
rltool
7
PROJETOS DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL DEPARTAMENTO DE ENGENHARIA ELÉTRICA Aula 3: A Função rltool Introdução Utilizando a função rltool Introdução O Matlab disponibiliza através do control system toolbox um conjunto de funções que são extremamente úteis para o acompanhamento da disciplina. Função Descrição Exemplo feedback Obtém a função de transferência de malha fechada. [nMF,dMF]=feedback(numG,denG,numH,denH,-1) step Obtém a resposta temporal de um sistema descrito por uma função de transferência. step(num,den) ou [y,x,t]=step(1,[1 1]);plot(t,y) rlocus Obtém o LGR a partir da função de transferência de malha aberta do sistema. rlocus(numG,denG) bode Obtém os gráficos de magnidudte e de fase da resposta em freqüência de um sistema descrito por uma função de transferência . bode(num,den) ou [mag,fase,w]=bode(1,[1 1]);magdb=20*log10(mag); subplot(211),semilogx(w,magdb),subplot(212),semilogx(w,fase) margin Obtém as características de estabilidade relativa empregando a resposta em freqüência de um sistema descrito por uma função de transferência. margin(num,den) ou [Gm, Pm, w180 w0db]=margin(num,den) nyquist Obtém o gráfico polar (Nyquist) da resposta em freqüência de um sistema descrito por uma função de transferência . nyquist(num,den) R( R( R( + - s) Y(s) E(s) B(s) + - s) Y(s) E(s) B(s) + - s) Y(s) E(s) B(s) numG denG numH denH Y(s) R(s) Y(s) R(s) nMF dMF Tabela 1: Funções existentes no control system toolbox do Matlab. Professores: Luís Fernando Alves Pereira e José Felipe Haffner 1
-
Upload
adilsondisso -
Category
Documents
-
view
22 -
download
0
Transcript of rltool
PROJETOS DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Aula 3: A Função rltool
Introdução Utilizando a função rltool
Introdução
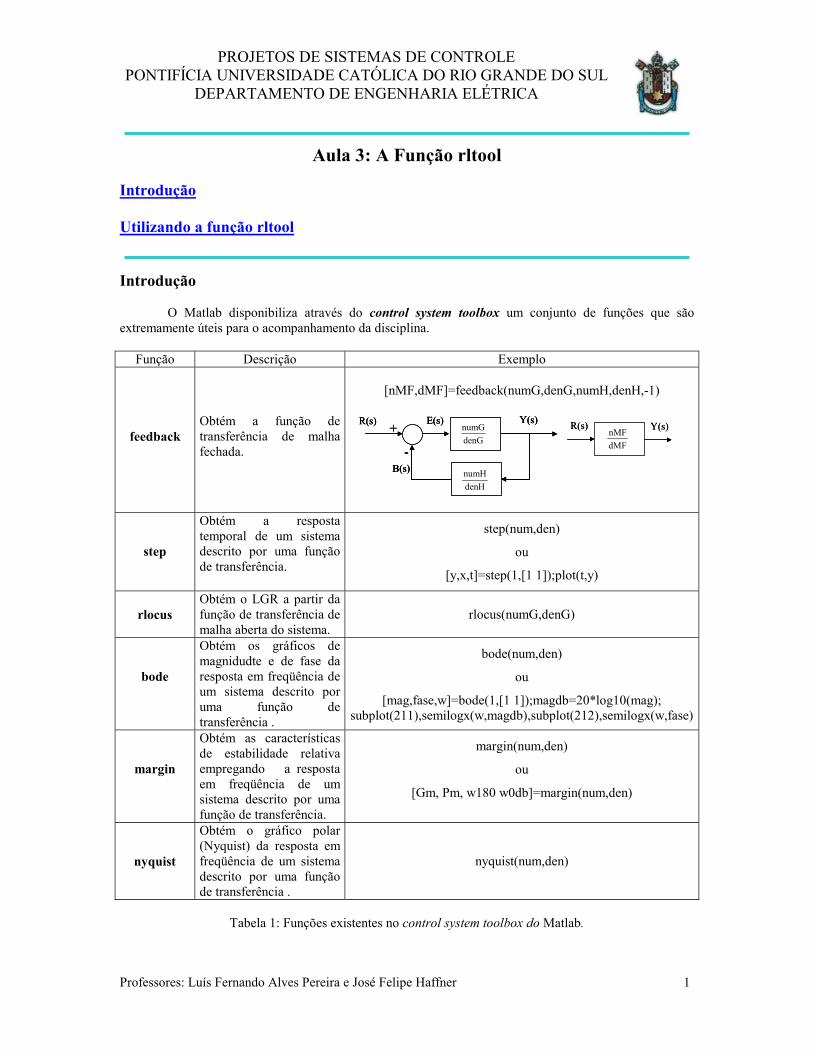
O Matlab disponibiliza através do control system toolbox um conjunto de funções que são extremamente úteis para o acompanhamento da disciplina.
