
Spline Interpolation Method - USF College of...
21
2/21/2017 1 http://numericalmethods.eng.usf.edu 1 Spline Interpolation Method Major: All Engineering Majors Authors: Autar Kaw, Jai Paul http://numericalmethods.eng.usf.edu Transforming Numerical Methods Education for STEM Undergraduates Spline Method of Interpolation http://numericalmethods.eng.usf.edu
Transcript of Spline Interpolation Method - USF College of...

2/21/2017
1
http://numericalmethods.eng.usf.edu 1
Spline Interpolation Method
Major: All Engineering Majors
Authors: Autar Kaw, Jai Paul
http://numericalmethods.eng.usf.eduTransforming Numerical Methods Education for STEM
Undergraduates
Spline Method of Interpolation
http://numericalmethods.eng.usf.edu
2/21/2017
2
3
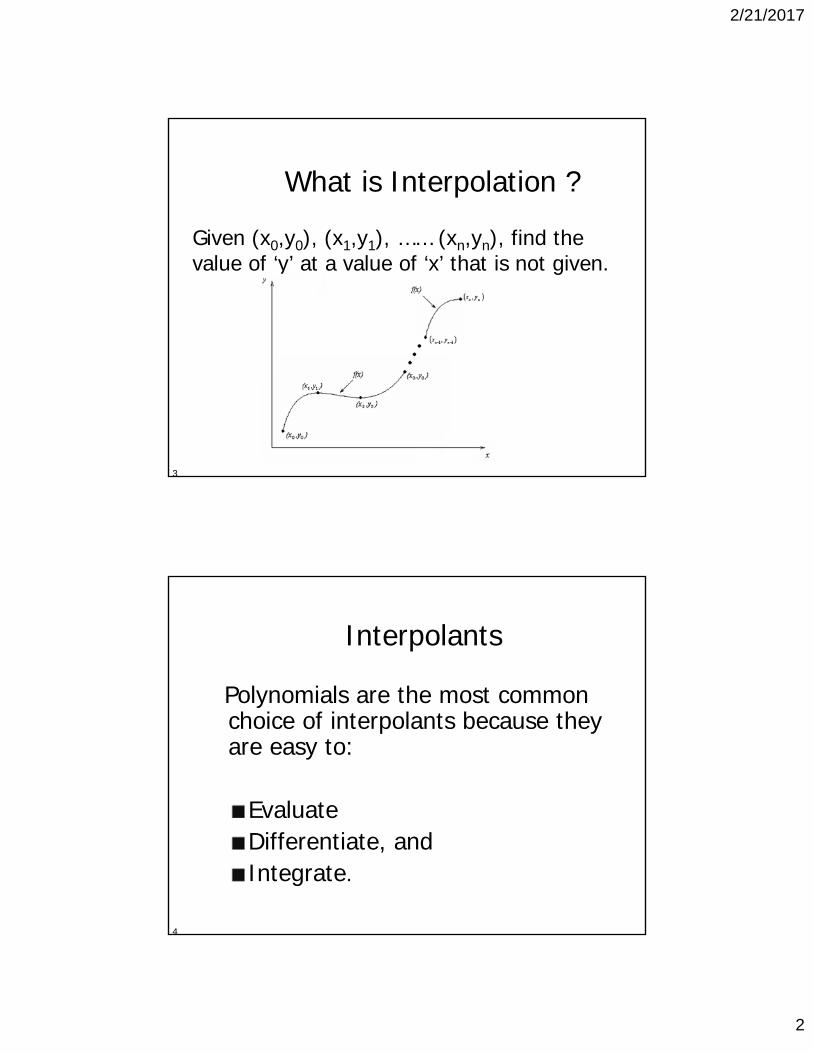
What is Interpolation ?
Given (x0,y0), (x1,y1), …… (xn,yn), find the value of ‘y’ at a value of ‘x’ that is not given.
4
Interpolants
Polynomials are the most common choice of interpolants because they are easy to:
EvaluateDifferentiate, and Integrate.

