Simulation of fault scenarios - b-dig.iie.org.mx
6
1 New Possibilities in Field Testing of Distributed Protection Systems Boris Bastigkeit, Christopher Pritchard, Thomas Hensler, OMICRON electronics GmbH Abstract Due to the increasing complexity of our electrical power systems, the need for highly selective protection is increasingly being fulfilled by the use of teleprotection schemes or line differential protection. To test such protection systems properly, a distributed end-to-end test with synchronized injection is required. The first challenge for such a test is the correct calculation of the voltages and currents to inject at both (or even multiple) ends. Therefore, a simulation of the fault scenario based on the power system network, is needed which can deliver all of the required values. For the execution of an actual fault scenario (shot), a single software application which controls all test devices on both (or multiple) ends from a single PC, is much more convenient and productive than separate software applications, which have to be operated manually for synchronized injection. Controlling a remote test device is now possible using an existing Internet connection at each end of the test. Keywords: Distributed protection, end-to-end testing, teleprotection, line differential protection, GPS synchronization, PTP Introduction Our electrical power systems have been undergoing major changes over the last few years. Renewable energy sources are used to feed into the grid at many points and electricity is consumed far away from where it was originally generated. Therefore, our electrical power grids are becoming ever more complex and are operated almost at their limits. On the other hand, computer and communication technology has advanced considerably and allows cost effective solutions for a wide variety of technical problems. For power system protection, modern protection relays using communications technology, provide the most efficient and selective solution. Line protection using teleprotection schemes, such as POTT (Permissive Overreach Transfer Trip), are already widely used to allow fast tripping for any fault up to 100% of the line length. Differential protection is even more effective if all ends involved can communicate their current values instantaneously, which is now possible, even for long distance power lines, using fiber optic connections. Commissioning and testing a distributed protection system should involve the whole system, since the cause of a malfunction can be on the communications channel between the line ends. Effective testing of such a protection system requires the distributed injection of test voltages and currents. It also uses the distributed recording of the reaction of the system under test, in a time- synchronized way. Synchronizing multiple test devices is possible, even over long distances using high precision absolute time sources, such as GPS. However, conducting such a test has always been a challenge, requiring considerable effort and can be error prone, since all ends involved have to be coordinated carefully. Software applications, using modern communications capabilities for the test execution, can make end-to-end testing much easier and open up the possibility to apply it more frequently and reliably. Simulation of fault scenarios Protection testing always requires the simulation of a fault scenario, which is applied to stress the protection relay and verify the correct reaction. From the fault simulation, the voltages and currents, which are injected to the relay under test, are calculated. For a simple fault simulation this can be as straight forward as calculating voltages and currents from a certain impedance value, which is possible manually (using a calculator) or from the available functionality of the test device. For an end-to-end test, however, the fault simulation has to simultaneously provide the quantities to inject for all ends. A manual calculation, or a separate calculation for each end, is rather cumbersome and can easily result in values which do not fit together. Therefore, an integrated simulation of a fault scenario based on the simulation of the power system network is much more reliable and for more complex topologies may provide the only practical solution. For example, for a topology consisting of a 3-terminal line such as in Fig. 1, the correct calculation of the prefault load currents and the fault quantities in magnitude and phase can be easily achieved with a software application.
Transcript of Simulation of fault scenarios - b-dig.iie.org.mx

1
New Possibilities in Field Testing of Distributed Protection Systems
Boris Bastigkeit, Christopher Pritchard, Thomas Hensler, OMICRON electronics GmbH
Abstract
Due to the increasing complexity of our electrical power systems, the need for highly selective protection is increasingly being fulfilled by the use of teleprotection schemes or line differential protection. To test such protection systems properly, a distributed end-to-end test with synchronized injection is required. The first challenge for such a test is the correct calculation of the voltages and currents to inject at both (or even multiple) ends. Therefore, a simulation of the fault scenario based on the power system network, is needed which can deliver all of the required values. For the execution of an actual fault scenario (shot), a single software application which controls all test devices on both (or multiple) ends from a single PC, is much more convenient and productive than separate software applications, which have to be operated manually for synchronized injection. Controlling a remote test device is now possible using an existing Internet connection at each end of the test.
Keywords: Distributed protection, end-to-end testing, teleprotection, line differential protection, GPS synchronization, PTP
Introduction
Our electrical power systems have been undergoing major changes over the last few years. Renewable energy sources are used to feed into the grid at many points and electricity is consumed far away from where it was originally generated. Therefore, our electrical power grids are becoming ever more complex and are operated almost at their limits. On the other hand, computer and communication technology has advanced considerably and allows cost effective solutions for a wide variety of technical problems.
