
RESEARCH ARTICLE Dynamic Positioning for an Underactuated ...


2
SynGrasp: A Matlab Toolboxfor Underactuated and Compliant Hands
Version 2.2
User Guide
Monica Malvezzi, Gionata Salvietti,Guido Gioioso, and Domenico Prattichizzo
September 24, 2015
Contents
1 Introduction 61.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2 Related works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3 Contacts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.4 How to get the software . . . . . . . . . . . . . . . . . . . . . . . . . 71.5 Installation, Matlab version issues . . . . . . . . . . . . . . . . . . . 71.6 License and copyright . . . . . . . . . . . . . . . . . . . . . . . . . . 81.7 Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.8 Acknowledgments . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Overview of the toolbox 102.1 Toolbox organization . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.1 Hand modeling . . . . . . . . . . . . . . . . . . . . . . . . . 102.1.2 Grasp planning . . . . . . . . . . . . . . . . . . . . . . . . . 112.1.3 Grasp analysis and optimization . . . . . . . . . . . . . . . . 112.1.4 Graphics and GUI . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 How to use SynGrasp . . . . . . . . . . . . . . . . . . . . . . . . . . 122.3 Hand Modelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3.1 Hand structure . . . . . . . . . . . . . . . . . . . . . . . . . 132.3.2 Hand joint coupling . . . . . . . . . . . . . . . . . . . . . . 14
2.4 Grasp Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.5 Grasp analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3 Tutorial and examples 233.1 A first example with the paradigmatic hand . . . . . . . . . . . . . . 23
3.1.1 How to define a hand . . . . . . . . . . . . . . . . . . . . . . 233.1.2 How to load a hand model . . . . . . . . . . . . . . . . . . . 253.1.3 How to define a grasp . . . . . . . . . . . . . . . . . . . . . 263.1.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2 Analysis of a tripod grasp . . . . . . . . . . . . . . . . . . . . . . . . 283.2.1 Grasp definition . . . . . . . . . . . . . . . . . . . . . . . . . 293.2.2 Quasi–static analysis of the grasping . . . . . . . . . . . . . . 303.2.3 Rigid body motions . . . . . . . . . . . . . . . . . . . . . . . 313.2.4 Grasp force optimization . . . . . . . . . . . . . . . . . . . . 31
1

CONTENTS 2
3.2.5 Manipulability analysis . . . . . . . . . . . . . . . . . . . . . 323.3 Hand writing modeling and evaluation . . . . . . . . . . . . . . . . . 323.4 Mapping human hand synergies onto robotic hands . . . . . . . . . . 343.5 Modeling and analysis of underactuated hands . . . . . . . . . . . . . 383.6 Grasp planner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4 Useful readings 444.1 On Motion and Force Control of Grasping Hands with Postural Synergies 444.2 On the Role of Hand Synergies in the Optimal Choice of Grasping Forces 444.3 On Motion and Force Controllability of Precision Grasps with Hands
Actuated by Soft Synergies . . . . . . . . . . . . . . . . . . . . . . . 454.4 On the manipulability ellipsoids of underactuated robotic hands with
compliance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454.5 Internal force control with no object motion in compliant robotic grasps 464.6 Mapping synergies from human to robotic hands with dissimilar kine-
matics: an object based approach . . . . . . . . . . . . . . . . . . . . 464.7 Object motion-decoupled internal force control for a compliant multi-
fingered hand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474.8 On the Use of Homogeneous Transformations to Map Human Hand
Movements onto Robotic Hands . . . . . . . . . . . . . . . . . . . . 474.9 Evaluation of grasp stiffness in underactuated compliant hands . . . . 484.10 An object-based mapping algorithm to control wearable robotic extra-
fingers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484.11 Digital Handwriting with a Finger or a Stylus: a Biomechanical Com-
parison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484.12 Modeling Compliant Grasps Exploiting Environmental Constraints . . 49
5 List of Functions 505.1 Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.1.1 SGcheckFriction() . . . . . . . . . . . . . . . . . . . . . . . 505.1.2 SGforceManipulability() . . . . . . . . . . . . . . . . . . . . 515.1.3 SGgraspAnalysis() . . . . . . . . . . . . . . . . . . . . . . . 515.1.4 SGgraspStiffness() . . . . . . . . . . . . . . . . . . . . . . . 525.1.5 SGkinManipulability() . . . . . . . . . . . . . . . . . . . . . 525.1.6 SGquasistatic() . . . . . . . . . . . . . . . . . . . . . . . . . 535.1.7 SGquasistaticHsolution() . . . . . . . . . . . . . . . . . . . . 535.1.8 SGquasistaticMaps() . . . . . . . . . . . . . . . . . . . . . . 545.1.9 SGrbMotions() . . . . . . . . . . . . . . . . . . . . . . . . . 545.1.10 SGslide() . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555.1.11 SGVcost() . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.2 Graphics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 575.2.1 SGhandFrames() . . . . . . . . . . . . . . . . . . . . . . . . 575.2.2 SGplotBase() . . . . . . . . . . . . . . . . . . . . . . . . . . 575.2.3 SGplotContactForces() . . . . . . . . . . . . . . . . . . . . . 575.2.4 SGplotContactPoints() . . . . . . . . . . . . . . . . . . . . . 585.2.5 SGplotframe() . . . . . . . . . . . . . . . . . . . . . . . . . 58
CONTENTS 3
5.2.6 SGplotGripper() . . . . . . . . . . . . . . . . . . . . . . . . 585.2.7 SGplotHand() . . . . . . . . . . . . . . . . . . . . . . . . . . 585.2.8 SGplotjoint() . . . . . . . . . . . . . . . . . . . . . . . . . . 595.2.9 SGplotLink() . . . . . . . . . . . . . . . . . . . . . . . . . . 595.2.10 SGplotObject() . . . . . . . . . . . . . . . . . . . . . . . . . 595.2.11 SGplotPalm() . . . . . . . . . . . . . . . . . . . . . . . . . . 605.2.12 SGplotPalmGripper() . . . . . . . . . . . . . . . . . . . . . . 605.2.13 SGplotSyn() . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.3 Grasp definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 615.3.1 SGaddContact() . . . . . . . . . . . . . . . . . . . . . . . . . 615.3.2 SGaddFtipContact() . . . . . . . . . . . . . . . . . . . . . . 615.3.3 SGcontact() . . . . . . . . . . . . . . . . . . . . . . . . . . . 625.3.4 SGgraspMatrix() . . . . . . . . . . . . . . . . . . . . . . . . 625.3.5 SGjaacobianMatrix() . . . . . . . . . . . . . . . . . . . . . . 625.3.6 SGremoveContact() . . . . . . . . . . . . . . . . . . . . . . 635.3.7 SGselectionMatrix() . . . . . . . . . . . . . . . . . . . . . . 63
5.4 Grasp quality metrics . . . . . . . . . . . . . . . . . . . . . . . . . . 645.4.1 SGdistSingularConfiguration() . . . . . . . . . . . . . . . . . 645.4.2 SGferrariCanny() . . . . . . . . . . . . . . . . . . . . . . . . 645.4.3 SGgraspIsotropyIndex() . . . . . . . . . . . . . . . . . . . . 655.4.4 SGmanipEllisoidVolume() . . . . . . . . . . . . . . . . . . . 655.4.5 SGminSVG() . . . . . . . . . . . . . . . . . . . . . . . . . . 665.4.6 SGunifTransf . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.5 Grasp planner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 675.5.1 SGcloseHand () . . . . . . . . . . . . . . . . . . . . . . . . . 675.5.2 SGevaluateOffset () . . . . . . . . . . . . . . . . . . . . . . . 675.5.3 SGgraspPlanner . . . . . . . . . . . . . . . . . . . . . . . . 67
5.6 Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 695.6.1 SGactivateSynergies() . . . . . . . . . . . . . . . . . . . . . 695.6.2 SGblockJoints() . . . . . . . . . . . . . . . . . . . . . . . . 695.6.3 SGcontactStiffness() . . . . . . . . . . . . . . . . . . . . . . 705.6.4 SGdefineSynergies() . . . . . . . . . . . . . . . . . . . . . . 705.6.5 SGfingertips() . . . . . . . . . . . . . . . . . . . . . . . . . . 715.6.6 SGjointStiffness() . . . . . . . . . . . . . . . . . . . . . . . 715.6.7 SGmakeFinger() . . . . . . . . . . . . . . . . . . . . . . . . 725.6.8 SGmakeHand() . . . . . . . . . . . . . . . . . . . . . . . . . 725.6.9 SGmakeObject() . . . . . . . . . . . . . . . . . . . . . . . . 725.6.10 SGmoveHand() . . . . . . . . . . . . . . . . . . . . . . . . . 735.6.11 SGsynergyStiffness() . . . . . . . . . . . . . . . . . . . . . . 735.6.12 SGunblockjoints() . . . . . . . . . . . . . . . . . . . . . . . 745.6.13 SGwristStiffness() . . . . . . . . . . . . . . . . . . . . . . . 74
5.7 Sample hands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 765.7.1 SG3Fingered() . . . . . . . . . . . . . . . . . . . . . . . . . 765.7.2 SGDLRHandII() . . . . . . . . . . . . . . . . . . . . . . . . 765.7.3 SGhuman24() . . . . . . . . . . . . . . . . . . . . . . . . . . 775.7.4 SGmodularHand() . . . . . . . . . . . . . . . . . . . . . . . 77
CONTENTS 4
5.7.5 SGparadigmatic() . . . . . . . . . . . . . . . . . . . . . . . . 775.7.6 SGunderActuated1() . . . . . . . . . . . . . . . . . . . . . . 78
5.8 Utils . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 795.8.1 SGCFtau() . . . . . . . . . . . . . . . . . . . . . . . . . . . 795.8.2 SGcheckAngle() . . . . . . . . . . . . . . . . . . . . . . . . 795.8.3 SGcontactDetection() . . . . . . . . . . . . . . . . . . . . . . 805.8.4 SGcube() . . . . . . . . . . . . . . . . . . . . . . . . . . . . 805.8.5 SGcylinder() . . . . . . . . . . . . . . . . . . . . . . . . . . 815.8.6 SGDHMatrix() . . . . . . . . . . . . . . . . . . . . . . . . . 815.8.7 SGdrawCube() . . . . . . . . . . . . . . . . . . . . . . . . . 815.8.8 SGdrawCylinder() . . . . . . . . . . . . . . . . . . . . . . . 825.8.9 SGdrawPen() . . . . . . . . . . . . . . . . . . . . . . . . . . 825.8.10 SGdrawSphere() . . . . . . . . . . . . . . . . . . . . . . . . 825.8.11 SGfaceDetector() . . . . . . . . . . . . . . . . . . . . . . . . 825.8.12 SGgenerateCloud() . . . . . . . . . . . . . . . . . . . . . . . 835.8.13 SGgTildeMatrix() . . . . . . . . . . . . . . . . . . . . . . . . 835.8.14 SGhMatrix() . . . . . . . . . . . . . . . . . . . . . . . . . . 835.8.15 SGindexReduction() . . . . . . . . . . . . . . . . . . . . . . 835.8.16 SGintSegCube() . . . . . . . . . . . . . . . . . . . . . . . . 835.8.17 SGintSegCyl() . . . . . . . . . . . . . . . . . . . . . . . . . 845.8.18 SGintSegSph() . . . . . . . . . . . . . . . . . . . . . . . . . 845.8.19 SGisFinger() . . . . . . . . . . . . . . . . . . . . . . . . . . 845.8.20 SGisHand() . . . . . . . . . . . . . . . . . . . . . . . . . . . 845.8.21 SGisMatrix() . . . . . . . . . . . . . . . . . . . . . . . . . . 855.8.22 SGisObject() . . . . . . . . . . . . . . . . . . . . . . . . . . 855.8.23 SGisSeg() . . . . . . . . . . . . . . . . . . . . . . . . . . . . 855.8.24 SGisVector() . . . . . . . . . . . . . . . . . . . . . . . . . . 855.8.25 SGjoints() . . . . . . . . . . . . . . . . . . . . . . . . . . . . 865.8.26 SGlinkIntersection() . . . . . . . . . . . . . . . . . . . . . . 865.8.27 SGplotCube() . . . . . . . . . . . . . . . . . . . . . . . . . . 865.8.28 SGplotCylinder() . . . . . . . . . . . . . . . . . . . . . . . . 865.8.29 SGplotSeg() . . . . . . . . . . . . . . . . . . . . . . . . . . . 875.8.30 SGplotSolid() . . . . . . . . . . . . . . . . . . . . . . . . . . 875.8.31 SGplotSphere() . . . . . . . . . . . . . . . . . . . . . . . . . 875.8.32 SGpointInCube() . . . . . . . . . . . . . . . . . . . . . . . . 875.8.33 SGpointInCylinder() . . . . . . . . . . . . . . . . . . . . . . 885.8.34 SGpointInSphere() . . . . . . . . . . . . . . . . . . . . . . . 885.8.35 SGrotx() . . . . . . . . . . . . . . . . . . . . . . . . . . . . 885.8.36 SGroty() . . . . . . . . . . . . . . . . . . . . . . . . . . . . 895.8.37 SGrotz() . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 895.8.38 SGsantelloSynergies() . . . . . . . . . . . . . . . . . . . . . 895.8.39 SGsegment() . . . . . . . . . . . . . . . . . . . . . . . . . . 905.8.40 SGskew() . . . . . . . . . . . . . . . . . . . . . . . . . . . . 905.8.41 SGsphere() . . . . . . . . . . . . . . . . . . . . . . . . . . . 905.8.42 SGtransl() . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
CONTENTS 5
6 Conclusion 93
Chapter 1
Introduction
1.1 SummarySynGrasp is a MATLAB toolbox developed for the analysis of grasping, suitable bothfor robotic and human hands. It includes functions for the definition of hand kine-matic structure and of the contact points with a grasped object. The coupling betweenjoints induced by an underactuated control can be modeled. The hand modeling allowsto define compliance at the contact, joint and actuator levels. The provided analysisfunctions can be used to investigate the main grasp properties: controllable forces andobject displacement, manipulability analysis, grasp quality measures. Functions forthe graphical representation of the hand, the object and the main analysis results areprovided.
1.2 Related worksThe availability of tools for the analysis of hand grasping is useful to several researchtopics, ranging from ranging from anatomy [1] and neuroscience [2] to robotics [3].The control of the forces exerted at the contact points, planning of contact point po-sitioning and fine manipulation techniques have been largely studied in the last threedecades particularly concerning robotic hands.
Together with mathematical foundations of grasp theory [4] and many attempts torealize reliable robotic hands [5], simulation tools have been developed for the demon-stration of algorithms and techniques especially in grasp planning.
Syngrasp is mainly focused on grasp analysis. For a given hand and a given grasp,the software includes functions allowing the evaluation of the subspace of feasiblecontact forces, object motions. Furthermore, we included grasp properties evaluation,as for instance grasp quality measures, grasp stiffness, manipulability indexes and costfunctions [6].
Differently from other simulators, SynGrasp has been developed entirely in MAT-LAB, and offers an easy and intuitive script programming as well as a functional GUI.MATLAB is a programming environment for algorithm development, data analysis,
6

CHAPTER 1. INTRODUCTION 7
visualization, and numerical computation [7]. Specific toolboxes (i.e., collections ofdedicated MATLAB functions) have been developed in the past years as support forresearch and teaching in almost every branch of engineering, such as telecommunica-tions, electronics, aerospace, mechanics and control. As far as robotics is concerned,several toolboxes have been presented for the modelling and control of robot systems[8, 9, 10].
The main advantage of this programming environment is that it can be easily inte-grated with specific tools and built-in math functions enabling the exploration of multi-ple approaches and the integration with other analysis tools, e.g. statistical elaborationof experimental data, optimization, dynamic models and simulations etc..
The SynGrasp toolbox has been developed in the context of the EU Project “THE- The Hand Embodied” that aims to study how the embodied characteristics of thehuman hand and its sensors, the sensorimotor transformations, and the very constraintsthey impose, affect and determine the learning and control strategies we use for suchfundamental cognitive functions as exploring, grasping and manipulating [11]. For thisreason, the toolbox provides several functions for human and robot grasping evaluationincluding specific functions for human hand synergies evaluation [12, 13].
Other toolboxes were developed within the THE Consortium to cover different is-sues related to hand modeling and analysis. In particular, The Robotic Grasp Toolbox[14] and SynGrasp shares some function and some utilities, since they both were de-signed to deal with grasping evaluation of human hands and underactuated robotic handmodels.
1.3 ContactsThe Toolbox home page is athttp://SynGrasp.dii.unisi.itThis page will always list the current released version number as well as bug fixes andnew code in between major releases.
Users’ comments and questions are welcome and can be sent at the following emailaddress: [email protected]. Users’ contributions are welcome as well.
1.4 How to get the softwareThe SynGrasp Toolbox is freely available from the Toolbox home page athttp://SynGrasp.dii.unisi.itThe files are available in zip format (.zip).
The file SGguide.pdf is a comprehensive manual with a tutorial introduction anddetails of each Toolbox function.
1.5 Installation, Matlab version issuesThe Toolbox works with MATLAB version 6 and greater and has been tested on a PCwith version 6.
CHAPTER 1. INTRODUCTION 8
1.6 License and copyrightThe repository can be explored and its data can be used under the conditions of the:
Creative Commons Attribution Non Commercial 3.0 Unported License.Copyright (c) 2013, M. Malvezzi, G. Gioioso, G. Salvietti, D. Prattichizzo. All
rights reserved.Redistribution and use with or without modification, are permitted provided that
the following conditions are met:
• Redistributions of source code must retain the above copyright notice, this list ofconditions and the following disclaimer.
• Redistributions in binary form must reproduce the above copyright notice, thislist of conditions and the following disclaimer in the documentation and/or othermaterials provided with the distribution.
• Neither the name of the University of Siena nor the names of its contributorsmay be used to endorse or promote products derived from this software withoutspecific prior written permission.
This software is provided by M. Malvezzi, G. Gioioso, G. Salvietti, D. Prat-tichizzo, “as is” and any express or implied warranties, including, but not limitedto, the implied warranties of merchantability and fitness for a particular purposeare disclaimed. In no event shall M. Malvezzi, G. Gioioso, G. Salvietti, D. Prat-tichizzo be liable for any direct, indirect, incidental, special, exemplary, or conse-quential damages (including, but not limited to, procurement of substitute goodsor services, loss of use, data or profits; or business interruption) however causedand on any theory of liability, whether in contract, strict liability, or tort (includ-ing negligence or otherwise) arising in any way out of the use of this software, evenif advised of the possibility of such damage.
1.7 SupportThe authors are thankful to all the people providing genuine bugs or deficiencies in theToolbox, or who have suggestions about ways to improve its functionality. Users cancontact us writing at the following email addresssyngrasp diism.unisi.itIf you plan to duplicate this document for class use then every copy must include thefront page. If you want to cite the Toolbox please use
@article{MaGiSaPr-RAM15,Author = {Malvezzi, M. and Gioioso, G. and Salvietti, G. and Prattichizzo, D.},Title = {SynGrasp: A Matlab Toolbox for Underactuated and Compliant Hands},Journal = {Robotics Automation Magazine, IEEE},Volume = {in press},Number = {0},Year = {2015}
}
CHAPTER 1. INTRODUCTION 9
and
@inproceedings{malvezzi2013ICRA-syngrasp,title={SynGrasp: a MATLAB Toolbox for Grasp Analysisof Human and Robotic Hands},author={Malvezzi, M. and Gioioso, G. andSalvietti, G. and Prattichizzo, D. and Bicchi, A.},booktitle=ICRA,year={2013},address= {Karlsruhe, Germany}}
1.8 AcknowledgmentsThe research leading to this toolbox has received funding from
• the European Commission Collaborative Project 248587 and The Hand Embod-ied, within the FP7-ICT-2009-4-2-1 Program Cognitive Systems and Robotics;
• the Collaborative EU- Project Hands.dvi in the context of ECHORD (EuropeanClearing House for Open Robotics Development)
• the European Union Seventh Framework Programme FP7/2007- 2013 under grantagreement 601165 of the project WEARHAP;
• the Italian Ministry of Education, Universities and Research, Futuro in Ricerca2012 Programme, with the MODELACT project (Code RBFR12C608).
The authors would like to thank all the researchers and students that with their workcontribute to this toolbox.
Chapter 2
Overview of the toolbox
2.1 Toolbox organizationSynGrasp is based on the grasping model presented in [13], [15].
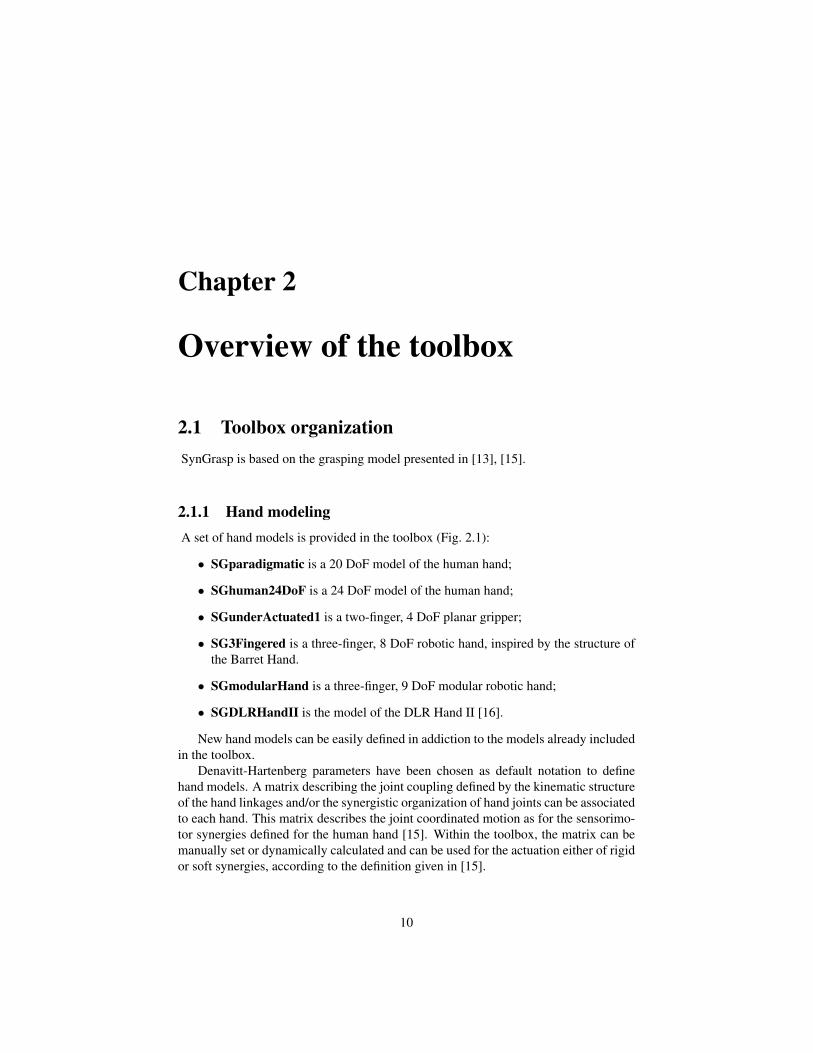
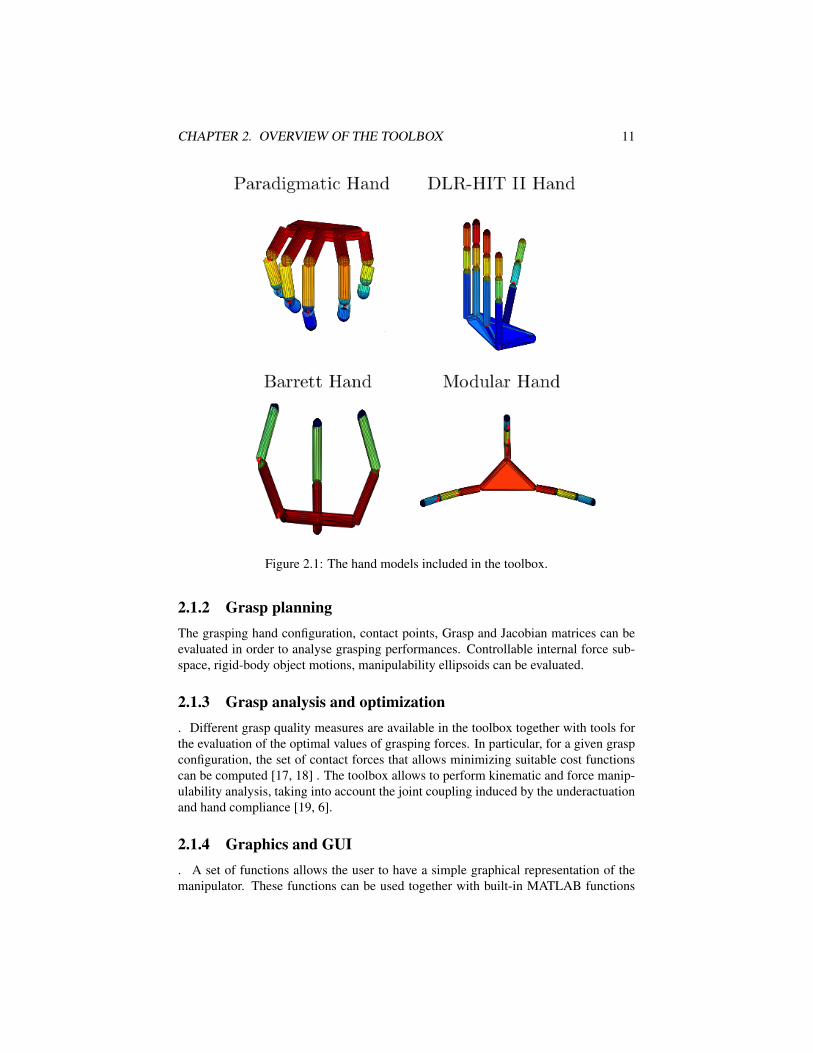
2.1.1 Hand modelingA set of hand models is provided in the toolbox (Fig. 2.1):
• SGparadigmatic is a 20 DoF model of the human hand;
• SGhuman24DoF is a 24 DoF model of the human hand;
• SGunderActuated1 is a two-finger, 4 DoF planar gripper;
• SG3Fingered is a three-finger, 8 DoF robotic hand, inspired by the structure ofthe Barret Hand.
• SGmodularHand is a three-finger, 9 DoF modular robotic hand;
• SGDLRHandII is the model of the DLR Hand II [16].
New hand models can be easily defined in addiction to the models already includedin the toolbox.
Denavitt-Hartenberg parameters have been chosen as default notation to definehand models. A matrix describing the joint coupling defined by the kinematic structureof the hand linkages and/or the synergistic organization of hand joints can be associatedto each hand. This matrix describes the joint coordinated motion as for the sensorimo-tor synergies defined for the human hand [15]. Within the toolbox, the matrix can bemanually set or dynamically calculated and can be used for the actuation either of rigidor soft synergies, according to the definition given in [15].
10
CHAPTER 2. OVERVIEW OF THE TOOLBOX 11
Figure 2.1: The hand models included in the toolbox.
2.1.2 Grasp planningThe grasping hand configuration, contact points, Grasp and Jacobian matrices can beevaluated in order to analyse grasping performances. Controllable internal force sub-space, rigid-body object motions, manipulability ellipsoids can be evaluated.
2.1.3 Grasp analysis and optimization. Different grasp quality measures are available in the toolbox together with tools forthe evaluation of the optimal values of grasping forces. In particular, for a given graspconfiguration, the set of contact forces that allows minimizing suitable cost functionscan be computed [17, 18] . The toolbox allows to perform kinematic and force manip-ulability analysis, taking into account the joint coupling induced by the underactuationand hand compliance [19, 6].
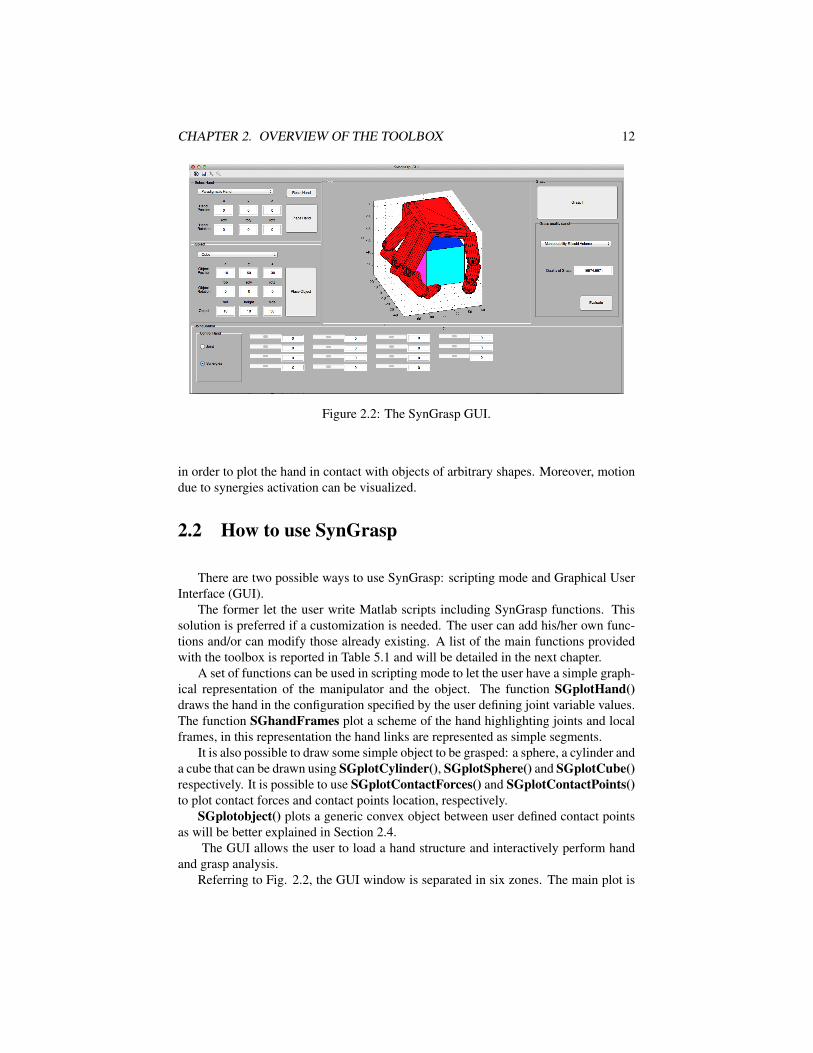
2.1.4 Graphics and GUI. A set of functions allows the user to have a simple graphical representation of themanipulator. These functions can be used together with built-in MATLAB functions
CHAPTER 2. OVERVIEW OF THE TOOLBOX 12
Figure 2.2: The SynGrasp GUI.
in order to plot the hand in contact with objects of arbitrary shapes. Moreover, motiondue to synergies activation can be visualized.
2.2 How to use SynGrasp
There are two possible ways to use SynGrasp: scripting mode and Graphical UserInterface (GUI).
The former let the user write Matlab scripts including SynGrasp functions. Thissolution is preferred if a customization is needed. The user can add his/her own func-tions and/or can modify those already existing. A list of the main functions providedwith the toolbox is reported in Table 5.1 and will be detailed in the next chapter.
A set of functions can be used in scripting mode to let the user have a simple graph-ical representation of the manipulator and the object. The function SGplotHand()draws the hand in the configuration specified by the user defining joint variable values.The function SGhandFrames plot a scheme of the hand highlighting joints and localframes, in this representation the hand links are represented as simple segments.
It is also possible to draw some simple object to be grasped: a sphere, a cylinder anda cube that can be drawn using SGplotCylinder(), SGplotSphere() and SGplotCube()respectively. It is possible to use SGplotContactForces() and SGplotContactPoints()to plot contact forces and contact points location, respectively.
SGplotobject() plots a generic convex object between user defined contact pointsas will be better explained in Section 2.4.
The GUI allows the user to load a hand structure and interactively perform handand grasp analysis.
Referring to Fig. 2.2, the GUI window is separated in six zones. The main plot is

