaje1(kV)
Voltaje2(kV)
Z1 (p.u.) Z0 (%) Conexión
TR1 200 138 69 0.12 0.12 Y-∆TR2 200 138 69 0.12 0.12 Y-∆TR3 200 138 69 0.12 0.12 Y-∆TR4 200 138 69 0.12 0.12 Y-∆
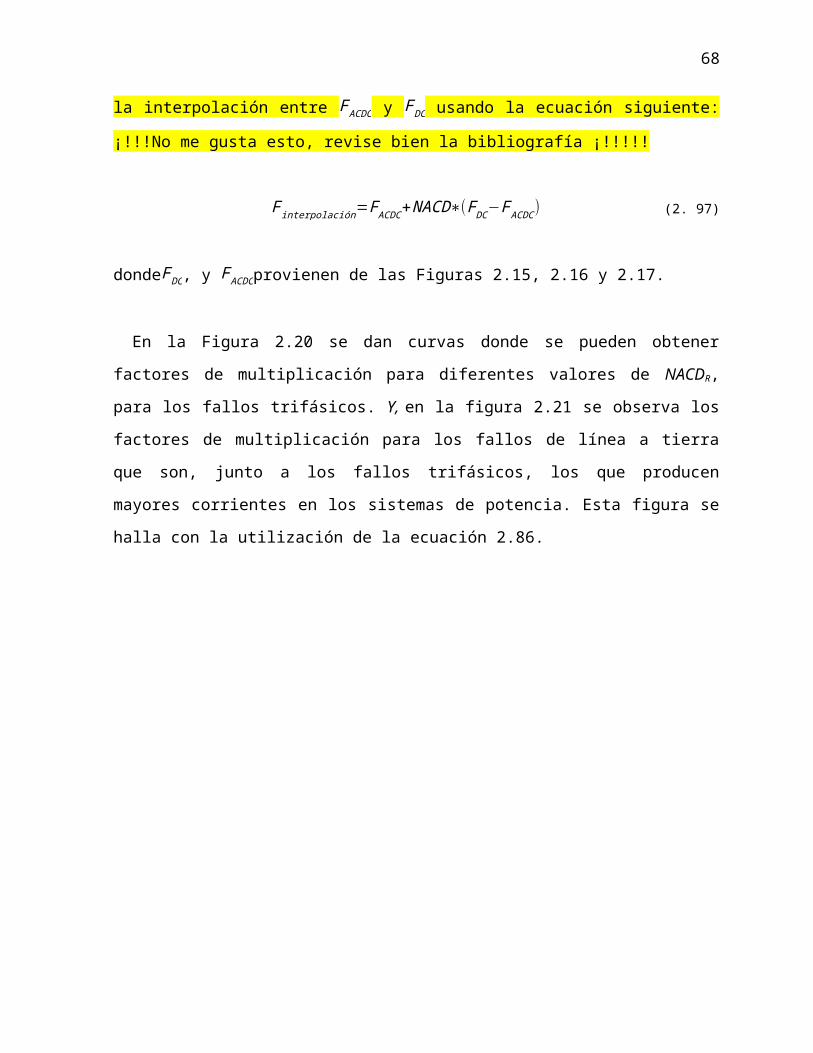
72
Líneas de transmisión
Tabla 4.9.Datos líneas de transmisión (ejemplo 2).
NombreR1
(Ω/km)X1
(Ω/km)Long (km) B1
R0
(Ω/km)X0
(Ω/km)B0
L 1-7 6.38 19.044 1 0.472 12.855 61.893 0.154L 1-9 6.38 19.044 1 0.472 12.759 57.132 0.167L 2-11 8.332 9.998 1 0.59 3.19 14.283 0.667L 3-5 6.38 19.044 1 0.472 16.187 57.132 0.162
L 3-10-1 6.38 19.044 1 0.472 14.283 66.654 0.143L3-10-2 6.38 19.044 1 .0472 14.283 66.654 0.143L 4-12 8.332 9.998 1 0.59 16.664 28.566 0.262
L 5-14-1 6.38 19.044 1 0.472 14.283 61.893 0.153L5-14-2 6.38 19.044 1 0.472 16.664 66.654 0.141L 6-12 8.332 9.998 1 0.59 17.854 28.566 0.252L 7-13 6.38 19.044 1 0.472 14.283 62.369 0.152L 8-11 8.332 9.998 1 0.59 16.664 29.756 0.256L 9-10 3.237 9.52 1 0.942 8.094 33.327 0.283L 13-14 3.237 9.52 1 0.942 7.142 28.566 0.33
Resultados ejemplo 2.
