SHAPE-MEMOR - Universidade Nova de Lisboa · SHAPE-MEMOR Y ALLO YS: macromo delling and n umerical...
57
Transcript of SHAPE-MEMOR - Universidade Nova de Lisboa · SHAPE-MEMOR Y ALLO YS: macromo delling and n umerical...
SHAPE-MEMORY ALLOYS:macromodelling andnumerical simulationsof the superelastic behaviorFerdinando Auricchio 1Universita' di Roma "Tor Vergata"Robert L. TaylorUniversity of California at BerkeleyJacob LublinerUniversity of California at Berkeley
Published onComputer Methods Appl. Mech. Engrg, 146 (1997) 281-3121e-mail: [email protected]

AbstractShape-memory alloys show features not present in materials traditionally used inengineering; as a consequence, they are the basis for innovative applications.A review of the available literature shows a dearth of computational toolsto support the design process of shape-memory-alloy devices. A major reasonis that conventional inelastic models do not provide an adequate framework forrepresenting the unusual macrobehavior of shape-memory materials.The present work focuses on a new family of inelastic models, based on aninternal-variable formalism and known as generalized plasticity. Generalized plas-ticity is adopted herein as framework for the development of one- and three-dimensional constitutive models for shape-memory materials.The proposed constitutive models reproduce some of the basic features ofshape-memory alloys, such as superelasticity, di�erent material behavior in ten-sion and compression, and the single-variant-martensite reorientation process.For isothermal conditions the implementation of the model in a �nite-elementscheme and the form of the algorithmically consistent tangent are discussed indetail.Numerical simulations of typical tests performed on shape-memory materials(e.g., uniaxial loading, four-point bending and three-point bending tests) arepresented and compared with available experimental data.Based on the overall developments, it appears that the proposed approach isa viable basis for the development of an e�ective computational tool to be usedin the simulation of shape-memory-alloy devices.

Contents1 Introduction 22 Superelastic applications 43 Essential features of the shape-memory alloy micromechanics 63.1 Phase transformations . . . . . . . . . . . . . . . . . . . . . . . . 63.1.1 Kinematics . . . . . . . . . . . . . . . . . . . . . . . . . . 63.1.2 Kinetics . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.2 An example of shape-memory material: Nitinol . . . . . . . . . . 83.3 Toward a continuum mechanics model . . . . . . . . . . . . . . . 94 Constitutive models for shape-memory alloys 114.1 A simplifying assumption: isotropy . . . . . . . . . . . . . . . . . 114.2 1D-1 model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124.2.1 Control and internal variables . . . . . . . . . . . . . . . . 124.2.2 Phase transformations and activation conditions . . . . . . 124.2.3 Flow rule . . . . . . . . . . . . . . . . . . . . . . . . . . . 144.2.4 Test examples . . . . . . . . . . . . . . . . . . . . . . . . . 164.3 3D-1 model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174.3.1 Control and internal variables . . . . . . . . . . . . . . . . 174.3.2 Phase transformations and activation conditions . . . . . . 174.3.3 Model review . . . . . . . . . . . . . . . . . . . . . . . . . 214.3.4 Material-parameter specialization to uniaxial states . . . . 225 Time-discrete isothermal models and algorithmic implementa-tions 235.1 Kinematics and elastic constitutive equation . . . . . . . . . . . . 235.2 Time-discrete model . . . . . . . . . . . . . . . . . . . . . . . . . 245.3 Integration algorithm for the time-discrete model . . . . . . . . . 255.4 Algorithmic tangent . . . . . . . . . . . . . . . . . . . . . . . . . 275.5 Specialization to linear and exponential ow rules . . . . . . . . . 295.6 Test examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316 Finite-element simulation of shape-memory-alloy devices 336.1 Material-parameter characterization . . . . . . . . . . . . . . . . . 336.2 Four-point bending test . . . . . . . . . . . . . . . . . . . . . . . . 346.3 Three-point bending test . . . . . . . . . . . . . . . . . . . . . . . 356.4 Considerations on the simulations . . . . . . . . . . . . . . . . . . 357 Closure and future research directions 37

Shape-memory alloys: superelastic behavior 21 IntroductionIn the 1960s Buehler and Wiley [7] developed a series of nickel-titanium alloys,with a composition of 53 to 57 % nickel by weight, that exhibited an unusuale�ect: severely deformed specimens of the alloys, with residual strains of 8-15%, regained their original shape after a thermal cycle. This e�ect became knownas the shape-memory e�ect (Figure 1), and the alloys exhibiting it were namedshape-memory alloys.It was later found that not only do other materials have the shape-memoryproperty, but that at su�ciently high temperatures such materials also possessthe property of superelasticity , that is, the recovery of large deformations duringmechanical loading-unloading cycles performed at constant temperature (Figure2). As a consequence of superelastic and shape-memory behavior 1, shape-memoryalloys lend themselves to innovative applications. Recently proposed designsbased on such materials range from self-expanding micro-structures for the treat-ment of body vessel occlusions to devices for the deployment and control of spacestructures such as antennas and satellites.A review of the available literature and personal contacts in the industry,however, show a dearth of computational tools to support the design process.A major reason is the fact that conventional models of inelastic behavior, suchas classical plasticity, do not provide an adequate framework for representingsuperelastic and shape-memory behavior.Based on some pioneering work by Phillips and collaborators [11, 37], over thepast two decades a new family of inelastic models has been developed [20] thatallows the description of features not representable by classical plasticity, thoughit includes classical plasticity as a special case; it has accordingly been called gen-eralized plasticity [21]. As has recently been discussed [3, 4, 23], the numericalimplementation of models belonging to this family is straightforward. Conse-quently generalized plasticity appears to be a viable and exible environment forthe development of constitutive materials with complex behavior.The chief objective of this work is to propose a plausible initial development ofcomputational tools for design with shape-memory alloys through an explorationof the applicability of generalized plasticity to the representation of the supere-lastic behavior, and speci�cally (1) the development of constitutive models thatreproduce the superelastic behavior, (2) the numerical implementation of suchmodels in a �nite-element setting, and (3) the simulation of applications to showthe viability of the proposed approach as an e�ective computational tool for thedesign of devices based on shape-memory alloys.The work is organized as follows. Section 2 explains the reason for the in-1In the following the following abbreviations are used: SMA for shape-memory alloy andSE for superelasticity.FA & RLT & JL CMAME 146 (1997) 281-312 Section 1

Shape-memory alloys: superelastic behavior 3creasing interest on shape-memory materials through a brief survey of SMA-based applications exploiting the superelastic behavior. Section 3 overviews theSMA micromechanics and introduces the terminology used in the study. Thesurvey of the phase transitions occurring in shape-memory alloys allows the in-terpretation of the macroscopic material behavior and prepares the ground forthe development of a continuum material model. Section 4 describes a majorsimplifying assumption (isotropic behavior) and present a one-dimensional and athree-dimensional constitutive model, which reproduce the superelastic behavior.Section 5 describes a time-discrete isothermal version of the three-dimensionalmodel; its algorithmic implementation within a �nite-element framework is care-fully addressed. Numerical tests performed to check the algorithm are presented.The model ability of reproducing macroscopic e�ects, such as Luders band, isdiscussed. Section 6 assesses the ability to perform simulation of typical SMA-based applications and show the potentialities of the proposed approach. Finally,Section 7 closes and comments on the work presented. Extensions and futuredevelopments are also discussed.
FA & RLT & JL CMAME 146 (1997) 281-312 Section 1

Shape-memory alloys: superelastic behavior 42 Superelastic applicationsShape-memory alloys have unique properties which are not present in many ma-terials traditionally used in engineering applications. Accordingly, their use in-troduces new design capabilities, which make it possible to improve device per-formance as well as to propose innovative solutions.The present Section reviews applications exploiting the superelastic behavior;the goal is to use practical examples to show the SMA range of potentialities andto explain the reasons for the growing interest in SMA-based devices. In general,superelasticity-based applications take advantage of one of the following features:(1) the possibility of recovering large deformations (up to strain of 8-15%) (2)the existence of a transformation stress plateau, which guarantees constant stressover non-negligible strain intervals.Medical guidewiresA guidewire is a long, thin, metallic wire, passed into the body through a naturalopening or a small incision. It serves as a guide for the safe introduction ofvarious therapeutic and diagnostic devices. The use of superelastic alloys may(a) reduce the complication of the guidewire taking a permanent kink, which maybe di�cult to remove from the patient without injury; (b) increase steerability,that is, the ability to transmit a twist at one end of the guidewire into a rotationof identical degree at the other end [43].StentsStent is the technical word indicating self-expanding micro-structures, which arecurrently investigated for the treatment of hollow-organ or duct-system occlu-sions. The stent is initially stretched out to reach a small pro�le, which facilitatesa safe, atraumatic insertion of the stent. After being released from the deliverysystem, the stent self-expands to over twice its compressed diameter and exertsa nearly constant, gentle, radial force on the vessel wall [32].OrthodonticsDuring orthodontic therapy tooth movement is obtained through a bone remod-eling process, resulting from forces applied to the dentition. The optimal toothmovement is achieved by applying forces that are low in magnitude and con-tinuous in time. Recently, coil springs using superelastic materials have beendesigned. As proved experimentally [40], they produce excellent results due tothe constant stress that shape-memory alloys are able to exert during a substan-tial part of the transformation.FA & RLT & JL CMAME 146 (1997) 281-312 Section 2

Shape-memory alloys: superelastic behavior 5The Homer MammalokThe Homer Mammalok is a needle wire localizer designed to meet an importantand demanding need in the medical �eld. It is often recommended that anywoman over the age of forty has mammograms every other year. This procedurefrequently identi�es small lesions which must be removed and examined micro-scopically. The procedure for removing the lesion is made di�cult because thereare no landmarks to guide the surgeon and because the lesion cannot be easilydistinguished in any obvious way from the surrounding tissue. At the same time,as little as possible excess tissue should be removed. The method currently usedis to place a needle in the breast at the site of the lesion as a guide to the surgeonduring the removal. To prevent accidental advancement or withdrawal during thetransit to the operating room, the end of the needle has a barb; due to the sharpbarb shape, tissue damages are possible and the repositioning the needle is notpossible. Superelastic alloys can be used to have self-deploying, rounded hooks,which do not move, due to their shape, and which can be easily repositionedwithout causing tissue damages [36].Eyeglass framesBy using the superelasticity, eyeglass frame components can withstand extremedeformations and spring back completely [9].ConclusionsThe survey presented above clearly shows that shape-memory materials have awide range of applications. Recently, international conferences on superelasticand shape-memory technologies have also been organized, testifying to an in-creasing interest on the subject. However, a review of the available literature andpersonal contacts in industry shows a lack of computational design tools. Accord-ingly, the aim of the next Sections is to propose a plausible initial developmentof such design tools.To reach this goal, we �rst review the phase transformations occurring inshape-memory materials. This allows an interpretation of the superelastic e�ectfrom a micromechanical point of view. A thermomechanical framework alreadypresented in literature is then adopted for the development of SMA constitutivemodels. Finally, after discussing a �nite-element implementation of the models,some sample problems are studied.FA & RLT & JL CMAME 146 (1997) 281-312 Section 2

Shape-memory alloys: superelastic behavior 63 Essential features of the shape-memory alloymicromechanicsThe present Section presents a survey of the shape-memory alloy micromechan-ics. It then focuses on Nitinol, which is probably the shape-memory materialmost commonly used in applications. The main objectives are to help the under-standing of the material macroscopic behavior and to prepare the ground for thedevelopment of constitutive models.3.1 Phase transformationsShape-memory alloys belong to a class of materials that can undergo reversiblechanges in the crystallographic symmetry-point-group. Such changes can be in-terpreted as martensitic phase transformations, that is, as solid-solid displacive-di�usionless (or lattice-distortive) phase transformations between a crystallo-graphically more-ordered phase, called austenite or parent phase, and a crys-tallographically less-ordered phase, called martensite. Typically, the austenite isstable at high temperatures and low values of the stress, while the martensite isstable at low temperatures and high values of the stress. For a stress-free statewe indicate with T SAf the temperature above which only the austenite is stableand with TAMf the temperature below which only the martensite is stable.The phase transformations between austenite and martensite are the key toexplain the superelasticity e�ect. For the simple case of uniaxial tensile stressa brief explanation follows (Figure 2). Consider a specimen in the austeniticstate and at a temperature greater than T SAf ; accordingly, at zero stress onlythe austenite is stable. If the specimen is loaded, while keeping the temperatureconstant, the material presents a nonlinear behavior (ABC) due to a stress-induced conversion of austenite into martensite. Upon unloading, while againkeeping the temperature constant, a reverse transformation from martensite toaustenite occurs (CDA) as a result of the instability of the martensite at zerostress. At the end of the loading-unloading process no permanent strains arepresent and the stress-strain path is a closed hysteresis loop.The study of martensitic transformations can be approached from di�erentpoints of view. In the following we brie y review some aspects of the kinematicsand the kinetics of the martensitic phase transformations occurring in shape-memory alloys.3.1.1 KinematicsBy the kinematics of a martensitic phase transformation we mean the changes ofatomic structures occurring during the phase transformation.Formation of a single martensite crystalFA & RLT & JL CMAME 146 (1997) 281-312 Section 3

