Sliding Mode Controls in Partial Feedback Linearization applied to Unstable Ship Steering
6
In Proceedings of the 9 th IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC2012), Arenzano, Italy, September, 2012. Sliding Mode Controls in Partial Feedback Linearization applied to Unstable Ship Steering L. P. Perera * and C. Guedes Soares * *Centre for Marine Technology and Engineering (CENTEC), Instituto Superior Tecnico, Technical University of Lisbon, Portugal (Tel: +351 21 841 7468, email:[email protected] and [email protected]). Abstract: This paper focuses on a sliding mode controller for a partial feedback linearization applied unstable ship steering system. The ship steering system is analyzed in this study considering a nonlinear mathematical model that is derived by the second-order linear Nomoto model under unstable maneuverability conditions. The partial feedback linearization approach is proposed to simplify the nonlinear steering system, in which the rudder rate effects are removed. This separates the vessel steering system into two sectors of: linearized dynamics and internal dynamics. The sliding mode controller is applied to linearized dynamics. The stability of zero dynamics in internal dynamics is analyzed, as a part of the feedback linearization process. It is shown that the proposed sliding mode controller in vessel steering is robust against parameter and unstructured uncertainties, and bounded external disturbances. The robustness of the sliding mode controller is analyzed considering the Lyapunov stability theorem. Finally, the proposed controllers are simulated with respect to unstable steering conditions and successful computational results are also reported in this paper. Keywords: Unstable ship steering, Sliding mode control, Partial feedback linearization, Nonlinear vessel steering, Nomoto model, Internal dynamics. 1. INTRODUCTION Hydrodynamic forces and moments on a hull generate nonlinear steering conditions in ocean going vessels. The nonlinearities in vessel steering formulate stable and unstable manoeuvring conditions. Furthermore, sea and cargo conditions on a vessel can also contribute additional factors into stable and unstable steering conditions. The nonlinear steering conditions (ie. stable and unstable steering) are also the primarily factors that are affecting vessel directional or dynamic stability. It is observed that the same vessel can generate stable or unstable steering conditions under different trim and/or loading conditions (Kallstrom et al. (1979)). Furthermore, a vessel associated with poor stable steering conditions can become unstable under various water depths (Amerongen and Cate (1975)). In general, nonlinear steering conditions can be observed in ocean going vessels under various course changing manoeuvres. Almost all the control designs are based on some types of models, therefore a proper nonlinear vessel steering model that can include stable and unstable steering conditions is considered in this study. One should note that the vessel steering parameters are commonly assumed to be deterministic in the recent literature. However, the stochastic ocean behaviour influences vessel steering, the ocean dynamics cannot be isolated from vessel steering. The above assumption cannot be held against realistic environmental conditions (i.e. sea and wind conditions). Therefore, parameter variations in vessel steering will occur, which can generate system or model uncertainties that eventually affect the controller design process. When the nonlinear vessel steering model fails to include system-model uncertainties, the controller should be robust against the system-model uncertainties. Therefore, a nonlinear controller that is robust against parameter and unstructured uncertainties and external disturbances in an ocean going vessel is considered in this paper. In this study, a sliding mode controller, one of the nonlinear control approaches, is proposed to overcome the challenges faced by vessel steering. The sliding mode control approach is proposed due to several reasons (Slotine and Li (1991)): Firstly, the controller can include parameter and unstructured uncertainties; secondly, it can quantify the response of modelling and performance trade-offs; thirdly, it can reject bounded external disturbances. However, the sliding mode controller design process can often be degraded with the complexity between inputs (ie. rudder angle and rudder rate) and outputs (ie. vessel heading or course) in vessel steering. Therefore, to simplify the complexity between inputs and outputs and to preserve its nonlinear behaviour in vessel steering, a feedback linearization process is proposed in this study. 2. MATHEMATICAL MODEL FOR VESSEL STEERING The second-order Nomoto model (Nomoto et al. (1957)) can be considered as: ( ( R R R T K r r T T r T T δ δ + = + + + & & & & 3 2 1 2 1 (1) where the respective vessel steering parameters are presented as: T 1 , T 2 , T 3 and K R . The second-order Nomoto model, in (1), can be written with respect the vessel heading angle, ψ, of the vessel:
description
This paper focuses on a sliding mode controller for a partial feedback linearization appliedunstable ship steering system. The ship steering system is analyzed in this study considering a nonlinearmathematical model that is derived by the second-order linear Nomoto model under unstablemaneuverability conditions. The partial feedback linearization approach is proposed to simplify thenonlinear steering system, in which the rudder rate effects are removed. This separates the vessel steeringsystem into two sectors of: linearized dynamics and internal dynamics. The sliding mode controller isapplied to linearized dynamics. The stability of zero dynamics in internal dynamics is analyzed, as a partof the feedback linearization process. It is shown that the proposed sliding mode controller in vesselsteering is robust against parameter and unstructured uncertainties, and bounded external disturbances.The robustness of the sliding mode controller is analyzed considering the Lyapunov stability theorem.Finally, the proposed controllers are simulated with respect to unstable steering conditions and successfulcomputational results are also reported in this paper.
