Stress and Strain in Solids - WordPress.com · 2017. 9. 7. · Vincent Casey Solid State Physics:...
34
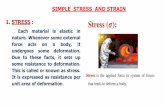
Stress and Strain in Solids A solid is stressed by applying external forces such that both the net force and the net torque are zero, i.e. static equilibrium. Figure 1: (a) Zero net force and (b) zero net torque, applied to a cubic volume element of face area A. The first suffix indicates the direction in which the stress (force) acts and the second suffix indicates the direction of the normal to the face upon which the stress acts. Zero Net Force achieved by exerting forces equal in magnitude, but in opposite directions, perpendicularly to opposite faces, tending to Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 1 / 34
Transcript of Stress and Strain in Solids - WordPress.com · 2017. 9. 7. · Vincent Casey Solid State Physics:...
-
Stress and Strain in Solids
A solid is stressed by applying external forces such that both the net force andthe net torque are zero, i.e. static equilibrium.
Figure 1: (a) Zero net force and (b) zero net torque, applied to a cubic volume elementof face area A. The first suffix indicates the direction in which the stress (force) actsand the second suffix indicates the direction of the normal to the face upon which thestress acts.
Zero Net Force achieved by exerting forces equal in magnitude, but in oppositedirections, perpendicularly to opposite faces, tending tocompress/elongate the sample.
Zero Net Torque achieved by applying equal and opposite forces in a parallelfashion to opposite faces, tending to shear the sample
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 1 / 34
-
The Stress Tensor I
A force Fx applied in the x-direction to a plane with area Ax whose normal isalso in the x-direction produces a stress component:
σxx =FxAx
Likewise, the same force applied to a plane whose normal is in the y -directionproduces the stress component:
σxy =FxAy
Since stresses on opposite faces of the cube are equal and opposite we onlyneed to consider three faces. Thus, stress in general is described by asecond-rank tensor σ with nine components σij(i, j = x ,y ,z), convenientlywritten as a 3×3 array:
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 2 / 34
-
The Stress Tensor II
Figure 2: Representation of the ’three face stresses’.
σ =
σxx σxy σxzσyx σyy σyzσzx σzy σzz
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 3 / 34
-
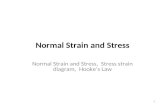
Special cases I
However, only six of these stress components are independent because of theconstraint of zero torque, which implies that:
σxy = σyx ;σyz = σzy ;σzx = σxz
Figure 3: Uniform hydrostatic compressive stress and pure shear deformation (atconstant volume).
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 4 / 34
-
Special cases II
Special cases of stress have most of the six independent stress componentsequal to zero. For instance for uniaxial stress in the x-direction, the onlynon-zero component is σxx = σ.For hydrostatic stress, the non-zero components are the diagonalcomponents
σxx = σyy = σzz =−P
For pure shear, in which the shape but not the volume of the solid is changed,is represented by say
σxy = σyx = σ
being the only non-zero components.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 5 / 34
-
Diagonalization I
A particular orientation of the spatial coordinates can always be found suchthat the general stress matrix has diagonal components only, i.e.
σ′=
σx 0 00 σy 00 0 σz
the six independent variables defining the stress system now being the threeprincipal stresses σi(i = x ,y ,z) acting along the principle axes, and the threevariables needed to determine the orientation of the principle axes with respectto the original coordinate system.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 6 / 34
-
Matrix Transformation I
A general stress matrix, transformed to the principal axis system can always bewritten as
σx 0 00 σy 00 0 σz
= σ0 0 00 σ0 0
0 0 σ0
+ (σx −σ0) 0 00 (σy −σ0) 0
0 0 (σz−σ0)
where the new stress component is given by
σ0 = (σx + σy + σz)/3
The first term of the transformed stress matrix represents a purely hydrostaticterm, with
σ0 =−P = (σx + σy + σz)/3
which causes a change in volume (dilatoric), but not of shape, of an elasticallyisotropic solid.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 7 / 34
-
Matrix Transformation II
The second term of the transformed stress matrix represents a pure shear,causing a change of shape (deviatoric), but not of volume, of a solid, since thesum of the diagonal components equals zero, i.e. ∑x ,y ,z σii = 0
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 8 / 34
-
Non uniform deformation: Strains
The application of an external force to a solid causes a deformation becausedifferent points in the material are displaced by different amounts. Consider apoint P initially at r and a neighbouring point Q initially at r + u, displaced underthe action of stress to P
′at (r + ∆r) and Q
′at (r + ∆r + u + ∆u) respectively.
