![MINISTERUL SĂNĂTĂŢII AL REPUBLICII · PDF filetotalul leziunilor articulaţiilor membrului inferior [1]. ... tratamentul artroscopic al acestor ... artroscopică în tratamentul](https://static.fdocuments.net/doc/165x107/5a77542e7f8b9a4b538de442/ministerul-sanatatii-al-republicii-moldova-totalul-leziunilor-articulatiilor.jpg)
REZUMAT / ABSTRACTold.unitbv.ro/Portals/31/Sustineri de doctorat...Cercetări privind sistemele de...
55
MINISTERUL EDUCAŢIEI NAȚIONALE UNIVERSITATEA TRANSILVANIA DIN BRAŞOV BRAŞOV, EROILOR NR. 29, 500036, TEL. 0040-268-413000, FAX 0040-268-410525 Universitatea Transilvania din Brasov Școala Doctorală Interdisciplinară Facultatea de Inginerie Tehnologică și Management Industrial Ing. Ovidiu FILIP Cercetări privind sistemele de acţionare cu muşchi pneumatici a echipamentelor de reabilitare a articulaţiilor membrelor superioare Research Concerning Pneumatic Muscle Based Actuation Systems of Upper Limb Joints Rehabilitation Equipment REZUMAT / ABSTRACT Conducător ştiinţific Prof.dr.ing. Tudor DEACONESCU BRAŞOV, 2017
Transcript of REZUMAT / ABSTRACTold.unitbv.ro/Portals/31/Sustineri de doctorat...Cercetări privind sistemele de...

MINISTERUL EDUCAŢIEI NAȚIONALE
UNIVERSITATEA TRANSILVANIA DIN BRAŞOV
BRAŞOV, EROILOR NR. 29, 500036, TEL. 0040-268-413000, FAX 0040-268-410525
Universitatea Transilvania din Brasov
Școala Doctorală Interdisciplinară
Facultatea de Inginerie Tehnologică și Management Industrial
Ing. Ovidiu FILIP
Cercetări privind sistemele de acţionare cu muşchi
pneumatici a echipamentelor de reabilitare a
articulaţiilor membrelor superioare
Research Concerning Pneumatic Muscle Based
Actuation Systems of Upper Limb Joints Rehabilitation
Equipment
REZUMAT / ABSTRACT
Conducător ştiinţific
Prof.dr.ing. Tudor DEACONESCU
BRAŞOV, 2017

2

3
MINISTERUL EDUCAŢIEI NAȚIONALE
UNIVERSITATEA TRANSILVANIA DIN BRAŞOV
BRAŞOV, EROILOR NR. 29, 500036, TEL. 0040-268-413000, FAX 0040-268-410525
D-lui (D-nei) ..............................................................................................................
COMPONENŢA
Comisiei de doctorat
Numită prin ordinul Rectorului Universităţii Transilvania din Braşov
Nr. ........ din ....................
PREŞEDINTE: Prof.univ.dr.ing. Gheorghe OANCEA
Universitatea Transilvania din Braşov
CONDUCĂTOR ŞTIINŢIFIC: Prof.univ.dr.ing. Tudor DEACONESCU
Universitatea Transilvania din Braşov
REFERENŢI: Prof.univ.dr.ing. Miron ZAPCIU
Universitatea Politehnica Bucureşti
Prof.univ.dr.ing. Cătălin Gabriel DUMITRAŞ
Universitatea Tehnică Gh. Asachi Iaşi
Prof.univ.dr.ing. Romeo CIOARĂ
Universitatea Transilvania din Braşov
Data, ora şi locul susţinerii publice a tezei de doctorat: ............., ora ....., sala
..............
Eventualele aprecieri sau observaţii asupra conţinutului lucrării vă rugăm să le
transmiteţi în timp util, pe adresa Bd. Eroilor 29.
Totodată vă invităm să luaţi parte la şedinţa publică de susţinere a tezei de
doctorat.
Vă mulţumim.

4
PREFAȚĂ
Accidentele prin care se produc traume ale aparatului locomotor au ca urmări, de cele mai
multe ori, diminuarea capacității funcționale a acestuia. O metodă de recuperare des utilizată constă
în aplicarea mișcării pasive continue. Mișcarea pasivă se realizează manual de către un
kinetoterapeut sau mecanic, de un echipament specializat pentru recuperarea membrului afectat,
atunci când bolnavul nu mai dispune de forța sau controlul necesare mișcării respective. Mișcările
repetitive contribuie la recăpătarea controlului asupra mușchilor, previn retracțiile musculare și au
ca scop recuperarea mobilității articulare.
În acest context, teza de doctorat își propune ca obiectiv central realizarea unui echipament
destinat reabilitării articulaţiilor palmei şi articulaţiilor degetelor. Elementele de noutate sunt
reprezentate de mecanismul utilizat pentru mobilizarea palmei și de sistemul de acționare a
mecanismului, acesta fiind realizat cu ajutorul unui mușchi pneumatic.
Caracterul fundamental este evidențiat de studiul teoretic al posibilităţii utilizării unui
mecanism de tip Fin Ray, preluat prin biomimetism din natură, de la aripile înotătoare ale peştilor.
Din punct de vedere experimental, teza de doctorat a avut ca finalitate obţinerea unui nou
echipament de reabilitare care asigură mobilizarea corectă și în siguranță, în limitele fiziologice, a
articulațiilor mâinii, precum şi testarea performanţelor acestuia.
***
Cu ocazia finalizării programului de doctorat doresc să mulțumesc domnului Prof. dr. ing.
Tudor DEACONESCU, conducătorul meu științific, pentru îndrumarea, sprijinul și recomandările
acordate în timpul elaborării tezei de doctorat.
Domnilor profesori referenți, Prof.dr.ing. Gheorghe OANCEA, Prof.dr.ing. Miron ZAPCIU,
Prof.dr.ing. Cătălin Gabriel DUMITRAŞ și Prof.dr.ing. Romeo CIOARĂ le mulțumesc pentru
efortul de a analiza și evalua teza de doctorat și pentru acceptul de a fi membrii ai Comisiei de
Doctorat.
De asemenea, doresc să mulțumesc domnului Prof. dr. ing. Gavrilă CALEFARIU, doamnei
Prof. dr. ing. Adriana FLORESCU, domnului Conf. dr. ing. Mihai IONESCU și doamnei Conf. dr.
ing. Catrina CHIVU pentru sugestiile acordate în timpul elaborării tezei de doctorat.
Mulțumesc domnului Prof. dr. ing. Dorin DIACONESCU pentru informațiile oferite în
domeniul mecanismelor și domnului Prof. dr. ing. Cătălin ALEXANDRU pentru sprijinul oferit în
utilizarea softului Adams.
Pentru suportul și încurajările oferite adresez mulțumiri cadrelor didactice și personalului
tehnic din cadrul Departamentului de Inginerie și Management Industrial.
Nu în ultimul rând doresc să mulțumesc familiei mele pentru înțelegerea și sprijinul oferite în
timpul derulării programului doctoral.

Cercetări privind sistemele de acţionare cu muşchi pneumatici a echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
5
CUPRINS
Pg.
teza Pg.
rezumat
Prefață..................................................................................................................... 5 4
Cuprins.................................................................................................................... 7 5
Introducere ............................................................................................................. 11 11
Partea I. Stadiul actual privind metodele şi echipamentele de reabilitare a
articulaţiilor membrelor superioare
13
13
1. Introducere în kinetologie................................................................................. 13 13
1.1.Kinetoterapie. Kinetoprofilaxie.................................................................. 13
1.2.Istoric ......................................................................................................... 14
1.3.Noţiuni generale......................................................................................... 15
1.3.1. Postura............................................................................................. 15
1.3.2. Poziţii fundamentale......................................................................... 16
1.4. Metode de imobilizare a membrelor superioare premergǎtoare
kinetoterapiei..............................................................................................
17
1.4.1. Imobilizarea articulaţiei mâinii......................................................... 17
1.4.2. Imobilizarea articulaţiei cotului........................................................ 18
1.4.3. Imobilizarea articulaţiei umǎrului..................................................... 18
1.5.Lipsa de mişcare şi influenţa acesteia asupra organismului....................... 19
1.6.Metode de tratament utilizate în kinetoterapie........................................... 21
1.7.Bilanţul articular......................................................................................... 23 13
1.8.Necesitatea utilizǎrii echipamentelor de reabilitare................................... 38 15
2. Echipamente de reabilitare................................................................................ 40 17
2.1.Clasificarea echipamentelor de reabilitare................................................. 41
2.2.Exemple de echipamente de reabilitare. Caracteristici.............................. 42
2.3.Echipamente de reabilitare a mâinii antrenate cu mușchi
fluidici........................................................................................................
57
3. Obiectivele tezei de doctorat............................................................................. 72 18

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
6
Partea II. Studii teoretice privind posibilitatea acţionării cu ajutorul mușchilor
pneumatici a unui echipament de reabilitare a articulaţiilor
membrelor superioare
74
20
4. Analiza unor soluții inovative de structuri mecanice destinate
echipamentelor de reabilitare............................................................................
74
20
4.1. Introducere ................................................................................................ 74
4.2. Efectul Fin Ray.......................................................................................... 75
4.3. Aplicații ale efectului Fin Ray.................................................................. 78
4.4. Concluzii ................................................................................................... 85 20
5. Acționări pneumatice. Mușchi pneumatici....................................................... 86
5.1. Acționări pneumatice. Generalități............................................................ 86
5.2. Mușchi pneumatici..................................................................................... 87
5.2.1. Mușchi pneumatici cu țesătură externă împletită............................. 88
5.2.1.1. Mușchiul McKibben și mușchiul Rubbertuator.................. 88
5.2.1.2. Mușchiul Sleeved Bladder.................................................. 91
5.2.2. Mușchi pneumatici cu plasă.............................................................. 92
5.2.2.1. Mușchiul Yarlott................................................................. 92
5.2.2.2. Mușchiul ROMAC............................................................. 93
5.2.2.3. Muşchii Kukolj................................................................... 94
5.2.3. Mușchi cu țesătură înglobată în membrana elastică......................... 95
5.2.3.1. Mușchiul Morin.................................................................. 95
5.2.3.2. Mușchiul Baldwin............................................................... 97
5.2.3.3. Mușchii Paynter.................................................................. 97
5.2.3.4. Mușchiul de torsiune Kleinwachter.................................... 99
5.2.4. Mușchi plisați.................................................................................... 100
6. Structura, cinematica și modelarea echipamentului pentru reabilitarea
articulaţiilor mâinii............................................................................................
103
21
6.1. Structura mecanismului.............................................................................. 103 21
6.2. Analiza cinematică a sistemului................................................................. 111 22
6.3. Modelarea echipamentului de reabilitate................................................... 117 25
6.4. Calculul forței necesare acționării echipamentului și calculul de
verificare al acestuia...................................................................................
132
6.4.1. Determinarea forței necesare muşchiului pneumatic pentru
ridicarea unui corp cu greutatea de 5N.............................................
132
6.4.2. Verificarea la solicitări mecanice a echipamentului......................... 134

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
7
6.5. Alegerea și verificarea mușchiului pneumatic........................................... 143
Partea III. Cercetări experimentale privind modul de lucru al echipamentului
de reabilitare a articulaţiilor mâinii, acţionat cu ajutorul
muşchilor pneumatici
147
27
7. Standul experimental și modelul fizic al echipamentului destinat reabilitării
palmei................................................................................................................
147
27
7.1. Modelul fizic al echipamentului destinat reabilitării palmei...................... 147 27
7.2. Acționarea pneumatică a echipamentului.................................................. 151 30
7.3. Determinări experimentale......................................................................... 153 32
7.3.1. Determinarea curbei presiune-forță a mușchiului folosit în
construcția echipamentului de reabilitare.........................................
153
32
7.3.2. Cercetări experimentale efectuate asupra echipamentului pentru
reabilitarea palmei.............................................................................
160
38
7.3.2.1. Determinarea unghiurilor de extensie maximă și de flexie
maximă realizate de echipamentul de reabilitare...............
160
38
7.3.2.2. Determinarea unghiului palmă – degete realizat de
echipamentul de reabilitare.................................................
165
43
8. Concluzii și contribuții originale....................................................................... 168 46
8.1. Concluzii generale...................................................................................... 168 46
8.2. Contribuții personale.................................................................................. 171 49
8.3. Dezvoltări viitoare..................................................................................... 172 50
8.4. Valorificarea tezei...................................................................................... 172 50
Bibliografie............................................................................................................. 173 51
Anexa 1, Program de calcul pentru unghiul . ................................................ 180
Anexa 2, Fișier date............................................................................................... 182
Anexa 3, Rezumat.................................................................................................. 188 53
Anexa 4, Curriculum Vitae (româna)................................................................... 189 54
Anexa 5, Curriculum Vitae (engleză)................................................................... 190 55

