
Revisiting EXTRA for Smooth Distributed Optimization · 90 by the smoothness constant L, the strong...
25
REVISITING EXTRA FOR SMOOTH DISTRIBUTED OPTIMIZATION * 1 HUAN LI † AND ZHOUCHEN LIN ‡ 2 Abstract. EXTRA is a popular method for the dencentralized distributed optimization and has broad applica- 3 tions. This paper revisits the EXTRA. Firstly, we give a sharp complexity analysis for EXTRA with the improved 4 O L μ + 1 1-σ 2 (W) log 1 (1-σ 2 (W)) communication and computation complexities for μ-strongly convex and 5 L-smooth problems, where σ 2 (W ) is the second largest singular value of the weight matrix W . When the strong 6 convexity is absent, we prove the O L + 1 1-σ 2 (W) log 1 1-σ 2 (W) complexities. Then, we use the Catalyst 7 framework to accelerate EXTRA and obtain the O q L μ(1-σ 2 (W)) log L μ(1-σ 2 (W)) log 1 communication and 8 computation complexities for strongly convex and smooth problems and the O q L (1-σ 2 (W)) log 1 (1-σ 2 (W)) 9 complexities for non-strongly convex ones. Our communication complexities of the accelerated EXTRA are only 10 worse by the factors of log L μ(1-σ 2 (W)) and log 1 (1-σ 2 (W)) from the lower complexity bounds for strongly 11 convex and non-strongly convex problems, respectively. 12 Key words. EXTRA, accelerated distributed optimization, near optimal communication complexity. 13 AMS subject classifications. 90C25, 90C30 14 1. Introduction. In this paper, we consider the following convex problem 15 min x∈R n F (x)= 1 m m X i=1 f i (x) (1) 16 in the decentralized distributed environment, where m agents form an undirected communica- 17 tion network and collaboratively solve the above problem. Each agent i privately holds a local 18 objective function f i (x) and can exchange information only with its immediate neighbors. We 19 only consider the network that does not have a centralized agent. Distributed computation has 20 broad applications, ranging from machine learning [8, 10, 2, 1], sensor networks [9], to flow 21 and power control problems [9, 11]. 22 1.1. Literature Review. Distributed optimization has gained significant attention in 23 engineering applications for a long time [5, 37]. The distributed subgradient method was first 24 proposed in [24] with the convergence and convergence rate analysis for the general network 25 topology, and further extended to the asynchronous variant in [21], the stochastic variant in 26 [29] and a study with fixed step-size in [40]. In [15, 7], the accelerated distributed gradient 27 method in the sense of Nesterov has been proposed and [17] gave a different explanation with 28 sharper analysis, which builds upon the accelerated penalty method. Although the optimal 29 computation complexity and near optimal communication complexity (please see Section 30 1.4 for the definition of complexity) were proved in [17], the accelerated distributed gradient 31 method employs multiple consensus after each gradient computation and thus places more 32 burdens in the communication-limited environment. 33 * Submitted to the editors DATE. Funding: Li is sponsored by Zhejiang Lab (grant no. 2019KB0AB02). Lin is supported by NSF China (grant no.s 61625301 and 61731018), Major Research Project of Zhejiang Lab (grant no.s 2019KB0AC01 and 2019KB0AB02) and Beijing Academy of Artificial Intelligence. † College of Computer Science and Technology, Nanjing University of Aeronautics and Astronautics, Nanjing, China([email protected].). Key Lab. of Machine Perception (MOE), School of EECS, Peking University, Beijing, China. This work was done when Huan Li was a Ph.D student at Peking University. ‡ Key Lab. of Machine Perception (MOE), School of EECS, Peking University, Beijing, China ([email protected].). Z. Lin is the corresponding author. 1 This manuscript is for review purposes only.
Transcript of Revisiting EXTRA for Smooth Distributed Optimization · 90 by the smoothness constant L, the strong...

REVISITING EXTRA FOR SMOOTH DISTRIBUTED OPTIMIZATION∗1
HUAN LI† AND ZHOUCHEN LIN‡2
Abstract. EXTRA is a popular method for the dencentralized distributed optimization and has broad applica-3tions. This paper revisits the EXTRA. Firstly, we give a sharp complexity analysis for EXTRA with the improved4O((
Lµ+ 1
1−σ2(W )
)log 1
ε(1−σ2(W ))
)communication and computation complexities for µ-strongly convex and5
L-smooth problems, where σ2(W ) is the second largest singular value of the weight matrix W . When the strong6
convexity is absent, we prove the O((
Lε+ 1
1−σ2(W )
)log 1
1−σ2(W )
)complexities. Then, we use the Catalyst7
framework to accelerate EXTRA and obtain the O(√
Lµ(1−σ2(W ))
log Lµ(1−σ2(W ))
log 1ε
)communication and8
computation complexities for strongly convex and smooth problems and the O(√
Lε(1−σ2(W ))
log 1ε(1−σ2(W ))
)9
complexities for non-strongly convex ones. Our communication complexities of the accelerated EXTRA are only10worse by the factors of
(log L
µ(1−σ2(W ))
)and(log 1
ε(1−σ2(W ))
)from the lower complexity bounds for strongly11
convex and non-strongly convex problems, respectively.12
Key words. EXTRA, accelerated distributed optimization, near optimal communication complexity.13
AMS subject classifications. 90C25, 90C3014
1. Introduction. In this paper, we consider the following convex problem15
minx∈Rn
F (x) =1
m
m∑i=1
fi(x)(1)16
in the decentralized distributed environment, where m agents form an undirected communica-17tion network and collaboratively solve the above problem. Each agent i privately holds a local18objective function fi(x) and can exchange information only with its immediate neighbors. We19only consider the network that does not have a centralized agent. Distributed computation has20broad applications, ranging from machine learning [8, 10, 2, 1], sensor networks [9], to flow21and power control problems [9, 11].22
1.1. Literature Review. Distributed optimization has gained significant attention in23engineering applications for a long time [5, 37]. The distributed subgradient method was first24proposed in [24] with the convergence and convergence rate analysis for the general network25topology, and further extended to the asynchronous variant in [21], the stochastic variant in26[29] and a study with fixed step-size in [40]. In [15, 7], the accelerated distributed gradient27method in the sense of Nesterov has been proposed and [17] gave a different explanation with28sharper analysis, which builds upon the accelerated penalty method. Although the optimal29computation complexity and near optimal communication complexity (please see Section301.4 for the definition of complexity) were proved in [17], the accelerated distributed gradient31method employs multiple consensus after each gradient computation and thus places more32burdens in the communication-limited environment.33
∗Submitted to the editors DATE.Funding: Li is sponsored by Zhejiang Lab (grant no. 2019KB0AB02). Lin is supported by NSF China (grant no.s
61625301 and 61731018), Major Research Project of Zhejiang Lab (grant no.s 2019KB0AC01 and 2019KB0AB02)and Beijing Academy of Artificial Intelligence.†College of Computer Science and Technology, Nanjing University of Aeronautics and Astronautics, Nanjing,
China([email protected].).Key Lab. of Machine Perception (MOE), School of EECS, Peking University, Beijing, China. This work was
done when Huan Li was a Ph.D student at Peking University.‡Key Lab. of Machine Perception (MOE), School of EECS, Peking University, Beijing, China ([email protected].).
Z. Lin is the corresponding author.
1
This manuscript is for review purposes only.

2 H. LI, AND Z. LIN
A different class of distributed approaches with efficient communication are based on the34Lagrangian dual and they work in the dual space. Classical algorithms include dual ascent35[36, 30, 38], ADMM [13, 19, 4] and the primal-dual method [16, 31, 12, 14]. Specifically, the36accelerated dual ascent [30] and the primal-dual method [31] attain the optimal communication37complexities for smooth and nonsmooth problems, respectively. However, the dual based38methods require the evaluation of the Fenchel conjugate or the proximal mapping and thus39have a larger computation cost per-iteration.40
EXTRA [34] and the gradient tracking based method [39, 28] (also named as DIGing in41[23]) can be seen as a trade-off between communications and computations, which need equal42numbers of communications and gradient computations at each iteration. As a comparison,43the accelerated distributed gradient method needs more communications while the dual based44methods require more computations. EXTRA uses the differences of gradients and guarantees45the convergence to the exact optimal solution with constant step-size. The proximal-gradient46variant was studied in [35]. Recently, researchers have established the equivalence between47the primal-dual method and EXTRA [12, 20, 14]. Specifically, [12] studied the nonconvex48problem, [20] focused on the stochastic optimization while [14] gave a unified framework for49EXTRA and the gradient tracking based method. The gradient tracking based method shares50some similar features to EXTRA, e.g., using the differences of gradients and constant step-size.51The accelerated version of the gradient tracking based method was studied in [27].52
In this paper, we revisit EXTRA and give a sharper complexity analysis for the original53EXTRA. Then, we propose an accelerated EXTRA, which answers the open problem proposed54in [35, Section V] on how to improve the rate of EXTRA with certain acceleration techniques.55
1.2. Notation and Assumption. Denote x(i) ∈ Rn to be the local copy of the variable56x for agent i and x(1:m) to be the set of vectors consisting of x(1), · · · , x(m). We introduce57the aggregate objective function f(x) of the local variables with its argument x ∈ Rm×n and58gradient ∇f(x) ∈ Rm×n as59
(2) f(x) =
m∑i=1
fi(x(i)), x =
xT(1)...
xT(m)
, ∇f(x) =
∇f1(x(1))T
...∇fm(x(m))
T
.60
For a given matrix, we use ‖ · ‖F and ‖ · ‖2 to denote its Frobenius norm and spectral norm,61respectively. We denote ‖ · ‖ as the l2 Euclidean norm for a vector. Denote I ∈ Rm×m as the62identity matrix and 1 = (1, 1, · · · , 1)T ∈ Rm as the vector with all ones. For any matrix x,63we denote its average across the rows as64
α(x) =1
m
m∑i=1
x(i).(3)65
Define two operators measuring the consensus violation. The first one is66
Π = I − 1
m11T ∈ Rm×m(4)67
and ‖Πx‖F measures the distance between x(i) and α(x),∀i. The second one follows [34],68
U =
√I −W
2∈ Rm×m.(5)69
Let Ni be the neighbors of agent i and Span(U) be the linear span of all the columns of U .70We make the following assumptions for the local objectives:71
This manuscript is for review purposes only.

