
Commande robuste des systèmes non linéaires complexes
52
Tˆ ache 2 : Contrˆole - Commande Objectifs : I Proposer une famille de lois de commandes robustes pour des syst` emes non lin´ eaires complexes (Eco-automatisation) : Th` ese de M. Manceur, I Synth` ese de lois de commandes tol´ erantes aux fautes
Transcript of Commande robuste des systèmes non linéaires complexes
Tache 2 : Controle - CommandeObjectifs :
I Proposer une famille de lois de commandes robustes pour dessystemes non lineaires complexes (Eco-automatisation) :These de M. Manceur,
I Synthese de lois de commandes tolerantes aux fautes
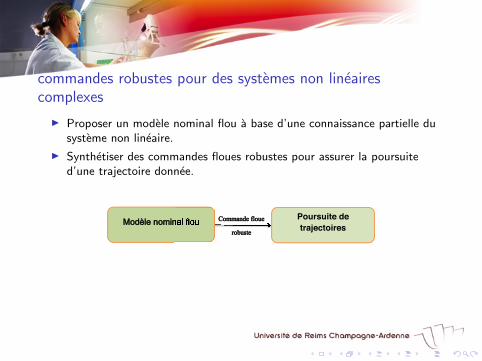
commandes robustes pour des systemes non lineairescomplexes
I Proposer un modele nominal flou a base d’une connaissance partielle dusysteme non lineaire.
I Synthetiser des commandes floues robustes pour assurer la poursuited’une trajectoire donnee.
Poursuite de trajectoires

Systeme non lineaire perturbe
⇢x
(n) = f0(x) + g0(x) · u(t) + D
y = x
⇢D = �f (x) +�g(x)u + d
DM = �f +�guM +�d , |u| uM
Construction du modele nominal
Modelisation floue TS [Takagi et Sugeno, 1985]
I Le systeme flou TS exploite les modeles locaux du systeme de la forme :x(t) = Aix(t) + Biu(t)
Modelisation TS floue de type-2La i eme regle du modele flou type-2 TS s’ecrit :
Si x1 est F i1 et x2 est F i
2 et.....et xn est F in Alors
x (n) = Ai (n, 1 : n)x + Bi (n)u
ou F ij est le j eme ensemble flou type-2 intervalle, i designe le nombre de regles et A(n, 1 : n) = A(n, j)1jn .

Modele nominal flou
I Pour une paire (x , u), le modele nominal flou est donne par :
x (n) =rX
i=1
hi (x) {Ai (n, 1 : n)x + Bi (n)u}
hi (x) =12
⇣wi (x)Pri=1 wi (x)
+ wi (x)Pri=1 wi (x)
⌘
I Si l’on note par : f0(x) =rP
i=1hi (x)Ai (n, 1 : n)x et g0(x) =
rPi=1
hi (x)Bi (n)
I On obtient le modele nominal flou suivant :
x (n) = f0(x) + g0(x)u
Commande par modes glissants d’ordre superieur
Principe de fonctionnement des modes glissants d’ordresuperieur
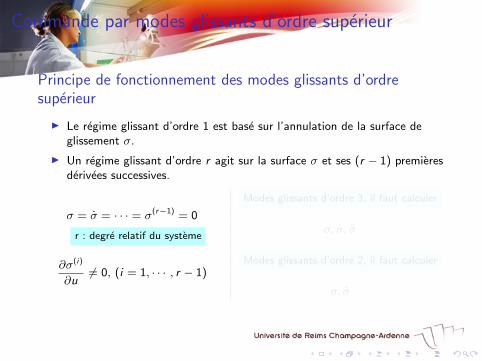
I Le regime glissant d’ordre 1 est base sur l’annulation de la surface deglissement �.
I Un regime glissant d’ordre r agit sur la surface � et ses (r � 1) premieresderivees successives.
� = � = · · · = �(r�1) = 0
r : degre relatif du systeme
@�(i)
@u6= 0, (i = 1, · · · , r � 1)
Modes glissants d’ordre 3, il faut calculer
�, �, �
Modes glissants d’ordre 2, il faut calculer
�, �
Commande par modes glissants d’ordre superieur
Principe de fonctionnement des modes glissants d’ordresuperieur
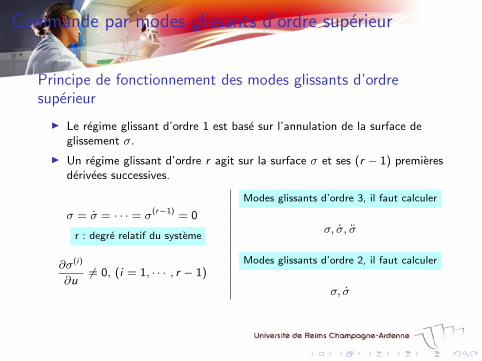
I Le regime glissant d’ordre 1 est base sur l’annulation de la surface deglissement �.
I Un regime glissant d’ordre r agit sur la surface � et ses (r � 1) premieresderivees successives.