Função Descrição Exemplo
feedback
Obtém a função de transferência de malha fechada.
[nMF,dMF]=feedback(numG,denG,numH,denH,-1)
step
Obtém a resposta temporal de um sistema descrito por uma função de transferência.
step(num,den)
ou
[y,x,t]=step(1,[1 1]);plot(t,y)
rlocus
Obtém o LGR a partir da função de transferência de malha aberta do sistema.
rlocus(numG,denG)
bode
Obtém os gráficos de magnidudte e de fase da resposta em freqüência de um sistema descrito por uma função de transferência .
bode(num,den)
ou
[mag,fase,w]=bode(1,[1 1]);magdb=20*log10(mag); subplot(211),semilogx(w,magdb),subplot(212),semilogx(w,fase)
margin
Obtém as características de estabilidade relativa empregando a resposta em freqüência de um sistema descrito por uma função de transferência.
margin(num,den)
ou
[Gm, Pm, w180 w0db]=margin(num,den)
nyquist
Obtém o gráfico polar (Nyquist) da resposta em freqüência de um sistema descrito por uma função de transferência .
nyquist(num,den)
R(R(R( +
-
s) Y(s)E(s)
B(s)
numGdenG
numHdenH
+
-
s) Y(s)E(s)
B(s)
+
-
s) Y(s)E(s)
B(s)
numGdenG
numHdenH
Y(s)R(s)nMFdMF
Y(s)R(s)nMFdMF
Tabela 1: Funções existentes no control system toolbox do Matlab.
Professores: Luís Fernando Alves Pereira e José Felipe Haffner 1
PROJETOS DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
A partir da versão 5.31, o Matlab possui a função rltool que integra o conjunto de ferramentas
pertencentes ao control system toolbox apresentados na Tabela 3.1. A função rltool é na verdade um ambiente gráfico completo para a análise e projeto de sistemas de controle empregando o método do Lugar Geométrico das Raízes e/ou o método da Resposta em Freqüência. Utilizando a função rltool
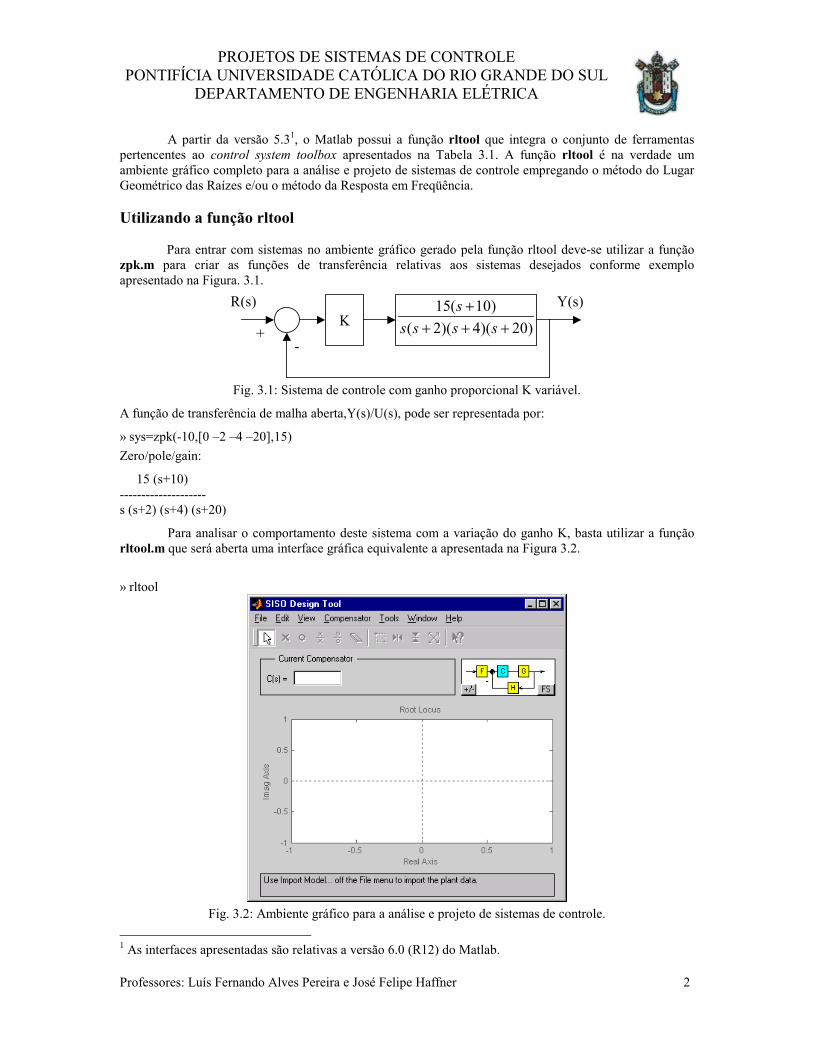