REVISITING EXTRA FOR SMOOTH DISTRIBUTED OPTIMIZATION 3
Algorithm 1 EXTRAInput F (x), K, x0(1:m), v
0(1:m)
for k = 0, 1, 2, · · · ,K doxk+1(i) = xk(i) − α
(∇fi(xk(i)) + vk(i) + β
2
(xk(i) −
∑j∈NiWi,jx
k(j)
)),∀i.
vk+1(i) = vk(i) + β
2
(xk+1(i) −
∑j∈NiWi,jx
k+1(j)
),∀i.
end forOutput xK+1
(1:m) and vK+1(1:m).
ASSUMPTION 1.7273
1. Each fi(x) is µ-strongly convex: fi(y) ≥ fi(x) + 〈∇fi(x), y − x〉 + µ2 ‖y − x‖
2.74Specially, µ can be zero and we say fi(x) is convex in this case.75
2. Each fi(x) is L-smooth: fi(y) ≤ fi(x) + 〈∇fi(x), y − x〉+ L2 ‖y − x‖
2.76Then, F (x) and f(x) are also µ-strongly convex and L-smooth. Assume that the set of77minimizers of problem (1) is non-empty. Denote x∗ as one minimizer and x∗ = 1(x∗)T .78
We make the following assumptions for the weight matrix W ∈ Rm×m associated to the79network:80
ASSUMPTION 2.8182
1. Wi,j 6= 0 if and only if agents i and j are neighbors or i = j. Otherwise, Wi,j = 0.832. W = WT , I �W � −I and W1 = 1.843. σ2(W ) < 1, where σ2(W ) is the second largest singular value of W .85
Part 2 of Assumption 2 implies that the singular values of W lie in [0, 1] and its largest one86σ1(W ) equals 1. Moreover, Part 3 can be deduced by part 2 and the assumption that the87network is connected. Examples satisfying Assumption 2 can be found in [34].88
When minimizing a convex function, the performance of the first-order methods is affected89by the smoothness constant L, the strong convexity constant µ, as well as the target accuracy90ε. When we solve the problem over a network, the connectivity of the network also directly91affects the performance. Typically, 1
1−σ2(W ) is a good indication of the network connectivity92
[15, 30] and it is often related to m [22, Proposition 5]. For example, for any connected and93undirected graph, 1
1−σ2(W ) ≤ m2 [22]. In this paper, we study the complexity of EXTRA94
with explicit dependence on L, µ, 1− σ2(W ) and ε.95Denote x0(1:m) to be the initializers. Assume that ‖x0(i) − x
∗‖2 ≤ R1, ‖x∗‖2 ≤ R1 and96
‖∇fi(x∗)‖2 ≤ R2,∀i = 1, · · · ,m. Then we can simply have97
‖x0 − x∗‖2F ≤ mR1, ‖x∗‖2F ≤ mR1 and ‖∇f(x∗)‖2F ≤ mR2.(6)98
In this paper, we only regard R1 and R2 as the constants which can be dropped in our99complexities.100
1.3. Proposed Algorithm. Before presenting the proposed algorithm, we first rewrite101EXTRA in the primal-dual framework in Algorithm 1. When we set α = 1
β , Algorithm 1102
reduces to the original EXTRA 1. In this paper, we specify α = 12(L+β) and β = L for the103
strongly convex problems to give a faster convergence rate than the original EXTRA, which is104crucial to obtain the near optimal communication complexities after acceleration.105
We use the Catalyst framework [18] to accelerate Algorithm 1. It has double loops and106is described in Algorithm 2. The inner loop calls Algorithm 1 to approximately minimize a107
1Initialize v0 = 0 and define W = I+W2
. The second step of Algorithm 1 leads to vk = β∑kt=1(W−W )xk .
Plugging it into the first step and letting α = 1/β, it leads to equation (3.5) in [34].
This manuscript is for review purposes only.

4 H. LI, AND Z. LIN
Algorithm 2 Accelerated EXTRAInitialize x0(i) = y0(i), v
0(i) = 0, q = µ
µ+τ , set θk =√q,∀k if µ > 0, otherwise, set θ0 = 1
and update θk+1 ∈ (0, 1) by solving the equation θ2k+1 = (1− θk+1)θ2k.for k = 0, 1, 2, · · · ,K do
Define gki (x) = fi(x) + τ2‖x− y
k(i)‖
2 and Gk(x) = 1m
∑mi=1 g
ki (x).
(xk+1(1:m), v
k+1(1:m)) = EXTRA(Gk(x), Tk, x
k(1:m), v
k(1:m)).
yk+1(i) = xk+1
(i) + θk(1−θk)θ2k+θk+1
(xk+1(i) − x
k(i)),∀i.
end for
well-chosen auxiliary function of Gk(x) for Tk iterations with warm-start. Tk and τ are given108for two cases:109
1. When each fi(x) is strongly convex with µ > 0, then τ = L(1− σ2(W ))− µ > 0110
and Tk = O(
11−σ2(W ) log L
µ(1−σ2(W ))
), which is a constant.111
2. When each fi(x) is convex with µ = 0, then τ = L(1 − σ2(W )) and Tk =112
O(
11−σ2(W ) log k
1−σ2(W )
), which is nearly a constant.113
Although Algorithm 2 employs the double loop, it places almost no more burdens than the114original EXTRA. A good property of Algorithms 1 and 2 in practice is that they need equal115numbers of gradient computations and communications at each iterations.116
1.4. Complexities. We study the communication and computation complexities of EX-117TRA and its accelerated version in this paper. They are presented as the numbers of com-118munications and computations to find an ε-optimal solution x such that F (x)− F (x∗) ≤ ε.119We follow [17] to define one communication to be the operation that all the agents receive120information from their neighbors once, i.e.,
∑j∈NiWijx(j) for all i = 1, 2, · · · ,m. One121
computation is defined to be the gradient evaluations of all the agents once, i.e., ∇fi(x(i)) for122all i. Note that the gradients are evaluated in parallel on each nodes.123
To find an ε-optimal solution, Algorithm 1 needs O((
Lµ + 1
1−σ2(W )
)log 1
ε(1−σ2(W ))
)124
and O((
Lε + 1
1−σ2(W )
)log 1
1−σ2(W )
)iterations for strongly convex and non-strongly con-125
vex problems, respectively. The computation and communication complexities are identi-126cal for EXTRA, which equal the number of iterations. For Algorithm 2, we establish the127
O(√
Lµ(1−σ2(W )) log L
µ(1−σ2(W )) log 1ε
)complexity for strongly convex problems and the128
O(√
Lε(1−σ2(W )) log 1
ε(1−σ2(W ))
)one for non-strongly convex problems.129
Our first contribution is to give a sharp analysis for EXTRA with improved complexity.130
The complexity of the original EXTRA is at leastO(
L2
µ2(1−σ2(W )) log 1ε
)2 for strongly convex131
problems. For non-strongly convex ones, although the O(1ε
)complexity was studied in [34],132
no explicit dependence on 1 − σ2(W ) was given3. It is remarkable that the sum of Lµ (or133
Lε ) and 1
1−σ2(W ) , rather than their product, dominates our complexities. Recall that the full134
batch centralized gradient descent (GD) performed by a single node need O(Lµ log 1
ε
)and135
2[34] did not give an explicit complexity. We try to simplify equation (3.38) in [34] and find it at leastO(
L2
µ2(1−σ2(W ))log 1
ε
). The true complexity may be larger than O
(L2
µ2(1−σ2(W ))log 1
ε
).
3[34] proved the O(
1K
)rate in the sense of 1
K
∑Kk=1 ‖Uλk + ∇f(xk)‖2
W≤ O
(1K
)and
1K
∑Kk=1 ‖Uxk‖2F ≤ O
(1K
), where W = I+W
2. [34] omitted the dependence on 1− σ2(W ) in their analysis.
This manuscript is for review purposes only.

REVISITING EXTRA FOR SMOOTH DISTRIBUTED OPTIMIZATION 5
Non-strongly convex caseMethods Complexity of gradient computation Complexity of communication
[34]’s result for EXTRA4 O(1ε
)[34] O
(1ε
)[34]
Our result for EXTRA O((
Lε + 1
1−σ2(W )
)log 1
1−σ2(W )
)O((
Lε + 1
1−σ2(W )
)log 1
1−σ2(W )
)Accelerated Dual Ascent O
(L
ε√
1−σ2(W )log2 1
ε
)[38] O
(√L
ε(1−σ2(W ))log 1
ε
)[38]
Accelerated Penalty Method O
(√Lε
)[17] O
(√L
ε(1−σ2(W ))log 1
ε
)[17]
Our Accelerated EXTRA O(√
Lε(1−σ2(W ))
log 1ε(1−σ2(W ))
)O(√
Lε(1−σ2(W ))
log 1ε(1−σ2(W ))
)Lower Bound O
(√Lε
)[25] O
(√L
ε(1−σ2(W ))
)[32]
Strongly convex caseMethods Complexity of gradient computation Complexity of communication
[34]’s result for EXTRA at leastO(
L2
µ2(1−σ2(W ))log 1
ε
)[34] at leastO
(L2
µ2(1−σ2(W ))log 1
ε
)[34]
Our result for EXTRA O((
Lµ + 1
1−σ2(W )
)log 1
ε(1−σ2(W ))
)O((
Lµ + 1
1−σ2(W )
)log 1
ε(1−σ2(W ))
)Accelerated Dual Ascent O
(L
µ√
1−σ2(W )log2 1
ε
)[38] O
(√L
µ(1−σ2(W ))log 1
ε
)[30, 38]
Accelerated Penalty Method O(√
Lµ log 1
ε
)[17] O
(√L
µ(1−σ2(W ))log2 1
ε
)[17]
Our Accelerated EXTRA O(√
Lµ(1−σ2(W ))
log Lµ(1−σ2(W ))
log 1ε
)O(√
Lµ(1−σ2(W ))
log Lµ(1−σ2(W ))
log 1ε
)Lower Bound O
(√Lµ log 1
ε
)[25] O
(√L
µ(1−σ2(W ))log 1
ε
)[30]
TABLE 1Complexity comparisons between the accelerated dual ascent, accelerated penalty method with consensus,
EXTRA and accelerated EXTRA for smooth convex problems.
O(Lε
)iterations to find an ε-optimal solution for strongly convex and non-strongly convex136
problems, respectively [25]. If 11−σ2(W ) is smaller than L
µ (or Lε ), we can see that the gradient137
computation time of EXTRA is nearly 1/m that of the full batch centralized GD since EXTRA138computes m individual gradients in parallel while the full batch centralized GD computes139them sequentially. Thus, EXTRA achieves a linear speed up if we ignore the logarithm factor.140
Our second contribution is to give an accelerated EXTRA with the near optimal commu-141nication complexity and a competitive computation complexity. In Table 1, we summarize the142comparisons to the state-of-art decentralized optimization algorithms, namely, the accelerated143dual ascent and accelerated penalty method with consensus. We also present the complexi-144ties of the non-accelerated EXTRA and the lower complexity bounds. Our communication145complexities of the accelerated EXTRA match the lower bounds except the extra factors146
of(
log Lµ(1−σ2(W ))
)and
(log 1
ε(1−σ2(W ))
)for strongly convex and non-strongly convex147
problems, respectively. When high precision is required, i.e., 1ε >
Lµ(1−σ2(W )) for strongly148
convex problems and 1ε >
11−σ2(W ) for non-strongly convex problems, our communication149
complexities are competitive to the state-of-art ones in [30, 38, 17]. On the other hand,150our computation complexities are better than [38] for applications with large L
ε and Lµ and151
moderate log 11−σ2(W ) , but worse than [17]5. Our result is a significant complement to the152
existing work in the sense that EXTRA and its accelerated version have equal numbers of153communications and computations, while the accelerated dual ascent has more computations154than communications and the accelerated penalty method needs more communications than155computations.156
4[34] did not give a explicit dependence on 11−σ2(W )
.5Although [30] also gives the O
(√Lµlog 1
ε
)computation complexity, [30] defines one computation to be the
cost of solving an ‘argmin’ subproblem. We cite [38] in Table 1, who studies the computation complexity with thetotal number of gradient computations, which is a more reasonable measurement.
This manuscript is for review purposes only.

