
CAE 「数値流体力学」輪講¬¬7...「数値流体力学」輪講に関して 2013/03/23 「数値流体力学」輪講 第7回 2 目的 数値流体力学の知識(特に理論ベース)を深め、

SIMPLE による流れの数値
Suhas V. Patanker
Numerical Heat Transfer and Fluid Flow
1980 Hemisphere Publishing Corporation
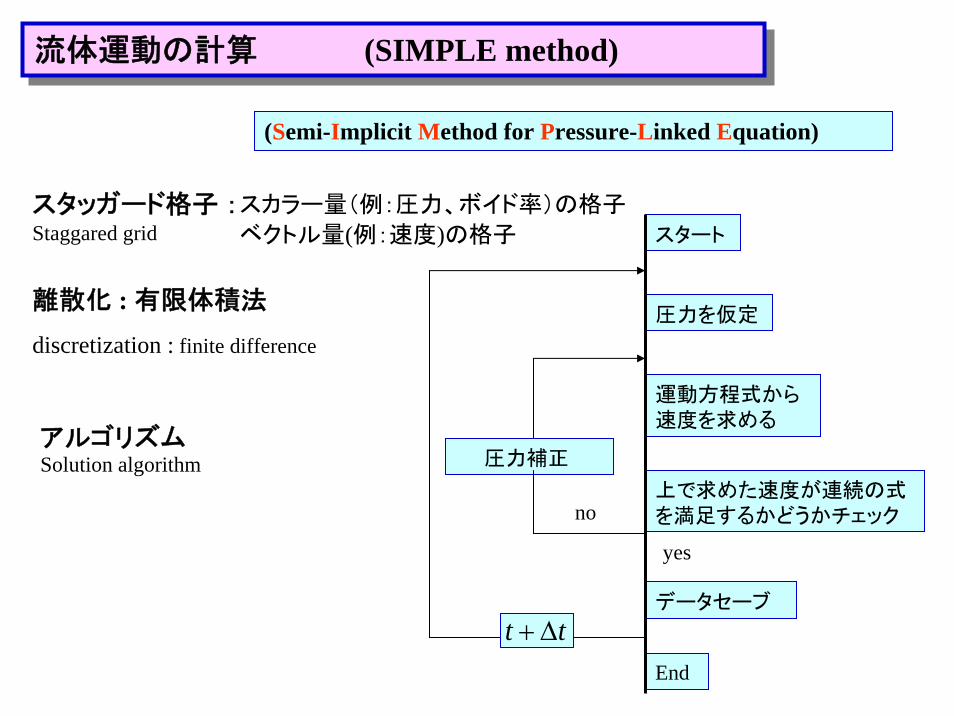
流体運動の計算 (SIMPLE method)流体運動の計算 (SIMPLE method)
(Semi-Implicit Method for Pressure-Linked Equation)
スタッガード格子 :Staggared grid
スカラー量(例:圧力、ボイド率)の格子
ベクトル量(例:速度)の格子
離散化 : 有限体積法
discretization : finite difference
アルゴリズムSolution algorithm
スタート
圧力を仮定
運動方程式から速度を求める
上で求めた速度が連続の式を満足するかどうかチェック
データセーブ
End
yes
tt Δ+
圧力補正
no

連続の式 Continuity equation連続の式 Continuity equation
( ) ( ) 0=∂∂
+∂∂
+∂∂ w
zv
ytεεε
zxyx →→ 21
0m
const.
=→=
&
εαρ
c
c
( ) ( ) mnuxt cccc &−=
∂∂
+∂∂ αραρ
1次元 one dimension
( ) ( ) mnuxt icc
icc &−=
∂∂
+∂∂ ραρα
多次元 multi-dimensional
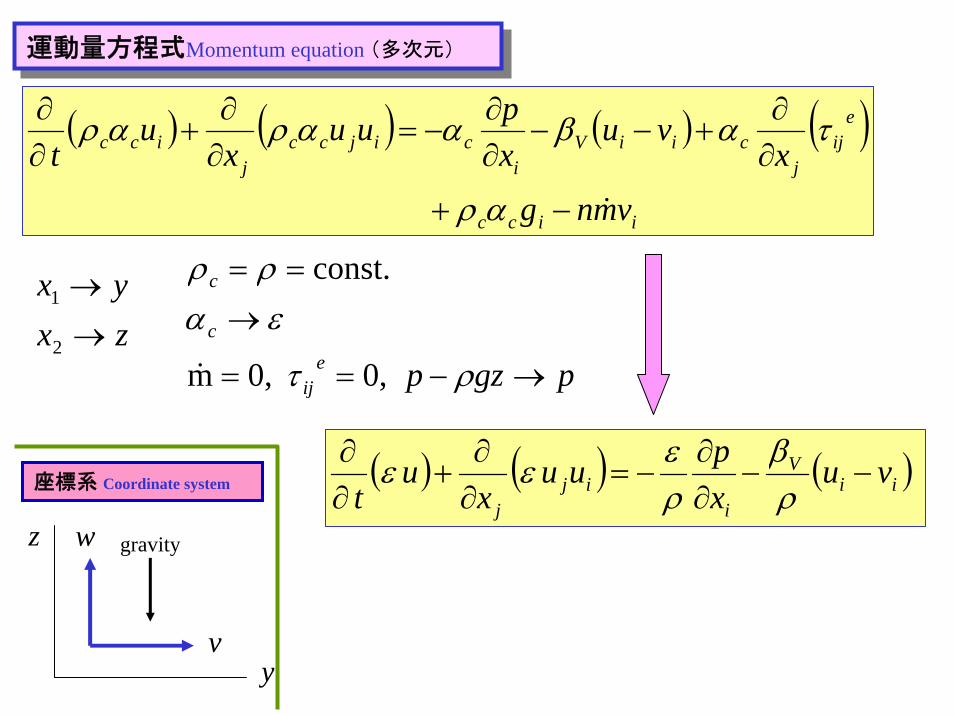
座標系 Coordinate system
y
z
v
w 重力gravity
CV内の質量の単位時間当たりの増加率
=流入する質量と流出する質量の差
粒子から流体として放出される質量
+x
u
1 2
検査面 CVControl volume
( ) ( ) ( ) ( )iicc
eij
jciiV
icijcc
jicc
vmng
xvu
xpuu
xu
t&−+
∂∂
+−−∂∂
−=∂∂
+∂∂
αρ
ταβααραρ
pgzpeij
c
c
→−==
→==
ρτ
εαρρ
,0 0,m
const.