Tabla 4.10. Comparación de resultados obtenidos a partir del programa diseñado Cortocircuito, Neplan, y referencia bibliográfica, sin aplicar norma, para fallo Trifásico, Línea-Tierra, Línea-
Línea y Línea-Línea- Tierra. Fallo en barra 1. (Ejemplo 2).Tipo de
FalloIfalloFASE A
(kA)IfalloFASE B
(kA)IfalloFASE C
(kA)
Programa CC
Trifásico 97.18∠-84.75°97.18∠155.25°
97.18∠35.26°L-T 39.44∠-88.15°
0∠-90° 0∠-90°
L-L 0∠-90° 84.72∠174.75°84.72∠5.25°
L-L-T 0∠-80.59° 84.55∠176.02°85.45∠6.95°
Neplan
Trifásico 97.32∠-86.52°--- ---
L-T 38.66∠-87.93°0∠-90° 0∠-90°
L-L 0∠-90° 84.28∠183.48°84.28∠3.48°
L-L-T 0∠-82.87° 84.77∠175.3 85.51∠11.5
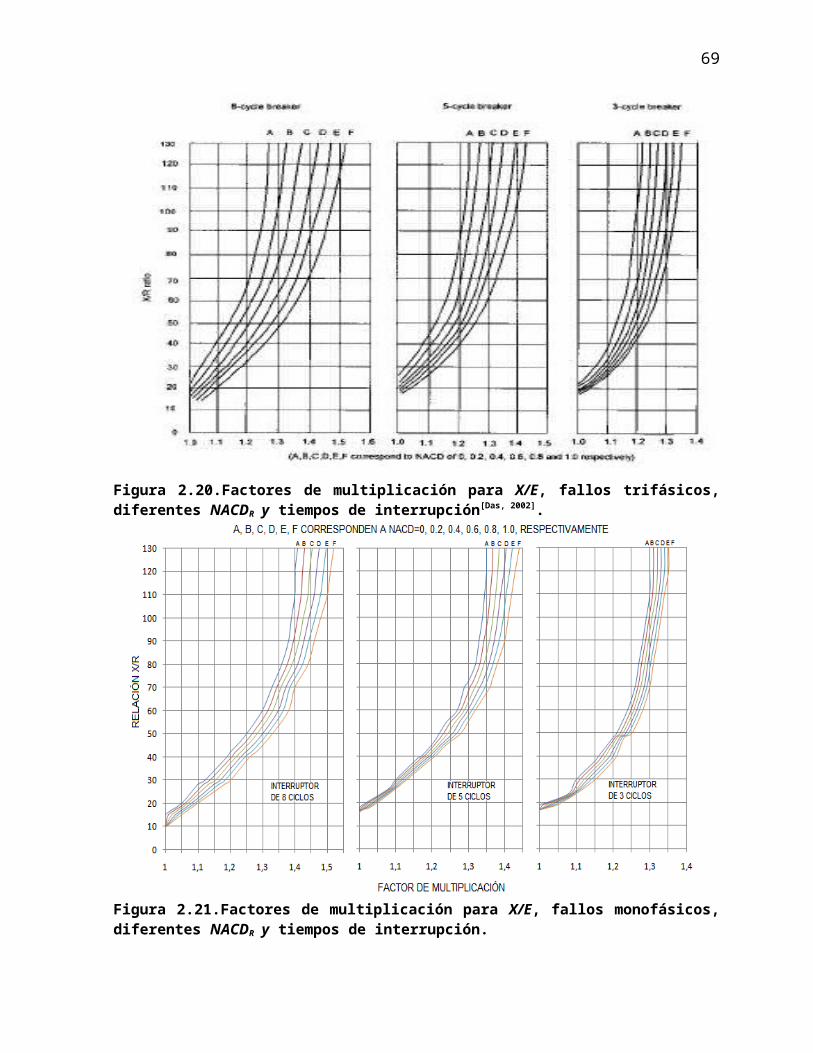
73
1° 9°
AndersonTrifásico 105.90∠-
89.903--- ---
L-T 39.931∠-86.59 --- ---
74
Tabla 4.11. Comparación de resultados obtenidos a partir del programa diseñado Cortocircuito yNeplan, según Norma ANSI IEEE 37.010. Para fallo Trifásico y Línea-Tierra. Fallo en barra 1. (Ejemplo 2).