6 H. LI, AND Z. LIN
1.5. Paper Organization. The rest of the paper is organized as follows. Section 2 gives157a sharper analysis on the original EXTRA and Section 3 develops the accelerated EXTRA.158Section 4 proves the complexities and Section 5 gives some numerical experiments. Finally,159we conclude in Section 6.160
2. Enhanced Results on EXTRA. We give a sharper analysis on EXTRA in this section.161Specifically, section 2.1 studies the strongly convex problems and section 2.2 studies the non-162strongly convex ones, respectively.163
2.1. Sharper Analysis on EXTRA for Strongly Convex Problems. We first describe164EXTRA in the primal-dual form. From Assumption 2 and the definition in (5), we know that165x is consensus if and only if Ux = 0. Thus, we can reformulate problem (1) as the following166linearly constrained problem:167
minx∈Rm×n
f(x), s.t. Ux = 0.(7)168
Introduce the augmented Lagrangian function169
L(x, λ) = f(x) + 〈λ,Ux〉+β
2‖Ux‖2F .170
Problem (7) can be solved by the classical primal-dual method [12, 14]. Specifically, it uses171the Gauss-Seidel-like order to compute the saddle point of the augmented Lagrangian function172and consists of the following iterations:173
xk+1 = xk − 1
2(L+ β)(∇f(xk) + Uλk + βU2xk),(8a)174
λk+1 = λk + βUxk+1,(8b)175176
where we specify the step-size in the primal step as 12(L+β) . Step (8b) involves the operation177
of Ux, which is uncomputable in the distributed environment. We introduce the auxiliary178variable179
vk = Uλk.180181
Multiplying both sides of (8b) by U , it leads to182
vk+1 = vk + βU2xk+1.183184
From the definition of U in (5), we have Algorithm 1. Now, we establish the convergence of185Algorithm 1. Define186
(11) ρk = (L+ β)‖xk − x∗‖2F +1
2β‖λk − λ∗‖2F ,187
where (x∗, λ∗) is a KKT point of the saddle point problem minx maxλ f(x) + 〈λ,Ux〉. We188prove the exponentially diminishing of ρk in the following theorem. Specially, we choose a189smaller β, i.e., a larger step-size α in the primal step than [34] to obtain a faster convergence190rate. More precisely, the original EXTRA uses the step-size of O
(µL2
)[34, Remark 4] and191
an open problem was proposed in [34] on how to prove linear convergence under the larger192step-size of O
(1L
). Our analysis addresses this open problem. We leave the proof in Section193
4.1 and describe the crucial tricks there.194
This manuscript is for review purposes only.

REVISITING EXTRA FOR SMOOTH DISTRIBUTED OPTIMIZATION 7
THEOREM 1. Suppose that Assumptions 1 and 2 hold with µ > 0. Let v0 ∈ Span(U2),195α = 1
2(L+β) and β = L. Then, for Algorithm 1, we have196
ρk+1 ≤ (1− δ) ρk,197
where δ = 1
39(Lµ+ 1
1−σ2(W )
) .198
Based on Theorem 1, we can give the following corollary, which proves that Algorithm199
1 needs O((
Lµ + 1
1−σ2(W )
)log L
ε(1−σ2(W ))
)iterations to find an ε-optimal solution. Recall200
that α(x) is the average of x(1), · · · , x(m) defined in (3).201COROLLARY 2. Under the assumptions of Theorem 1 and let v0 = 0, Algorithm 1 needs202
O
((L
µ+
1
1− σ2(W )
)log
LR1 +R2/L
ε(1− σ2(W ))
)203
iterations to achieve an ε-optimal solution x such that204
F (α(x))− F (x∗) ≤ ε and1
m
m∑i=1
∥∥x(i) − α(x)∥∥2 ≤ ε2.205
2.2. Sharper Analysis on EXTRA for Non-strongly Convex Problems. We study206EXTRA for non-strongly convex problems in this section. Specifically, we study the original207EXTRA in Section 2.2.1 and the regularized EXTRA in Section 2.2.2, respectively.208
2.2.1. Complexity for the Original EXTRA. The O(
1K
)convergence rate of EXTRA209
was well studied in [34, 35]. However, [34, 35] did not establish the explicit dependence on210
1 − σ2(W ). In this section, we study the original EXTRA and give the O(
L
K√
1−σ2(W )
)211
convergence rate in the following lemma.212LEMMA 3. Suppose that Assumptions 1 and 2 hold with µ = 0. Let α = 1
2(L+β) and213
β = L√1−σ2(W )
and define xK = 1K
∑Kk=1 x
k. Assume that K ≥ 1√1−σ2(W )
. Then, for214
Algorithm 1, we have215
F (α(xK))− F (x∗) ≤ 34
K√
1− σ2(W )
(LR1 +
R2
L
),
1
m
m∑i=1
∥∥∥xK(i) − α(xK)∥∥∥2 ≤ 16
K2(1− σ2(W ))
(R1 +
R2
L2
).
216
We assume K ≥ 1√1−σ2(W )
in Lemma 3 and it is a reasonable assumption. Take the217
linear network as an example, where all the agents connect in a line. For this special network218we know 1
1−σ2(W ) = m2 [22]. Algorithm 1 needs at least m iterations to exchange message219
between the two farthest nodes in the network. Thus, any convergent method needs at least2201√
1−σ2(W )iterations.221
In Section 2.1, we establish the O((
Lµ + 1
1−σ2(W )
)log L
ε(1−σ2(W ))
)complexity for222
strongly convex problems. Naturally, one may expect the O(Lε + 1
1−σ2(W )
)complexity for223
non-strongly convex ones. However, Lemma 3 only proves the O(
L
ε√
1−σ2(W )
)complexity.224
We describe the technical challenges in Section 4.2. It is unclear how to establish the faster225rate for the original EXTRA currently and we leave it as an open problem. In the following226section, we improve the complexity via solving a regularized problem.227
This manuscript is for review purposes only.

8 H. LI, AND Z. LIN
2.2.2. Complexity for the Regularized EXTRA. When the complexity for the strongly228convex problems is well studied, the regularization technique is a common way to solve the229non-strongly convex ones [3]. Namely, we add a small strongly convex regularizer to the230objective and solve the regularized problem instead. Define the regularized version of F (x) as231
Fε(x) =1
m
m∑i=1
fi(x) +ε
2‖x‖2(12)232
and denote x∗ε = argminx Fε(x). It can be easily checked that the precisions between233problems (1) and (12) satisfies234
F (x)− F (x∗) ≤ Fε(x)− Fε(x∗ε ) +ε
2‖x∗‖2.(13)235
Thus, to attain an ε-optimal solution of problem (1), we only need to find an ε-optimal solution236of problem (12). Denote Lε = L+ ε. Define237
fε(x) = f(x) +ε
2‖x‖2F238
and it is Lε-smooth and ε-strongly convex. Problem (12) can be reformulated as the following239constrained problem240
minxfε(x), s.t. Ux = 0.(14)241
Denote (x∗ε , λ∗ε ) to be a pair of KKT point of problem (14). We can use Algorithm 1 to242
solve problem (14) and Corollary 2 states that it needs O((
Lε + 1
1−σ2(W )
)log L
ε(1−σ2(W ))
)243
iterations to find an ε-optimal solution of problem (12), which is also an ε-optimal solution of244problem (1).245
When ε ≤ 1− σ2(W ), the complexity of the above regularized EXTRA is dominated by246O(Lε log L
ε
). We want to further reduce the complexity by the
(log L
ε
)factor. As discussed247
in Section 4.2, the main reason for the slow rate of the original EXTRA discussed in Section2482.2.1 is that (L+ β)‖x0 − x∗‖2F + 1
2β ‖λ0 − λ∗‖2F has the same order of magnitude as O(1),249
rather than O(1− σ2(W )). Our motivation is that we may find a good enough initializer in250reasonable time such that (L+β)‖x0−x∗‖2F + 1
2β ‖λ0−λ∗‖2F is of the order O(1−σ2(W )).251
With this inspiration, our algorithm consists of two stage. In the first stage, we run Algorithm2521 for K0 iterations to solve problem (12) and use its output (xK0 , λK0) as the initializer of the253second stage. In the second stage, we run Algorithm 1 on problem (12) again for K iterations254and output the averaged solution xK . Although we analyze the method in two stage, we255implement it in a single loop and only average over the last K iterations.256
The complexity of our two stage regularized EXTRA is described in the following lemma.257
We can see that the complexity is improved from O((
Lε + 1
1−σ2(W )
)log L
ε(1−σ2(W ))
)to258
O((
Lε + 1
1−σ2(W )
)log 1
1−σ2(W )
)via the two stage strategy.259
LEMMA 4. Suppose that Assumptions 1 and 2 hold with µ = 0. Let v0 ∈ Span(U2),260α = 1
2(Lε+β)and β = Lε. Run Algorithm 1 on problem (12). Then, we only need261
O
((L
ε+
1
1− σ2(W )
)log
1
1− σ2(W )
)262
iterations for the first stage and K = O(LR1+R2/L
ε
)iterations for the second stage such that263
Fε(α(xK))− Fε(x∗ε ) ≤ ε and1
m
m∑i=1
∥∥∥xK(i) − α(xK)∥∥∥2 ≤ ε2,264
This manuscript is for review purposes only.