� = � = · · · = �(r�1) = 0
r : degre relatif du systeme
@�(i)
@u6= 0, (i = 1, · · · , r � 1)
Modes glissants d’ordre 3, il faut calculer
�, �, �
Modes glissants d’ordre 2, il faut calculer
�, �
Precision des modes glissants
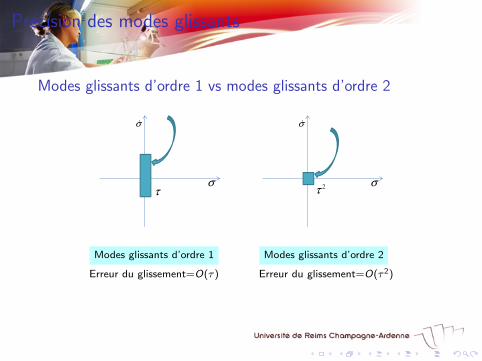
Modes glissants d’ordre 1 vs modes glissants d’ordre 2
σ&
στ
σ&
σ2τ
Modes glissants d’ordre 1 Modes glissants d’ordre 2
Erreur du glissement=O(⌧) Erreur du glissement=O(⌧2)
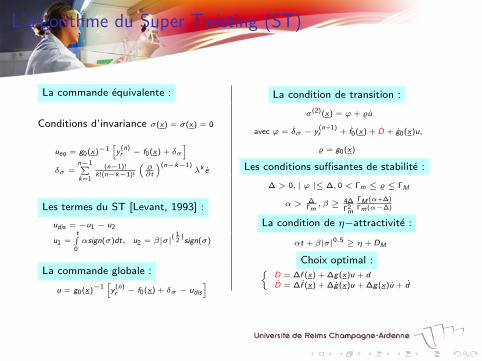
L’algorithme du Super Twisting (ST)
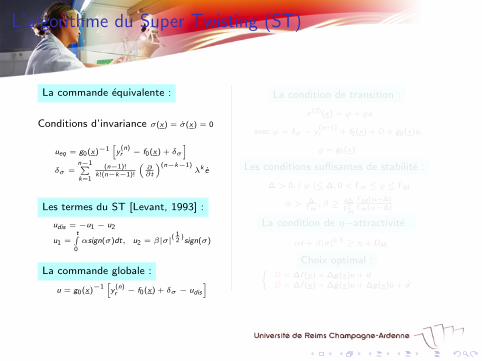
La commande equivalente :
Conditions d’invariance �(x) = �(x) = 0
ueq = g0(x)�1
hy(n)r � f0(x) + ��
i
�� =n�1P
k=1
(n�1)!k!(n�k�1)!
⇣@@t
⌘(n�k�1)�k e
Les termes du ST [Levant, 1993] :
udis = �u1 � u2
u1 =tR
0↵sign(�)dt, u2 = �|�|(
12 )
sign(�)
La commande globale :
u = g0(x)�1
hy (n)r � f0(x) + �� � udis
i
La condition de transition :
�(2)(x) = ' + %u
avec ' = �� � y(n+1)r + f0(x) + D + g0(x)u,
% = g0(x)
Les conditions su�santes de stabilite :
� > 0, | ' | �, 0 < �m % �M
↵ > ��m
, � � 4��2m
�M (↵+�)�m(↵��)
La condition de ⌘�attractivite :
↵t + �|�|0.5 � ⌘ + DM
Choix optimal :⇢
D = �f (x) + �g(x)u + dD = �f (x) + �g(x)u + �g(x)u + d
L’algorithme du Super Twisting (ST)
La commande equivalente :
Conditions d’invariance �(x) = �(x) = 0
ueq = g0(x)�1
hy(n)r � f0(x) + ��
i
�� =n�1P
k=1
(n�1)!k!(n�k�1)!
⇣@@t
⌘(n�k�1)�k e
Les termes du ST [Levant, 1993] :
udis = �u1 � u2
u1 =tR
0↵sign(�)dt, u2 = �|�|(
12 )
sign(�)
La commande globale :
u = g0(x)�1
hy (n)r � f0(x) + �� � udis
i
La condition de transition :
�(2)(x) = ' + %u
avec ' = �� � y(n+1)r + f0(x) + D + g0(x)u,
% = g0(x)
Les conditions su�santes de stabilite :
� > 0, | ' | �, 0 < �m % �M
↵ > ��m
, � � 4��2m
�M (↵+�)�m(↵��)
La condition de ⌘�attractivite :
↵t + �|�|0.5 � ⌘ + DM
Choix optimal :⇢
D = �f (x) + �g(x)u + dD = �f (x) + �g(x)u + �g(x)u + d

Introduction
Commande par modes glissants
Commande par modes glissants floue
Commande par modes glissants floue a base de l’Integral SlidingMode
Conclusions et perspectives
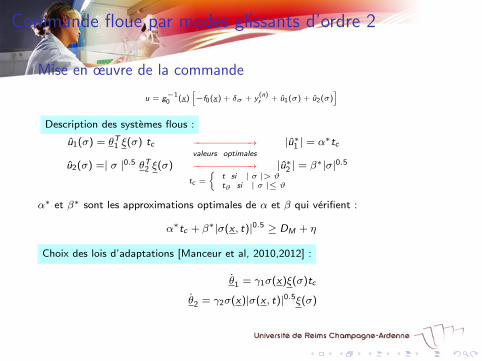
Commande floue par modes glissants d’ordre 2
Mise en œuvre de la commande
u = g�10 (x)
h�f0(x) + �� + y (n)r + u1(�) + u2(�)
i
Description des systemes flous :
u1(�) = ✓T1 ⇠(�) tc �����������! |u⇤1 | = ↵⇤tcvaleurs optimales
u2(�) =| � |0.5 ✓T2 ⇠(�) �����������! |u⇤2 | = �⇤|�|0.5
tc =
⇢t si | � |> #t# si | � | #
↵⇤ et �⇤ sont les approximations optimales de ↵ et � qui verifient :
↵⇤tc + �⇤|�(x , t)|0.5 � DM + ⌘