Para entrar com sistemas no ambiente gráfico gerado pela função rltool deve-se utilizar a função zpk.m para criar as funções de transferência relativas aos sistemas desejados conforme exemplo apresentado na Figura. 3.1.
)20)(4)(2()10(15���
�
sssssR(s) Y(s)
K+
-
Fig. 3.1: Sistema de controle com ganho proporcional K variável.
A função de transferência de malha aberta,Y(s)/U(s), pode ser representada por:
» sys=zpk(-10,[0 –2 –4 –20],15) Zero/pole/gain:
15 (s+10) -------------------- s (s+2) (s+4) (s+20)
Para analisar o comportamento deste sistema com a variação do ganho K, basta utilizar a função rltool.m que será aberta uma interface gráfica equivalente a apresentada na Figura 3.2. » rltool
Fig. 3.2: Ambiente gráfico para a análise e projeto de sistemas de controle.
1 As interfaces apresentadas são relativas a versão 6.0 (R12) do Matlab.
Professores: Luís Fernando Alves Pereira e José Felipe Haffner 2
PROJETOS DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
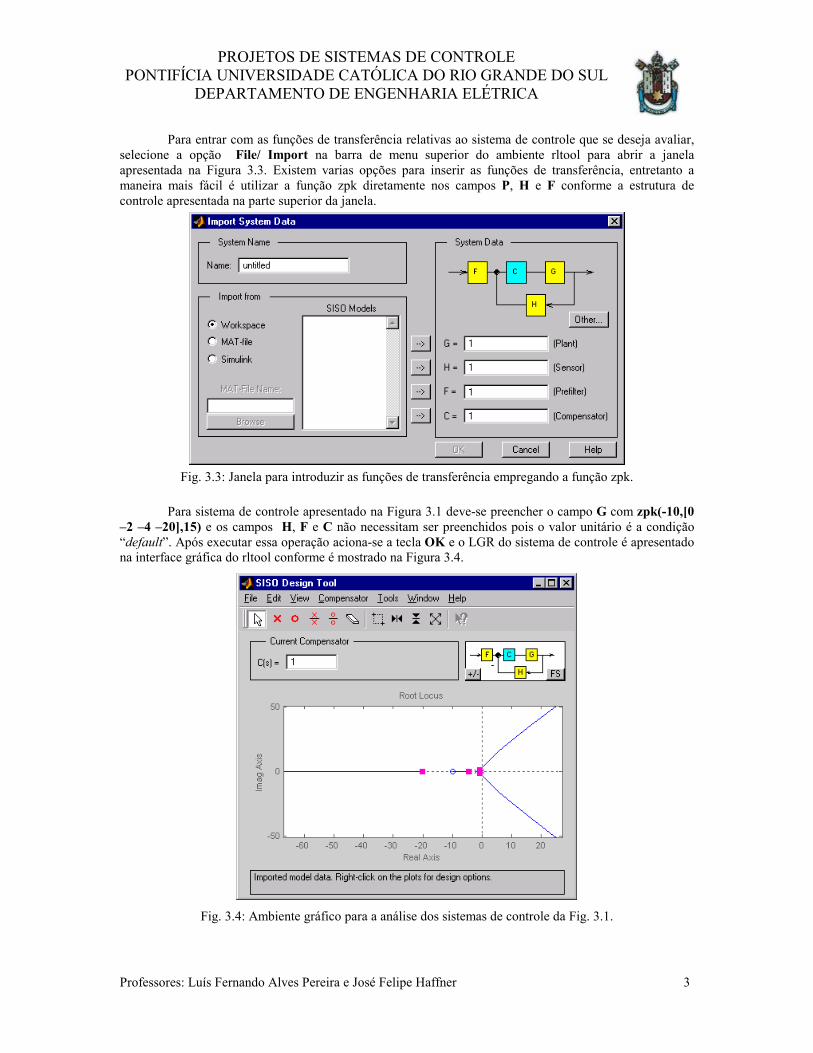
Para entrar com as funções de transferência relativas ao sistema de controle que se deseja avaliar,
selecione a opção File/ Import na barra de menu superior do ambiente rltool para abrir a janela apresentada na Figura 3.3. Existem varias opções para inserir as funções de transferência, entretanto a maneira mais fácil é utilizar a função zpk diretamente nos campos P, H e F conforme a estrutura de controle apresentada na parte superior da janela.
Fig. 3.3: Janela para introduzir as funções de transferência empregando a função zpk.
Para sistema de controle apresentado na Figura 3.1 deve-se preencher o campo G com zpk(-10,[0