PRIMER CICLO INTERRUPCIÓN
Tip
o d
e fa
llo
Imp
edan
cia
(p.u
)
X/R
I fal
losi
mét
rica
(k
A)
Fac
tor
sim
.(r
ms)
Fac
tor
as
im.
(pic
o)
I fal
loas
imét
rica
(k
A)
Ifal
loas
im.
(kA
pic
o)
Imp
edan
cia
(p.u
)
X/R
Ifal
lo(k
A)
NA
CD
FM
I inte
rru
pci
ón (
kA
)
Programa CC
Trifásico 0.27586-j99.31035
0.14 88.5 1.65 2.70 145.98 238.87 0.00082+j0.00896
0.14 88.5 1.00 1.00 88.47
L-T 0.11494+j0.09442
0.20 34.9 1.65 2.70 57.62 94.28 0.05467+j0.01792
0.20 34.9 1.00 1.00 34.92
NeplanTrifásico --- 0.16 88.57 --- --- --- 239.14 --- --- --- --- --- 88.57
L-T --- 0.30 35.26 --- --- --- 95.19 --- --- --- --- --- 35.26
75
4.3 EJEMPLO 3
Este sistema de potencia, consta de 19 barras, y se puede encontrar en la referencia
bibliográfica [Arrillaga, 1990], consta de cargas estáticas, generadores y líneas de transmisión.
La configuración del sistema es la mostrada en la figura No. 4.3. Y el fallo es en la barra
Manapouri.
L1
L2
L3
L4
Gen 1
Gen 2
L5
Tekapo-B220 kV
L6
L7L8
L9
L10
Ohau-A220 kV L11
L12
L13 Gen 3
Ohau-C220 kV
Gen 4
Ohau-B220 kV
L14
Gen 5
L15
L16
Waitaky220 kV
Gen 6
L17
L18
Avimore220 kV
Gen 7
L19
L20 L21
Twizel220 kV
L22
Livingstone220 kV
L23
L24
L26G
en
8
L27L28
Roxburgh220 kV
L29
L30
L31
L32
L33
L34Gen 9
Manapouri220 kV
L-347
Bromley220 kV
L-356
Halfway Bush220 kV
L-365
Invercagill220 kV
L-374
Islington220 kVL-385
Kikiwa220 kV
L-400
South Dunedin220 kV
L-348
Stoke220 kV
L-689
Benmore220 kV
L-698
Tiwai220 kV
Figura 4.3.Diagrama de sistema de potencia (NEPLAN).
Datos del sistema:
Sbase= 100 MVA
Vbase = 220 kV
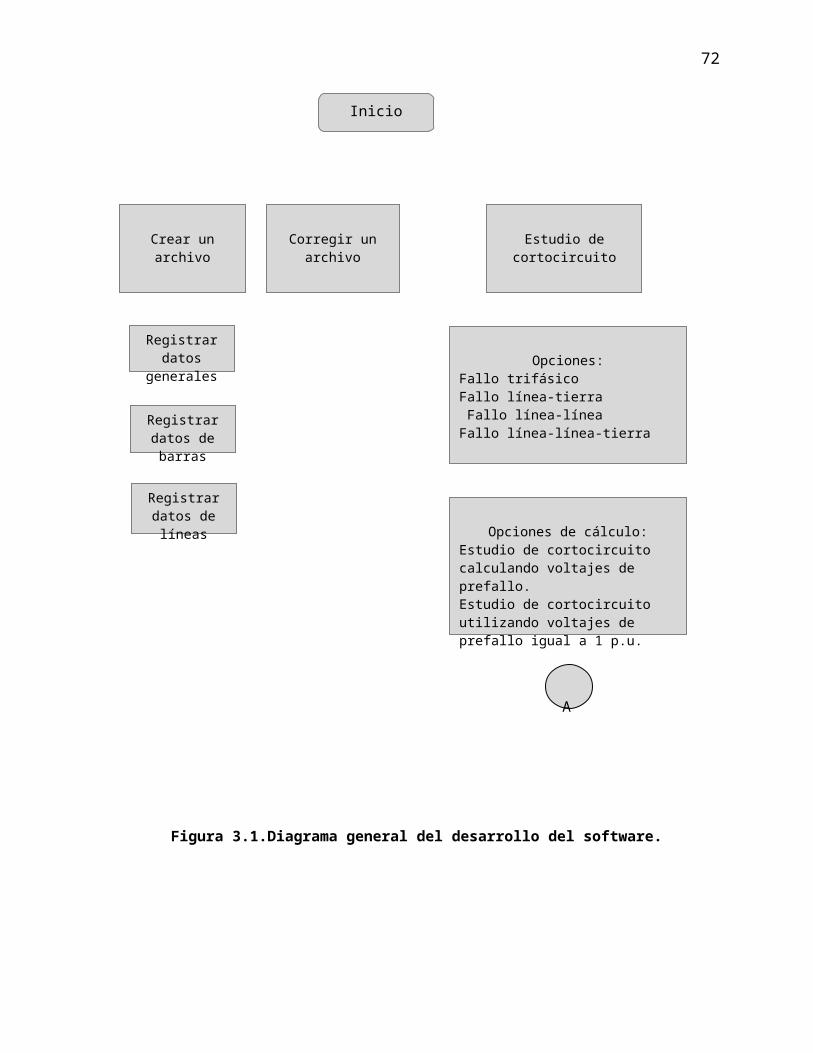
76
Generadores
Tabla 4.12.Datos generadores (ejemplo 3).
NombrePotencia (MVA)
Voltaje (kV)
Cos Ɵ X1 (%) X2 (%) X0 (%)
G1 100 220 0.85 10.6 10.6 2.9G2 100 220 0.85 7.85 7.85 2.901G3 100 220 0.85 8.02 8.02 3.395G4 100 220 0.85 8.02 8.02 3.395G5 100 220 0.85 16.02 16.02 64.2G6 100 220 0.85 8.94 8.94 4.5G7 100 220 0.85 6.59 6.59 2.268G8 100 220 0.85 7.74 7.74 3.19G9 100 220 0.85 3.1 3.1 0.9
