
Strumenti per il tracciamento di posizione e stato di ... · di IREALP e SLALA quella relativa alla...
16
Strumenti per il tracciamento di posizione e stato di carico di mezzi pesanti. AlpCheck e il caso pilota del Nord Ovest.
Transcript of Strumenti per il tracciamento di posizione e stato di ... · di IREALP e SLALA quella relativa alla...
Strumenti per il tracciamentodi posizione e stato di caricodi mezzi pesanti.AlpCheck e il caso pilotadel Nord Ovest.

2

3
Progetto AlpCheck
In Europa molti soggetti si occupano di raccogliere dati di traffico, utilizzando sistemi differenti spesso non soltanto dal punto di vista tecnologico ma anche dal punto di vista del modello di classificazione; il risultato è che il più delle volte l’interpretazione delle reali condizioni del traffico è affetta da grave incertezza e disomogeneità, aspetti che tendono ad influire negativamente sullo sviluppo di politiche efficaci ed efficienti in materia di traffico e trasporto, soprattutto nella prospettiva di creare un sistema di mobilità sostenibile.
AlpCheck è un progetto del Programma Spazio Alpino Interreg IIIB che coinvolge 13 Partner di 4 stati membri (Italia, Austria, Slovenia, Germania). A capo della Partnership, che comprende Istituzioni, Università e Aziende, è la Regione Veneto. Il progetto, con durata da luglio 2006 a giugno 2008, è finanziato con un budget totale di 4.607.900 euro, metà dei quali con fondi FESR (Fondo Europeo di Sviluppo Regionale).
L’idea centrale del progetto, davvero ambiziosa, è di raccogliere dati di traffico da fonti diverse e di unirli per ottenere un’immagine chiara e ‘coesiva’ dei problemi legati al traffico nell’area Alpina, creando un Sistema Informativo funzionale progettato per gestire dati di traffico provenienti dai sistemi di monitoraggio esistenti ma non solo, dal momento che il Sistema segue standard globali garantendo al contempo la flessibilità necessaria per adattarsi alle specifiche di ogni utente.
I dati di traffico vengono raccolti e condivisi con attenzione particolare a:necessità degli utenti reali e potenzialisistemi di controllo e monitoraggio esistenti e/o implementati da altri progettidefinizione di uno standard

4
Allo scopo di verificare la fattibilità della gestione di una così grande varietà di dati in un unico sistema, nell’ambito AlpCheck sono state condotte alcune sperimentazioni pilota su tecnologie innovative per il monitoraggio, che hanno quindi contribuito a ‘nutrire’ la base di dati aggiungendo nuove informazioni oltre a quelle fornite dalle fonti esistenti.L’informazione ottenuta è mirata a fornire elementi significativi per l’analisi di alcune dinamiche del trasporto, in particolare:
i flussi di traffico locali, turistici e di mercile conseguenze del traffico su aree critiche dal punto di vista ambientalel’importanza strategica di piattaforme per l’ottimizzazione intermodalel’evidenziazione dei ‘viaggi a vuoto’ nel sistema di mobilità globale per definire una soluzione di riallocazione dei flussi di merci.
Partner di Progetto
Per l’Italia:Regione Veneto (Capofila)Autorità Portuale di VeneziaCSST – Centro Studi sui Sistemi di TrasportoEURAC – Accademia Europea di BolzanoIREALP – Istituto di Ricerca per l’Ecologia e l’Economia applicata alle Aree AlpineRegione Autonoma Valle d´Aosta - Direzione Protezione Civile - Servizio Interventi Operativi – Ufficio MeteorologicoFondazione SLALA – Sistema Logistico del Nord Ovest d’Italia
Per l’Austria:Amministrazione del Governo Regionale della CarinziaThe Interdisciplinary Centre for Comparative Research in the Social Sciences – ICCRParadigma Management Consulting
Per la Slovenia:Omega ConsultUniversità di Maribor – Facoltà di Ingegneria
Per la Germania: TCI Röhling - Transport Consulting International

5
Progetti pilota
All’interno del sistema dedicato alla raccolta e condivisione di dati di traffico nel panorama Europeo, sono state sviluppate alcune azioni pilota con il duplice scopo di fornire al sistema informativo dati creati ad hoc e di testare tecnologie innovative destinate alla raccolta di informazioni relative al traffico su strada.