&zxyx
→→
2
1
( ) ( ) ( ) iiV
iij
j
vuxpuu
xu
t−−
∂∂
−=∂∂
+∂∂
ρβ
ρεεε座標系 Coordinate system
y
z
v
w gravity
運動量方程式Momentum equation (多次元)運動量方程式Momentum equation (多次元)

( ) ( ) ( ) iiV
iij
j
vuxpuu
xu
t−−
∂∂
−=∂∂
+∂∂
ρβ
ρεεε座標系 Coordinate system
y
z
v
w gravity
( ) iiiV Kvu →−− β
( ) ( ) ( )ρρ
εεεε yKypvw
zvv
yv
t+
∂∂
−=∂∂
+∂∂
+∂∂ direction: −y
( ) ( ) ( )ρρ
εεεε zKzpww
zvw
yw
t+
∂∂
−=∂∂
+∂∂
+∂∂
direction: −z
運動方程式 Equation of motion運動方程式 Equation of motion
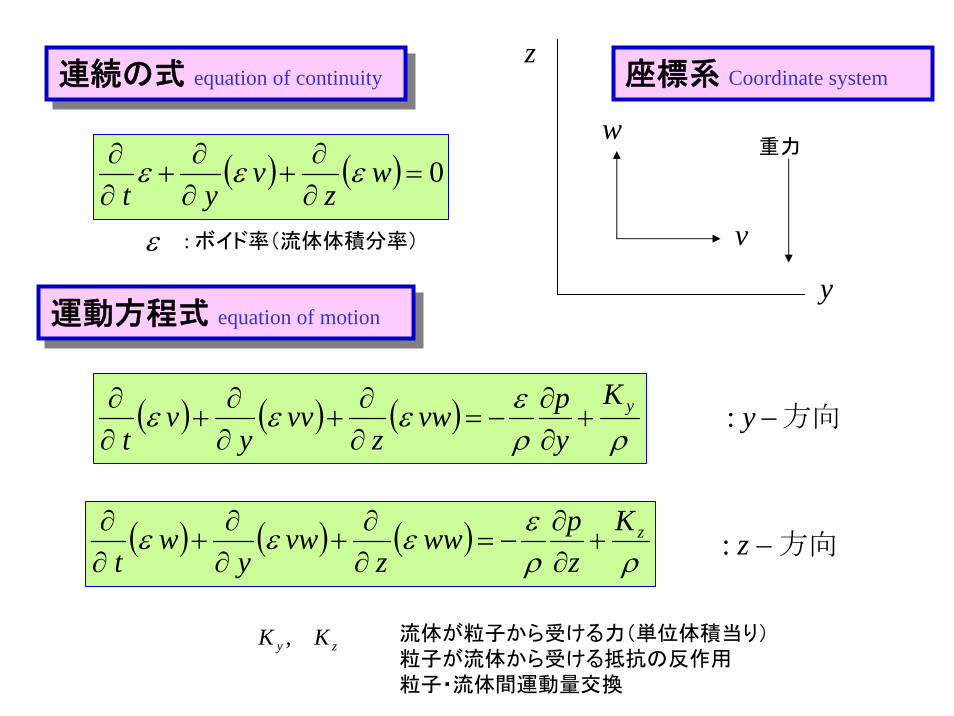
連続の式 equation of continuity連続の式 equation of continuity
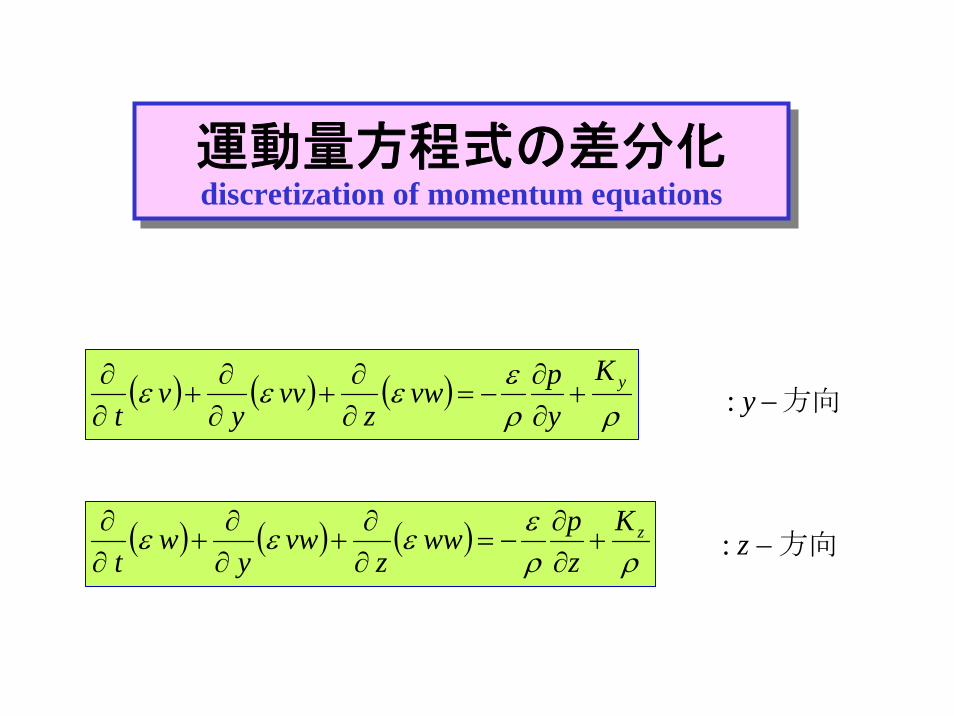
運動方程式 equation of motion運動方程式 equation of motion
( ) ( ) 0=∂∂
+∂∂
+∂∂ w
zv
ytεεε
( ) ( ) ( )ρρ
εεεε yKypvw
zvv
yv
t+
∂∂
−=∂∂
+∂∂
+∂∂
( ) ( ) ( )ρρ
εεεε zKzpww
zvw
yw
t+
∂∂
−=∂∂
+∂∂
+∂∂
座標系 Coordinate system
y
z
v
w重力
方向−y:
方向−z:
zy KK , 流体が粒子から受ける力(単位体積当り)粒子が流体から受ける抵抗の反作用粒子・流体間運動量交換
ε : ボイド率(流体体積分率)

j1,i −
1j1,i −+1ji, −1j1,i −−
j1,i +ji,
1j1,i ++1ji, +1j1,i +−
j1,i +
1j1,i ++1ji, +
ji,
1j1,i +−
j1,i −
1j1,i −− 1ji, − 1j1,i −+
1ji, − 1j1,i −+
j1,i +ji,
1j1,i ++1ji, +1j1,i +−
j1,i −
1j1,i −−
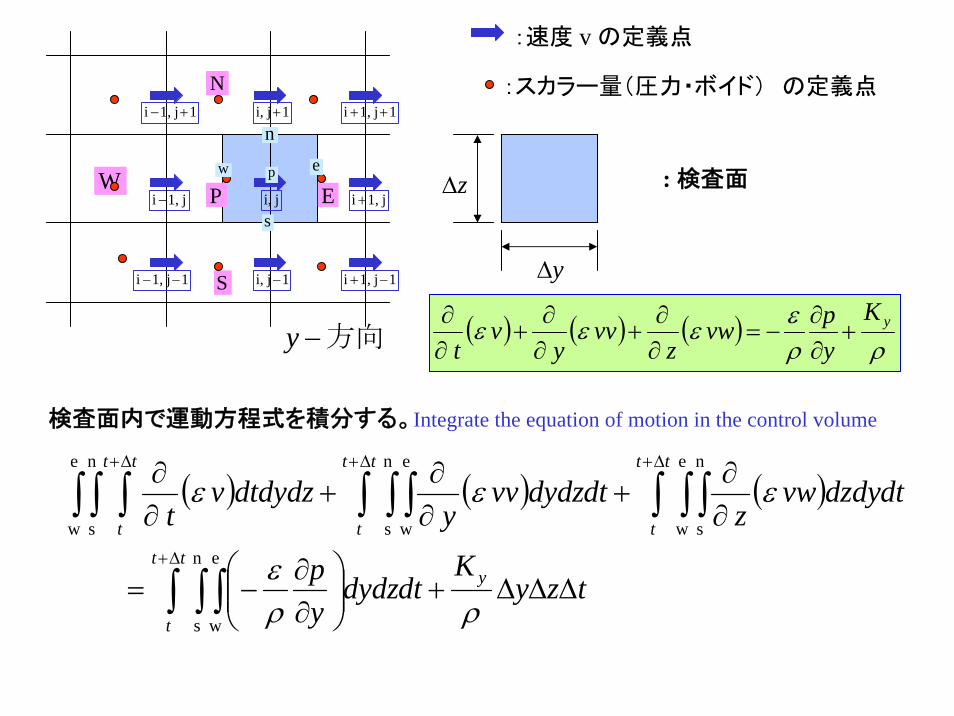
:速度 w の定義点
スタッガード格子staggered gridスタッガード格子staggered grid
P E
N
W
S
:スカラー量(圧力・ボイド)の定義点
:速度 v の定義点
( ) ( ) ( )ρρ
εεεε yKypvw
zvv
yv
t+
∂∂
−=∂∂
+∂∂
+∂∂
方向−y:
( ) ( ) ( )ρρ
εεεε zKzpww
zvw
yw
t+
∂∂
−=∂∂
+∂∂
+∂∂
方向−z:
運動量方程式の差分化discretization of momentum equations運動量方程式の差分化discretization of momentum equations
( ) ( ) ( )ρρ
εεεε yKypvw
zvv
yv
t+
∂∂
−=∂∂
+∂∂
+∂∂
方向−y
( ) ( ) ( )
tzyK
dtdydzyp
dtdzdyvwz
dtdydzvvy
dtdydzvt
ytt
t
tt
t
tt
t
tt
t
ΔΔΔ+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−=
∂∂
+∂∂
+∂∂
∫ ∫ ∫
∫ ∫ ∫∫ ∫ ∫∫ ∫ ∫Δ+
Δ+Δ+Δ+
ρρε
εεε
n
s
e
w
e
w
n
s
n
s
e
w