2/21/2017
3
5
Why Splines ?
6
Why Splines ?
Figure : Higher order polynomial interpolation is a bad idea
2/21/2017
4
7
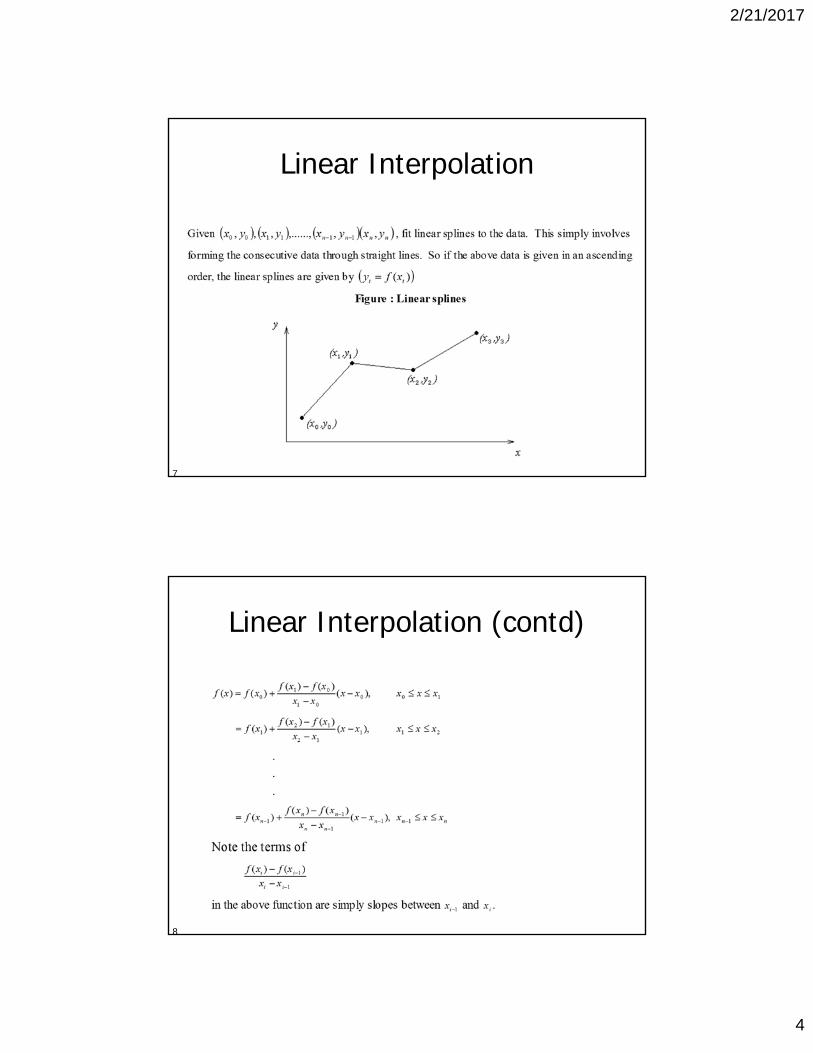
Linear Interpolation
8
Linear Interpolation (contd)

