SISTEM RESULTAN GAYA.pdf
12
BAB 3 SISTIM RESULTAN GAYA Sasaran bab ini adalah : Mahasiswa Mampu untuk 1. Menjelaskan konsep moment satu gaya dan menghitungnya dalam 2 dan 3 dimensi. 2. Menetapkan momen suatu gaya di suatu garis/sumbu. 3. Mendefine the moment of a couple. 4. Menghitung Resultan sistim gaya nonconcurrent/tidak bersamaan. 5. Mengindikasikan bagaimana mengurangi beban yang terdistribusi ke dalam sisitim resultan gaya pada suatu lokasi tertentu. Definisi Moment Gaya The moment of a force about a point or an axis provides a measure of the tendency of the force to cause a body to rotate about the point or axis Momen di sumbu z akibat gaya pada sumbu x tegak lurus sumbu y F x - horizontal force d y - distance from point O to force M o - moment of force about point O (M o ) z - moment of force about axis z Momen di sumbu x akibat gaya pada sumbu z tegak lurus sumbu y Fz - horizontal force dy - distance from point O to force Mo - moment of force about point O (Mo)x - moment of force about axis z
-
Upload
duongkhanh -
Category
Documents
-
view
250 -
download
1
Transcript of SISTEM RESULTAN GAYA.pdf

BAB 3 SISTIM RESULTAN GAYA
Sasaran bab ini adalah : Mahasiswa Mampu untuk
1. Menjelaskan konsep moment satu gaya dan menghitungnya dalam 2 dan 3 dimensi.
2. Menetapkan momen suatu gaya di suatu garis/sumbu. 3. Mendefine the moment of a couple. 4. Menghitung Resultan sistim gaya nonconcurrent/tidak bersamaan. 5. Mengindikasikan bagaimana mengurangi beban yang terdistribusi ke dalam
sisitim resultan gaya pada suatu lokasi tertentu. Definisi Moment Gaya The moment of a force about a point or an axis provides a measure of the tendency of the force to cause a body to rotate about the point or axis Momen di sumbu z akibat gaya pada sumbu x tegak lurus sumbu y
Fx - horizontal force dy - distance from point O to force Mo - moment of force about point O (Mo)z - moment of force about axis z Momen di sumbu x akibat gaya pada sumbu z tegak lurus sumbu y
Fz - horizontal force dy - distance from point O to force Mo - moment of force about point O (Mo)x - moment of force about axis z

NO moment
Resultant Moment of a System of Coplanar Forces
Counterclockwise is positive by scalar sign convention CONTOH : For each case, find the moment of the force about the point O
M FdMagnitude of the moment
=
Direction of the momentRight Hand Rule
ORM Fd+ = ∑
( )( )OM 100 N 2m 200 N m= = ⋅

CONTOH SOAL Determine the moment of the 800 N force about points A, B, C, and D
JAWAB
( )( )OM 50 N 0.75m 75N m= = ⋅
( )( )oOM 40lb 4 2cos30 ft 229lb ft= + = ⋅
( )( )oOM 60lb 1sin 45 ft 42.4lb ft= = ⋅
A
B
C
D
M 800 N (2.5 m) 2000 N m
M 800 N (1.5 m) 1200 N m
M 800 N (0 m) 0 N m
M 800 N (0.5 m) 400 N m
= = ⋅
= = ⋅
= = ⋅
= = ⋅
( )
( ) ( )
( ) ( )
( )
O
O
O
R
R
o o
R
ccw M Fd
M 50 N 2m 60N 0
20N 3sin30 m 40 N 3cos30 m
M 334N m 334N m cw
+ =
= − +
+ −
= − ⋅ = ⋅
∑

CROSS PRODUCT Another method of vector multiplication Read as C equals A cross B Magnitude: Direction: Right Hand Rule
1. Cross Product
Not Commutative. 2. Scalar Multiplication 3. Distributive Law:
C A B= ×r r r
C ABsin= θ
( )
A B B A
A B B A
× ≠ ×
× = − ×
r rr r
r rr r
( ) ( )( )
( )
a A B aA B
A aB
A B a
× = ×
= ×
= ×
r rr r
r r
r r
( ) ( ) ( )A B D A B A D× + = × + ×r r rr r r r

