SE130B-LECTURE2

of 16
-
Upload
yannis-koutromanos -
Category
Documents
-
view
214 -
download
0
Transcript of SE130B-LECTURE2
-
7/31/2019 SE130B-LECTURE2
1/16
1
LECTURE 2
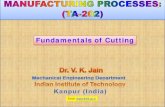
The degrees of freedom (DOF) of a structure are defined as theindependent nodal displacements (translations and rotations) that are
necessary to specify the deformed shape of the structure when
subjected to a load. In this course we will also be considering as
degrees of freedom the nodal displacements which are restrained
(that is, they have a prescribed value, in most cases equal to zero!).
u1
u2
u3
u4
u5u6
u1
u2u3 u4
u5u6
u7u7
u8
u9
u10
10 DOF
6 free
4 fixed
u8
u9
u10
u11
u12
12 DOF
7 free
5 fixed
For a structure, we can define the displacement vector, {U}, and the
force vector, {P}. The displacement vector can be separated into twosubvectors, {Uf}, containing the displacements of the DOFs which are
free (unrestrained), and {Ud}, containing the displacements of the
DOFs which are restrained (fixed). For example, for the truss member
in the above figure, we have
-
7/31/2019 SE130B-LECTURE2
2/16
2
{ } [ ]T
1 2 3 4 5 6 7 8 9 10U u u u u u u u u u u= , and
{ }{ }
{ }
f
d
UU
U
=
, with { } [ ]T
f 1 2 3 4 5 6U u u u u u u= and
{ } [ ]T
d 7 8 9 10U u u u u= . The corresponding nodal force vectors
are { } [ ]T
1 2 3 4 5 6 7 8 9 10P P P P P P P P P P P= , and
{ }{ }
{ }f
d
PP
P
=
, with { } [ ]
T
f 1 2 3 4 5 6P P P P P P P= and
{ } [ ]T
d 7 8 9 10P P P P P= . Since the vector {Pd} contains the nodal
forces corresponding to the restrained DOFs, {Pd} is simply the vector
of nodal reactions for our structure!
The definition of the displacement and load vectors and subvectors for
the frame structure in the figure above is left as an exercise.
NOTE: It is preferable, when we number the DOFs of a structure, to
number all the free DOFs first and then number the restrained DOFs,
exactly as we have done for the truss structure above.
-
7/31/2019 SE130B-LECTURE2
3/16
3
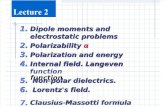
Coordinate Systems
In order to use the matrix method of analysis, we need to establish
appropriate coordinate systems, i.e. sets of axes with respect to which
we express each vector.
Two types of coordinate systems are employed to specify the
structural and loading data: the global (structural) and the local
(member) coordinate system.
The global coordinate system is a system used to solve the entirestructure. This system is employed because when we combine the
stiffness contributions of the various members comprising the
structure, these contributions must all be expressed in the same
coordinate system.
The local coordinate system is defined by axes parallel andperpendicular to the member. This coordinate system is used because
it is more convenient to express the displacements and forces of a
member in the directions normal and perpendicular to the member.
-
7/31/2019 SE130B-LECTURE2
4/16
4
x
yGlobal coordinate system
member2
x1
y1
x2
y2 Localcoordinate
system,member2
The general approach that we will be using throughout the course
can be summarized as follows:
1. Determine the nodes and members (members are also called
elements) of the structure.
2.Obtain the stiffness terms of each element (= form the stiffness
matrix of each element).
3.Appropriately combine the stiffness contributions of the
elements to obtain the stiffness matrix of the entire structure,
called the GLOBAL or STRUCTURAL STIFFNESS MATRIX.4.Solve the structure and obtain the nodal displacements.
5.Go to each member, determine the end forces (using the nodal
displacements and the stiffness matrix of the member) and the
member internal forces (based on equilibrium).
-
7/31/2019 SE130B-LECTURE2
5/16
-
7/31/2019 SE130B-LECTURE2
6/16
6
{ }
1
2
3
4
=
{ }
1
2
3
4
F
FF
F
F
=
Alternatively, we can express the displacements and forces with
respect to the local coordinate system, x.
node i
node j
X
{ }
1
2
3
4
'
''
'
'
=
{ }
1
2
3
4
F'
F'F'
F'
F'
=
By solving the differential equations (and recognizing that, for the
local coordinate system, only the member end forces in the axial
direction are nonzero and the member end displacements in the y-local
axis do not generate any forces), we have:
-
7/31/2019 SE130B-LECTURE2
7/16
7
{ } [ ]{ }F' k ' '= , where [ ]
1 0 1 0
0 0 0 0k '
1 0 1 0L
0 0 0 0
=
The key quantity for the establishment of a coordinate transformation
rule is the angle , for which we can easily verify that:
node I(Xi,Yi)
node j(Xj,Yj)
X
X = j - i
Y=Yj-Yi
( ) ( )2 2
L X Y= + ,X
cosL
= ,Y
sinL
=
Transformation from local to global coordinate system
Let us assume that we want to find the relation between the force and
displacement vectors in the local and global coordinate systems. We
-
7/31/2019 SE130B-LECTURE2
8/16
8
will first examine the displacements. The key towards establishing the
transformation rule for displacements is to apply a unit displacement
for each of the DOFs in the global coordinate system, and then
determine the corresponding displacement values in the localcoordinate system. For example, the following figures show what we
obtain for a unit displacement of node i along each of the two global
directions:
X
Y
1
2
From geometric considerations, we have:
1 1a 1b 1 2' ' ' cos sin = + = +
2 2a 2b 1 2' ' ' sin cos = + = +
In matrix form:
1 1
2 2
' cos sin
' sin cos
=
Similarly, we can obtain for node j:
-
7/31/2019 SE130B-LECTURE2
9/16
9
3 3
4 4
' cos sin
' sin cos
=
And finally, we can collectively write:
{ } [ ]{ }ROT' = , where [ ][ ] [ ][ ] [ ]ROTR 0
0 R
=
,
[ ]cos sin
R
sin cos
=
and [ ]0 0
0
0 0
=
Note that each column i of [ROT] provides the displacements in the
local coordinate system for a unit displacement of DOF i in the local
coordinate system.