–2 –4 –20],15) e os campos H, F e C não necessitam ser preenchidos pois o valor unitário é a condição “default”. Após executar essa operação aciona-se a tecla OK e o LGR do sistema de controle é apresentado na interface gráfica do rltool conforme é mostrado na Figura 3.4.
Fig. 3.4: Ambiente gráfico para a análise dos sistemas de controle da Fig. 3.1.
Professores: Luís Fernando Alves Pereira e José Felipe Haffner 3

PROJETOS DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Para obter o diagrama de Bode de malha aberta selecione a opção View/ Bode Diagram, não
esquecendo de desabilitar a opção View/Root Locus, se objetivo for analisar exclusivamente o diagrama de Bode, conforme mostra a Figura Fig. 3.5.
Fig. 3.5: Diagrama de Bode em malha aberta para o ganho K ajustado em 1.
Para obter o sinal de resposta a uma entrada do tipo degrau unitário selecione a opção Tools/Loop Reponses/Plat Output que uma nova janela é aberta apresentando a opção selecionada, conforme mostra a Figura 3.6.
Fig. 3.6: Resposta temporal a uma entrada do tipo degrau unitário para o ganho K ajustado em 1, cujo o
sistema de controle apresentado na Fig. 3.1.
Professores: Luís Fernando Alves Pereira e José Felipe Haffner 4

PROJETOS DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Na nova janela, LTI Viewer for SISO Design Tool é possível obter várias informações sobre o
gráfico obtido empregando diretamente o mouse, como mostra a Figura 3.7.
Fig. 3.7: Seleção de informações na janela LTI Viewer for SISO Design Tool empregando o mouse.
Inclusive outros gráficos relativos ao sistema de controle podem ser obtidos a partir da seleção do mouse conforme mostra a Figura 3.8.
Fig. 3.8: Seleção de gráficos na janela LTI Viewer for SISO Design Tool empregando o mouse.