Unit Vektor Right Hand Rule
Bentuk Cartesiannya : Operasi proses :
( ) ( )ˆ ˆ ˆ ˆ ˆ ˆA B i j k i j k
ˆ ˆ ˆ ˆ ˆ ˆk j k i j iˆ ˆ ˆ( )i ( )j ( )k
x y z x y z
x y x z y x y z z x z y
y z z y x z z x x y y x
A A A B B B
AB AB A B A B AB AB
A B -AB AB AB AB A B
× = + + × + + =
+ − − + + − =
− − + −
r r
o90 sin 1
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆi i 0 i j k i k jˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆj i k j j 0 j k iˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆk i j k j i k k 0
θ = ⇒ θ =
× = × = × = −
× = − × = × =
× = × = − × =
( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
ˆ ˆ ˆ ˆ ˆ ˆA B i j k i j k
ˆ ˆ ˆ ˆ ˆ ˆi i i j i k
ˆ ˆ ˆ ˆ ˆ ˆj i j j j k
ˆ ˆ ˆ ˆ ˆ ˆk i k j k k
x y z x y z
x x x y x z
y x y y y z
z x z y z z
A A A B B B
A B A B A B
A B A B A B
A B A B A B
× = + + × + + =
× + × + × +
× + × + × +
× + × + ×
r r
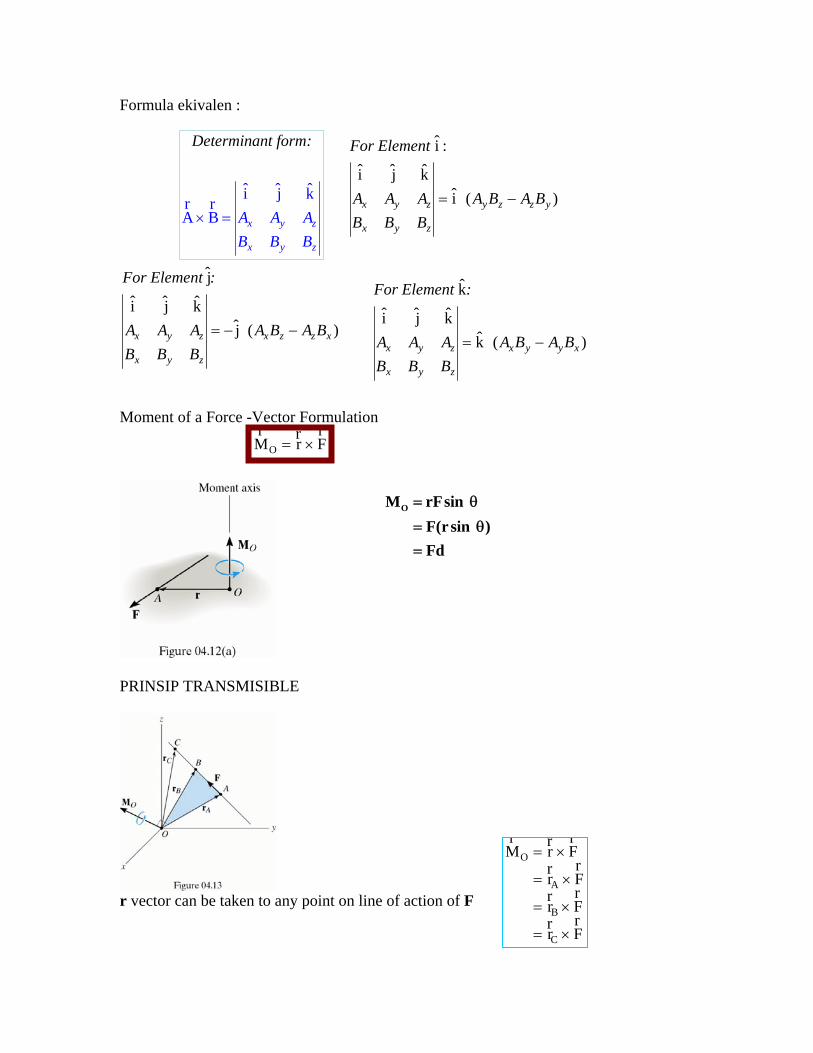
Formula ekivalen : Moment of a Force -Vector Formulation
PRINSIP TRANSMISIBLE
r vector can be taken to any point on line of action of F
ˆ ˆ ˆi j kA B x y z
x y z
Determin
A A
ant fo
B B
m
A
r
B
:
× =r r
i :ˆ ˆ ˆi j k
i ( )x y z y z z y
x y z
For Element
A A A A B A BB B B
= −
jˆ ˆ ˆi j k
j ( )x y z x z z x
x y z
For Element :
A A A A B A BB B B
= − −
kˆ ˆ ˆi j k
k ( )x y z x y y x
x y z
For Element :
A A A A B A BB B B
= −
OM r F= ×r rr
OM rFsinF(r sin )Fd
= θ
= θ=
O
A
B
C
M r F
r F
r F
r F
= ×
= ×
= ×
= ×
r rrrrrrrr