La Regione Autonoma della Valle d’Aosta ha operato nella prospettiva di sperimentare, in un progetto di infomobilità regionale dedicato in particolare alle attività a rischio, un sistema ottico di riconoscimento delle targhe arancio dei veicoli preposti al trasporto di merci pericolose, unitamente ad un sistema a radio frequenza testato in condizioni critiche allo scopo di memorizzare e trasmettere su un transponder un grande numero di informazioni relative alla merce trasportata.
In Germania e nel Nord Est dell’Italia è stata realizzata una sperimentazione combinata per il monitoraggio di mezzi pesanti, unendo un test sulla pesatura in movimento ed un sondaggio su origine/destinazione effettuato su veicoli pesanti presso il Terminal Marittima del Porto di Venezia, ad una attività di tracciamento e localizzazione di mezzi su strada con strumentazione GPS a basso costo.
Il tema del monitoraggio dei flussi turistici è stato al centro del progetto pilota condotto in Slovenia, effettuato grazie all’accesso a dati raccolti da contatori collegati a spire induttive installati presso due punti ‘nevralgici’ su strade nazionali del territorio Sloveno, al confine nord e sud rispettivamente con Austria e Croazia.
15 stazioni di conteggio con analoga tecnologia, con in aggiunta 2 punti di controllo basati su sistemi all’infrarosso, hanno fornito dati relativi al traffico pendolare sull’autostrada A2 nelle vicinanze della città di Vienna, grazie ad un accordo stipulato con l’ente autostrade austriaco Asfinag.
Il progetto pilota condotto dal Governo della Carinzia ha portato alla realizzazione di un bando per la creazione di un ‘catasto strade’ aggiornabile in tempo reale e in grado di raccogliere e fornire informazioni sulle condizioni delle infrastrutture, sulla segnaletica, sui cantieri e in generale sulle soluzioni di gestione del traffico e della sicurezza stradale.
Nel Nord Ovest dell’Italia IREALP e SLALA hanno condotto una sperimentazione per la localizzazione di veicoli destinati al trasporto merci mediante tecnologia GNSS, utilizzando strumenti di navigazione satellitare a bordo, ottenendo per alcuni veicoli test un sensibile miglioramento dell’informazione di posizione grazie all’utilizzo di una rete di stazioni GNSS permanenti, ed un dato sullo stato di carico degli stessi.

6
Azione pilota di Irealp in collaborazione con Slala
Tra le metodologie proposte dall’Application Form (AF) del progetto AlpCheck si è scelta per l’azione congiunta di IREALP e SLALA quella relativa alla connessione dello stato di carico dei mezzi pesanti e del dato di Origine / Destinazione con “l’introduzione di sistemi di monitoraggio dei flussi di traffico mediante l’utilizzo di dati GPS…con analisi Origine / Destinazione”.
L’azione pilota in oggetto, per la quale è stato sottoscritto tra i Partner un accordo di collaborazione, riguarda il monitoraggio del traffico pesante con origine nell’area Nord Ovest dell’Italia e direzione transfrontaliera. A tal fine vengono monitorati mediante l’installazione di un modulo GPS/GPRS installato a bordo di veicoli campione lo stato di carico/scarico dei veicoli e la posizione degli stessi. Nell’accordo di collaborazione con SLALA, IREALP ha proceduto all’installazione di 7 stazioni GNSS e alla realizzazione di un pacchetto software per le operazioni di post-elaborazione in grado di fornire una stima migliorata della posizione, utilizzando i dati delle stazioni permanenti e quelli provenienti dai dispositivi di bordo dei 6 veicoli test, identificati e strumentati da SLALA. Inoltre SLALA ha firmato accordi di collaborazione con alcune Compagnie di Trasporto al fine di ottenere, per un grande numero di veicoli già strumentati con dispositivi di navigazione ‘di fascia bassa’, i soli dati di posizione senza correzione differenziale.
La rete di stazioni permanenti installata sul territorio del Piemonte (e zone limitrofe) è un sistema in grado di lavorare sia con la costellazione americana (GPS), con quella russa (GLONASS) e con la nascente costellazione Europea (Galileo) e predisposta all’utilizzo di eventuali altre costellazioni che si renderanno disponibili nel tempo. In questo modo è assicurata la contemporanea visibilità di un congruo numero di satelliti anche nel caso di ricezione limitata da ostacoli fisici.