Transcript of Sliding Mode Controls in Partial Feedback Linearization applied to Unstable Ship Steering

In Proceedings of the 9th IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC2012), Arenzano, Italy, September, 2012.
Sliding Mode Controls in Partial Feedback Linearization applied to Unstable Ship Steering
L. P. Perera * and C. Guedes Soares *
*Centre for Marine Technology and Engineering (CENTEC), Instituto Superior Tecnico, Technical University of Lisbon, Portugal (Tel: +351 21 841 7468, email:[email protected] and [email protected]).
Abstract: This paper focuses on a sliding mode controller for a partial feedback linearization applied unstable ship steering system. The ship steering system is analyzed in this study considering a nonlinear mathematical model that is derived by the second-order linear Nomoto model under unstable maneuverability conditions. The partial feedback linearization approach is proposed to simplify the nonlinear steering system, in which the rudder rate effects are removed. This separates the vessel steering system into two sectors of: linearized dynamics and internal dynamics. The sliding mode controller is applied to linearized dynamics. The stability of zero dynamics in internal dynamics is analyzed, as a part of the feedback linearization process. It is shown that the proposed sliding mode controller in vessel steering is robust against parameter and unstructured uncertainties, and bounded external disturbances. The robustness of the sliding mode controller is analyzed considering the Lyapunov stability theorem. Finally, the proposed controllers are simulated with respect to unstable steering conditions and successful computational results are also reported in this paper.
Keywords: Unstable ship steering, Sliding mode control, Partial feedback linearization, Nonlinear vessel steering, Nomoto model, Internal dynamics.
1. INTRODUCTION
Hydrodynamic forces and moments on a hull generate nonlinear steering conditions in ocean going vessels. The nonlinearities in vessel steering formulate stable and unstable manoeuvring conditions. Furthermore, sea and cargo conditions on a vessel can also contribute additional factors into stable and unstable steering conditions. The nonlinear steering conditions (ie. stable and unstable steering) are also the primarily factors that are affecting vessel directional or dynamic stability. It is observed that the same vessel can generate stable or unstable steering conditions under different trim and/or loading conditions (Kallstrom et al. (1979)). Furthermore, a vessel associated with poor stable steering conditions can become unstable under various water depths (Amerongen and Cate (1975)).
In general, nonlinear steering conditions can be observed in ocean going vessels under various course changing manoeuvres. Almost all the control designs are based on some types of models, therefore a proper nonlinear vessel steering model that can include stable and unstable steering conditions is considered in this study. One should note that the vessel steering parameters are commonly assumed to be deterministic in the recent literature. However, the stochastic ocean behaviour influences vessel steering, the ocean dynamics cannot be isolated from vessel steering. The above assumption cannot be held against realistic environmental conditions (i.e. sea and wind conditions). Therefore, parameter variations in vessel steering will occur, which can generate system or model uncertainties that eventually affect the controller design process. When the nonlinear vessel
steering model fails to include system-model uncertainties, the controller should be robust against the system-model uncertainties. Therefore, a nonlinear controller that is robust against parameter and unstructured uncertainties and external disturbances in an ocean going vessel is considered in this paper.
In this study, a sliding mode controller, one of the nonlinear control approaches, is proposed to overcome the challenges faced by vessel steering. The sliding mode control approach is proposed due to several reasons (Slotine and Li (1991)): Firstly, the controller can include parameter and unstructured uncertainties; secondly, it can quantify the response of modelling and performance trade-offs; thirdly, it can reject bounded external disturbances. However, the sliding mode controller design process can often be degraded with the complexity between inputs (ie. rudder angle and rudder rate) and outputs (ie. vessel heading or course) in vessel steering. Therefore, to simplify the complexity between inputs and outputs and to preserve its nonlinear behaviour in vessel steering, a feedback linearization process is proposed in this study.