Figure 4: 2D representation of infinitesimal homogeneous elastic strain.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 9 / 34
-
Strain Components I
For small relative displacements (|∆u|
-
Strain Components II
being independent because of the requirement that the off-diagonalcomponents obey the condition eij = eji in order to exclude rigid rotations.Special cases of strain include uniaxial strain in the x-direction with only onenon-zero strain component being exx = e; uniform dilation or compression,resulting from hydrostatic stress, with eij = e (i = x ,y ,z); and pure shear witheij = eji = e (i = x , j = y) or other orthogonal pair.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 11 / 34
-
General Strain
As with a general stress, a general strain can be separated into a dilation-straincomponent (volume change) and a pure strain (deviatoric-strain) component(shape change). For a general strain component
eij =e03
δij + (eij −e03
δij)
where the Kronecker delta symbol has the properties:
δij = 1, i = jδij = 0, i 6= j
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 12 / 34
-
Notation simplification
Since there are only six independent stress and strain components, aconvenient short-hand notation is to relabel the component indices as follows:
xx → 1yy → 2zz→ 3yz→ 4zx → 5xy → 6
Hooke’s law states that the stress and strain are directly proportional to eachother. Thus, in terms of elastic-stiffness coefficients, Cij , a stress coefficientcan be written as a function of a strain as
σi =6
∑j=1
Cijej
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 13 / 34
-
Stress-strain coefficients
The relationship between stress and strain coefficients can also be written inmatrix form as
σ1σ2σ3σ4σ5σ6
=
C11 C12 C13 C14 C15 C16C21 C22 C23 C24 C25 C26C31 C32 C33 C34 C35 C36C41 C42 C43 C44 C45 C46C51 C52 C53 C54 C55 C56C61 C62 C63 C64 C65 C66
e1e2e3e4e5e6
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 14 / 34
-
Compliance - a useful alternative! I
Alternatively, a strain coefficient can be expressed in terms of theelastic-compliance coefficients, Sij , as a function of the stress:
ei =6
∑j=1
Sijσj
where both elastic compliance and stiffness are quantities describing amaterial as an elastic continuum.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 15 / 34
-
Compliance - a useful alternative! II
Figure 5: Stress Strain Matrix
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 16 / 34
-
Physical Meaning
Physical meaning of eij
e11 =∂ux∂x
e22 =∂uy∂y
e33 =∂uz∂z
Simple tensile strains along the x ,y ,z axes are positive for tension andnegative for compression. Deformation in the xy plane of a rectangular thin filmcorresponds to:
e12 6= 0;e21 6= 0
e11 = e22 = 0
e3i = ei3 = 0; i = x ,y ,zVincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 17 / 34
-
Pure Shear
Figure 6: Pure Shear
With angles greatly exaggerated, this corresponds to:
e12 ≈∂ux∂y
e21 ≈∂uy∂x
which equals the angles respectively.Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 18 / 34
-
Pure Rotation
Possible combinations of e12 and e21:
Pure Shear e12 = e21Pure Rotation e12 =−e21Simple Shear e12 6= 0;e21 = 0
Figure 7: A pure rotation.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 19 / 34
-
Figure 8: Simple Shear
Figure 9: Comparing pure strain and rotation.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 20 / 34
-
Generalization I
e =
0 γ/2 0γ/2 0 00 0 0
+ 0 γ/2 0−γ/2 0 0
0 0 0
eij = εij + ωij
εij = 1/2(eij + eji)
ωij = 1/2(eij −eji)
eij = eji - symmetric with respect to i and j : measures shape change!ωij =−ωji - antisymmetric with respect to i and j : measures rotation.ωij = 0(i = j)Therefore ωij has three independent elements implying that three independentrotations are possible, one about each axis.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 21 / 34
-
Simplification of the Matrix I
Of the 36 elastic stiffness (or compliance) coefficients in the most general caseof triclinic crystals, 21 are independent and non zero as a result of the generalcondition
Cij = Cji
The presence of higher symmetry reduces the number of coefficients further.For cubic crystals, just three components are independent, C11,C12 and C44with
C11 = C22 = C33,C12 = C13 = C23,C44 = C55 = C66,