Shape-memory alloys: superelastic behavior 7In general, single martensite crystals have a platelet shape. From experimentalobservation occurring during the formation of a martensite single crystal froma parent single crystal specimen, it can be deduced that the plate formation isaccompanied by a macroscopic deformation, called shape change or shape defor-mation. Moreover, a well-de�ned interface or contact plane between the austeniteand the martensite, the so-called habit plane, is observed.From a crystallographic point of view, we just recall that in general SMA-parent phases have super-lattice BCC structures and are classi�ed as �-phasealloys. The martensite crystals have periodic stacking order structures. Since inthe martensite atoms of di�erent radii are packed without any symmetry, thesuper-lattice structure tends to deform slightly, resulting in a typical monocliniccon�guration.Self-accommodation and martensite variantsAs was recognized by Bain [5], the formation of martensite plates cannot sim-ply follow the single-crystal mechanism discussed above. In fact, this mecha-nism introduces a major accommodation problem, due to the mis�t between themartensite and the surrounding austenite.If there is no preferred direction for the occurrence of the transformation,the martensite takes advantage of the existence of di�erent possible habit planes,forming a series of crystallographically equivalent variants. The product phaseis then termed multiple-variant martensite and is characterized by a twinnedstructure, which minimizes the mis�t between the martensite and the surroundingaustenite (Figure 3).On the other hand, if there is a preferred direction for the occurrence of thetransformation (often associated with a state of stress), all the martensite crystalstend to be formed on the most favorable habit plane. The product phase is thentermed single-variant martensite and is characterized by a detwinned structure,which again minimizes the mis�t between the martensite and the surroundingaustenite (Figure 4).According to the existence of di�erent types of single-variant martensiticspecies, the conversion of each single-variant martensite into di�erent single vari-ants is possible. Such process, known as reorientation process, can be interpretedas a family of martensitic phase transformations and is associated with changesin the parameters governing the single-variant martensite production (hence, itis often associated to non-proportional changes of stresses).Martensite-martensite transformationsDepending on the alloy, di�erent martensitic structures may progressively beformed from the austenite during the cooling process. They all have stacking-order structures with the same basal plane and di�er just in the stacking se-quences.The process of production of these di�erent martensitic structures can alsoFA & RLT & JL CMAME 146 (1997) 281-312 Section 3

Shape-memory alloys: superelastic behavior 8be interpreted as martensitic phase transformations.3.1.2 KineticsBy the kinetics of a phase transformation we mean the phase transformation evo-lution process. The martensitic transformations occur by nucleation and growth.Depending on the accommodation response between the parent and the prod-uct phases (either plastic or elastic), the martensitic phase transformations areclassi�ed as non-thermoelastic (such as in Fe-Ni) or thermoelastic (in typical �-phase alloys) 2 [46]. For thermoelastic transformations the accommodation of themartensite plates within the parent phase is essentially elastic, with no dislocationgeneration; the interface remains glissile, capable of backward movements, andthe reverse transformation proceeds through shrinkage of martensite plates. Themagnitude of the hysteresis, which is related to the transformation driving force,is in general small. Shape-memory alloys usually present thermoelastic marten-sitic transformations, guaranteeing the reversibility of the transformations.Once the conditions for the nucleation are satis�ed, depending on the alloy, themartensitic transformation may proceed in three di�erent modes: the athermalmode, the isothermal mode and the burst mode [38]. In general, shape-memoryalloys undergo the athermal (or achronic) mode, that is, the amount of martensiteformed is a function only of the temperature and not of the length of time atwhich the alloy is held at that temperature. Athermal transformations start atwell-de�ned temperatures, which are usually insensitive to rate-e�ects.The phase-transformation kinetics is in general strongly in uenced by a com-plex combination of internal and external parameters. Internal parameters are:the alloy system, the composition and the lattice structure including defects. Ex-ternal parameters are: the thermomechanical treatment and the training. There-fore, for each alloy a careful macroscopic characterization of the material kineticsthrough experimental investigation is needed.3.2 An example of shape-memory material: NitinolHaving laid down the general features of the martensitic transformations, wenow specialize the discussion to nickel-titanium alloys, which are probably theshape-memory materials most frequently used in commercial applications.Shape-memory properties for nickel (Ni) titanium (Ti) alloys were discoveredin the 1960s, at the Naval Ordnance Laboratory (NOL) [7]; hence, the acronymNiTi-NOL or Nitinol, which is commonly used when referring to Ni-Ti basedshape-memory alloys. Starting from the 1970s, Ni-Ti has been widely investi-gated due to its frequent use in applications [10, 16, 48].2The non-thermoelastic phase transformations are also called strong, the thermoelastic phasetransformations are also called weak.FA & RLT & JL CMAME 146 (1997) 281-312 Section 3

Shape-memory alloys: superelastic behavior 9Metallurgical propertiesA detailed discussion of crystallographic aspects, including possible self-accommo-dation mechanisms, can be found in References [6, 24, 25, 26, 27, 33, 34].The phase transformations occur in temperature ranges which strongly de-pend on the material composition. To obtain a desired phase-transformationtemperature range, the required composition accuracy is mostly higher than theone obtainable by usual error in chemical analysis. Accordingly, in most casesthe transformation temperatures are directly measured as quality control, ratherthan the chemical composition. Depending on the composition, TAMs ranges from-100oC to 100oC.Thermomechanical propertiesThe amount of heat recoverable memory strain and the size of the hysteresisloop strongly depend on alloy composition, thermomechanical processing, testingdirection and deformation mode (that is, if the material is in simple tension, sim-ple compression or shear) [1, 31]. If strains larger than the recoverable strain areinduced, then the reversible martensitic processes and the dislocations resultingfrom plastic ow interact, resulting in a reduction of the memory strain. For thefull austenite-martensite phase transformation the recoverable memory strain isof the order of 8%, while the hysteresis width is typically of 30-50oC.For uniaxial states of stress and in the usual range of applications the stress-temperature regions in which the phase transformations may occur are delimitedwith good approximation by straight lines with slopes ranging from 2.5 MPa/oCto over 15 MPa/oC. Experimental evidence shows that:� Phase transformations do not exhibit pressure dependence in the case oflong-aged Ni-Ti; for short-aged Ni-Ti the R-phase (B2-R) transition is un-a�ected by pressure, while the martensitic (R-B190) transformation is pres-sure dependent [17].� Phase transformations are insensitive to temperature rates and to stressrates [8].3.3 Toward a continuum mechanics modelThe presented survey on the SMA micromechanics and in particular the discus-sion on the Nitinol highlight the variety and the complexity of the phenomenaoccurring at the material microscale. Accordingly, the construction of a shape-memory-alloy constitutive model based directly on the phase-transition microme-chanics seems to be an overwhelming task. Thus, we resort to a thermomechanicalcontinuum theory based on an internal-variable formalism. The speci�c materialmicromechanics is then tied in through the choice of appropriate simplifying as-sumptions, internal variables, and evolution equations for the internal variables.FA & RLT & JL CMAME 146 (1997) 281-312 Section 3

Shape-memory alloys: superelastic behavior 10From the previously discussed kinematics of the SMA martensitic phase trans-formations, we may deduce some indications on the structure of the internal vari-ables. In fact, depending on the level of description to be reached, the internalvariables should describe the presence and the features of the di�erent phases;thus, they should be related to the phase fractions and orientations.On the other hand, from the previously discussed kinetics of the SMA marten-sitic phase transformations, we may deduce some general features to take intoaccount in the constitutive model through the choice of the internal-variableevolutionary equations. For example, the model should be able to take into con-sideration:� Di�erent initial and �nal conditions for each phase transformation to re-produce the hysteretic behavior.� Dependence of the phase-transition initial conditions on stress and temper-ature.� Pressure dependence of some phase transition in terms of initial conditionsand evolutionary equations.� Possibility of completely reversing the phase-transformation e�ects throughappropriate thermomechanical cycles.Finally, since experimental evidence shows that the phase transformations occur-ring in several shape-memory alloys are rate-independent, the goal of the nextSections is to develop inelastic rate-independent models able to reproduce thesuperelastic behavior.
FA & RLT & JL CMAME 146 (1997) 281-312 Section 3

Shape-memory alloys: superelastic behavior 114 Constitutive models for shape-memory alloysA general inelastic theory well suited for the development of constitutive modelsfor materials undergoing solid-solid phase transitions has been presented in Ref-erences [2, 22]. Such a theory is specialized herein to a speci�c class of materialsundergoing solid-solid phase transitions, the shape-memory alloys. After dis-cussing a major simplifying assumption, a one-dimensional model (1D-1 model)and a three-dimensional model (3D-1 model) are presented. The 1D-1 model hasbeen already been presented in literature [22]; however, due to the novelty of theinelastic frame adopted 3, it is reviewed here with a didactic purpose. Moreover,since for proportional loading the 3D-1 model reduces to the 1D-1 model, the lat-ter can also be interpreted as the basis for the development of the more complexthree-dimensional model.4.1 A simplifying assumption: isotropyThe survey on the kinematics of the SMA martensitic phase transformations pre-sented in Section 3.1.1 pointed out the existence of several types of martensite,each one present with its own family of variants. To limit the dimension of theproblem to handle, in the following we consider only one type of martensite.Moreover, we assume the material to be isotropic; accordingly, we do not dis-tinguish between the di�erent single-variant species. Hence, we propose to workwith only two phases: the austenite (A) and the single-variant martensite (S).Taking into account only two phases, the number of possible phase transfor-mations drastically decreases. However, to properly model the three-dimensionalmacrobehavior of shape-memory materials, we need to take into account thesingle-variant-martensite reorientation process. Therefore, in the most generalcase we consider three phase transformations:� conversion of austenite into single-variant martensite (A ! S)� conversion of single-variant martensite into austenite (S ! A)� single-variant martensite reorientation (S ! S)Finally, we recall that all the proposed models are rate-independent; this assump-tion, with good approximation, is appropriate for applications using Nitinol (referto Section 3.2) as well as other shape-memory alloys frequently used.3Several constitutive models for shape-memory alloys have been proposed and are availablein the literature. Without even attempting to give an exhaustive list, few examples can befound in References [12, 13, 35, 15, 39, 44, 45, 47].FA & RLT & JL CMAME 146 (1997) 281-312 Section 4

Shape-memory alloys: superelastic behavior 124.2 1D-1 modelThe 1D-1 model reproduces the superelastic e�ect for one-dimensional states ofstress (or equivalently, for proportional loading conditions).4.2.1 Control and internal variablesAs control variables, we assume the uniaxial stress, �, and the relative temper-ature, T , subsequently referred to as the temperature. As internal variables, wemay choose either the single-variant martensite fraction, �S 4, or the austenitefraction, �A, which are assumed to satisfy the following relation at each time:�S + �A = 1 (1)Accordingly, there is only one independent internal variable, chosen herein to be�S. From equation 1 we may also get a relation between the rates of the fractions:_�S + _�A = 0 (2)For simplicity, during the construction of the model we prefer to deal with bothparameters, ensuring that the fraction evolutions always satisfy equation 2; asa consequence, at each time equation 1 is also satis�ed. Finally, for each phasetransformation we �nd it more convenient to establish �rst the evolutionary equa-tion associated with the reducing fraction, deriving the evolution of the otherfraction by enforcement of equation 2.4.2.2 Phase transformations and activation conditionsTo reproduce the superelastic behavior in a uniaxial state of stress, only twophase transformations can be considered: the conversion of austenite into single-variant martensite (A! S) and the conversion of single-variant martensite intoaustenite (S ! A).As showed experimentally, for uniaxial stress-temperature changes and in theusual range of applications, the regions in which phase transformations may occurare delimited with good approximation by straight lines [14, 31]. Assigning afraction change to each process we set 5:_�S = _�ASS + _�SAS (3)_�A = _�ASA + _�SAA (4)4By convention, the capital letters S and A used as indices refer to speci�c fractions (S =single-variant martensite, A = austenite). Moreover, �i = 0 (i = S;A) indicates the absence ofthe corresponding phase in the material, while �i = 1 indicates that the material is completelyin such a phase.5By convention, the superscripts refer to speci�c evolution processes; accordingly, the su-perscript AS refers to the conversion of austenite into single-variant martensite, while thesuperscript SA refers to the conversion of single-variant martensite into austenite.FA & RLT & JL CMAME 146 (1997) 281-312 Section 4