2. MATHEMATICAL MODEL FOR VESSEL STEERING
The second-order Nomoto model (Nomoto et al. (1957)) can be considered as:
( ) ( )RRR TKrrTTrTT δδ +=+++ &&&& 32121 (1)
where the respective vessel steering parameters are presented as: T1, T2, T3 and KR. The second-order Nomoto model, in (1), can be written with respect the vessel heading angle, ψ, of the vessel:

( )RRR T
TT
K
TTTTδδψψψ +=+
++ &&&& 3
212121
)3( 111 (2)
The second-order Nomoto model in (2) is adequate for course keeping manoeuvres, but this model may not be sufficient for course changing manoeuvres, where nonlinear steering conditions can be observed. Therefore, the vessel steering model presented in (2) should be modified. The nonlinear steering conditions, where the rudder angles larger than 5o can be represented by replacing the heading rate, ψ& ,
by a nonlinear function, ( )ψ&HK R , that was initially
proposed in (Bech and Smitt (1969)). The nonlinear function, ( )ψ&H , is called as a reversed spiral curve that can
be approximated to a nonlinear function, which can be written as (Amerongen and Cate, 1975):
( ) 321 ψnψnψH &&& += (3)
where the respective vessel steering parameters are presented as: n1, and n2. The positive and negative conditions of the parameter, n1, determines the stability condition in vessel steering: n1 is positive in course stable steering and n1 is negative in course unstable steering (Fossen, and Paulsen (1992)). Applying (3) into (2), the nonlinear vessel steering system can be written as:
( ) ( )RRddnndd δδψψψψ +++−−= &&&&& 3213
221)3( (4)
where the initial parameters of nonlinear vessel steering are defined as: 211 /1/1 TTd += , 212 / TTKd R= and 33 Td = . Hence,
(4) can be rewritten as:
RR δβδβψαψαψαψ &&&&& 21323
1)3( ++++= (5)
where the final parameters of nonlinear vessel steering can be defined as: α1 = -n2d2, α2 = -n1d2, α3 = -d1, β1 = d2, and β2
= d2d3. Therefore, the nonlinear vessel steering system in (5) is used as the system model for control design in this study.
One should note that the nonlinear vessel steering system presented in (5) consists of two control inputs; rudder angle and rudder rate. However, the simultaneous control of rudder angle and rudder rate with respect to vessel heading is a complicated control process. Therefore, to simplify the nonlinear vessel steering system in (5), a feedback linearization approach is proposed.
3. FEEDBACK LINEARIZATION
The nonlinear vessel steering system in (5) is considered for feedback linearization. However, one should note that the system in (5) is not in an affine format (Guay, 2001). Hence, to transform the nonlinear vessel steering system into an affine format, a special algebraic coordinate transformation is proposed and that can be written as:
Rδβψx
ψx
ψx
23
2
1
−===
&&
& (6)
Applying the coordinate transformation in (6), the nonlinear vessel steering system presented in (5) can be written as:
( ) R
R
xxxx
xx
xx
δβαβααα
δβ
23133223
213
232
21
++++=
+==
&
&
&
(7)
One should note that the rudder angle as a main control input is illustrated in (7), where the rudder rate effects are removed. The nonlinear vessel steering system presented in (7) can be written in a matrix format:
xuxGxFx )()( +=& (8)
where the respective matrices can be written as: [ ] Rx
T uxxxx δ== ,321 (9)
++=
33223
21
3
2
)(
xxx
x
x
xF
ααα
( )
+=
231
2
0
)(
βαββxG
The vessel heading angle, ,ψ is considered as an output of
the vessel steering system and that can be written as:
ψ== )(xhy (10)
Hence, considering the nonlinear vessel steering system in (8) and the output in (10), the feedback linearization process is accomplished.