Choix des lois d’adaptations [Manceur et al, 2010,2012] :
✓1 = �1�(x)⇠(�)tc
✓2 = �2�(x)|�(x , t)|0.5⇠(�)
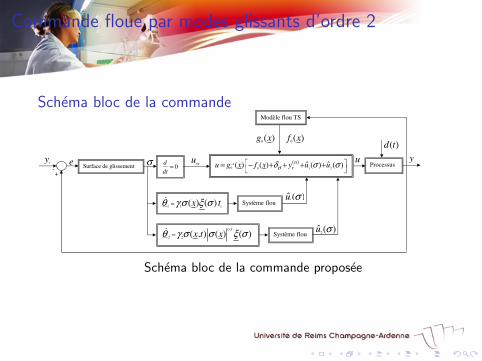
Commande floue par modes glissants d’ordre 2
Schema bloc de la commande
Surface de glissement e ry σ 0ddt
= 10 0 1 2
( ) ˆ ˆ( ) ( ) ( ) ( )nru g x f x y u uσδ σ σ− = − + + + +
equ y
1 1 ( ) ( ) cx tθ γ σ ξ σ=& Système flou
0.5
2 2 ( , ) ( ) ( )x t xθ γ σ σ ξ σ=& Système flou
Processus u
1( )u σ
2ˆ ( )u σ
Modèle flou TS
0( )g x 0( )f x
+ -
( )d t
Schema bloc de la commande proposee
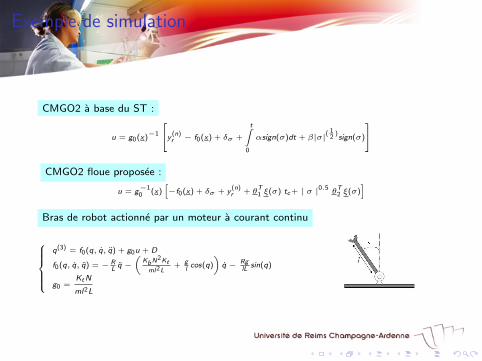
Exemple de simulation
CMGO2 a base du ST :
u = g0(x)�1
2
4y (n)r � f0(x) + �� +
tZ
0
↵sign(�)dt + �|�|(12 )
sign(�)
3
5
CMGO2 floue proposee :
u = g�10 (x)
h�f0(x) + �� + y (n)r + ✓T1 ⇠(�) tc+ | � |0.5 ✓T2 ⇠(�)
i
Bras de robot actionne par un moteur a courant continu
8>>>><
>>>>:
q(3) = f0(q, q, q) + g0u + D
f0(q, q, q) = � RL q �
✓KbN
2Ktml2L
+ gl cos(q)
◆q � Rg
lL sin(q)
g0 =KtN
ml2L
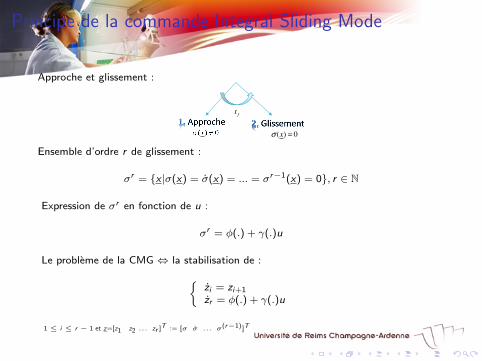
Principe de la commande Integral Sliding Mode
Approche et glissement :
( ) 0xσ ≠ ( ) 0xσ =
ft
Ensemble d’ordre r de glissement :
�r = {x |�(x) = �(x) = ... = �r�1(x) = 0}, r 2 N
Expression de �r en fonction de u :
�r = �(.) + �(.)u
Le probleme de la CMG , la stabilisation de :
⇢zi = zi+1
zr = �(.) + �(.)u
1 i r � 1 et z=[z1 z2 ... zr ]T := [� � ... �(r�1)]T
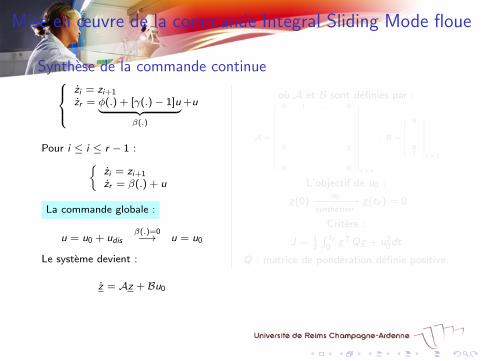
Mise en œuvre de la commande Integral Sliding Mode floue
Synthese de la commande continue8><
>:
zi = zi+1
zr = �(.) + [�(.)� 1]u| {z }
�(.)
+u
Pour i i r � 1 :
⇢zi = zi+1
zr = �(.) + u
La commande globale :
u = u0 + udis�(.)=0�! u = u0
Le systeme devient :
z = Az + Bu0
ou A et B sont definies par :
A =
2
666666666666666666664
0 1 . . . 0
.
.
.
...
...
.
.
.
0
...
... 1
0
...
... 0
3
777777777777777777775
r⇥r
, B =
2
6666666664
0
.
.
.01
3
7777777775
r⇥1
L’objectif de u0 :
z(0)u0������!
synthetiserz(tf ) = 0
Critere :
J = 12
R tf0 zTQz + u20dt
Q : matrice de ponderation definie positive.
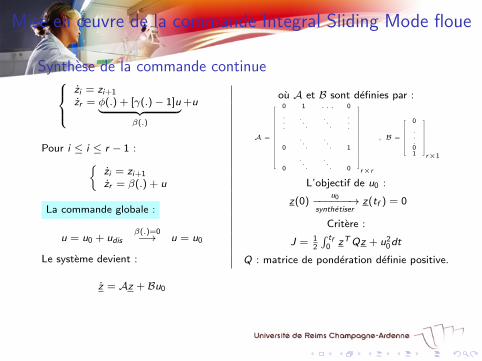
Mise en œuvre de la commande Integral Sliding Mode floue
Synthese de la commande continue8><
>:
zi = zi+1
zr = �(.) + [�(.)� 1]u| {z }
�(.)
+u
Pour i i r � 1 :
⇢zi = zi+1
zr = �(.) + u
La commande globale :
u = u0 + udis�(.)=0�! u = u0
Le systeme devient :
z = Az + Bu0
ou A et B sont definies par :
A =
2
666666666666666666664
0 1 . . . 0
.
.
.
...
...
.
.
.
0
...
... 1
0
...
... 0
3
777777777777777777775
r⇥r
, B =
2
6666666664
0
.
.