Professores: Luís Fernando Alves Pereira e José Felipe Haffner 5
PROJETOS DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
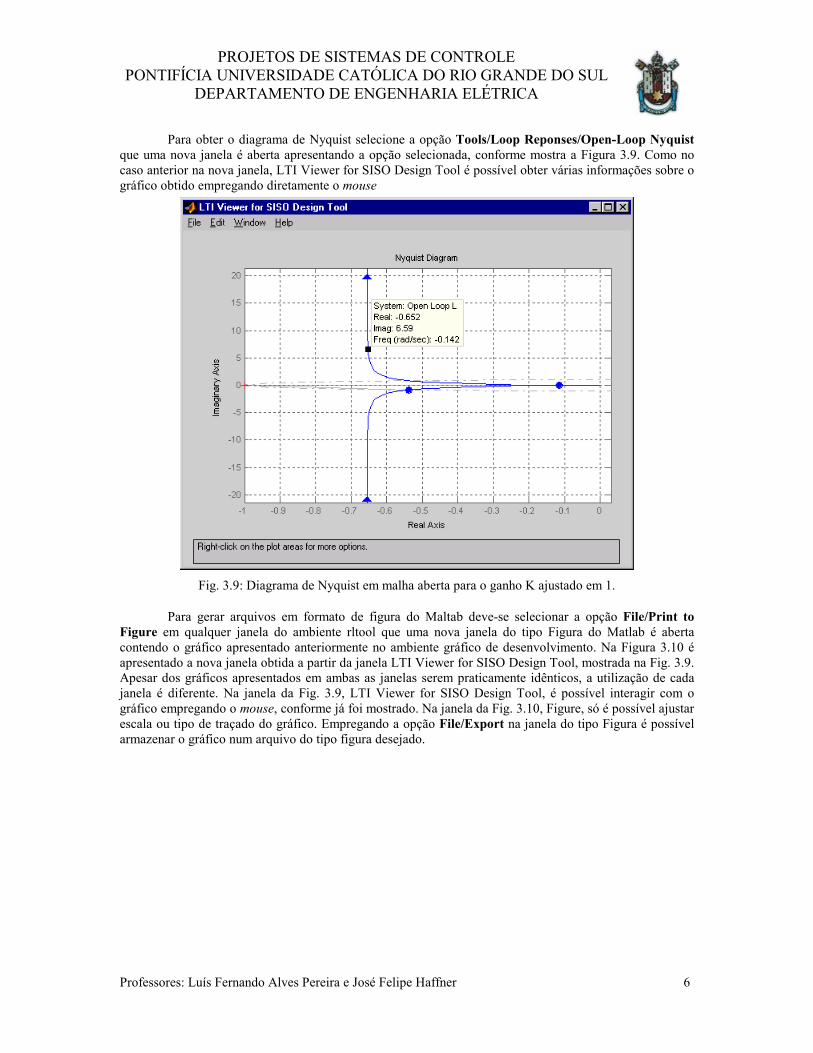
Para obter o diagrama de Nyquist selecione a opção Tools/Loop Reponses/Open-Loop Nyquist
que uma nova janela é aberta apresentando a opção selecionada, conforme mostra a Figura 3.9. Como no caso anterior na nova janela, LTI Viewer for SISO Design Tool é possível obter várias informações sobre o gráfico obtido empregando diretamente o mouse
Fig. 3.9: Diagrama de Nyquist em malha aberta para o ganho K ajustado em 1.
Para gerar arquivos em formato de figura do Maltab deve-se selecionar a opção File/Print to Figure em qualquer janela do ambiente rltool que uma nova janela do tipo Figura do Matlab é aberta contendo o gráfico apresentado anteriormente no ambiente gráfico de desenvolvimento. Na Figura 3.10 é apresentado a nova janela obtida a partir da janela LTI Viewer for SISO Design Tool, mostrada na Fig. 3.9. Apesar dos gráficos apresentados em ambas as janelas serem praticamente idênticos, a utilização de cada janela é diferente. Na janela da Fig. 3.9, LTI Viewer for SISO Design Tool, é possível interagir com o gráfico empregando o mouse, conforme já foi mostrado. Na janela da Fig. 3.10, Figure, só é possível ajustar escala ou tipo de traçado do gráfico. Empregando a opção File/Export na janela do tipo Figura é possível armazenar o gráfico num arquivo do tipo figura desejado.