Ogni singola installazione è costituita da un’antenna tipo choke ring con copertura sferica installata alla sommità dell’edificio ospitante e da un ricevitore in grado di restituire i dati provenienti dalle costellazioni GNSS attualmente attive 24 ore su 24 ed alloggiato in ambiente chiuso.
La strumentazione installata da SLALA sui 6 veicoli test è un localizzatore costituito da:un modulo GPS in grado di tracciare automaticamente la posizione del veicolodue tasti la cui pressione fornisce informazioni riguardo alle operazioni di carico e scarico un modulo GPRS per la spedizione dei dati ad un centro di controllo
Ciò che differenzia tale dispositivo da un sistema di localizzazione a bordo di tipo commerciale è la possibilità, grazie ad una modifica effettuata sul firmware del chip GPS (Sirf Star III), di registrare l’informazione relativa alle osservabili del satellite necessaria a realizzare l’operazione di correzione differenziale.
7
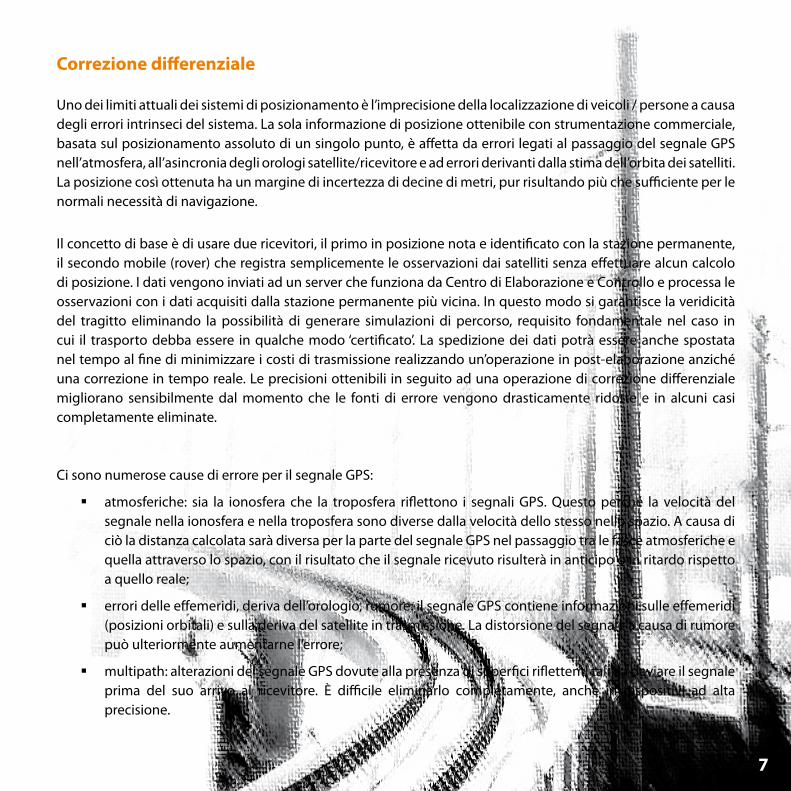
Correzione differenziale
Uno dei limiti attuali dei sistemi di posizionamento è l’imprecisione della localizzazione di veicoli / persone a causa degli errori intrinseci del sistema. La sola informazione di posizione ottenibile con strumentazione commerciale, basata sul posizionamento assoluto di un singolo punto, è affetta da errori legati al passaggio del segnale GPS nell’atmosfera, all’asincronia degli orologi satellite/ricevitore e ad errori derivanti dalla stima dell’orbita dei satelliti. La posizione così ottenuta ha un margine di incertezza di decine di metri, pur risultando più che sufficiente per le normali necessità di navigazione.
Il concetto di base è di usare due ricevitori, il primo in posizione nota e identificato con la stazione permanente, il secondo mobile (rover) che registra semplicemente le osservazioni dai satelliti senza effettuare alcun calcolo di posizione. I dati vengono inviati ad un server che funziona da Centro di Elaborazione e Controllo e processa le osservazioni con i dati acquisiti dalla stazione permanente più vicina. In questo modo si garantisce la veridicità del tragitto eliminando la possibilità di generare simulazioni di percorso, requisito fondamentale nel caso in cui il trasporto debba essere in qualche modo ‘certificato’. La spedizione dei dati potrà essere anche spostata nel tempo al fine di minimizzare i costi di trasmissione realizzando un’operazione in post-elaborazione anziché una correzione in tempo reale. Le precisioni ottenibili in seguito ad una operazione di correzione differenziale migliorano sensibilmente dal momento che le fonti di errore vengono drasticamente ridotte e in alcuni casi completamente eliminate.