.01
3
7777777775
r⇥1
L’objectif de u0 :
z(0)u0������!
synthetiserz(tf ) = 0
Critere :
J = 12
R tf0 zTQz + u20dt
Q : matrice de ponderation definie positive.
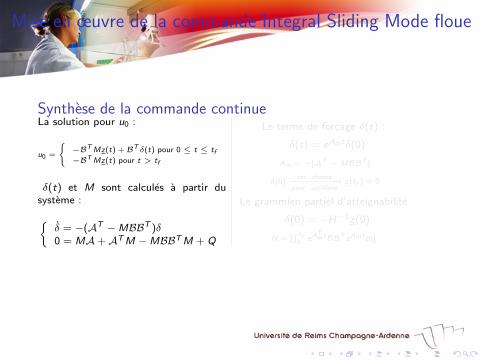
Mise en œuvre de la commande Integral Sliding Mode floue
Synthese de la commande continueLa solution pour u0 :
u0 =
(�BTMz(t) + BT �(t) pour 0 t tf�BTMz(t) pour t > tf
�(t) et M sont calcules a partir dusysteme :
⇢� = �(AT �MBBT )�0 = MA+ATM �MBBTM + Q
Le terme de forcage �(t) :
�(t) = eAmt�(0)
Am = �[AT � MBBT ]
�(0)est choisie���������!
pour satisfairez(tf ) = 0
Le grammien partiel d’atteignabilite
�(0) = �H�1z(0)
H = [R tf0 eA
TmtBBT eAmtdt]
Mise en œuvre de la commande Integral Sliding Mode floue
Synthese de la commande continueLa solution pour u0 :
u0 =
(�BTMz(t) + BT �(t) pour 0 t tf�BTMz(t) pour t > tf
�(t) et M sont calcules a partir dusysteme :
⇢� = �(AT �MBBT )�0 = MA+ATM �MBBTM + Q
Le terme de forcage �(t) :
�(t) = eAmt�(0)
Am = �[AT � MBBT ]
�(0)est choisie���������!
pour satisfairez(tf ) = 0
Le grammien partiel d’atteignabilite
�(0) = �H�1z(0)
H = [R tf0 eA
TmtBBT eAmtdt]
Mise en œuvre de la commande Integral Sliding Mode floue
Synthese de la surface Integral Sliding Mode⇢zi = zi+1
zr = �(.) + u0 + udis
udis = �u1(�)� u2(�)La surface de glissement modifiee :
� = �0 + ⇣
Cas particulier de la surface :
�0 = zr
La derivee de la surface modifiee :
� = u + �(.) + ⇣
La condition assurant � = 0, 8 t � 0 :
ueq = ��(.)⇣ = �u0, ⇣(0) = �zr (0)
Mise en œuvre de la commande Integral Sliding Mode floue
Synthese de la surface Integral Sliding Mode⇢zi = zi+1
zr = �(.) + u0 + udis
udis = �u1(�)� u2(�)La surface de glissement modifiee :
� = �0 + ⇣
Cas particulier de la surface :
�0 = zr
La derivee de la surface modifiee :
� = u + �(.) + ⇣
La condition assurant � = 0, 8 t � 0 :
ueq = ��(.)⇣ = �u0, ⇣(0) = �zr (0)
Mise en œuvre de la commande Integral Sliding Mode floue
Description des systemes flous :
u1(�) = ✓T1 ⇠(�) tf ������������! |u⇤1 | = ↵⇤tf
valeurs optimales
u2(�) =| � |0.5 ✓T2 ⇠(�) ������������! |u⇤2 | = �⇤|�|0.5
↵⇤ et �⇤ sont les approximations optimales de ↵ et � qui verifient :
↵⇤tf + �⇤|�(x)|0.5 � DM + ⌘
Choix des lois d’adaptations [Manceur et al, 2011] :
✓1 = �1�(x)⇠(�)tf
✓2 = �2�(x)|�(x)|0.5⇠(�)
Mise en œuvre de la commande Integral Sliding Mode floue
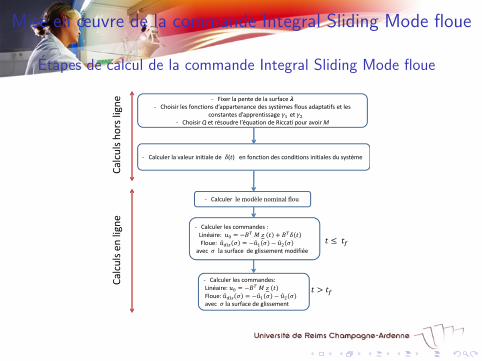
Etapes de calcul de la commande Integral Sliding Mode floue
- Fixer la pente de la surface !- Choisir les fonctions d’appartenance des systèmes flous adaptatifs et les
constantes d’apprentissage "#et "%- Choisir Q et résoudre l’équation de Riccati pour avoir M
- Calculer la valeur initiale de &(') en fonction des conditions initiales du système
- Calculer lemodèlenominalflou
- Calculer les commandes : Linéaire: 34 = −789: ' + 78& 'Floue: 3<=>? @ = −3<# @ − 3<% @
avec @la surface de glissement modifiée
- Calculer les commandes: Linéaire: 34 = −789: ' Floue: 3<=>? @ = −3<# @ − 3<% @ avec @la surface de glissement
' ≤ 'B
' > 'B
Calc
uls h
ors l
igne
Ca
lcul
s en
ligne
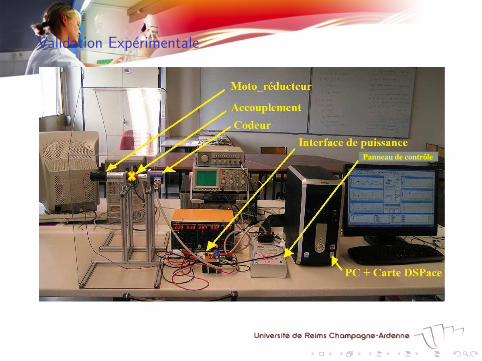
Validation Experimentale
Panneau de contrôle
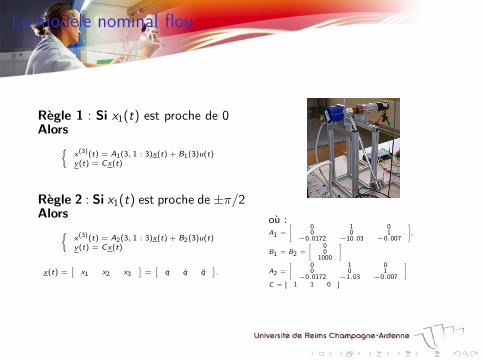
Le modele nominal flou
Regle 1 : Si x1(t) est proche de 0Alors
⇢x(3)(t) = A1(3, 1 : 3)x(t) + B1(3)u(t)y(t) = Cx(t)
Regle 2 : Si x1(t) est proche de ±⇡/2Alors
⇢x(3)(t) = A2(3, 1 : 3)x(t) + B2(3)u(t)y(t) = Cx(t)
x(t) =⇥
x1 x2 x3⇤=
⇥q q q
⇤.
