Sensors and Actuators A: Physical · Shin et al. / Sensors and Actuators A 208 (2014) 37–49...
13
Author's personal copy Sensors and Actuators A 208 (2014) 37–49 Contents lists available at ScienceDirect Sensors and Actuators A: Physical jo ur nal homepage: www.elsevier.com/locate/sna Micromachined ultrasonic Doppler velocity sensor using nickel on glass transducers Minchul Shin a , Zhengxin Zhao a , Paul DeBitetto b , Robert D. White a,∗ a Mechanical Engineering, Tufts University, 200 College Avenue, Medford, MA 02155, USA b Draper Laboratory, 555 Technology Square, Cambridge, MA 02139, USA a r t i c l e i n f o Article history: Received 5 August 2013 Received in revised form 2 December 2013 Accepted 16 December 2013 Available online 3 January 2014 Keywords: Micromachined Ultrasound Doppler Velocity Sensor Array a b s t r a c t A micromachined array of 168 nickel-on-glass capacitive ultrasound transducers was used to demon- strate a long range Doppler velocity measurement system. By using an electroplated nickel on glass process, the total capacitance of the chip was reduced to 65 pF, resulting in a high signal to noise ratio and allowing an operable range of 1.5 m. The range is limited by room reverberation level, rather than electronic noise. The sensor array operates at a 180 kHz resonant frequency to achieve a half-angle −3 dB beamwidth of 6 ◦ with a 1 cm 2 die. The cMUT array was characterized using laser Doppler vibrometry (LDV), beampattern measurements, range testing, and the ability to measure the velocity of a moving plate. The sensor is capable of measuring the velocity of a moving reflector with a resolution of 6 cm/s, at an update rate of 0.016 s, and with a range of 1.5 m (3 m round trip). © 2013 Elsevier B.V. All rights reserved. 1. Introduction Range finding and velocity measurement sensors are required for a variety of navigation tasks including mobile robot navigation, personal navigation systems, automotive sensing, micro air vehicle navigation, obstacle detection, and map building [1–6]. A num- ber of possible sensing modalities exist, including millimeter wave RADAR systems, laser range finding systems, and infrared range finding systems. Ultrasonic range finding and velocity measure- ment is also an option with certain advantages. Among suitable techniques, RADAR-based Doppler velocity or distance measurement systems and laser rangefinders can provide high accuracy. However, these systems suffer from high power con- sumption and high cost. Laser rangefinders may also be sensitive to ambient light conditions, and may not be able to penetrate heavy rain or snow [7,8,27]. When compared with an ultrasonic array of high enough frequency (e.g. 180 kHz as described here), millimeter wave RADAR tends to require a larger aperture to provide a narrow beam, resulting in a physically large system. For instance, a modern automotive millimeter wave RADAR system operating at f = 77 GHz ∗ Corresponding author. Tel.: +1 617 627 2210. E-mail address: [email protected] (R.D. White). [27] with a desired half-angle beamwidth of = 6 ◦ , would require an aperture of L ≈ 3.7 cm [32, p. 192], L ≈ c/f sin (1) Eq. (1) is valid for acoustic and RF waves. Hence, due to the much lower speed of sound as compared to RF, the same beamwidth can be achieved at 180 kHz, as done in the ultrasonic device described here, with a 1 cm aperture. Another approach for obstacle detection in mobile robotics is infrared reflectance sensors. These devices tend to be low cost and low power consumption. However, the infrared rangefinder tends to have low accuracy, and may suffer from ambient light sensitivity and sensitivity to surface character- istics [8,9]. Ultrasonic sensors are another alternative for navigation and obstacle detection. They have advantages of low cost, small size, low power consumption, and simple signal processing [10]. Ultra- sound will scatter and absorb in a different manner than lasers and IR, if for no other reason than the difference in wavelength (millimeters vs. hundreds of nanometers or a few microns). In addition, it will scatter and absorb differently than millimeter RADAR, despite the similar wavelength, due to the different wave modality (acoustic rather than electromagnetic). Thus, due to their low cost, size, and power, as well as the additional envi- ronmental information they provide, ultrasonic sensors are an 0924-4247/$ – see front matter © 2013 Elsevier B.V. All rights reserved. http://dx.doi.org/10.1016/j.sna.2013.12.025
Transcript of Sensors and Actuators A: Physical · Shin et al. / Sensors and Actuators A 208 (2014) 37–49...

Author's personal copy
Sensors and Actuators A 208 (2014) 37– 49
Contents lists available at ScienceDirect
Sensors and Actuators A: Physical
jo ur nal homepage: www.elsev ier .com/ locate /sna
Micromachined ultrasonic Doppler velocity sensor using nickel on
glass transducers
Minchul Shina, Zhengxin Zhaoa, Paul DeBitettob, Robert D. Whitea,∗
a Mechanical Engineering, Tufts University, 200 College Avenue, Medford, MA 02155, USAb Draper Laboratory, 555 Technology Square, Cambridge, MA 02139, USA
a r t i c l e i n f o
Article history:
Received 5 August 2013
Received in revised form 2 December 2013
Accepted 16 December 2013
Available online 3 January 2014
Keywords:
Micromachined
Ultrasound
Doppler
Velocity
Sensor
Array
a b s t r a c t
A micromachined array of 168 nickel-on-glass capacitive ultrasound transducers was used to demon-
strate a long range Doppler velocity measurement system. By using an electroplated nickel on glass
process, the total capacitance of the chip was reduced to 65 pF, resulting in a high signal to noise ratio
and allowing an operable range of 1.5 m. The range is limited by room reverberation level, rather than
electronic noise. The sensor array operates at a 180 kHz resonant frequency to achieve a half-angle −3 dB
beamwidth of 6◦ with a 1 cm2 die. The cMUT array was characterized using laser Doppler vibrometry
(LDV), beampattern measurements, range testing, and the ability to measure the velocity of a moving
plate. The sensor is capable of measuring the velocity of a moving reflector with a resolution of 6 cm/s,
at an update rate of 0.016 s, and with a range of 1.5 m (3 m round trip).
© 2013 Elsevier B.V. All rights reserved.
1. Introduction
Range finding and velocity measurement sensors are required
for a variety of navigation tasks including mobile robot navigation,
personal navigation systems, automotive sensing, micro air vehicle
navigation, obstacle detection, and map building [1–6]. A num-
ber of possible sensing modalities exist, including millimeter wave
RADAR systems, laser range finding systems, and infrared range
finding systems. Ultrasonic range finding and velocity measure-
ment is also an option with certain advantages.
Among suitable techniques, RADAR-based Doppler velocity or
distance measurement systems and laser rangefinders can provide
high accuracy. However, these systems suffer from high power con-
sumption and high cost. Laser rangefinders may also be sensitive to
ambient light conditions, and may not be able to penetrate heavy
rain or snow [7,8,27]. When compared with an ultrasonic array of
high enough frequency (e.g. 180 kHz as described here), millimeter
wave RADAR tends to require a larger aperture to provide a narrow
beam, resulting in a physically large system. For instance, a modern
automotive millimeter wave RADAR system operating at f = 77 GHz
∗ Corresponding author. Tel.: +1 617 627 2210.
E-mail address: [email protected] (R.D. White).