For power system protection, modern protection relays using communications technology, provide the most efficient and selective solution. Line protection using teleprotection schemes, such as POTT (Permissive Overreach Transfer Trip), are already widely used to allow fast tripping for any fault up to 100% of the line length. Differential protection is even more effective if all ends involved can communicate their current values instantaneously, which is now possible, even for long distance power lines, using fiber optic connections.
Commissioning and testing a distributed protection system should involve the whole system, since the
cause of a malfunction can be on the communications channel between the line ends. Effective testing of such a protection system requires the distributed injection of test voltages and currents. It also uses the distributed recording of the reaction of the system under test, in a time-synchronized way.
Synchronizing multiple test devices is possible, even over long distances using high precision absolute time sources, such as GPS. However, conducting such a test has always been a challenge, requiring considerable effort and can be error prone, since all ends involved have to be coordinated carefully. Software applications, using modern communications capabilities for the test execution, can make end-to-end testing much easier and open up the possibility to apply it more frequently and reliably.
Simulation of fault scenarios
Protection testing always requires the simulation of a fault scenario, which is applied to stress the protection relay and verify the correct reaction. From the fault simulation, the voltages and currents, which are injected to the relay under test, are calculated. For a simple fault simulation this can be as straight forward as calculating voltages and currents from a certain impedance value, which is possible manually (using a calculator) or from the available functionality of the test device.
For an end-to-end test, however, the fault simulation has to simultaneously provide the quantities to inject for all ends. A manual calculation, or a separate calculation for each end, is rather cumbersome and can easily result in values which do not fit together.
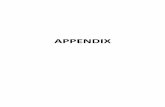
Therefore, an integrated simulation of a fault scenario based on the simulation of the power system network is much more reliable and for more complex topologies may provide the only practical solution. For example, for a topology consisting of a 3-terminal line such as in Fig. 1, the correct calculation of the prefault load currents and the fault quantities in magnitude and phase can be easily achieved with a software application.

2
Fig. 1 Topology of a 3-terminal line
The software can provide the correct phasors of the fault quantities for a L1N fault on the second line segment, as shown in Fig. 1, and for all three terminals at once, as shown in Fig. 2.
Fig. 2 Voltage and current phasors for the 3 terminals
A software application should allow the simulation of fault scenarios for all the different topologies of the protected power system, such as single lines, double lines, 3-terminal lines, power transformers, different busbar topologies, etc. Therefore, the protection engineer can have the possibility to define the topology easily using an interactive graphical editor to draw it as a single line diagram. Additionally, all the electrical parameters of the equipment involved, such as the lines, CTs, VTs, etc., have to be defined. The protection engineer can then interactively design fault scenarios, with different infeed and load conditions, different fault types and fault locations. The software can then instantaneously calculate the fault quantities for all ends.
If this information is already available within the software, an even more realistic dynamic simulation of the fault scenario is possible, based on a transient network simulation, without any additional complexity. The software provides the correct transient signals for the power system topology from Fig. 1, with prefault load currents, correct fault inception and decaying DC components for all three ends, as in Fig. 3.
Fig. 3 Transient signals for the 3 terminals
Synchronized injection for multiple ends
For highly selective differential protection, the precise time synchronized injection of the fault quantities is essential, since any inaccuracy can result in a differential current, which can trip the relay mistakenly. Since the fault scenarios are not injected for very long (a maximum of a couple of seconds), the precise synchronization of the start of the injection is required to ensure the precision of the phase angles for all signals. With modern test devices, this is achieved using high quality quartz oscillators for the signal generation.
To synchronize the start of the event and to provide exact time stamps for the recorded reaction of the protection relays, a precise absolute time source using GPS is the easiest solution. Therefore, all test devices need to obtain the same absolute time from a GPS receiver positioned under open sky, so that a sufficient number of satellite signals can be received for the required time precision.
The distance between the GPS antenna and the test device can be quite considerable, especially in substations or power plants, which are located in big buildings or even underground; such as hydroelectric power plants situated in caverns in the mountains. In these cases, using a computer network connection between the GPS device and the test device using PTP (Precision Time Protocol) according to the IEEE 1588 standard is the best solution. The set-up of the test device with the GPS time source is as simple as connecting an Ethernet cable between the GPS device and the test device as depicted in Fig. 4.

3
Fig. 4 Set-up of a test device with a PTP time source
The Ethernet connection from the GPS device to the test set can be extended with fiber optic connections up to a couple of hundred meters and the PTP protocol compensates for any transmission delays. In future it will even be possible for the utilities to provide the distribution of a PTP time source within a communications network throughout the whole substation, so that multiple test devices can use it simultaneously.