Ci sono numerose cause di errore per il segnale GPS:
atmosferiche: sia la ionosfera che la troposfera riflettono i segnali GPS. Questo perché la velocità del segnale nella ionosfera e nella troposfera sono diverse dalla velocità dello stesso nello spazio. A causa di ciò la distanza calcolata sarà diversa per la parte del segnale GPS nel passaggio tra le fasce atmosferiche e quella attraverso lo spazio, con il risultato che il segnale ricevuto risulterà in anticipo o in ritardo rispetto a quello reale;
errori delle effemeridi, deriva dell’orologio, rumore: il segnale GPS contiene informazioni sulle effemeridi (posizioni orbitali) e sulla deriva del satellite in trasmissione. La distorsione del segnale a causa di rumore può ulteriormente aumentarne l’errore;
multipath: alterazioni del segnale GPS dovute alla presenza di superfici riflettenti tali da deviare il segnale prima del suo arrivo al ricevitore. È difficile eliminarlo completamente, anche in dispositivi ad alta precisione.

8
Di seguito alla correzione differenziale, gli errori sopra descritti si modificano in questo modo:
Fonte Senza correzione Con correzione
Ionosfera 0-30 mt Parzialmente eliminato
Troposfera 0-30 mt Parzialmente eliminato
Disturbo 0-10 mt Completamente eliminato
Efemeridi 1-5 mt Completamente eliminato
Errore di orologio 0-1.5 mt Completamente eliminato
Multipath 0-1 mt Non eliminato
Rete di stazioni permanenti
La scelta dei siti per le installazioni è stata condotta in maniera tale da garantire una copertura geografica omogenea della zona interessata dal progetto.Sono stati osservati i requisiti fondamentali di stabilità e visibilità che impongono una materializzazione solida e di precisione in un ambiente libero da strutture che possano ostacolare la visibilità del cielo, in modo tale da avere una visibilità completa sopra i 10°/15° sull’orizzonte.
Sono stati esclusi:siti con grande presenza di vegetazione per evitare fenomeni di schermo e di interferenza del segnale;siti con superfici riflettenti onde evitare fenomeni di riflessioni multiple del segnale incidente;siti che presentano nelle vicinanze fonti di radiazione elettromagnetica.
Inoltre i siti sono stati scelti in base a requisiti di accessibilità e alla necessità di eventuali autorizzazioni e alla disponibilità di collegamento alla rete dati ed elettrica, necessarie per il controllo da remoto e trasferimento dei dati e per il funzionamento della strumentazione stessa.
Per ogni sito è stato eseguito un progetto particolareggiato. Le fasi operative successive all’avvenuta rispondenza dell’immobile ai requisiti sopra elencati si riassumono come segue:
posa monumento con installazione del caposaldo geodetico;messa in bolla del supporto antenn a eseguita da ditta specializzata;installazione e orientamento dell’antenna;posa del cavo antenna e collegamento al ricevitore GPS;

9
predisposizione della linea dati con installazione di router;collegamento del ricevitore alla linea elettrica e alla rete dati;configurazione del ricevitore per l’acquisizione e per il controllo da remoto;collaudo finale con prove di collegamento da remoto e controllo di qualità dei dati acquisiti.
Ogni stazione permanente è composta da:
un’antenna con copertura sferica, fissata alla copertura dell’edificio ospitante mediante una monumenta-•zione in acciaio inox con due tipologie di fissaggio (piastra di fissaggio orizzontale o verticale) a seconda dei requisiti della struttura e introduzione di 4 tasselli successivamente siliconati;
un ricevitore installato in un ambiente interno e protetto;•
connessioni tra ricevitore e antenna realizzate con cavi a bassa attenuazione del segnale garantiti da •standard internazionali e realizzati su misura al fine di contenere al minimo la dispersione del segnale.
Sono state installate 7 stazioni permanenti GNNS nei seguenti siti, in modo da coprire parte del territorio regionale Piemontese, previa stipula di altrettante convenzioni tra IREALP e i gestori degli edifici ospitanti. Ogni installazione è stata corredata, in posizione visibile nell’edificio, di una targa, riportante alcune informazioni sull’iniziativa permessa dalla partecipazione della Unione Europea.