CHAPTER 2. OVERVIEW OF THE TOOLBOX 13
placed on the center of the GUI window. On the left hand side there are two zones thattake care of placing on the main plot a hand model and an object model, respectively.It is possible to load either one of the available hand models or a hand model definedby the user.
Position and orientation of the hand models can be set and modified by the user.Concerning the object, at the moment it is possible to load simple objects such as asphere, a cube or a cylinder. It is possible to set and modify position, orientation andsize of the object. On the bottom zone, there is a set of sliders that can be used to mod-ify the hand model configuration. The sliders can control either each joint separatelyor can coordinately move the joints along a synergy direction. Synergies are alreadydefined for the human hand model as will be better explained in 2.3. For robotic hands,synergies can be defined directly by the user, derived from the linearization of the for-ward kinematic relationships, obtained from the processing of experimental data ormapped from the human hand as reported in Chapter 3.
The sliders can be used to bring the hand in contact with the object. A contact-detection algorithm allows to detect contact points on the hand model in order to per-form grasp analysis. To automatically close the hand around the object, the buttonplaced in the top-right part of the GUI can be used to perform a “close all” movementof the hand wrapping it around the object. On the bottom-right there is the area relatedto grasp analysis. Once the fingers are in contact with the object, either using the button“grasp” or moving the hand using the sliders, it is possible to analyse the quality of theobtained grasp. The desired quality index can be chosen form the drop-down menu.All the functions described in the following can be used in scripting mode. Most ofthem are also embedded on the GUI.
2.3 Hand Modelling
2.3.1 Hand structureThe hand structure is defined in terms of fingers, links and joints. A cell named base,containing as many elements as the number of fingers, collects in each cell elementa 4×4 matrix representing the homogeneous transformation matrix between the wristreference frame and a reference frame defined at the beginning of each finger kinematicchain.
Denavitt-Hartenberg (DH) parameters [20] have been chosen as default notation.A table containing the DH parameters of each finger has to be provided to describe ahand.
A cell named DHpars, which has as many elements as the number of fingers,collects in each element a matrix with four columns and as many rows as the numberof joints of each finger. Each row represents the DH parameters allowing to define thejoint with respect to the preceding one or with respect to the base reference frame.
For each hand finger, a structure is created with the function SGmakefinger, takingas input the 4×4 homogeneous matrix base, the dhpar matrix containing the DenavittHartenberg parameter table, and the vector q of joint variables. dhpar and q have asmany rows as the number of joints of the finger.
CHAPTER 2. OVERVIEW OF THE TOOLBOX 14
F = SGmakefinger(dhpar, base, q).Arguments:dhpar= n (number of joints) x 4 matrixcontaining DH parameters for each joint;base = 4 x 4 homogeneous transformationmatrix for the finger frame;q = n x 1 vector containing values ofjoint variables.
The function SGmakeHand() then defines a hand structure, whose arguments aredefined by the function SGmakeFinger().
hand = SGmakeHand(F)Arguments:F = array of finger structures definedby SGmakeFinger.
Hand configuration is defined by the joint variables q = [q1 · · · qnq ]T ∈ ℜnq . The
user can modify the hand configuration through the function SGmoveHand().
new_hand = SGmoveHand(hand,q)Arguments:hand = hand structure;q = joint values.
2.3.2 Hand joint couplingOne of the main features of the toolbox is that it can be used to investigate the proper-ties of hands in which the joint displacements are coupled, mechanically or by meansof a suitable control algorithm. In the case of human hand synergies, this coupling hasbeen described as a synergy matrix associated to hand model [13]. For the 20 DoFmodel of the human hand available in the toolbox, the synergy matrix refers to the datacollected by Santello et. al in [12] and it is provided through the function SGsantel-loSynergies. The function SGdefineSynergies() associates to a specific hand modelthe relative coupling matrix.
hand = SGdefineSynergies(hand,S)Arguments:hand = the hand structure on which theuser is defining the synergy matrixS = the synergy matrix
The function SGactivateSynergies() activates a synergy or a combination of synergieson the hand.
hand = SGactivateSynergies(hand,z)Arguments:hand = the hand on which the synergiesspecified in z must be activatedz = the synergy activation vector
CHAPTER 2. OVERVIEW OF THE TOOLBOX 15
The function SGplotSyn() draws the movement corresponding to the activation of onesynergy. It draws on the same plot the hand in the initial reference configuration and inthe configuration obtained activating one or more synergies.
SGplotSyn(hand,z,qm)Arguments:hand = the hand to movez = the synergy activation vectorqm (optional) = starting configuration(the current hand configuration by default)
2.4 Grasp Definition
The definition of an object and the contact point locations are fundamental forgrasp analysis. Object configuration is described by a frame {B} fixed to the objectwith respect to an inertial frame {N} fixed in the workspace. Let u ∈ ℜ6 denote thevector representing the position and orientation of {B} relative to {N}. Let nc be thenumber of contact points. In order to define the constraints and the contact forcesimposed by the contact between the hand and the object, a suitable contact model hasto be introduced [3]. For each contact point i, the contact model selects the contactforce λi ∈ℜli components, where li value depends on the type of contact (e.g., li=3 forhard finger model [3]).
Together with the contact type, to define a grasp it is needed:
• the location and orientation of the object frame {B} with respect to the wristframe {N};
• the contact points on the hand ch;
• the contact points on the object co;
• the directions normal to the contact surfaces on the contact points.
With SynGrasp these parameters can be defined in two ways. The user can directlyspecify the location of the contact points anywhere on the hand with the functionSGaddContact(), while can use SGaddFtipContact() if the contact point has to belocated on the fingertip.
new_hand = SGaddcontact(hand,type,cwhere,link,alpha)Arguments:hand = hand structuretype = type of contact
0 - single point without friction1 - hard finger2 - soft finger
cwhere = finger indexlink = link indexalpha = distance from the link ref origin

CHAPTER 2. OVERVIEW OF THE TOOLBOX 16
Given the contact points on the hand, it is possible to create a structure representing thegrasped object through the function SGmakeObject(). The structure for the graspedobject contains the object center, contact points and contact normal versors. Thesevalues can be either automatically computed by the software on the basis of the contactpoint locations or manually defined by the user. The function SGplotObject() can beused to plot a convex object defined by the given contact points. The user can choosethe fillet radius and the number of elements for object representation.
Although grasp synthesis is not the main focus of the toolbox, the second mannerto define a grasp in SynGrasp is using the provided grasp planner. The grasp plannerfunction SGgraspPlanner() takes as input the hand model, the object to be grasped,the number of pre-grasp positions and the metric to be used for grasp evaluation.
[hand_c,object,b_index] =SGgraspPlanner(hand,obj,N,qmtype)
Arguments:hand = the hand structureobj = the object structure to be graspedN = the number of random pregraspqmtype = the quality metric to be usedReturns:hand_c = the best hand configurationobject = the grasped objectb_index= the best quality index obtained
The function returns the best grasp obtained and the value of the index used for theevaluation. Additionally, it is possible to access to the whole list of grasps evaluatedand to their respective obtained index. In the following it is described the grasp plannerworking principle. The user can decide a number of possible pregrasp positions. Toobtain the pregrasp positions, the hand is initially moved using SGtransl() to the centerof the object with a random orientation of the palm. Then, the hand is moved along theoutgoing direction perpendicular to the palm of an offset computed through SGevalu-ateOffset() that depends on the object dimension and on the hand finger lengths. Theuser can eventually set a different distance from the object if needed. From the pregraspposition the hand is closed using SGcloseHand(). It is possible to set which joints areinvolved in the grasping action and the size of the step used to close the finger aroundthe object. The function SGcontactDetection() evaluates if the a link of the hand iscontact with the object and eventually stops the relative finger. Once all the fingers arein contact with the object or have reached the joint limits, the grasp quality is evaluated.All the computed index are sorted according to the quality index and the best grasp isreturned. In Fig. 2.3 an example of outcome of the grasp planner is reported.
Remark 1 In SynGrasp there are two possibilities to define a grasp. It is possible toconsider an object and close the hand on it to define the contact points or to considercontact points on the hand and define an object through them. This last solution canbe useful if contact point positions come from real experiments on an robotic or humanhand or if an external grasp planner is used.
Once the grasp is defined, it is possible to compute all the matrices relevant to graspanalysis. The evaluation of the selection matrix H, that extracts from the contact point
CHAPTER 2. OVERVIEW OF THE TOOLBOX 17
2040
6080
100120
−50
0
50
100
150
−150
−100
−50
0
50
x
y
z
−200
2040
6080
020
4060
80100
120
−80
−60
−40
−20
0
20
xy
z
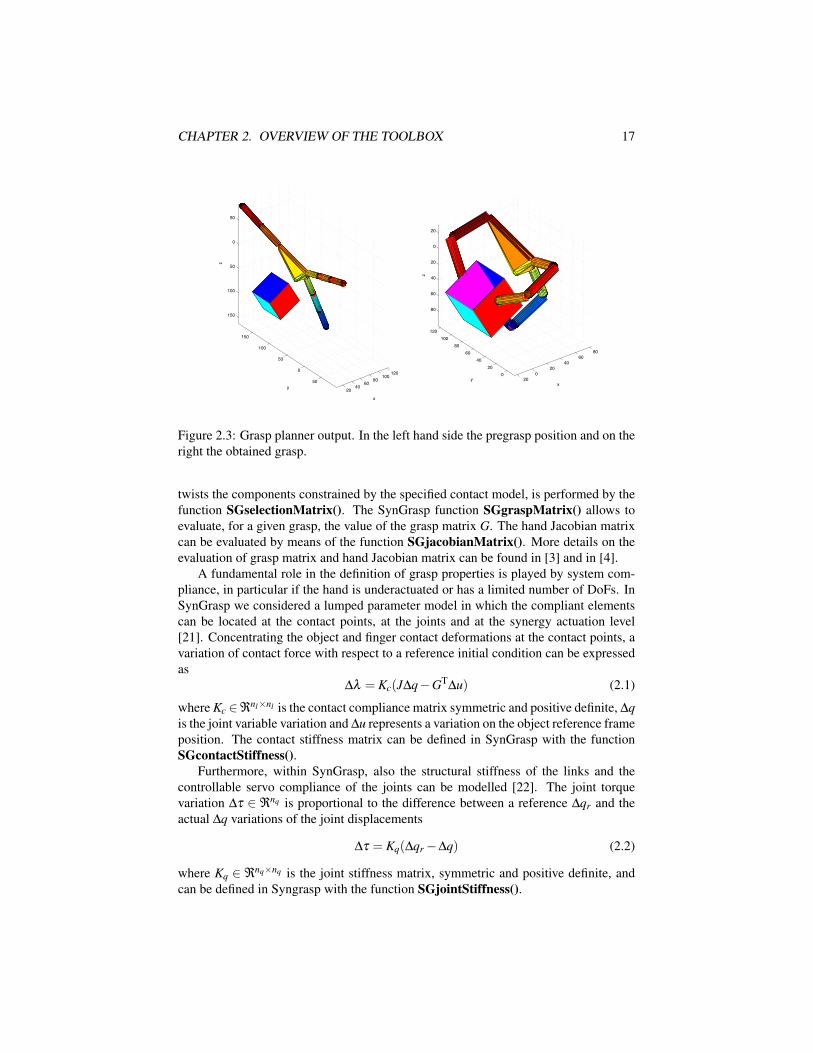
Figure 2.3: Grasp planner output. In the left hand side the pregrasp position and on theright the obtained grasp.
twists the components constrained by the specified contact model, is performed by thefunction SGselectionMatrix(). The SynGrasp function SGgraspMatrix() allows toevaluate, for a given grasp, the value of the grasp matrix G. The hand Jacobian matrixcan be evaluated by means of the function SGjacobianMatrix(). More details on theevaluation of grasp matrix and hand Jacobian matrix can be found in [3] and in [4].
A fundamental role in the definition of grasp properties is played by system com-pliance, in particular if the hand is underactuated or has a limited number of DoFs. InSynGrasp we considered a lumped parameter model in which the compliant elementscan be located at the contact points, at the joints and at the synergy actuation level[21]. Concentrating the object and finger contact deformations at the contact points, avariation of contact force with respect to a reference initial condition can be expressedas
∆λ = Kc(J∆q−GT∆u) (2.1)
where Kc ∈ℜnl×nl is the contact compliance matrix symmetric and positive definite, ∆qis the joint variable variation and ∆u represents a variation on the object reference frameposition. The contact stiffness matrix can be defined in SynGrasp with the functionSGcontactStiffness().
Furthermore, within SynGrasp, also the structural stiffness of the links and thecontrollable servo compliance of the joints can be modelled [22]. The joint torquevariation ∆τ ∈ ℜnq is proportional to the difference between a reference ∆qr and theactual ∆q variations of the joint displacements
∆τ = Kq(∆qr−∆q) (2.2)
where Kq ∈ ℜnq×nq is the joint stiffness matrix, symmetric and positive definite, andcan be defined in Syngrasp with the function SGjointStiffness().

CHAPTER 2. OVERVIEW OF THE TOOLBOX 18
Finally, SynGrasp is able to assume compliant model for the joint aggregation in-puts defined by synergies (referred as softly underactuated model in [15])
∆σ = Kz(∆zr−∆z) (2.3)
where Kz ∈ℜnz×nz is a symmetric and positive definite matrix that defines the synergystiffness. Within SynGrasp, the synergy stiffness matrix by SGsynergyStiffness().
2.5 Grasp analysisGrasp analysis is the most important feature of SynGrasp. The functions included arethe results of different studies on both fully and underactuated hand models, consider-ing compliance at different levels. In this section we report the main results obtainedconsidering a synergy actuated human hand model. The quasi–static model adoptedto define the main properties of a grasp is obtained by performing a linear approxi-mation of the kinematic and compliance equations in the neighbour of an initial staticequilibrium configuration. More details of this model can be found in [13], [15], and[6]. Starting from an equilibrium configuration and applying a small variation to theinput synergy reference values ∆zr, in the hypotheses that the system reaches a newequilibrium configuration, the following linear equations hold
−G 0 0 0 0 0JT 0 0 −I 0 00 0 0 ST −I 0I KcGT −KcJ 0 0 00 0 Kq I 0 −KqS0 0 0 0 I Kz
∆λ
∆u∆q∆τ
∆σ
∆z
=
00000
Kz∆zr0
. (2.4)
The solution of this linear system leads to the following mapping between the inputcontrolled variable, i.e. the synergy reference variation ∆zr, and the output variables
∆u = V ∆zr (2.5)∆q = XSY ∆zr = Qδ zr (2.6)∆z = Y ∆zr (2.7)
∆λ = P∆zr (2.8)
where the transfer matrices V , Q, Y and P depend on grasp characteristics.SynGrasp function SGquasistatic() solves the linear system in eq. (2.4) for a given
grasp and for a given variation of reference synergy values, and evaluates the corre-sponding variation of grasp configuration, according to eq. (2.5)-(2.8). It uses the func-tion SGquasistaticMaps(), that evaluates the matrices mapping the input variation ∆zrto the outputs.
linMaps = SGquasistaticMaps(hand,object)Arguments:hand = the hand structureobject = the object structureReturns:

CHAPTER 2. OVERVIEW OF THE TOOLBOX 19
linMaps.V = object motionlinMaps.P = contact forceslinMaps.Q = hand joint displacementslinMaps.T = joint torqueslinMaps.Y = synergy actual values
From eq. (2.8), a basis matrix Es for the subspace of controllable internal forces,i.e. the internal forces ∆λ that can be produced by activating the synergy references∆zr [13], can be defined as
Es = R (P) (2.9)
All internal forces controllable by synergy actions can then be parametrized through afree vector y ∈ℜnh as ∆λ = Esy, where nh represents the dimension of the controllableinternal force subspace [4].
SynGrasp function SGgraspAnalysis() analyses the given grasping configurationin terms of internal forces and object motions.
[E] = SGgraspAnalysis(grasp)Returns:E = matrix of controllable internal forcesArguments:grasp = the hand to analyse
Eq. (2.5) shows how the object displacements ∆u are controlled from one equilib-rium configuration to another by synergy small variations ∆zr. Among all the possibleobject motions, rigid-body motions are those that do not involve visco-elastic defor-mations in the contact points. Rigid-body motions controllable by synergies has to becompatible with contact constraint (2.1) and with eq. (2.6), which relates controlledpostural synergies and joint displacements. The synergy reference values that modifyhand and object configuration without modifying the contact force values belong tothe P matrix nullspace, i.e. ∆zrh ∈N (P). The corresponding object displacement andhand configuration variation, according to eq. (2.5) and (2.6) are given by ∆uh =V ∆zrhand ∆qh = Q∆zrh, respectively. SynGrasp function SGrbMotions() evaluates, for agiven grasp configuration, the subspace of hand and object rigid body motions.
Remark 2 When the hand structure is generated, if not specifically defined, the S ma-trix is set to an identity matrix I ∈ℜnq×nq . This corresponds to a fully actuated hand, inwhich each component of q vector can be controlled. All the grasp analysis functionscan be thus used for fully actuated hands.
The manipulability analysis, proposed in [23, 19, 24] is widely common in roboticsto analyze the robot performance in the task space. Recently, in [6] it has been extendedto synergy actuated hands, including the effect of system compliance. Manipulabilityallows to investigate how a unitary variation in the input space is reproduced in the taskspace. The kinematic manipulability index, in terms of differential motions, is definedas the ratio of a measure of performance in the task space and a measure of effort inthe input (synergies in this case) space
Rk =∆uTWu∆u∆zTWz,∆z
, (2.10)
CHAPTER 2. OVERVIEW OF THE TOOLBOX 20
−40−20
020 0
2040
6080
100
−80
−60
−40
−20
0
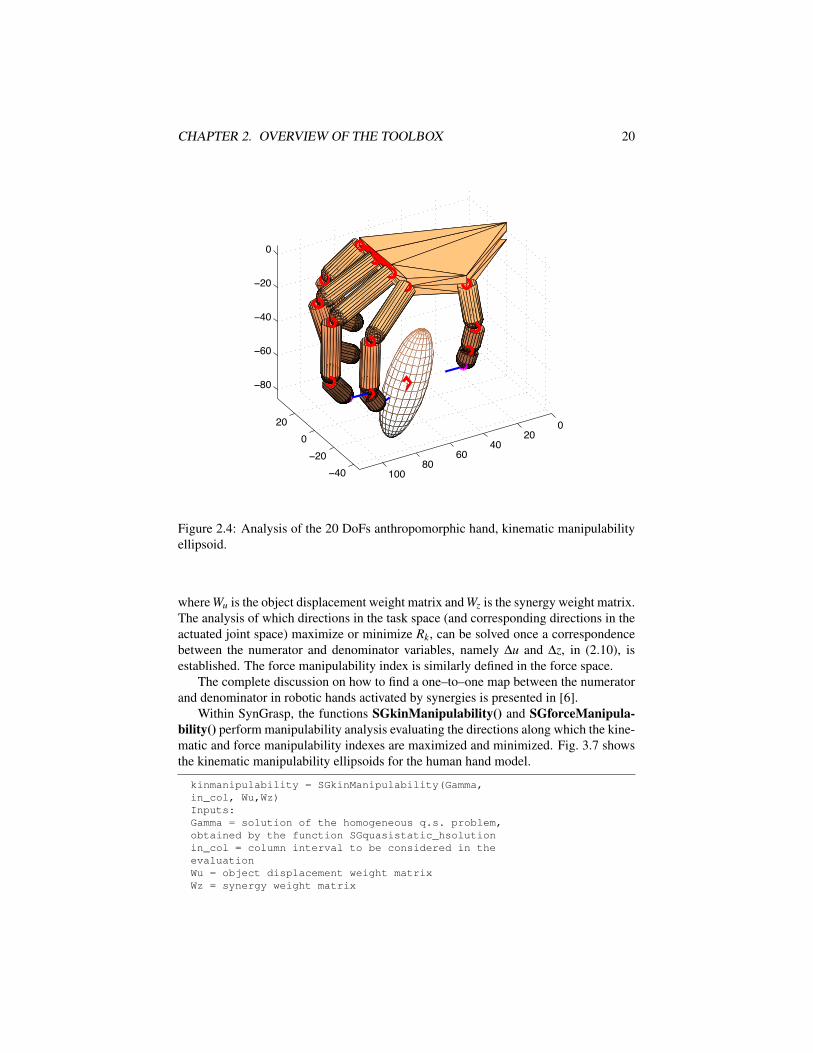
Figure 2.4: Analysis of the 20 DoFs anthropomorphic hand, kinematic manipulabilityellipsoid.
where Wu is the object displacement weight matrix and Wz is the synergy weight matrix.The analysis of which directions in the task space (and corresponding directions in theactuated joint space) maximize or minimize Rk, can be solved once a correspondencebetween the numerator and denominator variables, namely ∆u and ∆z, in (2.10), isestablished. The force manipulability index is similarly defined in the force space.
The complete discussion on how to find a one–to–one map between the numeratorand denominator in robotic hands activated by synergies is presented in [6].
Within SynGrasp, the functions SGkinManipulability() and SGforceManipula-bility() perform manipulability analysis evaluating the directions along which the kine-matic and force manipulability indexes are maximized and minimized. Fig. 3.7 showsthe kinematic manipulability ellipsoids for the human hand model.
kinmanipulability = SGkinManipulability(Gamma,in_col, Wu,Wz)Inputs:Gamma = solution of the homogeneous q.s. problem,obtained by the function SGquasistatic_hsolutionin_col = column interval to be considered in theevaluationWu = object displacement weight matrixWz = synergy weight matrix

CHAPTER 2. OVERVIEW OF THE TOOLBOX 21
Returns:kinmanipulability = structure containing thedirections in the x, z and u spaces, thatmaximizes/minimizes kinematic manipulabilityindex
The input for the function is a matrix that represents the solution of the quasi–staticlinear homogeneous system discussed in [6], and can be evaluated with the functionSGquasistaticHsolution().
Gamma = SGquasistaticHsolution(hand, object)Inputs: hand and object structures defined bySGmakehand and SGmakeobjectReturns:Gamma = structure containing homogeneoussolution of quasistatic problem and itspartition
In order to assure grasp stability, avoiding contact losses and slippage, the ratiobetween the tangential and normal component of each contact force has to be lowerthan the friction coefficient, that depends on contact surface properties. Within thissubset, the vector of linear coefficient y can be chosen in order to optimize some costfunctions. In [17] an efficient algorithm to find the internal force set, maximizing thedistance from the friction limit boundary, has been provided. In [25] the algorithmwas furthermore generalized for tendinous actuated hands. In [15] the algorithm wasadopted to analyze the role of synergies in the choice of grasp forces in the humanhand. Analytically the problem consists in the minimization of a cost function V (y)that depends on the contact forces and on the contact properties (friction coefficient,contact surface geometry). The SynGrasp function SGVcost() evaluates, for a givengrasp configuration and applied force, the corresponding value of the cost functionV (y).
cost = SGVcost(w,y,pG,E,n,mu, fmin,fmax,k)Inputs:w =external loadpG =grasp matrix pseudoinverseE =controllable internal force subspacen =contact normal (matrix 3xnc)alpha =cosine of the friction anglefmin =minimum normal componentfmax =maximum contact force normk =positive marginReturns: cost = cost function value
This cost function can be minimized adopting standard Matlab functions, e.g. fmin-search(). The utility function SGcheckAngle() evaluates, for each contact point, theangle between the contact normal unity vector ni and the contact force λi. The utilityfunction SGcheckFriction() evaluates, for a given grasp configuration, if the frictionconstraints are satisfied or not.
The SynGrasp function SGCFtau(), in a similar way, evaluates a cost function thattakes into account the torque applied on hand joints. The value of y that minimizes this

CHAPTER 2. OVERVIEW OF THE TOOLBOX 22
function corresponds to the set of internal forces that minimize the hand joint effort[18].
Other functions widely described in the literature, are available in SynGrasp todefine grasp quality [26]. SGminSVG() evaluates the minimum singular value of Gmatrix: the smallest singular value of the G matrix is a quality measure that indicateshow far is the grasp configuration from falling into a singular configuration [3, 27]. SG-manipEllisoidVolume() evaluates the hand manipulability ellipsoid [28]. In order tokeep redundant fingers far from singular configurations, it is desirable to maximize thesmallest singular value of grasp Jacobian matrix Ho=G+J [29]. SGdistSingularCon-figuration() evaluates the minimum singular value of Ho matrix. The transformationbetween the velocity domain in the finger joints and the velocity domain of the objectcan be qualitatively considered “uniform” when the contribution of each joint velocityis the same in all the components of object velocity. In the literature, this uniformitymeasure is evaluated as the ratio between the minimum and maximum singular valueof matrix Ho [30], the function SGunifTransf() allows computing such parameter. Fi-nally, SGgraspIsotropyIndex() looks for an uniform contribution of the contact forcesto the total wrench exerted on the object, i.e. tries to obtain an isotropic grasp wherethe magnitudes of the internal forces are similar [31].