Bentuk Cartesiannya dan Formulasi vektor cartesian : MOMENT
RESULTAN MOMEN DARI SUATU SISTIM GAYA
Contoh soal : Cari moment di titik A
1. Find vectors
O
ˆ ˆ ˆi j kM r F x y z
x y z
r r rF F F
= × =r rr O
ˆM ( )iˆ( ) jˆ( )k
y z z y
x z z x
x y y x
r F -r F
r F r F
r F r F
=
− −
+ −
r
( )( ) ( ) ( )
OR
1 1 2 2 3 3
M r F
r F r F r F
= ×
= × + × + ×
∑r rr
r r rr r r
A Br r and r r

2. Force vector is 60 N times a unit vector in direction of
3. Moment
Vektor posisi : Vektor Gaya : Vektor momen
CBu
A A A BM r F M r For = × = ×r r r rr r
B BA
C CA
CB B C
CB
CB
ˆ ˆ ˆr r (1i 3j 2k)mˆ ˆ ˆr r (3i 4 j 0k)m
r r rˆ ˆ ˆr (1 3)i (3 4) j (2 0)k
ˆ ˆ ˆr 2i 1j 2k
= = + +
= = + += −
= − + − + −
= − − +
r r
r rr r r
CB
CBCB 2 2 2
CB
CB
CB
ˆ ˆ ˆr 2i 1j 2kˆ ˆ ˆr 2i 1j 2kˆ ˆ ˆu 2i 1j 2k
r ( 2) ( 1) (2)2 1 2ˆ ˆ ˆu i j k3 3 3
ˆF (60 N) uˆ ˆ ˆF ( 40i 20 j 40k) N
= − − +
− − += − − + = =
− + − +
= − − +
=
= − − +
r
r
r
B
C
A B
ˆ ˆ ˆr (1i 3j 2k)mˆ ˆ ˆr (3i 4 j 0k)m
ˆ ˆ ˆF ( 40i 20 j 40k) Nˆ ˆ ˆ ˆ ˆ ˆM r F (1i 3j 2k)m ( 40i 20 j 40k) N
= + +
= + +
= − − +
= × = + + × − − +
r
rr
r rr