Regione Autonoma Valle d’Aosta
Région Autonome Vallée d’Aoste
Autorità Portuale di Venezia

10
Sito Nome Edificio DataInstallazione Stato
Domodossola DOMO Istituto Tecnico Industriale G. Marconi 12/12/2007 Operativa
Lenta LENT Azienda Tecnopiemonte 13/12/2007 Operativa
Mondovi MONI IstitutoTecnicoBaruffi 12/02/2008 Operativa
NizzaMonferrato NMON IstitutoTecnicoCommercialeeperGeometriN.Pellati 13/02/2008 Operativa
SerravalleScrivia SESC MagazzinodellaSocietàSerravalleServizi 14/03/2008 Operativa
Mede MELO Edificiodiproprietàcomunale 12/03/2008 Operativa
SantoStefanoRoero ROER EdificiosededelComune 13/03/2008 Operativa
S. Stefano Roero
Mondovì
Nizza Monferrato Serravalle Scrivia
Mede
Lenta
Domodossola
11
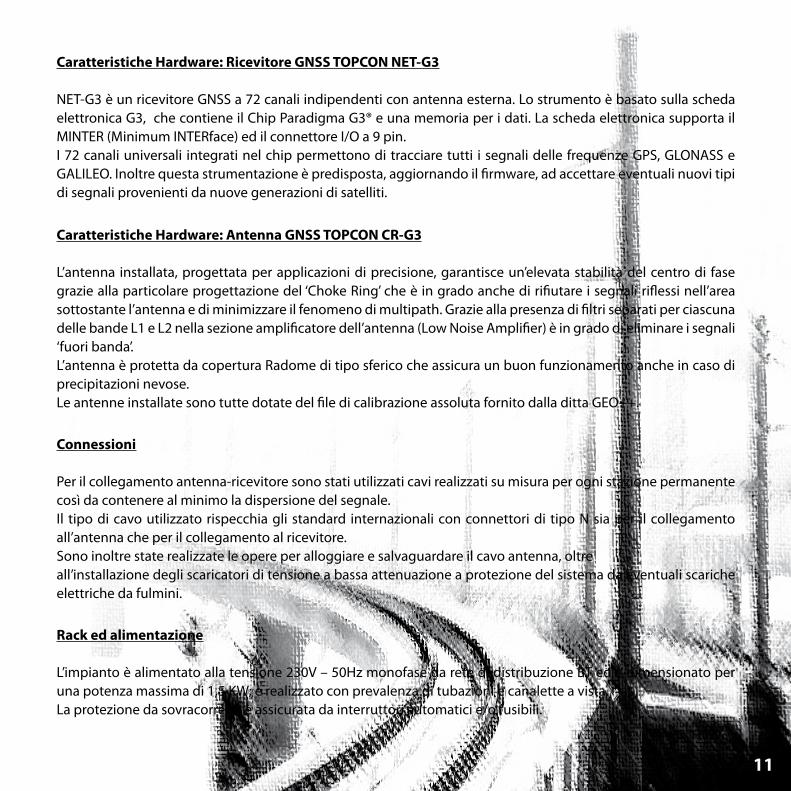
Caratteristiche Hardware: Ricevitore GNSS TOPCON NET-G3
NET-G3 è un ricevitore GNSS a 72 canali indipendenti con antenna esterna. Lo strumento è basato sulla scheda elettronica G3, che contiene il Chip Paradigma G3® e una memoria per i dati. La scheda elettronica supporta il MINTER (Minimum INTERface) ed il connettore I/O a 9 pin. I 72 canali universali integrati nel chip permettono di tracciare tutti i segnali delle frequenze GPS, GLONASS e GALILEO. Inoltre questa strumentazione è predisposta, aggiornando il firmware, ad accettare eventuali nuovi tipi di segnali provenienti da nuove generazioni di satelliti.
Caratteristiche Hardware: Antenna GNSS TOPCON CR-G3
L’antenna installata, progettata per applicazioni di precisione, garantisce un’elevata stabilità del centro di fase grazie alla particolare progettazione del ‘Choke Ring’ che è in grado anche di rifiutare i segnali riflessi nell’area sottostante l’antenna e di minimizzare il fenomeno di multipath. Grazie alla presenza di filtri separati per ciascuna delle bande L1 e L2 nella sezione amplificatore dell’antenna (Low Noise Amplifier) è in grado di eliminare i segnali ‘fuori banda’.L’antenna è protetta da copertura Radome di tipo sferico che assicura un buon funzionamento anche in caso di precipitazioni nevose. Le antenne installate sono tutte dotate del file di calibrazione assoluta fornito dalla ditta GEO++.