Chapter 3
Tutorial and examples
In this section we describe in detail four of the examples available within the SynGrasptoolbox. The first example involves the human hand model. The analysis of the humanhand during a writing task is proposed. The task performance is evaluated in terms ofkinematic manipulability index. In the second example, we report how SynGrasp canbe used to map human hand synergies onto robotic hands. In literature there are severalexamples where the synergies for a robotic hand are defined considering PCA analysisover a set of grasps obtained closing the hand on a set of objects, see for instance [32],[33]. In [34] we proposed an object-based approach to map human hand synergies ontorobotics hands with dissimilar kinematics. Using this mapping algorithm is possible todefine the synergistic motion of a robotic hand without testing or simulating differentgrasps for different objects. In the Section 3.4 the main step of the algorithm as wellas its implementation using SynGrasp are presented. The third example deals with themodeling and analysis of underactuated robotic hands. Two cases are presented: in thefirst the underactuation is realized with a pulley-tendon system, while in the secondthe hand joints are mechanically coupled. In both cases the hand presents active andpassive DoFs. In the last example we show how to use the grasp planner included inthe toolbox.
The main target of the proposed examples is to show the versatility of the toolbox.SynGrasp can be used: outside the robotic context to evaluate human hand tasks; toreplicate some capability of the human hand onto robotic hands; to model complexrobotic hand and to test them in grasping and manipulation tasks.
3.1 A first example with the paradigmatic hand
3.1.1 How to define a handIn this section we will show the structure of the file SGparadigmatic, that definesthe structure of an anthropomorphic hand with 20 DoFs. The same steps have to befollowed for the definition of a generic hand model
1. First, assign a name to the hand and define a function, for example, for the 20
23

CHAPTER 3. TUTORIAL AND EXAMPLES 24
DoFs paradigmatic hand
function newHand = SGparadigmatic(T)
2. Pre-allocation of the variables: this is a simple step, in which we have only toset the right dimensions of some cell arrays variables, that is the number of handfingers, five in this example
%%% Pre-allocationDHpars{5} = [];base{5} = [];F{5} = [];
3. Then, for each finger, we have to define the table of Denavit Hartenberg pa-rameters and the homogeneous matrix describing the position and orientation ofthe frames that identify the beginning of each finger’s kinematic chain. For thethumb of the 20 DoF paradigmatic hand we have, for example
DHpars{1}=[-pi/2 0 0 0 ;0 25 0 0 ;pi/2 15 0 0 ;0 10 0 0 ];
base{1} = [0 -1 0 -37;1 0 0 45;0 0 1 00 0 0 1];
4. Then the above specified variables are collected in an array of cells F{i} with thefunction SGmakeFinger. This set of operations is the same for all the hands.
for i = 1:length(DHpars)% number of joints for each fingerjoints = size(DHpars{i},2);% initialize joint variablesq = zeros(joints,1);% make the fingerif (nargin == 1)
F{i} = SGmakeFinger(DHpars{i},T*base{i},q);else
F{i} = SGmakeFinger(DHpars{i},base{i},q);end
end
5. Finally a structure variable hand is defined, containing all the data necessary tobuild the hand
newHand = SGmakeHand(F);newHand.type = ’Paradigmatic’;