[27] with a desired half-angle beamwidth of � = 6◦, would require
an aperture of L ≈ 3.7 cm [32, p. 192],
L ≈ c/f
sin �(1)
Eq. (1) is valid for acoustic and RF waves. Hence, due to the much
lower speed of sound as compared to RF, the same beamwidth can
be achieved at 180 kHz, as done in the ultrasonic device described
here, with a 1 cm aperture. Another approach for obstacle detection
in mobile robotics is infrared reflectance sensors. These devices
tend to be low cost and low power consumption. However, the
infrared rangefinder tends to have low accuracy, and may suffer
from ambient light sensitivity and sensitivity to surface character-
istics [8,9].
Ultrasonic sensors are another alternative for navigation and
obstacle detection. They have advantages of low cost, small size,
low power consumption, and simple signal processing [10]. Ultra-
sound will scatter and absorb in a different manner than lasers
and IR, if for no other reason than the difference in wavelength
(millimeters vs. hundreds of nanometers or a few microns). In
addition, it will scatter and absorb differently than millimeter
RADAR, despite the similar wavelength, due to the different wave
modality (acoustic rather than electromagnetic). Thus, due to
their low cost, size, and power, as well as the additional envi-
ronmental information they provide, ultrasonic sensors are an
0924-4247/$ – see front matter © 2013 Elsevier B.V. All rights reserved.http://dx.doi.org/10.1016/j.sna.2013.12.025

Author's personal copy
38 M. Shin et al. / Sensors and Actuators A 208 (2014) 37– 49
attractive sensor technology to include in a mix of navigational
sensors. It is, however, important to note that ultrasonic sen-
sors also can suffer from the drawback of multipath reflections,
which can result in poor distance measurements, and may also
be sensitive to changes in reflecting surfaces and ambient condi-
tions.
Ultrasonic distance measurement systems are available com-
mercially, although they typically operate at frequencies near
40 kHz. Some examples include the well-known Polaroid ranging
module that uses a time of flight distance measurement method
and operates at frequencies between 49 and 60 kHz [24]. Another
example is the SRF series ultrasonic sensor from Devantech [Devan-
tech, Norfolk, England] which is smaller than the Polaroid system,
with a 4.3 cm × 2 cm front aperture. This system operates at 40 kHz.
For a 1 cm aperture transducer, the size used for the device
described in this paper, a frequency of 40–60 kHz results in a half-
angle beamwidth of 35–60◦, according to Eq. (1). Hence the sensors
are not very directional, contributing to problems with reverbera-
tion and multipath reflections.
It is, however, expected that a more directional sensor will gen-
erate, and pick up, fewer multipath echoes. Through the use of
MEMS technology, the operating frequency can be increased to
180 kHz, as demonstrated here, and thus the half-angle beamwidth
can be reduced from 35–60◦ to 6◦, resulting in substantially
improved directionality. The increase in frequency reduces the
range of the sensor to some degree due to the increase in bulk
absorption at higher frequencies, but the range can still be kept
acceptably high.
MEMS based ultrasonic sensor systems including both piezo-
electric micromachined ultrasound transducers (pMUTs) and
capacitive micromachined ultrasound transducers (cMUTs) have
been described for other applications previously [e.g. 16, 22,
25, 26, 29, 31, 33, 35], with a preponderance of applications in
biomedical ultrasound and non-destructive testing. A few authors
[10,11,38,40] have described MEMS-based ultrasonic distance
measurement systems. These systems use either piezoelectric or
thermal actuation principles, and achieve a range of 10 cm to, at
most, 1.3 m.
Indeed, although MEMS-based rangefinders have the advan-
tage of low cost and high portability with a small size, they must
overcome challenges in terms of power output and sensitivity that
can result in a limited range [11]. For example, a previous system,
described by the authors, which used polysilicon surface microma-
chined cMUTs only achieved a 30 cm (60 cm round trip) range [38].
To overcome the short-range problem, the cMUT device described
here was developed with a low stray capacitance and a high drive
voltage drive. This combination allowed an achievable range to the
reflector of 1.5 m (3 m round trip).
The device described in this paper is fabricated in a 3 layer
nickel-on-glass MEMS fabrication process for cMUT sensors that
was critical for achieving low stray capacitance. The low capac-
itance is achieved due to the complete lack of a conducting or
semiconducting substrate below the signal traces and bond pads;
by using a dielectric (glass) substrate, stray capacitance between
traces and bond pads is dramatically reduced when compared to
a device built on a semiconducting substrate with a thin layer
dielectric. This process has some similarities to LIGA and LIGA-like
processing [12–15] but is considerably simpler to implement. The
process enables fabrication for the production of a range of low
stray capacitance sensors; for instance we have used this process
for shear sensors [21]. This paper outlines the methods for creat-
ing a solution for a smaller, lower cost, low capacitance, long range,
and low power MEMS ultrasonic array for velocity measurement in
air. This is the only example in the literature of a cMUT based ultra-
sonic velocity measurement system in air with a range of more than
30 cm.
2. Design and modeling
The transducer array consists of 168 individual array elements
arranged in a 14 × 12 hexagonal grid on a 1 cm2 chip. The transmit
area of the array is 9 mm × 9 mm. The 1 cm size of the chip, which
sets the array aperture, was selected to give the same beamwidth
as typical automotive millimeter wave RADAR systems (6◦) at an
achievable operating frequency (180 kHz) [27]. Aperture and oper-
ating frequency can be modified to change beamwidth according to
Eq. (1), within constraints of system size and achievable resonant
frequency.
The individual elements are 600 �m diameter, 9 �m thick
Nickel, separated from a 390 �m diameter Cr/Au bottom electrode
by a 5 �m air gap. Element diameter was selected to be signifi-
cantly less than the wavelength of sound at the 180 kHz operating
frequency (at 180 kHz, � = 1.9 mm), but to be as large as possi-
ble (which maximizes signal) without collapsing due to in-process
adhesion related failure (e.g. stiction). The elements were packed
as closely together as possible in order to maximize signal. Due to
the geometry of a hexagonal close packed array, adjacent rows are
spaced 0.72 mm center-to-center, and adjacent columns are spaced
0.63 mm center-to-center. Since the element motion is larger near
the center than the edge, the center of the electrode contributes
more signal than the outside of the electrode. However, both center
and edge contribute the same amount of stray capacitance. Thus, it
is beneficial to use an electrode that is somewhat smaller than the
diaphragm, in order to improve sensitivity. The exact size was not
optimized. Twenty-eight 10 �m diameter vent holes are included
in each diaphragm for release etching and static pressure equal-
ization. The vent holes also control the damping. All elements are
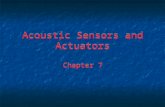
connected in parallel. The geometry is shown in Fig. 1.
A fully coupled electro-acoustic-mechanical model was con-
structed for the system. The model is similar to that described
previously for other MEMS cMUTs [16,38]. The model includes
the diaphragm stiffness and mass, including residual stress effects,
squeeze film damping, backing cavity compliance, vent hole damp-
ing, and external air impedance. The acoustic-mechanical model is
coupled in a bi-directional fashion to the electrical domain via elec-
trostatic coupling. Fig. 2 shows the geometry and an equivalent
acoustic circuit for the model.