Connessioni
Per il collegamento antenna-ricevitore sono stati utilizzati cavi realizzati su misura per ogni stazione permanente così da contenere al minimo la dispersione del segnale.Il tipo di cavo utilizzato rispecchia gli standard internazionali con connettori di tipo N sia per il collegamento all’antenna che per il collegamento al ricevitore.Sono inoltre state realizzate le opere per alloggiare e salvaguardare il cavo antenna, oltreall’installazione degli scaricatori di tensione a bassa attenuazione a protezione del sistema da eventuali scariche elettriche da fulmini.
Rack ed alimentazione
L’impianto è alimentato alla tensione 230V – 50Hz monofase da rete di distribuzione BT ed è dimensionato per una potenza massima di 1,5 KW; è realizzato con prevalenza di tubazioni e canalette a vista. La protezione da sovracorrenti è assicurata da interruttori automatici e/o fusibili.
12
Il potere di corto circuito del dispositivo posto nel punto di consegna energia è pari a 4,5 kA.La protezione contro i contatti indiretti è stata attuata mediante interruzione automatica dell’alimentazione con i dispositivi di massima corrente e messa terra delle masse.L’armadio Rack, di dimensioni 600x600x800, è in acciaio verniciato a fuoco con resine epossidiche e dotato di portello con vetro per ispezione a vista. Inoltre è presente un gruppo di alimentazione in grado di assicurare un’autonomia di almeno 72 ore in caso di black-out della rete elettrica.
Tutti gli apparati hardware forniti sono corredati da apposita certificazione come previsto dalla normativa vigente.
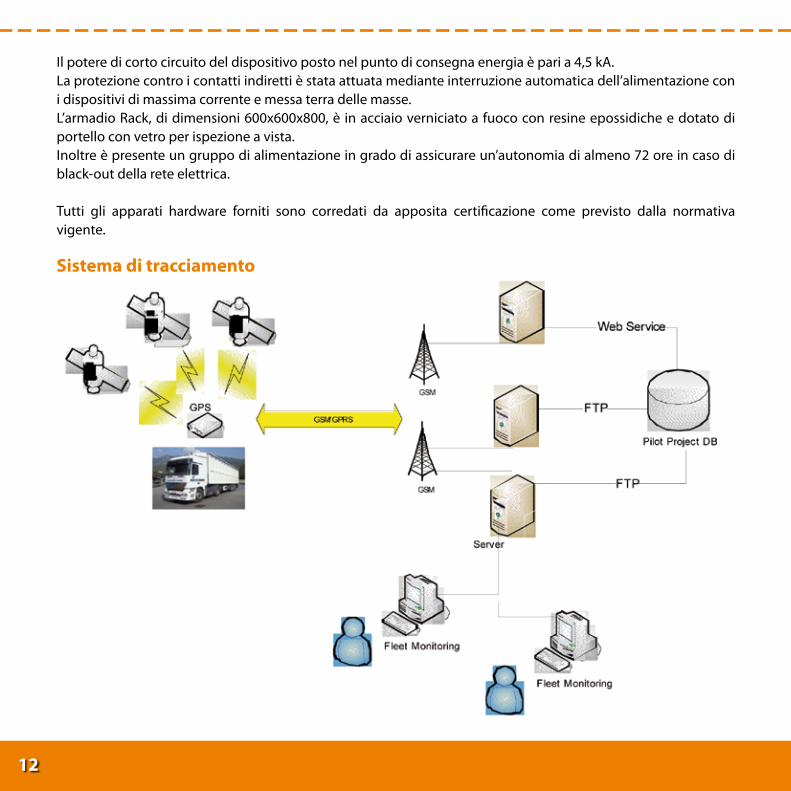
Sistema di tracciamento
13
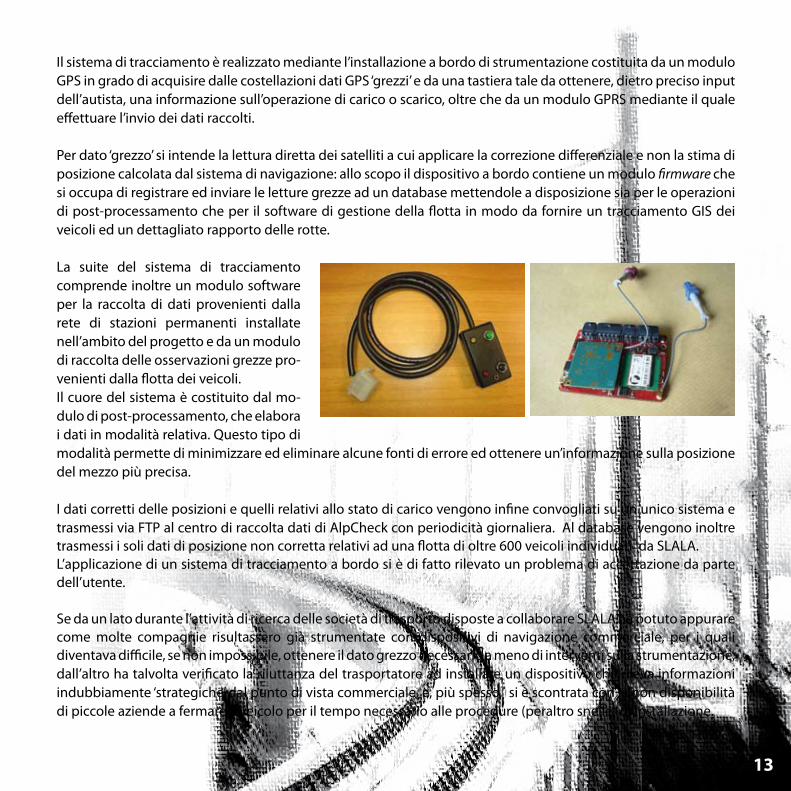
Il sistema di tracciamento è realizzato mediante l’installazione a bordo di strumentazione costituita da un modulo GPS in grado di acquisire dalle costellazioni dati GPS ‘grezzi’ e da una tastiera tale da ottenere, dietro preciso input dell’autista, una informazione sull’operazione di carico o scarico, oltre che da un modulo GPRS mediante il quale effettuare l’invio dei dati raccolti.