CHAPTER 3. TUTORIAL AND EXAMPLES 25
Note: Practically the user has to modify only the point 1, specifying the name ofthe hand (when the hand is saved, recall that the name of the function has to bethe same of the file .m in which it is saved), 2, specifying the number of fingers inthe hand, and 3, defining the geometric parameters of the hand.
3.1.2 How to load a hand modelWe can load a hand model simply recalling the function that defines it and assigning avariable to it, for example
hand = SGparadigmatic;
This call of the hand definition function, SGparadigmatic in this case, assign to thevariable hand a structure defined as follows
F: {[1x1 struct] [1x1 struct] [1x1 struct][1x1 struct] [1x1 struct]}n: 5m: 20q: [20x1 double]
qin: [20x1 double]qinf: [20x1 double]ctype: 1ftips: [3x5 double]
S: [20x20 double]cp: []Kq: [20x20 double]Kz: [20x20 double]H: []J: []JS: []Wr: [6x1 double]Kw: [6x6 double]
limit: [20x2 double]active: [20x1 double]type: ’Paradigmatic’
The hand can be represented using the function SGplothand()
figure(1)SGplotHand(hand);axis(’equal’)
That gives the plot represented in Fig. 3.1.Then hand joints can be moved with the function SGmoveHand(hand,qm), that
assign to the field hand.q the values in the vector qm
hand = SGmoveHand(hand,qm)
This function can be adopted to move the hand to any desired configuration, as shown,for instance, in Fig. 3.2.
CHAPTER 3. TUTORIAL AND EXAMPLES 26
−40−30
−20−10
010
20
60
80
100
120
140
160
−505
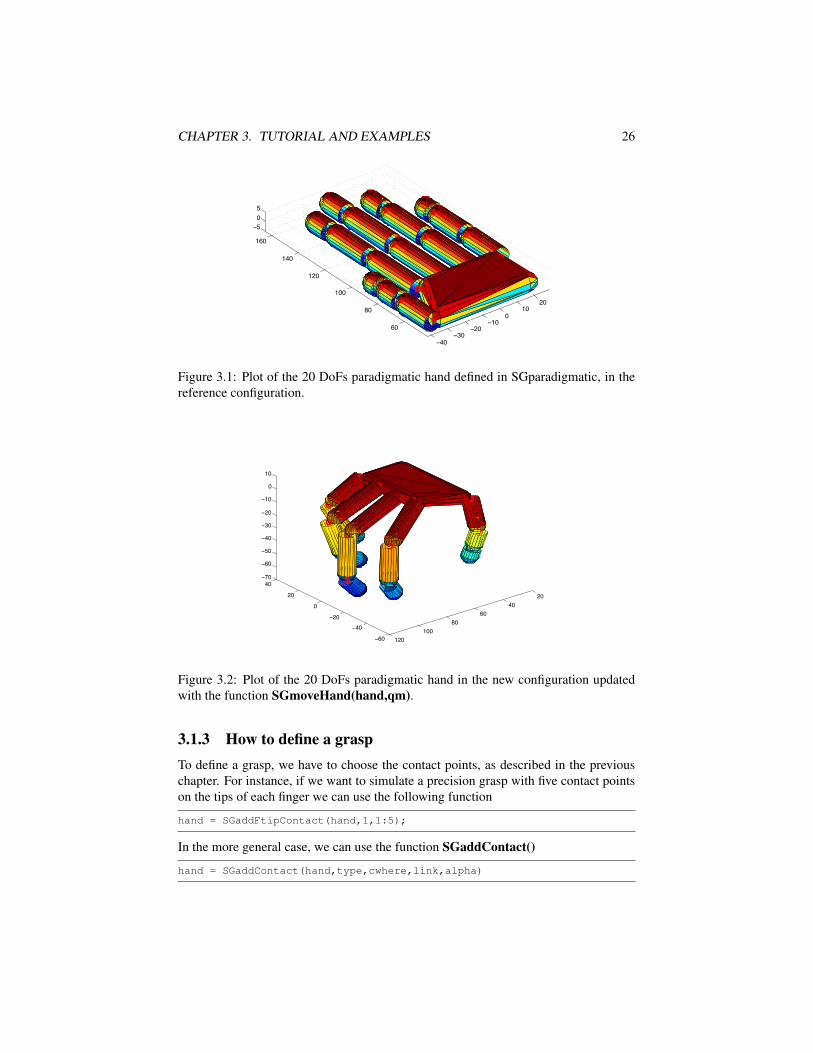
Figure 3.1: Plot of the 20 DoFs paradigmatic hand defined in SGparadigmatic, in thereference configuration.
−60
−40−20
0
20
40
2040
6080
100120
−70
−60
−50
−40
−30
−20
−10
0
10
Figure 3.2: Plot of the 20 DoFs paradigmatic hand in the new configuration updatedwith the function SGmoveHand(hand,qm).
3.1.3 How to define a graspTo define a grasp, we have to choose the contact points, as described in the previouschapter. For instance, if we want to simulate a precision grasp with five contact pointson the tips of each finger we can use the following function
hand = SGaddFtipContact(hand,1,1:5);
In the more general case, we can use the function SGaddContact()
hand = SGaddContact(hand,type,cwhere,link,alpha)
CHAPTER 3. TUTORIAL AND EXAMPLES 27
These functions update the hand structure with a field hand.cp containing the contactpoints
>> hand.cp
ans =
-36.4407 -35.0187 -8.0000 9.8970 23.277946.4724 95.6175 97.8886 81.3687 71.7627-48.7886 -58.4436 -67.1074 -55.7294 -46.66251.0000 2.0000 3.0000 4.0000 5.00004.0000 4.0000 4.0000 4.0000 4.00001.0000 1.0000 1.0000 1.0000 1.00001.0000 1.0000 1.0000 1.0000 1.0000
As we can observe, hand.cp is a matrix with seven rows and a number of columnsequal to the contact points. The first three rows of the matrix contain contact pointcoordinates, the fourth one contains an index corresponding to the finger where thecontact is, the fifth contains an index representing the link of each finger, where thecontact is, the sixth row specifies the contact type (1 for a hard finger contact model, 2for a soft finger contact model).
Once the contact points are defined, a second structure object can be defined
>> [hand,object] = SGmakeObject(hand);>> object
object =
cp: [4x5 double]center: [3x1 double]normals: [3x5 double]
base: [4x4 double]Kc: [15x15 double]H: [15x30 double]
Gtilde: [6x30 double]G: [6x15 double]
type: ’auto’
This function update the structure hand with the computation of hand Jacobian matrixand creates a new structure object in which the main parameters of the object for graspanalysis are collected. A schematic representation of the object can be obtained withthe function SGplotObject, see Fig. 3.3.
SGplotObject(object);
3.1.4 SummaryThe above described steps are those necessary to define a hand and a grasp and are thebase for the following studies. In the following, we will describe some examples ofanalysis.
CHAPTER 3. TUTORIAL AND EXAMPLES 28
−40−20
0
20 4060
80100
−60
−50
−40
−30
−20
−10
0
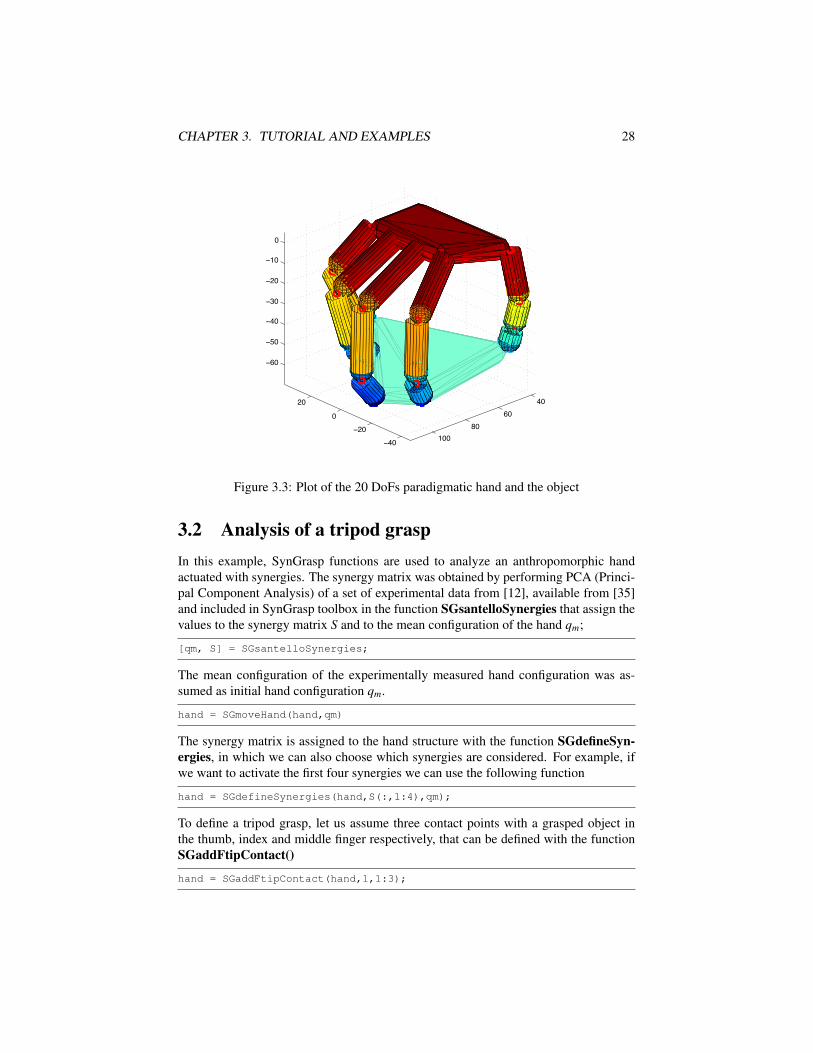
Figure 3.3: Plot of the 20 DoFs paradigmatic hand and the object
3.2 Analysis of a tripod graspIn this example, SynGrasp functions are used to analyze an anthropomorphic handactuated with synergies. The synergy matrix was obtained by performing PCA (Princi-pal Component Analysis) of a set of experimental data from [12], available from [35]and included in SynGrasp toolbox in the function SGsantelloSynergies that assign thevalues to the synergy matrix S and to the mean configuration of the hand qm;
[qm, S] = SGsantelloSynergies;
The mean configuration of the experimentally measured hand configuration was as-sumed as initial hand configuration qm.
hand = SGmoveHand(hand,qm)
The synergy matrix is assigned to the hand structure with the function SGdefineSyn-ergies, in which we can also choose which synergies are considered. For example, ifwe want to activate the first four synergies we can use the following function
hand = SGdefineSynergies(hand,S(:,1:4),qm);
To define a tripod grasp, let us assume three contact points with a grasped object inthe thumb, index and middle finger respectively, that can be defined with the functionSGaddFtipContact()
hand = SGaddFtipContact(hand,1,1:3);
CHAPTER 3. TUTORIAL AND EXAMPLES 29
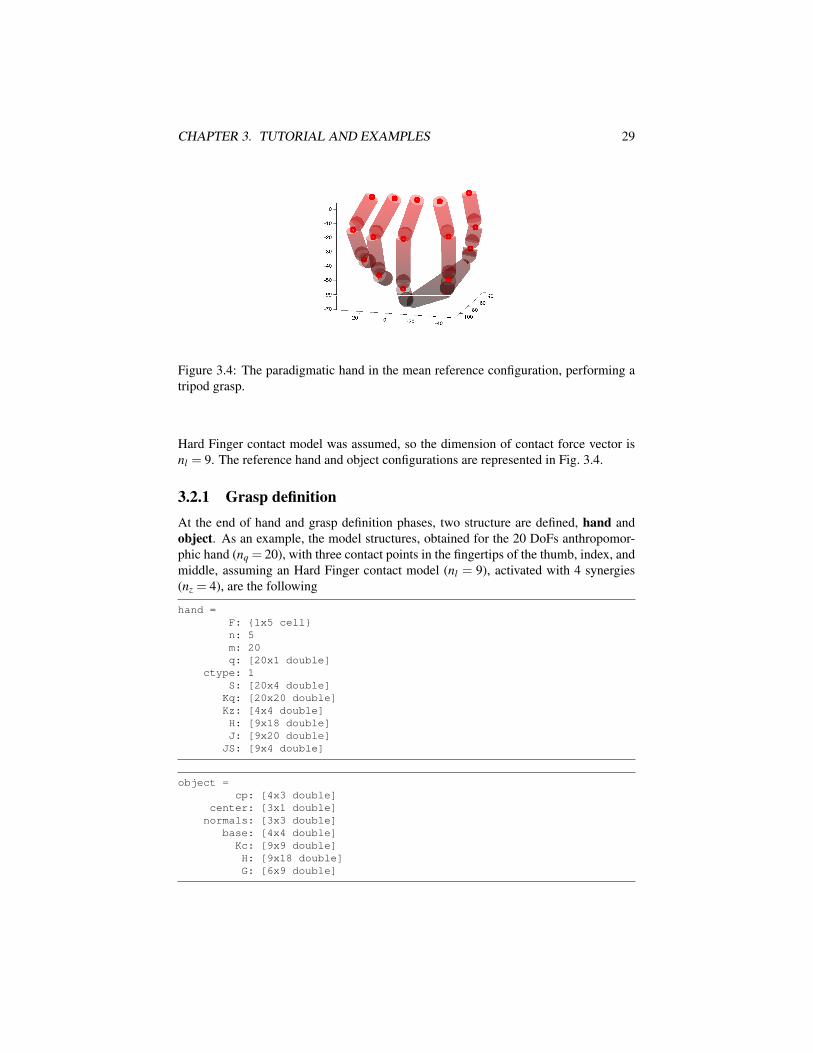
Figure 3.4: The paradigmatic hand in the mean reference configuration, performing atripod grasp.
Hard Finger contact model was assumed, so the dimension of contact force vector isnl = 9. The reference hand and object configurations are represented in Fig. 3.4.
3.2.1 Grasp definitionAt the end of hand and grasp definition phases, two structure are defined, hand andobject. As an example, the model structures, obtained for the 20 DoFs anthropomor-phic hand (nq = 20), with three contact points in the fingertips of the thumb, index, andmiddle, assuming an Hard Finger contact model (nl = 9), activated with 4 synergies(nz = 4), are the following
hand =F: {1x5 cell}n: 5m: 20q: [20x1 double]
ctype: 1S: [20x4 double]Kq: [20x20 double]Kz: [4x4 double]H: [9x18 double]J: [9x20 double]JS: [9x4 double]
object =cp: [4x3 double]
center: [3x1 double]normals: [3x3 double]
base: [4x4 double]Kc: [9x9 double]H: [9x18 double]G: [6x9 double]
CHAPTER 3. TUTORIAL AND EXAMPLES 30
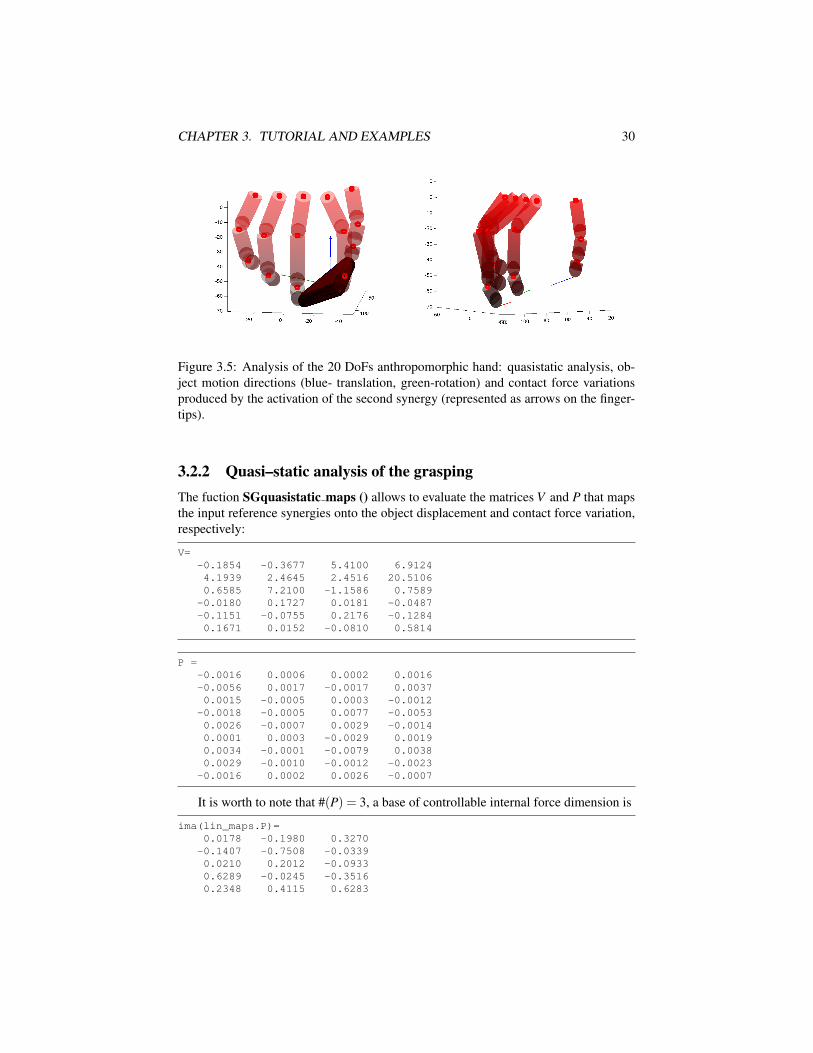
Figure 3.5: Analysis of the 20 DoFs anthropomorphic hand: quasistatic analysis, ob-ject motion directions (blue- translation, green-rotation) and contact force variationsproduced by the activation of the second synergy (represented as arrows on the finger-tips).
3.2.2 Quasi–static analysis of the graspingThe fuction SGquasistatic maps () allows to evaluate the matrices V and P that mapsthe input reference synergies onto the object displacement and contact force variation,respectively:
V=-0.1854 -0.3677 5.4100 6.91244.1939 2.4645 2.4516 20.51060.6585 7.2100 -1.1586 0.7589-0.0180 0.1727 0.0181 -0.0487-0.1151 -0.0755 0.2176 -0.12840.1671 0.0152 -0.0810 0.5814
P =-0.0016 0.0006 0.0002 0.0016-0.0056 0.0017 -0.0017 0.00370.0015 -0.0005 0.0003 -0.0012-0.0018 -0.0005 0.0077 -0.00530.0026 -0.0007 0.0029 -0.00140.0001 0.0003 -0.0029 0.00190.0034 -0.0001 -0.0079 0.00380.0029 -0.0010 -0.0012 -0.0023-0.0016 0.0002 0.0026 -0.0007
It is worth to note that #(P) = 3, a base of controllable internal force dimension is
ima(lin_maps.P)=0.0178 -0.1980 0.3270-0.1407 -0.7508 -0.03390.0210 0.2012 -0.09330.6289 -0.0245 -0.35160.2348 0.4115 0.6283
CHAPTER 3. TUTORIAL AND EXAMPLES 31
-0.2358 -0.0698 -0.0107-0.6467 0.2224 0.0246-0.0942 0.3392 -0.59440.2148 -0.1315 0.1040
3.2.3 Rigid body motionsThe function SGrb motions() applied to the hand and object produces in this case thefollowing result.
rbmotion =Zrb: [4x1 double]Urb: [6x1 double]Qrb: [20x1 double]
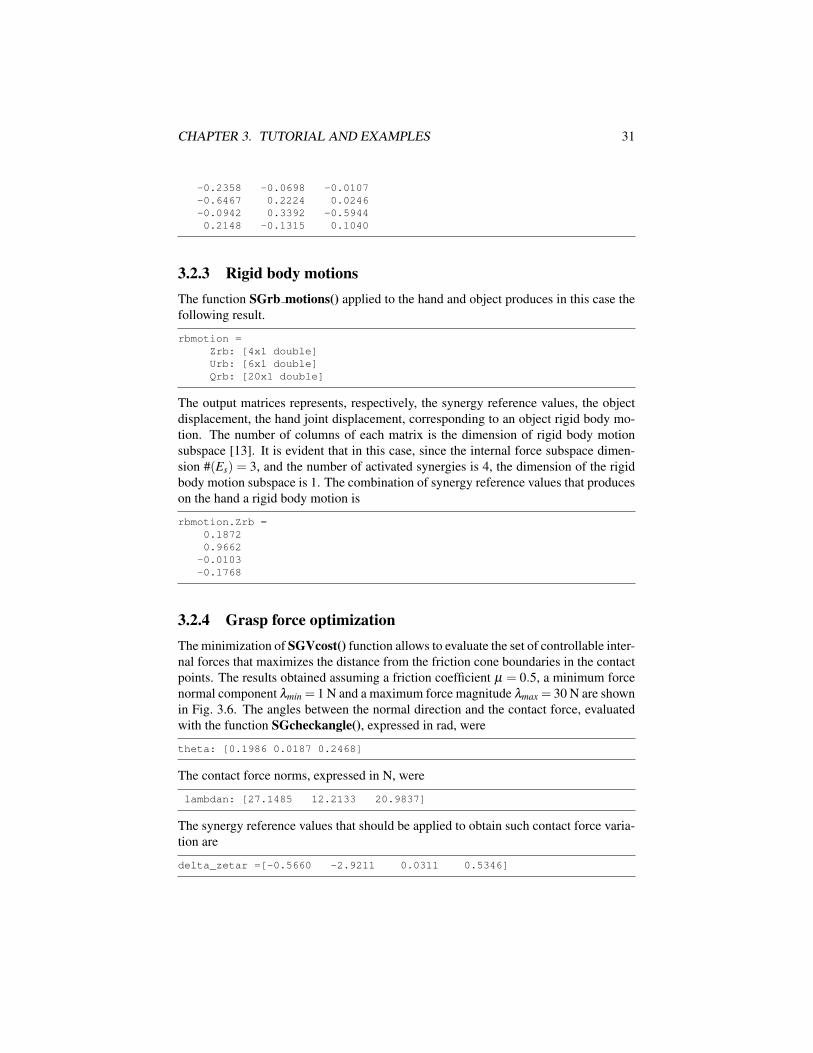
The output matrices represents, respectively, the synergy reference values, the objectdisplacement, the hand joint displacement, corresponding to an object rigid body mo-tion. The number of columns of each matrix is the dimension of rigid body motionsubspace [13]. It is evident that in this case, since the internal force subspace dimen-sion #(Es) = 3, and the number of activated synergies is 4, the dimension of the rigidbody motion subspace is 1. The combination of synergy reference values that produceson the hand a rigid body motion is
rbmotion.Zrb =0.18720.9662-0.0103-0.1768
3.2.4 Grasp force optimizationThe minimization of SGVcost() function allows to evaluate the set of controllable inter-nal forces that maximizes the distance from the friction cone boundaries in the contactpoints. The results obtained assuming a friction coefficient µ = 0.5, a minimum forcenormal component λmin = 1 N and a maximum force magnitude λmax = 30 N are shownin Fig. 3.6. The angles between the normal direction and the contact force, evaluatedwith the function SGcheckangle(), expressed in rad, were
theta: [0.1986 0.0187 0.2468]
The contact force norms, expressed in N, were
lambdan: [27.1485 12.2133 20.9837]
The synergy reference values that should be applied to obtain such contact force varia-tion are
delta_zetar =[-0.5660 -2.9211 0.0311 0.5346]
CHAPTER 3. TUTORIAL AND EXAMPLES 32
−60−40
−200 50
6070
8090
−80
−70
−60
−50
−40
−30
y (mm)x (mm)
z (m
m)
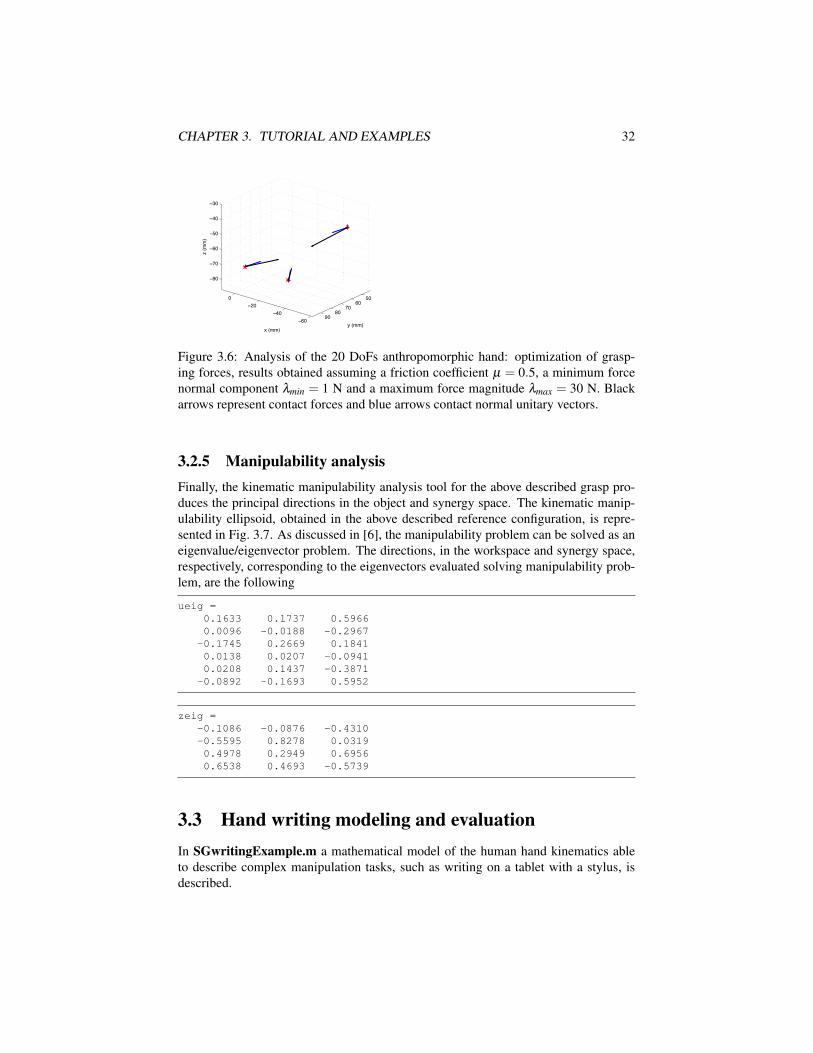
Figure 3.6: Analysis of the 20 DoFs anthropomorphic hand: optimization of grasp-ing forces, results obtained assuming a friction coefficient µ = 0.5, a minimum forcenormal component λmin = 1 N and a maximum force magnitude λmax = 30 N. Blackarrows represent contact forces and blue arrows contact normal unitary vectors.
3.2.5 Manipulability analysisFinally, the kinematic manipulability analysis tool for the above described grasp pro-duces the principal directions in the object and synergy space. The kinematic manip-ulability ellipsoid, obtained in the above described reference configuration, is repre-sented in Fig. 3.7. As discussed in [6], the manipulability problem can be solved as aneigenvalue/eigenvector problem. The directions, in the workspace and synergy space,respectively, corresponding to the eigenvectors evaluated solving manipulability prob-lem, are the following
ueig =0.1633 0.1737 0.59660.0096 -0.0188 -0.2967-0.1745 0.2669 0.18410.0138 0.0207 -0.09410.0208 0.1437 -0.3871-0.0892 -0.1693 0.5952
zeig =-0.1086 -0.0876 -0.4310-0.5595 0.8278 0.03190.4978 0.2949 0.69560.6538 0.4693 -0.5739
3.3 Hand writing modeling and evaluationIn SGwritingExample.m a mathematical model of the human hand kinematics ableto describe complex manipulation tasks, such as writing on a tablet with a stylus, isdescribed.
CHAPTER 3. TUTORIAL AND EXAMPLES 33
−40−20
020 0
2040
6080
100
−80
−60
−40
−20
0
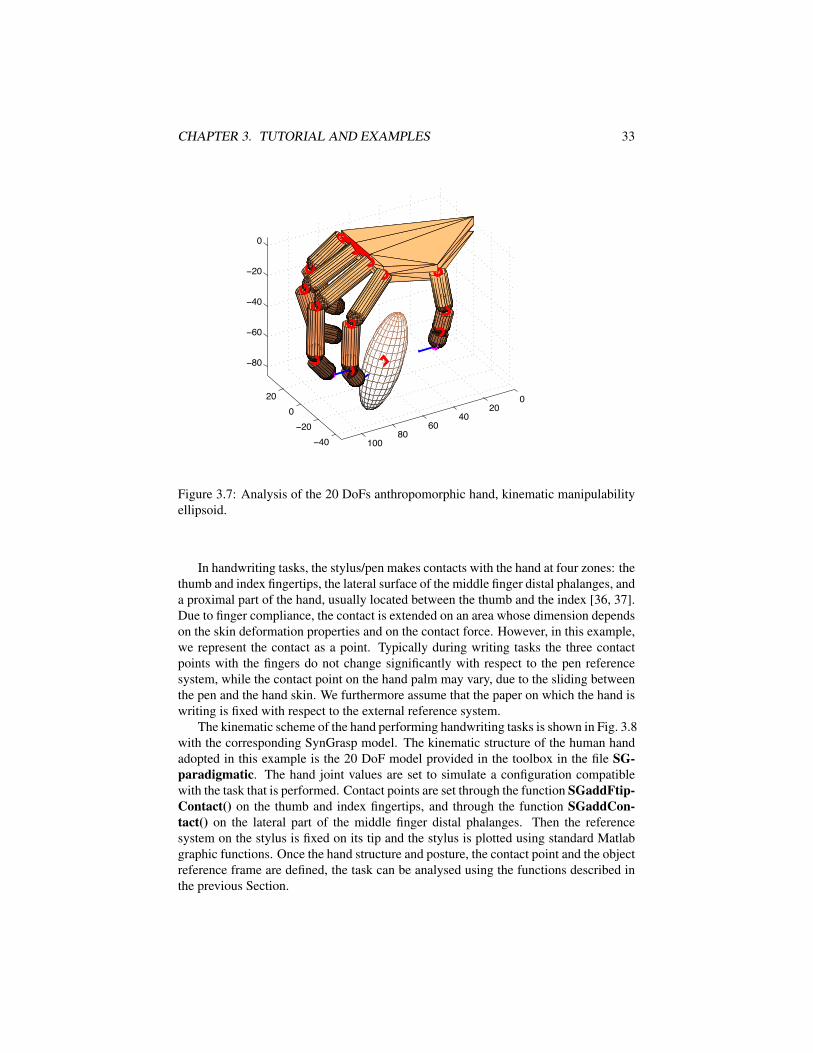
Figure 3.7: Analysis of the 20 DoFs anthropomorphic hand, kinematic manipulabilityellipsoid.
In handwriting tasks, the stylus/pen makes contacts with the hand at four zones: thethumb and index fingertips, the lateral surface of the middle finger distal phalanges, anda proximal part of the hand, usually located between the thumb and the index [36, 37].Due to finger compliance, the contact is extended on an area whose dimension dependson the skin deformation properties and on the contact force. However, in this example,we represent the contact as a point. Typically during writing tasks the three contactpoints with the fingers do not change significantly with respect to the pen referencesystem, while the contact point on the hand palm may vary, due to the sliding betweenthe pen and the hand skin. We furthermore assume that the paper on which the hand iswriting is fixed with respect to the external reference system.
The kinematic scheme of the hand performing handwriting tasks is shown in Fig. 3.8with the corresponding SynGrasp model. The kinematic structure of the human handadopted in this example is the 20 DoF model provided in the toolbox in the file SG-paradigmatic. The hand joint values are set to simulate a configuration compatiblewith the task that is performed. Contact points are set through the function SGaddFtip-Contact() on the thumb and index fingertips, and through the function SGaddCon-tact() on the lateral part of the middle finger distal phalanges. Then the referencesystem on the stylus is fixed on its tip and the stylus is plotted using standard Matlabgraphic functions. Once the hand structure and posture, the contact point and the objectreference frame are defined, the task can be analysed using the functions described inthe previous Section.
CHAPTER 3. TUTORIAL AND EXAMPLES 34
{N}
{B}
c1
c2w λ1
λ2
qt,1
qt,3
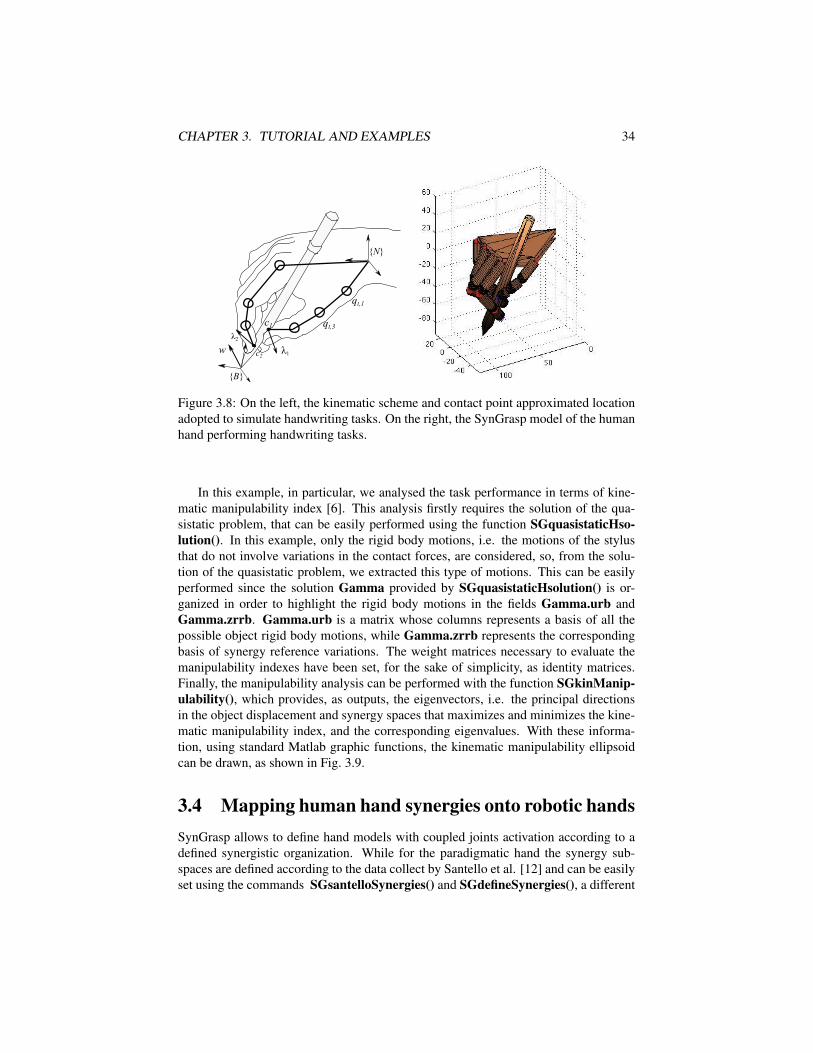
Figure 3.8: On the left, the kinematic scheme and contact point approximated locationadopted to simulate handwriting tasks. On the right, the SynGrasp model of the humanhand performing handwriting tasks.
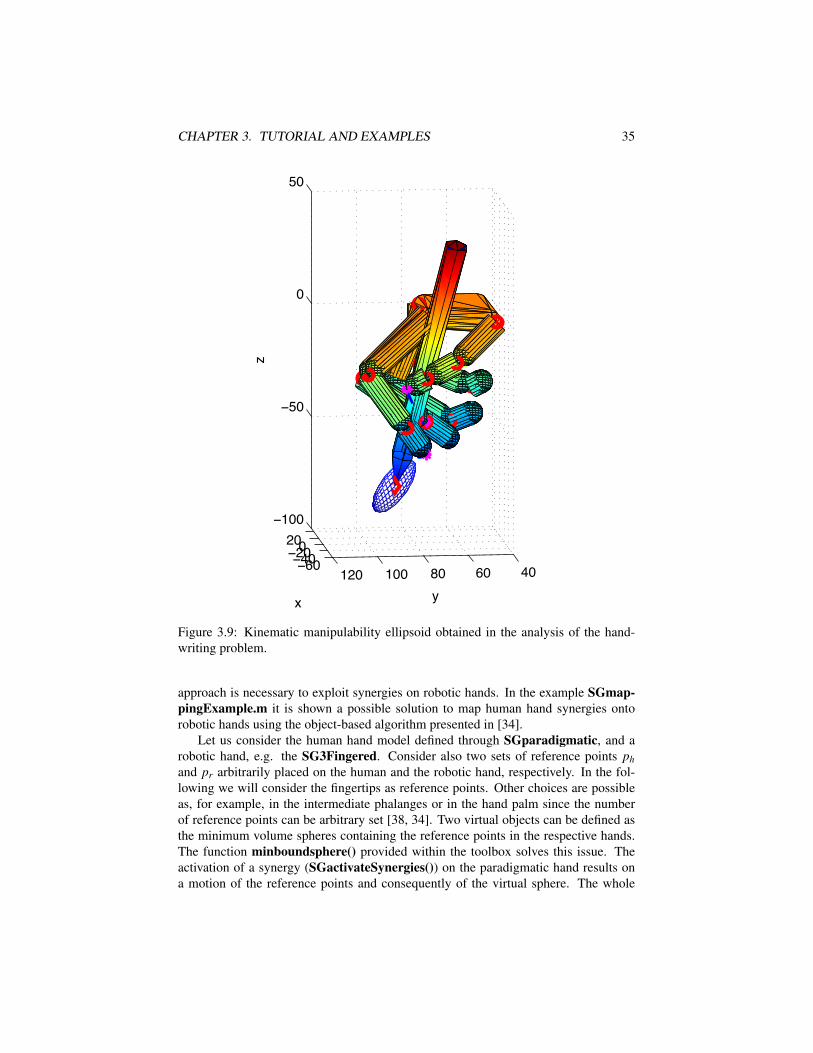
In this example, in particular, we analysed the task performance in terms of kine-matic manipulability index [6]. This analysis firstly requires the solution of the qua-sistatic problem, that can be easily performed using the function SGquasistaticHso-lution(). In this example, only the rigid body motions, i.e. the motions of the stylusthat do not involve variations in the contact forces, are considered, so, from the solu-tion of the quasistatic problem, we extracted this type of motions. This can be easilyperformed since the solution Gamma provided by SGquasistaticHsolution() is or-ganized in order to highlight the rigid body motions in the fields Gamma.urb andGamma.zrrb. Gamma.urb is a matrix whose columns represents a basis of all thepossible object rigid body motions, while Gamma.zrrb represents the correspondingbasis of synergy reference variations. The weight matrices necessary to evaluate themanipulability indexes have been set, for the sake of simplicity, as identity matrices.Finally, the manipulability analysis can be performed with the function SGkinManip-ulability(), which provides, as outputs, the eigenvectors, i.e. the principal directionsin the object displacement and synergy spaces that maximizes and minimizes the kine-matic manipulability index, and the corresponding eigenvalues. With these informa-tion, using standard Matlab graphic functions, the kinematic manipulability ellipsoidcan be drawn, as shown in Fig. 3.9.
3.4 Mapping human hand synergies onto robotic handsSynGrasp allows to define hand models with coupled joints activation according to adefined synergistic organization. While for the paradigmatic hand the synergy sub-spaces are defined according to the data collect by Santello et al. [12] and can be easilyset using the commands SGsantelloSynergies() and SGdefineSynergies(), a different
CHAPTER 3. TUTORIAL AND EXAMPLES 35
−60−40−20020
406080100120
−100
−50
0
50
yx
z
Figure 3.9: Kinematic manipulability ellipsoid obtained in the analysis of the hand-writing problem.
approach is necessary to exploit synergies on robotic hands. In the example SGmap-pingExample.m it is shown a possible solution to map human hand synergies ontorobotic hands using the object-based algorithm presented in [34].
Let us consider the human hand model defined through SGparadigmatic, and arobotic hand, e.g. the SG3Fingered. Consider also two sets of reference points phand pr arbitrarily placed on the human and the robotic hand, respectively. In the fol-lowing we will consider the fingertips as reference points. Other choices are possibleas, for example, in the intermediate phalanges or in the hand palm since the numberof reference points can be arbitrary set [38, 34]. Two virtual objects can be defined asthe minimum volume spheres containing the reference points in the respective hands.The function minboundsphere() provided within the toolbox solves this issue. Theactivation of a synergy (SGactivateSynergies()) on the paradigmatic hand results ona motion of the reference points and consequently of the virtual sphere. The whole
CHAPTER 3. TUTORIAL AND EXAMPLES 36
−50 0 5020 30 40 50 60 70 80 90 100 110 120
−70
−60
−50
−40
−30
−20
−10
0
10
rh
pih
qh
−50
0
50
100
−100−80−60−40−20020406080100−100
−80
−60
−40
−20
0
20 qr
rr
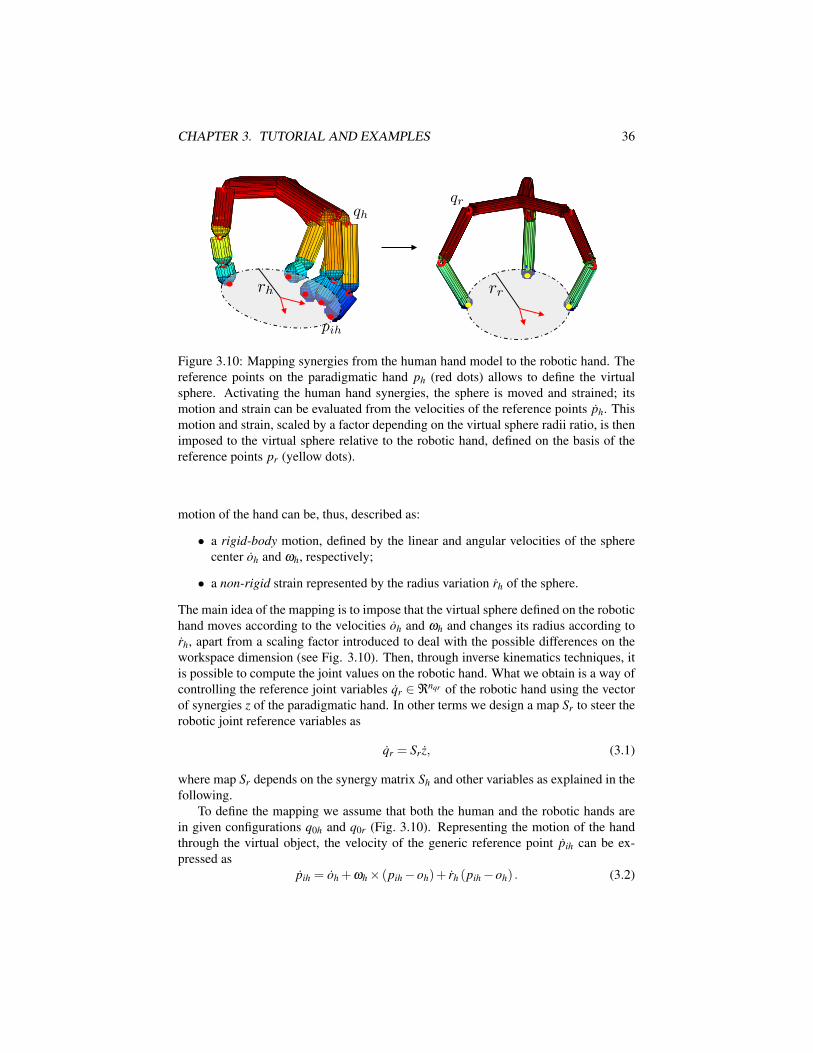
Figure 3.10: Mapping synergies from the human hand model to the robotic hand. Thereference points on the paradigmatic hand ph (red dots) allows to define the virtualsphere. Activating the human hand synergies, the sphere is moved and strained; itsmotion and strain can be evaluated from the velocities of the reference points ph. Thismotion and strain, scaled by a factor depending on the virtual sphere radii ratio, is thenimposed to the virtual sphere relative to the robotic hand, defined on the basis of thereference points pr (yellow dots).
motion of the hand can be, thus, described as:
• a rigid-body motion, defined by the linear and angular velocities of the spherecenter oh and ωh, respectively;
• a non-rigid strain represented by the radius variation rh of the sphere.
The main idea of the mapping is to impose that the virtual sphere defined on the robotichand moves according to the velocities oh and ωh and changes its radius according torh, apart from a scaling factor introduced to deal with the possible differences on theworkspace dimension (see Fig. 3.10). Then, through inverse kinematics techniques, itis possible to compute the joint values on the robotic hand. What we obtain is a way ofcontrolling the reference joint variables qr ∈ℜnqr of the robotic hand using the vectorof synergies z of the paradigmatic hand. In other terms we design a map Sr to steer therobotic joint reference variables as
qr = Sr z, (3.1)
where map Sr depends on the synergy matrix Sh and other variables as explained in thefollowing.
To define the mapping we assume that both the human and the robotic hands arein given configurations q0h and q0r (Fig. 3.10). Representing the motion of the handthrough the virtual object, the velocity of the generic reference point pih can be ex-pressed as
pih = oh +ωh× (pih−oh)+ rh (pih−oh) . (3.2)
CHAPTER 3. TUTORIAL AND EXAMPLES 37
Grouping all the reference point we obtain
ph = Ah
ohωhrh
, (3.3)
where matrix Ah ∈ℜnch×7 is defined as
Ah =
I −S(p1h−oh) (p1h−oh)· · · · · · · · ·I −S(pih−oh) (pih−oh)· · · · · · · · ·
(3.4)
and S() is the skew operator. The SynGrasp function mapping A computes the matrixAh. The virtual sphere motion and deformation is then computed as a function of thesynergy vector velocity z of the paradigmatic hand oh
ωhrh
= A#h ph = A#
hJhShz, (3.5)
where A#h denotes the pseudo-inverse of matrix Ah. Let us define the virtual object
scaling factor as the ratio between the sphere radii ksc =rrrh
. This factor is necessaryto scale the velocities from the human to the robotic hand workspaces. Note that thescaling factor depends on the hand dimensions, but also on their configuration.
Then, the motion and deformation of the virtual sphere generated by the paradig-matic hand are scaled and tracked by the virtual sphere referred to the robotic hand
orωrrr
= Kc
ohωhrh
, (3.6)
where the scale matrix Kc ∈ℜ7×7 is defined as
Kc =
kscI3,3 03,3 03,103,3 I3,3 03,101,3 01,3 1
. (3.7)
According to eq. (3.3), the corresponding robot reference point velocity pr is given by
pr = Ar
orωrrr
, (3.8)
where matrix Ar ∈ ℜncr×7 is defined as in eq. (3.4). Recalling eq. (3.5) and (3.6) wecan express the robotic hand reference point velocities pr as a function of the synergyvelocities z
pr = ArKcA#hJhShz (3.9)
CHAPTER 3. TUTORIAL AND EXAMPLES 38
J1
J2 J4
J3
θ2
θ3
θ4
C1 C2{B}
{N}
ka
zr1 zr2
z2z1
θ1
kp
kp
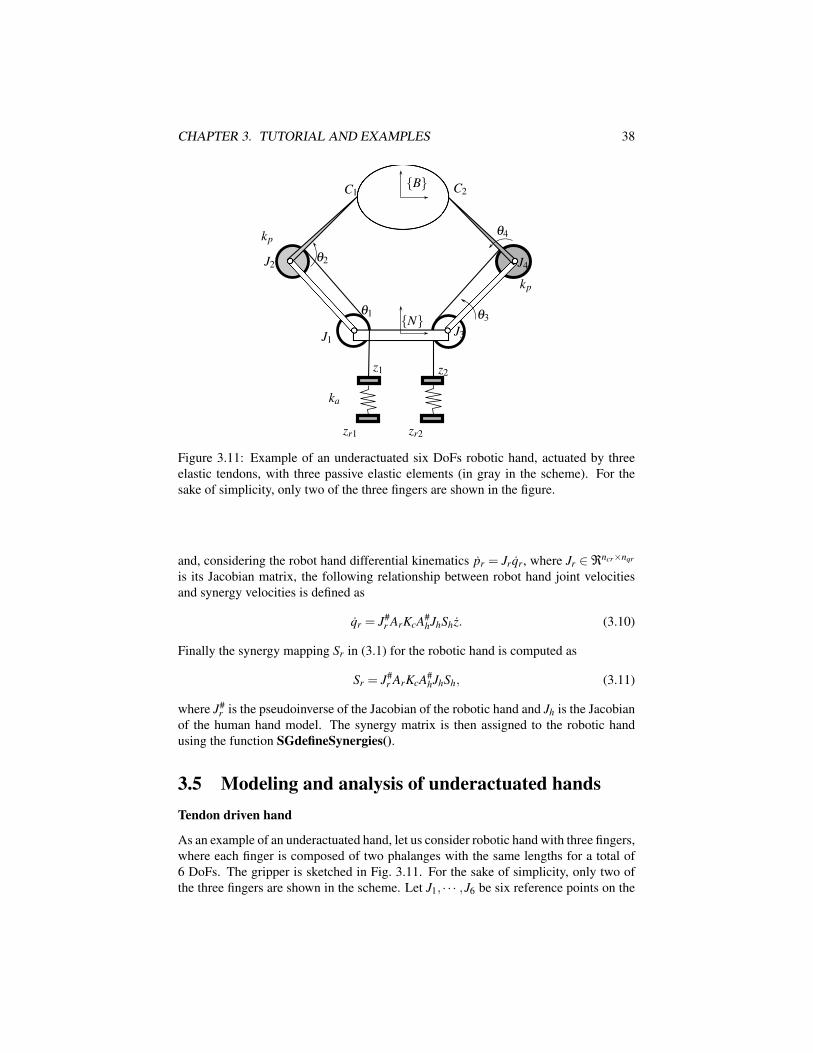
Figure 3.11: Example of an underactuated six DoFs robotic hand, actuated by threeelastic tendons, with three passive elastic elements (in gray in the scheme). For thesake of simplicity, only two of the three fingers are shown in the figure.
and, considering the robot hand differential kinematics pr = Jrqr, where Jr ∈ℜncr×nqr
is its Jacobian matrix, the following relationship between robot hand joint velocitiesand synergy velocities is defined as
qr = J#r ArKcA#
hJhShz. (3.10)
Finally the synergy mapping Sr in (3.1) for the robotic hand is computed as
Sr = J#r ArKcA#
hJhSh, (3.11)
where J#r is the pseudoinverse of the Jacobian of the robotic hand and Jh is the Jacobian
of the human hand model. The synergy matrix is then assigned to the robotic handusing the function SGdefineSynergies().
3.5 Modeling and analysis of underactuated handsTendon driven hand
As an example of an underactuated hand, let us consider robotic hand with three fingers,where each finger is composed of two phalanges with the same lengths for a total of6 DoFs. The gripper is sketched in Fig. 3.11. For the sake of simplicity, only two ofthe three fingers are shown in the scheme. Let J1, · · · ,J6 be six reference points on the

CHAPTER 3. TUTORIAL AND EXAMPLES 39
joint axes, and let θ1, · · · ,θ6 be the joint angles. The structure of the hand is definedin the SynGrasp file SGunderActuated1, while the whole example can be found onSGexampleUnderactuated. The main aspect to be considered in this example is thecoupling between the joint realized through the pulley-tendon system. This couplingis modeled through the definition of S matrix in the file SGexampleUnderactuated,whose elements depend on pulley radii. In this case S matrix is constant.
In this example, we assume that the robotic hand is grasping an object with its fin-gertips, with contact points in C1, C2, and C3. The origin of the local object referenceframe is on the centroid of the contact points, the local x axis is parallel to C1C2 direc-tion, and the local z direction is orthogonal to the plane defined by the contact points.The contact points are added to the model with the function SGaddFtipContact. Thecontact model assumed in this example is the hard finger. The object displacement isdefined with respect to the base reference system by the vector u ∈ ℜ6. We considera reference configuration in which the external load w0 is zero, the contact forces areλ01, λ02, and λ03, applied at the points C1, C2 and C3, respectively. The contact vectoris then defined as λ0 = [λ T
01 λ T02 λ T
03]T ∈ℜ9.
Once the hand structure, the hand configuration, and the contact points are defined,the Grasp matrix and the Jacobian matrix can be evaluated with the functions SG-jacobianMatrix and SGgraspMatrix previously described. A first numerical analy-sis was devoted to evaluate the total grasp stiffness [22]. We considered a referenceconfiguration in which: θ1 = θ3 = θ5 = π
4 rad, θ2 = θ4 = θ6 = π
2 rad, w0 = 0 N,λ01 = λ02 = λ03 = 0 N. The phalanx length was set a = 0.035 m. The stiffness matri-ces were Kc = kcI6,6, Kq = kqI6,6, where kc = 1000 N/m, kq = 100 Nm/rad.
Let us assume that each finger is driven by a tendon as shown in Fig. 3.11. Thisactuation system is a simplified illustrative example inspired by the work presented in[39]. The system has still six degrees of freedom, but only three actuators. We candefine the Lagrangian variable vector as z = [z1 z2 z3 q2 q4 q6]
T, in which z1, z2, andz3 represent tendon displacements and are actively controlled, while q2, q4 and q6 arepassive. From the kinematic analysis of the mechanism it results that
S =
1r1
0 0 − r2r1
0 00 0 0 1 0 00 1
r10 0 − r2
r10
0 0 0 0 1 00 0 1
r10 0 − r2
r10 0 0 0 0 1
,
where r1 and r2 are the pulley radii on the joints J1− J3− J5 and J2− J4− J6, respec-tively. In this case S is constant. Since the hand is underactuated, only the first threecomponents of the Lagrangian variable vector reference values zr are controllable, theothers will be null or constant, since they represents passive degrees of freedom. So, inthe modeling, we will consider ∆zr = [∆z1 ∆z2 ∆z3 0 0 0]T. The stiffness matrix Kzis defined as Kz = diag(ka,ka,ka,kp,kp,kp), where ka is the tendon stiffness, expressedin N/m, while kp is the passive joint stiffness, expressed in Nm/rad.
The resulting total grasp stiffness matrix K expresses the relationship between the