Shape-memory alloys: superelastic behavior 13We now discuss the two production processes in more detail.Single-variant martensite productionTo describe the region corresponding to the single-variant martensite productionprocess, we introduce the functions:FAS = � � CAST (5)FASs = FAS � RASs (6)FASf = FAS � RASf (7)with: RASs = CASTASs (8)RASf = CASTASf (9)where CAS, TASs and TASf are material parameters, with the latter two repre-senting initial and �nal temperatures at which the transformation may occur atzero stress (Figure 5). The region in which the transformation may take place isdescribed by: FASs > 0 ; FASf < 0 ) FASs FASf < 0 (10)Moreover, to activate the production of single-variant martensite, a stress in-crease, a temperature decrease or a proper combination of these actions shouldoccur. Hence, we require: _FAS > 0 (11)Taking into account equations 10-11, we express the fraction evolutionary equa-tions relative to the A! S phase transformation in the form:_�ASA = KAS1 <� FASs FASf >< _FAS>_�ASS = � _�ASAwhere KAS1 is a scalar function of the state variables (control and internal vari-ables) and < � > is the Macaulay bracket, de�ned as <x> = (x + jxj)=2 wherej � j is the absolute value.Austenite productionSimilarly to the above, we introduce the functions:F SA = � � CSAT (12)F SAs = F SA � RSAs (13)F SAf = F SA � RSAf (14)with: RSAs = CSAT SAs (15)RSAf = CSAT SAf (16)FA & RLT & JL CMAME 146 (1997) 281-312 Section 4

Shape-memory alloys: superelastic behavior 14where CSA, T SAs and T SAf are material parameters, with the latter two represent-ing initial and the �nal temperatures at which the transformation may occur atzero stress (Figure 6). The region in which the transformation may take place isdescribed by: F SAs < 0 ; F SAf > 0 ) F SAs F SAf < 0 (17)Moreover, to activate the production of austenite a stress decrease, a temperatureincrease or a proper combination of these actions should occur. Hence, we require:_F SA < 0 (18)Taking into account equations 17 and 18, we express the fraction evolutionaryequations relative to the S ! A phase transformation in the form:_�SAS = KSA1 <� F SAs F SAf ><� _F SA>_�SAA = � _�SASwhere KSA1 is a scalar function of the state variables.Remark 4.1 Because of the general framework in which the model is developed,there is no limitation to the relative position of the two phase-transition zones;hence, they may intersect or they may be disjoint, since neither case would beproblematic for the constitutive model.4.2.3 Flow ruleTo complete the speci�cation of the rate equations, we need to choose KAS1 andKSA1 . We restrict attention to very simple �rst-order forms. A possible choice isan evolution of exponential type, such as:_�ASA = � _�ASS = ��AS�A <� FASs FASf >jFASs FASf j < _FAS>(FASf )2 (19)_�SAS = � _�SAA = ��SA�S <� F SAs F SAf >jF SAs F SAf j <� _F SA>(F SAf )2 (20)where �AS and �SA are scalar constants, measuring the rates at which the trans-formations proceed. A second possible choice is an evolution of power type, suchas: _�ASA = � _�ASS = +�AS�A <� FASs FASf >jFASs FASf j < _FAS>FASf (21)_�SAS = � _�SAA = ��SA�S <� F SAs F SAf >jF SAs F SAf j <� _F SA>F SAf (22)FA & RLT & JL CMAME 146 (1997) 281-312 Section 4

Shape-memory alloys: superelastic behavior 15In the following we limit the discussion of the power-type evolution to �AS =�SA = 1; hence, the evolution equation is termed as linear type. A discussion ofthe proposed evolutionary equations can be found in Reference [2]. Clearly, otherchoices for KAS1 and KSA1 are possible [29]; however, from experimental results a�rst-order kinetic rule seems to be adequate [18].Since the model has only one independent internal variable (chosen to be �S),we need only one evolutionary equation. Recalling equations 1-3, we have:_�S = _�ASS + _�SAS = �AS(1� �S) <� FASs FASf >jFASs FASf j < _FAS>(FASf )2 (23)��SA�S <� F SAs F SAf >jF SAs F SAf j <� _F SA>(F SAf )2for the exponential model and:_�S = _�ASS + _�SAS = �(1� �S) <� FASs FASf >jFASs FASf j < _FAS>FASf (24)��S <� F SAs F SAf >jF SAs F SAf j <� _F SA>F SAffor the linear model. The Macaulay brackets manage the choice of the activeevolution process. We may express the ow rules also in the following equivalentforms: _�S = HAS�AS(1� �S) _FAS�FASf �2 +HSA�SA�S _F SA�F SAf �2 (25)for the exponential model and:_�S = �HAS(1� �S) _FASFASf +HSA�S _F SAF SAf (26)for the linear model. The scalar parameters HAS and HSA embed the phase-transformation activation conditions and are de�ned by the relations:HAS = ( 1 if FASs > 0 ; FASf < 0 ; _FAS > 00 otherwise (27)HSA = ( 1 if F SAs < 0 ; F SAf > 0 ; _F SA < 00 otherwise (28)Remark 4.2 The ow equations 23-24 can be integrated in closed form, as de-scribed in Reference [2].FA & RLT & JL CMAME 146 (1997) 281-312 Section 4

Shape-memory alloys: superelastic behavior 164.2.4 Test examplesWe now test the ability of the model to reproduce the superelastic behavior undermultiple stress cycles. Restricting the discussion to a small-deformation regime,we assume an additive decomposition of the total strain �:� = �e + �L�S (29)where �e is the elastic strain and �L is the maximum residual strain 6. The elasticstrain is assumed to be linearly related to the stress:� = E�e (30)with E the elastic modulus. We limit the test example to the exponential owrule and choose the following material parameters:E = 1000 MPa ; CAS = CSA = 1 MPa/oC�L = 10 ; �AS = �SA = 10 MPaTASf = 10 oC ; TASs = 70 oC ; T SAs = 90 oC ; T SAf = 130 oCWe assume to start always with a specimen in the austenitic phase (�S = 0) andto keep the temperature constant (T = 160 oC > T SAf ). In the �rst simulation(Figure 7) we induce a complete set of transformations (that is, a complete A! Sand a complete S ! A transformation), followed by partial unloading-reloadingcycles. A partial reloading implies an incomplete direct transformation (A! S),while a partial unloading implies an incomplete reverse transformation (S ! A).Note that the model describes a series of loops, which are internal to the completeloading-unloading cycle; such internal loops present a ratcheting e�ect whichstabilizes after a few cycles. As test examples, we also consider the case of partialloading with complete unloading, the case of partial unloading with completeloading and the case of partial loading and partial unloading (Figures 8-10).Comparing these results with experimental data available in the literature [19,30, 35], it is possible to conclude that the proposed model has an appropriatequalitative behavior.6The maximum residual strain �L, regarded as a material constant, is a measure of themaximum deformation obtainable by multiple-variant martensite detwinning, hence, it is ameasure of the maximum deformation obtainable aligning all the single-variant martensites inone direction. Within a small-deformation regime the assumed additive strain decompositionis consistent with the experimental observation in which for zero stress the residual strain isassociated only with the amount of single-variant martensite.FA & RLT & JL CMAME 146 (1997) 281-312 Section 4

Shape-memory alloys: superelastic behavior 174.3 3D-1 modelThe 3D-1 model reproduces the superelastic behavior for three-dimensional statesof stresses; hence, it is a three-dimensional generalization of the 1D-1 model.4.3.1 Control and internal variablesAs control variables, we assume the stress, � , and the temperature, T . To capturethe phase transformation e�ects, we introduce the transformation strain �tr, givenby: �tr = �Lu (31)where u is the scaled transformation strain and �L is a scalar parameter repre-senting the maximum deformation obtainable only by detwinning of the multiple-variant martensite. Accordingly, as internal variables, we assume u and thesingle-variant martensite fraction, �S; thus, the model has one tensorial and onescalar internal variable.4.3.2 Phase transformations and activation conditionsWe consider three phase transformations:� conversion of austenite into single-variant martensite (A! S),� conversion of single-variant martensite into austenite (S ! A),� reorientation of the single-variant martensite (S ! S).Assigning a change of u and � to each processes, we set:_u = _uAS + _uSA + _uSS (32)_�S = _�ASS + _�SAS (33)Note that the reorientation process occurs at constant value of the martensitefraction, consequently, there is no corresponding contribution in the evolution ofthe single-variant martensite fraction, that is, _�SSS = 0.Each of the three phase transformations is assumed to occur in a speci�cregion of the control-variable hyperplane � -T , as discussed in the following.Conversion of austenite into single-variant martensite (A! S)As mentioned in Section 3, some phase transformations are pressure-dependent.To model such an e�ect, we introduce a Drucker-Prager-type loading function:FAS(� ; T ) = ktk+ 3� p� CASTwhere t is the deviatoric part of the stress (de�ned as: t = � � tr(� )1=3), p is thepressure, CAS and � are material parameters and k � k indicates the EuclideanFA & RLT & JL CMAME 146 (1997) 281-312 Section 4

Shape-memory alloys: superelastic behavior 18norm. Generalizing the one-dimensional model (equations 5-9), the initial and�nal transformation function can be expressed as:FASs = FAS � RASsFASf = FAS � RASfwith: RASs = 24�ASs 0@s23 + �1A� CASTASs 35RASf = 24�ASf 0@s23 + �1A� CASTASf 35where �ASs , �ASf , TASs and TASf are all material parameters. We assume that theconditions for the conversion of austenite into single-variant martensite are:FASs > 0 ; FASf < 0 ; _FAS > 0 (34)and that the scaled transformation strain corresponding to the A! S phasetransformation evolves as follows:_uAS = _�ASS NAS (35)where: NAS = MASkMASk , MAS = @FAS@� (36)Recalling again the discussion on the 1D-1 model, for the evolution of the single-variant martensite fraction we may assume either an exponential form:_�ASS = HAS�AS(1� �S) _FAS�FASf �2with �AS a material parameter, measuring the speed of the transformation, or alinear form: _�ASS = �HAS(1� �S) _FASFASfThe scalar parameter HAS embeds the conditions for the activation of the phasetransformation (equation 34) and it is de�ned by the relation:HAS = ( 1 if FASs > 0 ; FASf < 0 ; _FAS > 00 otherwise (37)FA & RLT & JL CMAME 146 (1997) 281-312 Section 4

Shape-memory alloys: superelastic behavior 19Conversion of single-variant martensite into austenite (S ! A)Similarly to the above, we introduce a Drucker-Prager-type loading function:F SA(� ; T ) = ktk+ 3� p� CSATwhere CSA is a material parameter. Generalizing the 1D-1 model (equations12-16), the initial and �nal transformation function can be expressed as:F SAs = F SA � RSAsF SAf = F SA � RSAfwith: RSAs = 24�SAs 0@s23 + �1A� CSAT SAs 35RSAf = 24�SAf 0@s23 + �1A� CSAT SAf 35where �SAs , �SAf , T SAs , T SAf are all material parameters. We assume that theconditions for the conversion of single-variant martensite into austenite are:F SAs < 0 ; F SAf > 0 ; _F SA < 0 (38)and that the scaled transformation strain corresponding to the S ! A phasetransformation evolves as follows:_uSA = _�SAS NSA (39)where: NSA = ukuk (40)Recalling again the discussion on the 1D-1 model, for the evolution of the single-variant martensite fraction we may assume either an exponential form:_�SAS = HSA�SA�S _F SA�F SAf �2 (41)with �SA a material parameter, measuring the speed of the transformation, or alinear form: _�SAS = HSA�S _F SAF SAf (42)The scalar parameter HSA embeds the conditions for the phase transformation(equation 38) and it is de�ned by the relation:HSA = ( 1 if F SAs < 0 ; F SAf > 0 ; _F SA < 00 otherwise (43)FA & RLT & JL CMAME 146 (1997) 281-312 Section 4

Shape-memory alloys: superelastic behavior 20For later developments, we note that the conversion of martensite into austeniteis associated only with a rescaling of the transformation strain u.Single-variant martensite reorientation process (S ! S)To model the single-variant martensite reorientation process for non-proportionalchanges of stress (changes of direction or rotation), we set:F SS = ktk+ 3�p� CSSTF SSs = F SS � RSSswith: RSSs = 24�SSs 0@s23 + �1A� CSST SSs 35 (44)where CSS, �SSs and T SSs are material parameters. We assume that the conditionfor the activation of the reorientation process are:F SSs > 0 ; _NSS 6= 0 (45)where: NSS = MSSkMSSk , MSS = @F SS@�and that the scaled transformation strain corresponding to the S ! S phasetransformation evolves as follow:_uSS = HSS�S _NSS (46)where: HSS = ( 1 if F SSs > 00 otherwise (47)Additional considerationsFrom a physical point of view it seems plausible that whenever the material hasenough energy to induce a conversion of austenite into single-variant martensite,then it has also enough energy to reorient the martensite fraction already present.Hence, we set CAS = CSS and RASs = RSSs , such that FASs = F SSs . Moreover,recalling the expression for FAS and F SS, we have:MAS =MSS = tktk + �1 =M (48)NAS =NSS = 11 + 3� tktk + �1! =N (49)We can now integrate the rate equations for the scaled transformation strain,obtaining the following equation: u = �S N̂ (50)FA & RLT & JL CMAME 146 (1997) 281-312 Section 4