ou :A1 =
2
640 1 00 0 1
�0.0172 �10.03 �0.007
3
75,
B1 = B2 =
2
6400
1000
3
75
A2 =
2
640 1 00 0 1
�0.0172 �1.03 �0.007
3
75
C = [ 1 1 0 ]

Parametres de validation
Surface de glissement : � = e + 2�e + �2e
Incertitudes et perturbations du systeme :
I La masse m = 0.5 kg et celle du bras de longueur l = 40 cm
I Les incertitudes d’identification des modeles locaux
I Un fort jeu
I Important frottement sec
I Opposition manuelle cyclique de 3 et 4 secondes
I Variation de la resistance caracterisee par l’e↵et de Joule
Objectif :
Les references : x1(t)suivre���! yr (t) = 1.5 sin(t) et x2(t)
suivre���! yr (t) = 1.5 cos(t)
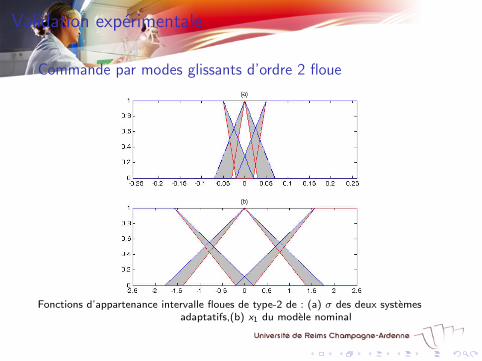
Validation experimentale
Commande par modes glissants d’ordre 2 floue
Fonctions d’appartenance intervalle floues de type-2 de : (a) � des deux systemesadaptatifs,(b) x1 du modele nominal
Validation experimentale
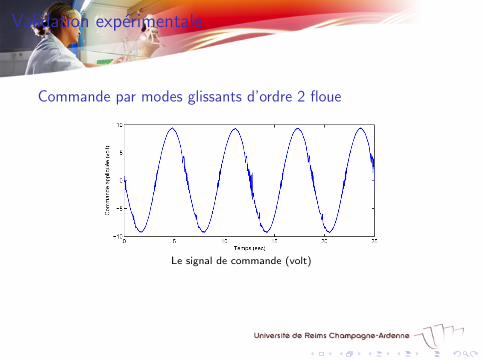
Commande par modes glissants d’ordre 2 floue
Le signal de commande (volt)
Validation experimentale
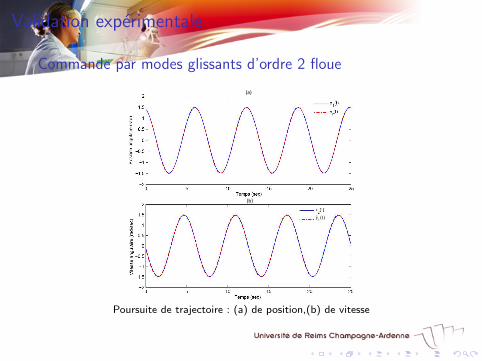
Commande par modes glissants d’ordre 2 floue
(a)
(b)
ry (t)&
Poursuite de trajectoire : (a) de position,(b) de vitesse
Validation experimentale
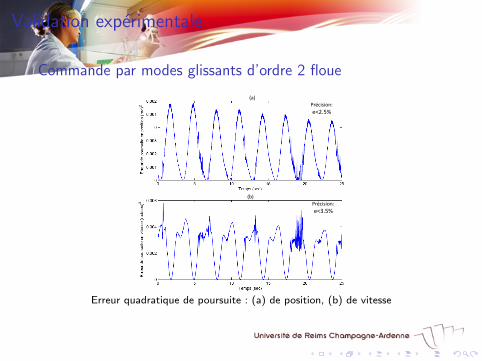
Commande par modes glissants d’ordre 2 floue
(a)
(b)
Précision:e<2.5%
Précision:e<3.5%
!!