2/21/2017
5
9
Example
The upward velocity of a rocket is given as a function of time in Table 1. Find the velocity at t=16 seconds using linear splines.
Table Velocity as a function of time
Figure. Velocity vs. time data for the rocket example
(s) (m/s)0 010 227.0415 362.7820 517.35
22.5 602.9730 901.67
10
Linear Interpolation
2/21/2017
6
11
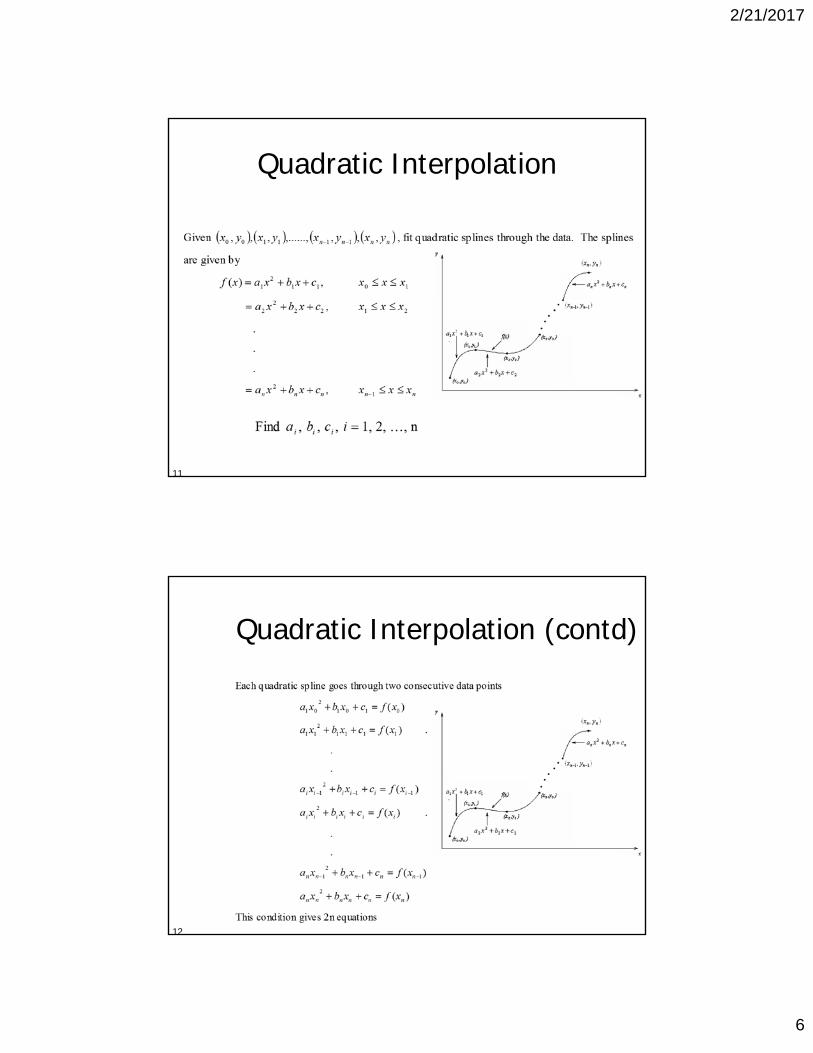
Quadratic Interpolation
12
Quadratic Interpolation (contd)
2/21/2017
7
13
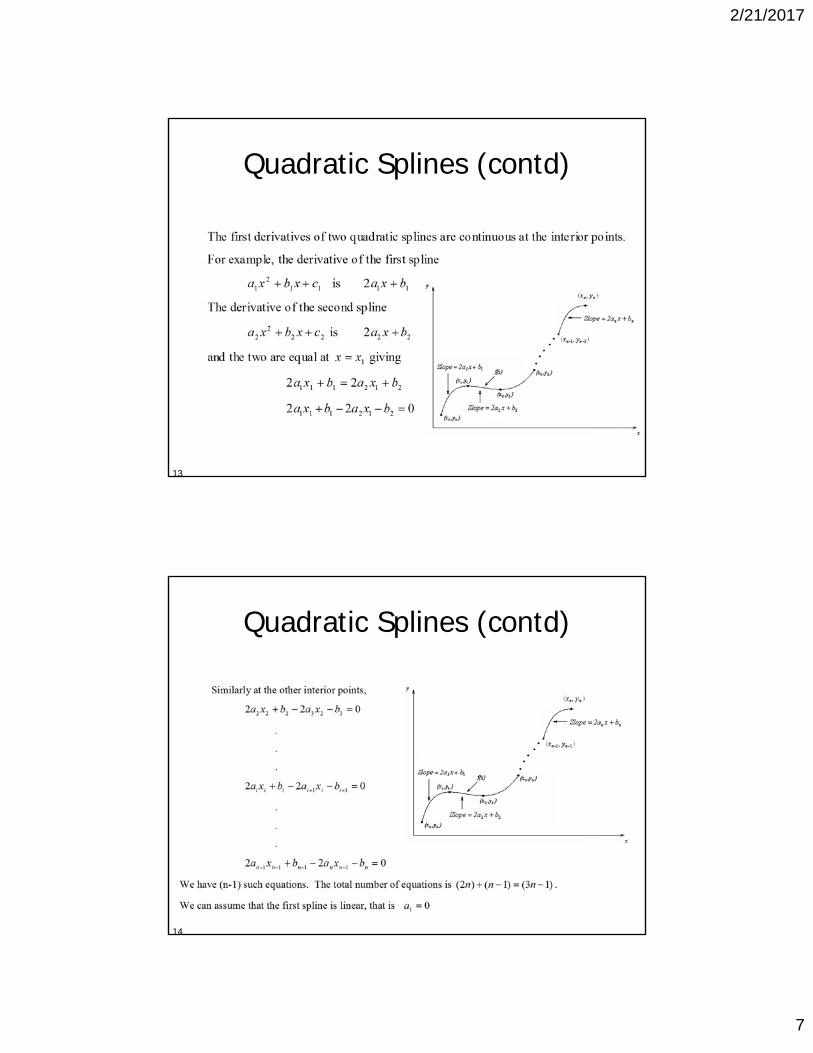
Quadratic Splines (contd)
14
Quadratic Splines (contd)