REVISITING EXTRA FOR SMOOTH DISTRIBUTED OPTIMIZATION 9
where xK = 1K
∑Kk=1 x
k in the second stage.265
3. Accelerated EXTRA. We first review Catalyst and then use it to accelerate EXTRA.266
3.1. Catalyst. Catalyst [18] is a general scheme for accelerating gradient-based opti-267mization methods in the sense of Nesterov. It builds upon the inexact accelerated proximal268point algorithm, which consists of the following iterations:269
xk+1 ≈ argminx∈Rn
F (x) +τ
2‖x− yk‖2,(15a)270
yk+1 = xk+1 +θk(1− θk)
θ2k + θk+1(xk+1 − xk),(15b)271
272
where θk is defined in Algorithm 2. Catalyst employs double loop and approximately solves273a sequence of well-chosen auxiliary problems in step (15a) in the inner loop. The following274theorem describes the convergence rate for the outer loop.275
THEOREM 5. [33, 18] Suppose that F (x) is convex and the following criterion holds for276all k ≤ K with εk ≤ 1
k4+2ξ :277
F (xk+1) +τ
2‖xk+1 − yk‖2 ≤ min
x
(F (x) +
τ
2‖x− yk‖2
)+ εk,(16)278
where ξ can be any small positive constant. Then, Catalyst generates iterates (xk)K+1k=0 such279
that280
F (xK+1)− F (x∗) ≤ 1
(K + 2)2
(6τ‖x0 − x∗‖2 +
48
ξ2+
12
1 + 2ξ
).281
Suppose that F (x) is µ-strongly convex and (16) holds for all k ≤ K with the precision of282
εk ≤ 2(F (x0)−F (x∗))9 (1 − ρ)k+1, where ρ <
√q and q = µ
µ+τ . Then, Catalyst generates283
iterates (xk)K+1k=0 such that284
F (xK+1)− F (x∗) ≤ 8
(√q − ρ)2
(1− ρ)K+2(F (x0)− F (x∗)).285
Briefly, Catalyst uses some linearly convergent method to solve the subproblem in step286(15a) with warm-start, balances the outer loop and inner loop and attains the near optimal287global complexities.288
3.2. Accelerating EXTRA via Catalyst. We first establish the relation between Algo-289rithm 2 and Catalyst. Recall the definition of Gk(x) in Algorithm 2:290
Gk(x) =1
m
m∑i=1
gki (x), where gki (x) = fi(x) +τ
2‖x− yk(i)‖
2,291
which is (L+ τ)-smooth and (µ+ τ)-strongly convex. Denote Lg = L+ τ and µg = µ+ τ292for simplicity. We can easily check that293
Gk(x) =1
m
m∑i=1
fi(x) +τ
2
m∑i=1
1
m‖x− yk(i)‖
2
=1
m
m∑i=1
fi(x) +τ
2‖x− α(yk)‖2 − τ
2‖α(yk)‖2 +
τ
2
m∑i=1
1
m‖yk(i)‖
2.
294
This manuscript is for review purposes only.

10 H. LI, AND Z. LIN
Recall that α(yk) is the average of yk(1), · · · , yk(m) defined in (3). In Algorithm 2, we call295
EXTRA to minimize Gk(x) approximately, i.e., to minimize F (x) + τ2‖x− α(yk)‖2. Thus,296
Algorithm 2 can be interpreted as297
α(xk+1) ≈ argminx
F (x) +τ
2‖x− α(yk)‖2,
α(yk+1) = α(xk+1) +θk(1− θk)
θ2k + θk+1(α(xk+1)− α(xk)),
298
and it belongs to the Catalyst framework. Thus, we only need to ensure (16), i.e.,Gk(α(xk+1))299≤ minxG
k(x) + εk for all k. Catalyst requires the liner convergence in the form of300
Gk(zt)−minxGk(x) ≤ (1− δ)t
(Gk(z0)−min
xGk(x)
)301
when solving the subproblem in step (15a), which is not satisfied for Algorithm 1 due to the302existence of terms ‖λk − λ∗‖2F and ‖λk+1 − λ∗‖2F in Theorem 1. Thus, the conclusion in303[18] cannot be directly applied to Algorithm 2. By analyzing the inner-loop carefully, we can304have the following theorem, which establishes that a suitable constant setup of Tk is sufficient305to ensure (16) in the strongly convex case and thus allows us to use the Catalyst framework to306distributed optimization, where Tk is the number of inner iterations when calling Algorithm 1.307
THEOREM 6. Suppose that Assumptions 1 and 2 hold with µ > 0. We only need to308
set Tk = O((
L+τµ+τ + 1
1−σ2(W )
)log L+τ
µ(1−σ2(W ))
)in Algorithm 2 such that Gk(α(xk+1)) ≤309
minxGk(x) + εk holds for all k, where εk is defined in Theorem 5.310
Based on Theorems 5 and 6, we can establish the global complexity via finding the311optimal balance between the inner-loop and outer-loop. Specifically, the total number of inner312iterations is313
√1+ τ
µ log 1ε∑
k=0
Tk =
√1 +
τ
µ
(L+ τ
µ+ τ+
1
1− σ2(W )
)log
L+ τ
µ(1− σ2(W ))log
1
ε.314
We obtain the minimal value with the optimal setting of τ , which is described in the following315corollary. On the other hand, when we set τ ≈ 0, it approximates the original EXTRA.316
COROLLARY 7. Under the settings of Theorem 6 and letting τ = L(1 − σ2(W )) − µ,317Algorithm 2 needs318
O
(√L
µ(1− σ2(W ))log
L
µ(1− σ2(W ))log
1
ε
)319
total inner iterations to achieve an ε-optimal solution such that320
F (α(x))− F (x∗) ≤ ε and1
m
m∑i=1
∥∥x(i) − α(x)∥∥2 ≤ ε2.321
When the strong-convexity is absent, we have the following conclusions, which are the322counterparts of Theorem 6 and Corollary 7.323
THEOREM 8. Suppose that Assumptions 1 and 2 hold with µ = 0. We only need to324
set Tk = O((
L+ττ + 1
1−σ2(W )
)log k
1−σ2(W )
)in Algorithm 2 such that Gk(α(xk+1)) ≤325
minxGk(x) + εk holds for all k.326
This manuscript is for review purposes only.

REVISITING EXTRA FOR SMOOTH DISTRIBUTED OPTIMIZATION 11
COROLLARY 9. Under the settings of Theorem 8 and letting τ = L(1− σ2(W )), Algo-327rithm 2 needs328
O
(√L
ε(1− σ2(W ))log
1
ε(1− σ2(W ))
)329
total inner iterations to achieve an ε-optimal solution such that330
F (α(x))− F (x∗) ≤ ε and1
m
m∑i=1
∥∥x(i) − α(x)∥∥2 ≤ ε2.331
The accelerated EXTRA needs to know 11−σ2(W ) in advance to set Tk and τ . Generally332
speaking, 11−σ2(W ) relates to the global connectivity of the network. [22, Proposition 5] gives333
the estimation of 11−σ2(W ) by m for many frequently-used networks, e.g., the 2-D graph,334
geometric graph, expander graph and the Erdos-Renyi random graph. Please see [22] for the335details.336
4. Proof of Theorems. In this section, we give the proofs of the theorems, corollaries337and lemmas in Sections 2 and 3. We first present several supporting lemmas, which will be338used in our analysis.339
LEMMA 10. Assume that Assumption 2 holds. Then, we have ‖Πx‖F≤√
21−σ2(W)‖Ux‖F .340
The proof is similar to that of [17, Lemma 4] and we omit the details.341LEMMA 11. Suppose that x∗ is the optimal solution of problem (7). There exists λ∗ ∈342
Span(U) such that (x∗, λ∗) is a KKT point of the saddle point problem minx maxλ f(x) +343
〈λ,Ux〉. For λ∗ and any λ ∈ Span(U), we have ‖λ∗‖F ≤√2‖∇f(x∗)‖F√1−σ2(W )
and ‖U(λ−λ∗)‖2F ≥344
1−σ2(W )2 ‖λ− λ∗‖2F .345
The existence of λ∗ ∈ Span(U) was proved in [34, Lemma 3.1] and ‖λ∗‖F ≤ ‖∇f(x∗)‖F
σmin(U)346
was proved in [16, Theorem 2], where σmin(U) denotes the smallest nonzero singular value of347
U and it is equal to√
1−σ2(W )2 . The last inequality can be obtained from a similar induction348
to the proof of Lemma 10 and we omit the details. From Lemma 11 we can see that when we349study the complexities on the dependence of 1−σ2(W ), we should deal with ‖λ∗‖F carefully.350‖λ∗‖F cannot be regarded as a constant that can be dropped in the complexities.351
LEMMA 12. Assume that f(x) is µ-strongly convex and L-smooth. Then, we have352
µ
2‖x− x∗‖2F ≤ f(x)− f(x∗) + 〈λ∗, Ux〉 ≤ L
2‖x− x∗‖2F .(17)353
Assume that f(x) is convex and L-smooth. Then, we have354
1
2L‖∇f(x) + Uλ∗‖2F ≤ f(x)− f(x∗) + 〈λ∗, Ux〉 .(18)355
Proof: We can easily see that f(x) + 〈λ∗, Ux〉 is µ-strongly convex and L-smooth in x. Since356x∗ = argminx f(x) + 〈λ∗, Ux〉 and Ux∗ = 0, we have (17). From∇f(x∗) + Uλ∗ = 0 and357the smoothness of f(x) + 〈λ∗, Ux〉 [26, Theorem 2.1.5], we have (18). �358
LEMMA 13. Suppose that Assumptions 1 and 2 hold with µ = 0. Assume that f(x) −359f(x∗) + 〈λ∗, Ux〉 ≤ ε1 and ‖Ux‖F ≤ ε2. Then, we have360
F (α(x))− F (x∗) ≤ 1
m
(ε1 +
3‖∇f(x∗)‖F + 2L‖x− x∗‖F√1− σ2(W )
ε2 +L
1− σ2(W )ε22
).361
This manuscript is for review purposes only.

12 H. LI, AND Z. LIN
Proof: Recall that 1m11Tx = 1(α(x))T from (3) and x∗ = 1(x∗)T . From the definitions362
of F (x) and f(x) in (1) and (2), respectively, we have F (α(x)) = 1mf
(1m11Tx
)and363
F (x∗) = 1mf(x∗). Thus, we only need to bound f
(1m11Tx
)− f(x∗).364
f
(1
m11Tx
)− f(x∗)
=f
(1
m11Tx
)− f(x) + f(x)− f(x∗)
a≤⟨∇f(x),
1
m11Tx− x
⟩+L
2‖Πx‖2F + f(x)− f(x∗)
b≤ (‖∇f(x∗)‖F + L‖x− x∗‖F ) ‖Πx‖F +
L
2‖Πx‖2F + f(x)− f(x∗)
c≤ (‖∇f(x∗)‖F + L‖x− x∗‖F )
√2
1− σ2(W )‖Ux‖F +
L
1− σ2(W )‖Ux‖2F
+ f(x)− f(x∗) + 〈λ∗, Ux〉+ ‖λ∗‖F ‖Ux‖Fd≤ (‖∇f(x∗)‖F + L‖x− x∗‖F )
√2
1− σ2(W )‖Ux‖F +
L
1− σ2(W )‖Ux‖2F
+ f(x)− f(x∗) + 〈λ∗, Ux〉+
√2‖∇f(x∗)‖F√1− σ2(W )
‖Ux‖F ,
365
where we use the smoothness of f(x) and (4) ina≤ and
b≤, Lemma 10 and −〈λ∗, Ux〉 ≤366
‖λ∗‖F ‖Ux‖F inc≤ and Lemma 11 in
d≤. �367
The following lemma is the well-known coerciveness property of the proximal operator.368LEMMA 14. [18, Lemma 22] Given a convex function F (x) and a positive constant τ ,369
define p(y) = argminx F (x) + τ2‖x− y‖
2. For any y and y′, the following inequality holds,370
‖y − y′‖ ≥ ‖p(y)− p(y′)‖.371
At last, we study the regularized problem (14).372LEMMA 15. Suppose that Assumptions 1 and 2 hold with µ = 0. Then, we have ‖x∗ −373
x∗ε‖F ≤ ‖x∗‖F and ‖x∗ε‖F ≤ 2‖x∗‖F .374The proof is similar to that of [3, Claim 3.4]. We omit the details.375
4.1. Proofs of Theorem 1 and Corollary 2. Now, we prove Theorem 1, which is based376on the following lemma. It gives a progress in one iteration of Algorithm 1. Some techniques in377this proof have already appeared in [34] and we present the proof for the sake of completeness.378
LEMMA 16. Suppose that Assumptions 1 and 2 hold with µ = 0. Then, for procedure379(8a)-(8b), we have380
f(xk+1)− f(x∗) +⟨λ∗, Uxk+1
⟩≤(L+ β)‖xk − x∗‖2F − (L+ β)‖xk+1 − x∗‖2F
+1
2β‖λk − λ∗‖2F −
1
2β‖λk+1 − λ∗‖2F −
β + L
2‖xk+1 − xk‖2F .
(19)381
This manuscript is for review purposes only.