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
8
Contents
Thesis
pg.
Abstract
pg.
Foreword................................................................................................................. 5 4
Contents................................................................................................................... 7 5
Introduction............................................................................................................. 11 11
Part I. Current stage of the methods and equipment for the recovery of the
upper limb joints
13
13
1. Introduction to kinesiology............................................................................... 13 13
1.1.Kinetotherapy. Kinetoprophylaxy.............................................................. 13
1.2.History ....................................................................................................... 14
1.3.General notions.......................................................................................... 15
1.3.1. Posture.............................................................................................. 15
1.3.2. Fundamental positions...................................................................... 16
1.4. Upper limb immobilization methods prior to kinetotherapy..................... 17
1.4.1. Immobilization of the wrist............................................................... 17
1.4.2. Immobilization of the elbow joint.................................................... 18
1.4.3. Immobilization of the shoulder joint................................................ 18
1.5.Lack of movement and its influence on the body ..................................... 19
1.6.Methods of treatment used in kinetotherapy.............................................. 21
1.7.Joint balance............................................................................................... 23 13
1.8.Need for the use of recovery equipment.................................................... 38 15
2. Recovery equipments........................................................................................ 40 17
2.1.Classification of the recovery equipment................................................... 41
2.2.Examples of recovery equipment. Characteristics..................................... 42
2.3.Hand recovery equipment actuated with fluid muscles............................. 57
3. Objectives of the doctoral thesis....................................................................... 72 18
Part II. Theoretical studies on the possibility to actuate with pneumatic
muscles an equipment for the recovery of the upper limb joints
74
20
4. Analysis on several innovative solutions of mechanical structures for
recovery equipment ..........................................................................................
74
20
4.1. Introduction ............................................................................................... 74

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
9
4.2. Fin Ray effect............................................................................................. 75
4.3. Applications of the Fin Ray effect............................................................ 78
4.4. Conclusions................................................................................................ 85 20
5. Pneumatic actuations. Pneumatic muscles........................................................ 86
5.1. Pneumatic actuations. Generalities............................................................ 86
5.2. Pneumatic muscles..................................................................................... 87
5.2.1. Pneumatic muscles with external braided netting............................. 88
5.2.1.1. McKibben muscle and Rubbertuator muscle...................... 88
5.2.1.2. Sleeved Bladder muscle...................................................... 91
5.2.2. Pneumatic muscles with mesh.......................................................... 92
5.2.2.1. Yarlott muscle..................................................................... 92
5.2.2.2. ROMAC muscle................................................................. 93
5.2.2.3. Kukolj muscles................................................................... 94
5.2.3. Muscles with fabric embedded in elastic membrane........................ 95
5.2.3.1. Morin muscle...................................................................... 95
5.2.3.2. Baldwin muscle.................................................................. 97
5.2.3.3. Paynter muscles.................................................................. 97
5.2.3.4. Kleinwachter torsional muscle........................................... 99
5.2.4. Pleated muscles................................................................................. 100
6. Structure, kinematics and modelling of the equipment for wrist
recovery.............................................................................................................
103
21
6.1. Structure of the mechanism........................................................................ 103 21
6.2. Kinematic analysis of the system............................................................... 111 22
6.3. Modelling of the recovery equipment........................................................ 117 25
6.4. Calculation of the required force so as to actuate the equipment and its
check calculation........................................................................................
132
6.4.1. Determining the required force for the pneumatic muscle to lift a
body weighing 5N.............................................................................
132
6.4.2. Equipment check at mechanical stresses.......................................... 134
6.5. Choice and check of the pneumatic muscle............................................... 143
Part III. Experimental research on the operation mode of the equipment for
the recovery of the wrist, actuated with pneumatic muscles
147
27
7. Experimental stand and physical model of the equipment for palm recovery.. 147 27

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
10
7.1. Physical model of the equipment for palm recovery.................................. 147 27
7.2. Pneumatic actuation of the equipment....................................................... 151 30
7.3. Experimental determinations...................................................................... 153 32
7.3.1. Determining the pressure-force curve of the muscle used in
building the recovery equipment......................................................
153
32
7.3.2. Experimental researches on the equipment for palm
recovery............................................................................................
160
38
7.3.2.1. Determining the maximal extension and maximal flexion
angles made by the recovery equipment.............................
160
38
7.3.2.2. Determining the palm – finger angle made by the
recovery equipment............................................................
165
43
8. Conclusions and personal contributions............................................................ 168 46
8.1. General conclusions................................................................................... 168 46
8.2. Personal contributions................................................................................ 171 49
8.3. Future developments................................................................................. 172 50
8.4. Thesis enhancement................................................................................... 172 50
Bibliography............................................................................................................ 173 51
Appendix 1, Computing program for the angle . .......................................... 180
Appendix 2, Data file............................................................................................. 182
Appendix 3, Abstract............................................................................................. 188 53
Appendix 4, Curriculum Vitae (Romanian).......................................................... 189 54
Appendix 5, Curriculum Vitae (English).............................................................. 190 55

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
11
INTRODUCERE
Domeniul echipamentelor de reabilitare prin mișcare pasivă continuă este bine reprezentat în
țările dezvoltate, aceste echipamente putând conduce la o îmbunătățire a vieții celor suferinzi și a
activităţii celor care îngrijesc acești bolnavi. Echipamentele de reabilitare conduc la o recuperare
sau îmbunătățire mai rapidă a anumitor deficiențe, având ca efect creșterea calității vieții acestor
persoane și/sau reintegrarea socială a bolnavului. Din acest punct de vedere, Teza de doctorat se
integrează în tematica preocupărilor la nivel mondial privind îmbunătățirea condițiilor de viață.
Echipamentele de reabilitare comercializate până în acest moment sunt, în majoritate,
acționate cu ajutorul motoarelor electrice. În ultimii ani, pe plan mondial, se observă o creştere a
preocupărilor care au ca obiectiv studierea acționărilor pneumatice destinate echipamentelor de
reabilitare. În acest sens, această teză de doctorat își propune să conceapă, pe baza cercetărilor
teoretice și experimentale, un nou echipament reabilitare, a cărui acționare să fie realizată cu
ajutorul unui mușchi pneumatic.
Teza de doctorat este alcătuită din 8 capitole, grupate în 3 parți, conţinând 191 pagini, care
cuprind 263 figuri, 20 de relații matematice și 104 referințe bibliografice.
Partea I, denumită „Stadiul actual privind metodele şi echipamentele de reabilitare a
articulaţiilor membrelor superioare” cuprinde 3 capitole.
În Capitolul 1, intitulat “Introducere în kinetologie”, se prezintă un scurt istoric al
kinetoterapiei, influența imobilizării asupra organismului uman, metode de tratament utilizate în
kinetoterapie, la final prezentându-se mișcările pe care le realizează membrul superior (umăr, cot,
palmă, degete) și amplitudinile acestora.
În Capitolul 2 – denumit „Echipamente de reabilitare” – sunt prezentate mai multe
echipamente și aparate utilizate în kinetoterapie destinate creșterii forței musculare și îmbunătățirii
activității motrice a membrelor superioare.
Capitolul 3, cu titlul „Obiectivele tezei de doctorat” enunţă scopul principal al Tezei şi
anume realizarea unui echipament performant destinat reabilitării palmei. Obiectivele derivate
prezintă domeniile de cercetare care vor fi abordate în tematica tezei de doctorat.
Partea a II-a, „Studii teoretice privind posibilitatea acţionării cu ajutorul mușchilor
pneumatici a unui echipament de reabilitare a articulaţiilor membreleor superioare”, cuprinde
capitolele 4, 5 și 6.
Capitolul 4 este intitulat „Analiza unor soluţii inovative de structuri mecanice destinate
echipamentelor de reabilitare”. În acest capitol se prezintă efectul Fin Ray și se descrie modalitatea

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
12
de obţinere practică a acestui efect folosind diferite structuri mecanice. Capitolul mai cuprinde
diferite aplicații ale efectului Fin Ray, la finalul său realizându-se o clasificare originală a
sistemelor de tip Fin Ray.
Capitolul 5 – “Acționări pneumatice. Mușchi pneumatici” – se axează pe prezentarea
diferitelor tipuri de mușchi fluidici care pot fi utilizaţi pentru acționarea noului echipament de
reabilitare a articulațiilor palmei.
În Capitolul 6 – “Structura, cinematica și modelarea echipamentului pentru reabilitarea
articulaţiilor mâinii” - se prezintă structura mecanismului care va mobiliza palma în timpul
realizării exercițiilor de recuperare. Mecanismul este o structură elastică, de tip Fin Ray asimetrică.
Această asimetrie este necesară deoarece degetele și palma au amplitudini diferite de mișcare.
Pentru determinarea mărimii unghiurilor de rotație ale mecanismului s-a conceput modelul
matematic al acestuia, valorile determinându-se cu ajutorul softului Matlab. S-a dezvoltat apoi
modelul tridimensional al mecanismului în mediul ProEngineer. În acest program s-a realizat
analiza cinematică a mecanismului, rezultatele acesteia confirmând valorile obținute prin modelarea
matematică a mecanismului. Pe baza modelului tridimensional al echipamentului, cu ajutorul
programului Adams, s-a determinat apoi forța necesară rotirii palmei. În ultima parte a acestui
capitol s-a realizat analiza cu element finit a componentelor echipamentului, determinându-se
tensiunile și deformările maxime ale componentelor principale.
Partea a III-a, „Cercetări experimentale privind modul de lucru al echipamentului de
reabilitare a articulaţiilor mâinii, acţionat cu ajutorul muşchilor pneumatici” conține capitolele 7 și
8.
Capitolul 7 – „Standul experimental și modelul fizic al echipamentului destinat reabilitării
palmei” – prezintă, în prima parte, structura mecanică, schema pneumatică și conexiunile cu
calculatorul ale echipamentului destinat reabilitării palmei. Studiile experimentale ocupă restul
acestui capitol. Experimentele s-au realizat folosind diferite presiuni de alimentare, urmărindu-se
variaţia unghiurilor mecanismului în funcție de presiune.
În Capitolul 8 – „Concluzii şi contribuţii personale” – sunt enumerate contribuțile originale și
rezultatele obținute de autorul tezei. Se evidenţiază direcțiile de dezvoltare ulterioară și se prezintă
modalităţile de valorificare a rezultatelor tezei.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
13
PARTEA I. STADIUL ACTUAL PRIVIND METODELE ŞI
ECHIPAMENTELE DE REABILITARE A ARTICULAŢIILOR
MEMBRELOR SUPERIOARE
1. Introducere în kinetologie
1.7. Bilanţul articular
Prin bilanţ articular se înţelege stabilirea deplasărilor maxime ale articulaţiilor în planele de
referinţǎ transversal, frontal și sagital. Planele de referinţǎ sunt suprafeţe care secţioneazǎ imaginar
corpul omenesc sub o anumitǎ incidenţǎ, orientǎrile celor trei plane putând fi vǎzute în figura 1.10:
Fig. 1.10 Planele anatomice de referinţǎ
c) Articulaţiile mâinii
Pentru a înţelege articulaţiile mâinii trebuie cunoscută structura osoasă a acesteia (Fig. 1.30).