e
w
n
s
P E
N
W
S
j1,i −
1ji, − 1j1,i −+
j1,i +ji,
1j1,i ++1ji, +1j1,i +−
1j1,i −−
: 検査面
yΔ
zΔ
検査面内で運動方程式を積分する。Integrate the equation of motion in the control volume
:速度 v の定義点
:スカラー量(圧力・ボイド) の定義点
w
s
n
p e
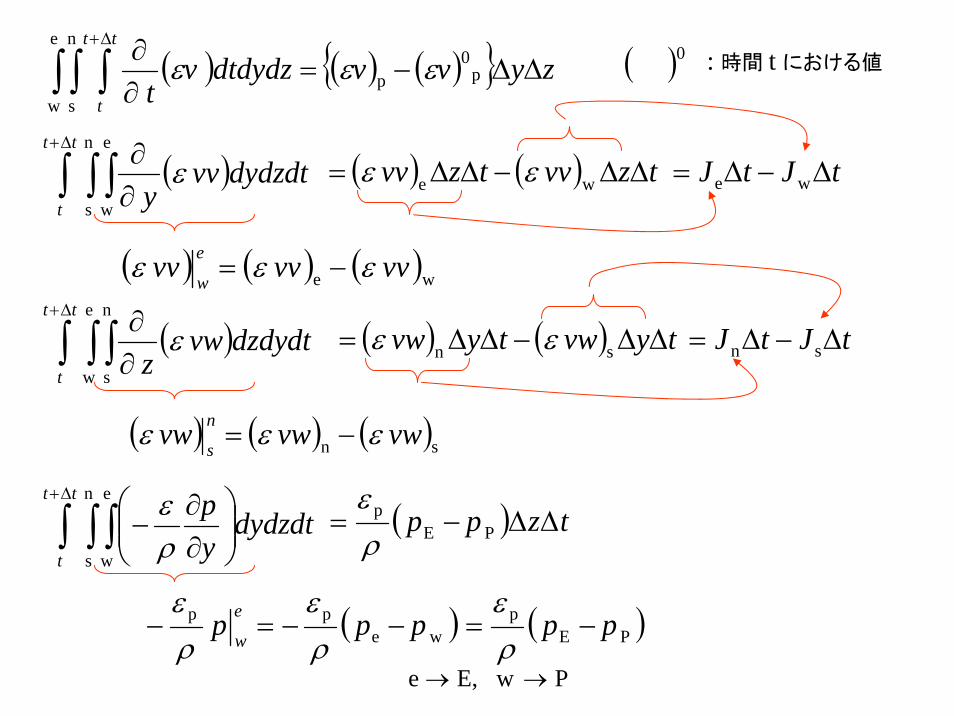
( ) ( ) ( ){ } zyvvdtdydzvt
tt
t
ΔΔ−=∂∂
∫ ∫ ∫Δ+
p0
p
e
w
n
s
εεε ( )0 : 時間 t における値
( ) dtdydzvvy
tt
t∫ ∫ ∫Δ+
∂∂n
s
e
w
ε ( ) ( ) tzvvtzvv ΔΔ−ΔΔ= we εε
( ) dtdzdyvwz
tt
t∫ ∫ ∫Δ+
∂∂e
w
n
s
ε
dtdydzyptt
t∫ ∫ ∫Δ+
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−n
s
e
w ρε
P wE,e →→
( )PEp pp −=ρε
( ) tzpp ΔΔ−= PEp
ρε
tJtJ Δ−Δ= we
( ) ( ) tyvwtyvw ΔΔ−ΔΔ= sn εε tJtJ Δ−Δ= sn
( ) ( ) ( )we vvvvvv e
wεεε −=
( ) ( ) ( )sn vwvwvw n
sεεε −=
( )wepp ppp e
w−−=−
ρε
ρε

( ) ( ){ } ( ) zyK
zppJJJJzyt
vv y ΔΔ+Δ−−=−+−+ΔΔΔ
−
ρρεεε
PEp
snwe
p0
p
連続の式を同じ検査面において積分する。Integrate the equation of continuity in the same control volume
( ) ( ) 0=∂∂
+∂∂
+∂∂ w
zv
ytεεε
)1(
direction−y
P E
N
W
S
j1,i −
1ji, − 1j1,i −+
j1,i +ji,
1j1,i ++1ji, +1j1,i +−
1j1,i −−
w
s
n
p e
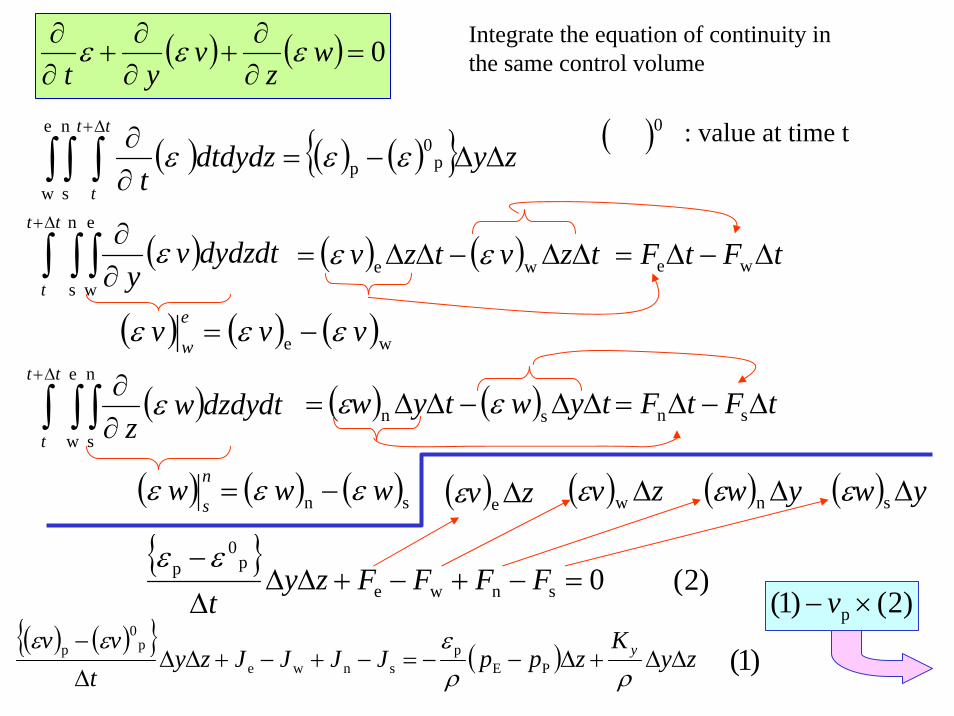
( ) ( ) ( ){ } zydtdydzt
tt
t
ΔΔ−=∂∂
∫ ∫ ∫Δ+
p0
p
e
w
n
s
εεε
( ) dtdydzvy
tt
t∫ ∫ ∫Δ+
∂∂n
s
e
w
ε ( ) ( ) tzvtzv ΔΔ−ΔΔ= we εε
( ) dtdzdywz
tt
t∫ ∫ ∫Δ+
∂∂e
w
n
s
ε
tFtF Δ−Δ= we
( ) ( ) tywtyw ΔΔ−ΔΔ= sn εε
( ) ( ) ( )we vvv e
wεεε −=
( ) ( ) ( )sn www n
sεεε −=
( )0 : value at time t
( ) ( ) 0=∂∂
+∂∂
+∂∂ w
zv
ytεεε Integrate the equation of continuity in
the same control volume
{ }0snwe
p0
p =−+−+ΔΔΔ
−FFFFzy
tεε
)2(
tFtF Δ−Δ= sn
( ) zv Δeε ( ) zv Δwε ( ) yw Δnε ( ) yw Δsε
( ) ( ){ } ( ) zyK
zppJJJJzyt
vv y ΔΔ+Δ−−=−+−+ΔΔΔ
−
ρρεεε
PEp
snwe
p0
p )1(
)2()1( p ×− v
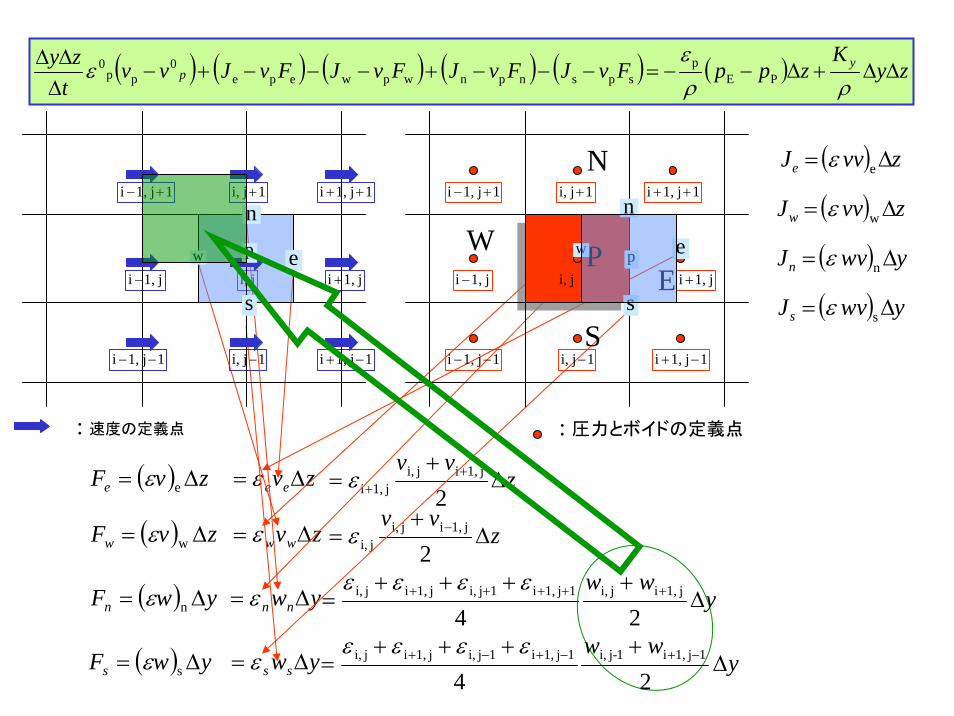
( ) ( ) ( ) ( ) ( ) ( ) zyK
zppFvJFvJFvJFvJvvtzy y