The model derivation begins from the equation for a thin bend-
ing plate with residual stress, forced by distributed pressures from
the electrostatics and the air,
D∇4u(r, t) − T∇2u(r, t) + �Nih∂2u(r, t)
∂t2
= 1
2V2(t)
ε0
(g0 − u(r, t))2˚(a2 − r) + p1(t) − p2(t) (2)
where r is the radial coordinate, t is time, u(r,t) is the displacement
of the diaphragm, positive downwards, V(t) is the applied voltage,
p1(t) and p2(t) are the pressures above and below the diaphragm, ε0
is the permittivity of free space, g0 is the gap height (5 �m), �Ni is the
density of Nickel, taken to be 8900 kg/m3 [17], and h is the thickness
of the diaphragm (9 �m). It is assumed that the pressure in the
gap and the pressure in the external acoustic medium are nearly
constant with radial position, since for the frequencies of interest,
near 180 kHz, the wavelength of sound, � = 1.9 mm, is greater than
the radius of the diaphragm, a1 = 0.3 mm. The electrostatic force
only acts over the area of the electrode, which is a circle of radius
a2. Thus the Heaviside step function ˚(a2− r) appears on the right.
D and T are the bending stiffness and tension, respectively,
D = Eh3
12(1 − �2)(3)
T = �Rh (4)

Author's personal copy
M. Shin et al. / Sensors and Actuators A 208 (2014) 37– 49 39
Fig. 1. Transducer geometry. Top left: full array chip. Top right: individual element, top view. Bottom: individual element, cross-section.
Fig. 2. Electro-acoustic-mechanical model of a single axisymmetric element.
Table 1Geometric properties of the nickel-on-glass cMUT sensor.
Symbol Property Value Units
a1 Radius of diaphragm 300 �m
a2 Radius of bottom electrode 195 �m
h Thickness of nickel layer 9 �m
g0 Thickness of sacrificial layer (air gap) 5 �m
r1 Radius of diaphragm vent holes 5 �m
N Number of vent holes in diaphragm 28 Dimensionless
where E and � are the elastic modulus and Poisson ratio of the elec-
troplated Nickel, taken to be 205 GPa and 0.31 [18,19] and �R is
the residual stress in the Nickel film. The residual stress for plated
nickel thin films prepared from nickel sulfamate plating baths can
vary considerably, from at least −80 MPa to +80 MPa, depending on
additives, plating temperature, current density, and film thickness
[e.g. 36]. Summaries of the geometric and material properties for
the model appear in Tables 1 and 2.
Steady state harmonic solutions with time variation ejωt are
sought. For receive operation, the bias is held constant, V(t) = Vdc.
Table 2Material properties of the diaphragm.
Symbol Property Value Units Reference(s)
�Ni Density of nickel 8900 kg/m3 [17]
E Modulus of elasticity of nickel 205 GPa [18]
�R Residual stress of nickel −80 to 80 MPa [36]
� Poisson’s ratio of nickel 0.31 Dimensionless [19]

Author's personal copy
40 M. Shin et al. / Sensors and Actuators A 208 (2014) 37– 49
For transmit operation the applied voltage is harmonic at ωac,
V(t) = Vaccos(ωact). In transmit mode, this will produce a primary
steady state response at ω = 2ωac due to the square law electro-
statics. A Galerkin procedure can be employed to determine u(r)
[42–44]. A functional form is assumed that satisfies the boundary
conditions with an unknown coefficient or coefficients:
u(r) = U0 (r) (5)
where U0, in this case, is the unknown centerpoint displacement.
After substitution of Eq. (5) for u(r) in Eq. (2), multiplication of both
sides of Eq. (2) by u(r), and integration over the domain, a result is
arrived at for U0,
U0 =[
D
∫ a1
0 (r)∇4 (r)rdr∫ a1
0 (r)rdr
− T
∫ a1
0 (r)∇2 (r)rdr∫ a1
0 (r)rdr
− h�Niω2
∫ a1
0 2(r)rdr∫ a1
0 (r)rdr
− ε0
g30
(V2
dc +V2
ac
2
) ∫ a2
0 2(r)rdr∫ a1
0 (r)rdr
]−1
·(∫ a2
0 (r)rdr∫ a1
0 (r)rdr
ε0
4g20
V2ac + (p1 − p2)
)(6)
This result can be used to determine the structural acoustic
impedance in Fig. 2, where the volume velocity of the diaphragm
is driven by the differential pressure and the effective electrostatic
pressure:
Q = 1
Zst
(∫ a2
0 (r)rdr∫ a1
0 (r)rdr
ε0
4g20
V2ac + (p1 − p2)
)(7)
where Q is the oscillatory volume velocity of the diaphragm,
Q = 2�jω
∫ a1
0
u(r)rdr (8)
Thus Q can be related to the centerpoint displacement by
U0 =Q
2�jω∫ a1
0 (r)rdr
(9)
Then, from Eqs. (6) and (7), the structural impedance can be
determined,
Zst = h�Ni
∫ a1
0 2(r)rdr
2�(∫ a1
0 (r)rdr
)2jω +
[D
∫ a1
0 (r)∇4 (r)rdr
2�(∫ a1
0 (r)rdr
)2− T
∫ a1
0 (r)∇2 (r)rdr
2�(∫ a1
0 (r)rdr
)2−
ε0
∫ a2
0 2(r)rdr
g30
2�(∫ a1
0 (r)rdr
)2
(V2
dc +V2
ac
2
)]1
jω(10)
The impedance shows a mass in series with a stiffness, as
expected. The negative stiffness of the electrostatic spring is evi-
dent in the last term. The result will only be valid up through the
first resonant frequency, above which the assumed modeshape will
no longer be valid. The structural impedance can be written as
Zst = Mstjω + 1
Cst jω+ 1
Celjω(11)
where Cst is the structural compliance for the first mode, Cel is the
effective linearized electrostatic spring compliance, and Mst is the
structural mass for the first mode. From (10) and (11) it is seen that
Mst = h�Ni
∫ a1
0 2(r)rdr
2�(∫ a1
0 (r)rdr
)2(12)
Cst =[
D
∫ a1
0 (r)∇4 (r)rdr
2�(∫ a1
0 (r)rdr
)2− T
∫ a1
0 (r)∇2 (r)rdr
2�(∫ a1
0 (r)rdr
)2
]−1
(13)
Cel = −[
ε0
∫ a2
0 2(r)rdr
g30
2�(∫ a1
0 (r)rdr
)2
(V2
dc +V2
ac
2
)]−1
(14)
In order to compute the structural impedance and the electro-
static coupling, a deflection shape, �(r), must be selected. Results
will be shown below for a few different possible choices of shape.
The integrals can be performed analytically or numerically.
The pressures above and below the diaphragm, p1 and p2, are
computed from the acoustic circuit in Fig. 2. The acoustic capac-
itance represents the compressibility of the air in the gap [23],
Cac =g0�a2
1
�0c2(15)
For flow in a thin gap below an oscillating perforated plate, the
flow resistance including squeeze film damping and viscous flow
resistance through the holes can be approximated as [30],
Rac = 12
�g30
NC(A) + 8
�r41
N
(h + 3�r1
8
)(16)
The first term comes from “squeeze film” resistance to flow in
the gap behind the diaphragm. The second term represents the
resistance to flow through the holes in the diaphragm. r1 is the
radius of the vent holes, N is the number of holes in the diaphragm,
and is the viscosity of air, taken to be 1.85 × 10−5 Pa s. The param-
eter C(A) is
C(A) = A
2− 3
8− A2
8− 1
2ln(√
A) (17)
where A = Nr21
/a21
is the ratio of the hole area to the full diaphragm
area. The result is identical to Skvor’s formula [39].