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
14
Fig. 1.30 Structura osoasă a mâinii
În figura de mai sus se pot observa urmǎtoarele articulaţii:
articulaţia radiocarpiană – se realizează între radius şi rândul proximal al carpului,
articulaţiile intercarpiene – se realizează între cele două rânduri de oase ale
carpului şi între oasele din acelaşi rând,
articulaţiile carpometacarpiene – sunt articulaţiile dintre oasele carpului şi oasele
metacarpiene,
articulaţiile degetelor sunt formate la rândul lor din:
o articulaţii metacarpofalangiene – ce se realizează între oasele
metacarpiene şi oasele proximale ale falangelor.
o articulaţii interfalagiene – ce se realizează între falangele proximale şi cele
mijlocii - numite articulaţii proximale - şi articulaţiile dintre falangele
mijlocii şi cele distale – numite articulaţii distale.
Mişcările pumnului sunt executate de articulaţia mediocarpiană după cum urmează:
flexia pumnului sau flexia palmară – se obţine prin rotirea palmei în sens volar.
Poziţia de zero se obţine atunci când antebraţul este flexat la 90º şi în pronaţie

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
15
(Fig. 1.31). Unghiul maxim de rotaţie este de 90º conform lucrării [SBE87] sau
80º, conform lucrării (Fig. 1.32) [SID09].
extensia pumnului sau dorsiflexia - se obtine prin rotirea palmei în sens dorsal.
Unghiul maxim de rotaţie este de 70º conform lucrărilor [SBE87] şi [SID09] (Fig.
1.33)
Fig. 1.31 Poziţia de zero
Fig. 1.32 Flexia pumnului
Fig. 1.33 Extensia pumnului
1.8. Necesitatea utilizării echipamentelor de reabilitare
Echipamentele de reabilitare sunt foarte importante în cazul kinetoterapiei pasive.
Kinetoterapia pasivă este realizată de kinetoterapeut cu sau fără ajutorul echipamentelor de

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
16
reabilitare. Utilizarea echipamentelor de reabilitare uşurează munca terapeutului, mobilizarea
membrului afectat fiind realizată de aceste echipamente după setarea parametrilor de mișcare.
Marea majoritate a echipamentelor care se comercializează în acest moment permit programarea
diferitelor exerciţii cu deplasări şi viteze adaptate fiecărui pacient.
Tratamentul kinetoterapeutic se realizează în spitale sau cabinete particulare de specialitate.
Bolnavii care au nevoie de un tratament kinetoterapeutic îndelungat pot urma tratamentul şi acasă.
În cazul în care pacientul nu îşi poate mobiliza singur membrul bolnav la domiciliu, exerciţiile de
kinetoterapie pasivă pot fi realizate de un alt membru al familiei sau, în cel mai rǎu caz, ele sunt
întrerupte şi reluate la o nouă internare în spital. Întreruperea exerciţiilor poate conduce la
imobilizări definitive şi, în cazul celor care sunt imobilizaţi la pat, la tulburări la nivel
cardiovascular, demineralizări osoase, hipotrofie musculară etc.
Utilizarea echipamentelor de reabilitare poate evita situaţiile amintite mai sus. După o
instruire corespunzătoare, bolnavul poate folosi echipamentul pentru a executa exerciţiile
recomandate de kinetoterapeut. În acest caz bolnavul îşi poate modifica singur parametrii
exerciţiilor (amplitudinea mişcării, viteza acesteia, timpul de pauză între cicluri), în conformitate cu
evoluţia stării sale de sănătate. Programarea executării exerciţiilor este mult mai flexibilă, deoarece
ea nu mai este legată de programul kinetoterapeutului.
Folosirea echipamentelor de recuperare în spitale poate conduce la o descărcare a activităţii
kinetoterapeuţilor şi îndreptarea atenţiei acestora spre cazurile mai grave. Supravegherea bolnavilor
care îşi execută singuri exerciţiile se poate realiza aşadar cu mai puţine cadre specializate.
Kinetoterapia pasivă se adresează aparatului locomotor, sistemului cardiovascular, sistemului
neurologic şi sistemului respirator.
Echipamentele de reabilitare se adresează în special aparatului locomotor şi afecţiunilor
sistemului nervos ce influenţeazǎ aparatul locomotor.
Mobilizările pasive se utilizează în cazul fracturilor care necesită sau nu extensie continuă, în
cazul afecţiunilor reumatismale şi a celor neurologice. În cazul afecţiunilor neurologice, deşi
tratamentul este de lungă durată, bolnavul îşi poate recupera aproape în totalitate mobilitatea
pierdută.
În cazul discopatiei lombare joase kinetoterapia pasivă se va orienta spre întărirea
musculaturii coloanei vertebrale şi corectarea posturii corpului.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
17
2. Echipamente de reabilitare
Concluzii
În urma analizei efectuate în capitolele precedente se desprind următoarele concluzii:
interesul omului față de kinetologie a apărut din cele mai vechi timpuri, observându-se
faptul că anumite posturi și mișcări ameliorează durerile, iar exercițiile fizice fortifică
organismul și cresc capacitatea acestuia de a se regenera după boală.
lipsa de mișcare conduce la scăderea metabolismului, afecțiuni ale aparatului
locomotor, circulator și respirator. Din aceasta cauză, mobilizările pasive se
recomandă atât în cazul pacienților cu deficiențe locomotorii recuperabile, cât și
pacienților cu deficiențe locomotorii irecuperabile.
mobilizarea pasivă presupune cunoașterea biomecanicii cazului, mișcările executându-
se pe direcții fiziologice.
mobilizările articulațiilor, pasive sau active, previn depunerile articulare și adeziunile
tendinoase care pot să apară în cazul imobilizării prelungite și care au ca efect
reducerea mobilității articulațiilor.
mobilizarea articulațiilor are ca efect atenuarea durerii, perioada de recuperare se
scurtează, iar costurile utilizate pentru tratarea bolnavului scad.
utilizarea echipamentelor de reabilitare permite tratarea mai multor pacienți sub
supravegherea unui kinetoterapeut. Echipamentele de reabilitare pot fi utilizate atât în
centre de reabilitare cât și la domiciliul bolnavului.
majoritea echipamentelor de reabilitare a membrelor superioare, comercializate în
acest moment, folosesc motoarele electrice pentru generarea mișcării de rotație.
vitezele de rotație sunt mici, valorile acestora fiind cuprinse între 0,5º/s ÷ 3º/s,
studiind brevetele publicate în ultimii ani, se observă apariția unor echipamente noi de
reabilitare cu acționare pneumatică.
în urma studierii acestor echipamente s-a observat faptul că, exceptând articulațiile
degetelor, pentru celelalte articulații se folosește același tip de mecanism pentru
mobilizarea segmentelor cu deficiențe.
în general, echipamentele de reabilitare folosesc o cuplă de rotație care este aliniată cu
articulația pe care urmează să o mobilizeze.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
18
în cazul articulațiilor degetelor mecanismul este mai complex. Acesta are în structura
lui mai multe cuple de rotație, rotațiile cuplelor fiind dependente între ele.
deoarece flexia maximă a palmei se obține extinzând concomitent şi degetele, iar
extensia maximă a palmei se realizează cu degetele flectate, se propune realizarea unui
nou echipament pentru mobilizarea simultană a articulației palmei (articulația
radiocarpiană) și a articulației metacarpofalangiană a degetelor.
3. OBIECTIVELE TEZEI DE DOCTORAT
Cunoscute fiind tendințele existente la nivel mondial în ceea ce priveşte construcţia
echipamentelor de reabilitare, obiectivul principal al tezei de doctorat îl reprezintă conceperea unui
echipament pentru reabilitarea membrului superior, destinat mobilizării simultane a palmei și a
degetelor, acționarea fiind realizată cu un mușchi pneumatic.
Noutatea acestui echipament de reabilitare constă în mobilizarea simultană a articulației
palmei și a articulațiilor metacarpofalangiene, acționarea echipamentului realizându-se cu ajutorul
unui mușchi pneumatic.
Cercetările teoretice realizate asupra mecanismului de tip Fin Ray, cel care mobilizează palma
și degetele, urmate de cercetările experimentale realizate asupra echipamentului de reabilitare,
acționat cu ajutorul unui mușchi pneumatic, determină caracterul fundamental al temei de cercetare.
Caracterul aplicativ al tezei de doctorat constă în realizarea unui prototip al echipamentului de
reabilitare, a structurii sale mecanice și a circuitelor pneumatice de acţionare, pe care să se poată
testa performanţele acestuia.
Obiectivul principal va fi îndeplinit prin atingerea următoarelor obiective specifice:
1. Realizarea unui studiu cu privire la stadiul actual al metodelor şi echipamentelor de
reabilitare a articulaţiilor membrelor superioare. Acesta va cuprinde următorii paşi:
prezentarea unor noțiuni de kinetoterapie
studiul lipsei de mișcare și influența acesteia asupra organismului
studiul metodelor de tratament utilizate în kinetoterapie
analiza bilanțului articular al membrului superior
determinarea necesităţii utilizării echipamentelor de reabilitare
prezentarea unor echipamente de reabilitare destinate membrelor superioare.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
19
2. Studii teoretice privind posibilitatea acţionării cu ajutorul mușchilor pneumatici a unui
echipament de reabilitare a articulaţiilor membrelor superioare. Această analiză se va realiza
parcurgându-se următoarele etape:
a. Analiza unor soluții inovatoare de structuri mecanice:
studiul efectului Fin Ray
aplicații ale efectului Fin Ray
b. Acționări pneumatice:
mușchi pneumatici – diferite variante constructive
c. Structura cinematică și modelarea echipamentului:
schema structurală a mecanismului propus pentru susținerea și deplasarea palmei
analiza cinematică a mecanismului
modelarea matematică a mecanismului utilizând softul Matalb
modelarea CAD a mecanismului propus utilizând softul ProEngineer
calculul forței necesare acționării echipamentului de reabilitare
analiza cu element finit a componentelor echipamentului
3. Studiul privind modul de lucru al echipamentului de reabilitare a articulaţiilor mâinii, acţionat
cu ajutorul muşchilor pneumatici:
prezentarea structurii mecanice,
conceperea și realizarea instalației pneumatice,
ridicarea caracteristicii forță – presiune a mușchiului utilizat
trasarea curbei presiune – unghi pentru articulația palmei
trasarea curbei presiune – deplasare cremalieră
trasarea curbei presiune – unghi pentru articulația degetelor
La finalul tezei de doctorat se vor prezenta concluziile care se desprind în urma
experimentelor realizate, se vor enumera contribuţiile personale și se vor trasa noi direcții de
cercetare, care pot fi dezvoltate pornind de la echipamentul de reabilitare conceput şi studiat.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
20
PARTEA II. STUDII TEORETICE PRIVIND POSIBILITATEA ACŢIONĂRII
CU AJUTORUL MUȘCHILOR PNEUMATICI A UNUI
ECHIPAMENT DE REABILITARE A ARTICULAŢIILOR
MEMBRELOR SUPERIOARE
4. ANALIZA UNOR SOLUŢII INOVATIVE DE STRUCTURI MECANICE
DESTINATE ECHIPAMENTELOR DE REABILITARE
4.4. Concluzii
Pornind de la exemplele prezentate mai sus, în continuare se poate face următoarea clasificare
a sistemelor de tip Fin Ray:
- din punctul de vedere al deformării, structurile Fin Ray pot fi:
o plane
o spaţiale
- din punctul de vedere al structurii pot fi:
o cu nervuri
o fără nervuri (structurile care au în componență două elemente elastice)
- din punctul de vedere al numărului de elemente elastice:
o cu un element elastic şi unul sau două elemente de tracțiune
o cu două elemente elastice
- din punctul de vedere al forței de acționare pot fi:
o forțe de tracțiune sau compresiune
o forțe care acţionează transversal pe elementul elastic
- din punctul de vedere al realizării structurale acestea pot fi:
o simetrice
o asimetrice
Alte concluzii care se desprind din analiza exemplelor prezentate sunt următoarele:
- nervurile transversale asigură o deformare a întregului element elastic și cu ajutorul lor se
pot realiza structuri lungi cu efect Fin Ray.
- forța care deformează structura trebuie să formeze un anumit unghi cu elementul elastic
pentru a realiza momentul încovoietor. În acest scop, construcţia trebuie să aibă o formă
triunghiulară în cazul structurii plane și o formă piramidală în cazul structurii spațiale.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
21
Întrucât teza de doctorat îşi propune studiul echipamentelor de reabilitare a membrelor
superioare având o construcţie bazată pe structuri de tip Fin Ray, acţionate de muşchi pneumatici, în
continuare se va studia în detaliu acest tip de acționare.
6. STRUCTURA, CINEMATICA ȘI MODELAREA ECHIPAMENTULUI
PENTRU REABILITAREA ARTICULAŢIILOR MÂINII
În acest capitol se va prezenta structura echipamentului pentru reabilitarea articulației mâinii,
se va studia cinematica mecanismului care mobilizează palma în timpul exerciţiului de reabilitare şi
se va modela un asemenea sistem.
6.1. Structura mecanismului
În figura 6.3 este prezentată schema structurală a mecanismului propus pentru susținerea și
mobilizarea palmei care trebuie reabilitată.
Fig. 6.3 Schema structurală a mecanismului propus pentru suportul palmei
Mecanismul care are rolul de susținere și mobilizare a palmei este compus din două
mecanisme patrulater. Mecanismele sunt legate între ele prin intermediul unor arcuri torsionale.
Aceste arcuri sunt plasate în zona cuplelor de rotație B și C, cuplând elastic elementele rigide 1 și 5
(balansierul AB cu balansierul BE), respectiv elementele rigide 7 și 3 (balansierul FC cu balansierul
Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
22
CD). Lungimea balansierului AB este dată de distanța dintre articulația pumnului și articulațiile
metacarpofalangiene, iar distanța BE reprezintă lungimea dintre articulațiile metacarpofalangiene și
articulațiile proximale.
Flexia maximă a palmei se obține în cazul extensiei degetelor, iar extensia maximă a palmei
se realizează în cazul în care degetele sunt flexate. Mecanismul propus respectă această mișcare
naturală a palmei, deoarece rotirea în sus a balansierului AB determină rotirea în sens contrar a
balansierului BE.
6.2.Analiza cinematică a sistemului
Pentru dimensionarea mecanismului se pleacă de la următoarele constrângeri:
balansierul AB trebuie să se rotească în sus cu 70° față de orizontală şi cu 80° în jos față de
orizontală;
lungimile balansierelor AB și BE depind de conformația (dimensiunile) palmei bolnave.
Au fost adoptate următoarele valori: AB = 70 mm și BE = 40 mm.
Determinarea celorlalte dimensiuni ale mecanismului patrulater s-a realizat prin simularea
funcționării sistemului utilizând softul Pro/Engineer. În urma acestor simulări s-au obținut
următoarele dimensiuni: BC = 70 mm, CD = 70 mm, CF = 25 mm, FE = 45 mm, distanța AD
măsurată pe verticală, Adv = 70 mm, iar pe orizontală Adh = 5 mm, [FIL17b].
Folosind teorema cosinusului în triunghiurile ABD și BCD, se pot scrie următoarele relații
pentru mecanismul ABCD, [FIL17b]:
(6.4)
În mod identic, în mecanismul patrulater BEFC, utilizând teorema cosinusului în triunghiurile
BCE și CEF se obțin relațiile:
(6.5)