Erreur quadratique de poursuite : (a) de position, (b) de vitesse
Validation experimentale
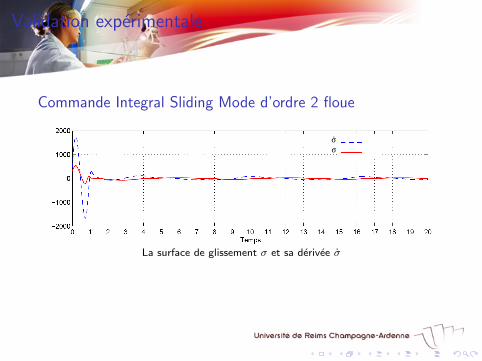
Commande Integral Sliding Mode d’ordre 2 floue
Validation experimentale
Commande Integral Sliding Mode d’ordre 2 floue
σ"σ
La surface de glissement � et sa derivee �
Validation experimentale
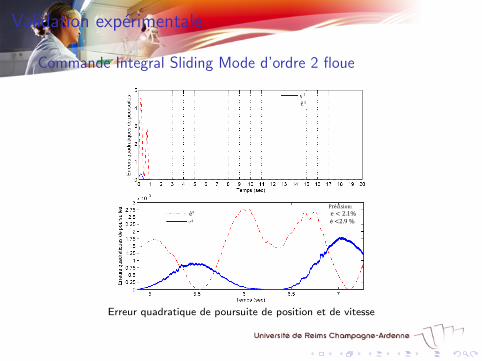
Commande Integral Sliding Mode d’ordre 2 floue
e"
e"Précision:e < 2.1%e" <2.9 %
3
3
3
3
Erreur quadratique de poursuite de position et de vitesse
Validation experimentale
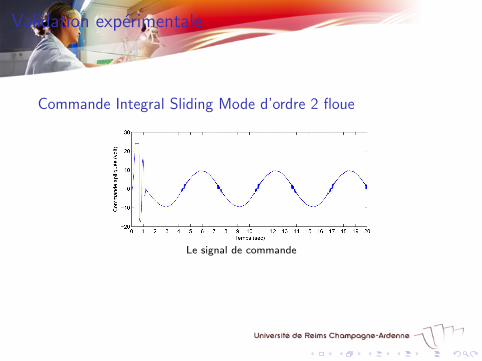
Commande Integral Sliding Mode d’ordre 2 floue
Le signal de commande
Validation experimentale
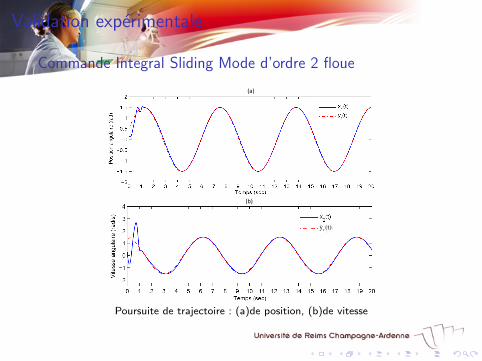
Commande Integral Sliding Mode d’ordre 2 floue
(a)
(b)
ry (t)&
Poursuite de trajectoire : (a)de position, (b)de vitesse
Conclusions
I Commande par modes glissants d’ordre deux floue .
I Commande par modes glissants d’ordre deux floue a base del’Integral Sliding Mode.
I Validation experimentale des deux approches proposees.
Travaux en coursAu niveau des systemes flous :
I Introduire des observateurs pour la reconstruction des etatsactivant les systemes flous et reduire le nombre de capteursutilises
Au niveau de la commande :
I Exploiter les resultats sur la commande tolerante aux fautespour maintenir les performances de poursuite en presence dedefaillances
Au niveau de l’eco-automatisation :
I Prendre en compte de ”l’energie verte” dans les criteresd’optimisation

Valorisation
I ArticlesI M. Manceur, N. Essounbouli and A. Hamzaoui, Second Order Sliding Fuzzy Interval Type-2 Control For
Uncertain System With Real Application, IEEE Transactions on Fuzzy Systems,vol. 20, pages : 262-275, 2012.
I Conferences internationales et nationalesI M. Manceur, L. Menhour, N. Essounbouli et A. Hamzaoui, MIMO Sliding Fuzzy Type-2 Control With
Manipulating Approaching Phase, the 2013 IEEE International Conference on Networking Sensing and Control(ICNSC 13), IEEE, Paris, France, avril 2013
I M. Manceur, N. Essounbouli et A. Hamzaoui, Simple Integral Sliding Fuzzy Type-2 Control For Non linearSystems, 2nd International Conference on Systems and Control, Marrakech, Morocco, juin 2012
I M. Manceur, N. Essounbouli and A. Hamzaoui, Two order sliding fuzzy type-2 control based on integral slidingmode for MIMO systems, the 7th conference of the European Society for Fuzzy Logic and Technology and lesRencontres Francophones sur la Logique Floue et ses Applications, Aix-Les- Bains, France, July 2011.
I M. Manceur, N. Essounbouli and A. Hamzaoui, Higher order sliding fuzzy type-2 interval control for SISOuncertain nonlinear systems, IEEE International Conference on Fuzzy Systems, Taipei, Taiwan, June 2011.
I M. Manceur, N. Essounbouli and A. Hamzaoui, Commande par modes glissants d’ordre superieur a gainsadaptatifs flous type-2 sans phase d’approche. 4eme Journees Doctorales / Journees Nationales MACS,Marseille, France, Juin, 2011.
I M. Manceur, N. Essounbouli and A. Hamzaoui, Commande floue type-2 par modes glissants d’ordre deux agains adaptatifs d’un systeme multivariable incertain. In Les rencontres Francophones sur la Logique Floue etses Applications, (LFA’10), Lannion, France, November 2010.
I M. Manceur, N. Essounbouli and A. Hamzaoui, MIMO Second Order Sliding Mode Fuzzy Type-2 Control, IEEEInternational Conference on Systems, Man and Cybernetics (SMC’10), Istanbul,TURKEY , October 2010.
I M. Manceur, N. Essounbouli and A. Hamzaoui, Robust Smooth Sliding Type-2 Interval Fuzzy Control ForUncertain System, IEEE International Conference on Fuzzy Systems, (IEEE FUZZ), Barcelona, Spane, July2010.
I M. Manceur, N. Essounbouli, A. Hamzaoui and F. Nollet, Commande floue robuste par modes glissants d’unsysteme non lineaire incertain et perturbe, Conference Internationale Francophone d’Automatique (CIFA 2010),Nancy, France, juin 2010.