The synchronized injection and precise recording of the protection relay’s reaction (e.g. trip commands) or any other binary event in the substation is then possible with minimal effort and complexity.
For the execution of a fault scenario with a distributed set-up of the test devices, the best and most flexible way is for the protection engineer to directly use the software application already in use to calculate the injected signals, to also control all of the distributed test devices from a single application. This is possible via a network connection to all test devices.
From this single software application, the protection engineer can easily design and immediately inject different fault scenarios, so that much more effective testing of the protection system is possible. The central software application can control the start of the injection (shot) without the need to coordinate with other personnel at the other ends. Previously it was necessary to use a set-up comprising separate PCs and software applications on each end. This led to an error prone procedure to coordinate every single shot, which was often via a phone conversation resulting in an agreement to start the injection at the next full minute. Conducting an end-to-end shot is now almost as simple as a conventional single-end test.
Another major advantage of a single central application is that the recorded results of the tests are immediately available for the user and there is no additional error prone procedure necessary to bring them together from each end for a common evaluation and assessment. For example, within a test for a POTT (Permissive Overreach Transfer
Trip) scheme on an end-to-end test for a transmission line, the protection engineer can verify the delay time of the teleprotection signals (delay time between sending signal Tx recorded on the first end, and the receiving signal Rx recorded on the other end) immediately after executing the shot as shown Fig. 5.
Fig. 5 Delay time of teleprotection signals
Controlling remote test devices over a network connection
For a single application running on a single PC capable of controlling remote test devices, a network connection to the remote end is necessary. Any existing network connection available in the substations could be used. However, the set-up of such a network connection to control a remote test device can be quite complex and sometimes poses a major challenge for the protection engineer. On the other hand, even if a network connection is installed within the substation, it may not be available for testing purposes due to security risks or other reasons.
A much easier solution is to re-use network connectivity available for mobile computers which are nowadays available in most locations. Internet access, such as that available via UMTS, is possible almost everywhere. It is either directly built into the mobile computer or through a mobile hotspot provided by a modern Smartphone. The application software for protection testing can now leverage the Internet connectivity of the PC it is running on. Therefore, the application takes care of any network issues and just uses outgoing HTTP traffic, which is used to browse the Internet, so that no firewalls or routers interfere with the connection to the remote end.
At the remote end, another PC with Internet access is used for single-end tests which are also being carried out. On this remote PC, the protection engineer or technician just has to start a small proxy application, which takes care of the network issues

4
and announces the test device to the controlling software application at the other end. For security reasons a simple session code or additional password has to be exchanged between the two ends and is used by both the proxy application and the controlling software (similar to software used to control a remote PC via the Internet, such as TeamViewer). Logically the set-up can be depicted as in Fig. 6.
Fig. 6 Scheme of end-to-end test over the cloud
The test devices are connected directly to the PCs at either end which are also being used for single-end testing. It is also possible for the test devices to be connected to the PC via means such as USB, which do not provide network connectivity on their own.
The advantage of this set-up is that it is possible for almost any end user to establish connection without the need to deal with complex network settings and issues. Additionally, the Internet connection of the PCs can, in parallel, be used for voice or even video connection to the other ends (e.g. via applications such as Skype or TeamViewer) and therefore replace a phone connection while conducting the end-to-end test.
Iterative closed-loop simulation
Protection relays operating in a power system control circuit breakers (CB) to isolate faults via their trip and reclose commands. During testing they are normally disconnected from the CBs and the commands are recorded by the test devices. The fault scenario should then adapt to the relay's reactions and simulate the events caused by the trip and close commands by adjusting the injected quantities.
For a single-end test and a simple fault simulation, an instantaneous reaction (with some breaker delay) of the injected quantities is possible. Although with a more complex transient network simulation, a real time transient simulation (the so called closed-loop simulation) is necessary, which is extremely demanding of calculation resources and, therefore, only available in rather expensive and complex solutions, which are impractical for usage in the field.
For a distributed end-to-end test, an instantaneous reaction to the CB commands, within the real breaker delay times, is not possible because of the communication delays due to the network latency to the remote test device. For example, a trip command at one end also has an effect on the injected quantities at all the other ends, and this information has to be distributed to the central application in order to recalculate the transients and transfer the samples back to all the remote ends, which is not possible within the required delay time.
However, an iterative approach is possible, which can mimic the behavior of a closed-loop simulation with multiple repetitions. Therefore, a fault scenario is simulated repeatedly taking into account the reactions of the distributed relays under test, recorded during a previous execution of the fault scenario. If we assume that the relays behave deterministically, and the same scenario is repeated (the software allows for some tolerance in the timing of the events); when the whole procedure is iterated until no more relay reactions are recorded, the final execution of the fault scenario is exactly the same as if a closed-loop simulation had been used.