The complex acoustic pressure on the top surface of the
diaphragm comes from a combination of any incoming pressure
wave and the pressure generated by the oscillating element acting
as an acoustic source. The net velocity that creates the acoustic
source is the difference between the velocity through the holes
and the velocity of the diaphragm itself, as indicated by the topol-
ogy of the acoustic circuit. The pressure on the top surface of the
diaphragm is therefore
p1 = Zenv · (Qhole − Q ) + 2P0 (18)
The term P0 represents an incoming acoustic plane wave. This
is included to model an external acoustic input coming from the
environment in “receive” mode. The factor of 2 comes from the
scattered rigid wave. In transmit mode, P0 = 0.
The environmental impedance can be estimated from the radi-
ation impedance of a clamped circular diaphragm oscillating in the
static bending modeshape. The environmental impedance has been
derived by Greenspan [28],
Zenv ≈ �0c
a21
(1
2�(ka1)2 + 0.296j(ka1)
)(19)
c is the speed of sound, taken to be 343 m/s, and �0 is the equilib-
rium density of the acoustic medium, taken to be 1.21 kg/m3. This

Author's personal copy
M. Shin et al. / Sensors and Actuators A 208 (2014) 37– 49 41
Fig. 3. Comparison between the measured center point vibratory response for the transmit (TX) and receive (RX) chips, and the predictions from the model. (a) Shows
the magnitude results for four different possible choices of shape function and with zero residual stress. (b) Shows the comparison using the best fit values of structural
impedance given in Table 3.
is a good approximation for ka1 < 0.5. At low frequencies this is an
acoustic mass in parallel with an acoustic radiation resistance. An
extensive discussion of the computation of the radiation impedance
of circular diaphragms including multiple possible modeshapes
and extending to higher frequencies can be found in Lax [34], Porter
[37], and Greenspan [28]. For this device there is not much to be
gained by more complicated environmental impedance models.
The environmental impedance has little impact on device dynam-
ics. This would not, however, be the case for a water loaded device,
where environmental impedance would have a much more signif-
icant impact.
All the impedances in the acoustic circuit have been defined.
Using elementary circuit theory, the volume velocities Q and Qhole
can be computed in terms of the external driving pressure P0 in
receive mode, or the AC drive voltage Vac in transmit mode. Once Q
and Qhole are known, the magnitude of the oscillatory centerpoint
deflection can be computed from Eq. (9).
A direct comparison of model predictions can be made to the
diaphragm center point oscillation measured using a laser Doppler
velocimetry (LDV) system. In this experiment, the diaphragm is
driven by an AC voltage of amplitude Vac with an applied DC bias,
resulting in an electrostatic force at the same frequency as the
AC drive. For this type of excitation, the driving V2ac in the volt-
age source should be replaced with 4 VdcVac. Otherwise the model
is unchanged. In Fig. 3, the predicted center point displacement
from the dynamic model is compared to the measured center point
response for an element on each of the two chips. The data is nor-
malized to the product of the applied DC bias of 9 V and the applied
AC peak drive of 1 V.
In Fig. 3(a) model predictions are shown for the following pos-
sible shape functions, with an assumed residual stress of zero. The
measured LDV response of the two chips is also shown. All choices
of shape produce predictions of center frequency and peak response
that are within a factor of 2 of the measured result, but with the
unknown residual stress and lack of certainty about the best choice
of shape function, uncertainties remain in model predictions prior
to performing dynamic experiments. The shapes used in Fig. 3(a)
are: the response of an axisymmetric circular bending plate with a
clamped edge to a uniform static pressure load [41, p. 178],
(r) =(
1 −(
r
a1
)2)2
(20)
the response of an axisymmetric circular bending plate with a sim-
ply supported edge to a uniform static pressure load [41, p. 168],
(r) = 1 − 23 + �
5 + �
(r
a1
)2
+ 1 + �
5 + �
(r
a1
)4
(21)
the first in vacuo vibratory mode of a circular tensioned membrane
[32],
(r) = J0
(2.4048
r
a1
)(22)
and the first in vacuo vibratory mode of a circular plate with
clamped edges [34],
(r) = 0.0528I0
(3.196
r
a1
)+ 0.9472J0
(3.196
r
a1
)(23)
Due to uncertainties in the nickel residual stress and boundary
conditions, it is unclear which of these choices will give the most
accurate result. For low stress (pure bending) at low frequencies,
Eq. (20) or Eq. (21), should work well, depending on the flexibility
of the anchors, and therefore the best choice of boundary condi-
tion. For high stress (tension dominated) near resonance, Eq. (22)
is expected to be a good choice. For low stress (bending dominated)
near resonance, Eq. (23) may produce superior results. Any of these
shapes can be used to predict an approximate frequency response
curve, as shown in Fig. 3(a). This is very useful for targeting the
design to approximately achieve a desire center frequency, gain,
and bandwidth. By testing multiple shapes we also achieve a sense
of expected levels of variation due to changes in residual stress and
boundary conditions. Typically, we find that exactly matching the
model to the dynamic response of the system can only be done
after fitting at least one parameter using experimental data. It is
then possible to iterate on the design using the fitted parameter to
achieve a closer match to a target operating point. Alternatively, one
could solve Eq. (2) numerically at a series of frequencies. This will
require selection of boundary conditions and estimation of resid-
ual stress, as well as estimation of the relative magnitude of the
pressure and electrostatic driving terms on the right hand side. The
resulting solutions could be used as a frequency dependent (r),
resulting in frequency dependent structural impedances. However,
due to uncertainties in the residual stress and boundary conditions,
and variation in film properties from wafer to wafer or chip to chip,
these impedances will still not exactly match experimental results.

Author's personal copy
42 M. Shin et al. / Sensors and Actuators A 208 (2014) 37– 49
Table 3Structural impedance of the diaphragm as computed from Eqs. (12) and (13) with
�R = 0 MPa with (r) = J0(2.4048 r/a1), and compared to the best fit values for fitting
the LDV data in Fig.3.
Analytical result,
�R = 0,
(r) = J0(2.4048·r/a1)
Best fit RX Best fit TX
Cst 3.4 × 10−18 m3/Pa 3.8 × 10−18 m3/Pa 3.8 × 10−18 m3/Pa
Mst 4.1 × 105 kg/m4 2.6 × 105 kg/m4 2.2 × 105 kg/m4
Once dynamic data is available, the best option for predicting
the acoustic response is to determine the structural compliance and
mass, Cst and Mst, by fitting the measured response for each chip.
The model is still physics based, but the structural uncertainties
have been removed by fitting to data. Fig. 3(b) shows a comparison
to the data with these best fit values. The best fit values of Cst and Mst
are given in Table 3, and compared for interest to the results using
the first in vacuo tensioned membrane mode of Eq. (22) with zero
residual stress. For subsequent computations, the best fit values of
Cst and Mst will be used.
The farfield transmitted pressure from the array can be com-
puted at any point in the field (rf, �f, �f) by summing the
contribution from each element in the array treated individually
as a directional source,
P(rf , �f , �f ) = j�0ω
2�·
N∑m=1
1
Rm· (Qhole − Q )e(−˛c−jk)Rm H(�f ) (24)
where Qhole− Q is the net source volume velocity: the difference
between the diaphragm volume velocity and the flow through the
vent holes. Rm is the scalar distance from the center of the mth array
element to the field point. H(�f) is the directivity of an individual
element. The acoustic absorption is ˛c in Np/m. At frequencies near
180 kHz in air of this is well modeled using the classical absorption
coefficient [32],
˛c = ω2
2�0c3
(4
3+ � − 1
Pr
)=(
1.37 × 10−11 Np · s2
m
)f 2 (25)
where � = 1.40 is the ratio of specific heats for air near 20 ◦C, and
Pr = 0.75 is the Prandtl number of air near 20 ◦C. f is the frequency
in Hz.