REVISITING EXTRA FOR SMOOTH DISTRIBUTED OPTIMIZATION 13
Proof: From the L-smoothness and convexity of f(x), we have382
f(xk+1) ≤f(xk) +⟨∇f(xk),xk+1 − xk
⟩+L
2‖xk+1 − xk‖2F
=f(xk) +⟨∇f(xk),x∗ − xk
⟩+⟨∇f(xk),xk+1 − x∗
⟩+L
2‖xk+1 − xk‖2F
≤f(x∗) +⟨∇f(xk),xk+1 − x∗
⟩+L
2‖xk+1 − xk‖2F .
383
Plugging (8a) into the above inequality, adding⟨λ∗, Uxk+1
⟩to both sides and rearranging the384
terms, we have385
f(xk+1)− f(x∗) +⟨λ∗, Uxk+1
⟩≤−
⟨2(L+ β)(xk+1 − xk) + Uλk + βU2xk,xk+1 − x∗
⟩+L
2‖xk+1 − xk‖2F +
⟨λ∗, Uxk+1
⟩a=− 2(L+ β)
⟨xk+1 − xk,xk+1 − x∗
⟩− 1
β
⟨λk − λ∗, λk+1 − λk
⟩− β
⟨Uxk, Uxk+1
⟩+L
2‖xk+1 − xk‖2F ,
386
where we use Ux∗ = 0 and (8b) in a=. Using the identity of 2 〈a, b〉 = ‖a‖2 +‖b‖2−‖a−b‖2,387
we have388
f(xk+1)− f(x∗) +⟨λ∗, Uxk+1
⟩≤(L+ β)‖xk − x∗‖2F − (L+ β)‖xk+1 − x∗‖2F
+1
2β‖λk − λ∗‖2F −
1
2β‖λk+1 − λ∗‖2F +
1
2β‖λk+1 − λk‖2F
− β
2‖Uxk‖2F −
β
2‖Uxk+1‖2F +
β
2‖Uxk+1 − Uxk‖2F −
(L
2+ β
)‖xk+1 − xk‖2F
b≤(L+ β)‖xk − x∗‖2F − (L+ β)‖xk+1 − x∗‖2F
+1
2β‖λk − λ∗‖2F −
1
2β‖λk+1 − λ∗‖2F −
β + L
2‖xk+1 − xk‖2F ,
389
where we use (8b) and ‖U‖22 ≤ 1 inb≤. �390
A crucial property in (19) is that we keep the term −β+L2 ‖xk+1 − xk‖2F , which will be391
used in the following proof to eliminate term(1ν − 1
) 9(L+β)2
2L ‖xk+1 − xk‖2F to attain (21).392In the following proof of Theorem 1, we use the strong-convexity and smoothness of f(x) to393obtain two inequalities, i.e., (21) and (22). A convex combination leads to (23). The key thing394here is to design the parameters carefully. Otherwise, we may only obtain a suboptimal result395with a worse dependence on L
µ and 11−σ2(W ) .396
Proof of Theorem 1: We use (18) to upper bound ‖λk+1 − λ∗‖2F . From procedure (8a)-(8b),397we have398
2(L+ β)(xk+1 − xk
)+∇f(xk) + Uλk+1 + βU2(xk − xk+1) = 0.399
This manuscript is for review purposes only.

14 H. LI, AND Z. LIN
Thus, we obtain400
1
2L‖∇f(xk+1) + Uλ∗‖2F
=1
2L
∥∥2(L+β)(xk+1−xk
)+βU2(xk−xk+1)+∇f(xk)−∇f(xk+1)+U(λk+1−λ∗)
∥∥2F
c≥1− ν
2L‖U(λk+1 − λ∗)‖2F
− 1/ν−1
2L
∥∥2(L+β)(xk+1−xk
)+βU2(xk−xk+1)+∇f(xk)−∇f(xk+1)
∥∥2F
d≥ (1− ν)(1− σ2(W ))
4L‖λk+1 − λ∗‖2F −
(1
ν− 1
)9(L+ β)2
2L‖xk+1 − xk‖2F ,
(20)401
where we use ‖a+ b‖2 ≥ (1− ν)‖a‖2 − (1/ν − 1)‖b‖2 for some ν ∈ (0, 1) inc≥, Lemma 11402
and the smoothness of f(x) ind≥. Lemma 11 requires λk ∈ Span(U). From the initialization403
and (8b), we know it holds for all k.404
Letting ν = 9(β+L)9(β+L)+L , then
(1ν − 1
) 9(L+β)2
2L = L+β2 . Plugging ν into the above405
inequality and using (18) and (19), we have406
1− σ2(W )
36(β + L) + 4L‖λk+1 − λ∗‖2F ≤(L+ β)‖xk − x∗‖2F − (L+ β)‖xk+1 − x∗‖2F
+1
2β‖λk − λ∗‖2F −
1
2β‖λk+1 − λ∗‖2F .
(21)407
From (17) and (19), we also have408
µ
2‖xk+1 − x∗‖2F ≤(L+ β)‖xk − x∗‖2F − (L+ β)‖xk+1 − x∗‖2F
+1
2β‖λk − λ∗‖2F −
1
2β‖λk+1 − λ∗‖2F .
(22)409
Multiplying (21) by η, multiplying (22) by 1− η, adding them together and rearranging the410terms, we have411 (
L+ β +(1− η)µ
2
)‖xk+1 − x∗‖2F +
(1
2β+
η(1− σ2(W ))
36(β + L) + 4L
)‖λk+1 − λ∗‖2F
≤ (L+ β)‖xk − x∗‖2F +1
2β‖λk − λ∗‖2F .
(23)412
Letting (1−η)µ2(L+β) = βη(1−σ2(W ))
18(β+L)+2L , we have η =µ
2(L+β)
µ2(L+β)
+β(1−σ2(W ))
18(β+L)+2L
. Plugging it into (23) and413
recalling the definition of ρk in (11), it leads to414 (1 +
µβ(1− σ2(W ))
µ(18(β + L) + 2L) + 2(L+ β)β(1− σ2(W ))
)ρk+1 ≤ ρk.415
We can easily check416
µβ(1− σ2(W ))
µ(18(β + L) + 2L) + 2(L+ β)β(1− σ2(W ))
=µ(1− σ2(W ))
20Lµβ + 2β(1− σ2(W )) + 2L(1− σ2(W )) + 18µ
e≥ 1
38
µ(1− σ2(W ))
L(1− σ2(W )) + µ
417
This manuscript is for review purposes only.

REVISITING EXTRA FOR SMOOTH DISTRIBUTED OPTIMIZATION 15
by letting β = L ine≥. Thus, we have the conclusion. �418
At last, we prove Corollary 2.419Proof: From Theorem 1, λ0 = 0, (6), β = L and Lemma 11, we have420
(L+ β)‖xk − x∗‖2F +1
2β‖λk − λ∗‖2F ≤ (1− δ)k
((L+ β)‖x0 − x∗‖2F +
1
2β‖λ∗‖2F
)≤ (1− δ)k 2m(LR1 +R2/L)
1− σ2(W ).
(24)421
On the other hand, from x∗ = 1(x∗)T , the definition of α(x) in (3), the convexity of ‖ · ‖2422and the smoothness of F (x), we have423
1
m‖xk − x∗‖2F =
1
m
m∑i=1
‖xk(i) − x∗‖2 ≥ ‖α(xk)− x∗‖2 ≥ 2
L
(F (α(xk))− F (x∗)
).(25)424
So we have425
F (α(xk))− F (x∗) ≤ (1− δ)k LR1 +R2/L
1− σ2(W ).426
On the other hand, since 1m
∑mi=1
∥∥x(i) − α(x)∥∥2 = 1
m‖Πx‖2F , we only need to bound427‖Πx‖2F .428
‖Πxk‖2Fa≤ 2
1− σ2(W )‖Uxk‖2F
b=
2
(1− σ2(W ))β2‖λk − λk−1‖2F
≤ 4
(1− σ2(W ))β2
(‖λk − λ∗‖2F + ‖λk−1 − λ∗‖2F
)c≤ 16
(1− σ2(W ))β
((L+ β)‖xk−1 − x∗‖2F +
1
2β‖λk−1 − λ∗‖2F
)d≤ (1− δ)k−1 32m(R1 +R2/L
2)
(1− σ2(W ))2,
(26)429
where we use Lemma 10 ina≤, (8b) in b
=, ‖λk−λ∗‖2F ≤ 2βρk ≤ 2βρk−1 and ‖λk−1−λ∗‖2F ≤430
2βρk−1 inc≤, (24) and β = L in
d≤. The proof completes. �431
4.2. Proofs of Lemmas 3 and 4. Lemma 3 only proves the O(
L
K√
1−σ2(W )
)conver-432
gence rate, rather than O(LK
). In fact, from Lemma 13, to prove the O
(1K
)convergence433
rate, we should establish ‖Ux‖F ≤ O(√
m(1−σ2(W ))
K
). However, from (29), we know that434
‖Ux‖F has only the same order of magnitude as O(√
mK
√R1 + R2
β2(1−σ2(W ))
). We find that435
β = L√1−σ2(W )
is the best choice to balance the terms in (31).436
Proof of Lemma 3: Summing (19) over k = 0, 1, · · · ,K − 1, dividing both sides by K, using437the convexity of f(x) and the definition of xK , we have438
f(xK)− f(x∗) +⟨λ∗, U xK
⟩≤ 1
K
((L+ β)‖x0 − x∗‖2F +
1
2β‖λ0 − λ∗‖2F
).(27)439
On the other hand, since f(x)− f(x∗) + 〈λ∗, Ux〉 ≥ 0,∀x from (18), we also have440
(L+ β)‖xk − x∗‖2F ≤ (L+ β)‖x0 − x∗‖2F +1
2β‖λ0 − λ∗‖2F , ∀k = 1, · · · ,K(28)441
This manuscript is for review purposes only.