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
23
Pentru ca mecanismul patrulater BCFE să funcționeze corect, este necesar ca arcurile
torsionale montate în cuplele B și C să fie tensionate pe toată zona de lucru a acestui mecanism
(90°). Din această cauză, se vor folosi arcuri cu brațele dispuse la 270°, zona de lucru fiind cuprinsă
între 90° - 180° (Fig 6.12).
Fig. 6.12 Arc torsional cu braţele dispuse la 270°
Pentru ca biela EF să se afle în echilibru, trebuie ca forțele şi momentele care acţionează
asupra ei să se anuleze. În figura 6.13 sunt prezentate forțele şi momentele care acționează asupra
bielei EF ca urmare a utilizării arcurilor torsionale.
Fig. 6.13 Forțele şi momentele introduse de arcuri în mecanism
Momentul de torsiune din cupla B are valoarea:
(6.6)
în care Fe – forţa aplicată în punctul E, bb – brațul forței Fe, K – constanta elastică a arcului.
Momentul de torsiune din cupla C se calculează cu relaţia:
(6.7)

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
24
unde Ff este forţa aplicată în punctul F, bc – brațul forței Ff.
Pentru ca biela EF să fie în echilibru trebuie ca forțele Fe și Ff să fie egale:
°
°
(6.8)
unde:
(6.9)
(6.10)
Din relaţiile de mai sus rezultă:
(6.11)
Unghiurile și pot fi exprimate ca o sumă de unghiuri care pot fi determinate din
cele două mecanisme patrulater:
(6.12)
(6.13)
Având în vedere faptul că mișcarea de intrare în mecanismul pentru suportul palmei, în cazul
acestei analize, este rotația φ52, rezultă ca unghiul este cunoscut. Atribuind diferite valori
unghiului , se pot determina poziţiile mecanismului BCEF.
Legătura dintre mecanismul BCEF și mecanismul ABCD este realizată de echilibrul forțelor
la nivelul bielei EF. În acest sens unghiurile , și devin:
(6.14)
Introducând relațiile 6.12 și 6.13 în relația 6.11 se obține:
(6.15)
Înlocuind în relaţia 6.15 relațiile 6.14 se obține o ecuație având ca necunoscută cos .
Rezolvarea ecuației s-a realizat cu ajutorul softului Matlab [GHI98]. În Anexa I se prezintă un set
de fişiere Matlab prin care se calculează unghiul folosind ca date de intrare diferite valori ale
unghiului , [FIL17b].

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
25
Verificarea acurateței datelor s-a realizat utilizând simularea mecanismului în Pro/Engineer.
S-au ales 16 valori ale unghiului care acoperă întreaga zonă de funcționare a mecanismului.
Valorile sunt prezentate în tabelul 6.1
Tabelul 6.1 Valorile unghiului obținute în Matlab şi ProE
1 2 3 4 5 6 7 8
70,6475 70,4015 69,6557 68,3085 66,175 63,0636 58,91 53,9399
Matlab
164,086 161,8852 155,8189 146,6856 135,2855 122,4188 108,8857 95,4856
ProE 164,0856 161,8856 155,819 146,6856 135,2856 122,419 108,8856 95,4856
9 10 11 12 13 14 15 16
48,7186 43,7669 39,3092 35,4258 32,0932 29,2327 26,7495 24,5503
Matlab
82,9968 71,6855 61,3075 51,5966 42,2856 33,1078 23,7965 14,0854
ProE
82,9967 71,6856 61,3078 51,5967 42,2856 33,1078 23,7967 14,0856
Având în vedere faptul că mecanismul prezentat mai sus asigură unghiurile funcționale ale
palmei și degetelor, se poate trece la modelarea echipamentului pentru reabilitarea palmei.
6.3. Modelarea echipamentului de reabilitare
În figura 6.17 se poate urmări poziția mâinii pe mecanism în cazul flexiei maxime a
pumnului, iar cazul extensiei maxime a pumnului este prezentat în figura 6.18.
Fig. 6.17 Flexia maximă a pumnului Fig. 6.18 Extensia maximă a pumnului
În figurile de mai sus se pot observa cele două patrulatere care formează mecanismul Fin Ray.
Primul mecanism patrulater este cel care asigură rotirea palmei. Rotirea în sens antiorar a arborelui
conduce la rotirea în sens antiorar a palmei, deci a ridicării acesteia. În acelaşi timp, al doilea
mecanism, cel care asigură deplasarea degetelor, se va roti în sens orar. În acest fel, rotirea în sens