As the first step of the feedback linearization process, the full state or partial feedback linearization capabilities of the nonlinear vessel steering system in (8) should be investigated. This has been done by a Lie derivatives based transformation of the system output. The first Lie derivative of the system output in (10) can be written as (Levine, 2011):
[ ] 0
0
001
0)()()(
)()(
)()(
1
2
1
2321
101
=
=
∂∂
∂∂
∂∂=
∂∂==
ββ
ββ
x
xh
x
xh
x
xh
xGx
xhxhLxhLL GFG
(11)
Since, the first Lie derivative of the nonlinear vessel steering system output is, hLL FG
0 = 0. Then, the second Lie derivative
of the system output in (10) should be derived and that can be written as:
++
∂∂
∂∂
∂∂=
∂∂=
33223
21
3
2
321
1
111
)()()(
)()(
)(
xxx
x
x
x
xh
x
xh
x
xhL
xFy
xhLxhLL
G
GFG
ααα
[ ] [ ]
[ ] 0
0
010
001
2
1
2
21
33223
21
3
21
≠=
=
=
++=
βββ
αααxL
xxx
x
x
L GG
(12)
Since, the second Lie derivative of the nonlinear vessel steering system output is, 0)(1 ≠xhLL FG , it can be concluded
that the relative degree of the system is of the order 2, where the nonlinear vessel steering system is of the order 3. One should note that the relative degree order is less than the system order. Therefore, the nonlinear vessel steering system cannot be simplified under full state feedback linearization

but partial feedback linearization. The partial feedback linearization applied nonlinear vessel steering system in (8) can be written as:
10
1 )()( xxhxhLz F === (13)
)()(
)(12 xF
x
xhxhLz F ∂
∂==
2
33223
21
3
2
321
)()()(x
xxx
x
x
x
xh
x
xh
x
xh =
++
∂∂
∂∂
∂∂=
ααα
The resulting feedback controller law under the partial feedback linearization applied nonlinear vessel steering system can be written as:
( ) ( )( ) ( )xxx vxvxx
u +−=+−= 32
11
βα
β (14)
where vx is a new control input that is often referred as a synthetic control input. The respective control functions of α(x) and β(x) are derived as:
( ) [ ] 3
33223
21
3
22 010)( x
xxx
x
x
xhLx F =
++==
αααα
( ) [ ]( )
2
231
211
0
010)( ββαβ
ββ =
+== xhLLx FG
(15)
Hence, the partial feedback linearization applied nonlinear vessel steering system in (14) can be summarized as:
xvz
zz
==
2
21
&
& (16)
Internal dynamics of the partial feedback linearization applied nonlinear vessel steering system in (16) can be written as:
xvzzxx
+=−−+
2
1222
3213
2
13 β
βαααββ
& (17)
Hence, the stability conditions of internal dynamics in (17) should be further investigated to observe the overall system stability. The stability of internal dynamics can be observed by its zero dynamics. Internal dynamics will achieve zero dynamics by formulating the system output to be zero, and that can be written as:
0 ;0 ;0 22111 ====== xvzzxzx && (18)
Applying the zero dynamics conditions derived in (18) into internal dynamics of the vessel steering system in (17) can be written as:
032
13 =+ xx
ββ
& (19)
The conditions of zero dynamics in (19) will determine the overall system stability of partial feedback linearization applied vessel steering. The parameters in nonlinear vessel steering can be written as β1 >0 and β2 >0. Hence, the parameters always satisfy the condition of 0/ 21 >ββ .
Therefore, the system zero dynamics are asymptotically stable, where the pole of internal dynamics is on the left-half plan of the root locus. Hence, stable internal dynamics for the
partial feedback linearization applied nonlinear vessel steering system can be concluded.
4. CONTROL SYSTEM
The proposed closed-loop control system is presented in Figure 1 an consists of three main units: pre-filter, vessel steering system, and control system. The pre-filter formulates the reference heading angle and rate with respect to the required heading angle, where the heading error will be calculated. Then the angle difference (ie. heading error) will feedback into the control system. The control system will formulate appropriate control inputs that to be implemented on the rudder actuation system. The rudder angle variations will generate the required steering conditions to achieve the desired heading angle in vessel steering. Two control approaches are considered in this study: sliding mode control and PID control.
4.1 Pre-filter Approach
The main objective of the pre-filter is to obtain a smooth transition for the vessel reference heading, rψ , and rate rψ&
with respect to the required heading angle, crψ& . The
proposed pre-filter can be written as:
crrrrrrrr ψωψωψωζψ 222 =++ &&& (20)
where ζr and ωr are the pre-filter parameters.