Shape-memory alloys: superelastic behavior 21where N̂ is the current value of N if HSS = 1, otherwise it is equal to the lastvalue of N attained when HSS was equal to 1. Consistency of equation 50 withthe rate form can be checked computing its time derivative and considering thetwo cases HSS = 1 and HSS = 0:� If HSS = 1, then N̂ = N and, by equation 50, u is in the direction of N .From equation 40 we may conclude that NSA = N . Hence, the rate formof equation 50 returns:_u = _�SN + �S _N= � _�ASS + _�SAS �N + �S _Nwhich is exactly equal to the sum of the three transformation strain rateequations 35, 39 and 46.� If HSS = 0, then HAS = 0 and only HAS can be non zero. Moreover, sinceHSS = 0, N̂ is �xed. Hence, the rate form of equation 50 returns:_u = _�ASS N̂Recalling the de�nition of N̂ and that the S ! A phase transformation isa rescaling of u, we have that N̂ = u=kuk, from which we obtain equation39.Remark 4.3 Due to the particular form of N , the condition _N 6= 0 requiredfor the reorientation process to be active (equation 46) reduces to:[I � n n] _t 6= 0where n = t=ktk and I is the fourth-order identity tensor. Hence, the reorienta-tion process occurs only for non-radial changes of the deviatoric stress.4.3.3 Model reviewDue to the Drucker-Prager-type loading functions, we split the transformationstrain u into the volumetric and the deviatoric component:u = v + �w3 � 1 ; w = tr(u) (51)with tr(�) being the trace operator. The constitutive equation 50 for the trans-formation strain u can also be split into volumetric and deviatoric parts:w = 3� �S (52)v = �S m (53)FA & RLT & JL CMAME 146 (1997) 281-312 Section 4

Shape-memory alloys: superelastic behavior 22wherem is the deviatoric part of N̂ . The martensite fraction evolution representsthe only part of the model still in rate form:_�S = _�ASS + _�SAS (54)For the exponential case we have:_�ASS = HAS�AS(1� �S) _FAS�FASf �2 (55)_�SAS = HSA�SA �S _F SA�F SAf �2 (56)while for the linear case we have:_�ASS = �HAS(1� �S) _FASFASf (57)_�SAS = +HSA�S _F SAF SAf (58)with the usual de�nitions for HAS and HSA (equations 37 and 43).4.3.4 Material-parameter specialization to uniaxial statesThe model presented so far is in a three-dimensional context. Accordingly, thematerial parameters involved in the constitutive equations are relative to a three-dimensional setting.If the model is specialized to the case of uniaxial states of stress and strain,then the constitutive equations should involve the corresponding one-dimensionalquantities, which are indicated herein with a superposed tilde and which may beeasily computed from the corresponding three-dimensional parameters throughthe relations: �AS = ~�AS 0@s23 + �1A�SA = ~�SA0@s23 + �1A�L = ~�L=0@s23 + �1AThe material parameters used for the numerical examples are always expressed interms of the one-dimensional quantities since they have a more clear experimentalinterpretation.FA & RLT & JL CMAME 146 (1997) 281-312 Section 4
Shape-memory alloys: superelastic behavior 235 Time-discrete isothermal models and algorith-mic implementationsThis section describes a time-discrete isothermal version of the three-dimensional3D-1 model presented in Section 4.3. The algorithmic implementation of themodel within a �nite-element framework and the form of the consistent tangenttensor are discussed in detail. The discussion is limited only to a small deforma-tion regime.While during the development of the time-continuous model (Section 4.3) weassumed stress and temperature as control variables, during the development ofthe isothermal time-discrete models we assume the strain as the only controlvariable. This choice is consistent with the fact that, from the point of view ofintegration scheme, the time-discrete problem is considered strain-driven. Ac-cordingly, we consider two time values, say tn and tn+1 > tn, such that tn+1 is the�rst time value of interest after tn. Then, knowing the strain at time tn+1 and thesolution at time tn, we should compute the new solution at time tn+1. To min-imize the appearance of subscripts (and to make the equations more readable),we introduce the convention:an = a(tn) ; a = a(tn+1)where a is any generic quantity. Therefore, the subscript n indicates a quantityevaluated at time tn, while no subscript indicates a quantity evaluated at timetn+1. We now consider a time-discrete isothermal version of the 3D-1 model underthe assumption of small deformations.5.1 Kinematics and elastic constitutive equationLimiting the discussion to a small deformation setting, we additively decomposethe total strain � into an elastic part, �e, and a transformation part, �tr:� = �e + �tr (59)where, recalling equation 31: �tr = �Lu (60)We choose a free-energy function quadratic in the elastic strain: = (�e) = 12�eDe�e (61)where De is the fourth-order rank elastic modulus tensor. Accordingly, the stress� is given by: � = @ @� = De�e =De(�� �Lu) (62)FA & RLT & JL CMAME 146 (1997) 281-312 Section 5
Shape-memory alloys: superelastic behavior 24Recalling the Drucker-Prager form of the loading functions and the hypothesis ofisotropy (see Section 4.1 for a discussion) and assuming the elastic tensorD to beconstant and isotropic, it is convenient to split equations 59, 60 and 62 into thevolumetric and the deviatoric components. Using the notation of Section 4.3.3,we have: � = e� �31 (63)�e = ee � �e3 1 (64)e = ee + �L �S m (65)� = �e + 3� �L �S (66)and: p = K �e = K (� � �Lw) (67)t = 2G ee = 2G (e� �Lv) (68)where K is the bulk modulus and G is the shear modulus.5.2 Time-discrete modelUsing a backward-Euler integration formula, the discrete forms of equations 52-54are given by: w = 3� �S (69)v = �S m (70)�S = �S;n + ��ASS + �SAS � (71)where: �ASS = Z tn+1tn _�ASS dt (72)�SAS = Z tn+1tn _�SAS dt (73)Similarly, using a backward-Euler scheme to integrate the time-continuous evolu-tionary equations yields the corresponding time-discrete evolutionary equations.Written in residual form and after clearing fractions, the time-discrete evolution-ary equations specialize to:RAS = �FASf �2 �ASS �HAS�AS(1� �S) �FAS � FASn � = 0 (74)RSA = �F SAf �2 �SAS �HSA�SA �S �F SA � F SAn � = 0 (75)FA & RLT & JL CMAME 146 (1997) 281-312 Section 5

Shape-memory alloys: superelastic behavior 25for the exponential case (equations 55-56), while for the linear case (equations57-58) they specialize to:RAS = FASf �ASS +HAS(1� �S) �FAS � FASn � = 0 (76)RSA = F SAf �SAS �HSA �S �F SA � F SAn � = 0 (77)The quantities �ASS and �SAS can be computed expressing FAS and F SA as func-tions of �ASS and �SAS and requiring the satisfaction of RAS and RSA.5.3 Integration algorithm for the time-discrete modelA return-map algorithm is used as the integration scheme for the time-discretemodel. Initially suggested by Maenchen and Sack [28] and Wilkins [50] for thesolution of plasticity formulations, the return map provides an e�cient and robustintegration scheme based on a discrete enforcement of the evolutionary equations[41, 42]. It belongs to the family of elastic-predictor/inelastic-corrector algorithmsand, hence, is a two-part algorithm. In the �rst part, a purely elastic trial stateis computed; in the second part, if the trial state violates the constitutive model,an inelastic correction is computed using the trial state as an initial condition.The details of the algorithm for the time-discrete model proposed here are:1. Trial state.Assume that no phase transformations occur (i.e. w = wn, v = vn, �S =�S;n, �ASS = �SAS = 0). Accordingly, compute the trial pressure and the trialdeviatoric part of the stress:pTR = K(� � �Lwn)tTR = 2G (e� �Lvn)2. Check reorientation process (S ! S).Compute F SSsIf F SSs > 0 thenset HSS = 1update w, m and vrecompute pTR and tTRelse set HSS = 0end if3. Check solutions with �S = 0 and �S = 1.Compute FAS����S=1 and F SA����S=0If FAS����S=1 > RASf thenFA & RLT & JL CMAME 146 (1997) 281-312 Section 5

Shape-memory alloys: superelastic behavior 26�S = 1 is the appropriate solutionsolution foundset HAS = 1else �S = 1 is not the appropriate solutionend ifIf F SA����S=0 < RSAf then�S = 0 is the appropriate solutionsolution foundelse �S = 0 is not the appropriate solutionend ifIf solution found then skip to 74. Check A! S transformation.Compute FAS, FASs and FASnIf FASs > 0, FAS > FASn and �S;n < 1 thenset HAS = 1else set HAS = 0end if5. Check S ! A transformation.Compute F SA, F SAs and F SAnIf F SAs < 0, F SA < F SAn and �S;n > 0 thenset HSA = 1else set HSA = 0end if6. Compute martensite evolution.If HAS = 1 or HSA = 1 thencompute �ASS and �SASupdate �S, v, w, p and tend if7. Compute algorithmic tangent.If HAS = 1 or HSA = 1 or HSS = 1 thencompute algorithmic inelastic tangentelse compute elastic tangentend ifRemark 5.1 Step 6 is performed solving equations 74-75 or equations 76-77FA & RLT & JL CMAME 146 (1997) 281-312 Section 5

Shape-memory alloys: superelastic behavior 27using a Newton-type iterative algorithm:8><>: ��ASS �k+1��SAS �k+1 9>=>; = 8><>: ��ASS �k��SAS �k 9>=>;�R�18><>: �RAS�k�RSA�k 9>=>; (78)where: R�1 = 2664 @RAS@�ASS @RAS@�SAS@RSA@�ASS @RSA@�SAS 3775�1 = " a bc d #�1 = " B CD E # (79)and the superscript k indicates the iteration index.5.4 Algorithmic tangentIn the following we address the construction of the tangent matrix consistentwith the time-discrete model. The use of a consistent tangent tensor preserves thequadratic convergence of the Newton method, which we adopt for the incrementalsolution of the momentum equations from a �nite-element scheme.Linearizing equations 67-71, we get:dp = K(d� � �Ldw)dt = 2G(de� �Ldv)dw = 3� �d�ASS + �SAS �dv = �d�ASS + d�SAS �m+HSS�SdnWe need to compute dn only for the case HSS = 1. When HSS = 1, t, e and vare all in the same direction (equation 68); hence:n = tktk = ekekIn Reference [2] we show that:dn = d tktk! = d ekek! = 1kek [I � n n] dewhere: kek = ktk=(2G) + �L�Sand I is the fourth-order identity tensor. Using these results in the linearizedelastic relations, we get:dp = Kd� � 3K ��L �d�ASS + d�SAS �dt = 2G "I �HSS �L�S 1kek (I � n n)# de� 2G�L �d�ASS + d�SAS �mFA & RLT & JL CMAME 146 (1997) 281-312 Section 5

Shape-memory alloys: superelastic behavior 28The scalar quantities d�ASS and d�SAS are computed from the linearization of thediscrete-time evolutionary equations (equations 74-75 for the exponential modeland equations 76-77 for the linear model) as function of �, �ASS and �SAS . Accord-ingly: dRAS = @RAS@�ASS d�ASS + @RAS@�SAS d�SAS + @RAS@� : d� = 0dRSA = @RSA@�ASS d�ASS + @RSA@�SAS d�SAS + @RSA@� : d� = 0which can be written as:R( d�ASSd�SAS ) = �8><>: @RAS@� : d�@RSA@� : d� 9>=>; (80)For the particular models presented here, we have:@RAS@� = @RAS@FAS @FAS@�@RSA@� = @RSA@F SA @F SA@�and: @FAS@� = 2Gn+ 3�k1@F SA@� = 2Gn+ 3�k1Thus, using the expression for R�1 from equation 79, we can solve the system 80in terms of d�ASS and d�SAS :d�ASS = �TAS1 n+ TAS2 1� : d�d�SAS = �T SA1 n+ T SA2 1� : d�where: TAS1 = 2G �BAAS + CASA�TAS2 = 3k� �BAAS + CASA�T SA1 = 2G �DAAS + EASA�T SA2 = 3k� �DAAS + EASA�FA & RLT & JL CMAME 146 (1997) 281-312 Section 5

Shape-memory alloys: superelastic behavior 29and: AAS = �@RAS@FASASA = �@RSA@F SAFinally, we obtain: d� = D d�where: D = [K? (1 1) + 2G? Idev +M?1 (n n)�M?2 (m n)�M?3 (m 1)�M?4 (1 n)] (81)with: K? = K n1� 3�L � �TAS2 + T SA2 �o2G? = 2G (1�HSS�L �S 1kek)M?1 = HSS 2G �L �S 1kekM?2 = 2G �L �TAS1 + T SA1 �M?3 = 2G �L �TAS2 + T SA2 �M?4 = 3K � �L �TAS1 + T SA1 �5.5 Specialization to linear and exponential ow rulesWe now consider how some of the quantities previously introduced specialize forthe case of linear and exponential ow rules. First of all, we note that:@FAS@�ASS = @FAS@�SAS = h2G (n :m) + 9K�2i �L = G1@F SA@�ASS = @F SA@�SAS = h2G (n :m) + 9K�2i �L = G1Accordingly, for the linear ow rule, we have:a = @RAS@�ASS = �G1�ASS � h�FAS � FASn �+ (1� �S)G1i+ FASfb = @RAS@�SAS = �G1�ASS � h�FAS � FASn �+ (1� �S)G1ic = @RSA@�ASS = �G1�SAS � h�F SA � F SAn �� �SG1id = @RSA@�SAS = �G1�SAS � h�F SA � F SAn �� �SG1i + F SAfFA & RLT & JL CMAME 146 (1997) 281-312 Section 5
Shape-memory alloys: superelastic behavior 30and: AAS = �@RAS@FAS = ��ASS � (1� �S)ASA = �@RAS@FAS = ��SAS + �SFor the exponential ow rule, we have:a = @RAS@�ASS = �AS �FAS � FASn �+G1 h�AS (1� �S)� 2�ASS FASf i+ �FASf �2b = @RAS@�SAS = �AS �FAS � FASn �+G1 h�AS (1� �S)� 2�ASS FASf ic = @RSA@�ASS = ��SA �F SA � F SAn �+G1 h�SA�S � 2�SAS F SAf id = @RSA@�SAS = ��SA �F SA � F SAn �+G1 h�SA�S � 2�SAS F SAf i+ �F SAf �2and: AAS = �@RAS@FAS = �2�ASS FASf + �AS(1� �S)ASA = �@RAS@FAS = �2�SAS F SAf + �SA�S
FA & RLT & JL CMAME 146 (1997) 281-312 Section 5