Merci de votre Attention
Cas d’un systeme MIMO non lineaire
Modelisation floue type-2 TSLa i eme regle du modele flou type-2 TS s’ecrit :
Si x1 est H i1 et x2 est H i
2 et.....et xn est H in Alors
x = Ai (n1 : np, 1 : n)X + Bi (n1 : np, 1 : p)u
ou Hij , (j = 1, 2, ..., n) est le j eme ensemble flou de type-2 intervalle de la i eme regle.
A(n1 : np , 1 : n) et B(n1 : np , 1 : p) sont les matrices reduites de An⇥n et Bn⇥p ,
A(n1 : np , 1 : n) = A(i, j)n1inp1jn
et B(n1 : np , 1 : p) = B(i, j)n1inp1jp
.
Cas d’un systeme MIMO non lineaire
Modele nominal flou
I Pour une paire (X , u) le modele nominal flou sera donne par :
x =rX
i=1
hi (X ) {Ai (n1 : np, 1 : n)X + Bi (n1 : np, 1 : n)u} (1)
hi (X ) = 12
⇣wi (X )Pri=1 wi (x)
+ wi (X )Pri=1 wi (X )
⌘
I Sin on note par : F0(X ) =rP
i=1hi (X )Ai (n1 : np, 1 : n)X et
G0(X ) =rP
i=1hi (X )Bi (n1 : np, 1 : n)
I On obtient le modele nominal flou
x = F0(X ) + G0(X )u (2)
Cas d’un systeme MIMO non lineaire
Mise en œuvre de la commande
u = G�10 (X )
h�F0(X ) + �� + y (ni )
r+ u1(�) + u2(�)
i(3)
u1(�) ! u1 =
2
4tR
0↵1sign(�1)dt
...tR
0↵psign(�p)dt
3
5
u2(�) ! u2 =
�1|�1|
12 sign(�1)...
�m|�p |12 sign(�p)
�
La surface de glissement : � = [�1,�2, ...,�p] 2 Rp
� =
✓@@t
+ ⇤
◆(ni�1)
e
⇤ = diag [�i ], 1 i p, est une matrice diagonale (p ⇥ p). �i sont les pentespositives des sous-surfaces de glissements.
Cas d’un systeme MIMO non lineaire
Mise en œuvre de la commandeDescription des systemes flous :
u1(�) = ⇥T1 (�) tc ���������! |u⇤1 | = ↵⇤tc
valeur optimale
u2(�) =�diag | � |0.5
�⇥T
2 (�) ���������! |u⇤2 | = �⇤diag |�|0.5
tc =8<
:t si k�k > #t# si k�k# ( ⇥T = [✓1, ✓2, ..., ✓p ] (�) = diag [⇠i ] et diag
2
664|�i |( 12 )
3
775 , i = 1, ..., p.
↵⇤ et �⇤ sont les approximations optimales de ↵ et � :
k↵⇤tck+ k�⇤diag |�|12 k � DM + ⌘
Choix des lois d’adaptations [Manceur et al, 2010] :
⇥1 = �1�T (�)tc
⇥2 = �2�T (diag |�|(
12 )) (�)
Generalisation de la commande floue a base de l’IntegralSliding Mode au cas multivariables
La surface de glissement globale :
�r = [ �r1 �r
2 . . . �rp ]T , r 2 N
L’expression de �r en fonction de u :
�(r) = �(.) + �(.)u
�(.) 2 Rp , �(.) 2 Rp⇥p
Le probleme de la CMG , la stabilisation de :
⇢Zj = Zj+1
Zr = �(.) + �(.)u
pour 1 j r � 1, Z1 =
2
6666666664
z11z12...
z1p
3
7777777775
=
2
6666666664
�1�2...�p
3
7777777775
, Z2 =
2
6666666664
z21z22...
z2p
3
7777777775
=
2
66666666664
�1�2...�p
3
77777777775
,. . . ,Zr�1 =
2
6666666664
zr1zr2...
zrp
3
7777777775
=
2
66666666666666664
�(r�1)1
�(r�1)2...
�(r�1)p
3
77777777777777775
.
Generalisation de la methode au cas multivariables
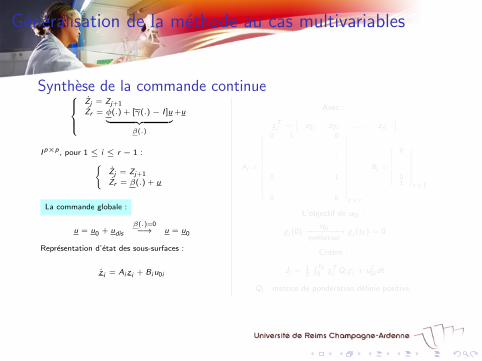
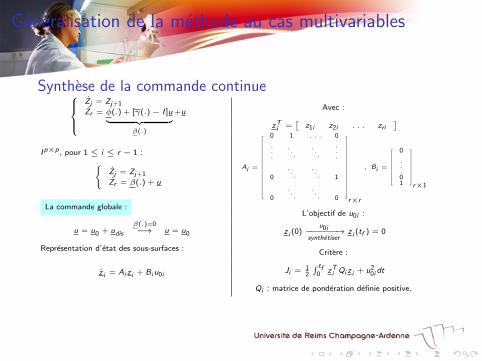
Synthese de la commande continue8>><
>>:
Zj = Zj+1Zr = �(.) + [�(.) � I ]u
| {z }�(.)
+u
I p⇥p , pour 1 i r � 1 :
(Zj = Zj+1Zr = �(.) + u
La commande globale :
u = u0 + udis�(.)=0�! u = u0
Representation d’etat des sous-surfaces :
z i = Ai zi + Bi u0i
Avec :
zTi =⇥
z1i z2i . . . zri⇤
Ai =
2
666666666666666666664
0 1 . . . 0
.
.
.
...
...
.
.
.
0
...
... 1
0
...
... 0
3
777777777777777777775
r⇥r
, Bi =
2
6666666664
0
.
.