Contoh soal : Determine the resultant moment at O and the coordinate direction angles for the moment.
Vektor posisi (lihat gambar 04.17.b) Vektor gayanya : Vektor momennya :
( )
A B
A
2 2 2A
ˆ ˆ ˆ ˆ ˆ ˆM r F (1i 3j 2k)m ( 40i 20 j 40k) Nˆ ˆ ˆi j k
M 1 3 2-40 -20 40
ˆ ˆ ˆ[3(40) 2( 20)]i [(1(40) 2( 40)]j [1( 20) 3( 40)]kˆ ˆ ˆ160i 120 j 100k N m
M (160) ( 120) (100) 224 N m
= × = + + × − − +
=
= − − − − − + − − −
= − + ⋅
= + − + = ⋅
r rr
A OA
B OB
ˆr r (5j)ftˆ ˆ ˆr r (4i 5j 2k)ft
= =
= = + −
r r
r r
1
2
3
ˆ ˆ ˆF ( 60i 40 j 20k) lbˆF (50 j) lbˆ ˆ ˆF (80i 40 j 30k) lb
= − + +
=
= + −
r
r
r
( ) ( ) ( ) ( )OR A 1 A 2 B 3M r F r F r F r F
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆi j k i j k i j k0 5 0 0 5 0 4 5 2
-60 40 20 0 50 0 80 40 30
= × = × + × + ×
= + + −−
∑r r r r rr r r r

Sudut Arahnya : Principle of Moments The moment of a force about a point is equal to the sum of the moments of the force’s components about the point.
A
F1
F2
F
( ) ( )
( )
OR
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆi j k i j k i j kM 0 5 0 0 5 0 4 5 2
-60 40 20 0 50 0 80 40 30
ˆ ˆ ˆ[5(20) 40(0)]i [0]j [0(40) 60(5)]kˆ ˆ ˆ[0]i [0]j [0]k
ˆ ˆ ˆ[5( 30) 40( 2)]i [4 30 80 2 ]j [4(40) 80(5)]kˆ ˆ ˆ30i 40 j 60k lb ft
= + + −−
= − − + −
+ − +
+ − − − − − − + −
= − + ⋅
r
( )( ) ( ) ( )
( )
O
O
O
O
O
R
2 2 2R
R
R
R
ˆ ˆ ˆM 30i 40 j 60k lb ft
M 30 40 60 lb ft
M 78.10 lb ft
ˆ ˆ ˆ30i 40 j 60k lb ftMu
M 78.10 lb fˆ ˆ ˆ0.3841i 0.5121j 0.7682k
= − + ⋅
= + − + ⋅
= ⋅
− + ⋅= =
⋅
= − +
r
r
o
o
o
ˆ ˆ ˆu 0.3841i 0.5121j 0.7682k
cos 0.3841 67.4
cos 0.5121 121
cos 0.7682 39.8
= − +
α = α =
β = − β =
γ = γ =

Contoh Soal : Determine the moment of the force about A
Moment of a Force About a Specified Axis
1. Sometimes need the component of a moment about a particular axis 2. Scalar analysis: ma=Fda where da is the ⊥ or shortest distance from the force line
of action to the axis of interest 3. Vector analysis: ma= ua • (r x F) 4. This called the triple scalar product
( )( )
( )
o
A
A
CB d 100cos45 70.71mm 0.07071m
M Fd 200N 0.07071m 14.1N m
ˆM 14.1k N m
= = = =
= = = ⋅
= ⋅r

1. Ma is a scalar with positive or negative sign. 2. Positive sign indicates the sense is the same as unit vector ua. 3. Negative sign indicates the sense is opposite the sense of unit vector ua.
O
F, Oa 'a '
M F O a 'a '
In general case, to find
moment of at point ,about axis , we project
of about onto .
r
r r
( )
O A
a O A A A
a
M r F
ˆ ˆM u u r F
x y za a a
x y z
x y z
= Then
M =
u u u
M = r r rF F F
×
⋅ = ⋅ ×
r rr
r rrx y z
x y z
a
ˆ ˆ ˆi j kˆ ˆ ˆ( i j k) r r r
F F Fx y z
x y z
a a a a
a a a
x y z
x y z
M u u u
u u u
M = r r rF F F
= + + ⋅
x y za a a
x y z
x y z
u u u
x,y,z components of unit vectordirected along the axis.r r r
x,y,z components of position vectordirected from point O on the axis to any point along the line of action of the force.F F F
⇒
⇒
⇒
x,y,z components of the force vector