Cargas estáticas
Tabla 4.13.Datos cargas estáticas (ejemplo 3).
Nombre TipoP
(MW)Q
(MVAR)
L-385 PQ 59.2 9.2L-348 PQ 53.2 20.3L-374 PQ 504.1 124.3L-347 PQ 129.6 38.3L-689 PQ 597.2 180L-356 PQ 95.3 40.4L-400 PQ 34.2 12.9L-365 PQ 183.2 20L-698 PQ 288 105.72

77
Líneas de transmisión
Tabla 4.14.Datos líneas de transmisión (ejemplo 3).
NombreR1
(Ω/km)X1
(Ω/km)Long (km) B1
R0
(Ω/km)X0
(Ω/km)B0
L1 3.69 21.15 1 0.271 11.48 54.62 0.0871L2 3.69 21.15 1 0.271 11.48 54.62 0.0871L3 16.07 96.05 1 0.0104 50.12 276.21 0.0036L4 10.22 70.55 1 0.0142 43.83 200.85 0.0049L5 1.1132 7.52 1 0.1329 4.39 22.9 0.0436L6 7.89 63.1 1 0.016 41.22 256.34 0.004L7 8.3 77.71 1 0.013 43.33 266.67 0.0037L8 0.98 7.99 1 0.125 5.11 31.46 0.032L9 0.56 3.2 1 0.3125 1.73 9.83 0.102L10 0.56 3.2 1 0.3125 1.73 9.83 0.102L11 0.43 3.18 1 0.314 2.06 10.29 0.097L12 0.12 0.87 1 1.149 0.8 2.81 0.356L13 0.309 2.308 1 0.433 1.49 7.48 0.1337L14 0.74 3.5 1 0.285 1.95 9.89 0.101L15 15.63 85.48 1 0.0116 50.14 267.1 0.0037L16 2.85 13.49 1 0.074 7.52 38.15 0.0262L17 1.57 7.3 1 0.137 4.15 18.23 0.055L18 1.59 7.41 1 0.135 4.21 18.44 0.0542L19 2.07 14.2 1 0.07 8.9 41.64 0.024L20 7.69 66.36 1 0.015 116.2 32.91 0.03L21 7.69 66.36 1 0.015 116.2 32.91 0.03L22 12.82 60.75 1 0.0164 33.89 171.8 0.0058L23 3.72 31.9 1 0.0313 19.19 119.13 0.0084L24 0.847 4.88 1 0.2049 2.64 12.41 0.08L26 4.11 34.17 1 0.029 20.42 124.19 0.008L27 9.1 54.32 1 0.018 28.32 156.44 0.0064L28 9.27 54.46 1 0.0183 28.84 131.57 0.0076L29 1.09 7.05 1 0.1418 4.69 19.69 0.0507L30 1.09 7.05 1 0.1418 4.69 19.69 0.0507L31 6.48 44.42 1 0.0225 27.79 147.18 0.0067L32 6.48 44.42 1 0.0225 27.79 147.18 0.0067L33 7.5 51.95 1 0.019 32.18 172.06 0.0058L34 7.5 51.95 1 0.019 32.18 172.06 0.0058

78
Resultados ejemplo 3.