2/21/2017
8
15
Quadratic Splines (contd)
Quadratic Spline InterpolationPart 1 of 2
http://numericalmethods.eng.usf.edu
2/21/2017
9
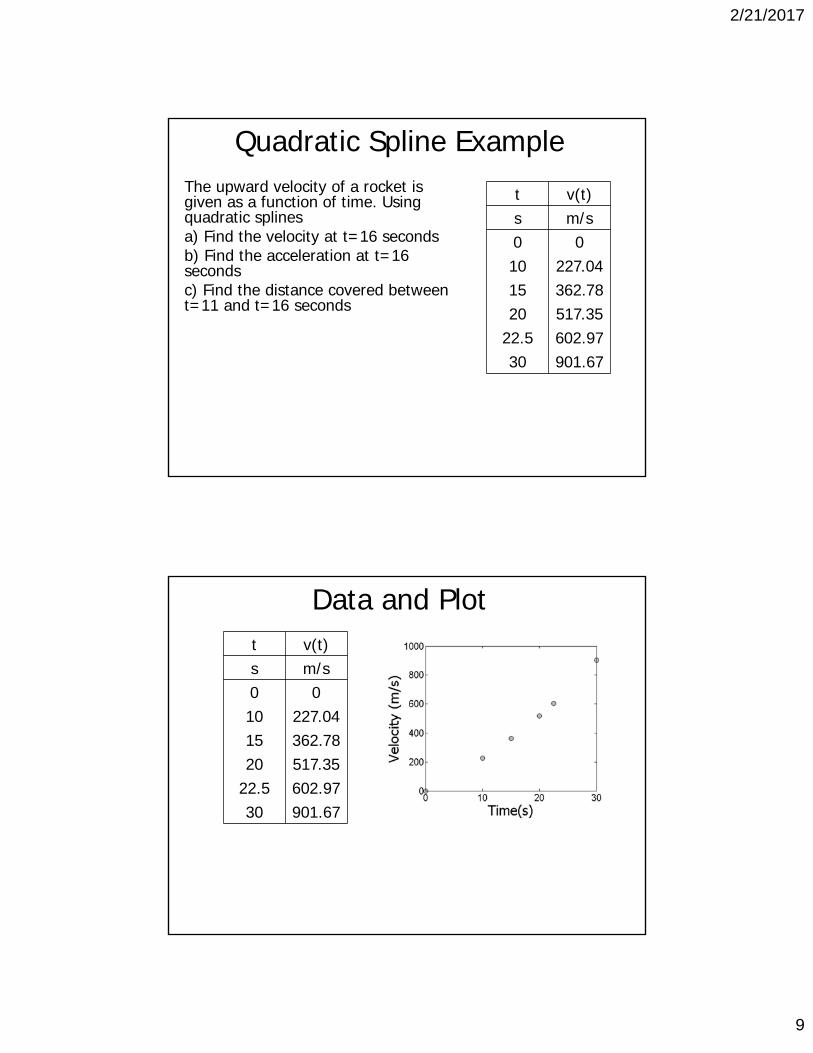
Quadratic Spline ExampleThe upward velocity of a rocket is given as a function of time. Using quadratic splinesa) Find the velocity at t=16 secondsb) Find the acceleration at t=16 secondsc) Find the distance covered between t=11 and t=16 seconds
t v(t)s m/s0 010 227.0415 362.7820 517.35
22.5 602.9730 901.67
Data and Plott v(t)s m/s0 010 227.0415 362.7820 517.35
22.5 602.9730 901.67