p ΔΔ+Δ−−=−−−+−−−+−ΔΔΔ
ρρε
ε PEp
spsnpnwpwepe0
pp0
( ) zvvJe Δ= eε
( ) zvvJw Δ= wε
( ) ywvJn Δ= nε
( ) ywvJs Δ= sε
( ) zvFe Δ= eε
( ) zvFw Δ= wε
( ) ywFs Δ= sε
( ) ywFn Δ= nε
zvee Δ= ε zvv
Δ+
= ++ 2
j1,iji,j1,iε
zvww Δ= ε zvv
Δ+
= −
2j1,iji,
ji,ε
ywnn Δ= ε yww
Δ++++
= +++++
24j1,iji,1j1,i1ji,j1,iji, εεεε
ywss Δ= ε yww
Δ++++
= −+−+−+
241j1,i1-ji,1j1,i1ji,j1,iji, εεεε
ji,j1,i −
1ji, − 1j1,i −+
j1,i +
1j1,i ++1ji, +
1j1,i −−
1j1,i +−
w p
s
n
e
: 速度の定義点 : 圧力とボイドの定義点
j1,i −
1j1,i −+1ji, −1j1,i −−
j1,i +ji,
1j1,i ++1ji, +1j1,i +−
PE
N
W
S
epw
n
s
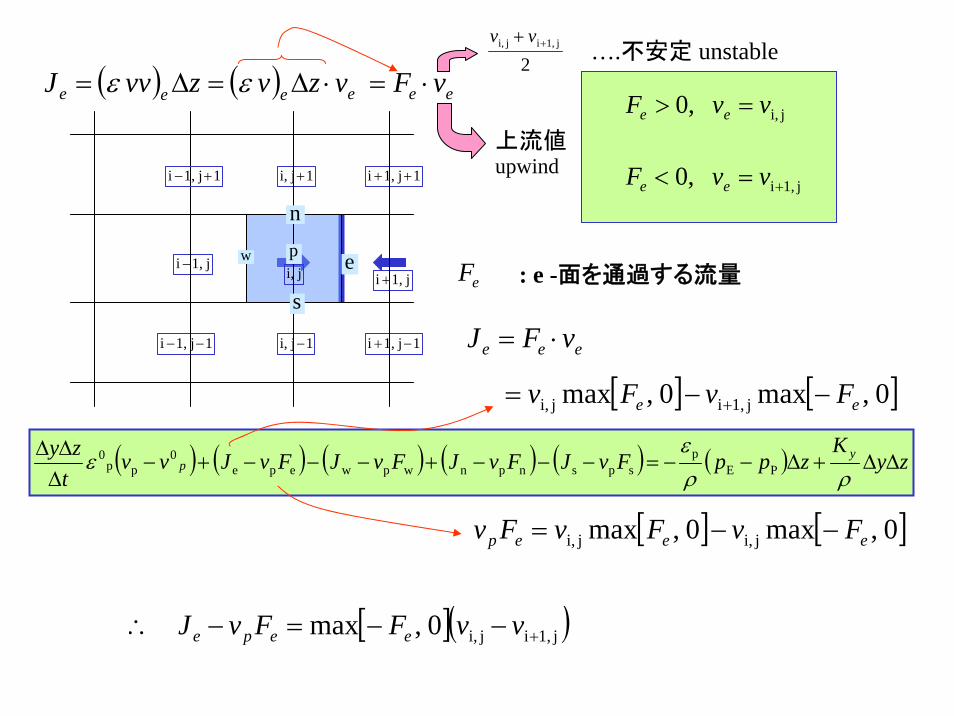
( ) zvvJ ee Δ= ε ( ) ee vzv ⋅Δ= εji, ,0 vvF ee =>
j1,i ,0 +=< vvF ee
: e -面を通過する流量eF
eee vFJ ⋅
….不安定 unstable
=
[ ] [ ]0,max0,max j1,iji, ee FvFv −−= +
( ) ( ) ( ) ( ) ( ) ( ) zyK
zppFvJFvJFvJFvJvvtzy y
p ΔΔ+Δ−−=−−−+−−−+−ΔΔΔ
ρρε
ε PEp
spsnpnwpwepe0
pp0
[ ] [ ]0,max0,max ji,ji, eeep FvFvFv −−=
[ ]( )j1,iji,0,max +−−=−∴ vvFFvJ eepe
2j1,iji, ++ vv
上流値upwind
ee vF ⋅=
ji,j1,i −
1ji, − 1j1,i −+
j1,i +
1j1,i ++1ji, +
1j1,i −−
1j1,i +−
w p
s
n
e
( ) ( ) ( ) ( ) ( ) ( ) zyK
zppFvJFvJFvJFvJvvtzy y
p ΔΔ+Δ−−=−−−+−−−+−ΔΔΔ
ρρε
ε PEp
spsnpnwpwepe0
pp0
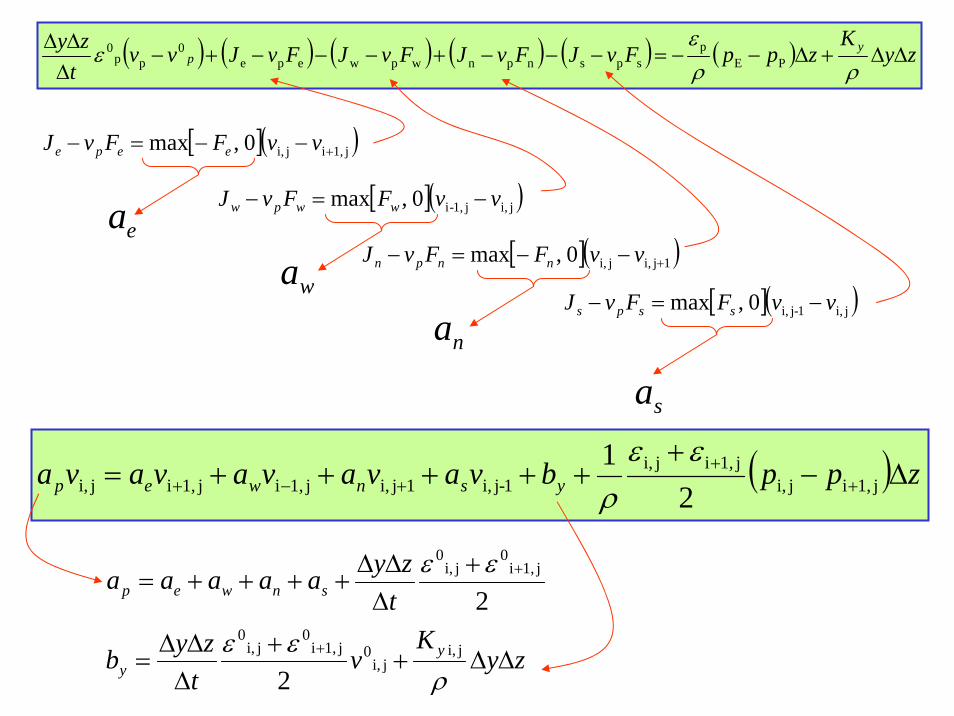
[ ]( )j1,iji,0,max +−−=− vvFFvJ eepe
[ ]( )ji,j1,-i0,max vvFFvJ wwpw −=−
[ ]( )1ji,ji,0,max +−−=− vvFFvJ nnpn
[ ]( )ji,1-ji,0,max vvFFvJ ssps −=−
ea
wa
na
sa
( ) zppbvavavavava ysnwep Δ−+
+++++= ++
+−+ j1,iji,j1,iji,
1-ji,1ji,j1,ij1,iji, 21 εερ
2j1,i
0ji,
0++
ΔΔΔ
++++=εε
tzyaaaaa snwep
zyK
vtzyb y
y ΔΔ++
ΔΔΔ
= +
ρεε ji,
ji,0j1,i
0ji,
0
2
j1,i +
1j1,i ++1ji, +
ji,
1j1,i +−
j1,i −
1j1,i −− 1ji, − 1j1,i −+
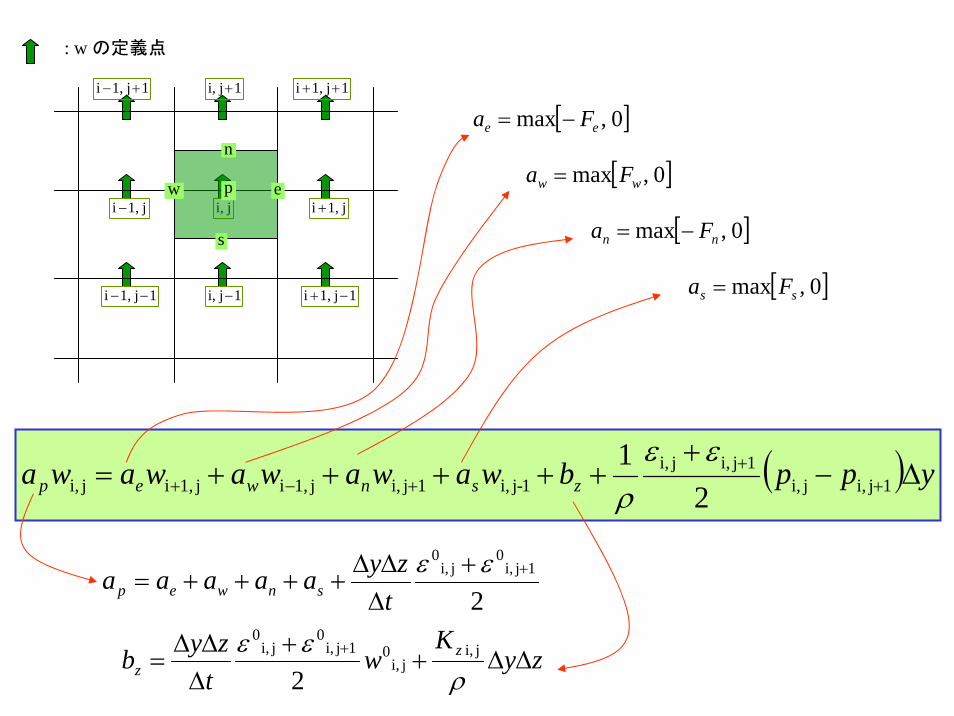
: w の定義点
( ) yppbwawawawawa zsnwep Δ−+
+++++= ++
+−+ 1ji,ji,1ji,ji,
1-ji,1ji,j1,ij1,iji, 21 εερ