At the drive frequency of 180 kHz, ka1 is close to unity, so the
individual elements are somewhat directional. The beampattern
of a baffled piston is used to approximate the beampattern of the
individual elements,
H(�f ) = 2J1(kaeff sin �f )
kaeff sin �f(26)
where � is the angle, measured from the normal to the field point,
and J1 is the Bessel function of the first kind, order 1. For the
purposes of directivity calculation, the effective radius, aeff, of the
transmitting element should be used. Since the element deforms as
a circular bending plate, the effective radius of an equivalent baf-
fled piston is somewhat less than the physical radius. An effective
radius equal to 70% of the physical radius is a good approxima-
tion. This was determined by a comparing Eq. (26) to a numerical
computation of the farfield beampattern for a baffled circular plate
oscillating in the clamped static shape given in Eq. (20).
The summation is over the 168 array elements. Since all the
elements are identical, all the Qhole− Q are the same, and only the
distance to the field point, Rm, changes. It should be noted that this
dynamic model neglects any acoustic coupling between the ele-
ments via mutual radiation impedances or through the connected
backing cavities. Computations (not shown) were done including
mutual radiation impedances as described in Porter [37]. This had
little impact on the computed beampattern, due to the relatively
low impedance of the air. Note that mutual radiation impedance
would be much more important if operating in a heavy fluid such
as water.
3. Fabrication
The cMUT sensor was fabricated with an electroplated nickel
surface micromachining process. The process started with a
550 �m thick soda lime glass wafer as shown in Fig. 4 panel
1. To clean the wafer, a Piranha clean was conducted for 5 min.
75 nm/225 nm thick Cr/Au interconnects (a bottom electrode and
Fig. 4. Fabrication process using nickel and copper electroplating.

Author's personal copy
M. Shin et al. / Sensors and Actuators A 208 (2014) 37– 49 43
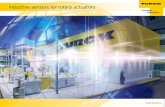
Fig. 5. Photograph of the entire nickel cMUT array after packaging (left) and a corner of the array at higher magnification (right).
bonding pads) were deposited with sputtering and patterned by
liftoff using liftoff resist (LOR) as shown in Fig. 4 panels 2 and 3. Sub-
sequently, a thin seed layer of Ti/Cu (30 nm/300 nm) was deposited
in preparation for copper plating and patterned by liftoff using LOR
as shown in panel 4. 8 �m thick AZ 9245 photoresist was then spun
on as a mask for the plated Cu sacrificial layer, seen in panel 5. Before
copper plating, the copper oxide was removed by a short dip in the
Cu plating solution with no current applied. As shown in panel 6, a
5 �m sacrificial layer of copper was then electroplated to cover the
entire substrate except anchor regions and contact pads in a com-
mercial copper plating solution [Technic, Inc., Cranston, RI]. The
plating solution was 5–10% copper sulfate, 15–20% sulfuric acid,
with chloride ions and brightener additives. Plating was conducted
at room temperature, a bath pH of 0.5, and a plating current den-
sity of approximately 5 mA/cm2. The plating rate was 150 nm/min.
After copper plating, the sacrificial layer was complete.
An AZ 9260 photoresist mold was then deposited and photo-
patterned. This photoresist mold defines the structural layer
including the holes, as shown in panel 7. The 9 �m thick struc-
tural layer was electroplated at 50 ◦C in a commercial nickel
sulfamate plating solution [Technic Inc., Cranston, RI], consist-
ing of 20–35% nickel sulfamate, 0.5–1.5% nickel bromide, and
1–3% boric acid, with a pH of 4.0. The plating rate was approx-
imately 100 nm/min and the resulting surface roughness Ra was
approximately 30–40 nm. To minimize the surface roughness of the
plated structure in both plating procedures, a small plating current
(≈5 mA/cm2) was used, as well as agitation and filtration of the
plating solution. After nickel plating, a protective photoresist layer
was spun on for dicing the wafer. Finally, the resist was stripped
and the sacrificial layer was etched away in a mixture of 1 part
Acetic Acid to 1 part 30% Hydrogen Peroxide to 18 parts DI water
for 24 h, producing the structure seen in panel 8. The chip was then
rinsed in water, isopropanol, and methanol, and finally allowed to
air dry in a dry box at low relative humidity.
The chip was packaged into a 16 pin DIP package using epoxy
and ball bonded with 25 �m diameter gold wire. Fig. 5 shows
photographs of the finished device. Tables 1 and 2 give the tar-
get geometric and the material properties of the sensor structure.
There is some deviation from the target structural layer thickness
in the fabricated devices. For the transmit (TX) chip and receive
(RX) chips, the measured thickness of the structural nickel was
9.5 �m ± 0.5 �m and 8.5 �m ± 0.5 �m respectively. For both chips,
the thickness of the air gap was within 0.5 �m of the target thick-
ness of 5.0 �m.
4. Electronics
The nickel-on-glass chip has a high predicted snapdown voltage
of 360 V. The high snapdown voltage of the nickel-on-glass chip
is due to the thick structure and the air gap. The high snapdown
device can sustain a high input voltage swing on the transmitter,
and a high DC bias voltage on the receiver to increase output and
sensitivity if desired.
Fig. 6. Transmit bridge amplifier circuit with the cMUT chip.
Modified from [20].

Author's personal copy
44 M. Shin et al. / Sensors and Actuators A 208 (2014) 37– 49
Fig. 7. Receive electronics.
In order to produce a higher voltage swing for the input, a
bridge amplifier stage was used for the transmitter. A high voltage
operational amplifier (OPA 445 high voltage FET-Input operational
amplifier [Texas Instrument, Dallas, TX]) was used to increase the
voltage swing across the cMUT to as much as 180 Vpeak-to-peak while
operating from ±45 V supplies. In operation, 140 Vpeak-to-peak was
used at 180 kHz due to slew rate limitations on the amplifiers. Fig. 6
shows the circuit. The drive is configured as a bridge amplifier,
allowing voltage swings twice as large as the power supply range
through a differential drive scheme.
The receive electronics, shown in Fig. 7, consist of a DC bias
source, a voltage preamplifier, and subsequent gain stages. The DC
bias of 10 V was provided using the ADR01 voltage reference IC
[Analog Devices, Wilmington, MA]. In receive mode, the element
acts as a current source through electrostatic coupling. With the DC
bias held fixed across the element, the oscillatory current delivered
to the electrical side by a single element is
I =∫ a2
0 (r)rdr∫ a1
0 (r)rdr
ε0Vdc
g20
Q (27)
The voltage preamplifier integrates this current using the self-
capacitance of the MEMS device, Csensor, of 65 pF. The preamplifier
is realized using the AD797 low noise operational amplifier [Ana-
log Devices, Wilmington, MA]. A 100 k� DC stabilizing resistor,
R9, is included between the voltage amplifier input and ground,
resulting in a high pass filter with a cutoff frequency of 25 kHz.