4.2 Vessel Steering System
The partial feedback linearization applied vessel steering system for controller design is further discussed in this section. To derive the sliding mode controller, the mathematical model of vessel steering derived in (16) can be written in a generalized format:
21 zz =& (21)
zx wvz +=2& (22)
where wz is matched parameter uncertainties, unstructured uncertainties and disturbances in vessel steering that are bounded.
4.3 Sliding Mode Control.
In sliding mode control (Khalil, 2002), a feedback control law that constrains the motions of vessel steering to a sliding manifold is introduced. The sliding manifold is a hyper surface that is instated in the state space of vessel steering.
Fig. 1. Control System.
One should note that the sliding manifold is independent of the vessel steering system structure, therefore sliding mode control is inherently robust to parameter uncertainties and un-modelled dynamics. Furthermore, the nonlinearities associated with vessel steering near the zero rudder angle position can be reduced by the sliding manifold. This phenomenon can also be seen as a model reduction in vessel steering.
The vessel steering system behaviour under sliding mode control can be divided into two phases: reaching phase and sliding phase. In the reaching phase, the vessel steering trajectory that is starting in an initial condition moves toward the sliding manifold. In the sliding phase, the trajectory that is on the sliding manifold moves toward the origin of the equilibrium point (ie. zero rudder angle). When the system trajectory reaches the sliding manifold, the system dynamics are constrained to a reduced-order model. Therefore, the system nonlinearities associated with vessel steering are reduced by the manifold. The sliding manifold, s = 0, that constrains the motions of vessel steering can be written as:
0211 =+= eeas (23)
where a1 > 0 is a parameter of the sliding manifold that is related to the inclination of the manifold. Therefore, the sliding manifold guarantees that, the system errors e1 and e2 will be minimized as the time passes. Furthermore, the inclination of the sliding manifold is related to the rate of reduction in the system errors. The respective system errors presented in (23), e1 and e2, can be written as:
; 2211 rr zzezze &−=−= (24)
where rrz ψ= is vessel reference heading and
rz& is vessel
reference heading rate. One should note that the sliding surface is based on the errors from all system states rather than a single output error in vessel steering. Therefore, the controller will minimize the respective errors in all state variables, rather than on a single state, which is another advantage in this approach. The differentiation of the sliding manifold in (23) can be written as:
211 eeas &&& += (25)
Applying (24), the differentiation of the sliding manifold in (25) can be further illustrated as:
( ) rr zzzzas &&&&&& −+−= 211 (26)
Applying (21) and (22) into (26) can be written as:
zrxr wzvzazas +−+−= &&&&& 111 (27)
The stability conditions of nonlinear control systems are often analyzed by Lyapunov stability theorem. Hence, a Lyapunov candidate function that is considered for the stability analysis of the sliding manifold can be written as:
21 2
1sV = (28)
Applying (27) into the differentiated Lyapunov candidate function in (28) can be written as:
( ) xzrr svwzzazasssV ++−−== &&&&&&1111 (29)
One should note that the vessel steering system is not required to follow complete pre-filter conditions. Only the required heading angle variation should be achieved. Therefore, the pre-filter reference heading rate conditions are neglected, where 0≠= rrz ψ 0== rrz ψ&& and 0== rrz ψ&&&& .