CHAPTER 3. TUTORIAL AND EXAMPLES 40
object wrench and displacement, i.e.,
∆w = K∆u.
According to [22] [21], K matrix can be evaluated as follows
K = G(K−1
c + JKqJT + JSKzSTJT)−1GT.
It can be easily evaluated using SynGrasp functions, and its values are
K =
[Kt 00 Kr
]where
Kt =
1027 0 00 2014 00 0 195
N/m
Kr =
116 0 00 298 00 0 582
Nm/rad
The function SGquasistatic() can be adopted also in this example to solve thelinearized grasp system for the assigned grasp configuration and for a given variationof the tendon reference displacements. Since only three DoFs are controllable, thesubspace of controllable internal force dimension is three and a basis of such subspaceis given by the matrix P obtained by applying the function SGquasistaticMaps() andconsidering the first three columns
P =
−0.0719 0.0 −0.00150.0381 0.0365 −0.0381
0.0 −0.0 0.00.0704 −0.0000 −0.0704
0.0 −0.0729 0.00.0 0.0 0.0
0.0015 0.0 0.0719−0.0381 0.0365 0.0381
0.0 0.0 0.0
.
A six DoFs hand actuated with two four linkages mechanisms
Let us again consider a three fingered robotic hand, whose kinematic structure isdescribed by the same SynGrasp file SGunderActuated1, in this case we assumethat each finger is actuated according to a mechanical system schematically shownin Fig. 3.12, inspired by [40]. Each finger in this case presents four joints, defininga parallel kinematic structure. In this analysis, we assume that the contact points areon the links a1 and a5, only two joint angles are considered in grasp analysis, namely,for the first finger, the angles q1 and q2 shown in Fig. 3.12. Each finger of the gripper

CHAPTER 3. TUTORIAL AND EXAMPLES 41
a
a
a
aa
1
2
3
4
5
d
z
za
p
γ γ
γ12
q1
αq2
Figure 3.12: Underactuated hand with passive joints, kinematics of one of the fingers.
has two degrees of freedom, but it is actuated by only one motor, that moves the linkindicated with a2. We need another variable to describe the finger configuration, wecan choose the angle between links a1 and a4, indicated with zp. Then, for each fingerwe have zi = [za,zp]
T, the joint variable are q1 and q2. We observe that
q2 = α + zp−π
where α is the angle between links a5 and a4, constant. Furthermore we observe that
q1 = za + γ γ = γ1 + γ2
γ1 = arccos(
a21 +d2−a4
42a1d
)γ2 = arccos
(a2
2 +d2−a43
2a2d
)d =
√a2
1 +a24−2a1a4 coszp
Then the synergy matrix S can be evaluated as
S =
Si 0 00 Si 00 0 Si
with
S =
[∂q1∂ za
∂q1∂ zp
∂q2∂ za
∂q2∂ zp
]=
[1 dγ
dzp
0 1
]Fig. 3.13 shows, for three values of za and zp (arbitrarily selected, the same values
were assumed for the three fingers, for the sake of simplicity), the corresponding handconfiguration and the numerical value of the non–linear term in the synergy matrix.Also in the underactuated case, the linearized grasp system can be easily solved usingSynGrasp functions, in particular, the matrix P that maps input references variables ∆zato contact forces ∆λ in this case has dimensions 9×3.
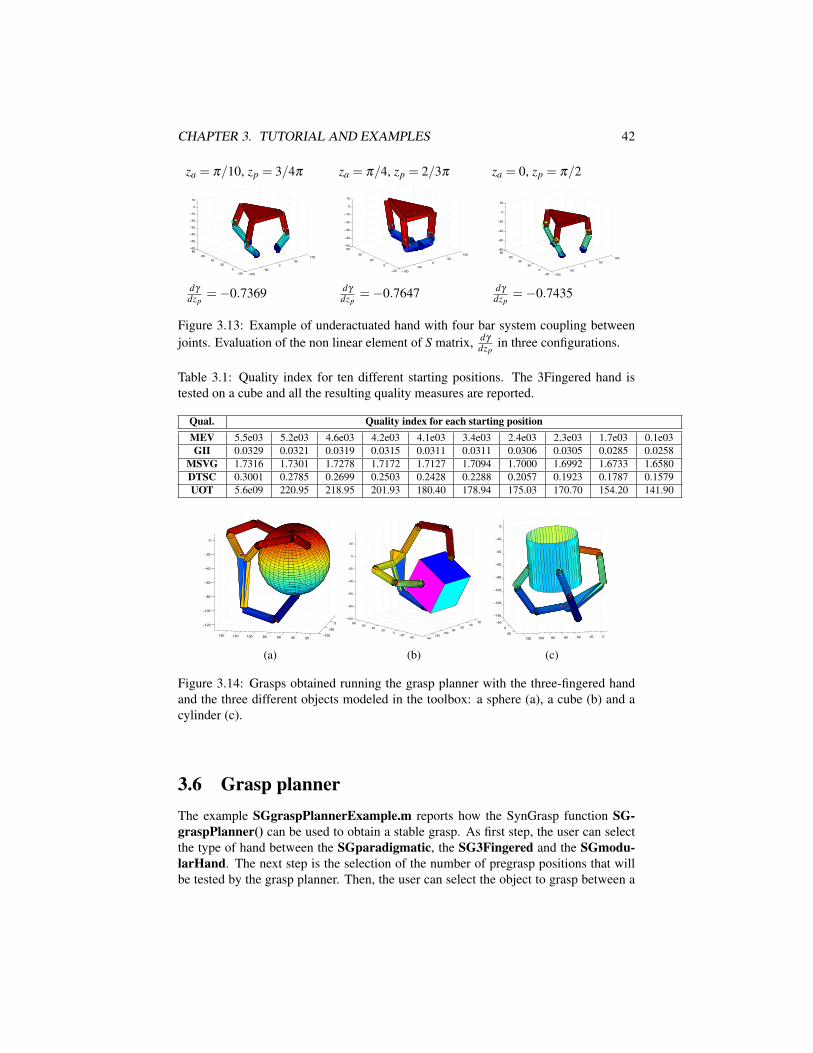
CHAPTER 3. TUTORIAL AND EXAMPLES 42
za = π/10, zp = 3/4π za = π/4, zp = 2/3π za = 0, zp = π/2
−100−50
050
100
−200
2040
6080
−60
−50
−40
−30
−20
−10
0
10
−100−50
050
100
−200
2040
60−50
−40
−30
−20
−10
0
10
−100−50
050
100
−200
2040
6080
−80
−60
−40
−20
0
20
dγ
dzp=−0.7369 dγ
dzp=−0.7647 dγ
dzp=−0.7435
Figure 3.13: Example of underactuated hand with four bar system coupling betweenjoints. Evaluation of the non linear element of S matrix, dγ
dzpin three configurations.
Table 3.1: Quality index for ten different starting positions. The 3Fingered hand istested on a cube and all the resulting quality measures are reported.
Qual. Quality index for each starting positionMEV 5.5e03 5.2e03 4.6e03 4.2e03 4.1e03 3.4e03 2.4e03 2.3e03 1.7e03 0.1e03GII 0.0329 0.0321 0.0319 0.0315 0.0311 0.0311 0.0306 0.0305 0.0285 0.0258
MSVG 1.7316 1.7301 1.7278 1.7172 1.7127 1.7094 1.7000 1.6992 1.6733 1.6580DTSC 0.3001 0.2785 0.2699 0.2503 0.2428 0.2288 0.2057 0.1923 0.1787 0.1579UOT 5.6e09 220.95 218.95 201.93 180.40 178.94 175.03 170.70 154.20 141.90
−100
−50
0
20406080100120140
−120
−100
−80
−60
−40
−20
0
xy
best obtained grasp
z
(a)
−40−20
020
4060
80 2040
6080
100120
140
−100
−80
−60
−40
−20
0
20
z
(b)
−500
50020406080100120
−140
−120
−100
−80
−60
−40
−20
0
y
best obtained grasp
x
z
(c)
Figure 3.14: Grasps obtained running the grasp planner with the three-fingered handand the three different objects modeled in the toolbox: a sphere (a), a cube (b) and acylinder (c).
3.6 Grasp plannerThe example SGgraspPlannerExample.m reports how the SynGrasp function SG-graspPlanner() can be used to obtain a stable grasp. As first step, the user can selectthe type of hand between the SGparadigmatic, the SG3Fingered and the SGmodu-larHand. The next step is the selection of the number of pregrasp positions that willbe tested by the grasp planner. Then, the user can select the object to grasp between a

CHAPTER 3. TUTORIAL AND EXAMPLES 43
sphere, a cylinder and a cube. The object are then created using the specific functionSGsphere(), SGcylinder() and SGcube(). Finally, it is required to select the qualitymeasure to be used for the grasp selection. The grasp planner is now called and thebest resulting grasp plotted.
Tab. 3.1 reports the results for the SG3Fingered hand grasping a cube with 50mmedge. Ten different starting positions are considered. The table shows the obtainedquality indexes using the available quality measures, where MEV stands for manipula-bility ellipsoid volume quality index, GII is the grasp isotropy index, MSVG representsthe minimum singular value of the matrix G, DSTC is the distance from the singularconfiguration and UOT is the uniformity measure. In Fig. 2.3 the best obtained graspusing the SGdistSingularConfiguration quality measure is shown.
In Fig. 3.14 three possible outputs of the grasp planning algorithm are represented.We ran the grasp planner on the three-fingered hand model in order to generate suitablegrasps of the three different objects available in SynGrasp. Ten possible grasps werecomputed for each of the three objects, and the best configurations were selected amongthem, according to the grasp isotropy index (GII) metric.
Chapter 4
Useful readings
4.1 On Motion and Force Control of Grasping Handswith Postural Synergies
Authors: D. Prattichizzo, M. Malvezzi, A. Bicchi [13]The complexity of robotic hands is needed to adapt devices to the many kinds of
tasks, but the large number of motors needed to fully actuate the DoFs comes at the costof size, complexity and weight of devices. A possible approach to solve this problemconsists of reducing the number of actuators thus resulting more efficient, simpler andreliable than their fully actuated alternatives. Reducing control inputs seems to inspirealso biological systems and in particular motor control of human hands, which sharewith robotic hands the large number of DoFs. Recent studies demonstrated that a fewcontrol variables, named postural synergies, are able to account for most of the variancein the patterns of hand movements and configurations of hands. This paper focuseson hands with postural synergies. Reducing the number of control inputs, from fullyactuated joints to few synergies, might reduce the dimension of the force and motioncontrollability subspaces thus compromising the dexterity of the grasp, however, thisis not true in general but strongly depends on how synergies are distributed. The paperinvestigates to what extent a hand with many DoFs can exploit postural synergies tocontrol force and motion of the grasped object.
4.2 On the Role of Hand Synergies in the Optimal Choiceof Grasping Forces
Authors: M. Gabiccini A. Bicchi D. Prattichizzo M. Malvezzi [15]Recent work on the analysis of natural and robotic hands has introduced the notion
of postural synergies as a principled organization of their complexity, based on thephysical characteristics of the hand itself. Such characteristics include the mechanicalarrangements of joints and fingers, their couplings, and the low-level control reflexes,that determine the specific way the concept of hand is embodied in a human being
44

CHAPTER 4. USEFUL READINGS 45
or a robot. While the focus of work done so far with postural synergies has been onmotion planning for grasp acquisition, in this paper we set out to investigate the rolethat different embodiments have on the choice of grasping forces, and on the ultimatequality of the grasp. Numerical results are presented showing quanti- tatively the roleplayed by different synergies (from the most fundamental to those of higher-order) inmaking a number of different grasps possible. The effect of num- ber and types ofengaged synergies on the distribution of optimal grasp forces is considered. Moreover,robustness of results is investigated with respect to variation in uncertain parameterssuch as contact and joint stiffness.
4.3 On Motion and Force Controllability of PrecisionGrasps with Hands Actuated by Soft Synergies
Authors: D. Prattichizzo, M. Malvezzi, M. Gabiccini, A. Bicchi [41]To adapt to many different objects and tasks, hands are very complex systems with
many degrees of freedom (DoFs), sensors, and actuators. In robotics, such complexitycomes at the cost of size and weight of the hardware of devices, but it strongly affectsalso the ease of their programming. A possible approach to simplification consistsin coupling some of the DOFs, thus affording a reduction of the number of effectiveinputs, and eventually leading to more efficient, simpler, and reliable designs. Suchcoupling can be at the software level, to achieve faster, more intuitive programmabilityor at the hardware level, through either rigid or compliant physical couplings betweenjoints. Physical coupling between actuators and simplification of control through thereduction of independent inputs is also an often-reported interpretation of human handmovement data, where studies have demonstrated that few postural synergies explainmost of the variance in hand configurations used to grasp different objects. Togetherwith beneficial simplifications, the reduction of the number of independent inputs to afew coupled motions or synergies has also an impact on the ability of the hand to dex-terously control grasp forces and in- hand manipulation. This paper aims to developtools that establish how many synergies should be involved in a grasp to guarantee sta-bility and efficiency, depending on the task and on the hand embodiment. Through theanalysis of a quasi-static model, grasp structural properties related to contact force andobject motion controllability are defined. Different compliant sources are consid- ered,for a generalization of the discussion. In particular, a compliant model for synergiesassumed, referred to as soft synergies, is discussed. The controllable internal forcesand motions of the grasped object are related to the actuated inputs. This paper inves-tigates to what extent a hand with many joints can exploit postural synergies to controlforce and motion of the grasped object.
4.4 On the manipulability ellipsoids of underactuatedrobotic hands with compliance
Authors: D. Prattichizzo, M. Malvezzi, M. Gabiccini, A. Bicchi [6]

CHAPTER 4. USEFUL READINGS 46
Underactuation in robotic hands is currently attracting a lot of interest from re-searchers. The challenging idea of underactuation in grasping is that hands, with re-duced number of actuators, supported by suitable design and control, may not sufferfrom reduced performances. This trend is also strengthened by recent neurosciencestudies which demonstrates that also humans use sensorimotor synergies to control thehand in performing grasping tasks. In this paper, we focus on the kinematic and forcemanipulability analyses of underactuated robotic hands. The performances of suchhands, regarded as mechanical transformers of inputs as forces and speed into outputsas object wrench and displacements, are assessed by suitably defined manipulationindices. The whole analysis is not limited by rigid-body motion assumptions, but en-compasses elastic motions and statically indeterminate configurations by introducinggeneralized compliance at contacts and actuation. Two examples show the validity ofthe proposed approach to evaluate underactuated hand performances.
4.5 Internal force control with no object motion in com-pliant robotic grasps
Authors: D. Prattichizzo, M. Malvezzi [42]Control of internal forces is one of the key issues in robotic grasping. When the
robotic hand is compliant, for instance with passive springs at the joints, and the num-ber of controlled variables is low, as for instance in recent works for underactuatedhands, it is possible that the control of internal forces implies the motion of the ma-nipulated object. This paper deals with this issue and proposes a control approach tocontrol internal forces which do not involve any motion of the grasped object.
4.6 Mapping synergies from human to robotic handswith dissimilar kinematics: an object based approach
Authors: G. Gioioso, G. Salvietti, M. Malvezzi, D. Prattichizzo [34]Robotic hands differ in kinematics, dynamics, programming, control and sensing
frameworks. Their common character is redundancy, which undoubtedly represents akey feature for dexterity and flexibility, but it is also a drawback for integrated automa-tion since it typically requires additional efforts to seamlessly integrate devices, partic-ularly robotic hands, in industrial scenario. This paper focuses on the mapping betweenhands with dissimilar kinematics. It is based on the argument that the reflected optimal-ity of the pattern of grasping forces emerging from human hand synergies should bematched, in some sense, by the sought for postural synergies of robotic hands. As a nat-ural consequence of the proposed approach, postural synergies for different kinematicstructures could look entirely different in geometric shape. This difference should be aconsequence of aspects such as different dimensions, kinematic structures, number offingers, compliance, contact properties which cannot come into play if a gross geomet-ric mapping is applied. The proposed mapping is based on the use of a virtual sphereand will be mediated by a model of an anthropomorphic robotic hand able to capture

CHAPTER 4. USEFUL READINGS 47
the idea of synergies in human hands.
4.7 Object motion-decoupled internal force control fora compliant multifingered hand
Authors: D. Prattichizzo, M. Malvezzi, M. Aggravi and T. Wimboeck [43] Com-pliance in multifingered hand improves grasp stability and effectiveness of the ma-nipulation tasks. Compli- ance of robotic hands depends mainly on the joint controlparameters, on the mechanical design of the hand, as joint passive springs, and on thecontact properties. In object grasping the primary task of the robotic hand is the con-trol of internal forces which allows to satisfy the contact constraints and consequentlyto guarantee a stable grasp of the object. When compliance is an essential element ofthe multifingered hand, and the control of the internal forces is not designed to be de-coupled from the object motion, it happens that a change in the internal forces causesthe object trajectory to deviate from the planned path with consequent performancedegradation. This paper studies the structural conditions to design an internal forcecontroller decoupled from object motions. The analysis is constructive and a controllerof internal forces is proposed. We will refer to this controller as object motion- de-coupled control of internal forces. The force controller has been successfully tested ona realistic model of the DLR Hand II. This controller provides a trajectory interfaceallowing to vary the internal forces (and to specify object motions) of an underactuatedhand, which can be used by higher-level modules, e.g. planning tools.
4.8 On the Use of Homogeneous Transformations to MapHuman Hand Movements onto Robotic Hands
Authors: G. Salvietti, M. Malvezzi, G. Gioioso, D. Prattichizzo [44]Replicating the human hand capabilities is a great challenge in telemanipulation
as well as in autonomous grasping and manipulation. One of the main issues is thedifference between human and robotic hands in terms of kinematic structure, whichdoes not allow a direct correlation of the joints. We recently proposed an object-basedmapping algorithm able to replicate on several robotic hand models the human handsynergies. In such approach the virtual object shapes were a-priori defined (e.g. asphere or an ellipsoid) and the transformation was represented as the composition of arigid body motion and a scale variation. In this work, we introduce a generalization ofthe object-based mapping that overcomes the definition of a shape for the virtual object.We consider only a set of reference points on the hands. We estimate a homogeneoustransformation matrix that represents how the human hand motion changes its referencepoint positions. The same transformation is then imposed to the reference points on therobotic hand and the joints values obtained through a kinematic inversion technique.The mapping approach is suitable also for telemanipulation scenarios where the handjoint motions are combined with a wrist displacement.

CHAPTER 4. USEFUL READINGS 48
4.9 Evaluation of grasp stiffness in underactuated com-pliant hands
Authors: M. Malvezzi, D. Prattichizzo [45]Underactuation represents a solution to reduce the number of Degrees of Freddom
(DoF) of robotic hands. Altough reducing the number of DoFs in general limits theability to perform many and different types of grasp, the use of springs in the structureimproves the compliance of the grasp and mitigates the loss of generality due to thereduction of DoFs in the mechanical structure. The use of active and passive elasticelements improves robustness of the whole grasp. In this paper we evaluate the graspstiffness which depends on the structural compliance of hand links and joints and ofthe contacts, and on the gains of impedance controllers. A quasi-static model of thegrasp for underactuated hands is presented and used to explicitly compute the graspcompliance.
4.10 An object-based mapping algorithm to control wear-able robotic extra-fingers
Authors: D. Prattichizzo, G. Salvietti, F. Chinello, M. Malvezzi, [46]One of the new targets of wearable robots is not to enhance the lift strength far
above human capability by wearing a bulky robot, but to support human capabilitywithin its range by wearing lightweight and compact robots. A new approach regard-ing robotic extra-fingers is presented here. In particular, an object-based mapping algo-rithm is proposed to control the robotic extra-fingers by interpreting the whole or a partof the hand motion in grasping and manipulation tasks. As a case study, the model andcontrol of an additional robotic finger is presented. The robotic finger has been placedon the wrist opposite to the hand palm. This solution enlarges the hand workspace,increasing the grasp capability of the user. The proposed mapping algorithm do notrequire the human operator to activate explicit commands. Rather, the motion of theextra-fingers is connected to the human hand so that the user can perceive the roboticfingers as an extension of his body.
4.11 Digital Handwriting with a Finger or a Stylus: aBiomechanical Comparison
Authors: D. Prattichizzo, L. Meli, M. Malvezzi [47]In this paper we present a study concerning the human hand during digital hand-
writing on a tablet. Two different cases are considered: writing with the finger, andwriting with the stylus. We chose an approach based on the biomechanics of the hu-man hand to compare the two different input methods. Performance is evaluated usingmetrics originally introduced and developed in robotics, such as the manipulabilityindexes. Analytical results assess that writing with the finger is more suitable for per-forming large, but not very accurate motions, while writing with the stylus leads to a

CHAPTER 4. USEFUL READINGS 49
higher precision and more isotropic motion performance. We then carried out two ex-periments of digital handwriting to support the approach and contextualize the results.
4.12 Modeling Compliant Grasps Exploiting Environ-mental Constraints
Authors: Salvietti, G. and Malvezzi, M. and Gioioso, G. and Prattichizzo, D. [48]In this paper we present a mathematical framework to describe the interaction be-
tween compliant hands and environmental constraints during grasping tasks. In theproposed model, we considered compliance at wrist, joint and contact level. We mod-eled the general case in which the hand is in contact with the object and the surroundingenvironment. All the other contact cases can be derived from the proposed system ofequations. We performed several numerical simulation using the SynGrasp MatlabToolbox to prove the consistency of the proposed model. We tested different combi-nations of compliance as well as different reference inputs for the hand/arm systemconsidered. This work has to be intended as a tool for compliant hand designer since itallows to tune compliance at different levels before the real hand realization. Further-more, the same framework can be used for compliant hand simulation in order to studythe interaction with the environmental constrains and to plan complex manipulationtasks.

Chapter 5
List of Functions
5.1 Analysis
5.1.1 SGcheckFriction()SGcheckFriction - check if the friction constraints are satisfied.The function allow to check the friction constraints
Usage: c = SGcheckFriction(w,y,pG,E,n,alpha,k)Arguments:
• w = external load
• y = coefficients for the linear combination of E columns
• pG = grasp matrix pseudoinverse
• E = controllable internal force subspace
• n = contact normal (matriz 3xnc)
• alpha = cosine of the friction angle
• k = positive margin
Returns:c= logic variable whose value is 1 if the contact constraint is satisfied for each contact,0 otherwise
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of grasp-ing hands with postural synergies. In Robotics: Science and Systems VI, pp. 49-56,The MIT Press, Zaragoza, Spain, June 2011.M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand synergiesin the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252,2011.
See also: SGquasistatic, SGquasistaticMaps
50
CHAPTER 5. LIST OF FUNCTIONS 51
5.1.2 SGforceManipulability()SGforceManipulability - Evaluate the force manipulability principal directions
Usage: SGforceManipulability(Gamma,in col,Ww,Ws)Arguments:
• Gamma = matrix of the homogeneous solution of grasp problem obtained withthe function SGquasistaticHsolution;
• in col = the index indicating the columns of Gamma to consider in the evaluation;
• Ww,Ws: weights matrices for the external wrench and the synergy forces, re-spectively.
Returns:
• forceManipulability.V principal directions in the x space
• forceManipulability.D eigenvalues of the manipulability problem
• forceManipulability.weig principal directions in the w space
• forceManipulability.seig principal directions in the sigma space
References D. Prattichizzo, M. Malvezzi, M. Gabiccini, A. Bicchi. On the Manip-ulability Ellipsoids of Underactuated Robotic Hands with Compliance. Robotics andAutonomous Systems, Elsevier, 2012.
See also: SGquasistaticHsolution, SGkinManipulability
5.1.3 SGgraspAnalysis()SGgraspAnalysis - Analyzes the grasp of the hand. The function analyzes the givengrasping configuration in terms of internal forces and object motions.
Usage: [E,V,N] = SGgraspAnalysis(hand)Arguments:
• hand = the hand to analyze
Returns:
• E = matrix of controllable internal forces
• V = base of internal movements than not generate movements of the object
• N = matrix of structural forces
See also: SGgraspMatrix, SGjacobianMatrix
CHAPTER 5. LIST OF FUNCTIONS 52
5.1.4 SGgraspStiffness()SGgraspStiffness - Evaluate the grasp stiffness matrix
Usage: K = SGgraspStiffness(hand, object)Arguments:
• hand, object: structures that contain hand and object grasp properties
Returns:
• K: a 6x6 matrix representing the grasp stiffness matrix
ReferencesM. Malvezzi, D. Prattichizzo, ”Evaluation of Grasp Stiffness in Underactuated
Compliant Hands”, Proceedings, IEEE International Conference on Robotics and Au-tomation, Karlsruhe, Germany, 2014.
See also: SGkinManipulability, SGforceManipulability, SGquasistaticHsolution
5.1.5 SGkinManipulability()SGkinManipulability - Evaluate the kinematic manipulability principal directions
Usage: kinmanipulability = SGkinManipulability(Gamma,in col,Wu,Wz)Arguments:
• Gamma = matrix of the homogeneous solution of grasp problem obtained withthe function SGquasistaticHsolution
• in col = the index indicating the columns of Gamma to be considered in theevaluation
• Wu,Wz: weights matrices for the object displacement and the synergy inputs,respectively
Returns:
• kinmanipulability.V principal directions in the x space
• kinmanipulability.D eigenvalues of the manipulability problem
• kinmanipulability.ueig principal directions in the u space
• kinmanipulability.zeig principal directions in the z space
References: D. Prattichizzo, M. Malvezzi, M. Gabiccini, A. Bicchi. On the Ma-nipulability Ellipsoids of Underactuated Robotic Hands with Compliance. Roboticsand Autonomous Systems, Elsevier, 2012.
CHAPTER 5. LIST OF FUNCTIONS 53
5.1.6 SGquasistatic()SGquasistatic - Performs a quasistatic analysis This function performs a quasistaticanalysis of a given grasp resulting from the activation of a given subset of synergies.Results are stored in the output structure
Usage: variation = SGquasistatic(hand,object,delta zr)Arguments:
• hand = the hand grasping the object
• object = the object grasped by the hand
• delta zr = a reference synergy activation vector. If no synergy matrix are definedfor the hand (S is an identity matrix), this argument can be seen as a variation ofthe joint values
Returns:
• variation.delta u = the obtained object motion
• variation.delta lambda = the variation on the contact forces
• variation.delta tau = the variation of the joint torques
• variation.delta q = the variation of the real joint position variation.delta sigma =the variation of the contact forces in the synergy space
• variation.delta z = the variation of the real joint position in the synergy space
• variation.delta qr = the variation of the reference joint position
References: D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force control-lability of grasping hands with postural synergies. In Robotics: Science and SystemsVI, pp. 49-56, The MIT Press, Zaragoza, Spain, June 2011.M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand synergiesin the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252,2011.
See also: SGquasistaticMaps, SGgraspAnalysis
5.1.7 SGquasistaticHsolution()SGquasistaticHsolution - Evaluate the kinematic manipulability principal directions
Usage: SGquasistaticHsolution(hand, object)Arguments:
• hand, object: structures that contain hand and object grasp properties
Returns:
• Gamma: matrix whose columns represent the solution of the grasp problem in aquasi-static framework
CHAPTER 5. LIST OF FUNCTIONS 54
References D. Prattichizzo, M. Malvezzi, M. Gabiccini, A. Bicchi. On the Manip-ulability Ellipsoids of Underactuated Robotic Hands with Compliance. Robotics andAutonomous Systems, Elsevier, 2012.
See also: SGkinManipulability, SGforceManipulability
5.1.8 SGquasistaticMaps()SGquasistaticMaps - Evaluate input/output maps of grasp problem
The function allows to evaluate input/output maps, solution of the quasistatic for-mulation of grasp problem
Usage: linMaps = SGquasistaticMaps(hand,object)Arguments:
• hand = the hand structure
• object = the object structure
Returns:
• linMaps.V = object motion
• linMaps.P = contact forces
• linMaps.Q = hand joint displacements
• linMaps.T = joint torques
• linMaps.Y = synergy actual values
References D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force control-lability of grasping hands with postural synergies. In Robotics: Science and SystemsVI, pp. 49-56, The MIT Press, Zaragoza, Spain, June 2011.
See also: SGquasistatic
5.1.9 SGrbMotions()SGrbMotions - Evaluate object rigid body motions. This functions evaluates the objectrigid body motion allowed in a given configuration of the hand-object system
Usage: rbmotion = SGrbMotions(hand,object)Arguments:
• hand = the hand structure
• object = the object structure
Returns:
• rbmotion.Zrb = synergy reference variation
• rbmotion.Urb = object displacement
CHAPTER 5. LIST OF FUNCTIONS 55
• rbmotion.Qrb = hand joint displacement
• rbmotion.Zarb = synergy actual variation
• rbmotion.Lrb = contact force variation-check variable, should be zero
• rbmotion.Trb = joint torques-check variable, should be zero
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of grasp-ing hands with postural synergies. In Robotics: Science and Systems VI, pp. 49-56,The MIT Press, Zaragoza, Spain, June 2011.
See also: SGquasistatic, SGquasistaticMaps
5.1.10 SGslide()SGslide - computes the displacement of hand joints and wrist position due to the dqrassigned. It takes care of the compliance at wrist, joint and contact level
Usage: [displacements] = SGslide(hand,Kc,dqr)Arguments:
• hand = the hand structure
• Kc = contact stiffness matrix
• dqr = reference joint displacement
Returns:
• displacements = joint and wrist displacement
References: G. Salvietti, M. Malvezzi, G. Gioioso, D. Prattichizzo. ModelingCompliant Grasps Exploiting Environmental Constraints. In Proc. IEEE Int. Conf. onRobotics and Automation, Seattle, USA, 2015.
See also: SGquasistatic, SGquasistaticMaps
5.1.11 SGVcost()SGVcost - Evaluate the force-closure cost function for a given grasp. The functionreturns the value of the force-closure cost function to minimize to achieve the bestgrasp feasible with the given set of synergies.
Usage: [yopt,cost] = fminsearch(@(y) SGVcost(w,y,pG,hand.Es,hand.cn,mu, fmin,fmax,k),y0)Arguments:
• w = the external load
• y = the optimization variable representing the synergy activation vector
• pG = grasp matrix pseudoniverse
• E = matrix of controllable internal forces of the analyzed hand