16 H. LI, AND Z. LIN
and442
1
2β‖λK − λ∗‖2F ≤ (L+ β)‖x0 − x∗‖2F +
1
2β‖λ0 − λ∗‖2F443
from (19). Using (8b) and the definition of xK , we further have444
‖U xK‖2F =1
β2K2‖λK − λ0‖2F
≤ 2
β2K2‖λK − λ∗‖2F +
2
β2K2‖λ0 − λ∗‖2F
≤ 4
K2
(L+ β
β‖x0 − x∗‖2F +
1
β2‖λ0 − λ∗‖2F
).
(29)445
Summing (28) over k = 1, 2, · · · ,K, dividing both sides by K, using the convexity of ‖ · ‖2F446and the definition of xK , we have447
(L+ β)‖xK − x∗‖2F ≤ (L+ β)‖x0 − x∗‖2F +1
2β‖λ0 − λ∗‖2F , ∀k = 1, · · · ,K.(30)448
From (27), (29), (30) and Lemma 13, we have449
F (α(xK))−F (x∗)≤ 1
mK
((1+
8L
Kβ(1−σ2(W ))
)((L+β)‖x0−x∗‖2F +
1
2β‖λ∗‖2F
)+
6‖∇f(x∗)‖F√1− σ2(W )
(√L+ β
β‖x0 − x∗‖2F +
1
β2‖λ∗‖2F
)
+4L√
1−σ2(W )
√L+β
β
(‖x0−x∗‖2F +
1
β(L+β)‖λ∗‖2F
)).
(31)450
Plugging ‖λ∗‖2F ≤2‖∇f(x∗)‖2F1−σ2(W ) , (6) and the setting of β into the above inequality, after some451
simple computations, we have the first conclusion. Similarly, from (29) and Lemma 10, we452have the second conclusion. �453Proof of Lemma 4: For the first stage, from a modification of (24) on problem (14), we know454that Algorithm 1 needs455
K0 = O
((Lεε
+1
1− σ2(W )
)log
1
1− σ2(W )
)456
iterations such that457
(Lε + β)‖xK0 − x∗ε‖2F +1
2β‖λK0 − λ∗ε‖2F ≤ m(1− σ2(W )) (LεR1 +R2/Lε) .(32)458
Let (xK0 , λK0) be the initialization of the second stage. From a modification of (31) on459problem (12), we have460
Fε(α(xK))− Fε(x∗ε ) ≤1
mK
((1 +
8LεKβ(1− σ2(W ))
)m(1− σ2(W ))(LεR1 +R2/Lε)
+6‖∇fε(x∗ε )‖F√
1− σ2(W )
√2m(1− σ2(W ))(LεR1 +R2/Lε)
β
+4Lε√
1−σ2(W )
√Lε+β
β
2m(1−σ2(W ))(LεR1+R2/Lε)
Lε + β
).
461
This manuscript is for review purposes only.

REVISITING EXTRA FOR SMOOTH DISTRIBUTED OPTIMIZATION 17
From the definition of fε(x), the smoothness of f(x), Lemma 15 and (6), we have ‖∇fε(x∗ε )‖F462≤ ‖∇f(x∗)‖F+L‖x∗ε−x∗‖F+ε‖x∗ε‖F ≤
√mR2+2Lε
√mR1 ≤
√8mLε(LεR1 +R2/Lε).463
From β = Lε and after some simple calculations, we have464
Fε(α(xK))− Fε(x∗ε ) ≤41(LεR1 +R2/Lε)
K.465
On the other hand, from Lemma 10, (29), (32) and β = Lε, we have466
‖ΠxK‖2F ≤1
1− σ2(W )‖U xK‖2F ≤
8m(R1 +R2/L2ε)
K2.467
Thus, the second stage needs K = O(LεR1+R2/Lε
ε
)iterations such that Fε(α(xK)) −468
Fε(x∗ε ) ≤ ε and 1
m
∑mi=1
∥∥∥xK(i) − α(xK)∥∥∥2 ≤ ε2. �469
4.3. Proofs of Theorems 6 and 8. We consider the strongly convex problems in Section4704.3.1 and the non-strongly convex ones in Section 4.3.2, respectively.471
4.3.1. Strongly Convex Case. In this section, we prove Theorem 6. Define472
xk,∗ = argminx
Gk(x) = argminx
F (x) +τ
2‖x− α(yk)‖2473
and denote (xk,∗, λk,∗) to be a KKT point of the saddle point problem minx maxλ gk(x) +474
〈λ,Ux〉, where gk(x) ≡ f(x) + τ2‖x − yk‖2F . Then, we know xk,∗ = 1(xk,∗)T . Let475
(xk,t, Uλk,t)Tk+1t=0 be the iterates generated by Algorithm 1 at the k-th iteration of Algorithm476
2. Then, xk,0 = xk and xk,Tk+1 = xk+1. Define477
ρk,t = (Lg + βg) ‖xk,t − xk,∗‖2F +1
2βg‖λk,t − λk,∗‖2F ,478
where we set βg = Lg . Similar to (25), we have479
Gk(α(xk+1))−Gk(xk,∗) = Gk(α(xk,Tk+1))−Gk(xk,∗) ≤ 1
2mρk,Tk .480
Thus, we only need to prove ρk,Tk ≤ 2mεk. Moreover, we prove a sharper result of ρk,Tk ≤4812m(1− σ2(W ))εk by induction in the following lemma. The reason is that we want to prove482‖ΠxK+1‖2F ≤ O (mεK) and thus we need to eliminate 1− σ2(W ) in (34).483
LEMMA 17. Suppose that Assumptions 1 and 2 hold with µ > 0. If ρr,Tr ≤ 2m(1 −484σ2(W ))εr holds for all r ≤ k − 1 and we initialize xk,0 = xk−1,Tk−1+1 and λk,0 =485
λk−1,Tk−1+1, then we only need Tk = O((
Lgµg
+ 11−σ2(W )
)log
Lgµ(1−σ2(W ))
)such that486
ρk,Tk ≤ 2m(1− σ2(W ))εk.487Proof: From Theorem 1 and (26), we have488
ρk,Tk ≤ (1− δg)Tk ρk,0,(33)489
‖Πxk+1‖2F = ‖Πxk,Tk+1‖2F ≤16
βg(1− σ2(W ))ρk,Tk ,(34)490
This manuscript is for review purposes only.

18 H. LI, AND Z. LIN
where δg = 1
39(Lgµg
+ 11−σ2(W )
) . From the initialization and Theorem 1, we have491
ρk,0 = (Lg + βg) ‖xk−1,Tk−1+1 − xk,∗‖2F +1
2βg‖λk−1,Tk−1+1 − λk,∗‖2F
≤2 (Lg + βg) ‖xk−1,Tk−1+1 − xk−1,∗‖2F +1
βg‖λk−1,Tk−1+1 − λk−1,∗‖2F
+ 2 (Lg + βg) ‖xk,∗ − xk−1,∗‖2F +1
βg‖λk,∗ − λk−1,∗‖2F
≤2ρk−1,Tk−1+ 2 (Lg + βg) ‖xk,∗ − xk−1,∗‖2F +
1
βg‖λk,∗ − λk−1,∗‖2F .
(35)492
From the fact that xk,∗ = 1(xk,∗)T , we have493
‖xk,∗ − xk−1,∗‖2F =m‖xk,∗ − xk−1,∗‖2a≤ m‖α(yk)− α(yk−1)‖2
b≤
m∑i=1
‖yk(i) − yk−1(i) ‖
2 = ‖yk − yk−1‖2F ,(36)494
wherea≤ uses Lemma 14 and
b≤ uses the definition of α(y) and the convexity of ‖ · ‖2. From495
Lemma 11, we know496
‖λk,∗ − λk−1,∗‖2F ≤2
1− σ2(W )‖Uλk,∗ − Uλk−1,∗‖2F .(37)497
Recall that (xk,∗, λk,∗) is a KKT point of minx maxλ gk(x) + 〈λ,Ux〉 and gk(x) = f(x) +498
τ2‖x− yk‖2F . From the KKT condition, we have Uλk,∗ +∇gk(xk,∗) = 0. Thus, we have499
‖Uλk,∗ − Uλk−1,∗‖2F=∥∥∇f(xk,∗) + τ(xk,∗ − yk)−∇f(xk−1,∗)− τ(xk−1,∗ − yk−1)
∥∥2F
c≤2 (L+ τ)
2 ‖xk,∗ − xk−1,∗‖2F + 2τ2‖yk − yk−1‖2Fd≤4L2
g‖yk − yk−1‖2F ,
(38)500
wherec≤ uses the L-smoothness of f(x) and
d≤ uses (36) and Lg = L + τ . Combing (35),501
(36), (37) and (38) and using βg = Lg , we have502
ρk,0 ≤ 2ρk−1,Tk−1+
(4Lg +
8Lg1− σ2(W )
)‖yk − yk−1‖2F .(39)503
From a similar induction to the proof of [18, Proposition 12] and the relations in Algorithm 2,504we have505
‖yk − yk−1‖2F ≤2‖yk − x∗‖2F + 2‖yk−1 − x∗‖2F≤4(1 + ϑk)2‖xk − x∗‖2F + 4ϑ2k‖xk−1 − x∗‖2F
+ 4(1 + ϑk−1)2‖xk−1 − x∗‖2F + 4ϑ2k−1‖xk−2 − x∗‖2F≤40 max{‖xk − x∗‖2F , ‖xk−1 − x∗‖2F , ‖xk−2 − x∗‖2F },
(40)506
where we denote ϑk = θk−1(1−θk−1)θ2k−1+θk
and use ϑk ≤ 1,∀k. The later can be obtained by507
ϑk =√q−q√q+q ≤ 1 for µ > 0 and ϑk = θk−1(1−θk−1)
θ2k−1/θk≤ θk
θk−1≤ 1 for µ = 0.508
This manuscript is for review purposes only.