Next, we will establish a relation between {F} and {F}. To this
end, we make a cut very close to each of the member ends, i and j. The
element end force components on one side of the cut are taken in the
global coordinate system, while on the other side of the cut they are
taken in the local coordinate system. Then, from the equilibrium
equations for each of the endpoints, we obtain:
-
7/31/2019 SE130B-LECTURE2
10/16
10
node i
node j
X
F2F1
node i
node j
X
end i:
1 1 2 1 1 2F F' cos F' sin 0 F F' cos F' sin + = =
2 1 2 2 1 2F F' sin F' cos 0 F F' sin F' cos = = +
end j:
3 3 4 3 3 4F F' cos F' sin 0 F F' cos F' sin + = =
4 3 4 4 3 4F F' sin F' cos 0 F F' sin F' cos = = +
The four above equations can be cast into matrix form as follows:
{ } [ ] { }T
ROTF F'=
-
7/31/2019 SE130B-LECTURE2
11/16
11
Pairs of transformation equations such as the ones for displacements
and forces:
{ } [ ]{ } ( )ROT' 1 =
{ } [ ] { } ( )T
ROTF F' 2=
Are called contragradient transformations.
So far, we have established the stiffness equation in the element local
coordinate system:
{ } [ ]{ }F' k' '=
Now, if we account for equation (1), we have:
{ } [ ][ ]{ }ROTF' k'=
If we then pre-multiply by [ROT]Tand use equation (2), we have:
{ } [ ] [ ][ ]( ){ } { } [ ]{ }TROT ROTF k' F k = =
-
7/31/2019 SE130B-LECTURE2
12/16
-
7/31/2019 SE130B-LECTURE2
13/16
13
The above expression allows us to establish a matrix transformation
law which gives the basic deformation as a function of the
displacement vector in the local coordinate system:
node i
node j
X
{ } [ ] [ ]
1 1
2 2
1 RBM
3 3
4 4
' '
' '' ' 1 0 1 0
' '
' '
= = =
,
where [ ] [ ]RBM 1 0 1 0 =
Using equilibrium, we can also obtain the relation between the memberforce vector in the local coordinate system and the basic member
force (note that the basic force is tensile):
-
7/31/2019 SE130B-LECTURE2
14/16
14
=
From equilibrium, we can obtain:
1 1F' F'= , 2F' 0= , 3 1F' F'= , 4F' 0=
The above equations can be cast in matrix form as follows:
[ ] { }
1
T2
1 RBM
3
4
F' 1F ' 0
F ' F 'F ' 1
F ' 0
= =
We can once again see that we have a pair of contragradient
transformations:
{ } [ ]{ } ( )RBM' ' 3 =
-
7/31/2019 SE130B-LECTURE2
15/16
15
{ } [ ] { } ( )T
RBMF' F ' 4=
The stiffness equation for the basic member force and deformation is:
{ } { }F' k' ' = , where 11EA
k' k'L
= =
If we substitute equation (3) in the above stiffness equation for the
basic deformation and force, we obtain:
{ } [ ]{ }RBMF' k' ' = , and if we also account for equation (1):
{ } [ ][ ]{ }RBM ROTF' k' = . Finally, if we premultiply by[ROT]
[RBM]Tand we account for equations (4) and (2), we have:
{ } [ ] [ ] [ ][ ]{ }T T
ROT RBM RBM ROTF k' = , and since we also have
{ } [ ]{ }F k= , we can obtain:
[ ] [ ] [ ] [ ][ ] [ ] [ ]T T T
ROT RBM RBM ROTk k' k' = = , where
[ ] [ ][ ] [ ]RBM ROT cos sin cos sin = =
-
7/31/2019 SE130B-LECTURE2
16/16
16
Thus, the global stiffness matrix for a truss member can be obtained
as follows:
[ ] [ ]
cos
sin EAk cos sin cos sin
cos L
sin
=
The introduction of the basic deformation not only facilitates the
expression for the global stiffness matrix of the member, but it alsoallows the direct determination of the members axial force, once the
end displacements in the global coordinate system, {}, are known (as
we will see later during the course, the displacements {} are obtained
after the stiffness equations for the entire structure are solved), we
can directly determine the member axial force using the expression:
{ } [ ]{ } [ ]
1
2
3
4
EAN F' k' cos sin cos sin
L
= = =