CHAPTER 5. LIST OF FUNCTIONS 56
• n = number of contact points
• mu = friction coefficent
• fmin = minimum normal force
• fmax = maximum normal force
• k = coefficent of the optimization function (suggested value: 0.01)
Returns:
• cost = the cost function
• yopt = the optimal synergy activation vector
See also: SGmakehand, SGmakeFingerReference:
M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand synergiesin the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252,2011.
Note: this evaluation is suitable only for Hard Finger Contact model
CHAPTER 5. LIST OF FUNCTIONS 57
5.2 Graphics
5.2.1 SGhandFrames()SGhandframe - plot the joint and the frame on a hand
Usage: out = SGhandframe(hand,scale)Arguments:
• hand = a hand structure
• scale = a scale factor for the plot
Returns:
• a plot of the hand frames
See also: SGplotjoint, SGplotframeframe
5.2.2 SGplotBase()SGplotBase - Plot the hand base or palm
Usage: SGplotBase(basepoints,radius,nps)Arguments:
• basepoints : 3xn matrix containing the coordinates of the points to be used toplot the palm
• radius (opt): fillet radius
• nps (opt): number of points for the fillet approximation
Returns:Adds the hand base representation to the current plot.
See also: SGplotHand, SGplotObject
5.2.3 SGplotContactForces()SGplotContactForces - Plot contact points, contact forces and object displacements
Usage: out = SGplotContactForces(object,deltalambda,deltau,scale u,scale l)Arguments:
• object = object structure with contact point info
• deltalambda (opt) = contact force to plot
• deltau (opt) = object displacement
• scale u (opt) = scale for the representation of object displacement
• scale l (opt) = scale factor for the representation of contact forces
Returns: a plot representing contact points, contact forces, object center and dis-placement.
See also: SGgraspAnalysis, SGquasistatic
CHAPTER 5. LIST OF FUNCTIONS 58
5.2.4 SGplotContactPoints()SGplotContactPoints - plot the contact points defined on the hand. This function plotsthe contact points defined in the hand structure.
Usage: SGplotContactPoints(hand,dim,type)Arguments:
• hand = the hand structure on which the contact points are defined
• type, dim = type and dimensions of the marker used to represent the contactpoints
Returns: a plot representing contact points.See also: SGmakehand, SGaddContact, SGaddFtipContact
5.2.5 SGplotframe()SGplotframe - plot a frame defined by the 4x4 matrix T
Usage: out = SGplotframe(T,scalef)Arguments:
• T = a 4x4 homogeneous matrix describing the orientation and the origin of aframe
• scalef = a scale factor for the diagram
Returns:
• a plot of the frame
See also: SGplotjoint, SGhandframes
5.2.6 SGplotGripper()SGplotGripper - Plot the model of a 4DoF planar gripper
Usage: SGplotGripper(hand,transp)Arguments:
• hand = the hand structure to plot
• transp = numerical parameter that represents surface transparency
See also: SGplotSyn, SGmakehand, SGmakeFinger,
5.2.7 SGplotHand()SGplotHand - Plot a hand. The function plots a hand given as argument.
Usage: SGplotHand(hand,transp)Arguments:
• hand = the hand structure to plot
• transp = numerical parameter that represents surface transparency
See also: SGplotSyn, SGmakehand, SGmakeFinger,
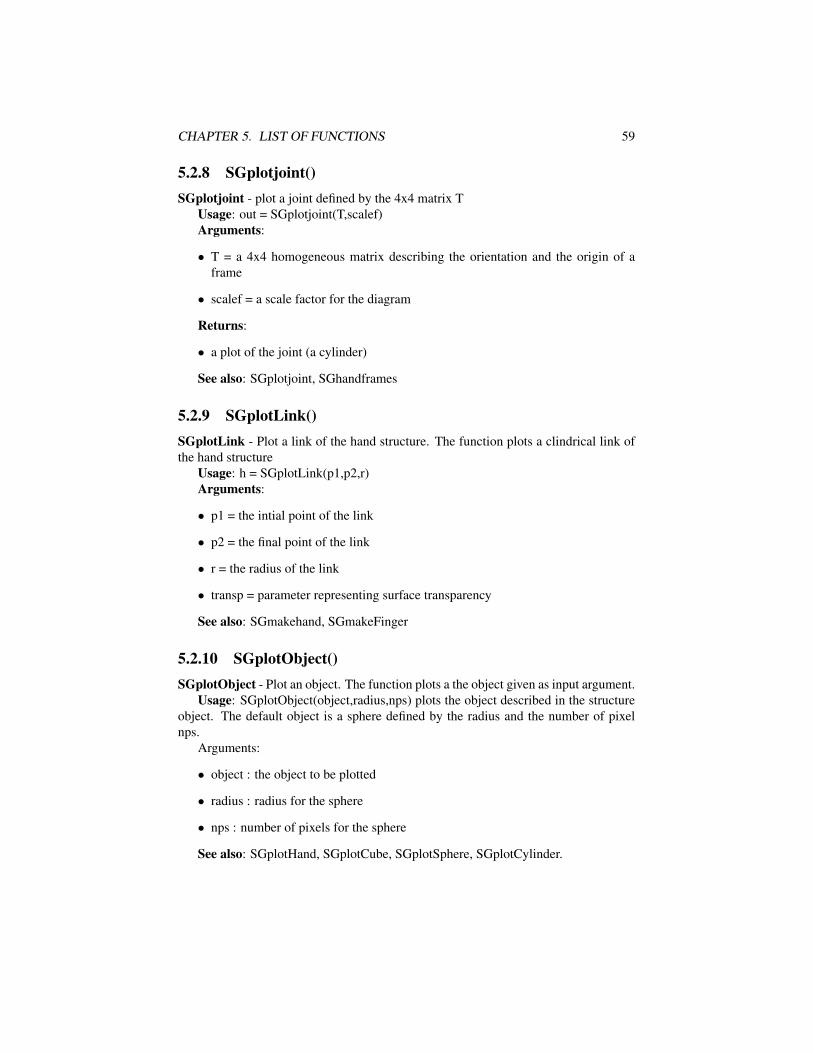
CHAPTER 5. LIST OF FUNCTIONS 59
5.2.8 SGplotjoint()SGplotjoint - plot a joint defined by the 4x4 matrix T
Usage: out = SGplotjoint(T,scalef)Arguments:
• T = a 4x4 homogeneous matrix describing the orientation and the origin of aframe
• scalef = a scale factor for the diagram
Returns:
• a plot of the joint (a cylinder)
See also: SGplotjoint, SGhandframes
5.2.9 SGplotLink()SGplotLink - Plot a link of the hand structure. The function plots a clindrical link ofthe hand structure
Usage: h = SGplotLink(p1,p2,r)Arguments:
• p1 = the intial point of the link
• p2 = the final point of the link
• r = the radius of the link
• transp = parameter representing surface transparency
See also: SGmakehand, SGmakeFinger
5.2.10 SGplotObject()SGplotObject - Plot an object. The function plots a the object given as input argument.
Usage: SGplotObject(object,radius,nps) plots the object described in the structureobject. The default object is a sphere defined by the radius and the number of pixelnps.
Arguments:
• object : the object to be plotted
• radius : radius for the sphere
• nps : number of pixels for the sphere
See also: SGplotHand, SGplotCube, SGplotSphere, SGplotCylinder.
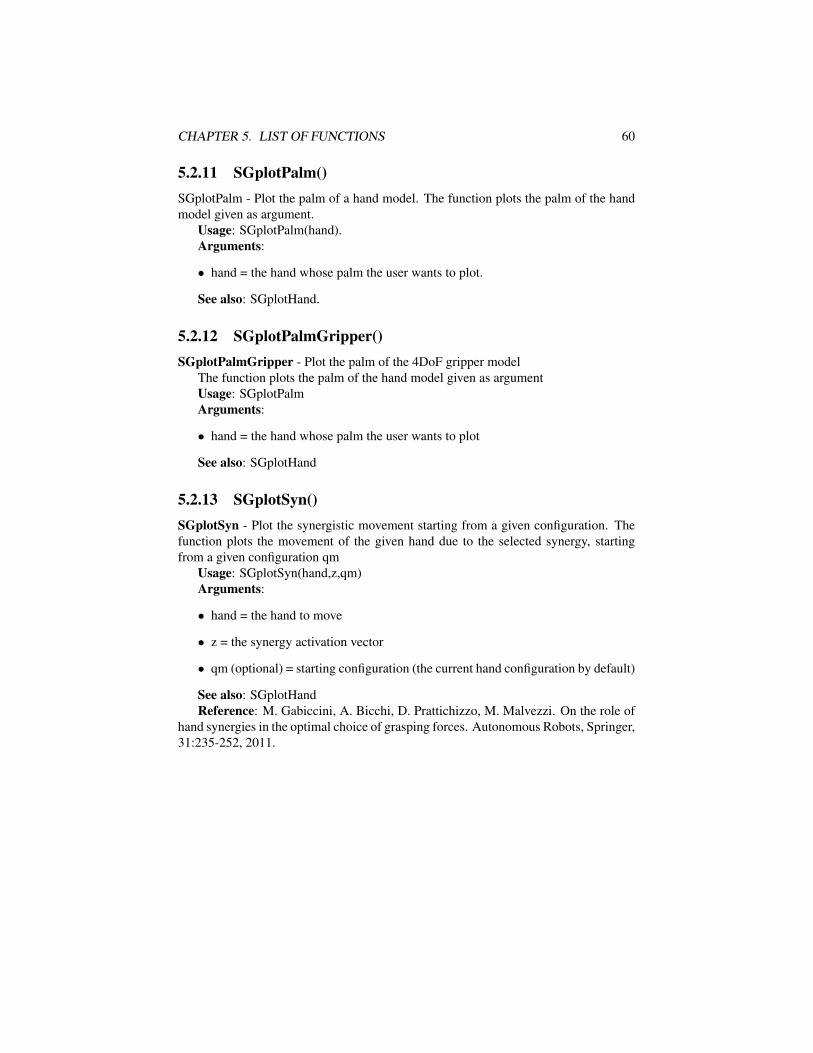
CHAPTER 5. LIST OF FUNCTIONS 60
5.2.11 SGplotPalm()SGplotPalm - Plot the palm of a hand model. The function plots the palm of the handmodel given as argument.
Usage: SGplotPalm(hand).Arguments:
• hand = the hand whose palm the user wants to plot.
See also: SGplotHand.
5.2.12 SGplotPalmGripper()SGplotPalmGripper - Plot the palm of the 4DoF gripper model
The function plots the palm of the hand model given as argumentUsage: SGplotPalmArguments:
• hand = the hand whose palm the user wants to plot
See also: SGplotHand
5.2.13 SGplotSyn()SGplotSyn - Plot the synergistic movement starting from a given configuration. Thefunction plots the movement of the given hand due to the selected synergy, startingfrom a given configuration qm
Usage: SGplotSyn(hand,z,qm)Arguments:
• hand = the hand to move
• z = the synergy activation vector
• qm (optional) = starting configuration (the current hand configuration by default)
See also: SGplotHandReference: M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of
hand synergies in the optimal choice of grasping forces. Autonomous Robots, Springer,31:235-252, 2011.
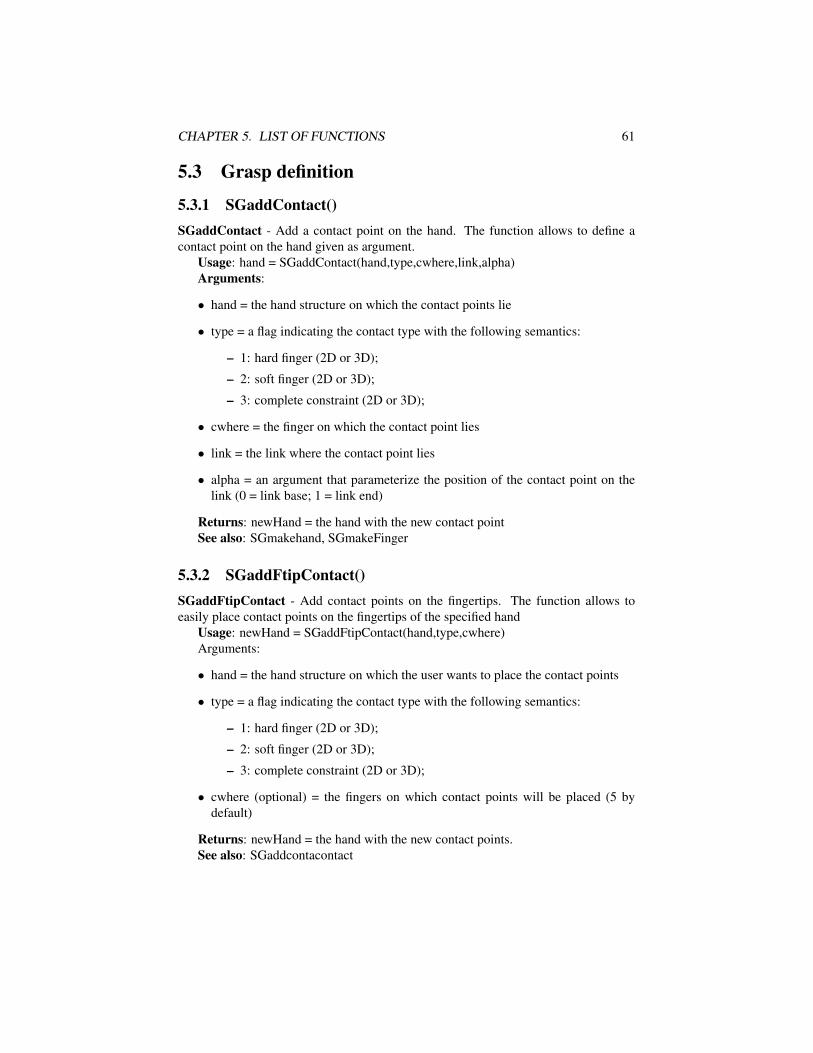
CHAPTER 5. LIST OF FUNCTIONS 61
5.3 Grasp definition
5.3.1 SGaddContact()SGaddContact - Add a contact point on the hand. The function allows to define acontact point on the hand given as argument.
Usage: hand = SGaddContact(hand,type,cwhere,link,alpha)Arguments:
• hand = the hand structure on which the contact points lie
• type = a flag indicating the contact type with the following semantics:
– 1: hard finger (2D or 3D);
– 2: soft finger (2D or 3D);
– 3: complete constraint (2D or 3D);
• cwhere = the finger on which the contact point lies
• link = the link where the contact point lies
• alpha = an argument that parameterize the position of the contact point on thelink (0 = link base; 1 = link end)
Returns: newHand = the hand with the new contact pointSee also: SGmakehand, SGmakeFinger
5.3.2 SGaddFtipContact()SGaddFtipContact - Add contact points on the fingertips. The function allows toeasily place contact points on the fingertips of the specified hand
Usage: newHand = SGaddFtipContact(hand,type,cwhere)Arguments:
• hand = the hand structure on which the user wants to place the contact points
• type = a flag indicating the contact type with the following semantics:
– 1: hard finger (2D or 3D);
– 2: soft finger (2D or 3D);
– 3: complete constraint (2D or 3D);
• cwhere (optional) = the fingers on which contact points will be placed (5 bydefault)
Returns: newHand = the hand with the new contact points.See also: SGaddcontacontact
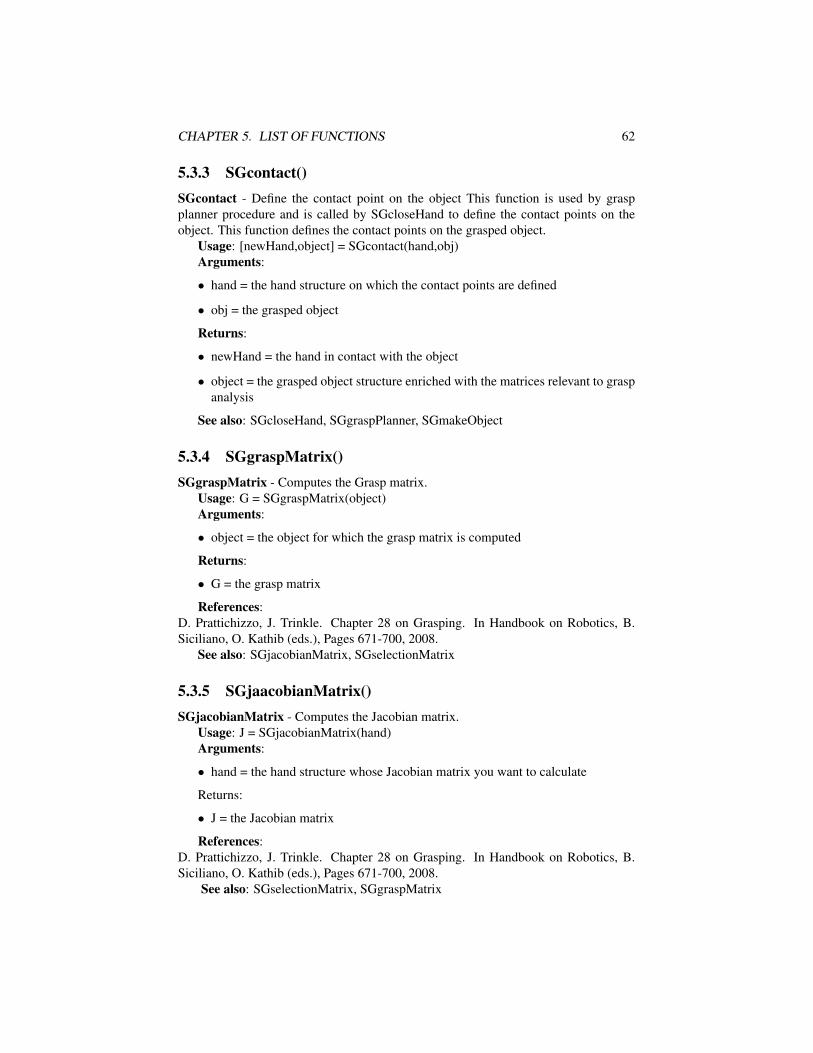
CHAPTER 5. LIST OF FUNCTIONS 62
5.3.3 SGcontact()SGcontact - Define the contact point on the object This function is used by graspplanner procedure and is called by SGcloseHand to define the contact points on theobject. This function defines the contact points on the grasped object.
Usage: [newHand,object] = SGcontact(hand,obj)Arguments:
• hand = the hand structure on which the contact points are defined
• obj = the grasped object
Returns:
• newHand = the hand in contact with the object
• object = the grasped object structure enriched with the matrices relevant to graspanalysis
See also: SGcloseHand, SGgraspPlanner, SGmakeObject
5.3.4 SGgraspMatrix()SGgraspMatrix - Computes the Grasp matrix.
Usage: G = SGgraspMatrix(object)Arguments:
• object = the object for which the grasp matrix is computed
Returns:
• G = the grasp matrix
References:D. Prattichizzo, J. Trinkle. Chapter 28 on Grasping. In Handbook on Robotics, B.Siciliano, O. Kathib (eds.), Pages 671-700, 2008.
See also: SGjacobianMatrix, SGselectionMatrix
5.3.5 SGjaacobianMatrix()SGjacobianMatrix - Computes the Jacobian matrix.
Usage: J = SGjacobianMatrix(hand)Arguments:
• hand = the hand structure whose Jacobian matrix you want to calculate
Returns:
• J = the Jacobian matrix
References:D. Prattichizzo, J. Trinkle. Chapter 28 on Grasping. In Handbook on Robotics, B.Siciliano, O. Kathib (eds.), Pages 671-700, 2008.
See also: SGselectionMatrix, SGgraspMatrix
CHAPTER 5. LIST OF FUNCTIONS 63
5.3.6 SGremoveContact()SGremoveContact - Remove a contact point on the hand
Usage: hand = SGaddContact(hand,finger,link,alpha)Arguments:
• hand = the hand structure on which the contact points lie
• finger = the finger on which the contact point lies
• link = the link where the contact point lies item alpha = an argument that pa-rameterize the position of the contact point on the link (0 = link base; 1 = linkend)
Returns:
• newHand = the hand without the specified contact point
See also: SGmakehand, SGmakeFinger, SGaddContact
5.3.7 SGselectionMatrix()SGselectionMatrix - Computes the Selection matrix
Usage: H = SGselectionMatrix(hand)Arguments:
• hand = the hand structure whose Selection matrix you want to calculate
Returns:
• H = the selection matrix
References:D. Prattichizzo, J. Trinkle. Chapter 28 on Grasping. In Handbook on Robotics, B.Siciliano, O. Kathib (eds.), Pages 671-700, 2008.
See also: SGjacobianMatrix, SGgraspMatrix

CHAPTER 5. LIST OF FUNCTIONS 64
5.4 Grasp quality metrics
5.4.1 SGdistSingularConfiguration()SGdistSingularConfiguration - grasp quality measures. Quality measures associatedwith the hand configuration. Distance to singular configurations.
This group of quality measures includes those that consider the hand configura-tion to estimate the grasp quality. In order to keep redundant fingers far from singularconfigurations, it is desirable to maximize the smallest singular value Smin of the ma-nipulator Jacobian. Therefore, by using SminHO as a quality measure, maximizingthe quality is equivalent to choose a grasp configuration far away from a singular one.Then: Q = SminHO. Where HO is the hand-object Jacobian.
Usage: [SminHO] = SGDistanceToSingularConfigurations (G,J)Arguments:
• G = grasp matrix
• J = hand jacobian matrix
Returns:
• SminHO = DistanceToSingularConfigurations
See also: SGmanipulEllipsoidVol,SGUnifTrans.
5.4.2 SGferrariCanny()SGferrariCanny - evaluates the Ferrari-Canny quality measure for a given grasp
This function evaluates a quality measures associated with a given grasp and specif-ically the Ferrari-Canny quality index
Usage: [VE] = SGferrariCanny(object, s, type,plot)Arguments:
• object = the object structure on which the grasp has to be evaluated s = numberof vertices of the pyramid approximating the friction cone
• plot = this boolean parameter determines if the computed convexhull and spherewill be plotted or not
Returns:
• R = the radius of the maximum-volume sphere that can be inscribed in the con-vexhull
See also: SGuniTransf, SGminSVG.References: Miller, A. T., & Allen, P. K. (1999). ”Examples of 3D grasp quality
computations”. In Robotics and Automation, 1999. Proceedings. 1999 IEEE Interna-tional Conference on (Vol. 2, pp. 1240-1246). IEEE.

CHAPTER 5. LIST OF FUNCTIONS 65
5.4.3 SGgraspIsotropyIndex()SGgraspIsotropyIndex - grasp quality measures.
Quality measures associated with the position of the contact points. Measures basedon algebraic properties of the grasp matrix G. Grasp isotropy index.
This criterion looks for an uniform contribution of the contact forces to the totalwrench exerted on the object, i.e. tries to obtain an isotropic grasp where the mag-nitudes of the internal forces are similar. The quality measure, called grasp isotropyindex, is defined as: Q=SminGSmaxG where SminG and SmaxG are the minimum andmaximum singular value of G. This index approaches to 1 when the grasp is isotropic(optimal case), and falls to zero when the grasp is close to a singular configuration.
Usage: [Ii] = SGgraspIsotropyIndex (G) Arguments:
• G = grasp matrix
Returns:
• Ii = Grasp isotropy index.
See also: SGminSVG, SGwrenchEllips.
5.4.4 SGmanipEllisoidVolume()SGmanipEllisoidVolume - evaluates the hand manipulability ellipsoid volume. Thisfunction evaluates a quality measures associated with the hand configuration and specif-ically the volume of the manipulability ellipsoid. This group of quality measures in-cludes those that consider the hand configuration to estimate the grasp quality. In orderto consider all the singular values of HO, the volume of the manipulability ellipsoidis proposed as quality measure. Let S1HOm S2HO, etc.be the singular values of HO.The grasp quality (i.e. the volume of the manipulability ellipsoid) is;
Q = kb√
detHO(HOT) = kb∗ (S1HO∗S2HO∗ ....∗SrHO)
where kb is a constant. The quality is therefore proportional to the product of all thesingular values, and maximizing the determinant of HO(HO)T maximizes the volumeof the ellipsoid.
Usage: [VE] = SGManipEllipsoidVolume(G,J) Arguments:
• G = grasp matrix
• J = hand jacobian matrix
Returns:
• VE = Volume Of The Manipulability Ellisoid
See also: SGuniTransf, SGminSVG.