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
26
antiorar a palmei va conduce la închiderea pumnului, iar rotirea în sens orar va conduce la
deschiderea acestuia.
Dispozitivele medicale produse în prezent sunt specializate fie pe rotația palmei, fie pe rotația
degetelor. Pornind de la cele prezentate mai sus se observă că acest dispozitiv aduce ca noutate
mișcarea simultană a palmei și a degetelor, asigurând mobilizarea simultană a mai multor grupe de
mușchi.
Fig. 6.19 Echipamentul pentru reabilitarea palmei
În figura de mai sus este prezentat echipamentul cu toate elementele sale componente.
Concluzii
Prezentarea efectului Fin Ray și a aplicațiilor acestuia permite înțelegerea modului de
funcționare al diferitelor mecanisme care au la bază acest fenomen. Plecând de la aplicațiile
cunoscute ale efectului Fin Ray a fost conceput un sistem de reabilitare a articulaţiilor mâinii care
roteşte palma și degetele pe zonele funcționale ale acestora.
Analiza noului sistem de reabilitare a constat, în primul rând, în modelarea matematică a
acestuia și în realizarea unui program care calculează pozițiile cuplelor mecanismului. Simularea în
Pro Engineer a confirmat modelul matematic.
Odată validat modelul matematic, s-a trecut la realizarea modelului tridimensional al
echipamentului folosit pentru reabilitarea palmei. Acest model tridimensional a permis analiza
cinematică și dinamică, precum și analiza la solicitări a echipamentului. În urma acestor studii, s-a
constatat faptul că echipamentul asigură deplasarea palmei și a degetelor pe zona funcțională a
acestora, iar rezultatul analizei la solicitări mecanice a scos în evidență faptul că echipamentul
asigură rezistența necesară în condițiile reale de funcţionare.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
27
PARTEA III. CERCETĂRI EXPERIMENTALE PRIVIND MODUL DE
LUCRU AL ECHIPAMENTULUI DE REABILITARE A
ARTICULAŢIILOR MÂINII, ACŢIONAT CU AJUTORUL
MUŞCHILOR PNEUMATICI
7. Standul experimental și modelul fizic al echipamentului destinat reabilitării
palmei
Plecând de la modelul tridimensional realizat în ProEngineer a fost realizat modelul fizic pe
care s-au efectuat cercetările experimentale prezentate în acest capitol.
7.1. Modelul fizic al echipamentului destinat reabilitării palmei
Ținând cont de rezultatele obținute în capitolele precedente, s-a putut trece la realizarea fizică
a echipamentului. Pentru construcția echipamentului s-a plecat de la următoarele premise:
- asigurarea protecției utilizatorului,
- echipamentul conceput trebuie să fie uşor, pentru a putea fi mutat fără dificultate,
- să fie rezistent,
- să fie realizat cu costuri minime.
În conformitate cu cele prezentate mai sus s-a optat pentru confecţionarea echipamentului din
profile de aluminiu, exceptând angrenajul roata dințată – cremalieră și placa suport a antebrațului,
care sunt realizate din material plastic.
În figura 7.1 este prezentat modelul fizic al echipamentului, realizat după conceptul
tridimensional al echipamentului modelat în ProEngineer.
Fig. 7.1 Structura mecanică a echipamentului
Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
28
Se poate observa faptul că în cazul în care presiunea în sistem este zero, echipamentul se
găsește în poziție de flexie maximă. Deoarece poziția palmei bolnavului este diferită de flexia
maximă, în momentul în care bolnavul dorește să utilizeze echipamentul, suportul palmei trebuie
poziționat astfel încât acesta să sprijine palma bolnavă. Pentru aceasta, mușchiul se va alimenta cu
aer sub presiune, mecanismul pentru suportul palmei ridicându-se până când acesta ajunge în
contact cu palma.
Deoarece echipamentul nu este solicitat de forțe mari, dimensiunile de gabarit au fost alese
având în vedere dimensiunile palmei și ale antebraţului unui adult. În acest sens, lățimea
mecanismului pentru suportul palmei este de 145 mm. Înălțimea echipamentului este dată de flexia
maximă a palmei. În această poziție vârful degetelor nu trebuie să atingă baza echipamentului,
distanța între suportul antebrațului și baza echipamentului fiind de 185 mm. Lungimea
echipamentului trebuie să asigure o bază stabilă pentru antebraț. Din acest motiv s-a ales ca suportul
antebrațului să aibă lungimea de 380 mm.
Masa echipamentului, având muşchiul pneumatic montat pe el, este de 2,6 kg.
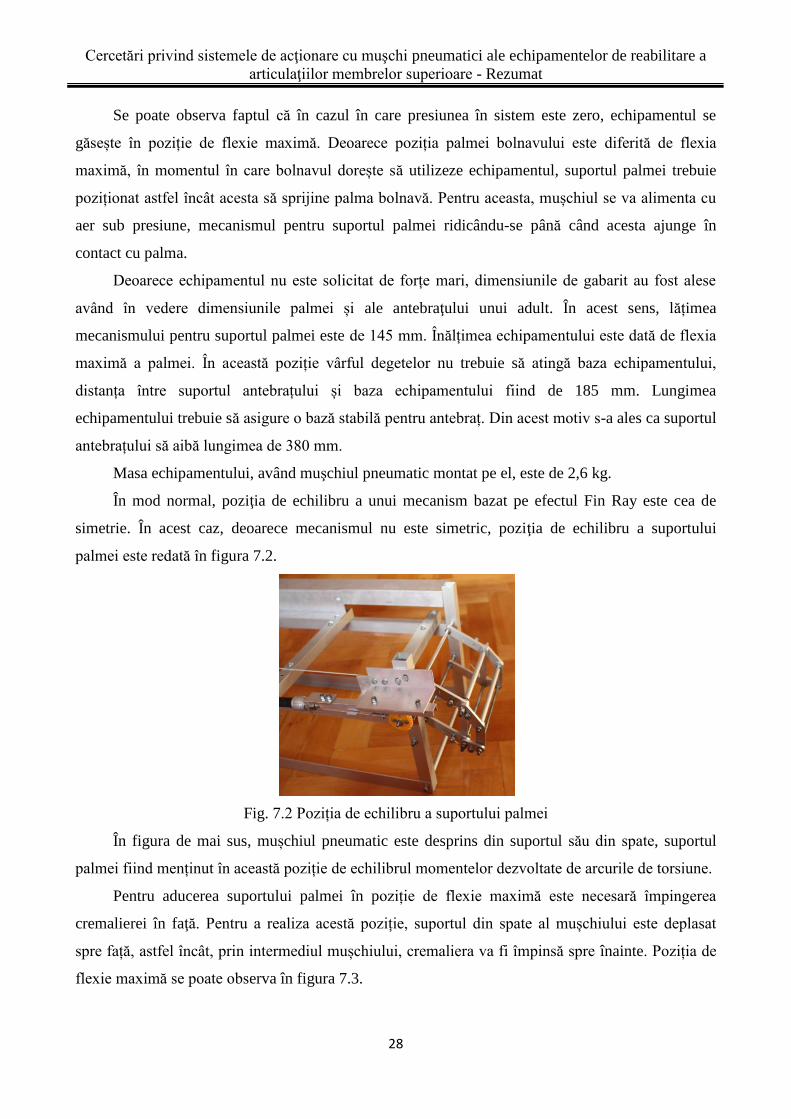
În mod normal, poziţia de echilibru a unui mecanism bazat pe efectul Fin Ray este cea de
simetrie. În acest caz, deoarece mecanismul nu este simetric, poziţia de echilibru a suportului
palmei este redată în figura 7.2.
Fig. 7.2 Poziția de echilibru a suportului palmei
În figura de mai sus, mușchiul pneumatic este desprins din suportul său din spate, suportul
palmei fiind menținut în această poziție de echilibrul momentelor dezvoltate de arcurile de torsiune.
Pentru aducerea suportului palmei în poziție de flexie maximă este necesară împingerea
cremalierei în faţă. Pentru a realiza acestă poziție, suportul din spate al mușchiului este deplasat
spre față, astfel încât, prin intermediul mușchiului, cremaliera va fi împinsă spre înainte. Poziția de
flexie maximă se poate observa în figura 7.3.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
29
Fig. 7.3 Poziția de flexie maximă
În vederea transformării mișcării de translație în mișcare de rotație se folosește un mecanism
pinion-cremalieră. În figura 7.4 se observă mecanismul pinion-cremalieră și modul de funcționare al
acestuia în cadrul echipamentului destinat reabilitării palmei. Suportul în care este fixată cremaliera
este acționat în mod direct de mușchiul pneumatic. Un profilul U ghidează suportul cremalierei în
traiectoria sa liniară pentru a asigura contactul dintre cremalieră și pinion. Componentele din figura
7.4 permit mici ajustări pentru asigurarea unei deplasări ușoare a mecanismului pinion-cremalieră.
Fig. 7.4 Mecanismul pinion cremalieră.
În figura 7.5 este prezentat cazul extensiei maxime obţinute de echipamentul de reabilitare a
articulaţiilor mâinii, în comparație cu poziția similară obținută în simularea din ProEngineer. Se
observă faptul că simularea din ProEngineer aproximează cu fidelitate modelul fizic, diferenţele
fiind date de caracteristicile arcurilor torsionale. În cazul real, constanta elastică a arcului diferă
uşor de la un arc la altul, poziționarea brațelor arcului putând introduce astfel abateri față de
modelul teoretic.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
30
Fig. 7.5 Poziția de extensie maximă
7.2. Acționarea pneumatică a echipamentului
În vederea realizării cercetărilor experimentale s-a conceput schema pneumatică de acționare
prezentată în figura 7.6:
Fig. 7.6 Schema pneumatică de acționare a echipamentului
Conform schemei, principalele componente sunt următoarele:
- compresorul de aer - acesta asigură aerul comprimat necesar instalației pneumatice;
- grupul de pregătire a aerului comprimat - are rolul de a filtra și usca aerul, precum și de a
asigura o anumită valoare a presiunii în instalația pneumatică;
- un distribuitor pneumatic tip 3/2 - cu rol de oprire rapidă a instalației pneumatice;

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
31
- un regulator proporțional de presiune - controlează continuu presiunea aerului care
acționează mușchiul pneumatic;
- un senzor de debit - cu ajutorul acestuia se măsoară debitul de aer care ajunge în
mușchiul pneumatic;
- un senzor de presiune care măsoară presiunea aerului din interiorul mușchiului
pneumatic.
Pentru realizarea schemei pneumatice s-au folosit simboluri standardizate, prezentate în
lucrarea [CRO02].
Funcționarea instalației pneumatice se realizează astfel: aerul atmosferic este absorbit de un
compresor, care comprimă și stochează aerul într-un rezervor. Din rezervor, aerul este trecut prin
grupul de pregătire, care-l filtrează, elimină apa din acesta și, prin intermediul regulatorului de
presiune, prevăzut și cu un manometru, stabilizează presiunea aerului la o valoare cerută de sistem
(valoarea maximă de 6 bar). Pentru a ajunge la mușchiul pneumatic, aerul este trecut apoi printr-un
distibuitor normal deschis cu poziţie reținută, care are rol de a descărca presiunea din instalația
pneumatică în atmosferă în caz de defecțiune a instalației pneumatice. Urmează apoi regulatorul
proporțional de presiune prin intermediul căruia se comandă mişcările muşchiului pneumatic. Între
regulatorul proporțional și mușchiul pneumatic se mai introduc doi senzori. Un senzor este pentru
măsurarea debitului de aer utilizat de mușchi și altul este pentru măsurarea presiunii aerului din
interiorul mușchiului. Datele furnizate de senzori pot fi stocate și prelucrate prin intermediul unei
plăci de achiziții de date și a unui computer, utilizând un program de calculator dedicat (FluidLab).
Amplasarea componentelor pneumatice pe echipament este arătată în figura 7.7:
Fig. 7.7 Poziţionarea pe echipamentul de reabilitare a componentelor electrice şi pneumatice
Alimentarea cu aer a muşchiului pneumatic se face la capătul fix al acestuia, de celălalt capăt
al său fixându-se cremaliera (figura 7.8).

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
32
Fig. 7.8 Cuplarea pneumatică a mușchiului
7.3. Determinări experimentale
7.3.1. Determinarea curbei presiune-forță a mușchiului folosit în construcția
echipamentului de reabilitare
Pentru ridicarea curbei de dependenţă a forţei dezvoltate de muşchiul pneumatic în funcţie de
presiunea de alimentare se va folosi aceeași schemă pneumatică prezentată în figura 7.6. Obţinerea
acestei dependenţe se face cu muşchiul pneumatic izolat, extras din echipamentul de reabilitare. În
figura 7.9 este prezentată masa standului experimental pe care s-au făcut aceste determinări. Pe
aceasta sunt fixate aparatele pneumatice inclusiv mușchiul pneumatic care urmează să fie testat.
Muşchiul pneumatic are capătul liber legat la un traductor de forţă.
Fig. 7.9 Vedere de sus a standului experimental
Figura 7.10 prezină o vedere de ansamblu a standului experimental în care este cuprinsă
aparatura pneumatică, partea electrică și cea electronică. Legătura dintre senzori și computer se
realizează cu ajutorul unei interfețe analog digitale (Easy Port), prezentată și ea în figura 7.10.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
33
Fig. 7.10 Vedere din față a standului
Presiunea din mușchiul pneumatic este gestionată de regulatorul proporțional de presiune.
Comanda regulatorului proporțional de presiune se realizează prin intermediul unui modul de
referință MPZ-1-24DC-SGH-6-SW. Modulul este proiectat să asigure maximum 6 valori diferite ale
tensiunii de referință, valori reglabile prin intermediul unor potențiometre rotative. Ieșirea din
modul asigură o tensiune constantă, în funcție de tensiunea de referință, comanda fiind realizată prin
intermediul unui controller digital. În cazul în care nu se primește semnal de la tensiunile de
referință, reglarea tensiunii de ieșire se realizează de la un potențiometru extern, care este cuplat la
acest modul de referință.
În figura 7.11 este prezentată schema electrică de comandă a regulatorului proporțional de
presiune. Deoarece se urmărește obţinerea unei variații continue a presiunii, comanda modulului de
referință se realizează cu un potențiometru rotativ extern de 10 kΩ. În acest fel, tensiunea de
comandă a regulatorului proporțional de presiune variază de la 0 la 10V, obținând o variație a
presiunii de la 0 la 6 bari.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
34
Fig. 7.11 Schema electrică de comandă a regulatorului proporţional de presiune
Transmiterea informațiilor de la senzori la computer se poate observa în figura 7.12.
Fig. 7.12 Fluxul informațiilor de la senzori la computer