Following the preamplifier, the signal is passed into a series of
three operational amplifier based circuits, each configured with
a bandwidth of 2–800 kHz and 26 dB of voltage gain. Within the
passband of the system, between 25 kHz and 800 kHz, the voltage
output at the end of the chain is simply
Vout = GN2
Csensor jωI (28)
where G = 8000 is the voltage gain of the amplifier chain, N2 = 168 is
the number of cMUTs in the array, Csensor = 65 pF is the capacitance
of the chip, and I is the current delivered by an individual element,
taken from Eq. (27).
Fig. 8 shows the physically realized receive electronics. The
board consists of a ZIF socket for holding the packaged cMUT chip,
the circuit above, and power and signal connectors. The electronics
are enclosed by a grounded metal box for protection from electro-
magnetic interference (EMI). An optional 90 V DC bias source is also
included, although due to thermal problems the higher DC bias was
not used.
Using the model with the best fit structural impedance values
of Table 3, and the electronics as described here, the transmitted
pressure and receive sensitivity for these two chips can be com-
puted. The results are shown in Fig. 9. The on-axis sound pressure
level at 1 m from the transmit array is 69 dB SPL, when driving with
140 Vpp at 180 kHz (14 Vpp at the input to the bridge amplifier).
Fig. 8. Physical realization of the receive electronics.

Author's personal copy
M. Shin et al. / Sensors and Actuators A 208 (2014) 37– 49 45
(a) (b)
20
40
60
80
30
210
60
240
90
270
120
300
150
330
180 0100 15 0 20 0 25 00
0.5
1
1.5
Sen
s (V
/Pa)
Frequ ency Response, Rece ive Sensitivity
100 15 0 20 0 25 0-15 0
-10 0
-50
0
50
100
Frequ ency (kHz)
Ph
ase
(deg
)
Fig. 9. Predicted array performance using the best fit structural impedance from Table 3. (a) Predicted farfield transmit beampattern at 180 kHz for the transmit array at
a distance 1 m from the center of the array. Results are for 140 Vpp drive, and are presented in dB SPL (dB re 20 �Parms). (b) Predicted receive array sensitivity. Results are
reported at the end of the amplifier chain (output of U3 in Fig. 7) with 10 Vdc bias and for a normally incident plane wave.
This requires ±35 V supplies for the bridge amplifier circuit. Note
that 180 kHz is not exactly matched to the transmit array peak, so
higher outputs could be generated if driving exactly at the chip
peak frequency. The predicted −3 dB beamwidth for this calcula-
tion is 11.4◦ (5.7◦ on either side of center). The peak sensitivity for
the receive array for a normally incident plane wave with a 10 Vdc
bias applied is 1.38 V/Pa at 170 kHz. The predicted receive array
response at 180 kHz is 1.14 V/Pa.
5. Experimental results
The driven frequency responses of all 168 elements in the
transmit and receive arrays were measured using LDV, producing
frequency response plots similar to that seen in Fig. 3. For the
receiver chip, the average value of the resonant frequency of 168
elements is 158.56 kHz and the standard deviation is 4.96 kHz, with
166/168 yield. For the transmitter chip, the average value of the
resonant frequency of 168 elements is 188.40 kHz and the standard
deviation is 10.06 kHz with 163/168 element yield. For highest
performance, element yield should be high, and the resonant
frequencies should all be well matched. As shown experimentally,
the achieved yield and matching is sufficient for long-range
operation. However, improving yield and tightening tolerances on
the resonant frequency would result in improved performance.
A free field measurement was conducted using the pair of cMUT
chips. The transmitter produced a continuous wave acoustic signal
at 180 kHz. The receive array was 10 cm away and always ori-
ented directly toward the transmit array. The transmit array was
rotated in place using a micrometer rotation stage. The RMS receive
response at the drive frequency was recorded at each angle. Fig. 10
shows a comparison between the measured and modeled beam-
pattern for the pair. The agreement is very good, showing a −3 dB
half beamwidth of approximately 6◦ as predicted by the model. The
first sidelobes are down approximately −15 dB as expected.
In operation, there is the need for electromagnetic interference
(EMI) protection to prevent RF communication between the trans-
mit and receive electronics. In order to accomplish this, the cMUT
array chips and electronics are mounted in grounded metal boxes
with shielded signal lines, as shown in Fig. 11.
To investigate the achievable range of the system, range test-
ing was conducted using continuous wave acoustics at 180 kHz, as
shown in Fig. 12. The drive signal was 14 Vpp to the bridge amplifier
at 90 kHz, resulting in acoustics at 180 kHz due to the square law
electrostatics. The DC bias on the receiver side was 10 V. The nickel-
on-glass chip has their angle fixed during range testing. Three
reflector materials were used: plywood, aluminum, and acrylic. The
reflector was oriented orthogonal to the transmit/receive main axis.
Experimental results show a maximum range of 1.5 m as shown
Fig. 13. Received signal power decreases with distance according
to the expected law including geometric spreading and acoustic
absorption [32],
EL = SL50 cm − (7 dB/m)(2D − 50 cm) − 6 dB log2(D/50 cm)
(29)
-40
-20
30
210
60
240
90
270
120
300
150
330
180 0
Fig. 10. Comparison between the modeled (solid line) and measured (open cir-
cles) beampattern for the transmit/receive array in a free field test. Normalized to
maximum pressure (0 dB at peak).

Author's personal copy
46 M. Shin et al. / Sensors and Actuators A 208 (2014) 37– 49
Fig. 11. Photograph of the transmit/receive system including shielding boxes.
where EL is the received echo level in dB, SL50 cm is the source level
at 50 cm, taken from the measured data. 7 dB/m is the single direc-
tion acoustic absorption in air at 180 kHz, and 6 dB is the geometric
spreading per doubling of distance between the source and reflec-
tor. Note that this is 6 dB rather than 3 dB since there is a two
directional travel. D is the distance between the source/receiver
and the reflector.
With D ≥ 1.5 m, the signal decreases below the background
reverberation level (−67 dB Vrms). Each material has the simi-
lar range results. The noisefloor in the diagram is the electronic
noisefloor. Noise level is always dependent on sampling. In this
experiment, the sampling frequency was Fs = 1 MHz and the num-
ber of samples was 220, resulting in a total data acquisition time of
1.0 s per point.
Finally, a computer controlled velocity sled was used to demon-
strate measurable Doppler shifts, as shown in Fig. 14. Control of
the sled velocity was accomplished using a DC motor and optical
shaft encoder. Continuous acoustic waves were again generated by
a stationary transmit array at 180 kHz, reflected off of the moving
aluminum plate at various velocities, and received by the stationary
receive array. The distance to the reflector varies during the test.
At its closest approach the reflector is 3 cm from the sensors. At
its most distant, the reflector is 1 m away. For velocity comparison,
a laser fiber optic velocimeter was used, also reflecting off of the
moving plate.
The Doppler shift for a stationary transmitter/receiver and mov-
ing reflector, at speeds well below the speed of sound, is [32]
�f = fc2vc
(30)
where fc = 180 kHz is the carrier frequency, v is the velocity of the
reflector relative to the transmit/receive arrays, and c is the speed
of sound. A positive Doppler shift indicates motion of the reflec-
tor toward the transducers, and a negative Doppler shift indicates
motion away.
