Sistema di scansione a multicanale (analogico/digitale) di...
13
Sistema di scansione a multicanale (analogico/digitale) di sensori di inquinamento ambientale sincronizzato con GPS o via ethernet basato su microcontrollore Cortex ARM per esperimento SMELLER Gianluigi Pessina, Lorenzo Rota * UNIVERSITÀ DEGLI STUDI DI MILANO BICOCCA FACOLTÀ DI SCIENZE MATEMATICHE FISICHE E NATURALI I STITUTO NAZIONALE DI FISICA NUCLEARE, SEZIONE DI MILANO BICOCCA INFN MIB * Ora con: Institute for Data Processing and Electronics, Karlsruhe Institute of Technology (KIT)
Transcript of Sistema di scansione a multicanale (analogico/digitale) di...

Sistema di scansione a multicanale (analogico/digitale) di sensori di inquinamento ambientale sincronizzato con GPS o via ethernet basato su microcontrollore Cortex ARM per
esperimento SMELLER
Gianluigi Pessina, Lorenzo Rota*
UNIVERSITÀ DEGLI STUDI DI MILANO BICOCCAFACOLTÀ DI SCIENZE MATEMATICHE FISICHE E NATURALI
ISTITUTO NAZIONALE DI FISICA NUCLEARE, SEZIONE DI MILANO BICOCCAINFN MIB
* Ora con: Institute for Data Processing and Electronics, Karlsruhe Institute of Technology (KIT)
Outline
• Il sistema di acquisizione dei segnali dai sensori;
• I metodi di sincronizzazione (triggered, GPS, TCP/IP, …)
2

Il Sistema di acquisizione dei segnali dai sensori
Veicoli in transito
Sensori
Interfaccia analogico /digitale
Unità Centrale Analisi in tempo reale
Acquisizione dati
Velocità Fotocamera Emissioni
Acquisizione dati
IR
Eventuale FermoVeicolo (opzione)
ReteARCHIVIAZIONE(analisi a lungo termine)Obiettivo:
introdurre nella viabilità urbana un sistema di controllo che rilevi l’inquinamento del mezzo al suo passaggio in prossimità della centrale di rilevamento. Le emissioni del mezzo e la sua identità (attraverso una telecamera) devono essere acquisite e catalogate in tempo reale, al passaggio del mezzo.
3
L’argomento di questa relazione

Il Sistema di acquisizione dei segnali dai sensori
1001
1002
1003
TCPSERVER
Unità centrale 1
2
3
TCP
CLIENT
Rete Ethernet
Acquisizione dei dati di inquinamento istantanei da tutti i sensori e loro trasmissione all’unità centrale.Ad ogni dato trasmesso è aggiunta l’etichetta temporale che ne consente l’identificazione ed assegnazione al veicolo.
Sensore_1
Sensore_2
Sensore_3
Sensore_n
Il sistema si compone in una serie di schede intelligenti capaci di leggere i segnali provenienti dai sensori, che potranno avere differenti protocolli di comunicazione, per convogliarli all’unità centrale usando un unico protocollo di comunicazione: il TCP/IP (la rete Ethernet standard):
Più sensori per ogni postazione Sistema flessibile basato su microcontrollore ARM Cortex M3
Protocolli supportati: SPI, I2C, CAN‐BUS, Serial, Ethernet, … Real Time Operating System per la gestione dei diverse obiettivi (lettura, sincronizzazione,
trasmissione…)
Schede intelligenti 4

Schede intelligenti
5
Le schede sono state progettate basate sull’uso dei microprocessori a 32 bit della serie ARM. Un microprocessore che ha avuto una notevole applicazione nel campo della telefonia cellulare e nei tablet.
La famiglia ARM comprende un’innumerevole quantità di modelli differenti aventi un grado di sofisticazione dipendente dall’applicazione a cui devono essere dedicati.
Noi abbiamo sfruttato questa famiglia di processori perché in grado di supportare, con le loro librerie, molti protocolli di comunicazione: UART, I2C, SPI, CAN, USB, TCP/IP.