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
35
Salvarea datelor se realizează cu ajutorul softului FluidLab®-P V1.0. Acest soft, realizat de
Festo Ag & Co, este specializat pe colectarea și prelucrarea datelor furnizate de sistemele
pneumatice. În acest caz se vor stoca datele referitoare la presiune și tensiunea furnizată de senzorul
de forță.
Reprezentatea grafică a interfeței FluidLab este prezentată în figura 7.13. Meniul principal
este prezentat sub forma unei bare verticale de instrumente.
Fig. 7.13 Interfața FluidLab
Pornind de sus în jos se va realiza o scurtă descriere a butoanelor care compun bara de
instrumente:
- primul buton comandă închiderea programului;
- următoarele trei butoane deschid trei subprograme destinate
înregistrării datelor în cazul experimentelor de bază, a comutării cilindrilor sau a
echipamentelor care folosesc aparatură proporțională;
- butonul cinci realizează configurarea programului;
- ultimul buton furnizează informaţii despre soft şi despre modificări.
În urma rulării subprogramelor, datele colectate pot fi vizualizate sub forma unor grafice, care
se pot salva ca fișiere .jpg, sau sub forma unor fişiere text, cu extensia .txt.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
36
Ridicarea curbei de dependenţă a forţei dezvoltate de muşchiul pneumatic în funcţie de
presiunea de alimentare presupune parcurgerea unor etape intermediare. O prima etapă constă în
etalonarea senzorului de forță.
În lucrarea [PET12] s-a determinat funcția de etalonare a traductorului:
(7.1)
În urma stabilirii funcției de etalonare s-a trasat graficul din figura 7.14.
Fig. 7.14 Dreapta de etalonare a traductorului de forță [PET12]
A doua etapă constă în ridicarea caracteristicii presiune - tensiune de ieșire a senzorului de
forță. Prin varierea continuă a presiunii se modifică forța cu care mușchiul pneumatic acționează
asuprea senzorului de forță. Variația forței este determinată prin intermediul tensiunii de ieșire a
senzorului de forță. Cu ajutorul softului FluidLab s-au înregistrat presiunea din sistem și tensiunea
de ieșire a senzorului de forță. Rezultatele sunt prezentate în graficul din figura 7.15.
Din grafic se observă faptul că deși presiunea din sistem crește, senzorul de forță emite
semnal doar după aproximativ 0,5 s. Acest fenomen se explică prin faptul că, iniţial, o parte din
energia pneumatică este consumată pentru deformarea tubului elastic și învingerea forțelor de
frecare care apar între tubul elasic al muşchiului și fibrele de ţesătură încorporate în acesta.
Fig. 7.15 Graficul evoluţiei în timp a presiunii și tensiunii

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
37
Pentru determinarea corespondenței dintre tensiunea de ieșire și forță, din fișierul text (vezi
date.txt din Anexa 2) în care se găsesc valorile după care s-a construit graficul de mai sus se rețin
liniile în care valoarea presiunii este cea mai apropiată de 0, 1, 2, 3, 4, 5 și, respectiv, 6 bari.
Valorile reținute sunt prezentate în tabelul 7.3.
Tabelul 7.3 Variaţia presiunii și a tensiunii de ieșire a traductorului în timp
Timp[s] 0,103 2,938 4,178 5,636 7,051 7,967 9,609
Presiune[bar] 0,098 1,006 2,012 2,998 4,014 5,000 5,898
Tensiune[V] 0,000 0,098 0,664 1,182 1,533 1,885 2,227
Din relația 7.1 se determină funcția care descrie variația forței F în funcție de tensiunea U.
(7.2)
Întroducând în relaţia (7.2) valorile tensiunilor din tabelul 7.3 se determină corespondența
dintre tensiunea de ieșire a senzorului de forță și forța care acționează asupra senzorului. În tabelul
7.4 se poate observa această dependență.
Tabelul 7.4 Variația tensiunii de ieșire a traductorului și a forței mușchiului în timp
Timp[s] 2,597 2,938 4,178 5,636 7,051 7,967 9,609
Tensiune[V] 0,000 0,098 0,664 1,182 1,533 1,885 2,227
Forța[N] 0,000 10,301 68,963 120,983 156,909 192,938 232,344
Timp[s] 12,696 13,776 14,800 16,301 17,777 18,479
Tensiune[V] 2,031 1,650 1,260 0,859 0,303 0,000
Forța[N] 207,881 168,884 128,966 87,922 31,013 0,000
Combinând tabelele 7.3 și 7.4 se obține graficul forţei dezvoltate de muşchiul pneumatic în
funcţie de presiunea de alimentare:
Timp[s] 12,696 13,776 14,800 16,301 17,777 21,263
Presiune[bar] 5,020 4,004 3,008 1,992 0,986 0,098
Tensiune[V] 2,031 1,650 1,260 0,859 0,303 0,000

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
38
Fig. 7.16 Caracteristica forță - presiune a mușchiului pneumatic
Din graficul de mai sus se poate observa comportamentul mușchiului pneumatic în timpul
funcționării. Curba de comprimare este diferită de cea de destindere. În cazul comprimării, forțele
dezvoltate de mușchiul pneumatic sunt mai mici decât cele obţinute în cazul destinderii. Pentru
comprimarea mușchiului presiunea creşte de la 0 la 6 bari, curba comprimării fiind partea din curbă
mai apropiată de abscisă. Destinderea mușchiului pneumatic se realizează pe partea superioară a
curbei, presiunea scăzând de la 6 la 0 bari. Zona cuprinsă în interiorul curbei este zona histerezisului
mușchiului pneumatic și este specifică tuturor sistemelor elastice.
7.3.2. Cercetări experimentale efectuate asupra echipamentului pentru reabilitarea
palmei
7.3.2.1. Determinarea unghiurilor de extensie maximă și de flexie maximă realizate de
echipamentul de reabilitare
Măsurătorile efectuate au vizat determinarea unghiurilor de extensie și de flexie maximă pe
care palma, deplasată de suportul AB, le face în raport cu antebrațul. Dreapta orizontală care trece
prin punctul A se consideră bază în măsurarea unghiului . Unghiurile negative sunt considerate
unghiurile pentru care suportul AB se găsește sub axa orizontală, pentru valorile pozitive suportul
AB fiind poziționat desupra dreptei orizontale. În figura 7.17 se prezintă o schiță a unghiului care
urmează a fi măsurat.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
39
Fig. 7.17 Extensia și flexia palmei
Conform lucrării [FIL17c], pentru determinarea deplasării unghiulare a suportului AB se
modifică în mod continuu presiunea din sistem. În cazul experimentului desfăşurat, presiunea creşte
de la 0 la 6 bari, apoi se reduce presiunea în mod continuu de la 6 bari la 0. Rotația suportului AB
s-a măsurat cu ajutorul unui raportor digital. În figura 7.18 se prezintă una dintre măsurătorile
făcute pentru determinarea mărimii unghiului pe care palma îl face în raport cu antebrațul. În
vederea realizării unei măsurători corecte, brațele raportorului s-au așezat pe o suprafaţă plană, unul
în prelungirea celuilalt, în această poziție realizându-se setarea la zero (figura 7.19).
Fig. 7.18 Măsurarea unghiului antebraț - palmă

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
40
a b
Fig. 7.19 Afişajul raportorului digital: a – reglat la zero, b – unghi oarecare
Valorile măsurate sunt prezentate în tabelul 7.5.
Tabelul 7.5 – Rotire suport AB
Presiune [Bar] 0 1 2 3 4 5 6
Unghi [°] -76.2 -64.7 -49.8 -25.0 7.1 35.0 61.8
Cu valorile din tabelul 7.5 se obține diagrama din figura 7.20. Rezultatele experimentale
obţinute au scos în evidenţă apariţia unor abateri ale mărimii unghiurilor limită în raport cu cele
obţinute pe cale teoretică. Astfel, în cazul flexiei maxime, abaterea este de aproximativ 4° la
începutul contracției mușchiului și ajunge la 13°, la finalul contracției, din cauza histerezisului
mușchiului. În cazul extensiei maxime abaterea este de aproximativ 8°.
Fig. 7.20 Dependenţa unghi - presiune
Presiune [Bar] 6 5 4 3 2 1 0
Unghi [°] 61.8 57.2 45.7 21.3 -18 -49 -67

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
41
O evaluare indirectă a unghiului de rotire a suportului palmei AB se poate realiza şi prin
măsurarea deplasării cremalierei. Presupunând că pinionul și cremaliera angrenează pe cercul de
divizare, putem concluziona că deplasarea liniară a cremalierei se transpune integral pe un arc de
cerc al cercului de divizare. Cunoscând lungimea arcului de cerc se poate determina unghiul la
centru corespunzător acestui arc. Acest unghi ar trebui să corespundă rotației suportului AB.
Pentru măsurători se pleacă de la poziția de flexie maximă pe care o realizează echipamentul,
valoarea unghiului pentru suportul AB fiind de -76,2°. Acestă poziție se consideră poziția de zero
pentru cremalieră. În tabelul 7.6 se prezintă rezultatele măsurătorilor.
Tabelul 7.6 – Deplasarea cremalierei
Presiune [Bar] 0 1 2 3 4 5 6
Cremaliera
[mm] 0 3.2 7.5 14.8 23.1 31.4 37.3
Presiune [Bar] 6 5 4 3 2 1 0
Cremaliera
[mm] 37.3 36.1 33.8 26.1 15.9 7.6 2.1
Dependenţa deplasare cremalieră – presiune este prezentată în figura 7.21.
Fig. 7.21 Dependenţa deplasare cremalieră - presiune
Cu ajutorul formulei 7.3 se poate determina poziţia unghiulară a suportului AB în funcție de
deplasarea cremalierei.
(7.3)
unde: α° - unghiul la centru măsurat în grade, Larc – lungimea arcului de cerc, rd – raza cercului de
divizare.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
42
Având în vedere că în poziția inițială suportul AB se găsește la -76,2° față de orizontală, se
poate figura dependenţa unghi - presiune, determinată de deplasarea cremalierei.
Fig. 7.22 Dependenţa unghi – presiune
Suprapunând curbele unghi - presiune, una determinată prin măsurarea directă a unghiului,
cealaltă determinată indirect, prin măsurarea deplasării cremalierei, se poate observa influența
abaterilor de montaj asupra deplasării unghiulare a suportului AB (figura 7.23).
Fig. 7.23 Curbele unghi - presiune măsurate direct și indirect
Abaterile maxime apar în zona extensiei maxime. În cazul măsurării directe valoarea maximă
a unghiului este cu aproximativ 4° mai mică decât în cazul măsurării indirecte. Această diferență
apare deoarece măsurarea indirectă este influențată de erorile de construcție şi de montaj.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
43
Având în vedere cele prezentate mai sus, pentru reglarea echipamentului se va folosi
diagrama din figura 7.20. De exemplu, dacă urmărim să poziționăm echipamentul în poziția de 0°,
trebuie crescută presiunea la 3,8 bari. Această valoare se obține din intersecția curbei de contracție
a mușchiului cu axa orizontală (0°). Pentru un punct de pe curba de contracție a mușchiului se va
găsi o singură valoare corespondentă atât pentru unghi cât și pentru presiune. În acest fel, pentru
orice unghi al suportului AB cuprins în zona activă a echipamentului se determină o valoare unică a
presiunii. În acest mod se pot realiza diferite programe de deplasare ale suportului AB.
7.3.2.2. Determinarea unghiului palmă – degete realizat de echipamentul de reabilitare
Determinarea unghiului palmă – degete presupune măsurarea unghiului , unghi prezentat
în figura 7.24. Conform lucrării [SBE87] extensia degetelor variază între 0° și 90° în funcție de
individ. Se deduce astfel că o palmă este funcțională dacă extensia acesteia are cel puţin valoarea 0.
Fig. 7.24 Flexia și extensia degetelor
Măsurarea acestui unghi presupune creşterea continuă a presiunii de la 0 la 6 bari şi apoi
scăderea acesteia până la 0 bar. Pe echipamentul de reabilitare s-au citit valorile unghiului atunci
când presiunea a variat din bar în bar în sens crescător și apoi descrescător. Valorile s-au măsurat cu
un raportor digital conform figurii 7.25.
În urma măsurătorilor efectuate s-au obținut valorile din tabelul 7.7:
Tabelul 7.7 Rotirea suportului pentru degete BE
Presiune [Bar] 0 1 2 3 4 5 6
Unghi [°] 4.7 13.7 26.6 39.4 50.9 68 79.5
Presiune [Bar] 6 5 4 3 2 1 0
Unghi [°] 79.5 78.5 68.2 47.9 28.9 16 5.9

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
44
Fig. 7.25 Măsurarea unghiului de flexie a degetelor
Cu ajutorul valorilor din tabelul 7.7 se trasează graficul din figura 7.26.
Fig. 7.26 Dependenţa unghi - presiune
Deoarece poziția suportului palmei AB nu atinge valorile de extrem obținute pe cale teoretică,
pozițiile limită ale suportului degetelor BE nu sunt nici ele atinse. Mecanismul pentru suportul
palmei a fost proiectat astfel încât, la rotirea maximă a palmei, să se atingă valoarea maximă a
rotirii degetelor. În acest caz, deoarece suportul palmei nu atinge valoarea maximă teoretică, nici
suportul degetelor nu va atinge această valoare. Din figura de mai sus se mai observă și un fenomen
de histerezis care apare din cauza arcurilor torsionale care acționează mecanismul BEFC.
Concluzii
Având în vedere rezultatele obținute în urma măsurătorilor, se poate deduce faptul că
echipamentul poate fi folosit pentru scopul propus, adică se poate utiliza pentru reabilitarea