However, the removal of the reference heading conditions can also reduce the high control gain requirements in vessel steering. Hence, (29) can be written as:
( ) xz svwzasV ++= 211& (30)
Consider a known function, )(zρ , that satisfies the conditions
of
)(21 zwza z ρ≤+ (31)
The parameter uncertainties, unstructured uncertainties and disturbances that are bounded can also be included into the function, )(zρ . Hence, (31) can be written as:
( ) xsvzsV +≤ ρ& (32)
Furthermore, (32) can be further modified as:
( )[ ] 0)sgn( ≤+≤ xvszsV ρ& (33)
where the function, sgn(s), can be presented by:
<−=>
=01
00
01
s for
s for
s for
sgn(s) (34)
One should note that the function, sgn(s), is a discontinuous function. Therefore, this approach introduces discontinuity into the controller. Hence, the feedback control law that satisfies the condition in (33) can be written as:
)sgn()( szv x β−= (35)
where the functions, β(z), is defined as:
)()( 0βρβ +≥ zz (36)
where 0 0 >β is a known constant. Hence, considering (35),
and (36), the modified feedback controller law can be written as:
( ) )sgn()(1
32
szxu x ββ
−−= (37)
Applying the function derived in (36) into (33) can be written as:
( )[ ] svsxsV x 01 )sgn( βρ −≤+≤& (38)
One should note that the constant, 0β , can be chosen
arbitrarily large, in which case (38) will achieve semi-negative definite. Therefore, the feedback control law presented in (37) will achieve semi-global stability against the nonlinear vessel steering conditions. Therefore, the vessel steering system reaches the sliding manifold (s = 0) in finite time. However, once it reaches the sliding manifold, it will not leave from the sliding manifold. Furthermore, it moves towards the origin under chattering effects. The chattering effects, the system response oscillations on the sliding manifold as presented in Perera and Guedes Soares (2012a), are one drawback in sliding mode control that is due to the discontinuous function, sgn(s). Therefore, a continuous
function, sat(s), that replaces the discontinuous functions, sgn(s), is proposed. The feedback control law in (35) considering the continuous function, sat(s), can be written as:
)()( ssatxv x β−= (39)
where the function sat(s) is presented in:
εε
εε
ε
−≤−
<<−≥
=
s
s
s
ssat
for 1
for s
for 1
)( (40)
Hence, considering (39), the modified feedback controller law derived can be written as:
( ) )()(1
32
ssatxxu x ββ
−−= (41)
However, the controller stability with respect to the feedback control law in (41) should be further analyzed. Considering a Lyapunov candidate function that can be written as:
212 2
1eV = (42)
The differentiation of the Lyapunov candidate function in (42) can be written as:
21112 eeeeV == && (43)
Applying (23) into (43) can be written as:
12112 seeaV +−=& (44)
A parameter, θ, that satisfies the condition of 0 ≤ θ ≤ 1, applying into (44) can be written as:
( ) 1211
2112 1 seeaeaV +−−−= θθ& (45)
One should note that the condition |s| ≤ ε, (45) can be written as:
( ) 1211
2112 1 eeaeaV εθθ +−−−≤& (46)
Hence, (46) can be written as:
( ) 0ea1V 2112 ≤θ−−≤& (47)
That should also satisfy the condition of:
01211 ≤+− eea εθ (48)
The condition in (48) can be further elaborated as:
11 eaθε ≤ (49)
One should note that the semi-negative definite condition in (47) can be satisfied under the conditions in (49). Therefore, the controller in (41) will also achieve semi-global stability. Hence, the trajectory of vessel steering reaches the manifold region, |s| ≤ ε, in finite time. Once it reaches the manifold region, |s| ≤ ε, it will move towards the bounded region of Ωe in finite time. Once it reaches the bounded region of Ωe, it will stay in the region. The bounded region, Ωe, can be written as:
εθε ≤≤= s:eaΩ e 11 (50)
The larger manifold region, ε, in the function, sat(s), generates a larger steady state error but a smoother control signal. The smaller manifold region, ε, in the function, sat(s),
generates a smaller steady state error but the chattering effects will be resulted.
5. COMPUTATIONAL SIMULATION
The parameters from the vessel steering system have been extracted from the study in (Ohtsu et al. (1979)) that are based on ”Shioji Maru” vessel with physical conditions of: length 41.70 (m), breadth 8.0 (m), gross tons 331.31 (g.tons), max speed 11.49 (knots). The vessel linear parameters are considered as: T1 = 7.0 (s), T2 = 2.8 (s), T3 = 3.8 (s) and KR = 0.11 (1/s). The vessel nonlinear parameters are assumed as: n1 = -2.20 (s) and n2 = 5.92 (s3/rad2). The parameter of the feedback control law in sliding mode control is considered as: β0 = 0.01 (rad/s2). The parameters for PID control are assumed as: kP =6.0 (1/s2) , kI = 0.25 (1/s3) and kD = 0.5 (1/s).
The white Gaussian noise type disturbances are also included into the system to evaluate the robustness of both controllers. It is assumed that the rudder angle is associated with the maximum limit of π/4 (rad), therefore rudder angle variation within this region due to the controller is expected. The computational simulations for sliding mode and PID controls under unstable vessel steering are presented in Figures 2 and 3. A situation of larger variations in vessel reference heading in relatively short time periods is considered for these simulations to evaluate the control performances.