Il Sistema di acquisizione dei segnali dai sensori
1001
1002
1003
TCPSERVER
Unità centrale 1
2
3
TCP
CLIENT
Rete Ethernet
Sensore_1
Sensore_2
Sensore_3
Sensore_n
Schede intelligenti
Una proprietà importante che deve essere soddisfatta è che il sistema di schede sia in grado di mostrare una sincronizzazione reciproca, affinché non si corra il rischio di assegnare i parametri misurati ad autoveicoli diversi:
Sincronizzazione degli eventi tra le diverse postazioni (assegnazione dei dati ai veicoli senza ambiguità, o confusione)
6
Metodi di sincronizzazione studiati:
• Sincronizzazione basata su trigger o avviso di misura;
• Sincronizzazione basata su GPS (Global Positioning System);
• Sincronizzazione derivato da TCP/IP.
7

Sincronizzazione basata su trigger o avviso di misura
8
1001
1002
1003
TCPSERVER
Unità centrale 1
2
3
TCP
CLIENT
Rete Ethernet
Sensore_1
Sensore_2
Sensore_3
Sensore_n
Schede intelligenti
Sensore_Master (telecamera)
= Segnale di sincronizzazione
All’avvicendarsi del veicolo il sensore master lo scorge ed allerta tutte le schede imponendo l’effettuazione delle misure a tutti i sensori interessati.
Con questa tecnica l’assegnazione delle misure ad ogni veicolo non dà luogo a dubbi. Soprattutto se al segnale di inizio misura fa seguito il segnale di fine misura.
Il segnale di inizio misura necessita di una connessione addizionale in aggiunta a quelle di trasmissione dati.

Sincronizzazione senza segnale di start
9
È stata studiata l’alternativa alla presenza del segnale di start.
Questa alternativa non può che prevedere la sincronizzazione temporale degli orologi di tutte le schede in modo da potere agganciare l’etichetta tempo ad ogni misura.
La contemporaneità delle misure consente di risalire ad ogni autoveicolo analizzato.
Sono state sviluppate 2 tecniche:
1. sfruttamento del segnale GPS, Global Positioning System;
2. Utilizzo dell’orologio del sistema centrale di acquisizione, attraverso il protocollo di trasmissione TCP/IP.