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
45
articulaţiilor mâinii şi a degetelor. Echipamentul realizează deplasarea palmei și a degetelor pe zona
funcțională a acestora, având probleme doar pe zona mobilității maxime.
Abaterile pe care le are echipamentul față de pozițiile teoretice pot fi explicate prin erorile
apărute la montaj și prin constantele elastice diferite ale arcurilor de torsiune.
Un prim experiment a constat în ridicarea caracteristicii forță – presiune a mușchiului utilizat.
Se observă că această curbă prezintă un histerezis, specific mușchiului pneumatic.
Utilizarea mușchiului pneumatic în construcția echipamentului pentru reabilitarea palmei va
imprima echipamentului mișcări diferite în faza de ridicare și de coborâre a palmei. Curba de
deplasare a palmei va prezenta un histerezis asemănător cu cel al mușchiului pneumatic. Acest
dezavantaj se transformă în avantaj la capăt de cursă, schimbarea sensului de mișcare realizându-se
fără șocuri. Se evidențiază în acest mod caracterul compliant al mușchiului pneumatic.
În mod identic și deplasarea degetelor prezintă histerezis. În acest caz histerezisul este
influențat atât de mușchiul pneumatic, cât și de cele două arcuri care acționează mecanismul pentru
deplasarea degetelor.
Experimental s-au trasat și curbele:
presiune – unghi, curbă asociată rotirii articulației pumnului,
presiune – deplasare cremalieră, din care se poate calcula rotația articulației pumnului,
presune – unghi, curbă asociată rotirii articulațiilor degetelor.
Determinarea poziției palmei se poate determina în două moduri:
indirect – prin determinarea pozitiei cremalierei și calculul rotirii suportului palmei
direct – prin deterrminarea rotirii suportului palmei
Metoda indirectă este mai imprecisă decât metoda directă, deoarece nu ţine cont de erorile de
construcție ale echipamentului.
Pentru realizarea comenzii automate a echipamentului se recomandă instalarea unui senzor de
rotație pe arborele echipamentului.
În urma experimentelor realizate s-a constatat că muşchiul pneumatic asigură forța necesară
antrenării echipamentului de reabilitare.
Sistemul de comandă conceput permite reglarea vitezei de funcționare a echipamentului într-
un domeniu acoperitor cerinţelor exerciţiului de reabilitare.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
46
8. Concluzii şi contribuţii originale
Ca urmare a cercetărilor efectuate pentru întocmirea tezei de doctorat, în continuare se
prezintă concluziile desprinse din rezultatele obţinute, precum și contribuțiile personale.
8.1. Concluzii generale
Obiectivul principal al acestei teze de doctorat a fost acela de realizare a unui echipament
pentru recuperarea articulațiilor mâinii, a cărui acționare să fie obţinută cu ajutorul unui mușchi
pneumatic. În acest sens, s-a conceput un echipament de reabilitare care îndeplinește obiectivul
propus, echipament care poate fi folosit pentru recuperarea mobilității articulațiilor mâinii, utilizând
mișcarea pasivă continuă.
Noutatea echipamentului este dată de sistemul de acționare utilizat (mușchi pneumatic) și de
noul mecanism propus, bazat pe efectul Fin Ray. În acest caz, principalul avantaj al acționării cu un
mușchi pneumatici este acela al complianţei. Complianţa, inversa rigidităţii, este acea proprietate a
unui motor care permite deviaţii de la o anumită poziţie de echilibru în cazul în care asupra
sistemului acţionat se exercită forţe exterioare. Motoarele cu complianţă ajustabilă (muşchii
pneumatici) prezintă anumite avantaje, cum ar fi capacitatea de minimizare a efectelor şocurilor
mecanice, siguranţa oferită la interacţiunea cu omul sau abilitatea de a înmagazina şi elibera energie
în elemente elastice de tip pasiv. Utilizarea muşchilor pneumatici asigură adaptabilitatea sistemelor
acţionate la situaţia concretă de lucru, în unele cazuri diferită de cea planificată iniţial.
Structura teza de doctorat este realizată în trei părți.
În prima parte sunt prezentate noțiuni de biomecanică şi kinetoterapie necesare înțelegerii
funcționării articulațiilor membrului superior. Este realizată apoi o analiză a stadiului actual al
echipamentelor de reabilitare a articulațiilor membrelor superioare, fiind studiate atât cele care se
comercializează în prezent, cât și echipamentele aflate în stadiul de brevet.
Partea a doua a tezei a rezultat în urma analizei efecuate asupra echipamentelor de reabilitare
prezentate anterior. În acestă parte se propune obţinerea unui nou echipament pentru reabilitarea
articulațiilor mâinii care să mobilizeze simultan atât articulația palmei cât și articulațiile degetelor,
acționarea fiind realizată cu un mușchi pneumatic liniar. Pe modelul CAD s-a realizat simularea
mecanismului pe care se sprijină palma, acest model fiind folosit și pentru analizele cinematice și
dinamice. Analiza cinematică a fost confirmată de programul realizat în Matlab. În urma simulării
funcționării mecanismului s-a putut observa faptul că acesta asigură caracteristicile de mişcare
impuse echipamentului de reabilitare.
Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
47
În cea de-a treia parte a tezei, pornind de la structura CAD, s-a realizat structura mecanică a
echipamentului, s-a conceput și realizat instalația pneumatică și standul destinat testelor
experimentale. Experimentele efectuate au validat soluția propusă, echipamentul de reabilitare
îndeplinind cerințele pentru care a fost conceput.
Din studiile efectuate pentru elaborarea tezei se desprind următoarele concluzii:
1. În prima parte a tezei de doctorat s-a urmărit prezentarea echipamentelor de reabilitare a
articulațiilor membrului superior şi a noțiunilor generale de kinetoterapie, cu accent pe mobilitatea
articulațiilor membrului superior. În urma consultării bibliografiei, a lucrărilor recent apărute în
domeniul tezei, s-au putut evidenția mai multe domenii de studiu:
kinetoterapia și recuperare medicală,
metodele de recuperare utilizate în kinetoterapie,
reabilitarea membrului superior, bilanț articular,
necesitatea utilizării echipamentelor de reabilitare,
stadiul actual al echipamentelor destinate reabilitării articulațiilor membrului
superior.
Analizând critic echipamentele de reabilitare care se comercializează în prezent, se poate
reține faptul că majoritatea celor destinate reabilitării membrului superior folosesc pentru acționare
motoare electrice. Conform bibliografiei studiate, cercetările se îndreaptă, în acest moment, şi spre
echipamentele acționate pneumatic.
Utilizarea mușchilor pneumatici liniari în acționarea echipamentelor de reabilitare presupune
cunoașterea mai multor aspecte legate de aceștia:
tipurile constructive de mușchi,
caracteristicile acestor mușchi și în ce domenii pot fi utilizați,
exemple de aplicații tehnice care folosesc mușchi pneumatici liniari.
În urma cercetării realizate s-a propus ca noul echipament de reabilitare să fie acționat cu
ajutorul muşchilor pneumatici liniari produși de compania Festo.
2. Partea a doua a tezei se axează pe studiile teoretice care s-au efectuat asupra echipamentului
de reabilitare a articulațiilor mâinii, acționat cu ajutorul mușchilor pneumatici liniari.
Structura mecanică destinată sprijinirii și mobilizării palmei se bazează pe efectul Fin Ray,
acest lucru aducând un element de originalitate cercetării.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
48
Într-o primă etapă s-a realizat modelarea virtuală a mecanismului utilizând softul
ProEngineer. Prin simulări repetate s-au stabilit dimensiunile finale ale mecanismului. Pe modelul
final s-au realizat analizele cinematice și dinamice.
Pe structura finală s-a refăcut analiza cinematică și, cu ajutorul softului Matlab, s-au calculat
pozițiile intermediare şi finale ale mecanismului. S-a constatat că diferențele între cele două analize
sunt minore.
Cu ajutorul softului Adams s-a determinat forța maximă necesară acționării echipamentului.
Acestă forță a fost utilizată în analiza cu element finit a echipamentului. În urma acestei analize s-au
determinat și vizualizat tensiunile maxime care apar în componentele echipamentului și
deformațiile suferite de acestea.
3. Ultima parte a tezei a constat în realizarea fizică a echipamentului destinat reabilitării
articulațiilor mâinii, a standului pentru testări și realizarea cercetărilor experimentale privind modul
de lucru al acestui echipament.
Cercetările experimentale au condus la următoarele concluzii:
echipamentul poate fi folosit pentru reabilitarea mâinii,
în urma experimentelor realizate s-a constatat faptul că echipamentul de reabilitare
prezintă abateri minore față de pozițiile extreme teoretice. Aceste abateri pot fi
explicate prin erorile apărute la montaj și constantele elastice diferite ale arcurilor de
torsiune folosite.
curba deplasării palmei se aseamănă cu cea a mușchiului, prezentând un histerezis
asemănător muşchiului pneumatic,
curba deplasării degetelor prezintă și ea histerezis. Această curbă este influențată atât
de histerezisul mușchiului pneumatic, cât și de histerezisul arcurilor torsionale.
muşchiul pneumatic asigură forța necesară antrenării echipamentului de reabilitare,
echipamentul permite reglarea vitezei de funcționare a echipamentului.
Un avantaj al folosirii acţionării pneumatice este cel economic. Utilizarea acționării cu un
muşchi pneumatic liniar reduce prețul de cost al echipamentului, comparativ cu acţionările clasice
cu motoare electrice.
Având în vedere cele prezentate mai sus, se poate concluziona că echipamentul de reabilitare
propus îndeplinește scopul și cerințele impuse în tema de cercetare.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
49
8.2. Contribuţii personale
Teza de doctorat eviențiază în conținutul ei două idei originale:
1. construcţia mecanismului suport pentru palmă, structura sa bazându-se pe efectul Fin
Ray,
2. utilizarea unui nou tip de acționare a echipamentului, muşchiul pneumatic liniar
înlocuind motorul electric.
În continuare sunt prezentate contribuțiile personale rezultate în urma elaborării tezei de
doctorat:
1. studiul asupra articulațiilor membrului superior, din punct de vedere al kinetologiei
2. sinteza stadiului actual al echipamentelor destinate reabilitării articulațiilor membrelor
superioare
3. utilizarea unui nou sistem de acționare al echipamentului de reabilitare, cel cu un
mușchi pneumatic liniar
4. în vederea alegerii celei mai bune variante de mușchi pneumatic liniar s-a realizat un
studiu asupra diferitelor tipuri de mușchi pneumatici
5. conceperea unui nou mecanism pentru susţinerea și deplasarea palmei
6. modelarea virtuală a noului mecanism utilizând softul ProEngineer
7. simularea funcționării şi analiza cinematică și dinamică a mecanismului utilizând
softul ProEngineer
8. realizarea unei noi analizei cinematice
9. pe baza analizei cinematice s-a realizat un program scris în Matlab cu ajutorul căruia
s-au determinat pozițiile mecanismului. Comparând valorile pozițiilor mecanismului
obținute prin cele două metode s-a constatat faptul că diferențele obţinute sunt
nesemnificative
10. determinarea forței necesare acționării echipamentului cu ajutorul softului Adams
11. analiza cu element finit a componentelor mecanismului
12. realizarea fizică a structurii mecanice a echipamentului
13. conceperea și realizarea instalației pneumatice necesară acționării echipamentului
14. conceperea și executarea standului experimental
15. trasarea caracteristicii forță – presiune a mușchiului pneumatic liniar
16. determinarea experimentală a graficului rotirii articulației palmei prin metoda directă
17. determinarea experimentală a graficului rotirii articulației palmei prin metoda indirectă
18. determinarea experimentală a graficului rotirii articulațiilor degetelor

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
50
19. concluzii referitoare la experimentele realizate
8.3. Dezvoltări viitoare
Având în vedere faptul că cercetările realizate în țara noastră în domeniul echipamentelor de
reabilitare sunt destul de sărace în informații, prezenta lucrare poate fi un punct de plecare pentru
dezvoltări viitoare. În acest sens se pot sugera câteva direcții noi de studiu a acestui echipament:
studierea și eliminarea abaterilor care apar în zona pozițiilor extreme ale
mecanismului,
studierea influenței arcurilor torsionale asupra pozițiilor extreme ale deplasării
degetelor,
conceperea unei noi structuri de comandă a echipamentului,
realizarea unui echipament portabil de reabilitare pornind de la modelul fix existent,
exploatarea echipamentului într-un centru de reabilitare în vederea determinării
punctelor slabe și realizarea unor îmbunătățiri ulterioare
8.4. Valorificarea tezei
Pe parcursul elaborării tezei de doctorat au fost susţinute şi publicate 5 lucrări științifice la
conferințe naționale și internaționale, în calitate de prim autor, două dintre ele fiind indexate ISI
Web of Knowledge.