.01
3
7777777775
r⇥1
L’objectif de u0i :
zi (0)u0i������!
synthetiserzi (tf ) = 0
Critere :
Ji = 12
R tf0 zTi Qi zi + u20i dt
Qi : matrice de ponderation definie positive.
Generalisation de la methode au cas multivariables
Synthese de la commande continue8>><
>>:
Zj = Zj+1Zr = �(.) + [�(.) � I ]u
| {z }�(.)
+u
I p⇥p , pour 1 i r � 1 :
(Zj = Zj+1Zr = �(.) + u
La commande globale :
u = u0 + udis�(.)=0�! u = u0
Representation d’etat des sous-surfaces :
z i = Ai zi + Bi u0i
Avec :
zTi =⇥
z1i z2i . . . zri⇤
Ai =
2
666666666666666666664
0 1 . . . 0
.
.
.
...
...
.
.
.
0
...
... 1
0
...
... 0
3
777777777777777777775
r⇥r
, Bi =
2
6666666664
0
.
.
.01
3
7777777775
r⇥1
L’objectif de u0i :
zi (0)u0i������!
synthetiserzi (tf ) = 0
Critere :
Ji = 12
R tf0 zTi Qi zi + u20i dt
Qi : matrice de ponderation definie positive.
Generalisation de la methode au cas multivariables
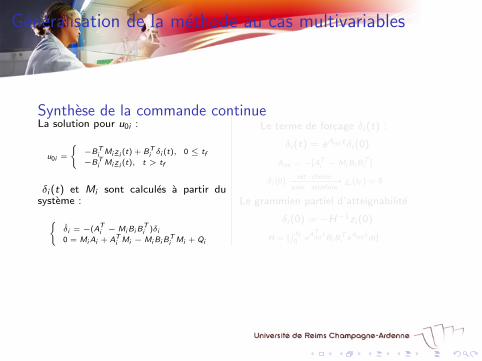
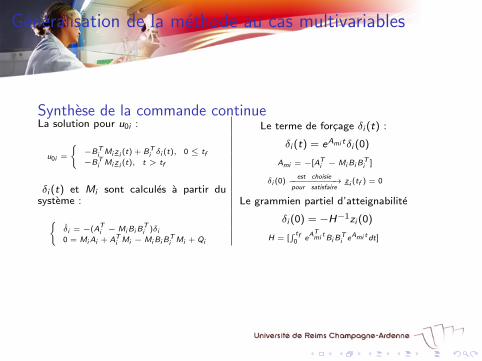
Synthese de la commande continueLa solution pour u0i :
u0i =
(�BT
i Mi zi (t) + BTi �i (t), 0 tf
�BTi Mi zi (t), t > tf
�i (t) et Mi sont calcules a partir dusysteme :
(�i = �(AT
i � MiBiBTi )�i
0 = MiAi + ATi Mi � MiBiB
Ti Mi + Qi
Le terme de forcage �i (t) :
�i (t) = eAmi t�i (0)
Ami = �[ATi � MiBiB
Ti ]
�i (0)est choisie���������!
pour satisfairezi (tf ) = 0
Le grammien partiel d’atteignabilite
�i (0) = �H�1zi (0)
H = [R tf0 eA
Tmi tBi B
Ti eAmi t dt]
Generalisation de la methode au cas multivariables
Synthese de la commande continueLa solution pour u0i :
u0i =
(�BT
i Mi zi (t) + BTi �i (t), 0 tf
�BTi Mi zi (t), t > tf
�i (t) et Mi sont calcules a partir dusysteme :
(�i = �(AT
i � MiBiBTi )�i
0 = MiAi + ATi Mi � MiBiB
Ti Mi + Qi
Le terme de forcage �i (t) :
�i (t) = eAmi t�i (0)
Ami = �[ATi � MiBiB
Ti ]
�i (0)est choisie���������!
pour satisfairezi (tf ) = 0
Le grammien partiel d’atteignabilite
�i (0) = �H�1zi (0)
H = [R tf0 eA
Tmi tBi B
Ti eAmi t dt]
Generalisation de la methode au cas multivariables
Synthese de la surface Integral Sliding Mode⇢Zj = Zj+1
Zr = �(.) + u0 + udis
udis = �u1(�)� u2(�)La surface de glissement modifiee :
� = �0 + ⇣
Avec � 2 Rp , �T0 = [�01, ...,�0p ], ⇣T =
[⇣1, ..., ⇣p ]
Cas particulier de la surface :
�0 = Zr
La derivee de la surface modifiee :
� = u + �(.) + ⇣
La condition assurant � = 0, 8 t � 0 :
ueq = ��(.)⇣ = �u0, ⇣(0) = �Zr (0)
Generalisation de la methode au cas multivariables
Synthese de la surface Integral Sliding Mode⇢Zj = Zj+1
Zr = �(.) + u0 + udis
udis = �u1(�)� u2(�)La surface de glissement modifiee :
� = �0 + ⇣
Avec � 2 Rp , �T0 = [�01, ...,�0p ], ⇣T =
[⇣1, ..., ⇣p ]
Cas particulier de la surface :
�0 = Zr
La derivee de la surface modifiee :
� = u + �(.) + ⇣
La condition assurant � = 0, 8 t � 0 :
ueq = ��(.)⇣ = �u0, ⇣(0) = �Zr (0)
Generalisation de la methode au cas multivariables
Description des systemes flous :
u1(�) = ⇥T1 (�) tf ���������! |u⇤1 | = ↵⇤tf
valeur optimale
u2(�) =�diag | � |0.5
�⇥T
2 (�) ���������! |u⇤2 | = �⇤|�|0.5
↵⇤ et �⇤ sont les approximations optimales de ↵ et � qui verifient :
k↵⇤tf k+ k �⇤diag|�|0.5k � DM + ⌘
Choix des lois d’adaptations [Manceur et al, 2011] :
⇥1 = �1�T (�)tf⇥2 = �2�T (diag |�|(
12 )) (�)


