Tabla 4.15. Comparación de resultados obtenidos a partir del programa diseñado Cortocircuito, Neplan, y referencia bibliográfica, sin aplicar norma, para fallo Trifásico, Línea-Tierra, Línea-
Línea y Línea-Línea- Tierra. Fallo en barra Manapouri. (Ejemplo 3).
Tipo de Fallo
IfalloFASE A
(kA)IfalloFASE B
(kA)IfalloFASE C
(kA)
Programa CC
Trifásico 9.63∠266.81°9.63∠155.20°
9.63∠35.20°L-T 13.18∠266.05°
0∠-90° 0∠-90°
L-L 0∠-90° 8.94∠174.80°8.94∠0.23°
L-L-T 0∠267.03° 11.56∠127.61°11.48∠41.26°
Neplan
Trifásico 9.86∠269.96°--- ---
L-T 13.59∠269.17°0∠-90° 0∠-90°
L-L 0∠-90° 9.17∠179.63°9.17∠-0.37°
L-L-T 0∠268.21° 12.32∠134.28°12.57∠44.29°
ArrillagaTrifásico 9.520 --- ---
L-T 13.233 --- ---

79
Tabla 4.16. Comparación de resultados obtenidos a partir del programa diseñado Cortocircuito y Neplan, según Norma ANSI IEEE 37.010. Para fallo Trifásico y Línea-Tierra. Fallo en barra Manapouri. (Ejemplo 3).
PRIMER CICLO INTERRUPCIÓN
Tip
o d
e fa
llo
Imp
edan
cia
(p.u
)
X/R
I fal
losi
mét
rica
(k
A)
Fac
tor
sim
.(r
ms)
Fac
tor
as
im.
(pic
o)
I fal
loas
imét
rica
(k
A)
Ifal
loas
im.
(kA
pic
o)
Imp
edan
cia
(p.u
)
X/R
Ifal
lo(k
A)
NA
CD
FM
I inte
rru
pci
ón (
kA
)
Programa CC
Trifásico 2.75862-j33.10345
58.81 8.9 1.57 2.68 13.90 23.73 0.00105+j0.01149
59.09 7.6 0.97 1.16 8.85
L-T 0.05542+j0.66207
44.88 13.1 1.51 2.58 19.81 33.87 0.00529+j0.02298
44.93 11.1 0.89 1.08 12.05
NeplanTrifásico --- 59.01 9.16 --- --- --- 24.74 --- --- --- --- --- 9.16
L-T --- 44.98 13.56 --- --- --- 34.33 --- --- --- --- --- 12.71

80
4.4 DISCUSIÓN
Para comparar los resultados conseguidos por medio del programa realizado en FORTRAN:
CORTOCIRCUITO, se utilizó la referencia bibliográfica correspondiente y la herramienta
computacional NEPLAN, ya que éste es altamente reconocido y seguro en cuanto a valores en
sistemas de potencia.