21ji,
0ji,
0++
ΔΔΔ
++++=εε
tzyaaaaa snwep
zyK
wtzyb z
z ΔΔ++
ΔΔΔ
= +
ρεε ji,
ji,01ji,
0ji,
0
2
[ ]0,max ee Fa −=
[ ]0,max ww Fa =
[ ]0,max ss Fa =
[ ]0,max nn Fa −=
e
s
n
w p

( ) yppbawwa zpz Δ−+
++= ++∑ 1ji,ji,
1ji,ji,ji,ji, 2
1 εερ
( ) zppbavva ypy Δ−+
++= ++∑ j1,iji,
j1,iji,ji,ji, 2
1 εερ
運動方程式の差分化のまとめ運動方程式の差分化のまとめ
( ) ( ) ( )ρρ
εεεε yKypvw
zvv
yv
t+
∂∂
−=∂∂
+∂∂
+∂∂direction: −y
( ) ( ) ( )ρρ
εεεε zKzpww
zvw
yw
t+
∂∂
−=∂∂
+∂∂
+∂∂direction: −z
( ) zppbvavavavava ysnwep Δ−+
+++++= ++
+−+ j1,iji,j1,iji,
1-ji,1ji,j1,ij1,iji, 21 εερ
( ) yppbwawawawawa zsnwep Δ−+
+++++= ++
+−+ 1ji,ji,1ji,ji,
1-ji,1ji,j1,ij1,iji, 21 εερ
∑av
ji, pya
∑awji, pza
連続の式の差分化discretization of continuity equations
連続の式の差分化discretization of continuity equations
( ) ( ) 0=∂∂
+∂∂
+∂∂ w
zv
ytεεε
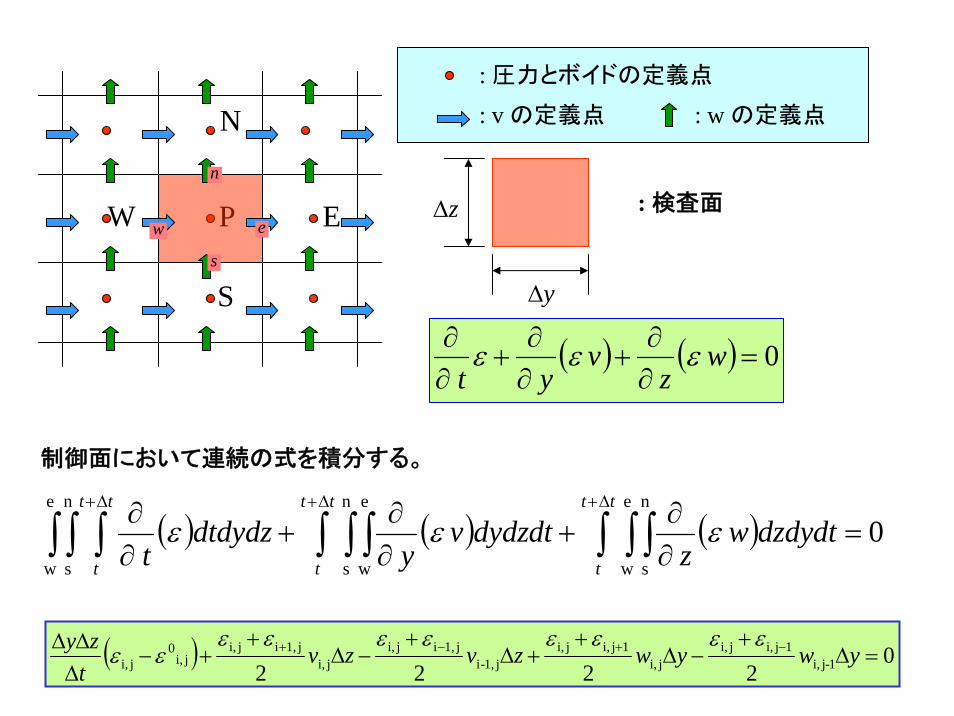
( ) 02222 1-ji,
1ji,ji,ji,
1ji,ji,j1,-i
j1,iji,ji,
j1,iji,ji,
0ji, =Δ
+−Δ
++Δ
+−Δ
++−
ΔΔΔ −+−+ ywywzvzvtzy εεεεεεεε
εε
( ) ( ) 0=∂∂
+∂∂
+∂∂ w
zv
ytεεε
P E
N
W
S
: 検査面
yΔ
zΔ
制御面において連続の式を積分する。
( ) ( ) ( ) 0e
w
n
s
n
s
e
w
e
w
n
s
=∂∂
+∂∂
+∂∂
∫ ∫ ∫∫ ∫ ∫∫ ∫ ∫Δ+Δ+Δ+
dtdzdywz
dtdydzvy
dtdydzt
tt
t
tt
t
tt
t
εεε
: 圧力とボイドの定義点
: w の定義点: v の定義点
ew
s
n

SIMPLE 法の解法アルゴリズムSIMPLE 法の解法アルゴリズム
( ) (3) 02222 1-ji,
1ji,ji,ji,
1ji,ji,j1,-i
j1,iji,ji,
j1,iji,ji,
0ji, =Δ
+−Δ
++Δ
+−Δ
++−
ΔΔΔ −+−+ ywywzvzvtzy εεεεεεεε
εε
( ) (1) 2
1j1,iji,
j1,iji,ji,ji, zppbavva ypy Δ−
+++= +
+∑εε
ρ
( ) (2) 2
11ji,ji,
j1,iji,ji,ji, yppbawwa zpz Δ−
+++= +
+∑εε
ρ
1. 先ず圧力を適当に仮定し、式 (1) と (2) から速度 v、w を求める。
2. もし1で計算した速度が正しかったら、これらの速度値は連続の式 (3)を満足するはずである。代入して調べる。
3. 連続の式が満足されない場合、満足するように圧力を補正する。
4. 補正した圧力を用いて、再び式 (1) と (2) から速度 v、w を求める。 .
5. 再び、v、w を連続の式に代入し、連続の式が満足されるか否か調べる。
満足されない場合、圧力を補正する。
6. 連続の式が満足されるまで上の計算を繰り返す。.