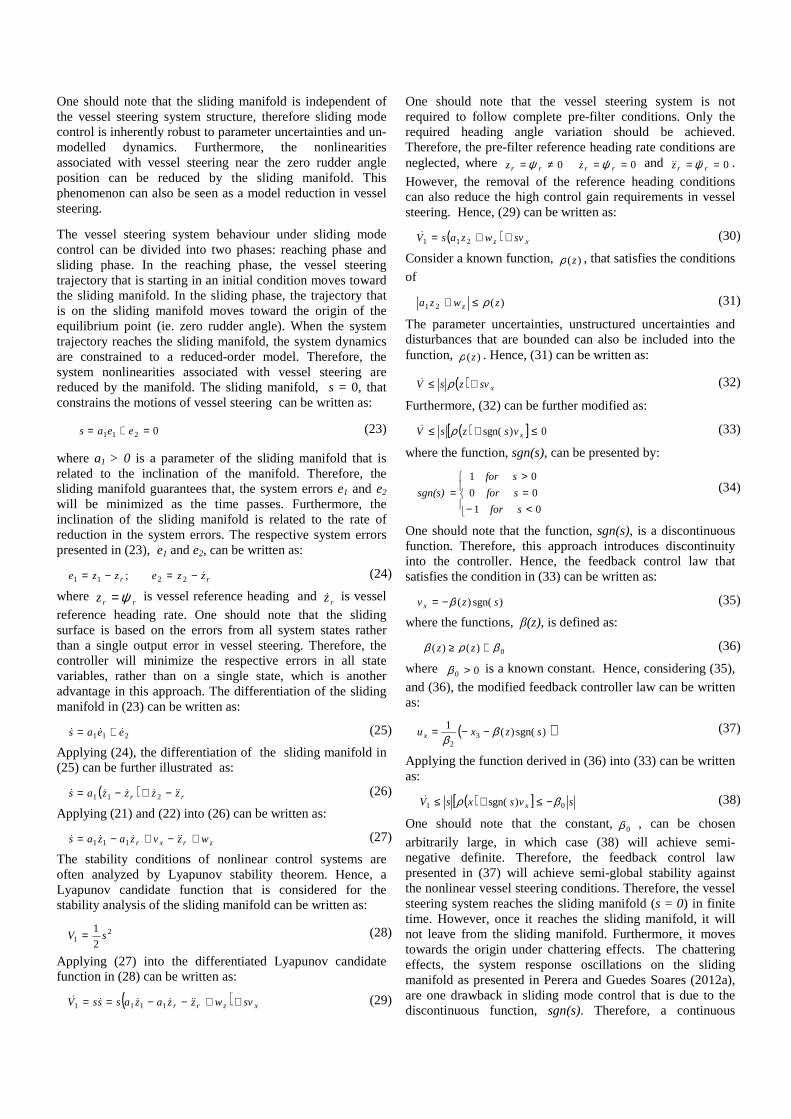
In the top plot of Figure 2, vessel reference heading, vessel actual heading with sliding mode control with sgn(s) function (SMC sgn(.)), vessel actual heading with sliding mode control with sat(s) function (SMC sat(.)), and vessel actual heading with PID control are presented. As presented in the plot; the sliding mode controller with sgn(s) function has captured vessel reference heading faster; the sliding mode controller with sat(s) function has captured vessel reference heading within the same-time interval with a small steady state error; the PID controller has not propeller captured vessel reference heading. In the bottom plot of Figure 3, vessel heading errors of sliding mode control with sgn(s) function, sliding mode control with sat(s) function, and PID control with respect to vessel reference heading are presented.
Fig. 2. Simulations of course changing manoeuvres

In the top plot of Figure 3, rudder angle variations of sliding mode control with sgn(s) function, sliding mode control with sat(s) function, and PID control are presented. As noted from the figure, sliding mode control with sgn(s) function, and sliding mode control with sat(s) function, have satisfied the rudder angle limitations, where PID control has exceeded rudder angle limitations in some situations. It is observed that the vessel actual heading angle under sliding mode controller with the function sgn(s) reaches the actual heading with some chattering effects. However, the vessel actual heading under sliding mode controller with the function sat(s) reaches the actual heading with a small steady state error. The plots of rudder angle and rate in sliding mode and PID controls are contained noise control output due to external disturbances that were included on vessel steering, where the control input is trying to compensate. However, PID control has not presented any success on compensation of the external disturbances, where larger oscillations are presented by vessel heading.