Shape-memory alloys: superelastic behavior 315.6 Test examplesWe now present some simple numerical examples to show the performance of thediscrete model and of the algorithmic implementation discussed above. All thesimulations presented are obtained by employing the exponential ow rule. Wechoose the following material parameters:E = 1000 MPa ; CAS = CSA = 1 MPa/oC�L = 10% ; �AS = �SA = 10 MPaTASf = 10 oC ; TASs = 70 oC ; T SAs = 90 oC ; T SAf = 130 oCThe parameter � is set equal to zero unless otherwise stated.Uniaxial (proportional) stress cyclesWe consider a specimen undergoing a uniaxial (proportional) loading-unloadinghistory. Recalling the discussion on the 1D-1 model, for such a loading history itis possible to compute a closed-form solution which can be useful to evaluate theaccuracy of the discrete solution obtained by the �nite-element scheme. In Figure11 the stress-strain response is plotted for di�erent values of the integration timestep. Each integration time step corresponds to a di�erent but constant strainstep since the specimen is loaded controlling the displacements. Figure 11 showthat the algorithmic response converges to a stable solution as the integrationtime step reduces and that an acceptable solution can be obtained also for largetime steps.The response of the model to uniaxial tension-compression tests is presentedin Figure 12 for di�erent values of the parameter �. The parameter � is computedfrom the initial value of the AS phase transformation in tension, ��ASs �T , andcompression, ��ASs �C from the relation:� = s23 ��ASs �C � ��ASs �T(�ASs )C + (�ASs )T (82)Biaxial (non-proportional) stress cyclesTo test the model during a non-proportional stress cycle, we consider a biaxialloading condition. The specimen is constrained to obtain zero strain along onedirection (x1) and is loaded controlling the strain along a second direction (x2,orthogonal to x1). Along a third direction (x3, orthogonal to the two previousones) the specimen is free; hence, the stress is zero. This represents the behaviorof a at sheet (Figure 13) free in the thickness direction (x3) and restrainedalong the boundaries parallel to one of the in-plane directions (x1). During theloading-unloading history the direction of the stress tensor varies, reproducing aFA & RLT & JL CMAME 146 (1997) 281-312 Section 5

Shape-memory alloys: superelastic behavior 32non-proportional loading; hence, the reorientation process of the single-variantmartensite is active.The stress responses along the x1 and the x2 directions versus the strain alongthe x2 direction is plotted in Figure 14. The ability of the model to reproducethe superelastic behavior also for multiaxial non-proportional loading history canbe easily asserted.Luders bandsDuring the uniaxial testing of a shape-memory alloy bar, the presence of Ludersbands is commonly noticed. The phase transformation is, in fact, observed tostart in a localized zone of the specimen (in general one of the two ends) andto progressively propagate within the specimen, while maintaining a well de�nedinterface between the austenite and the martensite. We believe that the Luders-band e�ect is initiated by small variations in the homogeneity of the bar.To model this e�ect, we consider a bar of length L = 100 mm and normalarea 1 mm2. The bar is loaded uniaxially as described in Figure 15. To representa geometric nonhomogeneity, the bar is assumed to be slightly tapered so as toinitiate the transformation at the loaded end [ we set: (A0 � A1)=A0 = 10�4,where A0 is the area at the built-in end and A1 is the area at the loaded end]. InFigure 16 we plot the displacement of several points along the bar versus time.The presence of a moving boundary can be clearly detected from the di�erence ofthe responses; hence, the proposed model is able to reproduce the Luders-bande�ect.
FA & RLT & JL CMAME 146 (1997) 281-312 Section 5

Shape-memory alloys: superelastic behavior 336 Finite-element simulation of shape-memory-alloy devicesWe now want to assess our ability to perform simulations for typical SMA-baseddevices exploiting the superelastic behavior.The experimental data as well as the specimen speci�cations were providedby Dr. A.R. Pelton and Dr. T.W. Duerig of Nitinol Device & Components, Inc.7. The material adopted is a standard binary Ni-Ti alloy with composition:Element Ni Ti O C Hweight-% 55.5 44.4 0.026 0.053 0.000016atomic-% 50.8 49.2 0.087 0.237 0.0085A detailed description of the material and its manufacturing aspects can be foundin Reference [49].6.1 Material-parameter characterizationThe �rst step is to properly identify the parameters to use in the material con-stitutive model. To do so, we consider the results from uniaxial tension testsperformed on a circular wire of diameter D = 1:49 mm. The test procedure isdescribed in Reference [49].Two uniaxial tension tests were performed controlling the displacements. Inthe �rst test, a simple loading-unloading history was applied to the specimenreaching a maximum 8% strain. The stress-strain response is reported in Figure17. The test was designed to give some general information on the regions andthe kinetics of the phase transformations. In the second test, a multiple loading-unloading history was applied to the specimen reaching a maximum 2% strain.The stress-strain response is reported in Figure 18. The test was designed to givemore information on the elastic properties of the parent phase (austenite) and onthe starting value of the forward phase transformation (conversion of austeniteinto single-variant martensite).From the inspection of the experimental stress-strain curves the followingmaterial parameters are chosen for both the exponential and the linear model:E = 60000 MPa ; � = 0:3 ; ~�L = 7:5%TASs = TASf = 0 oC ; CAS = 0 MPa/oCT SAs = T SAf = 0 oC ; CSA = 0 MPa/oC7Nitinol Device & Components, Inc., 48501 Warm Spring Blvd., Fremont, 94539 CA, USAFA & RLT & JL CMAME 146 (1997) 281-312 Section 6

Shape-memory alloys: superelastic behavior 34For the exponential model we also set:�ASs = 520 MPa ; �ASf = 750 MPa ; ~�AS = 250 MPa�SAs = 550 MPa ; �SAf = 200 MPa ; ~�SA = 20 MPawhile for the linear model we set:�ASs = 520 MPa ; �ASf = 600 MPa�SAs = 300 MPa ; �SAf = 200 MPaThe stress-strain responses simulated using the exponential and the linear modelsare reported respectively with dash-dot and dash-dash lines in Figures 19-20;a good match with the experimental data can be observed, especially for theexponential model. A better match could be obtained modeling the di�erencein elastic properties between the austenite and the martensite as well as througha more careful choice of the material parameters (for example, using a least-square algorithm minimizing the di�erence between the experimental data andthe numerical solutions). These aspects will be addressed in future work.Due to the limited number of tension tests available, it is not possible to accu-rately assess the maximum deformation obtainable by detwinning of the multiple-variant martensite (~�L), the starting and �nal values of the reverse transformationas well as the di�erence between the elastic properties of the austenite and themartensite. Accordingly, the values chosen for these parameters are quite arbi-trary.Due to the limitation in the experimental facilities, it was also not possi-ble to obtain experimental data for tests di�erent than uniaxial tension or non-proportional loading tests. Thus, it is not possible to determine the di�erencein material response between tension and compression from experimental data.From consideration relative to a Ni-Ti-10%Cu alloy [22] the parameter � is setequal to 0.15.6.2 Four-point bending testA four-point bending test was performed on a wire of circular cross section withdiameter D = 1:49 mm. The test procedure is described in Reference [49].The setting of the test is idealized in Figure 21. The beam is simply supportedon rollers, sitting at a �xed distance L = 20 mm. The output parameters recordedduring the experiments are the load F and the bottom �ber de ection of the beammiddle-span section.Due to symmetry conditions only half of the half-span beam needs to bestudied. For the numerical simulations we use the mesh presented in Figure22. In Figure 23 the plotted load-de ection curves are computed using both theexponential and the linear model. The experimental load-de ection curve is alsoreported. From the inspection of the �gures it is possible to conclude that:FA & RLT & JL CMAME 146 (1997) 281-312 Section 6
Shape-memory alloys: superelastic behavior 35� The predicted load-de ection curves match quite well the experimentaldata, except in the part of the curve corresponding to the �nal unload-ing portion. The size of the predicted hysteresis loop also slightly di�ersfrom the one found experimentally.� The exponential and the linear models predict similar results, except in thepart of the curve corresponding to the initial unloading portion.6.3 Three-point bending testA three-point bending test was performed on the same wire and with the sametest procedure used for the four-point bending test [49]; the setting of the test isidealized in Figure 24. The wire has again a circular cross section with diameterD = 1:49 mm; the beam is simply supported on rollers, sitting at a �xed distanceof length L = 20 mm. The output parameters recorded during the experimentsare the load F and the bottom �ber de ection of the beam middle-span section.Due to symmetry conditions only half of the half-span beam needs to bestudied. For the numerical simulations we use the mesh presented in Figure22. In Figure 25 the plotted load-de ection curves are computed using both theexponential and the linear model. The experimental load-de ection curve is alsoreported. From the inspection of the �gures it is possible to conclude that:� The predicted load-de ection curves match quite well the experimentaldata, except in the part of the curve corresponding to the �nal loadingportion (peak load).� It is signi�cantly di�erent from the four-point bending test the fact that wenow predict well the part of the curve corresponding to the �nal unloadingand the size of the hysteresis loop.� The exponential and the linear models predict again similar results.6.4 Considerations on the simulationsFrom all the analyses presented we may conclude that:� The di�erent material behavior in tension and compression has to be takeninto account during the modeling of shape-memory materials.� Both the exponential and the linear models have a good ability to properlyreproduce uniaxial tension tests, the former showing better matches withthe available experimental data.� The exponential and the linear models give comparable results in termsof global response parameters (for example, in terms of load-displacementscurves).FA & RLT & JL CMAME 146 (1997) 281-312 Section 6

Shape-memory alloys: superelastic behavior 36� Both the exponential and the linear models produces results which are ingood agreement with available experimental data for the case of four- andthree-point bending tests.� The discussed framework can be used to study the global and the localresponse of structures with complex geometry and it can be used to obtainvaluable design informations.Based on the overall simulation presented, we may conclude that the proposedapproach is a viable basis for an e�ective computational tool to be used in thesimulation of shape-memory-alloy devices.
FA & RLT & JL CMAME 146 (1997) 281-312 Section 6