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
51
Bibliografie selectivă
[AND15] ANDRIKOPOULOS, G., et al., Motion Control of a Novel Robotic Wrist
Exoskeleton via Pneumatic Muscle Actuators, In Emerging Technologies & Factory
Automation (ETFA), 2015 IEEE 20th Conference on, pp. 1-8. IEEE, 2015.
[AUB14] AUBIN, P., et al., A pediatric robotic thumb exoskeleton for at-home rehabilitation,
International Journal of Intelligent Computing and Cybernetics, Vol. 7, no. 3, pp.
233 – 252, 2014
[DAE99] DAERDEN, F., "Conception and realization of Pleated Pneumatic Artificial Muscles
and their use as compliant actuation elements", PHD Thesis, Vrije Universiteit
Brussel, 1999
[DEA07] DEACONESCU, T. Studies regarding the performance of pneumatic muscles,
International Conference on Economic Engineering and Manufacturing Systems,
Brașov, 25 – 26 October 2007
[DEA16] DEACONESCU, T., DEACONESCU, A. Applications of Pneumatic Muscles
Developed within the Festo National Fluid Actuation and Automation Training
Centre in Brasov. RECENT, Vol. 17, no. 4, pp. 540-547, 2016
[ERI16] ERIN, O., et al. Design of a bio-inspired pneumatic artificial muscle with self-
contained sensing. in Engineering in Medicine and Biology Society (EMBC), 2016
IEEE 38th Annual International Conference of the, pp. 2115-2119. IEEE, 2016.
[FEL16] FELT, W., et al. Contraction Sensing With Smart Braid McKibben Muscles,
IEEE/ASME Transactions on Mechatronics, Vol. 21, no. 3, pp. 1201-1209, 2016
[FIG14] FIGLIOLINI, G., REA, P. Mechatronic design and experimental validation of a novel
robotic hand. Industrial Robot: An International Journal, vol. 41, no. 1, pp. 98-108,
2014
[FIL13a] FILIP, O., DEACONESCU, T. Cutting-Edge Actuating Systems of the Upper Limb
Rehabilitation Devices, Advances in Production, Automation and Transportation
System, Proceedings of the 6th
International Conference on Manufacturing
Engineering, Quality and Production Systems (MEQAPS ’13), Proceedings of the 4th
International Conference on Automotive and Transportation Systems (ICAT ’13), pp.
55-59, 2013

Cercetări privind sistemele de acţionare cu muşchi pneumatici ale echipamentelor de reabilitare a
articulaţiilor membrelor superioare - Rezumat
52
[FIL13b] FILIP, O., DEACONESCU, T. Pneumatically-Actuated Device for Wrist
Rehabilitation, ICEEMS 2013, 7th
International Conference on Economic
Engineering and Manufacturing System, Recent, Vol. 14, no 4, pp. 263-266, 2013
[FIL17a] FILIP, O., DEACONESCU, T. Finite-element analysis of some pneumatically-
actuated wrist-rehabilitation equipment. In MATEC Web of Conferences, Vol. 94, p.
01005, EDP Sciences, 2017
[FIL17b] FILIP, O., DEACONESCU, T. Mathematical modelling of a Fin Ray type
mechanism, used in the case of the wrist rehabilitation equipment. In MATEC Web of
Conferences, Vol. 94, p. 01006, EDP Sciences, 2017
[FIL17c] FILIP, O., DEACONESCU, T. Experimental Research upon a Pneumatic Equipment
for Wrist Recovery, Recent, Vol. 18, no 2 , pp. 99-102, 2017
[GOP16] GOPURA, R.A.R.C., BANDARA, D.S.V., KIGUCHI, K., MANN, G.K.
Developments in hardware systems of active upper-limb exoskeleton robots: A
review. Robotics and Autonomous Systems, 75, pp.203-220, 2016.
[KUT10] KUTNER, N.G., et al. Quality-of-Life Change Associated With Robotic-Assisted
Therapy to Improve Hand Motor Function in Patients With Subacute Stroke: A
Randomized Clinical Trial. Physical Therapy, Vol. 90, no. 4, 2010, p. 493-504
[MEN15] MENG, W., et al., Design and Control of a Robotic Wrist Orthosis for Joint
Rehabilitation*, In IEEE International Conference on Advanced Intelligent
Mechatronics (AIM), Busan, pp. 1235-1240, 2015
[PET12] PETRE, I. - Cercetări privind echipamentele de reabilitare a articulaţiilor portante
acţionate cu ajutorul muşchilor pneumatici. Tezǎ de doctorat, Universitatea
Transilvania din Braşov, 2012
[SBE87] SBENGHE, T. Kinetologie profilactică terapeutică și de recuperare. București:
Editura Medicala, 1987
[SID09] SIDENCO, E. L., Ghid practic de evaluare articulara și musculara in kinetoterapie,
București: Editura Fundației „Romania de Maine”, 2009
[SUT16] SUTTON L., et al., Design of an Assistive Wrist Orthosis Using Conductive Nylon
Actuators, In 6th IEEE RAS/EMBS International Conference on Biomedical Robotics
and Biomechatronics (BioRob), pp. 1074-1079, Singapore, 2016

53
Rezumat
În teza de doctorat intitulată Cercetări privind sistemele de acţionare cu muşchi pneumatici a
echipamentelor de reabilitare a articulaţiilor membrelor superioare este prezentat un echipament
destinat reabilitării încheieturii palmei şi a articulaţiilor degetelor, echipament care este acționat cu
ajutorul unui mușchi pneumatic. Spre deosebire de echipamentele existente, acest echipament
folosește pentru mobilizarea palmei un mecanism care are la bază efectul Fin Ray, mecanism care
mobilizează atât palma cât și degetele. Utilizarea mușchiului pneumatic pentru acționarea
echipamentului prezintă avantajul deplasării fără șocuri la capăt de cursă. Mecanismul utilizat
pentru deplasarea palmei s-a modelat matematic. În urma acestei modelări s-au determinat
unghiurile teoretice pe care le realizează mecanismul, unghiuri care acoperă zona funcțională a
articulației palmei și a articulațiilor degetelor. Modelul matematic a fost confirmat de analiza
cinematică a modelul CAD realizat în ProEngineer. Utilizând softul Adams s-a determinat forța
necesară acționării echipamentului, forță care a fost folosită pentru alegerea mușchiului pneumatic
și verificarea la solicitări mecanice a echipamentului. S-a realizat modelul fizic al echipamentului și
s-au realizat mai multe experimente. Ca urmare a acestor experimente se poate afirma că
echipamentul realizat poate fi utilizat pentru reabilitarea articulației palmei.
Abstract
In the doctoral thesis entitled Research on the Actuation Systems with Pneumatic Muscles of
the Recovery Equipment for Upper Limb Joints there is presented an equipment for wrist recovery,
which is actuated with a pneumatic muscle. Unlike the existing ones, this equipment uses for palm
mobilization a mechanism based on the Fin Ray effect, which mobilizes both palm and fingers.
Using the pneumatic muscle to actuate the equipment has the advantage of the shock-free
movement at the end of the stroke. The mechanism used for moving the palm was mathematically
modelled. As a result of this modelling, the theoretical angles made by the mechanism were
determined, angles covering the functional area of the wrist and knuckles. The mathematical model
was confirmed by the kinematic analysis of the CAD model achieved in ProEngineer. The required
force to actuate the equipment was determined with the Adams software, and used to choose the
pneumatic muscle and to test the equipment at mechanical stresses. The physical model of the
equipment was achieved, and several experiments were made. As a result of these experiments, it
can be said that the achieved equipment can be used for wrist recovery.
54
Curriculum Vitae
FILIP OVIDIU
Data nasterii: 09.06.1970
Adresa: Str. Armoniei, Nr. 9, Bl. 55, Sc. A, Ap. 18, BRASOV
Telefon: +40767510911
Email: [email protected]
EXPERIENTA INGINER PROIECTANT 01.08.2005 – prezent
Firma: Geometric SRL
Oras lucru: Brasov
Departament: Inginerie
Domeniu Activitate Firma: proiectare asistata de calculator in industria auto.
Responsabilitati:
-proiectare. modelare si desen (piese simple, complexe, piese din tabla si
asamblari metalice)
ASISTENT UNIVERSITAR 06.10.1996 - 01.10.2008
Firma:Universitatea Transilvania Brasov
Oras lucru: Brasov
Departament: Inginerie
Domeniu Activitate Firma: Educatie.
Responsabilitati:
-conducator de proiect de an la disciplinele: prioectare CAD, hidraulica,
constructia masinilor-unelte.
-conducator de laborator la disciplinele de mai sus si la disciplina tolerante si
control dimensional.
EDUCATIE Studii:
Liceul Radu Negru din Fagaras absolvit in 1988
Universitatea Transilvania din Braşov
Facultatea de Inginerie Tehnologică
Secţia: Maşini Unelte, absolvită în 1995
Studii Aprofundate
Universitatea Transilvania din Braşov
Facultatea de Inginerie Tehnologică
Specializarea: Sisteme de Fabricaţie Integrate, absolvită în 1996
APTITUDINI Limbi straine:
engleza (mediu)
Operare PC:
Microsoft Office, AutoCAD, Wildfire 4, Creo 2, Catia V4, Catia V5.
Adams

55
Curriculum Vitae
FILIP OVIDIU
Date of birth: 9th June1970
Address: Armoniei Street, No. 9, Bl. 55, Sc. A, Ap. 18, BRASOV
Phone : +40767510911
E-mail: [email protected]
WORK EXPERIENCE DESIGNING ENGINEER 01.08.2005 – present
Company: Geometric SRL
City of the workplace: Brasov
Department: Engineering
Company’s sphere of activity: computer aided design in the automotive industry.
Responsibilities:
-design. modelling and drawing (simple parts, complex parts, sheet-metal parts
and metallic fittings)
ASSISTANT PROFESSOR 06.10.1996 - 01.10.2008
Company: Transilvania University of Brasov
City of workplace: Brasov
Department: Engineering
Company’s sphere of activity: Education.
Responsibilities:
-academic-year project supervisor for the disciplines: CAD design, hydraulics,
machine-tool building.
-head of laboratory for the above disciplines and for the discipline: tolerances
and dimensional control.
EDUCATION Studies:
Radu Negru College in Fagaras, graduated in 1988
Transilvania University of Braşov
Faculty of Technological Engineering
Department: Machine-Tools, graduated in 1995
Advanced Studies
Transilvania University of Braşov
Faculty of Technological Engineering
Specialism: Integrated Manufacturing Systems, graduated in 1996
SKILLS Foreign langages:
English (medium)
Computer skills:
Microsoft Office, AutoCAD, Wildfire 4, Creo 2, Catia V4, Catia V5,
Adams


