2/21/2017
10
Solution
Let us set up the equations
Each Spline Goes Through Two Consecutive Data Points

2/21/2017
11
t v(t)
s m/s
0 0
10 227.04
15 362.78
20 517.35
22.5 602.97
30 901.67
Each Spline Goes Through Two Consecutive Data Points
Derivatives are Continuous at Interior Data Points
2/21/2017
12
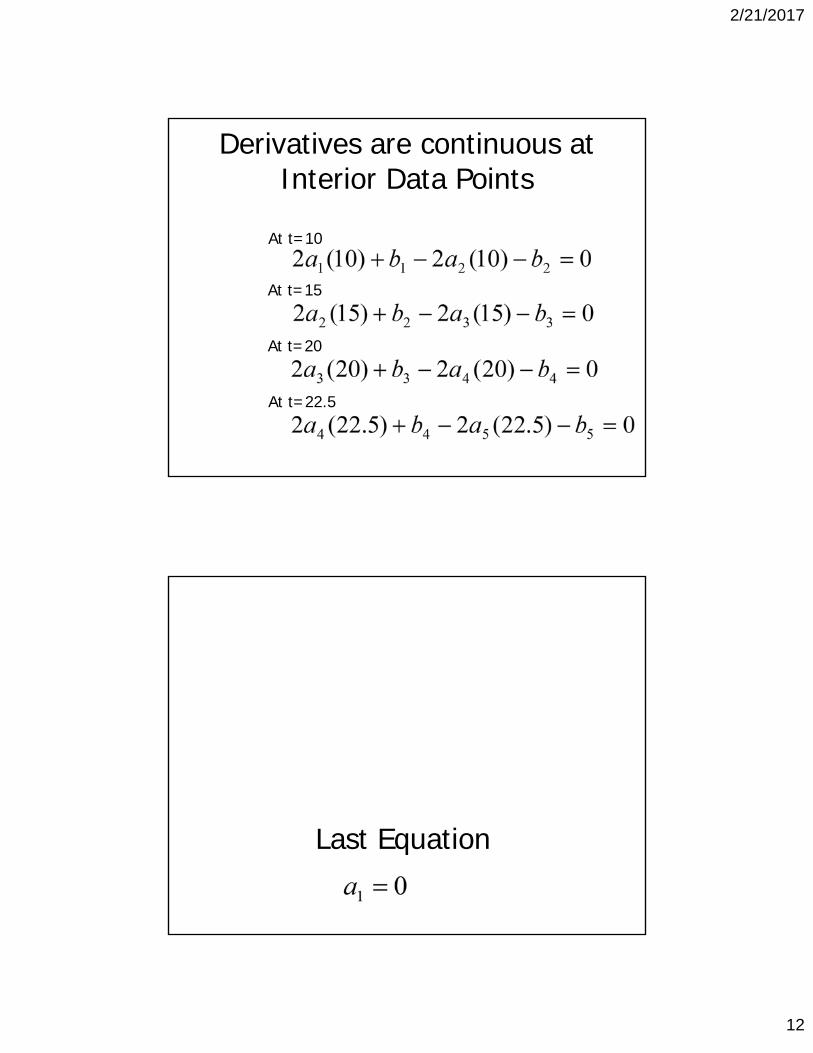
Derivatives are continuous at Interior Data Points
At t=10
At t=15
At t=20
At t=22.5
Last Equation