Sincronizzazione periodica relativa
1
10
100
1000
10000
100000
1 10 100 1000
Ritardo (µs)
secondi trascorsi dall'ultima sincronizzazione
Deriva temporale degli orologi
1 ppm
5 ppm
10 ppm
50 ppm
limite
• L’orologio interno alle schede intelligenti è basato su di un oscillatore che opera ad una frequenza di 100 MHz;
• Precisione frequenza dell’oscillatore ≈ 50 ppm(parti per milione)
Per mantenere la precisione reciproca migliore di 1 millisec, come obiettivo di sicurezza, le schede si devono mandare un messaggio di sincronizzazione almeno ogni 20 secondi
10
Tuttavia, gli errori introdotti dalla latenza dei messaggi di sincronizzazione potrebbero introdurre a loro volta incertezze temporali.Quindi, per garantire contenuti questi errori, conviene avvalersi di supporti opportuni.
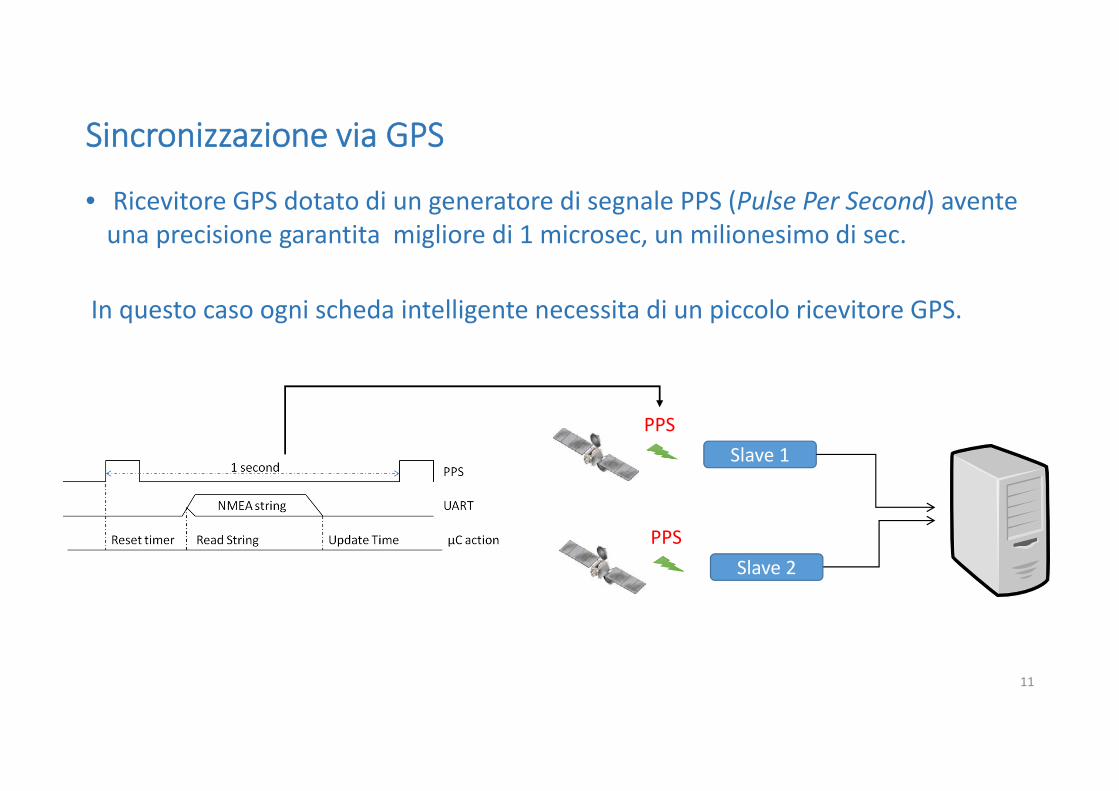
Sincronizzazione via GPS
• Ricevitore GPS dotato di un generatore di segnale PPS (Pulse Per Second) avente una precisione garantita migliore di 1 microsec, un milionesimo di sec.
Slave 1PPS
Slave 2PPS
11
In questo caso ogni scheda intelligente necessita di un piccolo ricevitore GPS.

Sincronizzazione via TCP/IPIn questo caso l’unità centrale invia la stringa col segnale orario ad ogni scheda intelligente e si aspetta un messaggio di risposta da ogni unità, alla quale replica. Sia l’unità centrale che le periferiche misurano gli intervalli di tempo trascorsi nei ping‐pong dei messaggi.
La misura degli intervalli di tempo consente di compensare la perdita di tempo dovuta alla latenza dei messaggi nella rete.
12
Errore assoluto:< 20 microsec
Con questa tecnica non dobbiamo aggiungere nessun ausilio pur ottenendo una precisione più che adeguata.

Conclusioni
13
• È stato studiato e realizzato un sistema di schede intelligenti basate su microprocessore a 32 bt della serie ARM, in grado di convogliare verso il sistema di acquisizione ed analisi centrale, secondo un unico protocollo di comunicazione TCP/IP, i dati letti dai sensori di inquinamento dell’esperimento SMELLER;
• I dati misurati dai sensori possono seguire differenti protocolli di comunicazione: SPI, UART, I2C, CAN, …
• Il sistema di schede è in grado di sincronizzarsi in modo da assegnare in modo non ambiguo ogni misura al corrispondente veicolo. La sincronizzazione può avvenire con segnale di start dalla telecamera (master) o mediante l’aggiunta di un’etichetta temporale la cui precisione è derivata dal GPS, Global Positioning System, o mediante protocollo TCP/IP.
• La precisione di sincronizzazione ottenuta è ampiamente migliore di 1 ms.