Shape-memory alloys: superelastic behavior 377 Closure and future research directionsThe present work proposes an initial plausible development of a computationtool to be used during the design of SMA-based devices. To reach this goal,one- and three-dimensional thermomechanical constitutive models are developed,using an internal-variable inelastic framework able to describe solid-solid phasetransformations.The internal variables are chosen between a scalar variable (the martensiticfraction) and one second-order tensor variable (the transformation strain). Alinear-type and an exponential ow rules for the internal variables are discussed.The proposed constitutive models reproduce some of the basic features ofshape-memory alloys, such as superelasticity, di�erent material behavior in ten-sion and compression, and the single-variant-martensite reorientation process.For an isothermal case we discuss in detail the numerical implementationwithin a �nite-element scheme for both the case of small- and large-deformationregimes.To assess the viability of the proposed approach we simulate the responseof some simple SMA typical structures (uniaxial test, four-point bending test,three-point bending test) for which experimental data are available. From thesimulations it is possible to evince that the proposed framework:� produces results which are in good agreement with the experimental data,� can be used to study devices with di�erent geometry and/or material prop-erties,� is able to give valuable local information such as displacement and/or stress-strain histories.The match between the experimental and the predicted data are good, espe-cially considering that the parameters used in the constitutive model have beenextrapolated on the basis of only two tension tests.The overall discussion leads us to conclude that the proposed approach is aplausible initial development of an e�ective computational tool for the simula-tion of SMA-based devices. However, additional research and developments areneeded in order to obtain a fully general and reliable tool. From the modelingpoint of view the required extensions and improvements are:� extension of the isothermal time-discrete formulation to a large deformationregime� implementation of the complete thermomechanical model in a �nite-elementframework� more accurate assessment and modeling of the reorientation process for thesingle-variant martensitesFA & RLT & JL CMAME 146 (1997) 281-312 Section 7
Shape-memory alloys: superelastic behavior 38� modeling of the di�erent elastic properties of the austenite and the marten-site.All the proposed developments have to be followed by an experimental campaign,in order to better understand the material macroscopic behavior as well as thepossible interaction between the di�erent phase transformations.
FA & RLT & JL CMAME 146 (1997) 281-312 Section 7
Shape-memory alloys: superelastic behavior 39References[1] P.H. Adler, W. Yu, A.R. Pelton, R. Zadno, T.W. Duerig, and R. Barresi. On the tensile andtorsional properties of pseudoelastic Ni-Ti. Scripta Metallurgica et Materialia, 24:943{947,1990.[2] F. Auricchio. Shape memory alloys: applications, micromechanics, macromodeling andnumerical simulations. PhD thesis, University of California at Berkeley, 1995.[3] F. Auricchio and R.L. Taylor. Two material models for cyclic plasticity: non-linear kine-matic hardening and generalized plasticity. International Journal of Plasticity, 11:65{98,1995.[4] F. Auricchio, R.L. Taylor, and J. Lubliner. Application of a return map algorithm toplasticity models. In D.R.J. Owen and E. Onate, editors, COMPLAS ComputationalPlasticity: Fundamentals and Applications, pages 2229{2248, Barcelona, 1992.[5] E.C. Bain. Transaction AIME, 70:25, 1924.[6] W. B�uhrer, M. Zolliker, and R. Gotthardt. Crystal structures of the shape memory alloyNi-Ti: comments on recent publication in Acta Metall. Mater. Scripta Metallurgica etMaterialia, 26:1149{1151, 1992.[7] W.J. Buehler and R.C. Wiley. Nickel-based alloys. Technical report, 1965. US-Patent3174851.[8] A. Chrysochoos, M. Lobel, and O. Maisonneuve. Thermomechanical coupling of pseudoe-lastic behaviour of CuZnAl and NiTi alloys. Comptes Rendus de l'Academie des Sciences,Serie II, 320:217{223, 1995.[9] J.D. Chute and D.E. Hodgson. Eyeglass frame and SMA - the challenge and the product.In T.W. Duerig, K.N. Melton, D. St�okel, and C.M. Wayman, editors, Engineering aspectsof shape memory alloys, pages 420{425, 1990.[10] W.B. Cross, A.H. Kariotis, and F.J. Stimler. Technical report, 1969. NASA SP 1433.[11] M.A. Eisenberg and A. Phillips. A theory of plasticity with non-coincident yield andloading surfaces. Acta Mechanica, 11:247{260, 1971.[12] F. Falk and P. Konopka. Three-dimensional Landau theory describing the martensiticphase transformation of shape-memory alloys. Journal of Physics: Condensed Matter,2:61{77, 1990.[13] S. Fu, Y. Huo, and I. Muller. Thermodynamics of pseudoelasticity - an analytical approach.Acta Mechanica, 99:1{19, 1993.[14] H. Funakubo. Shape memory alloys. Gordon and Breach Science Publishers, 1987. trans-lated from the Japanese by J.B. Kennedy.[15] Y. Huo and I. Muller. Nonequilibrium thermodynamics of pseudoelasticity. ContinuumMechanics and Thermodynamics, 5:163{204, 1993.[16] C.M. Jackson, H.J. Wagner, and R.J. Wasilewski. 55-Nitinol{the alloy with a memory: itsphysical metallurgy, properties and applications. Technical report, 1972. NASA SP 5110.[17] T. Kakeshita, K. Shimizu, S. Nakamichi, R. Tanaka, S. Endo, and F. Ono. E�ect of hydro-static pressures on thermoelastic martensitic transformations in aged Ti-Ni and ausagedFe-Ni-Co-Ti shape memory alloys. Materials Transactions JIM, 33:1{6, 1992.[18] A.A. Likhachev and Yu.N. Koval. On the di�erential equation describing the hystereticbehavior of shape memory alloys. Scripta Metallurgica et Materialia, 27:223{227, 1992.FA & RLT & JL CMAME 143 (1997) 175-194 Bibliography

Shape-memory alloys: superelastic behavior 40[19] T.J. Lim and D.L. McDowell. Degradation of an Ni-Ti alloy during cyclic loading. InSmart Structures and Materials 1994. Smart Materials. Proceedings of the SPIE - TheInternational Society for Optical Engineering, volume 26, pages 326{341, 1994.[20] J. Lubliner. A maximum-dissipation principle in generalized plasticity. Acta Mechanica,52:225{237, 1984.[21] J. Lubliner. A simple model of generalized plasticity. International Journal of Solids andStructures, 28:769{778, 1991.[22] J. Lubliner and F. Auricchio. Generalized plasticity and shape memory alloys. Interna-tional Journal Solids and Structures, 1995. to be published.[23] J. Lubliner, R.L. Taylor, and F. Auricchio. A new model of generalized plasticity. Inter-national Journal of Solids and Structures, 30:3171{3184, 1993.[24] K. Madangopal and S. Banerjee. The self accomodating morphology of Ni-Ti shape mem-ory alloy martensite. Scripta Metallurgica et Materialia, 24:2291{2296, 1990.[25] K. Madangopal and S. Banerjee. The lattice invariant shear in Ni-Ti shape memory alloymartensites. Scripta Metallurgica et Materialia, 26:1627{1632, 1992.[26] K. Madangopal, J. Singh, and S. Banerjee. Self-accomodation in Ni-Ti shape memoryalloys. Scripta Metallurgica et Materialia, 25:2153{2158, 1991.[27] K. Madangopal, J. Singh, and S. Banerjee. The nature of self accomodation in Ni-Ti shapememory alloys. Scripta Metallurgica et Materialia, 29:725{728, 1993.[28] G. Maenchen and S. Sack. The tensor code. In B. Alder, editor, Methods in computationalphysics, volume 3, page 181. Academic Press, 1964.[29] G.A. Malygin. Kinetic model of superelastic deformation e�ects and of the shape memoryin martensitic transformations. Phy. Solid State, 35:66{71, 1993.[30] J.L. McNichols and Jr. J.S. Cory. Thermodynamics of Nitinol. Journal of Applied Physics,61:972{984, 1987.[31] K.N. Melton. Ni-Ti based shape memory alloys. In T.W. Duerig, K.N. Melton, D. St�okel,and C.M. Wayman, editors, Engineering aspects of shape memory alloys, pages 21{35,1990.[32] A. Melzer and D. St�okel. Performance improvement of surgical instrumentation throughthe use of Ni-Ti materials. In A.R. Pelton, D. Hodgson, and T. Duerig, editors, Proceedingsof the First International Conference on Shape Memory and Superelastic Technologies,pages 401{409, 1994.[33] S. Miyazaki, K. Otsuka, and C.M. Wayman. The shape memory mechanism associatedwith the martensitic transformation in Ti-Ni alloys - I. Self-accomodation. Acta Metallur-gica, 37:1873{1884, 1989.[34] S. Miyazaki, K. Otsuka, and C.M. Wayman. The shape memory mechanism associatedwith the martensitic transformation in Ti-Ni alloys - II. Variant coalescence and shaperecovery. Acta Metallurgica, 37:1885{1890, 1989.[35] I. Muller and H. Xu. On the pseudo-elastic hysteresis. Acta Metallurgica et Materialia,39:263{271, 1991.[36] J.P. O'Leary, J.E. Nicholson, and R.F. Gatturna. The use of Ni-Ti in the Homer Mam-malok. In T.W. Duerig, K.N. Melton, D. St�okel, and C.M. Wayman, editors, Engineeringaspects of shape memory alloys, pages 477{482, 1990.FA & RLT & JL CMAME 143 (1997) 175-194 Bibliography

Shape-memory alloys: superelastic behavior 41[37] A. Phillips. On rate-independent continuum theories of graphite and their experimentalveri�cation. Nuclear Engineering and Design, 18:203{211, 1972.[38] V. Raghavan. Kinetics of martensitic transformations. In G.B.Olson and W.S. Owen,editors, Martensite: a tribute to Morris Cohen, pages 197{225, 1992.[39] B. Raniecki and C. Lexcellent. RL-models of pseudoelasticity and their speci�cation forsome shape memory solids. European Journal of Mechanics, A/Solids, 13:21{50, 1994.[40] R.C.L. Sachdeva and S. Miyazaki. Superelastic Ni-Ti alloys in orthodontics. In T.W.Duerig, K.N. Melton, D. St�okel, and C.M. Wayman, editors, Engineering aspects of shapememory alloys, pages 452{469, 1990.[41] J.C. Simo. Topics on the numerical analysis and simulation of plasticity. In P.G. Ciarlet andJ.L. Lions, editors, Handbook of numerical analysis, volume III. Elsevier Science PublisherB.V. to appear.[42] J.C. Simo and T.J.R. Hughes. Elasto-plasticity and visco-plasticity: computational aspects.Springer-Verlag. to appear.[43] J. Stice. The use of superelasticity in guidewires and arthroscopic instrumentations. InT.W. Duerig, K.N. Melton, D. St�okel, and C.M. Wayman, editors, Engineering aspects ofshape memory alloys, pages 483{489, 1990.[44] Qing Ping Sun and Keh Chih Hwang. Micromechanics modelling for the constitutivebehavior of polycrystalline shape memory alloys. I. Derivation of general relations. Journalof the Mechanics and Physics of Solids, 41:1{17, 1993.[45] Qing Ping Sun and Keh Chih Hwang. Micromechanics modelling for the constitutivebehavior of polycrystalline shape memory alloys. II. Study of the individual phenomena.Journal of the Mechanics and Physics of Solids, 41:19{33, 1993.[46] I. Tamura and C.M. Wayman. Martensitic transformations and mechanical e�ects. InG.B.Olson and W.S. Owen, editors, Martensite: a tribute to Morris Cohen, pages 227{242, 1992.[47] K. Tanaka and R. Iwasaki. A phenomenological theory of transformation superplasticity.Engineering Fracture Mechanics, 21:709{720, 1985.[48] F.E. Wang. Proceeding of symposium of NiTi and related compounds. Technical report,1968. NOLTR 68-16.[49] A. Wick. The bending behavior of superelastic NiTi. Master's thesis, Universit�at Karlsruhe(TH), Institut f�ur Werksto�kunde I, 1994.[50] M.L. Wilkins. Calculation of elastic plastic ow. In B. Alder, editor, Methods in compu-tational physics, volume 3, page 211. Academic Press, 1964.
FA & RLT & JL CMAME 143 (1997) 175-194 Bibliography
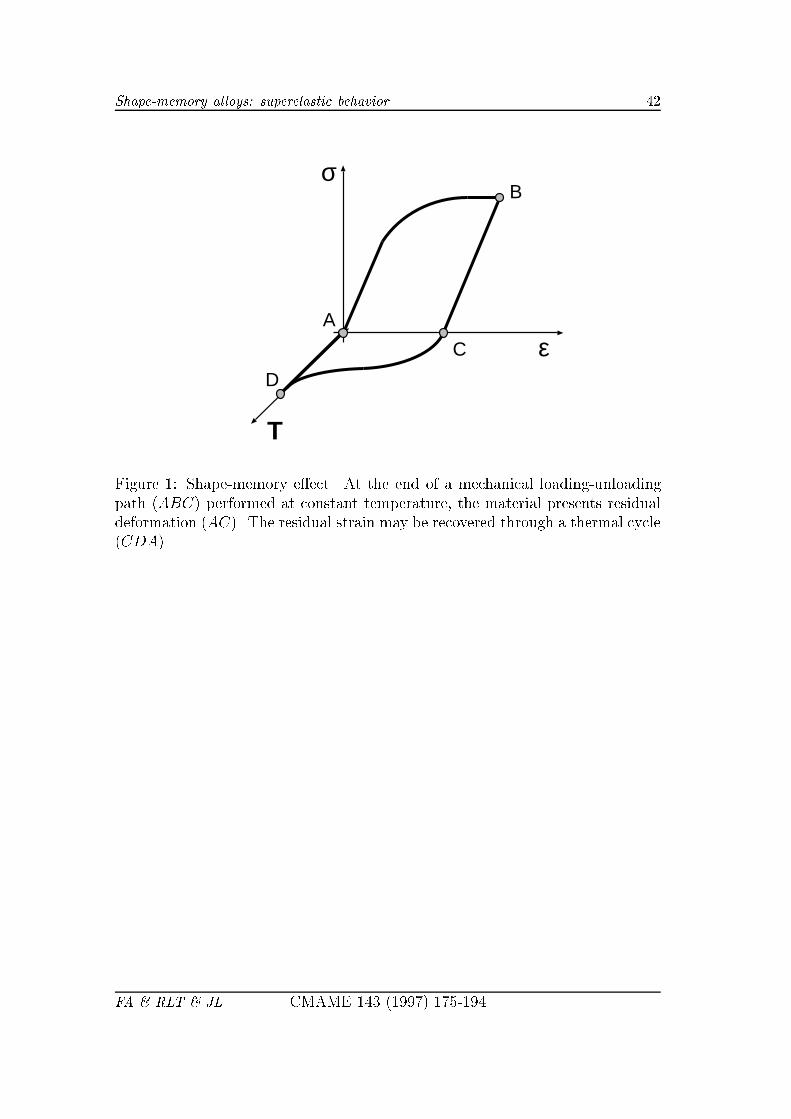
Shape-memory alloys: superelastic behavior 42σ
ε
T
B
A
C
D
Figure 1: Shape-memory e�ect. At the end of a mechanical loading-unloadingpath (ABC) performed at constant temperature, the material presents residualdeformation (AC). The residual strain may be recovered through a thermal cycle(CDA).
FA & RLT & JL CMAME 143 (1997) 175-194