Per dato ‘grezzo’ si intende la lettura diretta dei satelliti a cui applicare la correzione differenziale e non la stima di posizione calcolata dal sistema di navigazione: allo scopo il dispositivo a bordo contiene un modulo firmware che si occupa di registrare ed inviare le letture grezze ad un database mettendole a disposizione sia per le operazioni di post-processamento che per il software di gestione della flotta in modo da fornire un tracciamento GIS dei veicoli ed un dettagliato rapporto delle rotte.
La suite del sistema di tracciamento comprende inoltre un modulo software per la raccolta di dati provenienti dalla rete di stazioni permanenti installate nell’ambito del progetto e da un modulo di raccolta delle osservazioni grezze pro-venienti dalla flotta dei veicoli.Il cuore del sistema è costituito dal mo-dulo di post-processamento, che elabora i dati in modalità relativa. Questo tipo di modalità permette di minimizzare ed eliminare alcune fonti di errore ed ottenere un’informazione sulla posizione del mezzo più precisa.
I dati corretti delle posizioni e quelli relativi allo stato di carico vengono infine convogliati su un unico sistema e trasmessi via FTP al centro di raccolta dati di AlpCheck con periodicità giornaliera. Al database vengono inoltre trasmessi i soli dati di posizione non corretta relativi ad una flotta di oltre 600 veicoli individuati da SLALA.L’applicazione di un sistema di tracciamento a bordo si è di fatto rilevato un problema di accettazione da parte dell’utente.
Se da un lato durante l’attività di ricerca delle società di trasporto disposte a collaborare SLALA ha potuto appurare come molte compagnie risultassero già strumentate con dispositivi di navigazione commerciale, per i quali diventava difficile, se non impossibile, ottenere il dato grezzo necessario a meno di interventi sulla strumentazione, dall’altro ha talvolta verificato la riluttanza del trasportatore ad installare un dispositivo che rileva informazioni indubbiamente ‘strategiche’ dal punto di vista commerciale, e, più spesso, si è scontrata con la non disponibilità di piccole aziende a fermare il veicolo per il tempo necessario alle procedure (peraltro snelle) di installazione.