運動方程式momentum equation
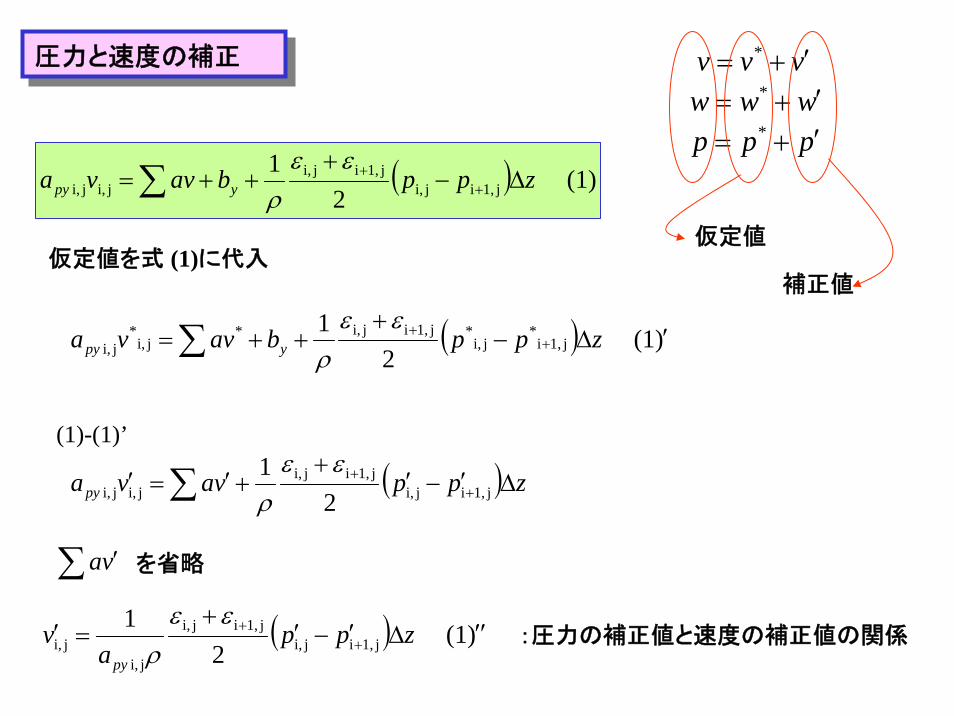
圧力と速度の補正圧力と速度の補正
( ) (1) 2
1j1,iji,
j1,iji,ji,ji, zppbavva ypy Δ−
+++= +
+∑εε
ρ
vvv ′+= *
www ′+= *
ppp ′+= *
仮定値
補正値仮定値を式 (1)に代入
( ) )(1 2
1j1,i
*ji,
*j1,iji,*ji,
*ji, ′Δ−
+++= +
+∑ zppbavva ypy
εερ
(1)-(1)’
( ) zppvavapy Δ′−′+
+′=′ ++∑ j1,iji,
j1,iji,ji,ji, 2
1 εερ
を省略∑ ′va
( ) )(1 2
1j1,iji,
j1,iji,
ji, ji, ′′Δ′−′
+=′ +
+ zppa
vpy
εερ
:圧力の補正値と速度の補正値の関係
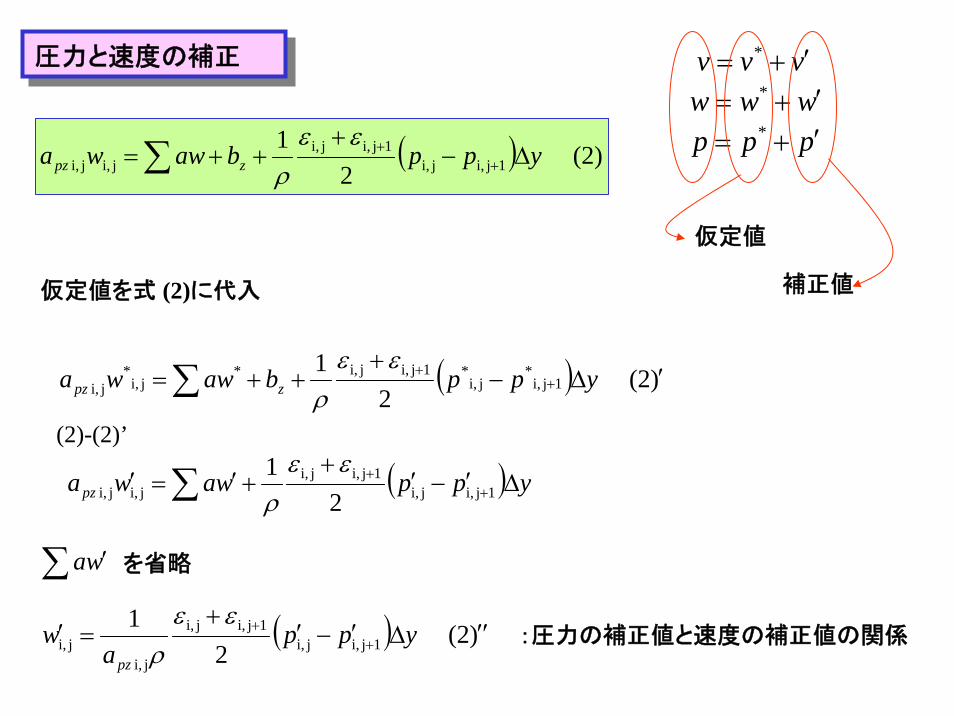
圧力と速度の補正圧力と速度の補正
( ) (2) 2
11ji,ji,
1ji,ji,ji,ji, yppbawwa zpz Δ−
+++= +
+∑εε
ρ
vvv ′+= *
www ′+= *
ppp ′+= *
補正値
仮定値
仮定値を式 (2)に代入
( ) )(2 2
11ji,
*ji,
*1ji,ji,*ji,
*ji, ′Δ−
+++= +
+∑ yppbawwa zpz
εερ
(2)-(2)’
( ) yppwawapz Δ′−′+
+′=′ ++∑ 1ji,ji,
1ji,ji,ji,ji, 2
1 εερ
を省略∑ ′wa
( ) )(2 2
11ji,ji,
1ji,ji,
ji, ji, ′′Δ′−′
+=′ +
+ yppa
wpz
εερ
:圧力の補正値と速度の補正値の関係

( ) )(2 2
11ji,ji,
1ji,ji,
ji, ji, ′′Δ′−′
+=′ +
+ yppa
wpz
εερ
( ) )(1 2
1j1,iji,
j1,iji,
ji, ji, ′′Δ′−′
+=′ +
+ zppa
vpy
εερ
( ) 2
1j1,iji,
j1,iji,
ji,
ji,*
ji,ji,*
ji, zppa
vvvvpy
Δ′−′+
+=′+= ++εε
ρ
( ) yppa
wwwwpz
Δ′−′+
+=′+= ++
1ji,ji,1ji,ji,
ji,
ji,*
ji,ji,*
ji, 21 εερ
( ) (3) 02222 1-ji,
1ji,ji,ji,
1ji,ji,j1,-i
j1,iji,ji,
j1,iji,ji,
0ji, =Δ
+−Δ
++Δ
+−Δ
++−
ΔΔΔ −+−+ ywywzvzvtzy εεεεεεεε
εε
連続の式
となる。が正しい場合、と 0 b w ** =v
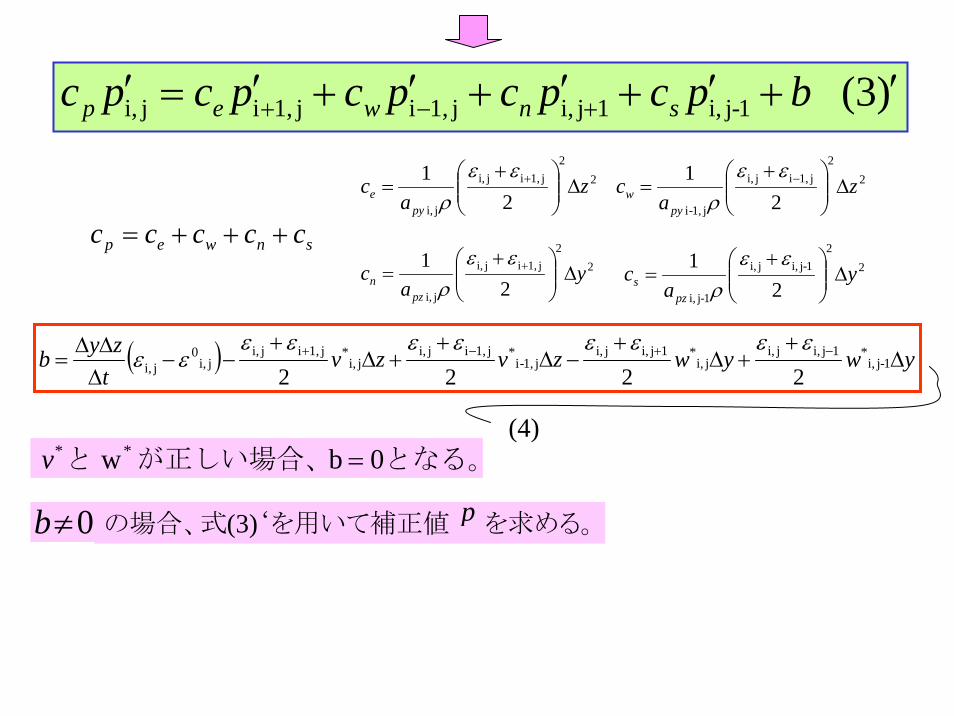
)(3 1-ji,1ji,j1,ij1,iji, ′+′+′+′+′=′ +−+ bpcpcpcpcpc snwep
22
j1,iji,
ji, 21 z
ac
pye Δ⎟⎟
⎠
⎞⎜⎜⎝
⎛ += +εε
ρ2
2j1,iji,
j1,-i 21 z