2/21/2017
13
Final Set of Equations
Coefficients of Spline
i ai bi ci
1 0 22.704 0
2 0.8888 4.928 88.88
3 -0.1356 35.66 -141.61
4 1.6048 -33.956 554.55
5 0.20889 28.86 -152.13

2/21/2017
14
END
http://numericalmethods.eng.usf.edu
Quadratic Spline InterpolationPart 2 of 2
http://numericalmethods.eng.usf.edu
2/21/2017
15
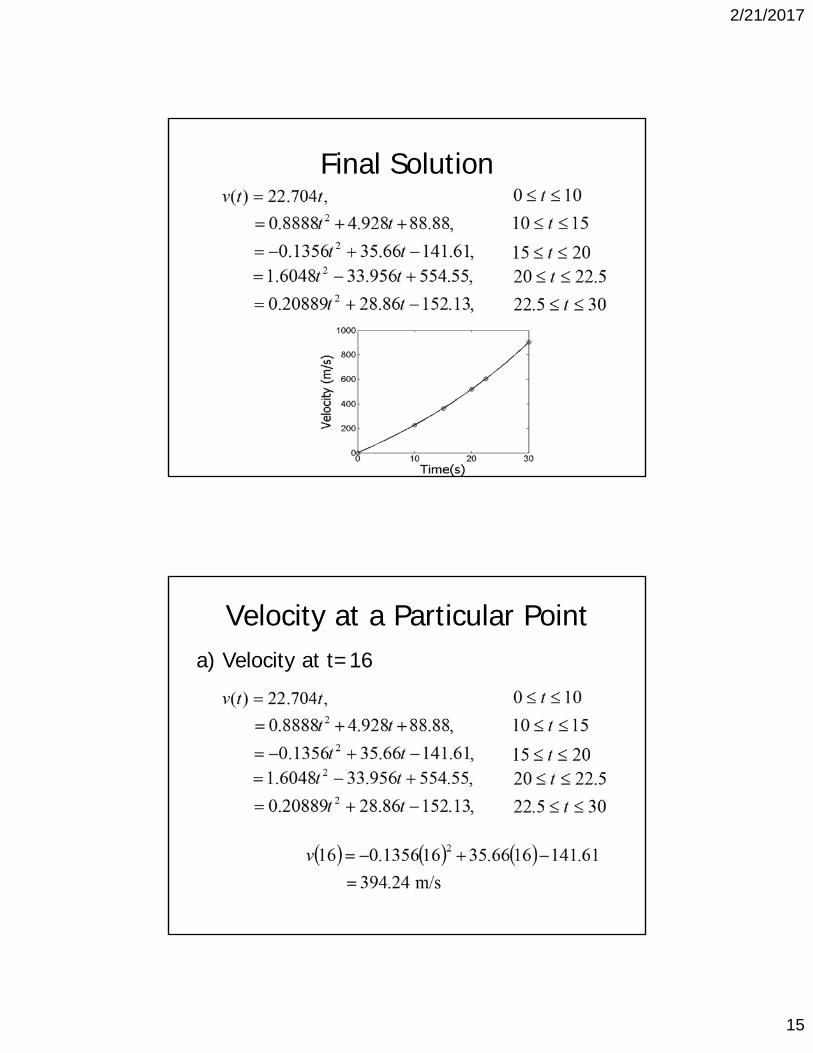
Final Solution
Velocity at a Particular Pointa) Velocity at t=16

2/21/2017
16
Acceleration from Velocity Profileb) Acceleration at t=16
Acceleration from Velocity Profile
The quadratic spline valid at t=16 is given by
,