14
Prospettive e opportunità
L’attività di controllo dello stato di carico ottenuta attraverso la pressione di tasti sul dispositivo all’atto delle operazioni di carico e scarico è certamente affetta da grave incertezza dovuta al fatto che la correttezza del dato è fondamentalmente legata alla volontà dell’utente di fornire l’informazione, e di fornirla in modo veritiero e puntuale.L’installazione, in aggiunta alla strumentazione GPS, di un set di sensori che possano automatizzare tale informazione è sicuramente una strada da percorrere per garantire un controllo reale e preciso dello stato di carico, procedendo nella direzione di uno degli obiettivi che il progetto AlpCheck si prefigge, ovvero quello dell’individuazione dei ‘viaggi a vuoto’ (secondo attuali statistiche il 40% dei veicoli pesanti viaggia senza merce a bordo) con la conseguente apertura verso un sistema di ottimizzazione delle tratte. Le banche dei trasporti costituiscono attualmente una possibile e interessante soluzione, ma non l’unica soluzione.
Mediante sensori all’infrarosso è possibile stimare per esempio l’avvenuto spostamento di colli all’interno di un container; l’apertura o la chiusura delle porte del veicolo potrebbe essere controllata mediante l’applicazione di sensori elettromagnetici, così come da sensori di variazione della luce; l’utilizzo di sensori ad ultrasuoni permette inoltre di verificare, con alta precisione, la disponibilità di spazio all’interno dei container ai fini di ottenere l’ottimizzazione nell’utilizzo dello spazio. La sola aggiunta di un accelerometro permette di comunicare l’informazione dell’avvenuto avvio del veicolo, con le ovvie conseguenze positive in direzione dell’automatizzazione nella gestione del parco veicoli di una flotta numerosa. Tutte queste informazioni, ottenute dall’attività dei sensori, possono essere raccolte ed inviate, mediante un modulo senza fili basato su tecnologia ZigBee, al dispositivo installato in cabina e da qui trasmesse, mediante pacchetto GPRS, insieme con i dati di posizione agli appositi server.
La combinazione di uno strumento di tracciamento e localizzazione GPS con buona precisione delle rotte dei veicoli e di sistemi di controllo automatizzato dello stato di carico, oltre a fornire alla società di trasporto un efficiente sistema per la gestione della flotta e del magazzino, risulta pertanto di grande interesse dal punto di vista logistico e in tutte le applicazioni dove sia indispensabile la garanzia di veridicità del percorso e la certezza della destinazione della merce trasportata. L’utilizzo infatti di un sistema di controllo basato sulla correzione differenziale elimina la possibilità di generare simulazioni di percorso assicurando in real-time che il veicolo si stia attenendo al percorso assegnato e stia provvedendo ad effettuare le operazioni di carico e scarico nei siti previsti dal programma. L’eventuale predisposizione nel centro di controllo di un sistema di allarmi in corrispondenza di variazioni di percorso o operazioni di scarico non autorizzate completa il quadro fornendo un sistema efficace e di estrema utilità per gli organismi di controllo preposti al monitoraggio del trasporto di materiali con particolari caratteristiche di pericolosità (rifiuti, sostanze pericolose).

15
Contributi di:
Alessandra Gelmini, Francesco Matonti, Marco ScurattiIREALP – Istituto di Ricerca per l’Ecologia e l’Economia Applicate alle Aree Alpine
Nicola Bassi, Fondazione SLALA – Sistema logistico del Nord Ovest d’Italia
Ivan Allevi, Allix srl
Hanno collaborato inoltre:
Carlo Caffi, Luca Grimaldi, Mariagrazia PedranaIREALP – Istituto di Ricerca per l’Ecologia e l’Economia Applicate alle Aree Alpine
Si ringraziano per la collaborazione nell’installazione della rete di stazioni permanenti:
Istituto Tecnico Industriale “Guglielmo Marconi” – Domodossola (VB)
Istituto Tecnico “Giuseppe Baruffi” – Mondovì (CN)
Istituto Tecnico Commerciale e per Geometri “Nicola Pellati” – Nizza Monferrato (AT)
Società Tecnopiemonte SPA – Lenta (VC)
Società Serravalle Servizi SPA – Serravalle Scrivia (AL)
Comune di Mede (PV)
Comune di Santo Stefano Roero (CN)



