ac
pyw Δ⎟⎟
⎠
⎞⎜⎜⎝
⎛ += −εε
ρ
22
j1,iji,
ji, 21 y
ac
pzn Δ⎟⎟
⎠
⎞⎜⎜⎝
⎛ += +εε
ρ2
21-ji,ji,
1-ji, 21 y
ac
pzs Δ⎟⎟
⎠
⎞⎜⎜⎝
⎛ +=
εερ
snwep ccccc +++=
( ) ywywzvzvtzyb Δ
++Δ
+−Δ
++Δ
+−−
ΔΔΔ
= −+−+1-ji,
*1ji,ji,ji,
*1ji,ji,j1,-i
*j1,iji,ji,
*j1,iji,ji,
0ji, 2222
εεεεεεεεεε
(4)
の場合、式(3)‘を用いて補正値 を求める。0≠b p
緩和係数relaxation factor
Rα
ppp R ′+= α*
1>Rα
1<Rα

を仮定* p
を計算とを用いてと式 ** )(2 )(1 wv′′
を計算を用いて式 (4) b
δ<b
End
yes
を計算を用いて式 )(3 p′′no
p=p*+p’を用いてpを更新、このpをp*と置き直し、式(1)’ ,(2)’ に代入する。
( ) zppbvavavavava ysnwep Δ−+
+++++= ++
+−+ j1,iji,j1,iji,
1-ji,1ji,j1,ij1,iji, 21 εερ
( ) yppbwawawawawa zsnwep Δ−+
+++++= ++
+−+ 1ji,ji,1ji,ji,
1-ji,1ji,j1,ij1,iji, 21 εερ
bpcpcpcpcpc snwep +′+′+′+′=′ +−+ 1-ji,1ji,j1,ij1,iji,
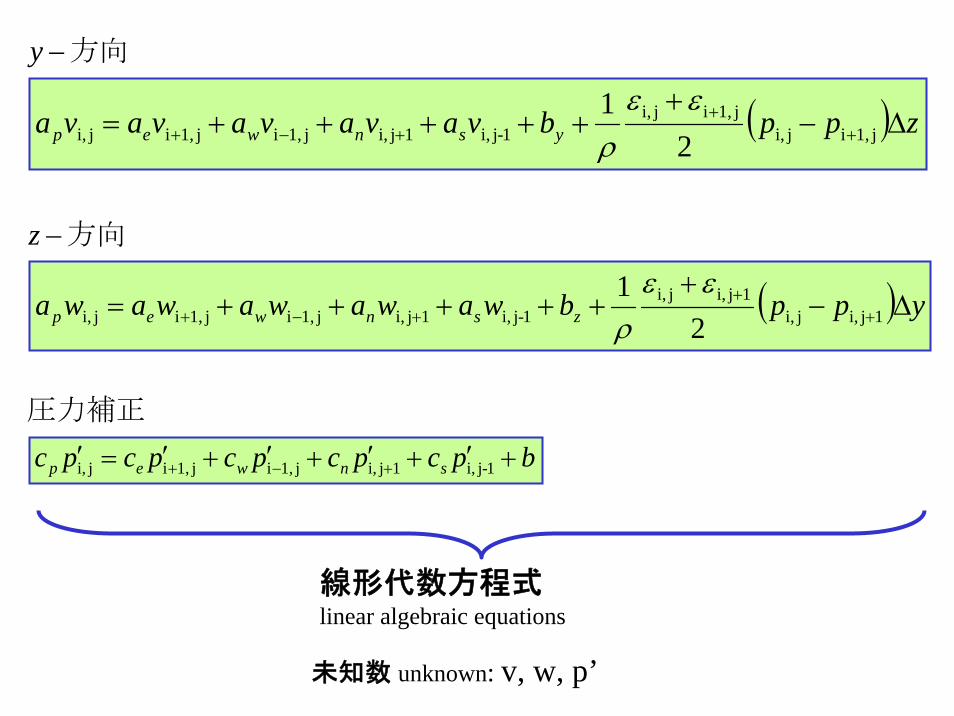
方向−z
方向−y
圧力補正
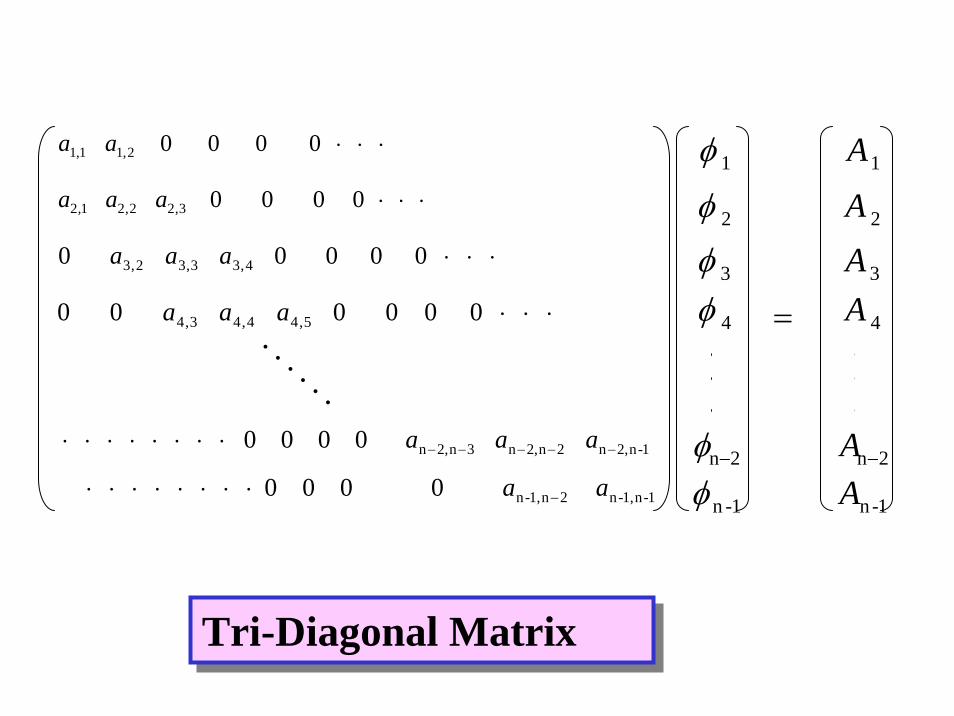
線形代数方程式linear algebraic equations
未知数 unknown: v, w, p’
( ) zppbvavavavava ysnwep Δ−+
+++++= ++
+−+ j1,iji,j1,iji,
1-ji,1ji,j1,ij1,iji, 21 εερ
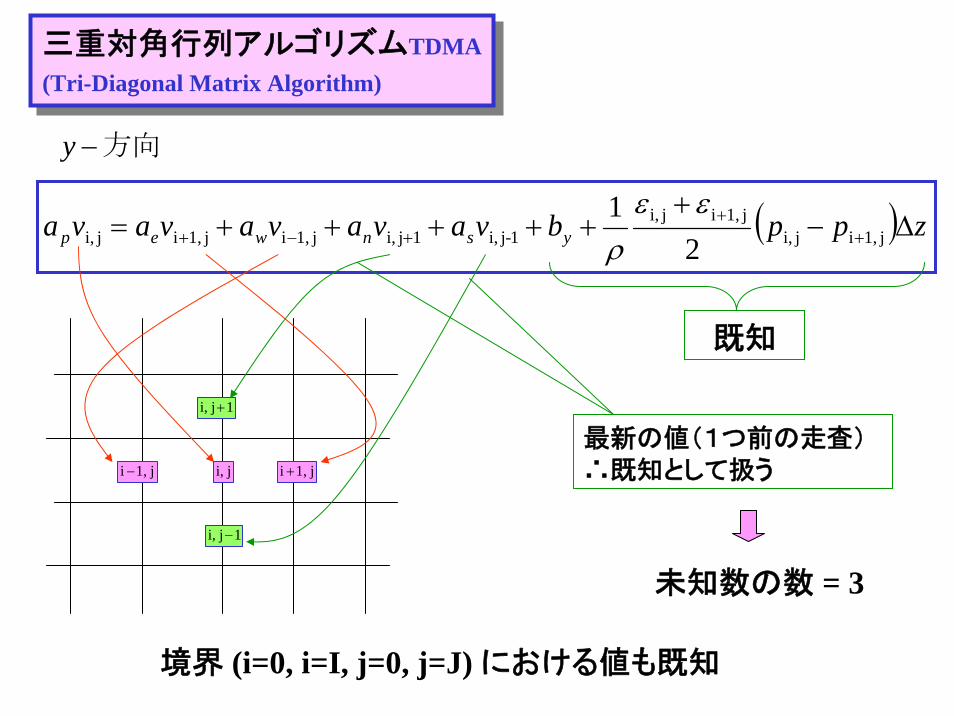
方向−y
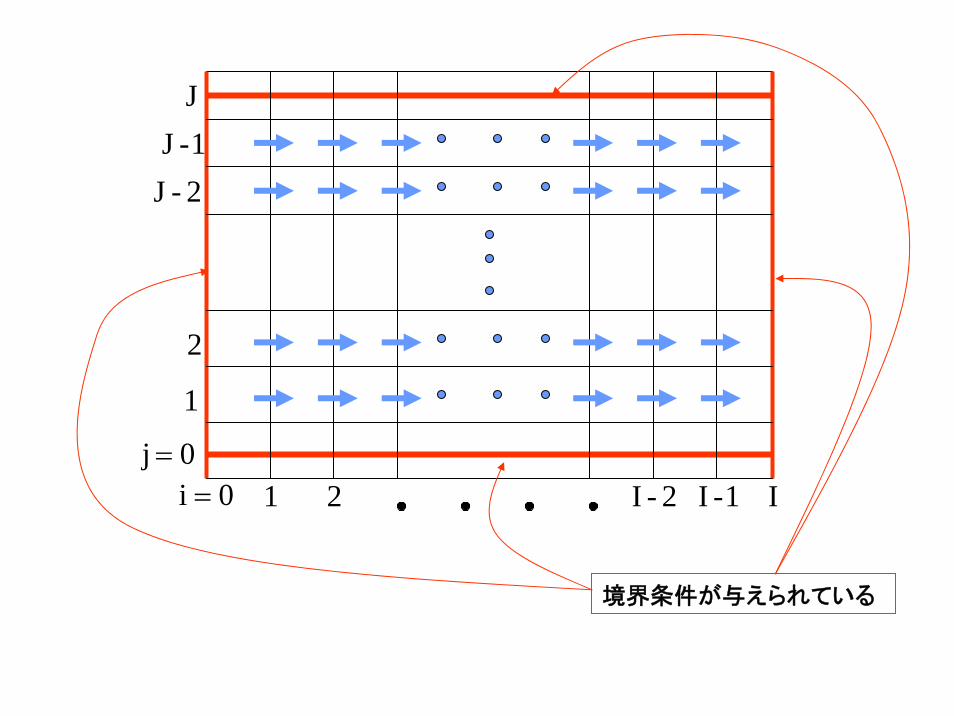
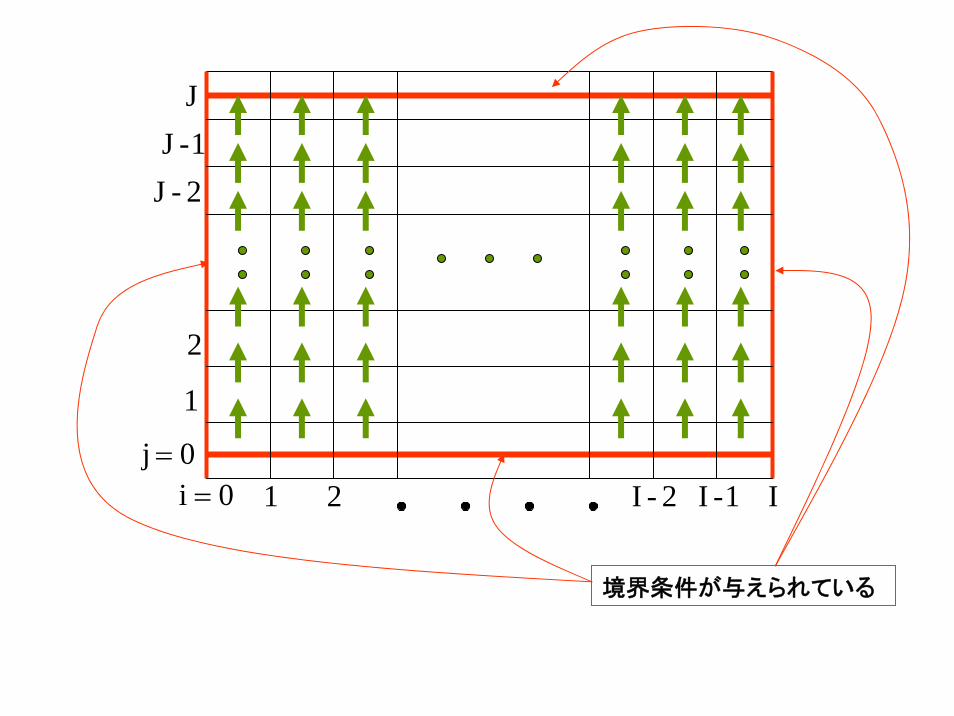
三重対角行列アルゴリズムTDMA (Tri-Diagonal Matrix Algorithm)
三重対角行列アルゴリズムTDMA (Tri-Diagonal Matrix Algorithm)
ji, j1,i +j1,i −
1ji, +
1ji, −
既知
最新の値(1つ前の走査)∴既知として扱う
未知数の数 = 3
境界 (i=0, i=I, j=0, j=J) における値も既知
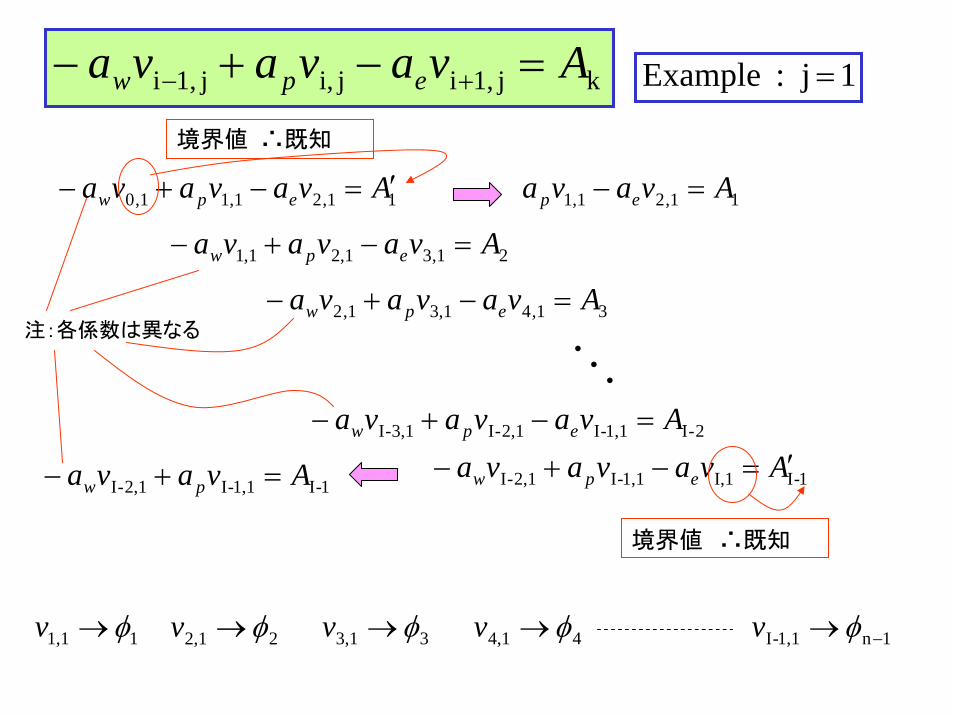
kj1,iji,j1,i Avavava epw =−+− +−
1,121,1,10 Avavava epw ′=−+−
2,132,1,11 Avavava epw =−+−
3,143,1,12 Avavava epw =−+−