CHAPTER 5. LIST OF FUNCTIONS 66
5.4.5 SGminSVG()SGminSVG - evaluate the minimum singular value of matrix G
This function evaluates the minimum singular value of matrix G, this parameter isadopted in the literature to evaluate grasp quality.
A full-rank grasp matrix G has d singular values given by the positive square rootsof the eigenvalues of GG′. When a grasp is in a singular configuration (i.e. whenat least one degree of freedom is lost due to hand configuration), at least one of thesingular values goes to zero. The smallest singular value of the grasp matrix G, SminG,is a quality measure that indicates how far is the grasp configuration from falling intoa singular configuration, this is: Q = SminG. The largest SminG, the better the grasp. Atthe same time the largest the SminG the largest the minimum transmission gain from theforces λ at the contact points to the net wrench w on the object, which is also used asgrasp optimization criterion.
Usage: [SminG] = MinimumSingularValueOfG (G)Arguments:
• G = grasp matrix
Returns:
• SminG = Minimum singular value of G
See also: SGuniTransf, SGmanipEllipsoidVolume.
5.4.6 SGunifTransfSGunifTransf - grasp quality measures. Quality measures associated with the handconfiguration -Uniformity of transformation.
This quality measure function considers hand configuration. The transformationbetween the velocity domain in the finger joints and the velocity domain of the ob-ject is ”uniform” when the contribution of each joint velocity is the same in all thecomponents of object velocity.
The quality measure is given by:
Q = SmaxHO/SminHO
i.e. the ratio between the maximum and minimum singular values of matrix HO. Thequality of a grasp will be better when the grasp configuration gives Q as close as pos-sible to 1.
Usage: [Ut] = SGunifTransf(G,J)Arguments:
• G = grasp matrix
• J = hand jacobian matrix
Returns:
• Ut = Uniformity Of Transformation measure
See also: SGdistSingularConfigurations, SGmanipEllisoidVolume.
CHAPTER 5. LIST OF FUNCTIONS 67
5.5 Grasp planner
5.5.1 SGcloseHand ()SGcloseHand - close a hand
Usage: [[newHand,object] = SGcloseHand(hand,obj,activeJoints,increment)Arguments:
• hand = the hand structure on which the contact points lie
• obj = the object structure to be grasped
• activejoint = a table specifying the joint activated during the hand closing
• increment = joint variable increment during the closing procedure
Returns:
• newhand = the hand in the new configuration
• object = the grasped object
See also: SGgenerateCloud, SGevaluateOffset, SGgraspPlanner
5.5.2 SGevaluateOffset ()SGevaluateOffset - Used by SGgraspPlanner
The function allows to compute the initial positions of the hands in the grasp plan-ning. Usage: offset = SGevaluateOffset(hand)
Arguments:
• hand = the hand structure on which the contact points lie
Returns:
• offeser = the offeset need to correctly place the hand
See also: SGgenerateCloud, SGevaluateOffset, SGgraspPlanner
5.5.3 SGgraspPlannerSGgraspPlanner - Synthesis of a grasp for a given couple hand-object
The function allows to define the best grasp given an object, the number of pregrasppositions of the hand and the quality metric to be used for for grasp evaluation.
Usage: [hand c,object,BEST INDEX] = SGgraspPlanner(hand,obj,N,qmtype)Arguments:
• hand = the hand structure on which the contact points lie
CHAPTER 5. LIST OF FUNCTIONS 68
• obj = the object structure to be grasped
• N = the number of random pregrasp positions of the hand
• qmtype = the quality metric to be used for grasp evaluation
Returns:
• hand c = the best hand configuration
• object = the grasped object
• BEST INDEX = the best quality index obtained
See also: SGgenerateCloud, SGevaluateOffset, SGcloseHand
CHAPTER 5. LIST OF FUNCTIONS 69
5.6 Modeling
5.6.1 SGactivateSynergies()SGactivateSynergies - Activate a synergy or a combination of synergies on the hand
Usage: hand = SGactivateSynergies(hand,z)The function allows to move the hand given as argument along a synergy or a
combination of synergies.Arguments:
• hand = the hand on which the synergies specified in z must be activated
• z = the synergy activation vector
Returns:
• newHand = the hand in the new configuration
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of
grasping hands with postural synergies. In Robotics: Science and Systems VI, pp.49-56, The MIT Press, Zaragoza, Spain, June 2011
M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand syner-gies in the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252, 2011
See also: SGdefineSynergies
5.6.2 SGblockJoints()SGblockJoints - The function blocks the selected joints on a hand
Usage: hand = SGblockJoints(hand,joints)Arguments:
• hand: structure containing hand information
• joints: joints to be locked
Returns:
• newHand = the updated hand structure
See also: SGmoveHand
CHAPTER 5. LIST OF FUNCTIONS 70
5.6.3 SGcontactStiffness()SGcontactStiffness - Defines a stiffness matrix for the contact points of the hand
The function allows to define a stiffness matrix for the contact points defined onthe object given as argument
Usage: new object = SGcontactStiffness(object,stiffness)Arguments:
• object = the object on which the contact points are defined
• stiffness= the stiffness values. This argument could be a scalar or a matrix withte following semantics:
– scalar: the stiffness matrix will be a diagonal matrix with this value on themain diagonal
– matrix: the stiffness matrix will be equal to this matrix
Returns:
• new object = the object with the desired contact stiffness
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of
grasping hands with postural synergies. In Robotics: Science and Systems VI, pp.49-56, The MIT Press, Zaragoza, Spain, June 2011
M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand syner-gies in the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252, 2011
See also: SGjointStiffness, SGsynergyStiffness
5.6.4 SGdefineSynergies()SGdefineSynergies - Defines a Synergy matrix for the hand
The function allows to define a synergy matrix for the hand structure given as inputargument. It creates the hand strucures fields hand.S and hand.JS that are respectivelythe synergy matrix and the underactuated Jacobian matrix.
Usage: hand = SGdefineSynergies(hand,S,qm)Arguments:
• hand = the hand structure on which the user is defining the synergy matrix
• S = the synergy matrix
• qm = avarage position of the hand
Returns:
• newHand = the hand embedding the desired Synergy matrix
CHAPTER 5. LIST OF FUNCTIONS 71
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of
grasping hands with postural synergies. In Robotics: Science and Systems VI, pp.49-56, The MIT Press, Zaragoza, Spain, June 2011
M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand syner-gies in the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252, 2011
See also: SGactivateSynergies
5.6.5 SGfingertips()SGfingertips - evaluates fingertip positions
This function, for a given hand, evaluates the fingertips coordinates (forward kine-matics of the hand)
Usage: ft = SGfingertips(hand)Arguments:
• hand = the hand structure which fingertip positions are computed
Returns:
• ft = a matrix whose columns represent the coordinates of the fingertips
See also: SGmakehand, SGmakeFinger
5.6.6 SGjointStiffness()SGjointStiffness - Defines a stiffness matrix for the joints of the hand
The function allows to define a stiffness matrix for the joints belonging to the handgiven as argument
Usage: newHand = SGjointStiffness(hand,stiffness)Arguments:
• hand = the hand structure to which the joints belong
• stiffness = the stiffness values. This argument could be a scalar or a matrix withte following semantics:
– scalar: the stiffness matrix will be a diagonal matrix with this value on themain diagonal
– matrix: the stiffness matrix will be equal to this matrix
Returns:
• newHand = the hand with the desired joint stiffness
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of
grasping hands with postural synergies. In Robotics: Science and Systems VI, pp.49-56, The MIT Press, Zaragoza, Spain, June 2011
CHAPTER 5. LIST OF FUNCTIONS 72
M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand syner-gies in the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252, 2011
See also: SGcontactStiffness, SGsynergystifness, SGquasistaticHsolution, SGforce-Manipulability
5.6.7 SGmakeFinger()SGmakeFinger - Create a finger
The function defines a finger structure from given argumentsUsage: finger = SGmakeFinger(DHpars, base, q)Arguments:
• DHpars = n (number of joints) x 4 matrix containing Denavit Hartenberg param-eters for each joint
• base = 4 x 4 homogeneous transformation matrix for the finger frame
• q = n x 1 vector containing values of joint variables
Returns:
• finger = the finger structure
See also: SGmakeHand
5.6.8 SGmakeHand()SGmakehand - Create a hand
The function define a hand structureUsage: hand = SGmakehand(F)Arguments:
• F = array of finger structures defined by SGmakeFinger
Returns:
• hand = the hand structure
See also: SGmakeFinger
5.6.9 SGmakeObject()SGmakeObject - create an object structure for a given hand
This function defines a structure object, given the contact points on the hand, theobject center (opt) and the contact normal directions.
Usage: [newHand,object] = SGmakeObject(hand,center,normals) Arguments:
• hand: a structure defining the hand structure
CHAPTER 5. LIST OF FUNCTIONS 73
• center(opt): object center coordinates
• normals: directions normal to the contact surface in the contact points
Returns:
• newhand: an updated structure of the hand
• object: a structure containing object data
See also: SGmakeHand, SGgraspMatrix, SGselectionMatrix
5.6.10 SGmoveHand()SGmoveHand - Move a hand
The function move the finger joint imposing a displacement q. Returns the hand inthe new configuration.
Usage: hand = SGmoveHand(hand,q)Arguments:
• hand = the hand structure to move
• q = the joint variables of the new hand configuration
• plot = this argument allows the user to plot the resulting movement of the handwith the following semantic:
– ’initfinal’ = the initial and final positions of the hand are plotted
– ’final’ = only the final position of the hand is plotted
Returns:
• hand = the hand in the new configuration
See also: SGmakehand, SGmakeFinger
5.6.11 SGsynergyStiffness()SGsynergyStiffness - Defines a stiffness matrix for the synergies of the hand
The function allows to define a stiffness matrix for the synergies defined on thehand given as argument
Usage: hand = SGsynergyStiffness(hand,stiffness)Arguments:
• hand = the hand on which the synergy matrix is defined
• stiffness = the stiffness values. This argument could be a scalar or a matrix withte following semantics:
– scalar: the stiffness matrix will be a diagonal matrix with this value on themain diagonal
CHAPTER 5. LIST OF FUNCTIONS 74
– matrix: the stiffness matrix will be equal to this matrix
Returns:
• newHand = the hand with the desired synergy activation stiffness
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of
grasping hands with postural synergies. In Robotics: Science and Systems VI, pp.49-56, The MIT Press, Zaragoza, Spain, June 2011
M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand syner-gies in the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252, 2011
See also: SGactivateSynergies
5.6.12 SGunblockjoints()SGunblockjoints - The function activates the selected joints on a hand
Usage: hand = SGunblockjoints(hand,joints)Arguments:
• hand: structure containing hand information
• joints: joints to be unlocked
Returns:
• hand: updated hand structure
See also: SGblockJoints
5.6.13 SGwristStiffness()SGwristStiffness - Defines a six dimensional stiffness matrix for the wrist
The function allows to define a stiffness matrix for the wrist belonging to the handgiven as argument
Usage: newHand = SGjointStiffness(hand,stiffness)Arguments:
• hand = the hand structure to which the joints belong
• stiffness = the stiffness values. This argument could be a scalar or a matrix withte following semantics:
– scalar: the stiffness matrix will be a six dimensional diagonal matrix withthis value on the main diagonal
– matrix: the stiffness matrix will be equal to this matrix
Returns:
CHAPTER 5. LIST OF FUNCTIONS 75
• newHand = the hand with the desired wrist stiffness
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of
grasping hands with postural synergies. In Robotics: Science and Systems VI, pp.49-56, The MIT Press, Zaragoza, Spain, June 2011
M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand syner-gies in the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252, 2011
See also: SGcontactStiffness, SGsynergystifness, SGjointstifness, SGquasistaticH-solution, SGforceManipulability

CHAPTER 5. LIST OF FUNCTIONS 76
5.7 Sample hands
5.7.1 SG3Fingered()SG3Fingered - a three fingered robotic hand
The function builds the three fingered hand model inspired by the Barrett HandUsage: hand = SG3FingeredArguments:
• -
Returns:
• hand = the hand structure
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of
grasping hands with postural synergies. In Robotics: Science and Systems VI, pp.49-56, The MIT Press, Zaragoza, Spain, June 2011
M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand syner-gies in the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252, 2011
See also: SGparadigmatic, SGDLRHandII, SGhuman24, SGmodularHand, SGun-deractuated1
5.7.2 SGDLRHandII()SGDLRHandII - model of the DLR hand II
The function builds the model of the DLR hand IIUsage: hand = SGDLRHandIIArguments:
• -
Returns:
• hand = the hand structure
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of
grasping hands with postural synergies. In Robotics: Science and Systems VI, pp.49-56, The MIT Press, Zaragoza, Spain, June 2011
M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand syner-gies in the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252, 2011
See also: SGparadigmatic, SG3fingered, SGhuman24, SGmodularHand, SGunder-actuated1
CHAPTER 5. LIST OF FUNCTIONS 77
5.7.3 SGhuman24()SGhuman24 - a 24 DoF model of the human hand
The function builds the 24 DoF model of an anthropomorphic handUsage: hand = SGhuman24Arguments:
• -
Returns:
• hand = the hand structure
References:S. Cobos, M. Ferre, M. A. Sanchez-Urun, J. Ortego and R. Aracil. ”Human hand
descriptions and gesture recognition for object manipulation”. Computer Methods inBiomechanics and Biomedical Engineering , Vol. 13, No. 3, pp. 305 - 317, 2009.
See also: SGparadigmatic, SG3fingered, SGDLRHandII, SGmodularHand, SGun-deractuated1
5.7.4 SGmodularHand()SGmodularhand - the model of a three-fingered, 9 DoF modular hand
The function builds the model of a three-fingered, 9 DoF modular handUsage: hand = SGmodularHandArguments:
• -
Returns:
• hand = the hand structure
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of
grasping hands with postural synergies. In Robotics: Science and Systems VI, pp.49-56, The MIT Press, Zaragoza, Spain, June 2011
M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand syner-gies in the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252, 2011
See also: SGparadigmatic, SG3fingered, SGDLRHandII, SGhuman24, SGunder-actuated1
5.7.5 SGparadigmatic()SGparadigmatic - a 20 DoF model of the human hand
The function builds the 20 DoF model of an anthropomorphic handUsage: hand = SGparadigmaticArguments:
CHAPTER 5. LIST OF FUNCTIONS 78
• -
Returns:
• hand = the hand structure
References:S. Cobos, M. Ferre, M. A. Sanchez-Urun, J. Ortego and R. Aracil. ”Human hand
descriptions and gesture recognition for object manipulation”. Computer Methods inBiomechanics and Biomedical Engineering , Vol. 13, No. 3, pp. 305 - 317, 2009.
See also: SGparadigmatic, SG3fingered, SGDLRHandII, SGmodularHand, SGun-deractuated1
5.7.6 SGunderActuated1()SGunderActuated1 - model of an underactuated robotic hand
The function builds the model of an underactuated robotic handUsage: hand = SGunderactuated1Arguments:
• -
Returns:
• hand = the hand structure
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of
grasping hands with postural synergies. In Robotics: Science and Systems VI, pp.49-56, The MIT Press, Zaragoza, Spain, June 2011
M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand syner-gies in the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252, 2011
See also: SGparadigmatic, SG3fingered, SGDLRHandII, SGmodularHand
CHAPTER 5. LIST OF FUNCTIONS 79
5.8 Utils
5.8.1 SGCFtau()SGCFtau - Cost function that takes into account hand joint torques
This function evaluates cost function that takes into account hand joint torquesUsage: cost = SGCFtau(deltaz,hand,w,Kjoint)The function allows to move the hand given as argument along a synergy or a
combination of synergies.Arguments:
• deltazr = synergy reference variation
• hand = the hand structure
• object = the object structure
• w = external load
Returns:
• cost = cost function value
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of
grasping hands with postural synergies. In Robotics: Science and Systems VI, pp.49-56, The MIT Press, Zaragoza, Spain, June 2011
M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand syner-gies in the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252, 2011
See also:
5.8.2 SGcheckAngle()SGcheckAngle - check angles between contact forces and contact normals
This function evaluates the angles between contact forces and contact normal unitvectors
Usage: out = SGcheckAngle(w,y,pG,E,n)The function allows to move the hand given as argument along a synergy or a
combination of synergies.Arguments:
• w = external load
• y = coefficients for the linear combination of E columns
• pG = grasp matrix pseudoinverse
• E = controllable internal force subspace
• n = contact normal (matriz 3xnc)
CHAPTER 5. LIST OF FUNCTIONS 80
Returns:
• out.theta = vector containing for each contact the angle between contact forceand contact normal
• out.Theta = sum of contact angles
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of
grasping hands with postural synergies. In Robotics: Science and Systems VI, pp.49-56, The MIT Press, Zaragoza, Spain, June 2011
M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand syner-gies in the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252, 2011
5.8.3 SGcontactDetection()SGcontactDetection - Detects a contact between the hand and the object
Usage: cp mat = SGcontactDetection(hand,struct,i)Arguments:
• hand,struct = hand and object structures
• i = finger that is moving
Returns:
• cp mat = matrix with the contact points
5.8.4 SGcube()SGcube - function that calculates cube data organized as a structure.
Function that calculates main data of a cylinder needed by grasping-related appli-cations.
Usage: struct = SGcube(Htr,a,b,c)Arguments:
• Htr = 4x4 homogeneous transformation describing cube position and orientation
• a,b,c = cube edge lengths
Returns:
• struct = a structure containing cube faces, cube vertex, face normals and face midpoints
See also: SGcloseHand, SGgraspPlanner, SGmakeObject

CHAPTER 5. LIST OF FUNCTIONS 81
5.8.5 SGcylinder()Function that calculates main data of a cylinder needed by grasping-related applica-tions.
Usage: out = SGcylinder(Htr,h,rad,shape,res)Arguments:
• Htr = Homogeneous transformation
• h = height of the cylinder
• rad = radius
• shape = vector of linearly spaced percents of radius over height (more entries =better resolution)
• res = number of points around circumference
Returns:
• out = cylinder structure
See also: SGsphere, SGcube
5.8.6 SGDHMatrix()SGDHMatrix - Computes the Denavitt-Hartenberg homogeneous transformation ma-trix
The function computes the D-H homogeneous transformation matrix following theclassical D-H convention
Usage: H = SGDHMatrix(v)Arguments:
• v = a row of the matrix DHpars of a finger structure containing the D-H param-eters
Returns:
• H = the D-H homogeneous transformation matrix
See also: SGsphere, SGcube
5.8.7 SGdrawCube()SGdrawCube- Draws a cube whose parameters are defined in the structure struct
Usage: SGdrawCube(struc) Arguments:
• struc = a structure defined with the function SGcube

CHAPTER 5. LIST OF FUNCTIONS 82
5.8.8 SGdrawCylinder()SGdrawCylinder- Draws a cylinder whose parameters are defined in the structurestruct
Usage: SGdrawCylinder(struc) Arguments:
• struc = a structure defined with the function SGcube
5.8.9 SGdrawPen()SGdrawPen- Draws a pen for the handwriting examplet
Usage: pen=SGdrawPen(H,h,rad,res) Arguments:
• H = a 4x4 homogeneous transformation defining position and orientation of thehand
• h = pen height
• rad = hand radius
• res = resolution for graphical representation
5.8.10 SGdrawSphere()SGdrawSphere- Draws a sphere whose parameters are defined in the structure struct
Usage: SGdrawSphere(struc) Arguments:
• struc = a structure defined with the function SGsphere
5.8.11 SGfaceDetector()SGfaceDetector - Define the contact point on the object
This function is used by grasp planner procedure and is called by SGcloseHand todefine the contact points on the object
Usage: face = SGfaceDetector(CP,obj)Arguments:
• CP = contact point coordinates
• obj = the grasped object
Returns:
• face = an index varying from 1 to 6 indicating the cube face closest to the contactpoint
See also: SGcloseHand, SGgraspPlanner, SGmakeObject
CHAPTER 5. LIST OF FUNCTIONS 83
5.8.12 SGgenerateCloud()This function generates a cloud of N points along a sphere with center given by ob-ject’s matrix H, with gauge G. Then creates an array of Homogeneous transformationmatrices for hand pose P is a 4*4*N matrix Sigma-World R.F.
5.8.13 SGgTildeMatrix()SGgTildeMatrix - Computes the Gtilde matrix
The function computes the Gtilde matrix for the given contact points and objectcenter
Usage: Gtilde = SGgTildeMatrix(cp,ob)Arguments:
• cp = the matrix containing the contac points locations
• ob = the center coordinates of the object to grasp
See also: SGjacobianMatrix, SGselectionMatrix, SGgraspMatrix
5.8.14 SGhMatrix()SGhMatrix - Computes the Selection matrix
This function is used by SGselectionMatrix to build the H matrixUsage: [H] = SGhMatrix(cn, ct)Arguments:
• cn = normals to contact points
• Ct = type of contact:
– 1: hard finger (2D or 3D);
– 2: soft finger (2D or 3D);
– 3: complete constraint (2D or 3D);
See also: SGselectionMatrix
5.8.15 SGindexReduction()Auxiliary function for SGintSegCube - index remapping function.
5.8.16 SGintSegCube()This is an auxiliary function splitting the cube into its faces, retrieving vertices.
CHAPTER 5. LIST OF FUNCTIONS 84
5.8.17 SGintSegCyl()This function evaluates contact between a segment and a cylinder, returning the corre-sponding alpha parameter as the normalized position: alpha = 0 means the first point,alpha = 1 means the second, if there aren’t any contact points, alpha = NaN. epsiloncould be absolute or radius-relative.
Usage: alpha = SGintSegCyl(seg,cyl,epsilon)Arguments:
• seg: a structure containing the points defining the segment,
• cyl: a structure defining the cylinder
• epsilon: tolerance
5.8.18 SGintSegSph()This function evaluates contact between a segment and a cylinder, returning the corre-sponding alpha parameter as the normalized position: alpha = 0 means the first point,alpha = 1 means the second, if there aren’t any contact points, alpha = NaN. epsiloncould be absolute or radius-relative.
Usage: alpha = SGintSegCyl(seg,cyl,epsilon)Arguments:
• seg: a structure containing the points defining the segment,
• sph: a structure defining the sphere
• epsilon: tolerance
5.8.19 SGisFinger()This function checks whether or not passed parameter is a finger.
Usage: isf = SGisFinger(finger)Argument:
• finger: a structure containing finger parameters
Returns:
• isf: a parameter that assumes value 1 if the structure is a finger and 0 otherwise.
5.8.20 SGisHand()This function checks whether or not passed parameter is a hand structure.
Usage: ish = SGisHand(hand)Argument:
• hand: a structure containing hand parameters
Returns:
• ish: a parameter that assumes value 1 if the structure is a hand and 0 otherwise.
CHAPTER 5. LIST OF FUNCTIONS 85
5.8.21 SGisMatrix()This is an auxiliary function that check if the passed input is a matrix or not.
Usage: ism = SGisMatrix(M)Argument:
• M: a generic matrix
Returns:
• ism: a parameter that assumes value 1 if the structure is a matrix and 0 otherwise.
5.8.22 SGisObject()SGisObject This is an auxiliary function that check if the passed input is an objectstructure or not.
Usage: isob = SGisObject(object)Argument:
• object: a generic structure
Returns:
• isob: a parameter that assumes value 1 if the structure is an object and 0 other-wise.
5.8.23 SGisSeg()SGisSeg -This is an auxiliary function that check if the passed input is a segmentstructure or not.
Usage: isseg = SGisSeg(segment)Argument:
• segment: a generic structure
Returns:
• isseg: a parameter that assumes value 1 if the structure is a segment and 0 other-wise.
5.8.24 SGisVector()SGisVector -This is an auxiliary function that check if the passed input is a vector ornot.
Usage: isv = SGisVector(v)Argument:
• v: a generic variable
Returns:
• isv: a parameter that assumes value 1 if the structure is a vector and 0 otherwise.
CHAPTER 5. LIST OF FUNCTIONS 86
5.8.25 SGjoints()SGjoints This is an auxiliary function that updates the positions of the joints in thefinger structure
Usage: newHand = SGjoints(hand)Argument:
• hand: a generic hand structure
Returns:
• newhand: the updated hand structure.
5.8.26 SGlinkIntersection()SGlinkIntersection - This is an auxiliary function that evaluates the intersection be-tween the axis of a generic link, defined by a segment, and an object
Usage: alpha = SGlinkIntersection(seg,struct2,epsilon)Argument:
• seg: a generic segment structure
• struc2: a generic object structure (sphere, cylinder or cube)
• epsilon: tolerance
Returns:
• alpha: a parameter indicating the position of the intersection on the link axis.
5.8.27 SGplotCube()SGplotCube - This is an auxiliary function that plots a cube with the given parameterson the current plot
Usage: SGplotCube(cube)Argument:
• cube: a cube structure
Returns:
• add the plot of the cube in the current figure.
5.8.28 SGplotCylinder()SGplotCylinder - This is an auxiliary function that plots a cylinder with the givenparameters on the current plot
Usage: SGplotCylinder(cylinder)Argument:
• cylinder: a cylinder structure
Returns:
• add the plot of the cylinder in the current figure.
CHAPTER 5. LIST OF FUNCTIONS 87
5.8.29 SGplotSeg()SGplotSeg -This is an auxiliary function that plots a segment with the given parameterson the current plot
Usage: SGplotSeg(seg)Argument:
• seg: a segment structure
Returns:
• add the plot of the segment in the current figure.
5.8.30 SGplotSolid()SGplotSolid - This is an auxiliary function that plots a generic solid (sphere, cylinderor cube) with the given parameters on the current plot
Usage: SGplotSolid(solid)Argument:
• solid: a solid(sphere, cylinder or cube) structure
Returns:
• add the plot of the solid in the current figure.
5.8.31 SGplotSphere()SGplotSphere - This is an auxiliary function that plots a sphere with the given param-eters on the current plot
Usage: SGplotSphere(sphere)Argument:
• sphere: a sphere structure
Returns:
• add the plot of the sphere in the current figure.
5.8.32 SGpointInCube()SGpointInCube - This is an auxiliary function that checks if a generic point is insidea given cube solid structure or not.
Usage: res = SGpointInCube(p,cube)Argument:
• p: a three dimensional vector containing the coordinates of a generic point
• cube: a cube structure
Returns:
• res: an integer variable assuming value 1 if the point is inside the cube and 0otherwise.
CHAPTER 5. LIST OF FUNCTIONS 88
5.8.33 SGpointInCylinder()SGpointInCylinder - This is an auxiliary function that checks if a generic point isinside a given cylinder solid structure or not.
Usage: res = SGpointInCylinder(p,cyl)Argument:
• p: a three dimensional vector containing the coordinates of a generic point
• cyl: a cylinder structure
Returns:
• res: an integer variable assuming value 1 if the point is inside the cylinder and 0otherwise.
5.8.34 SGpointInSphere()SGpointInSphere - This is an auxiliary function that checks if a generic point is insidea given sphere solid structure or not.
Usage: res = SGpointInSphere(p,sph)Argument:
• p: a three dimensional vector containing the coordinates of a generic point
• sph: a sphere structure
Returns:
• res: an integer variable assuming value 1 if the point is inside the sphere and 0otherwise.
5.8.35 SGrotx()SGrotx - evaluates rotation matrix corresponding to a rotation along x axis
Usage: R= SGrotx(x)Argument:
• x: the rotation angle (in radians)
Returns:
• R: the 3x3 rotation matrix
See also: SGroty, SGrotz, SGtransl
CHAPTER 5. LIST OF FUNCTIONS 89
5.8.36 SGroty()SGroty - evaluates rotation matrix corresponding to a rotation along x axis
Usage: R= SGroty(y)Argument:
• y: the rotation angle (in radians)
Returns:
• R: the 3x3 rotation matrix
See also: SGrotx, SGrotz, SGtransl
5.8.37 SGrotz()SGrotz - evaluates rotation matrix corresponding to a rotation along z axis
Usage: R= SGrotz(z)Argument:
• z: the rotation angle (in radians)
Returns:
• R: the 3x3 rotation matrix
See also: SGrotx, SGroty, SGtransl
5.8.38 SGsantelloSynergies()SGsantelloSynergies - This function loads synergy and mean configuration data forthe 20 DoF model of the human hand.
Usage: [qm, S] = SGsantelloSynergiesReturns:
• qm: a 20x1 vector containing joint angles in the mean configuration
• S: a 20x15 matrix containing postural synergies obtained from a PCA on exper-imental data.
References:D. Prattichizzo, M. Malvezzi, A. Bicchi. On motion and force controllability of
grasping hands with postural synergies. In Robotics: Science and Systems VI, pp.49-56, The MIT Press, Zaragoza, Spain, June 2011
M. Gabiccini, A. Bicchi, D. Prattichizzo, M. Malvezzi. On the role of hand syner-gies in the optimal choice of grasping forces. Autonomous Robots, Springer, 31:235-252, 2011
M. Santello, M. Flanders, and J. F. Soechting, Postural hand synergies for tool use,The Journal of Neuroscience, vol. 18, pp. 1010510115, December 1998.
CHAPTER 5. LIST OF FUNCTIONS 90
5.8.39 SGsegment()SGsection - Creates a segment structure for two given points
This function, given the coordinates of two generic points, creates a segment struc-ture.
Usage: struc = SGsegment(p0,p1)Arguments:
• p0, p1: two three dimensional vectors defining the coordinates of segment ex-treme points
Returns:
• struc: a structure variable defining the segment, whose fields are
– struc.p1: initial point– struc.p2: final point– struc.type: a string variable whose value is ’seg’
See also: SGisSeg, SGintSegCube, SGintSegSph, SGintSegCyl.
5.8.40 SGskew()SGskew - Computes the Skew matrix.
The function computes the Skew matrix of a given vectorUsage: S = SGskew(t)Arguments:
• t = 3 x 1 or 1 x 3 vector
Returns::
• S: a 3x3 skew matrix corresponding to vector t.
See also: SGrotx, SGroty, SGrotz
5.8.41 SGsphere()SGsphere - Generates a spherical object
This function calculates main data of a sphere used by grasping-related applica-tions.
Usage: struct = SGsphere(Htr,rad,res)Arguments:
• H = homogeneous transformation
• rad = radius
• res = number of points on the external surface
Returns:
• struc: a structure containing sphere parameters
See also: SGgenerateCloud, SGcloseHand, SGevaluateOffset
CHAPTER 5. LIST OF FUNCTIONS 91
5.8.42 SGtransl()SGtransl - Evaluate the homogeneous transformation matrix corresponding to a trans-latiion
Usage: T = SGtransl(p)Arguments:
• p: a three dimensional vector specifying the components of the displacement
Returns:
• T: a 4x4 homogeneous matrix corresponding to the translation
See also: SGrotx, SGroty, SGrotz
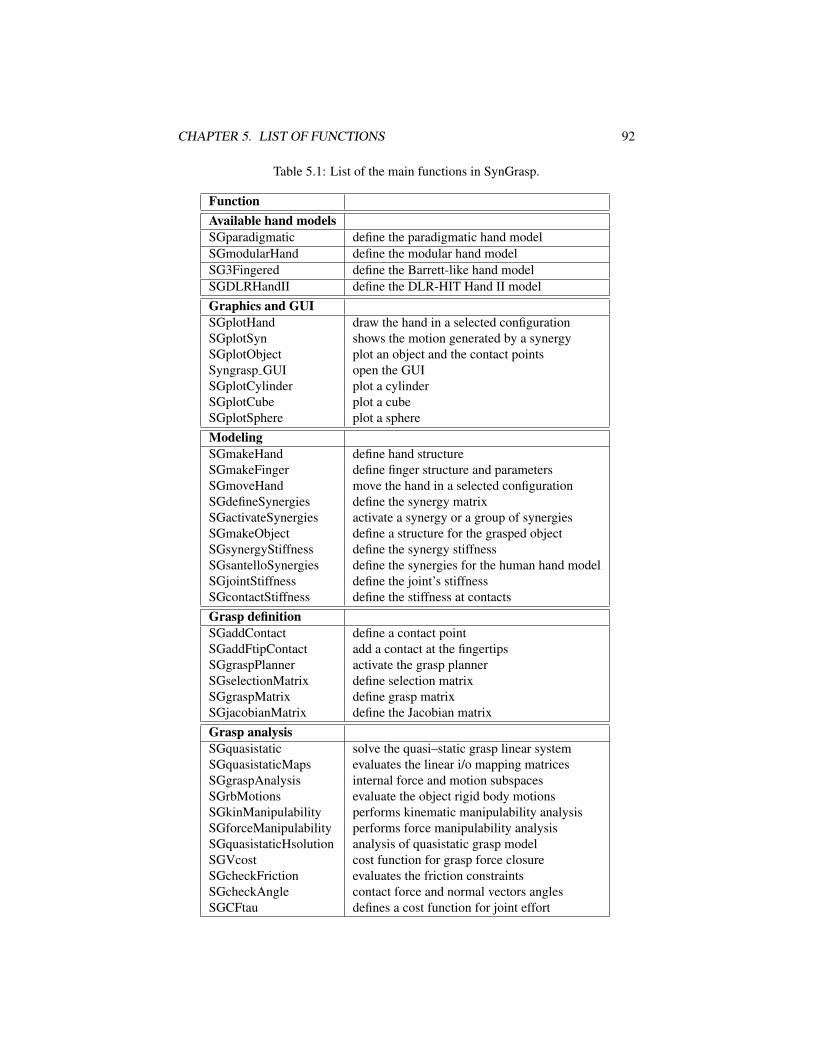
CHAPTER 5. LIST OF FUNCTIONS 92
Table 5.1: List of the main functions in SynGrasp.
FunctionAvailable hand modelsSGparadigmatic define the paradigmatic hand modelSGmodularHand define the modular hand modelSG3Fingered define the Barrett-like hand modelSGDLRHandII define the DLR-HIT Hand II modelGraphics and GUISGplotHand draw the hand in a selected configurationSGplotSyn shows the motion generated by a synergySGplotObject plot an object and the contact pointsSyngrasp GUI open the GUISGplotCylinder plot a cylinderSGplotCube plot a cubeSGplotSphere plot a sphereModelingSGmakeHand define hand structureSGmakeFinger define finger structure and parametersSGmoveHand move the hand in a selected configurationSGdefineSynergies define the synergy matrixSGactivateSynergies activate a synergy or a group of synergiesSGmakeObject define a structure for the grasped objectSGsynergyStiffness define the synergy stiffnessSGsantelloSynergies define the synergies for the human hand modelSGjointStiffness define the joint’s stiffnessSGcontactStiffness define the stiffness at contactsGrasp definitionSGaddContact define a contact pointSGaddFtipContact add a contact at the fingertipsSGgraspPlanner activate the grasp plannerSGselectionMatrix define selection matrixSGgraspMatrix define grasp matrixSGjacobianMatrix define the Jacobian matrixGrasp analysisSGquasistatic solve the quasi–static grasp linear systemSGquasistaticMaps evaluates the linear i/o mapping matricesSGgraspAnalysis internal force and motion subspacesSGrbMotions evaluate the object rigid body motionsSGkinManipulability performs kinematic manipulability analysisSGforceManipulability performs force manipulability analysisSGquasistaticHsolution analysis of quasistatic grasp modelSGVcost cost function for grasp force closureSGcheckFriction evaluates the friction constraintsSGcheckAngle contact force and normal vectors anglesSGCFtau defines a cost function for joint effort