El ejemplo 1 consta de un sistema de potencia de tres barras, este ejemplo fue obtenido de
la referencia bibliográfica ANDERSON, y por ende los resultados se compararon también con
estos. Este ejercicio tiene dos etapas de generación aportadas por un sistema sincrónico, el
cual es relativamente sencillo, pero fue realizado con el fin de comparar resultados internos de
cálculo del programa CORTOCIRCUITO y observar su correcto funcionamiento. Las tablas
4.4 y 4.5 muestran los resultados obtenidos en todas las fuentes y se puede observar que no
tienen diferencias notables entre sí, puesto que en la primera tabla la corriente de interrupción
para el fallo monofásico en NEPLAN es de 55.44 [kA] y en el programa realizado es 55.13
[kA], lo que permite validar los resultados arrojados por la herramienta computacional
realizada. Las discrepancias presentes se deben a la metodología de cálculo utilizada tanto en
los programas como en la referencia bibliográfica.
En el ejemplo 2, se observa un sistema de potencia de 14 barras, tomado al igual que el
caso anterior de la referencia bibliográfica ANDERSON. Este sistema está formado por varias
etapas de generación, y por una serie de transformadores de dos devanados, distribuidos en el
sistema. Y en este proceso se comprobó la correcta formación de las secuencias dependiendo
de la conexión de los transformadores. Las tablas 4.10 y 4.11 muestran los resultados
obtenidos por los programas y se observa que, existen de nuevo diferencias que se deben a las
mismas razones nombradas anteriormente. Sin embargo, estas discrepancias, no son
considerables, y por ello se siguen certificando los datos obtenidos por la herramienta
computacional realizada.
Por último, en el ejemplo 3, obtenido del texto de ARRILLAGA, se presenta un sistema de
potencia de 19 barras, el cual es un caso real, que se encuentra en Nueva Zelanda. Los
81
resultados correspondientes a este ejemplo se observan en las tablas 4.15 y 4.16, y con estos
se puede asegurar que el programa ejecutado arroja resultados confiables. En este caso las
diferencias mínimas obtenidas pueden atribuirse al método implementado internamente para
lograr los mismos, debido al manejo de cifras decimales en los cálculos, así como también el
proceso de manejo de resolución de matrices a gran escala. Se puede indicar, al igual que en
los modelos anteriores, seguridad en los cálculos realizados y los obtenidos, dando
credibilidad a la herramienta para ser implementada en el área real de trabajo.
En cuanto a la metodología de técnicas de matrices ralas (Sparsity), se presentan los
resultados conseguidos por el programa en las tablas que se encuentran en los anexos, y de
ellas se observa que las técnicas se realizan en forma precisa, pudiendo seguirse cada
subrutina de acuerdo a los cálculos obtenidos. Los datos se almacenan de forma adecuada y al
momento de hacer la simulación del proceso de eliminación es el más óptimo, de allí se
derivan los factores matriciales que han sido comparados en el ejemplo 1, y se certifica su
buen funcionamiento. Y estos resultados aunados a los obtenidos en las tablas (4.4, 4.5, 4.10,
4.11, 4.15 y 4.16) garantizan y dan credibilidad al programa CORTOCIRCUITO.
CONCLUSIONES
Se estudió el método de eliminación de Gauss utilizado para la solución de sistemas
lineales de ecuaciones, por medio de las transformaciones LU, LDU y LR, para conseguir
la inversa de la matriz de admitancia en forma factorizada, con esto se logró entender y
desarrollar las técnicas de matrices ralas (Sparsity).
Se estudiaron los métodos de cálculo de la corriente de cortocircuito, basado en el Teorema
de Thévenin en coordenadas de secuencia y se aplicó en la solución el método de la matriz
de impedancia de barra por ser la técnica más adecuada. Además se estudió el estándar
ANSI IEEE C.037.010.
Se implementaron las técnicas de matrices ralas (Sparsity) de manera adecuada, de acuerdo
al fallo estudiado, dentro del programa, lo cual se traduce en ahorro de uso de memoria, y a
su vez en rapidez al momento de obtención de resultados.
Se realizó un programa en lenguaje de programación FORTRAN, basado en la inversa de la
matriz de admitancia en forma factorizada, permitiendo calcular la corriente simétrica de
cortocircuito, permitiendo reducir el tiempo de operación y los requerimientos de
almacenamiento.
Se desarrolló el programa CORTOCIRCUITO para ajustar los resultados de acuerdo a la
norma ANSI/IEEE 37.010. para cálculos de primer ciclo y de interrupción después de
ocurrido un fallo. Este y el anterior debe ser redactado mejor!!!!!!!