For example, the following figures show some of the iterations made for an end-to-end line differential relay with auto-reclosing enabled. For the first iteration, the simulation cannot take into account that both relays trip the breakers in zone 1, which is shown in Fig. 7.
Fig. 7 First shot
For the next iteration, the simulation considers the opening of the breakers (with set breaker delay times), so that the fault is cleared. Again, the software cannot predict that the relays will reclose the breakers after about 500ms, which can be seen in Fig. 8.

5
Fig. 8 Iterative shot with trip commands applied
The whole procedure is repeated by the software automatically until no more new reactions of the relays are seen. The final fault scenario with two (unsuccessful) reclosing cycles can be seen in Fig. 9 and is identical to a closed-loop simulation.
Fig. 9 Final shot with all trip and close commands
applied
Iterative closed-loop simulation is possible from within the single central software application which can control multiple remote test devices via a network connection and can, therefore, automatically repeat multiple shots without the need for any manual user intervention. With this approach, even complex fault scenarios can be simulated, where the software automatically adapts to the reaction of the relays under test and without the need for complex sequence of events to be designed beforehand. For the evaluation and assessment of the relay's behavior, all possibilities are available, as if the test were a single-end closed-loop simulation, e.g. the times between the slopes of the trip and close commands can be measured and evaluated.
Summary
Leveraging network communication technology and a modern software application opens a lot of new possibilities in the field testing of distributed protection systems.
• The protection engineer can simulate fault scenarios from a single integrated software application and calculate the injected quantities for all ends simultaneously.
• GPS time sources capable of providing synchronized injection via a network connection with PTP (Precision Time Protocol) need just to be plugged into the test devices to bridge even long distances into the substations.
• A single software application can control multiple test devices via a network connection, so that executing a shot is as simple as for a single-end test and the results for all ends are available immediately.
• Mobile computers with Internet access in the field can be used to control remote test devices without complex network set-up.
• Iterative closed- loop simulation can mimic the behavior of a real closed-loop simulation even for a distributed end-to-end test.
Overall the new possibilities make end-to-end testing a lot easier to conduct. Most of the error prone procedures and pitfalls necessary with previous solutions can be avoided. This allows the application of distributed end-to-end tests for every relevant commissioning and testing task, so that all the critical parts of the protection system are verified effectively.
Literature
[1] Steinhauser, Fred: Network Simulation on the PC – New Options for Protection Testing; International Protection Testing Symposium (IPTS) 2004, Amsterdam, Netherlands
[2] Mortensen, Jens Ulrik; Bastigkeit, Boris: New possibilities for testing of line protection relays, Field test report at SEAS-NVE Denmark; International Protection Testing Symposium (IPTS) 2008, Feldkirch, Austria
[3] Bastigkeit, Boris: Testing Teleprotection Schemes by Transient Network Simulation; International Protection Testing Symposium (IPTS) 2009, Vienna, Austria
[4] Riesch, Christian: Die Zukunft der Zeitsynchronisation im Smart Grid; Anwendungsberichte der OMICRON Anwendertagung 2012, Essen, Germany

6
Trademarks:
• TeamViewer® is a registered trademark of TeamViewer GmbH
• SkypeTM is a registered trademark of Microsoft Corp.
About the Authors
Dipl.-Ing. Boris Bastigkeit (IEEE, OVE) was born in 1969 in Kempton Park / South Africa. He received his diploma (Master’s Degree) in Electrical Engineering at the Technical University of Graz (Austria) in 1998. He joined OMICRON electronics in Austria in 1997 where he held various
positions in development and sales before he was appointed to his current position as head of product management in the field of testing solutions for protection and measurement systems. He is convener of the Austrian TC 95 and a member of the working group IEC TC 95 MT4.
Dipl.-Ing. (FH) Christopher Pritchard was born in 1982 in Dortmund / Germany. He received his diploma in Electrical Engineering at the University of Applied Science in Dortmund in 2006. He joined OMICRON electronics in 2006 where he worked in application software
development in the field of testing solutions for protection and measurement systems.
Dipl.-Ing. Thomas Hensler was born in 1968 in Feldkirch / Austria. He received his diploma (Master’s Degree) in Computer Science at the Technical University of Vienna in 1995. He joined OMICRON electronics in 1995 where he worked in application software
development in the field of testing solutions for protection and measurement systems. Additionally he is responsible for product management for application software for protection testing.