Chapter 6
Conclusion
This guide presents the main features of SynGrasp, a MATLAB toolbox for the anal-ysis of human and robotic grasps in presence of underactuation and compliance. Thetoolbox functions were developed to allow a simple and intuitive analysis of the graspproperties, e.g. controllable force and motion, manipulability and grasp quality mea-sures, in both fully and underactuated robotic hands. The tool is designed to integratein the hand model a kinematic coupling between joints, as those provided in the syner-gistic organization of the human hand or due to the mechanical or control constraintsimplemented in the design of robotic hands. The possible applications of the SynGrasptoolbox range from the analysis of the human hand for studies in neuroscience, to thedesign and optimization of robot hands. The toolbox is developed as a collection ofMATLAB functions and does not require any external packages to be used. Its struc-ture is suitable for the integration with other tools, e.g. optimization, data analysis,dynamic simulations, 3D representation and animation. The toolbox provides severalutility functions for a simple graphical representation of the hand, the object, and themain analysis results.
93
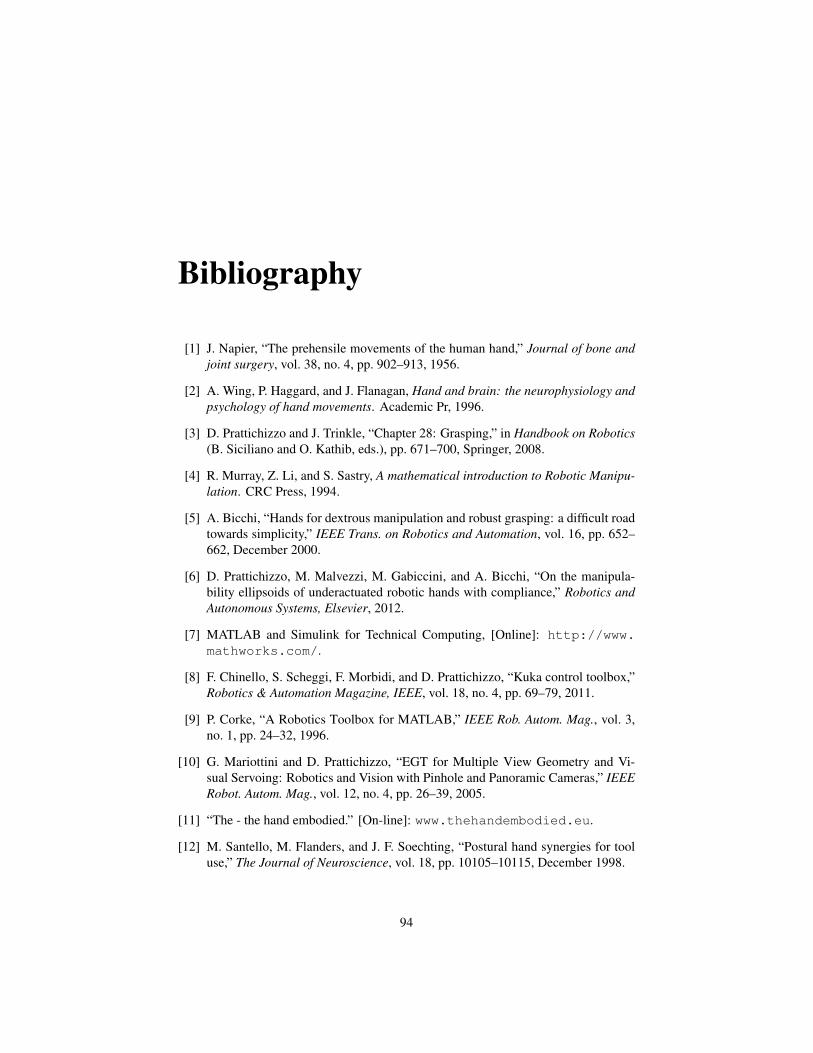
Bibliography
[1] J. Napier, “The prehensile movements of the human hand,” Journal of bone andjoint surgery, vol. 38, no. 4, pp. 902–913, 1956.
[2] A. Wing, P. Haggard, and J. Flanagan, Hand and brain: the neurophysiology andpsychology of hand movements. Academic Pr, 1996.
[3] D. Prattichizzo and J. Trinkle, “Chapter 28: Grasping,” in Handbook on Robotics(B. Siciliano and O. Kathib, eds.), pp. 671–700, Springer, 2008.
[4] R. Murray, Z. Li, and S. Sastry, A mathematical introduction to Robotic Manipu-lation. CRC Press, 1994.
[5] A. Bicchi, “Hands for dextrous manipulation and robust grasping: a difficult roadtowards simplicity,” IEEE Trans. on Robotics and Automation, vol. 16, pp. 652–662, December 2000.
[6] D. Prattichizzo, M. Malvezzi, M. Gabiccini, and A. Bicchi, “On the manipula-bility ellipsoids of underactuated robotic hands with compliance,” Robotics andAutonomous Systems, Elsevier, 2012.
[7] MATLAB and Simulink for Technical Computing, [Online]: http://www.mathworks.com/.
[8] F. Chinello, S. Scheggi, F. Morbidi, and D. Prattichizzo, “Kuka control toolbox,”Robotics & Automation Magazine, IEEE, vol. 18, no. 4, pp. 69–79, 2011.
[9] P. Corke, “A Robotics Toolbox for MATLAB,” IEEE Rob. Autom. Mag., vol. 3,no. 1, pp. 24–32, 1996.
[10] G. Mariottini and D. Prattichizzo, “EGT for Multiple View Geometry and Vi-sual Servoing: Robotics and Vision with Pinhole and Panoramic Cameras,” IEEERobot. Autom. Mag., vol. 12, no. 4, pp. 26–39, 2005.
[11] “The - the hand embodied.” [On-line]: www.thehandembodied.eu.
[12] M. Santello, M. Flanders, and J. F. Soechting, “Postural hand synergies for tooluse,” The Journal of Neuroscience, vol. 18, pp. 10105–10115, December 1998.
94
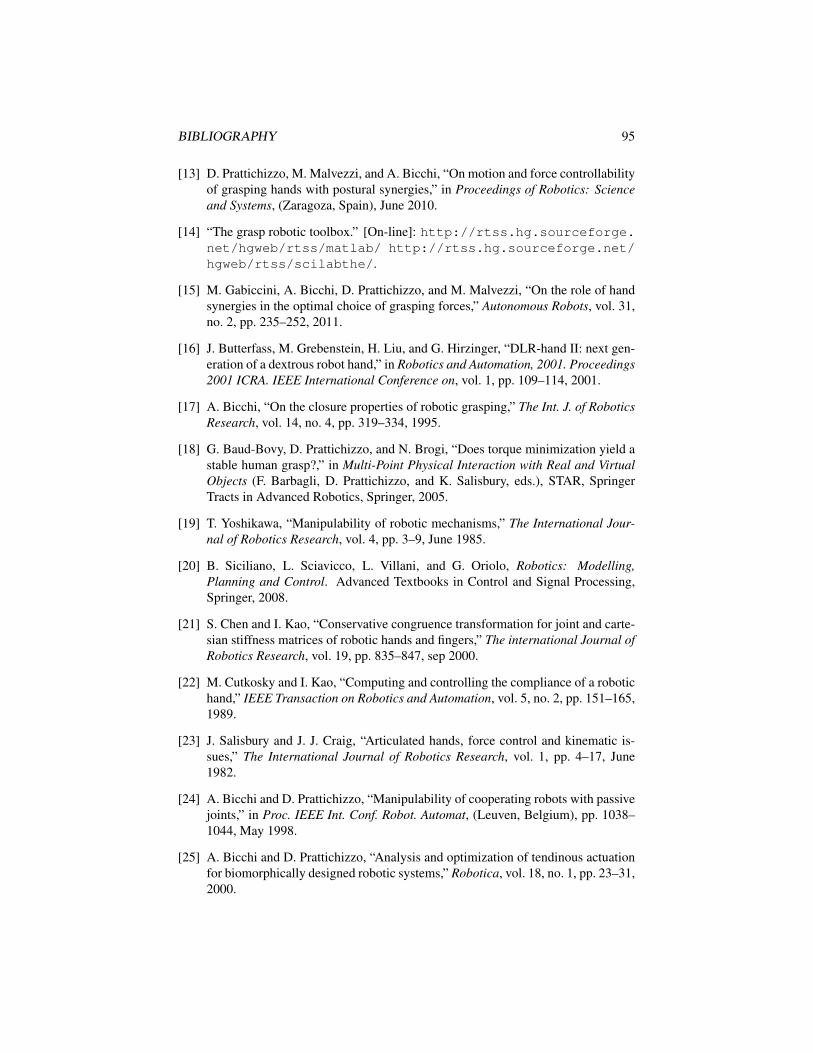
BIBLIOGRAPHY 95
[13] D. Prattichizzo, M. Malvezzi, and A. Bicchi, “On motion and force controllabilityof grasping hands with postural synergies,” in Proceedings of Robotics: Scienceand Systems, (Zaragoza, Spain), June 2010.
[14] “The grasp robotic toolbox.” [On-line]: http://rtss.hg.sourceforge.net/hgweb/rtss/matlab/ http://rtss.hg.sourceforge.net/hgweb/rtss/scilabthe/.
[15] M. Gabiccini, A. Bicchi, D. Prattichizzo, and M. Malvezzi, “On the role of handsynergies in the optimal choice of grasping forces,” Autonomous Robots, vol. 31,no. 2, pp. 235–252, 2011.
[16] J. Butterfass, M. Grebenstein, H. Liu, and G. Hirzinger, “DLR-hand II: next gen-eration of a dextrous robot hand,” in Robotics and Automation, 2001. Proceedings2001 ICRA. IEEE International Conference on, vol. 1, pp. 109–114, 2001.
[17] A. Bicchi, “On the closure properties of robotic grasping,” The Int. J. of RoboticsResearch, vol. 14, no. 4, pp. 319–334, 1995.
[18] G. Baud-Bovy, D. Prattichizzo, and N. Brogi, “Does torque minimization yield astable human grasp?,” in Multi-Point Physical Interaction with Real and VirtualObjects (F. Barbagli, D. Prattichizzo, and K. Salisbury, eds.), STAR, SpringerTracts in Advanced Robotics, Springer, 2005.
[19] T. Yoshikawa, “Manipulability of robotic mechanisms,” The International Jour-nal of Robotics Research, vol. 4, pp. 3–9, June 1985.
[20] B. Siciliano, L. Sciavicco, L. Villani, and G. Oriolo, Robotics: Modelling,Planning and Control. Advanced Textbooks in Control and Signal Processing,Springer, 2008.
[21] S. Chen and I. Kao, “Conservative congruence transformation for joint and carte-sian stiffness matrices of robotic hands and fingers,” The international Journal ofRobotics Research, vol. 19, pp. 835–847, sep 2000.
[22] M. Cutkosky and I. Kao, “Computing and controlling the compliance of a robotichand,” IEEE Transaction on Robotics and Automation, vol. 5, no. 2, pp. 151–165,1989.
[23] J. Salisbury and J. J. Craig, “Articulated hands, force control and kinematic is-sues,” The International Journal of Robotics Research, vol. 1, pp. 4–17, June1982.
[24] A. Bicchi and D. Prattichizzo, “Manipulability of cooperating robots with passivejoints,” in Proc. IEEE Int. Conf. Robot. Automat, (Leuven, Belgium), pp. 1038–1044, May 1998.
[25] A. Bicchi and D. Prattichizzo, “Analysis and optimization of tendinous actuationfor biomorphically designed robotic systems,” Robotica, vol. 18, no. 1, pp. 23–31,2000.
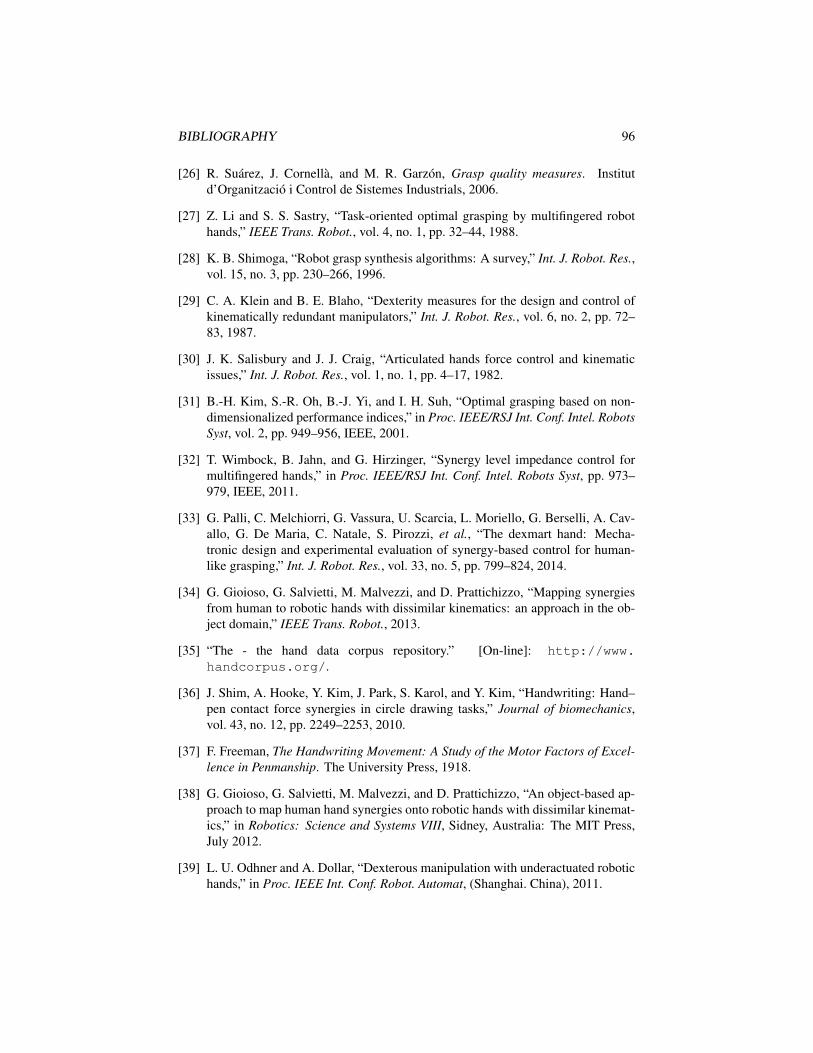
BIBLIOGRAPHY 96
[26] R. Suarez, J. Cornella, and M. R. Garzon, Grasp quality measures. Institutd’Organitzacio i Control de Sistemes Industrials, 2006.
[27] Z. Li and S. S. Sastry, “Task-oriented optimal grasping by multifingered robothands,” IEEE Trans. Robot., vol. 4, no. 1, pp. 32–44, 1988.
[28] K. B. Shimoga, “Robot grasp synthesis algorithms: A survey,” Int. J. Robot. Res.,vol. 15, no. 3, pp. 230–266, 1996.
[29] C. A. Klein and B. E. Blaho, “Dexterity measures for the design and control ofkinematically redundant manipulators,” Int. J. Robot. Res., vol. 6, no. 2, pp. 72–83, 1987.
[30] J. K. Salisbury and J. J. Craig, “Articulated hands force control and kinematicissues,” Int. J. Robot. Res., vol. 1, no. 1, pp. 4–17, 1982.
[31] B.-H. Kim, S.-R. Oh, B.-J. Yi, and I. H. Suh, “Optimal grasping based on non-dimensionalized performance indices,” in Proc. IEEE/RSJ Int. Conf. Intel. RobotsSyst, vol. 2, pp. 949–956, IEEE, 2001.
[32] T. Wimbock, B. Jahn, and G. Hirzinger, “Synergy level impedance control formultifingered hands,” in Proc. IEEE/RSJ Int. Conf. Intel. Robots Syst, pp. 973–979, IEEE, 2011.
[33] G. Palli, C. Melchiorri, G. Vassura, U. Scarcia, L. Moriello, G. Berselli, A. Cav-allo, G. De Maria, C. Natale, S. Pirozzi, et al., “The dexmart hand: Mecha-tronic design and experimental evaluation of synergy-based control for human-like grasping,” Int. J. Robot. Res., vol. 33, no. 5, pp. 799–824, 2014.
[34] G. Gioioso, G. Salvietti, M. Malvezzi, and D. Prattichizzo, “Mapping synergiesfrom human to robotic hands with dissimilar kinematics: an approach in the ob-ject domain,” IEEE Trans. Robot., 2013.
[35] “The - the hand data corpus repository.” [On-line]: http://www.handcorpus.org/.
[36] J. Shim, A. Hooke, Y. Kim, J. Park, S. Karol, and Y. Kim, “Handwriting: Hand–pen contact force synergies in circle drawing tasks,” Journal of biomechanics,vol. 43, no. 12, pp. 2249–2253, 2010.
[37] F. Freeman, The Handwriting Movement: A Study of the Motor Factors of Excel-lence in Penmanship. The University Press, 1918.
[38] G. Gioioso, G. Salvietti, M. Malvezzi, and D. Prattichizzo, “An object-based ap-proach to map human hand synergies onto robotic hands with dissimilar kinemat-ics,” in Robotics: Science and Systems VIII, Sidney, Australia: The MIT Press,July 2012.
[39] L. U. Odhner and A. Dollar, “Dexterous manipulation with underactuated robotichands,” in Proc. IEEE Int. Conf. Robot. Automat, (Shanghai. China), 2011.
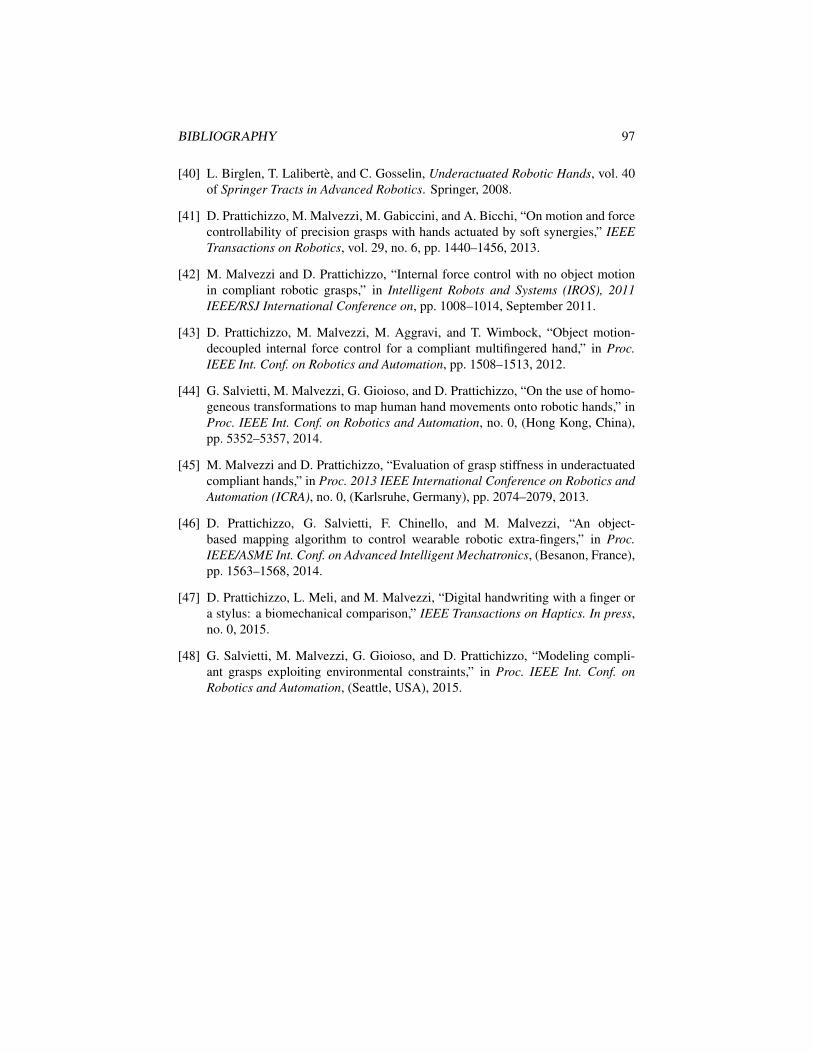
BIBLIOGRAPHY 97
[40] L. Birglen, T. Laliberte, and C. Gosselin, Underactuated Robotic Hands, vol. 40of Springer Tracts in Advanced Robotics. Springer, 2008.
[41] D. Prattichizzo, M. Malvezzi, M. Gabiccini, and A. Bicchi, “On motion and forcecontrollability of precision grasps with hands actuated by soft synergies,” IEEETransactions on Robotics, vol. 29, no. 6, pp. 1440–1456, 2013.
[42] M. Malvezzi and D. Prattichizzo, “Internal force control with no object motionin compliant robotic grasps,” in Intelligent Robots and Systems (IROS), 2011IEEE/RSJ International Conference on, pp. 1008–1014, September 2011.
[43] D. Prattichizzo, M. Malvezzi, M. Aggravi, and T. Wimbock, “Object motion-decoupled internal force control for a compliant multifingered hand,” in Proc.IEEE Int. Conf. on Robotics and Automation, pp. 1508–1513, 2012.
[44] G. Salvietti, M. Malvezzi, G. Gioioso, and D. Prattichizzo, “On the use of homo-geneous transformations to map human hand movements onto robotic hands,” inProc. IEEE Int. Conf. on Robotics and Automation, no. 0, (Hong Kong, China),pp. 5352–5357, 2014.
[45] M. Malvezzi and D. Prattichizzo, “Evaluation of grasp stiffness in underactuatedcompliant hands,” in Proc. 2013 IEEE International Conference on Robotics andAutomation (ICRA), no. 0, (Karlsruhe, Germany), pp. 2074–2079, 2013.
[46] D. Prattichizzo, G. Salvietti, F. Chinello, and M. Malvezzi, “An object-based mapping algorithm to control wearable robotic extra-fingers,” in Proc.IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, (Besanon, France),pp. 1563–1568, 2014.
[47] D. Prattichizzo, L. Meli, and M. Malvezzi, “Digital handwriting with a finger ora stylus: a biomechanical comparison,” IEEE Transactions on Haptics. In press,no. 0, 2015.
[48] G. Salvietti, M. Malvezzi, G. Gioioso, and D. Prattichizzo, “Modeling compli-ant grasps exploiting environmental constraints,” in Proc. IEEE Int. Conf. onRobotics and Automation, (Seattle, USA), 2015.