6. CONCLUSIONS
This paper introduces a sliding mode controller approach for unstable ship steering that is a part of the intelligent navigation system that is developed in Perera and Guedes Soares (2012a), (2012b) and Perera et al. (2012). As presented in the computational results the contribution of the controller can be summarized as:
• Actual vessel heading has achieved reference vessel heading in a shorter time period under sliding mode control with respect to PID control.
• Negligible overshoot conditions have been achieved by vessel response under nonlinear steering in sliding mode control with respect to PID control.
The successful results obtained in this study shows the sliding mode controller capabilities to overcome the challenges faced by vessel steering under parameter uncertainties, un-modelled dynamics, and external disturbances that is the main contribution in this study.
ACKNOWLEDGEMENTS
This work has been made within the project ”Methodology for ships manoeuvrability tests with self-propelled models”, which is being funded by the Portuguese Foundation for Science and Technology under contract PTDC/TRA/74332 /2006. The research work of the first author has been supported by a Doctoral Fellowship of the Portuguese Foundation for Science and Technology under contract SFRH/BD/46270/2008.
REFERENCES
Amerongen, J. V. and Cate, A. J. U. T., (1975) “Model reference adaptive autopilots for ship,” Automatica, vol. 11, pp. 441–449.
Bech, M., and Smitt, L. W., (1969) “Analogue simulations of ship manoeuvers,” Report No. Hy-14, hydro-og Aerodynamisk Laboratorium, Lyngby, Denmark.
Davidson, K.S.M, Schiff, L.I., (1946) "Turning and Course keeping qualities", Trans. SNAME vol. 54, pp. 152-200
Fossen, T. I. and Paulsen, M. J. , (1992) “Adaptive feedback linearization applied to steering of ships,” in Proceedings of the 1st IEEE Conference on Control Applications, Ohio, USA.
Guay, M., (2001) “Orbital feedback linearization of multi-input control affine systems,” in Proceedings of the American Control Conference, Arlington, VA, USA, pp. 3630–3635.
Kallstrom, C. G., Astrom, K. J., Thorell, N. E., Eriksson, J., and Sten, L., (1979) “Adaptive autopilots for tankers,” Automatica, vol. 15, pp. 241–254.
Khalil, H. K., Nonlinear Systems, 3rd ed. NJ, USA: Prentice Hall, Inc, 2002.
Levine, W.S., Ed., Control System Advanced Methods, 1st ed. FL, USA: Taylor and Francis Group, 2011.
Nomoto, K., Taugchi, K., Honda, K., and Hirano, S., (1957) “On the steering qualities of ships,” International Shipbulding Progress, vol. 4, pp. 354–370.
Perera, L. P., Guedes Soares, C., (2012a), A Nonlinear control approach for a vessel steering system. Maritime Technology and Engineering, C. Guedes Soares (Eds.), Taylor & Francis Group, London, UK, (in Print).
Perera, L. P., Guedes Soares, C., (2012b), "Pre-filtered Sliding Mode Control for Nonlinear Ship Steering associated with Disturbances," Ocean Engineering, vol. 51, 2012, pp. 49-62.
Perera, L. P., Carvalho, J. P. and Guedes Soares, C., (2012) “Intelligent Ocean Navigation and Fuzzy-Bayesian Decision-Action Formulation,” IEEE Journal of Oceanic Engineering, vol 37, no 2, 2012, pp 204-219.
Ohtsu, K., Horigomes, M., and Kitagawa, G., “A new ship’s auto pilot design through a stochastic model,” Automatica, vol. 15, pp. 255–268, 1979.
Slotine, J. J. E., and Li, W., Applied Nonlinear Control. New Jersey, USA: Prentice Hall, 1991.
Fig. 3. Rudder angle and external disturbances




![Marine Processes Studies and Marine Engineering · feedback linearization control [1], the sliding mode control [16],decoupling control [6], hybrid control method [2] and vector control](https://static.fdocuments.net/doc/165x107/5e950f8858125d77275895ae/marine-processes-studies-and-marine-feedback-linearization-control-1-the-sliding.jpg)