Systèmes d’équations linéaires
22
Systèmes d’équations Systèmes d’équations linéaires linéaires Étude de contexte et résolution
description
Systèmes d’équations linéaires. Étude de contexte et résolution. Ces droites n’ont qu’un point d’intersection. Système à solution unique. Ces droites n’ont pas d’intersection. Système inconsistant. Ces droites sont confondues. Système avec une infinité de solutions. - PowerPoint PPT Presentation
Transcript of Systèmes d’équations linéaires

Systèmes d’équations linéairesSystèmes d’équations linéaires
Étude de contexte
et
résolution

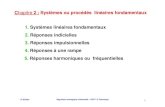
Système à solution uniqueSystème à solution unique
Ces droites n’ont qu’un point d’intersection

Système inconsistantSystème inconsistant
Ces droites n’ont pas d’intersection

Système avec une infinité de Système avec une infinité de solutionssolutions
Ces droites sont confondues

Nombre de solutions d’un système Nombre de solutions d’un système d’équations linéairesd’équations linéaires
• Les exemples précédents se généralisent à un système de plus de 2 variables
• Donc, l’ensemble solution d’un système d’équations linéaires AX=B peut posséder– Aucune solution– Une solution unique– Une infinité de solutions

Systèmes d’équations Systèmes d’équations équivalentséquivalents
• Deux systèmes d’équations sont équivalents s’ils possèdent le même ensemble solution.
Par exemple, les deux systèmes suivants
sont équivalents

- L’addition d’un multiple d’une ligne à une autre ligne
- La multiplication d’une ligne par une constante non nulle
• Il y a trois types d’opérations que l’on peut faire sur les lignes d’un système d’équations linéaires qui ne changent pas l’ensemble solution de ce système
Opérations élémentaires sur les Opérations élémentaires sur les ligneslignes
ji LL
ii kLL
jii kLLL
- L’interversion de deux lignes

Exemple de transformations d’un Exemple de transformations d’un système d’équations linéairessystème d’équations linéaires
21 LL
133 LLL

122 2 LLL
22 LL 33
21 LL
Système initialet final
(équivalents)

Matrice augmentée d’un système Matrice augmentée d’un système d’équations linéairesd’équations linéaires
• La matrice augmentée est la matrice des coefficients à laquelle on a ajoutée la colonne des constantes

ExempleExemple

Méthode de la matrice escalierMéthode de la matrice escalier
• Deux matrices sont équivalentes si on peut obtenir l’une des matrices en effectuant des opérations élémentaires sur les lignes de l’autre matrice
• La méthode de la matrice escalier consiste à résoudre un système d’équations linéaires en effectuant des opérations élémentaires sur les lignes de la matrice augmentée du système de manière à obtenir une matrice escalier équivalente (sans nécessairement les pivots à 1)

Exemple


Infinité de solutionsInfinité de solutions
Deux variables sont ici libres

Système inconsistantSystème inconsistant
La dernière ligne est contradictoire

Rang d’une matriceRang d’une matrice
• Le rang d’une matrice A est le nombre de lignes non nulles d’une matrice échelonnée équivalente à A
Le rang de A est 2

ThéorèmeThéorème

Méthode de Gauss-JordanMéthode de Gauss-Jordan
• C’est un prolongement de la méthode de la matrice escalier. Elle consiste à effectuer des opérations élémentaires sur la matrice augmentée du système pour la transformer en une matrice escalier dont les pivots sont les seuls éléments non nuls de leurs colonnes respectives.
• La solution du système sera alors directement accessible dans la matrice.

Exemple
Donc x = -1, y = ½ et z = ¼

Calcul de la matrice inverse par la Calcul de la matrice inverse par la méthode de Gauss-Jordanméthode de Gauss-Jordan
• Pour trouver l’inverse d’une matrice A, on augmente la matrice A de la matrice identité de même ordre ( A|In)
• on effectue ensuite des transformations élémentaires sur les lignes pour obtenir la matrice identité à gauche (In|B)
• la matrice B ainsi obtenue est la matrice inverse de A

Exemple