2/21/2017
17
Distance from Velocity Profilec) Find the distance covered by the rocket from
t=11s to t=16s.
Distance from Velocity Profile
2/21/2017
18
Additional Resources
For all resources on this topic such as digital audiovisual lectures, primers, textbook chapters, multiple-choice tests, worksheets in MATLAB, MATHEMATICA, MathCad and MAPLE, blogs, related physical problems, please visit
http://numericalmethods.eng.usf.edu/topics/spline_method.html
END
http://numericalmethods.eng.usf.edu
2/21/2017
19
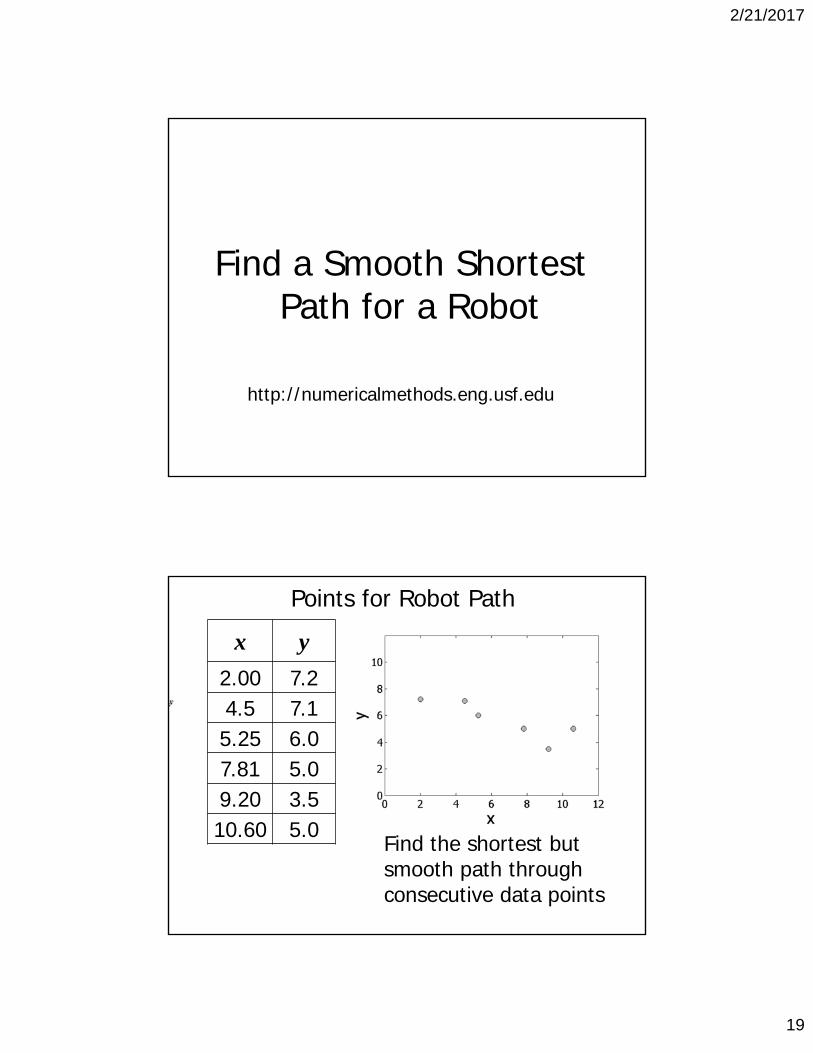
Find a Smooth Shortest Path for a Robot
http://numericalmethods.eng.usf.edu
Points for Robot Path
x y
2.00 7.24.5 7.15.25 6.07.81 5.09.20 3.510.60 5.0
Find the shortest but smooth path through consecutive data points

2/21/2017
20
Polynomial Interpolant Path
Spline Interpolant Path

2/21/2017
21
Compare Spline & Polynomial Interpolant Path
Length of pathPolynomial Interpolant=14.9
Spline Interpolant =12.9
THE END




![Block Sparse Compressed Sensing of Electroencephalogram ... · derivative of Gaussian function), a linear spline, a cubic spline, and a linear B spline and cubic B-spline. In [7],](https://static.fdocuments.net/doc/165x107/5f870bc34c82e452c7534b24/block-sparse-compressed-sensing-of-electroencephalogram-derivative-of-gaussian.jpg)