and all other coefficients being zero.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 22 / 34
-
Matrix: Simple Cubic Crystal
C11 C12 C12 0 0 0C12 C11 C12 0 0 0C12 C12 C11 0 0 00 0 0 C44 0 00 0 0 0 C44 00 0 0 0 0 C44
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 23 / 34
-
Stiffness and Compliance Coefficients
These elastic stiffness constants are related to the corresponding elasticcompliance coefficients via the relationships
S11 =C11 + C12
(C11−C12)(C11 + 2C12)> 0,
S12 =−C12
(C11−C12)(C11 + 2C12)≤ 0,
S44 =1
C44as obtained from inversion of the stiffness matrix.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 24 / 34
-
Isotropic Solids
In the case of elastically isotropic solids (amorphous solids), the number ofindependent elastic coefficients decreases to two since, in addition to theequalities applicable to cubic materials, the coefficients are further linearlyrelated to each other by the equation
C11 = C12 + 2C44
Lamé Constants: For such isotropic materials, the two independent elasticstiffness coefficients are conventionally referred to as the Lamé constants:
λ≡ C12and
µ = C44with
C11 ≡ (λ + 2µ)Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 25 / 34
-
Uniaxial Stress: Isotropic Media I
Uniaxial Stress: For uniaxial stress,Young’s modulus is defined as
E =σxxexx
and so
E =1
S11=
(C11−C12)(C11 + 2C12)C11 + C12
= µ(3λ + 2µ)
(λ + µ)for the case of isotropic media. Under such stress loading, the sample alsodeforms in directions perpendicular to the stress direction. This behaviour isquantified by Poisson’s ratio, defined as
ν =|transverse strain|
normal strain=|eyy |exx
with
ν =−S12S11
=C12
(C11 + C12)=
λ2(λ + µ)
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 26 / 34
-
Uniaxial Stress: Isotropic Media II
where 0≤ ν≤ 0.5.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 27 / 34
-
Hydrostatic Stress
Hydrostatic Stress: In the case of hydrostatic stress (pressure), the bulkmodulus B (equal to the inverse of the compressibility, κ = 1B relates thepressure to the dilation (fractional change in volume) e0,
B =Pe0
with
B =1
3(S11 + 2S12)=
(C11 + 2C12)3
=(3λ + 2µ)
3
The bulk modulus is connected to microscopic quantities relating to theinteratomic potential.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 28 / 34
-
Pure Shear
Pure Shear: Finally, for the case of pure shear, the shear (or rigidity) modulusis defined as:
G =shear stressshear strain
=σxyexy
giving for isotropic solids
G =1
2(S11−S12)=
(C11−C12)2
≡ C44 = µ
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 29 / 34
-
Some Interrelationships
Some Interrelationships: The various elastic moduli are inter-related; forexample
G =E
2(1 + νand
B =E
3(1−2ν)
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 30 / 34
-
Deformation Modes of Cubic Crystals 1
(a) Dilation by hydrostatic stress.Hydrostatic: Under a hydrostatic pressure P:
σ1 = σ2 = σ3 =−P
σ4 = σ5 = σ6 =−0
and the dilation4= e1 + e2 + e3 is
4= e1 + e2 + e3without rotation. Using these relationships we can show that the bulk modulusB is given by:
B =−p4
=13
(C11 + 2C12)
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 31 / 34
-
Deformation Modes of Cubic Crystals 2
(b) Shear on a cube face parallel to a cube axis.
Figure 10: Two shear modes for a cubic crystal.
For example on the (010) plane in the [001] direction:
σ4 = C44e4C44 is a shear modulus, which by convention we name µ0.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 32 / 34
-
Deformation Modes of Cubic Crystals 2 I
(c) Shear at 45◦ to a cube axisFor example, on the (110) plane in the [11̄0] direction. In this case the shearmodulus is:
µ1 =12
(C11−C12)
This allows us define an anisotropy factor,
µ0µ1
=2C44
(C11−C12)which of course will be one for an isotropic material.In terms of the Lamé constants:
λ = C12;µ = C44;λ + 2µ = C11
which explains why cubic crystals are not in general isotropic.
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 33 / 34
-
Deformation Modes of Cubic Crystals 2 II
W Al Fe Cu Naµ0µ1
1.0 1.2 2.4 3.2 7.5Structure bcc fcc bcc fcc bcc
Vincent Casey Solid State Physics: Crystal Mechanics September 7, 2017 34 / 34
Stress and Strain TensorsPhysical MeaningSimplification of the 'Matrix'Deformation Modes of Cubic Crystals