Se estudiaron diferentes (ejemplos) sistemas de potencia en el programa
CORTOCIRCUITO, a los cuales se le aplicaron los diferentes tipos de fallo y se obtuvieron
resultados compatibles con los obtenidos por NEPLAN y referencias bibliográficas,
validando, de esta manera, los resultados obtenidos con el programa desarrrollado.
Redactar mejor

83
RECOMENDACIONES
Con el fin de hacer más completo el programa realizado, para su posterior uso en las diferentes
áreas de potencia se recomienda:
Se sugiere complementar la herramienta computacional con módulos que permitan
seleccionar el método de cálculo de corriente de cortocircuito rigiéndose por otras normas,
tales como: IEC60909 2001, IEC909 1988, IEC6133-1 e IEC1660-1 (DC).
Se propone adicionar el cálculo de fallos simultáneos y fallos seria al programa actual, ya
que éste puede ser adaptado para manejar esta nueva opción.
Para mejorar la experiencia del usuario se sugiere acoplar el programa para trabajar
mediante una interfaz gráfica.

84
REFERENCIAS BIBLIOGRÁFICAS
Arrillaga, J. and Watson N.R. (2001). "Computer Modelling of Electrical Power System".
Nueva Zelanda: John Wiley & Sons Ltd.
Anderson, P. (1973). "Analysis of Faulted Power Systems". Estados Unidos: Paul M.
Anderson Editors.
Brameller, R. N. Allan and Y.M. Hamam, (1976). "Sparsity". Nueva Zelanda: Pitman INC.
Das, J. C. (2002). "Power System Analysis Short-Circuit Load Flow and Harmonics". Estados
Unidos: Marcel Dekker, Inc.
Davis, C. (2006). "IEEE Violet Book. Calculating Short-Circuit Currents in Industrial and
Commercial Power Systems". Estados Unidos: Institute of Electrical and Electronics
Engineers, Inc.
Dhar , R. (1982). "Computer Aided Power System Operation & Analysis". Estados Unidos:
McGraw-Hill.
Díaz, J. (2012). "Herramienta computacional basada en la matriz de admitancia para el
cálculo de la corriente simpétrica de cortocircuito".Universidad de Los Andes. Mérida-
Venezuela.
Duncan G., J. (2008). "Power System Analysis and Design". Cuarta edición. Estados Unidos:
Thomson.
85
EATON. (2003). "Power Distribution Systems".EATON Powering Business Worldwide.
Estados Unidos.
Grigsby, L. (2009). "Electric Energy Systems, Analysis and Operation". Estados Unidos:
Taylor & Francis Group, LLC.
Harper, E. (1999). "Protección de Instalaciones Eléctricas Industriales y Comerciales".
México: Limusa.
Mora, E. (2010). "Notas de sistemas avanzados de potencia".Universidad de Los Andes.
Venezuela.
Nasser, T. (2008). "Power systems modelling and fault analysis. Teory and practice". India:
Elsevier Ltd.
Stevenson, W. (1994). "Power system analysis". Estados Unidos: McGraw-Hill.
86
APÉNDICEA
A.1. Diagrama de bloques de la subrutina ACDM (ALMACENAMIENTO COMPACTO)

87
Figura A. 1. Diagrama de la subrutina ACDM (almacenamiento compacto).

88
A.2. Diagrama de bloques de la subrutina OODM (ORDEN DE
ELIMINACIÓN)
Figura A. 2. Diagrama de la subrutina OODM (orden de eliminación).
89
A.3. Diagrama de bloques de la subrutina FDM (FACTORIZACIÓN)
Figura A. 3. Diagrama de la subrutina FDM (factorización).
90
A.4. Diagrama de bloques de la subrutina SSEL (SOLUCIÓN NUMÉRICA)
Figura A. 4. Diagrama de la subrutina SSEL (solución numérica).

91




![Musc Pres Para Correciones[1]](https://static.fdocuments.net/doc/165x107/5571fc4a497959916996ecb2/musc-pres-para-correciones1.jpg)







![Administracion de redes diapositiva[1] con correciones](https://static.fdocuments.net/doc/165x107/5563cf77d8b42aa0588b5242/administracion-de-redes-diapositiva1-con-correciones.jpg)