REVISITING EXTRA FOR SMOOTH DISTRIBUTED OPTIMIZATION 19
Since ρr,Tr ≤ 2mεr for all r ≤ k−1, i.e.,Gr(α(xr+1))−Gr(xr,∗) ≤ εr, from Theorem5095 we know the following conclusion holds for all r ≤ k − 1:510
F (α(xr+1))− F (x∗) ≤ 36
(√q − ρ)2
εr+1,(41)511
where we use the definition of εr in Theorem 5, Thus, we have512
‖xk − x∗‖2Fe=‖1(α(xk))T + Πxk − 1(x∗)T ‖2F≤2m‖α(xk)− x∗‖2 + 2‖Πxk‖2Ff
≤4m
µ(F (α(xk))− F (x∗)) +
32ρk−1,Tk−1
βg(1− σ2(W ))g
≤ 144mεkµ(√q − ρ)2
+64mεk−1
βg
(42)513
where we use the definitions of Πx and α(x) in e=, the µ-strong convexity of F (x) and (34) in514
f
≤, (41) and the induction condition of ρk−1,Tk−1≤ 2m(1− σ2(W ))εk−1 in
g
≤.515Combing (33), (39), (40), (42) and using ρk−1,Tk−1
≤ 2m(1− σ2(W ))εk−1, we have516
ρk,Tk ≤(1− δg)Tkεk(
4m
1−ρ+
(4Lg +
8Lg1−σ2(W )
)40
(1−ρ)3
(144mεk
µ(√q−ρ)2
+64mεk−1
βg
))h≤(1− δg)Tk
99844mLgµ(1− σ2(W ))(1− ρ)3(
√q − ρ)2
εk ≡ (1− δg)TkC1εk,
517
where we use√q − ρ < 1, εk ≤ εk−1 and βg ≥ µ in
h≤.518
Thus, to attain ρk,Tk ≤ 2m(1−σ2(W ))εk, we only need (1−δg)TkC1 ≤ 2m(1−σ2(W )),519
i.e., Tk = O(
1δg
log C1
2m(1−σ2(W ))
)= O
((Lgµg
+ 11−σ2(W )
)log
Lgµ(1−σ2(W ))
). �520
Based on the above lemma and Theorem 6, we can prove Corollary 7.521Proof of Corollary 7: From (34) and Lemma 17, we have522
‖ΠxK+1‖2F ≤32mεKβg
b≤ 32m
βg
2(F (x0)− F (x∗))
9(1− ρ)K+1,523
whereb≤ uses the definition of εk in Theorem 5. On the other hand, from Theorem 5, we have524
F (α(xK+1))− F (x∗) ≤ 8
(√q − ρ)2
(1− ρ)K+2(F (x0)− F (x∗)).525
To make ‖ΠxK+1‖2F ≤ O(mε2) and F (α(xK+1)) − F (x∗) ≤ O(ε), we only need to run526
Algorithm 2 for K = O(√
1 + τµ log 1
ε
)outer iterations such that527
(F (x0)− F (x∗))(1− ρ)K+1 ≤ ε2.528
Thus, the total number of inner iterations is529
K∑k=0
Tk =
√1 +
τ
µ
(log
1
ε
)(L+ τ
µ+ τ+
1
1− σ2(W )
)log
L+ τ
µ(1− σ2(W ))
≤3
√L
µ(1− σ2(W ))log
2L
µ(1− σ2(W ))log
1
ε
530
by letting τ = L(1− σ2(W ))− µ.531
This manuscript is for review purposes only.

20 H. LI, AND Z. LIN
4.3.2. Non-strongly Convex Case. When the strong-convexity is absent, we can have532the following lemma, which further leads to Theorem 8. Similar to Lemma 17, we prove a533sharper result of ρk,Tk ≤ 2mεk(1− σ2(W ))3+ξ.534
LEMMA 18. Suppose that F (x) is convex. If ρr,Tr ≤ 2mεr(1 − σ2(W ))3+ξ holds for535all r ≤ k − 1 and we initialize xk,0 = xk−1,Tk−1+1 and λk,0 = λk−1,Tk−1+1, then we only536
need Tk = O((
Lgµg
+ 11−σ2(W )
)log k
1−σ2(W )
)such that ρk,Tk ≤ 2mεk(1− σ2(W ))3+ξ.537
The proof is similar to that of [18, Proposition 12] and we omit the details. Simply, when538the strong convexity is absent, (39) and (40) also hold. But we need to bound ‖xk − x∗‖2F in539a different way. From Theorem 5, the sequence F (α(xk)) is bounded by a constant. By the540bounded level set assumption, there exists C > 0 such that ‖α(xk)− x∗‖ ≤ C. From (34),541we have ‖Πxk‖2F ≤ 16
βg(1−σ2(W ))ρk−1,Tk−1. Thus, we have542
‖xk − x∗‖2F =‖1(α(xk))T + Πxk − 1(x∗)T ‖2F≤2m‖α(xk)− x∗‖2 + 2‖Πxk‖2F
≤2mC2 +32mεk−1(1− σ2(W ))2+ξ
βg.
543
Thus, ρk,0 is bounded by constant C2 = 4m+ 40(
4Lg +8Lg
1−σ2(W )
)(2mC2 + 32m/βg) and544
we only need (1−δg)TkC2≤ 2mεk(1−σ2(W ))3+ξ , i.e., Tk =O(
1δg
log C2
2mεk(1−σ2(W ))3+ξ
)545
= O((
Lgµg
+ 11−σ2(W )
)log k
1−σ2(W )
).546
Now, we come to Corollary 9. From Theorem 5, to find an ε-optimal solution such that547
F (α(xK+1))− F (x∗) ≤ ε, we need K = O
(√τR1
ε
)outer iterations. On the other hand,548
from (34) and Lemma 18, we have549
‖ΠxK+1‖2F ≤32m(1− σ2(W ))2+ξεK
βg
a≤ 32m(1− σ2(W ))2+ξ
βgK4+2ξ
b≤ 32mε2
βgL2+ξR2+ξ1
,550
wherea≤ uses the definition εk in Theorem 5,
b≤ uses K = O
(√τR1
ε
)and τ = L(1 −551
σ2(W )). Thus, the settings of Tk and K leads to ‖ΠxK+1‖2F ≤ O(mε2). The total number552of inner iterations is553
√τε∑
k=0
Tk =
√τ
ε
(L+ τ
τ+
1
1− σ2(W )
)log
1
ε(1− σ2(W )).554
The setting of τ = L(1−σ2(W )) leads to the minimal value of√
Lε(1−σ2(W )) log 1
ε(1−σ2(W )) .555
5. Numerical Experiments. Consider the decentralized least square problem:556
minx∈Rn
m∑i=1
fi(x) with fi(x) ≡ 1
2‖ATi x− bi‖2 +
µ
2‖x‖2,(43)557
where each agent {1, · · · ,m} holds its own local function fi(x). Ai ∈ Rn×s is generated558from the uniform distribution with each entry in [0, 1] and each column of Ai is normalized to559be 1. We set s = 10, n = 500, m = 100 and bi = ATi x with some unknown x. We test the560performance of the proposed algorithms on both strongly convex problem and non-strongly561
This manuscript is for review purposes only.

REVISITING EXTRA FOR SMOOTH DISTRIBUTED OPTIMIZATION 21
0 0.5 1 1.5 2
x 104
10−2
10−1
100
101
102
103
104
# of iterations
∑m i=
1f i(∑
m i=1xi/m)−
f(x
∗)
original−theoryour−theoryoriginal−practiceour−practice
0 0.5 1 1.5 2
x 104
10−2
10−1
100
101
102
103
# of iterations
original EXTRAour EXTRARegularized EXTRA
0 0.5 1 1.5 2
x 104
10−2
10−1
100
101
102
103
104
# of iterations
original−theoryour−theoryoriginal−practiceour−practice
0 0.5 1 1.5 2
x 104
10−2
10−1
100
101
102
103
# of iterations
original EXTRAour EXTRARegularized EXTRA
(a). SC, Erdos-Renyi graph (b). NS, Erdos-Renyi graph (c). SC, Geometric graph (d). NS, Geometric graph
FIG. 1. Comparisons between different EXTRA on the Erdos-Renyi random graph (p=0.1) and the geometricgraph (d=0.3). SC means the strongly convex problem (µ = 10−6) and NS means the non-strongly convex one.
convex one. For the strongly convex case, we test on µ = 10−6 and µ = 10−8, respectively.562In general, the accelerated algorithms apply to ill-conditioned problems with large condition563numbers. For the non-strongly convex one, we let µ = 0.564
We test the performance on two kinds of network: (1), the Erdos-Renyi random graph565where each pair of nodes has a connection with the ratio of p. We test two different settings of566p: p = 0.5 and p = 0.1, which results to 1
1−σ2(W ) = 2.87 and 11−σ2(W ) = 7.74, respectively.567
(2), the geometric graph where m nodes are placed uniformly and independently in the unit568square [0, 1] and two nodes are connected if their distance is at most d. We test on d = 0.5569and d = 0.3, which leads to 1
1−σ2(W ) = 8.13 and 11−σ2(W ) = 30.02, respectively. We set570
the weight matrix as W = I+M2 for both graphes, where M is the Metropolis weight matrix571
[6]: Mi,j=
1/(1 + max{di, dj}), if (i, j) ∈ E ,0, if (i, j) /∈ E and i 6= j,1−
∑l∈NiWi,l, if i = j,
and di is the number of the i-th572
agent’s neighbors.573We first compare EXTRA analyzed in this paper with the original EXTRA [34]. For574
the strongly convex problem, [34, Remark 4] analyzed the algorithm with α = 1β = µ2
L and575
α = 1β = 1
L is suggested in practice. In our theory, we use β = L and α = 14L . In practice,576
we observe that β = L and α = 1L performs the best. Figure 1.a and Figure 1.c plot the results.577
We can see that the theoretical setting in the original EXTRA makes almost no decreasing in578the objective function values due to small step-size and our theoretical setting works much579better. On the other hand, both the original EXTRA and our analyzed one work best for β = L580and α = 1
L . For the non-strongly convex problems, [34] suggests α = 1β = 1
L in both theory581
and practice. In our theory, Lemma 3 suggests β = L√1−σ2(W )
and α = 12(L+β) . From Figure582
1.b and Figure 1.d, we observe that a larger β (i.e., a smaller step-size) makes the algorithm583slow. On the other hand, our regularized EXTRA performs as well as the original EXTRA.584
Then, we compare the proposed accelerated EXTRA (Acc-EXTRA) with the origi-585nal EXTRA [34], the accelerated distributed Nesterov gradient descent (Acc-DNGD) [27],586accelerated dual ascent (ADA) [38] and the accelerated penalty method with consensus587(APM-C) [17]. For the strongly convex problem, we set τ = L(1 − σ2(W )) − µ and588
Tk =⌈
15(1−σ2(W )) log L
µ(1−σ2(W ))
⌉for Acc-EXTRA, Tk =
⌈k√µ/L
4√
1−σ2(W )
⌉and the step-size589
as 1L for APM-C, Tk =
⌈√Lµ log L
µ
⌉and the step-size as µ for ADA, where Tk means the590
number of inner iterations at the k-th outer iteration and d·e is the top integral function. We591
This manuscript is for review purposes only.