Fig. 15 shows spectrograms of the received ultrasonic signal
for various motions of the reflector. Data was captured at 1 MHz,
with the total number of sampling points N = 220, corresponding to
approximately 1 s of data. The spectrogram uses a 214 point Ham-
ming window with 50% overlap. This is a time window of 0.016 s,
thus the minimum resolvable shift in frequency is �f = 61 Hz which
corresponds to a velocity resolution of 5.8 cm/s. The spectrograms
are presented with the frequency shift noted on the left axis, and
the corresponding velocity v from Eq. (30) on the right axis.
The white dashed line in each plot shows the velocity as mea-
sured by LDV. In the LDV data, there are missing points and drop
outs due to poor reflection at some times. The Doppler measure-
ment of velocity from the cMUT does not exhibit this problem. The
velocity profile measured by the cMUT Doppler matches the LDV
data very well. The velocity command sent to the motor controller
is noted in each panel of the figure, although it is clear from both
the cMUT and LDV data that there is considerable true variation of
the plate velocity around the setpoint, including vibrations of the
plate.
Fig. 12. Diagram and photograph of the range measurement test set up.

Author's personal copy
M. Shin et al. / Sensors and Actuators A 208 (2014) 37– 49 47
0 50 10 0 15 0 20 0-75
-70
-65
-60
-55
-50
-45
-40
-35
-30
Distance to Reflec tor (cm)
Rec
eive
Res
po
nse
(dB
V)
Aluminu mPlywoo dAcryli c
Noise floo r=300 μV/rtHz
Reve rberation Leve l=480 μVrms
@ 180 kHz
Equ ation 29
Fig. 13. Range test result using cMUT array with three reflection materials such as aluminum, plywood, and acrylic.
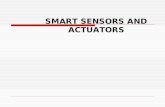
Fig. 15(a) shows a rapid motion of the plate toward the arrays.
Considerable vibration and velocity variation of the plate are
observed. These are real motions of the plate and are accurately
captured by both the ultrasonic and LDV systems. An excellent
match is obtained between the two measurement methods. It is
clear from the figure also that the received response becomes
louder as the reflector approaches, as expected. Fig. 15(b) shows
a case of the reflector moving toward the sensor at a low speed.
In this panel, the resolution of velocity due to the finite time
window is evident. When using a 16 ms time window, as was
done here, the frequency resolution in the FFT is equivalent to a
5.8 cm/s velocity resolution. Fig. 15(c) shows a case of the reflec-
tor moving away from the sensor at an intermediate speed. In the
spectrogram, there are ‘ghost’ bands at harmonics of the shifted
frequency. These were most noticeable in data where the reflec-
tor was moving away from the arrays. This phenomenon is likely
caused by multiple reflections between the transmit/receive arrays
and the reflector. Fig. 15(d) is an example of an intermediate speed
movement toward the sensors with many similarities to panel
(a).
Fig. 14. Diagram and photograph of the test set up used for measuring Doppler velocity response of the system.

Author's personal copy
48 M. Shin et al. / Sensors and Actuators A 208 (2014) 37– 49
Fig. 15. Spectrograms of the received ultrasound signal presented as a Doppler shift away from the carrier frequency of 180 kHz. The corresponding velocity computed from
Eq. (30) is given on the right axis. The dashed white line shows the velocity measured by the laser velocimeter.
6. Conclusion
An ultrasonic velocity sensor using MEMS technology is
explored as a navigational sensor. The system works off of a differ-
ent sensing modality than other rangefinding sensors such as laser,
RF RADAR, or infrared rangefinders. The nickel-on-glass chip was
fabricated with a low cost 3 layer nickel-on-glass surface micro-
machining process. The process is simple to apply with no high
performance material layers that must be carefully tuned. A com-
putational model has been developed that predicts many of the
features of the system response, including excellent models of
absolute system output, damping, bandwidth, and array beampat-
tern.
The system operates at 180 kHz in a continuous wave modal-
ity. Beampattern measurements show a 12◦ −3 dB beamwidth (6◦
either side of center). The sidelobes are 15 dB below the main lobe.
These results agree with theoretical models. The beamwidth of
the system is considerably narrower than most other ultrasonic
rangefinders on the market, which may reduce problems with mul-
tipath reflections. This claim needs further verification.
A velocity sled was constructed and used to demonstrate mea-
surable Doppler shifts at varying velocities. The Doppler shifts
match very well with laser velocimetry measurements of a moving
aluminum plate at velocities up to 0.5 m/s. The velocity resolution
is approximately 6 cm/s in a 60 Hz band (60 velocity updates per
second). Velocity resolution and time resolution can be traded off
dynamically. By using a longer time window and thereby reduc-
ing temporal resolution, velocity resolution can be increased. This
tradeoff can be managed flexibly during signal processing.
Future work on this system will consider frequency modulated
operation for distance measurement, and characterization with
acoustic reflectors that may be relevant for navigation problems.
The system will be further miniaturized and integrated with a
robotic platform for demonstration as an alternative navigational
sensor.
Acknowledgement
This work was funded by the Draper Labs University Research
and Development Program.
References
[1] Y. Ando, S. Yuta, Following a wall by an autonomous mobile robot with asonar-ring, Proceedings of 1995 IEEE International Conference on Robotics andAutomation 1–3 (1995) 2599–2606.
[2] J.A. Castellanos, J.M. Martinez, J. Neira, J.D. Tardos, Simultaneous map buildingand localization for mobile robots: a multisensor fusion approach, 1998 IEEEInternational Conference on Robotics and Automation 1–4 (1998) 1244–1249.
[3] G. Hueber, T. Ostermann, T. Bauernfeind, R. Raschhofer, R. Hagelauer, Newapproach of ultrasonic distance measurement technique in robot applications,in: 2000 5th International Conference on Signal Processing Proceedings, vols.I–III, 2000, pp. 2066–2069.
[4] C.Y. Lee, H.G. Choi, J.S. Park, K.Y. Park, S.R. Lee, Collision avoidance by the fusionof different beam-width ultrasonic sensors, in: 2007 IEEE Sensors, vols. 1–3,2007, pp. 985–988.
[5] O. Manolov, S. Noikov, P. Bison, G. Trainito, Indoor mobile robot control for envi-ronment information gleaning, in: Proceedings of the IEEE Intelligent VehiclesSymposium, 2000, pp. 602–607.
[6] G.C. Anousaki, K.J. Kyriakopoulos, Simultaneous localization and map buildingfor mobile robot navigation, IEEE Robotics & Automation Magazine 6 (1999)42–53.

Author's personal copy
M. Shin et al. / Sensors and Actuators A 208 (2014) 37– 49 49
[7] J.A. Jimenez, J. Urena, M. Mazo, A. Hernandez, E. Santiso, Three-dimensionaldiscrimination between planes, corners and edges using ultrasonic sensors,in: Proceedings of the IEEE Conference on Emerging Technologies and FactoryAutomation, 2003, vol. 2, ETFA’03, 2003, pp. 692–699.
[8] M. Alwan, M.B. Wagner, G. Wasson, P. Sheth, Characterization of infrared range-finder PBS-03JN for 2-D mapping, in: Proceedings of the 2005 IEEE InternationalConference on Robotics and Automation, ICRA, 2005, pp. 3936–3941.
[9] K. Heon-Hui, H. Yun-Su, J. Gang-Gyoo, A study on the environmental map build-ing for a mobile robot using infrared range-finder sensors, in: Proceedings ofIEEE/RSJ International Conference on Intelligent Robots and Systems, 2003, vol.1, IROS, 2003, pp. 711–716.