Shape-memory alloys: superelastic behavior 43σ
εA
B
C
D
Figure 2: Superelasticity. At constant temperature the material is �rst loaded(ABC), showing a nonlinear behavior. When unloaded (CDA), the reverse trans-formation occurs, with zero �nal permanent strain. Note the hysteresis.Multiple variant martensite
Austenite
Figure 3: Twinned martensitic structure obtained to reduce the mis�t betweenthe austenite and the martensite phases.FA & RLT & JL CMAME 143 (1997) 175-194

Shape-memory alloys: superelastic behavior 44Single variant martensite
Austenite
Figure 4: Detwinned martensitic structure obtained when there is a preferreddirection for the formation of the martensite phase.
T
σ
T f
=0
1
AS T sAS
F fAS
=0F sAS
CAS
> 0FAS
Figure 5: 1D-1 model: production of single-variant martensite. The shaded arearepresents states where the phase transformation can occur. The arrow indicatesthe direction of activation.FA & RLT & JL CMAME 143 (1997) 175-194
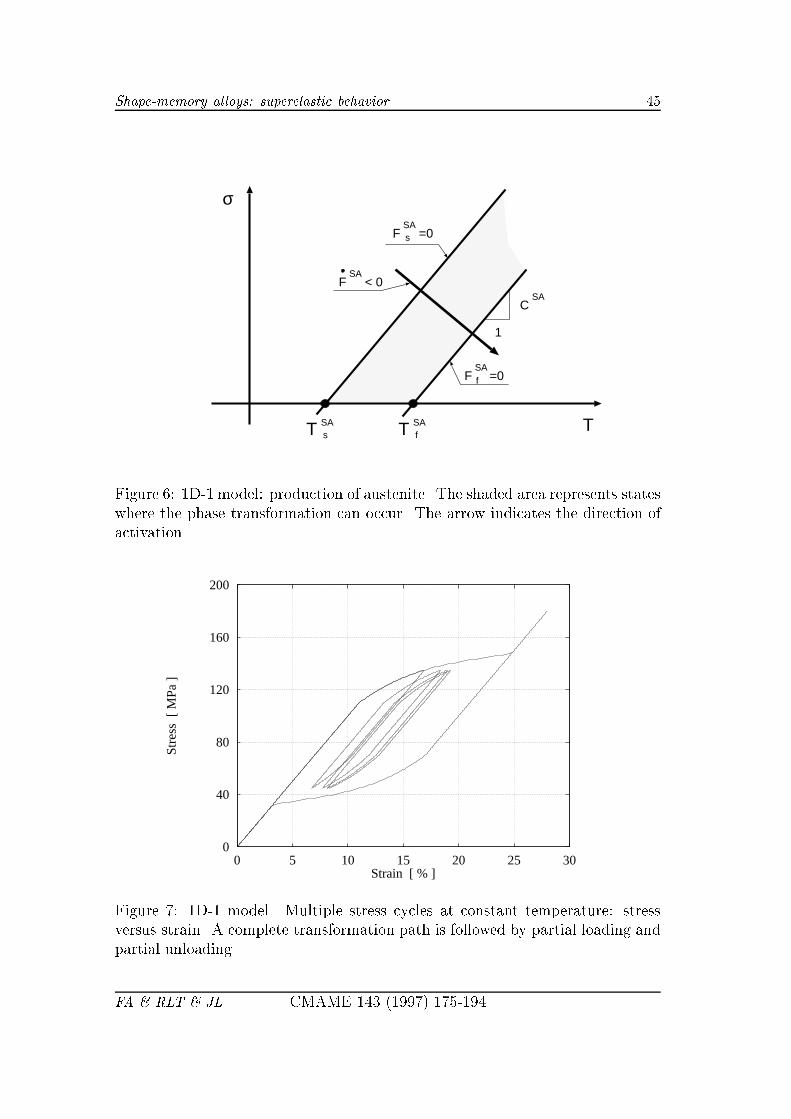
Shape-memory alloys: superelastic behavior 45
T
σ
T s
=0
1
SA T fSA
F sSA
=0F fSA
CSA
< 0FSA
Figure 6: 1D-1 model: production of austenite. The shaded area represents stateswhere the phase transformation can occur. The arrow indicates the direction ofactivation.
0
40
80
120
160
200
0 5 10 15 20 25 30
Stre
ss [
MPa
]
Strain [ % ]Figure 7: 1D-1 model. Multiple stress cycles at constant temperature: stressversus strain. A complete transformation path is followed by partial loading andpartial unloading.FA & RLT & JL CMAME 143 (1997) 175-194
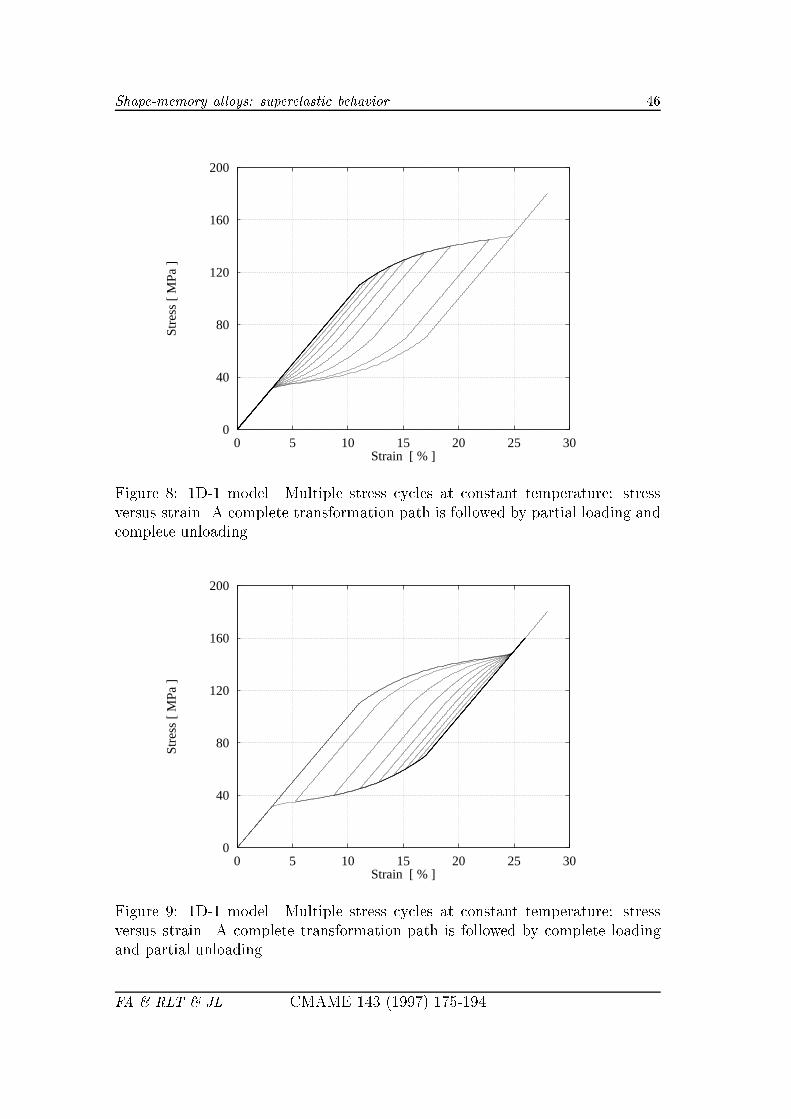
Shape-memory alloys: superelastic behavior 46
0
40
80
120
160
200
0 5 10 15 20 25 30
Stre
ss [
MPa
]
Strain [ % ]Figure 8: 1D-1 model. Multiple stress cycles at constant temperature: stressversus strain. A complete transformation path is followed by partial loading andcomplete unloading.
0
40
80
120
160
200
0 5 10 15 20 25 30
Stre
ss [
MPa
]
Strain [ % ]Figure 9: 1D-1 model. Multiple stress cycles at constant temperature: stressversus strain. A complete transformation path is followed by complete loadingand partial unloading.FA & RLT & JL CMAME 143 (1997) 175-194
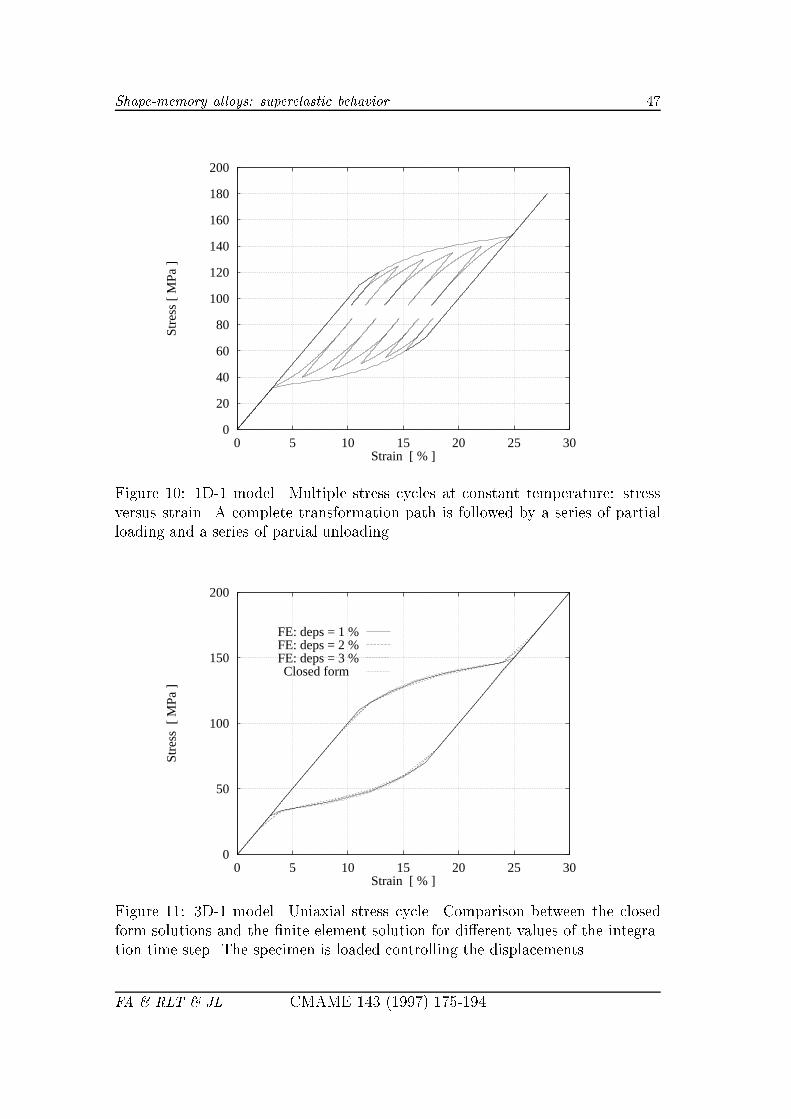
Shape-memory alloys: superelastic behavior 47
0
20
40
60
80
100
120
140
160
180
200
0 5 10 15 20 25 30
Stre
ss [
MPa
]
Strain [ % ]Figure 10: 1D-1 model. Multiple stress cycles at constant temperature: stressversus strain. A complete transformation path is followed by a series of partialloading and a series of partial unloading.
0
50
100
150
200
0 5 10 15 20 25 30
Stre
ss [
MPa
]
Strain [ % ]
FE: deps = 1 %FE: deps = 2 %FE: deps = 3 %Closed form
Figure 11: 3D-1 model. Uniaxial stress cycle. Comparison between the closedform solutions and the �nite-element solution for di�erent values of the integra-tion time step. The specimen is loaded controlling the displacements.FA & RLT & JL CMAME 143 (1997) 175-194