1-II,11,1-I2,1-I Avavava epw ′=−+−
1,121,1 Avava ep =−
•••
11,1 φ→v 22,1 φ→v 33,1 φ→v 44,1 φ→v
1-I1,1-I2,1-I Avava pw =+−
境界値 ∴既知
境界値 ∴既知
1n1,1-I −→φv
1j : Example =
2-I1,1-I2,1-I3,1-I Avavava epw =−+−
注:各係数は異なる

⋅⋅⋅ 0 0 0 0 2,11,1 aa
⋅⋅⋅ 0 0 0 0 3,22,21,2 aaa
⋅⋅⋅ 0 0 0 0 0 4,33,32,3 aaa
⋅⋅⋅ 0 0 0 0 0 0 5,44,43,4 aaa
0 0 0 0 1-n2,n2n2,n3n2,n −−−−−⋅⋅⋅⋅⋅⋅⋅⋅ aaa
1-n1,-n2n1,-n 0 0 0 0 aa −⋅⋅⋅⋅⋅⋅⋅⋅
••
••
••
1φ
3φ2φ
4φ
2n−φ
1-nφ
•
•
•
1A
3A2A
4A
2n−A
1-nA
•
•
•
=
三重対角行列Tri-Diagonal Matrix三重対角行列Tri-Diagonal Matrix

2j : Example =kj1,iji,j1,i Avavava epw =−+− +−
1,221,2,20 Avavava epw ′=−+−
2,232,2,21 Avavava epw =−+−
3,243,2,22 Avavava epw =−+−
1-II,21,2-I2,2-I Avavava epw ′=−+−
1,221,2 Avava ep =−
•••
11,2 φ→v 22,2 φ→v 33,2 φ→v 44,2 φ→v
1-I1,2-I2,2-I Avava pw =+−
境界値 ∴既知
境界値 ∴既知
1n1,2-I −→φv
2-I1,2-I2,2-I3,2-I Avavava epw =−+−
注:各係数は異なる
⋅⋅⋅ 0 0 0 0 2,11,1 aa
⋅⋅⋅ 0 0 0 0 3,22,21,2 aaa
⋅⋅⋅ 0 0 0 0 0 4,33,32,3 aaa
⋅⋅⋅ 0 0 0 0 0 0 5,44,43,4 aaa
0 0 0 0 1-n2,n2n2,n3n2,n −−−−−⋅⋅⋅⋅⋅⋅⋅⋅ aaa
1-n1,-n2n1,-n 0 0 0 0 aa −⋅⋅⋅⋅⋅⋅⋅⋅
••
••
••
1φ
3φ2φ
4φ
2n−φ
1-nφ
•
•
•
1A
3A2A
4A
2n−A
1-nA
•
•
•
=
Tri-Diagonal MatrixTri-Diagonal Matrix
1 2 1-I2-I0i = I0j =
2
1
J1-J2-J
境界条件が与えられている
1 2 1-I2-I0i = I0j =
2
1
J1-J2-J
境界条件が与えられている




![CAE 「数値流体力学」輪講 6回...第6回 第3章:乱流とそのモデリング(5) [3.7.2、p.76~84] 「数値流体力学」輪講 1 日時:2014年2月22日、14:00~](https://static.fdocuments.net/doc/165x107/5aae41f67f8b9a22118bc466/cae-66-35.jpg)