[10] R. Przybyla, S. Shelton, A. Guedes, R. Krigel, D. Horsley, B. Boser, In-air ultrasonicrangefinding and angle estimation using an array of AlN micromachined trans-ducers, in: Proc. Hilton Head Solid-State Sensors, Actuators and MicrosystemsWorkshop, 3–7 June, 2012, pp. 50–53.
[11] C. Kuratli, H. Qiuting, A CMOS ultrasound range finder microsystem, in: IEEEInternational Solid-State Circuits Conference 2000. Digest of Technical Papers,vol. 455, ISSCC, 2000, pp. 180–181.
[12] K.Y. Lee, N. LaBianca, S.A. Rishton, S. Zolgharnain, J.D. Gelorme, J. Shaw, T.H.-P.Chang, Micromachining applications of a high resolution ultrathick photoresist,Journal of Vacuum Science & Technology B: Microelectronics and NanometerStructures 13 (1995) 3012–3016.
[13] C.-H. Ho, K.-P. Chin, C.-R. Yang, H.-M. Wu, S.-L. Chen, Ultrathick SU-8 moldformation and removal, and its application to the fabrication of LIGA-like micro-motors with embedded roots, Sensors and Actuators A: Physical 102 (2002)130–138.
[14] V.D. Samper, A.J. Sangster, R.L. Reuben, U. Wallrabe, Multistator LIGA-fabricatedelectrostatic wobble motors with integrated synchronous control, Journal ofMicroelectromechanical Systems 7 (1998) 214–223.
[15] M. Despont, H. Lorenz, N. Fahrni, J. Brugger, P. Renaud, P. Vettiger, High-aspect-ratio, ultrathick, negative-tone near-UV photoresist for MEMS applications,in: Proceedings of IEEE Micro Electro Mechanical Systems, MEMS, 1997, pp.518–522.
[16] C.B. Doody, C. Xiaoyang, C.A. Rich, D.F. Lemmerhirt, R.D. White, Modeling andcharacterization of CMOS-fabricated capacitive micromachined ultrasoundtransducers, Journal of Microelectromechanical Systems 20 (2011) 104–118.
[17] M. Bauccio, American Society for Metals, ASM Metals Reference Book, 3rd ed.,ASM International, Materials Park, OH, 1993.
[18] J.K. Luo, S.M. Spearing, N.A. Fleck, W.I. Milne, Young’s modulus of electroplatedNi thin film for MEMS applications, Materials Letters 58 (2004).
[19] M.J. Madou, Fundamentals of Microfabrication: The Science of Miniaturization,CRC Press, Boca Raton, FL, 2002.
[20] Texas Instrument, High Voltage FET-Input Operational Amplifier OPA445 Man-ual.
[21] Z. Zhao, J. Gallman, R.D. White, A MEMS floating element with bump shear stresssensor array on a chip, in: Proceedings of the 51st AIAA Aerospace SciencesMeeting, January 7–10, Grapevine, TX, 2013.
[22] O. Ahrens, A. Buhrdorf, D. Hohlfeld, L. Tebje, J. Binder, Fabrication ofgap-optimized CMUT, IEEE Transactions on Ultrasonics, Ferroelectrics and Fre-quency Control 49 (2002) 1321–1329.
[23] L.L. Beranek, Acoustics, American Institute of Physics for the Acoustical Societyof America, New York, NY, 1986.
[24] C. Biber, S. Ellin, E. Shenk, J. Stempeck, The polaroid ultrasonic ranging system,in: Audio Engineering Society Convention, 1980.
[25] G. Caliano, R. Carotenuto, A. Caronti, M. Pappalardo, cMUT echographicprobes: design and fabrication process, IEEE Ultrasonics Symposium 2 (2002)1067–1070.
[26] P.C. Eccardt, K. Niederer, T. Scheiter, C. Hierold, Surface micromachined ultra-sound transducers in CMOS technology, IEEE Ultrasonics Symposium 2 (1996)959–962.
[27] W.J. Fleming, New automotive sensors—a review, IEEE Sensors Journal 8 (2008)1900–1921.
[28] M. Greenspan, Piston radiator: some extensions of the theory, Journal of theAcoustical Society of America 65 (1979) 608.
[29] M.I. Haller, B.T. Khuri-Yakub, A surface micromachined electrostatic ultrasonicair transducer, IEEE Transactions on Ultrasonics, Ferroelectrics and FrequencyControl 43 (1996) 1–6.
[30] D. Homentcovschi, R.N. Miles, Viscous damping of perforated planar micro-mechanical structures, Sensors and Actuators A: Physical 119 (2005) 544–552.
[31] X. Jin, I. Ladabaum, B.T. Khuri-Yakub, The microfabrication of capacitiveultrasonic transducers, Journal of Microelectromechanical Systems 7 (1998)295–302.
[32] L.E. Kinsler, A.R. Frey, A.B. Coppens, J.V. Sanders, Fundamentals of Acoustics,4th ed., John Wiley and Sons, New York, NY, 2000.
[33] I. Ladabaum, X. Jin, H.T. Soh, A. Atalar, B.T. Khuri-Yakub, Surface microma-chined capacitive ultrasonic transducers, IEEE Transactions on Ultrasonics,Ferroelectrics and Frequency Control 45 (1998) 678–690.
[34] M. Lax, The effect of radiation on the vibrations of a circular diaphragm, Journalof the Acoustical Society of America 16 (1944) 5–13.
[35] D.F. Lemmerhirt, X. Cheng, R.D. White, C.A. Rich, M. Zhang, J. Fowlkes, O.D.Kripfgans, A 32 × 32 capacitive micromachined ultrasonic transducer arraymanufactured in standard CMOS, IEEE Transactions on Ultrasonics, Ferro-electrics and Frequency Control 59 (2012) 1521–1536.
[36] N.V. Myung, D. Park, B. Yoo, P.T. Sumodjo, Development of electroplated mag-netic materials for MEMS, Journal of Magnetics and Magnetic Materials 265(2003) 189–198.
[37] D.T. Porter, Self- and mutual-radiation impedance and beam patterns for flex-ural disks in a rigid plane, Journal of the Acoustical Society of America 36 (1964)1154–1161.
[38] M. Shin, J.S. Krause, P. DeBitetto, R.D. White, Acoustic Doppler velocity mea-surement system using capacitive micromachined ultrasound transducer arraytechnology, Journal of the Acoustical Society of America 134 (2) (2013)1011–1020.
[39] Z. Skvor, On acoustical resistance due to viscous losses in the air gap of elec-trostatic transducers, Acustica 19 (1967) 295–297.
[40] K. Yamashita, K. Iwahashi, Y. Ohmura, M. Okuyama, Ultrasonic position mea-surement using phased array microsensors with resonant frequency variation,IEEE Solid-State Sensors, Actuators and Microsystems Conference, Transduc-ers’07 (2007) 1271–1274.
[41] J.N. Reddy, Theory and Analysis of Elastic Plates and Shells, CRC Press, BocaRaton, FL, 2007.
[42] T.J.R. Hughes, The Finite Element Method, Dover Publications, New York, 2000.[43] B.A. Finlayson, L.E. Scriven, The method of weighted residuals—a review,
Applied Mechanics Reviews 19 (1966) 735–738.[44] B.A. Finlayson, The Method of Weighted Residuals and Variational Principles,
Academic Press, New York, 1972.