Shape-memory alloys: superelastic behavior 48
-200
-150
-100
-50
0
50
100
150
200
-30 -20 -10 0 10 20 30
Stre
ss [
MPa
]
Strain [ % ]
alpha= 0.00alpha= 0.13alpha=-0.10
Figure 12: 3D-1 model. Tension-compression cycles. Stress-strain responses.1
2
3
2
Figure 13: Non-proportional stress cycle: test problem.FA & RLT & JL CMAME 143 (1997) 175-194
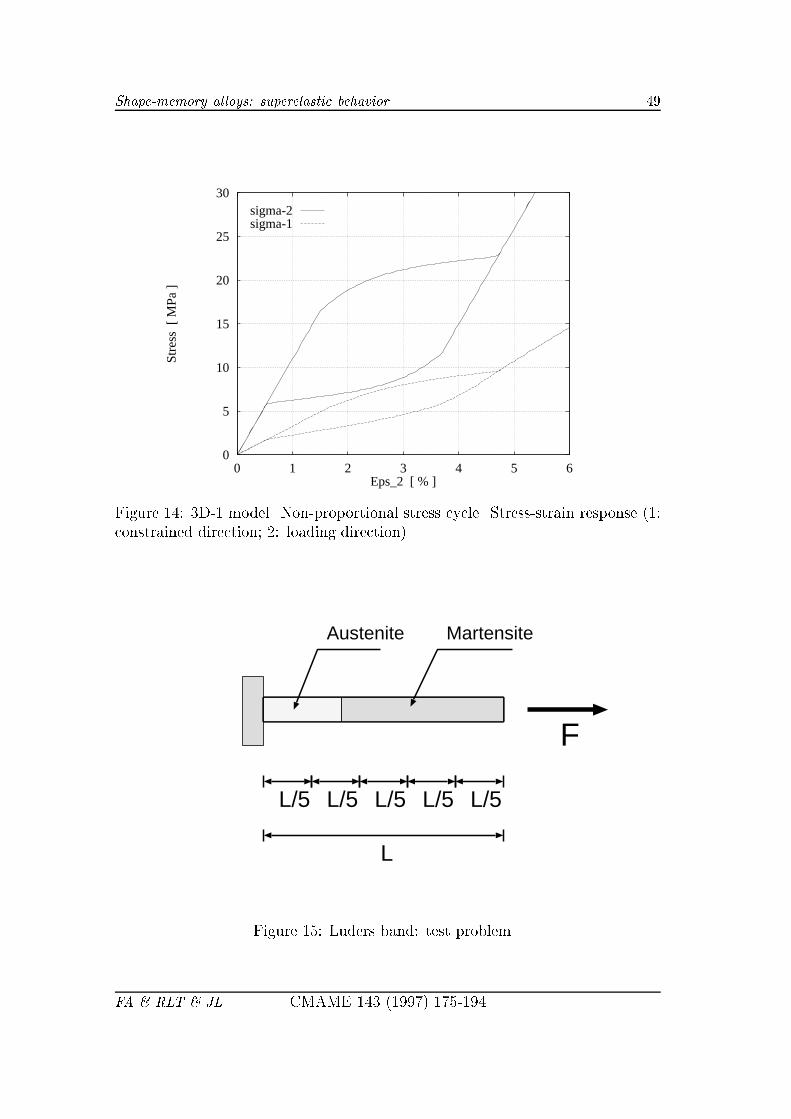
Shape-memory alloys: superelastic behavior 49
0
5
10
15
20
25
30
0 1 2 3 4 5 6
Stre
ss [
MPa
]
Eps_2 [ % ]
sigma-2sigma-1
Figure 14: 3D-1 model. Non-proportional stress cycle. Stress-strain response (1:constrained direction; 2: loading direction).
F
L/5 L/5 L/5 L/5 L/5
L
Austenite Martensite
Figure 15: Luders band: test problem.FA & RLT & JL CMAME 143 (1997) 175-194

Shape-memory alloys: superelastic behavior 50
0
500
1000
1500
2000
2500
3000
0 0.5 1 1.5 2 2.5 3
Dis
plac
emen
t
Time
Trace moving bound.u(5/5*L)u(4/5*L)u(3/5*L)u(2/5*L)u(1/5*L)
Figure 16: 3D-1 model. Simulation of the Luders-band e�ect. The presence of amoving interface boundary can be detected from the di�erences of the displace-ments in time.
0 1 2 3 4 5 6 7 80
100
200
300
400
500
600
700
Strain [ % ]
Str
ess
[ M
Pa
]
Figure 17: Material-parameter characterization. Uniaxial tension stress-strainresponse for a Ni-Ti alloy. Experimental data.FA & RLT & JL CMAME 143 (1997) 175-194

Shape-memory alloys: superelastic behavior 51
0 0.5 1 1.5 20
100
200
300
400
500
600
Strain [ % ]
Str
ess
[ M
Pa
]
Figure 18: Material-parameter characterization. Cyclic uniaxial tension stress-strain response for a Ni-Ti alloy. Experimental data.
Experimental data
FE: expon. model
FE: linear model
0 1 2 3 4 5 6 7 80
100
200
300
400
500
600
700
Strain [ % ]
Str
ess
[ M
Pa
]
Figure 19: Material-parameter characterization. Uniaxial tension stress-strainresponse for a Ni-Ti alloy. Comparison between experimental data and numericalresults.FA & RLT & JL CMAME 143 (1997) 175-194

Shape-memory alloys: superelastic behavior 52
Experimental data
FE: expon. model
FE: linear model
0 0.5 1 1.5 20
100
200
300
400
500
600
Strain [ % ]
Str
ess
[ M
Pa
]
Figure 20: Material-parameter characterization. Cyclic uniaxial tension stress-strain response for a Ni-Ti alloy. Comparison between experimental data andnumerical results.F F
L
L/3 L/3 L/3
Figure 21: Four-point bending test: test problem.FA & RLT & JL CMAME 143 (1997) 175-194
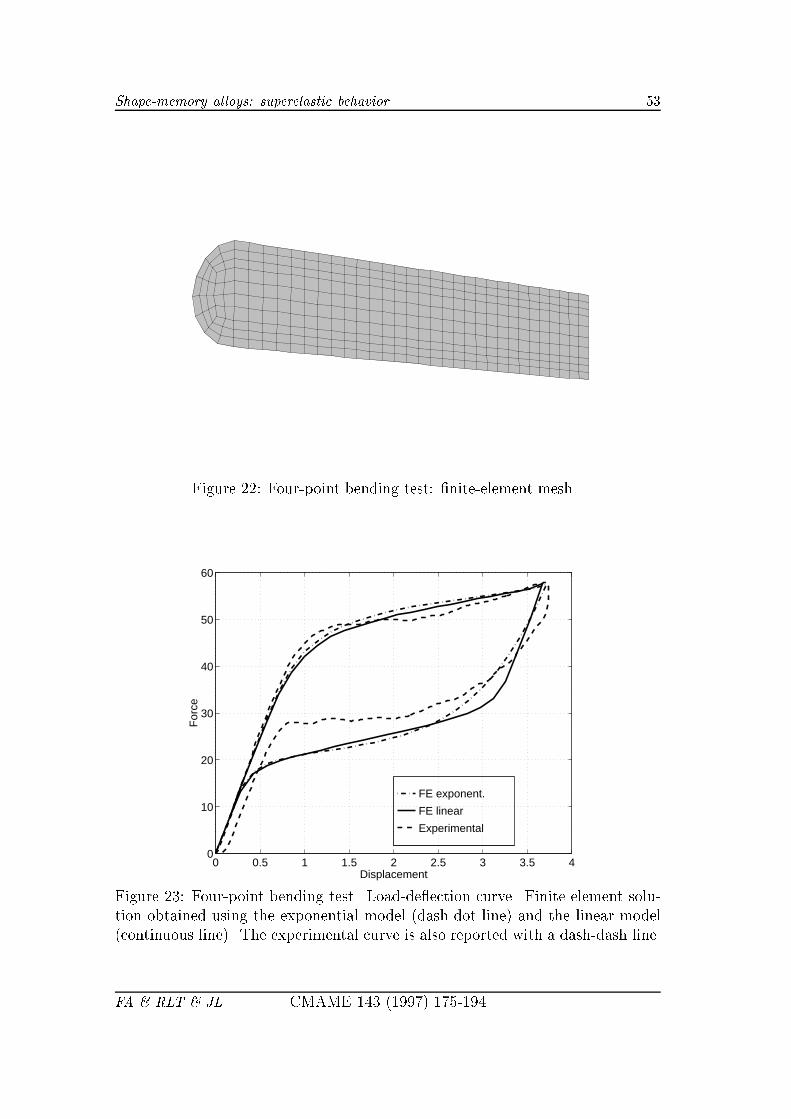
Shape-memory alloys: superelastic behavior 53
Figure 22: Four-point bending test: �nite-element mesh.
FE exponent.
FE linear
Experimental
0 0.5 1 1.5 2 2.5 3 3.5 40
10
20
30
40
50
60
Displacement
For
ce
Figure 23: Four-point bending test. Load-de ection curve. Finite element solu-tion obtained using the exponential model (dash-dot line) and the linear model(continuous line). The experimental curve is also reported with a dash-dash line.FA & RLT & JL CMAME 143 (1997) 175-194
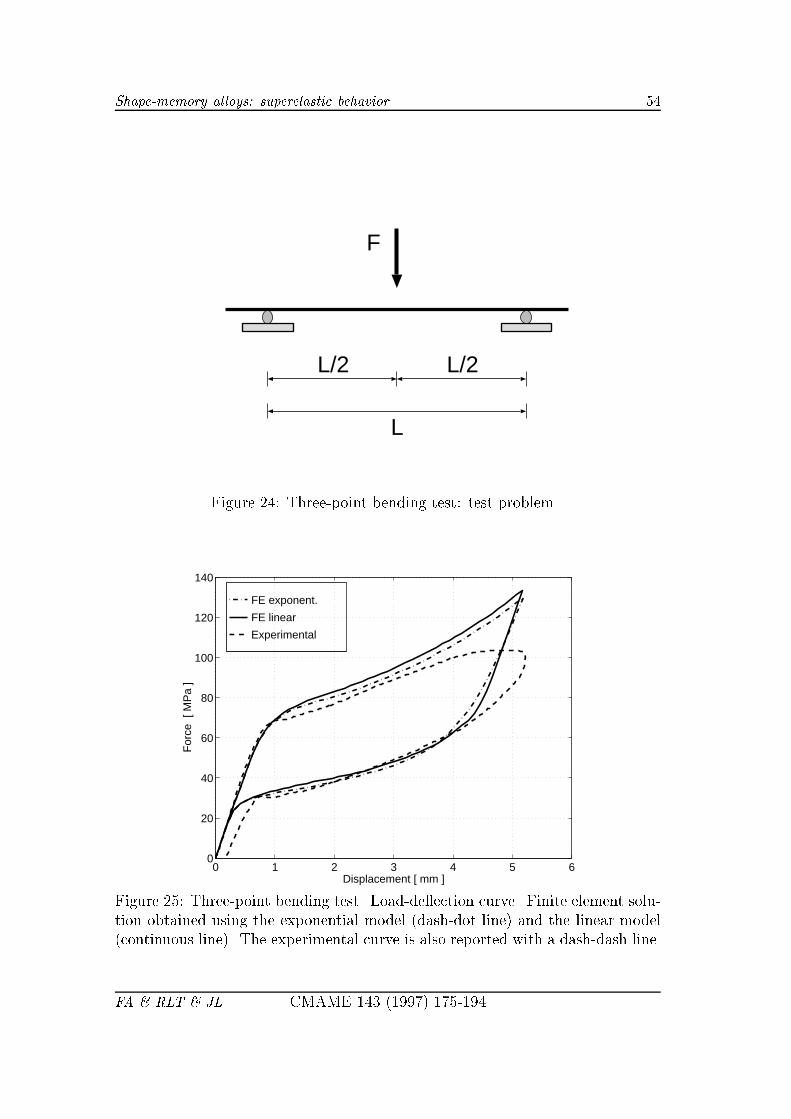
Shape-memory alloys: superelastic behavior 54F
L
L/2 L/2
Figure 24: Three-point bending test: test problem.FE exponent.
FE linear
Experimental
0 1 2 3 4 5 60
20
40
60
80
100
120
140
Displacement [ mm ]
For
ce [
MP
a ]
Figure 25: Three-point bending test. Load-de ection curve. Finite element solu-tion obtained using the exponential model (dash-dot line) and the linear model(continuous line). The experimental curve is also reported with a dash-dash line.FA & RLT & JL CMAME 143 (1997) 175-194

Shape-memory alloys: superelastic behavior 55List of Figures1 Shape-memory e�ect. . . . . . . . . . . . . . . . . . . . . . . . . . 422 Superelasticity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433 Twinned martensitic structure. . . . . . . . . . . . . . . . . . . . 434 Detwinned martensitic structure. . . . . . . . . . . . . . . . . . . 445 1D-1 model: production of single-variant martensite . . . . . . . . 446 1D-1 model: production of austenite . . . . . . . . . . . . . . . . 457 1D-1 model: stress cycles at constant temperature . . . . . . . . . 458 1D-1 model: stress cycles at constant temperature . . . . . . . . . 469 1D-1 model: stress cycles at constant temperature . . . . . . . . . 4610 1D-1 model: stress cycles at constant temperature . . . . . . . . . 4711 3D-1 model: uniaxial stress cycles . . . . . . . . . . . . . . . . . . 4712 3D-1 model: tension-compression cycle . . . . . . . . . . . . . . . 4813 Non-proportional stress cycle: test problem. . . . . . . . . . . . . 4814 3D-1 model: non-proportional stress cycle . . . . . . . . . . . . . 4915 Luders band: test problem. . . . . . . . . . . . . . . . . . . . . . 4916 3D-1 model: simulation of the Luders-band e�ect . . . . . . . . . 5017 Material-parameter characterization . . . . . . . . . . . . . . . . . 5018 Material-parameter characterization . . . . . . . . . . . . . . . . . 5119 Material-parameter characterization . . . . . . . . . . . . . . . . . 5120 Material-parameter characterization . . . . . . . . . . . . . . . . . 5221 Four-point bending test: test problem. . . . . . . . . . . . . . . . 5222 Four-point bending test: �nite-element mesh . . . . . . . . . . . . 5323 Four-point bending test: �nite-element solution . . . . . . . . . . 5324 Three-point bending test: test problem. . . . . . . . . . . . . . . 5425 Three-point bending test: �nite-element solution . . . . . . . . . . 54
FA & RLT & JL CMAME 143 (1997) 175-194