Professores: Luís Fernando Alves Pereira e José Felipe Haffner 6
PROJETOS DE SISTEMAS DE CONTROLE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
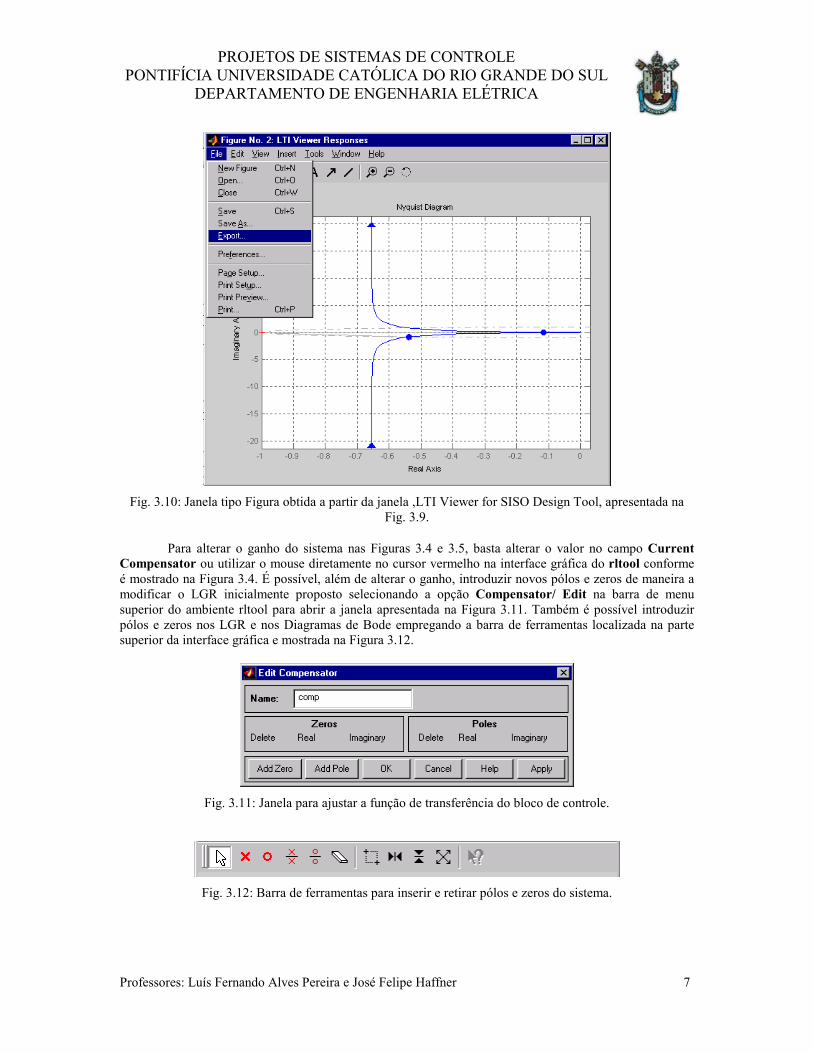
Fig. 3.10: Janela tipo Figura obtida a partir da janela ,LTI Viewer for SISO Design Tool, apresentada na
Fig. 3.9.
Para alterar o ganho do sistema nas Figuras 3.4 e 3.5, basta alterar o valor no campo Current Compensator ou utilizar o mouse diretamente no cursor vermelho na interface gráfica do rltool conforme é mostrado na Figura 3.4. É possível, além de alterar o ganho, introduzir novos pólos e zeros de maneira a modificar o LGR inicialmente proposto selecionando a opção Compensator/ Edit na barra de menu superior do ambiente rltool para abrir a janela apresentada na Figura 3.11. Também é possível introduzir pólos e zeros nos LGR e nos Diagramas de Bode empregando a barra de ferramentas localizada na parte superior da interface gráfica e mostrada na Figura 3.12.
Fig. 3.11: Janela para ajustar a função de transferência do bloco de controle.
Fig. 3.12: Barra de ferramentas para inserir e retirar pólos e zeros do sistema.
Professores: Luís Fernando Alves Pereira e José Felipe Haffner 7