22 H. LI, AND Z. LIN
0 0.5 1 1.5 2
x 104
10−14
10−12
10−10
10−8
10−6
10−4
10−2
100
102
104
# of communications
∑m i=
1f i(∑
m i=1xi/m)−
f(x
∗)
EXTRAAcc−DNGDAPM−CADAAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−14
10−12
10−10
10−8
10−6
10−4
10−2
100
102
104
# of gradient computations
EXTRAAcc−DNGDAPM−CAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−10
10−8
10−6
10−4
10−2
100
102
104
# of communications
Acc−DNGDEXTRAAPM−CADAAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−10
10−8
10−6
10−4
10−2
100
102
104
# of gradient computations
Acc−DNGDEXTRAAPM−CAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−12
10−10
10−8
10−6
10−4
10−2
100
102
104
# of communications
∑m i=
1f i(∑
m i=1xi/m)−
f(x
∗)
Acc−DNGDEXTRAAPM−CADAAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−12
10−10
10−8
10−6
10−4
10−2
100
102
104
# of gradient computations
Acc−DNGDEXTRAAPM−CAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−10
10−8
10−6
10−4
10−2
100
102
104
# of communications
Acc−DNGDEXTRAAPM−CADAAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−10
10−8
10−6
10−4
10−2
100
102
104
# of gradient computations
Acc−DNGDEXTRAAPM−CAcc−EXTRA
11−σ2(W )
= 2.87 11−σ2(W )
= 2.87 11−σ2(W )
= 7.74 11−σ2(W )
= 7.74
FIG. 2. Comparisons on the strongly convex problem with the Erdos-Renyi random graph. p = 0.5 for the lefttwo plots and p = 0.1 for the right two. µ = 10−6 for the top four plots and µ = 10−8 for the bottom four.
set the step-size as 1L for EXTRA and tune the best step-size for Acc-DNGD with different592
graphs and different µ. All the compared algorithms start from x(i) = 0,∀i.593The numerical results are illustrated in Figures 2 and 3. The computation cost of ADA594
is high and it has almost no visible decreasing in the first 20, 000 gradient computations [17,595Figure 2]. Thus, we do not paint it in the second and forth plots of Figures 2-5. We can see that596Acc-EXTRA performs better than the original EXTRA on both the Erdos-Renyi random graph597and the geometric graph. We also observe that Acc-EXTRA is superior to ADA and APM-C598on the graphes with small µ and 1
1−σ2(W ) . The performance of Acc-EXTRA degenerates when599
µ and 11−σ2(W ) become larger. When preparing the experiments, we observe that Acc-EXTRA600
applies to ill-conditioned problems with large condition numbers for strongly convex problems.601In this case, Acc-EXTRA runs with a certain number of outer iterations and the acceleration602takes effect.603
For the non-strongly convex problem (µ = 0), we set τ = L(1 − σ2(W )) and Tk =604 ⌈1
2(1−σ2(W )) log k+11−σ2(W )
⌉for Acc-EXTRA, Tk =
⌈log(k+1)
5√
1−σ2(W )
⌉and the step-size as 1
L for605
APM-C. We tune the best step-size as 1L and 0.2
L for EXTRA and Acc-DNGD, respectively.606For ADA, we add a small regularizer of ε
2‖x‖2 to each fi(x) and solve a regularized strongly607
covnex problem with ε = 10−7. The numerical results are illustrated in Figures 4 and 5. We608observe that Acc-EXTRA also outperforms the original EXTRA and Acc-EXTRA is superior609with small 1
1−σ2(W ) . Moreover, at the first 10000 iterations, the advantage of Acc-EXTRA is610
not obvious and it performs better at the last 5000 iterations. Thus, Acc-EXTRA suits for the611applications requiring a high precision and the well-connected networks with small 1
1−σ2(W ) .612
At last, we report two results in Figure 6 that Acc-EXTRA does not perform well, where613the left two plots are for the strongly convex problem and the right two are for the non-strongly614convex one. Comparing the left two plots in Figure 6 with the left and top two in Figure 3,615we can see that Acc-EXTRA is inferior to ADA and APM-C in cases with a larger µ, i.e., a616
This manuscript is for review purposes only.

REVISITING EXTRA FOR SMOOTH DISTRIBUTED OPTIMIZATION 23
0 0.5 1 1.5 2
x 104
10−10
10−8
10−6
10−4
10−2
100
102
104
# of communications
∑m i=
1f i(∑
m i=1xi/m)−
f(x
∗)
APM−CAcc−DNGDEXTRAADAAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−10
10−8
10−6
10−4
10−2
100
102
104
# of gradient computations
Acc−DNGDEXTRAAPM−CAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−8
10−6
10−4
10−2
100
102
104
# of communications
APM−CAcc−DNGDEXTRAADAAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−8
10−6
10−4
10−2
100
102
104
# of gradient computations
Acc−DNGDEXTRAAPM−CAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−14
10−12
10−10
10−8
10−6
10−4
10−2
100
102
104
# of communications
∑m i=
1f i(∑
m i=1xi/m)−
f(x
∗)
Acc−DNGDAPM−CEXTRAADAAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−14
10−12
10−10
10−8
10−6
10−4
10−2
100
102
104
# of gradient computations
Acc−DNGDEXTRAAPM−CAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−10
10−8
10−6
10−4
10−2
100
102
104
# of communications
Acc−DNGDAPM−CEXTRAADAAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−10
10−8
10−6
10−4
10−2
100
102
104
# of gradient computations
Acc−DNGDEXTRAAPM−CAcc−EXTRA
11−σ2(W )
= 8.13 11−σ2(W )
= 8.13 11−σ2(W )
= 30.02 11−σ2(W )
= 30.02
FIG. 3. Comparisons on the strongly convex problem with the geometric graph. d = 0.5 for the left two plotsand d = 0.3 for the right two. µ = 10−6 for the top four plots and µ = 10−8 for the bottom four.
0 0.5 1 1.5 2
x 104
10−12
10−10
10−8
10−6
10−4
10−2
100
102
104
# of communications
∑m i=
1f i(∑
m i=1xi/m)−
f(x
∗)
EXTRAAPM−CAcc−DNGDADAAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−12
10−10
10−8
10−6
10−4
10−2
100
102
104
# of gradient computations
EXTRAAcc−DNGDAPM−CAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−8
10−6
10−4
10−2
100
102
104
# of communications
EXTRAAPM−CAcc−DNGDADAAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−8
10−6
10−4
10−2
100
102
104
# of gradient computations
EXTRAAcc−DNGDAPM−CAcc−EXTRA
11−σ2(W )
= 2.87 11−σ2(W )
= 2.87 11−σ2(W )
= 7.74 11−σ2(W )
= 7.74
FIG. 4. Comparisons on the non-strongly convex problem with the Erdos-Renyi random graph. p = 0.5 for theleft two plots and p = 0.1 for the right two plots.
0 0.5 1 1.5 2
x 104
10−10
10−8
10−6
10−4
10−2
100
102
104
# of communications
∑m i=
1f i(∑
m i=1xi/m)−
f(x
∗)
EXTRAAPM−CAcc−DNGDADAAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−10
10−8
10−6
10−4
10−2
100
102
104
# of gradient computations
EXTRAAcc−DNGDAPM−CAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−8
10−6
10−4
10−2
100
102
104
# of communications
EXTRAAPM−CAcc−DNGDADAAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−8
10−6
10−4
10−2
100
102
104
# of gradient computations
EXTRAAcc−DNGDAcc−EXTRAAPM−C
11−σ2(W )
= 8.13 11−σ2(W )
= 8.13 11−σ2(W )
= 30.02 11−σ2(W )
= 30.02
FIG. 5. Comparisons on the non-strongly convex problem with the geometric graph. d = 0.5 for the left twoplots and d = 0.3 for the right two plots.
This manuscript is for review purposes only.

24 H. LI, AND Z. LIN
0 0.5 1 1.5 2
x 104
10−12
10−10
10−8
10−6
10−4
10−2
100
102
104
# of communications
∑m i=
1f i(∑
m i=1xi/m)−
f(x
∗)
EXTRAAPM−CAcc−DNGDAcc−EXTRAADA
0 0.5 1 1.5 2
x 104
10−20
10−15
10−10
10−5
100
105
# of gradient computations
EXTRAAcc−DNGDAcc−EXTRAAPM−C
0 0.5 1 1.5 2
x 104
10−3
10−2
10−1
100
101
102
103
104
# of communications
EXTRAAPM−CAcc−DNGDADAAcc−EXTRA
0 0.5 1 1.5 2
x 104
10−8
10−6
10−4
10−2
100
102
104
# of gradient computations
EXTRAAcc−DNGDAcc−EXTRAAPM−C
FIG. 6. Further comparisons on the geometric graph. d = 0.5 and µ = 10−5 for the left two plots andd = 0.15 and µ = 0 for the right two plots.
smaller condition number for strongly convex problems. On the other hand, comparing the617right two in Figure 6 with the four in Figure 5, we observe that ADA and APM-C outperforms618Acc-EXTRA in cases with a larger 1
1−σ2(W ) (it equals 268.67 when d = 0.15) for non-strongly619
convex problems. These observations further support the above conclusions.620
6. Conclusion. In this paper, we first give a sharp analysis on the original EXTRA621with improved complexities, which depends on the sum of L
µ (or Lε ) and 1
1−σ2(W ) , rather622
than their product. Then, we use the Catalyst framework to accelerate it and obtain the623near optimal communication complexities and competitive computation complexities. Our624communication complexities of the proposed accelerated EXTRA are only worse by the factors625
of(
log Lµ(1−σ2(W ))
)and
(log 1
ε
)form the lower bounds for strongly convex and non-strongly626
convex problems, respectively.627
REFERENCES628
[1] B. Recht abd C. Re, S. Wright, and F. Niu. Hogwild: A lock-free approach to parallelizing stochastic gradietn629descent. In Advances in Neural Information Processing Systems (NIPS), pages 693–701, 2011.630
[2] A. Agarwal and J. Duchi. Distributed delayed stochastic optimization. In Advances in Neural Information631Processing Systems (NIPS), pages 873–881, 2011.632
[3] Z. Allen-Zhu and E. Hazan. Optimal black-box reductions between optimization objectives. In Advances in633Neural Information Processing Systems (NIPS), pages 1614–1622, 2016.634
[4] N. Aybat, Z. Wang, T. Lin, and S. Ma. Distributed linearized alternating direction method of multipliers for635composite convex consensus optimization. IEEE Transaction on Automatic Control, 63(1):50–20, 2018.636
[5] D. Bertsekas. Distributed asynchromous computation of fixed points. Mathmatical Programming, 27:107–120,6371983.638
[6] S. Boyd, P. Diaconis, and L. Xiao. Fastest mixing markov chain on a graph. SIAM Review, 46(4):667–689,6392004.640
[7] A. Chen and A. Ozdaglar. A fast distributed proximal-gradient method. In Allerton Conference on Communi-641cation, Control, and Computing, pages 601–608, 2012.642
[8] O. Dekel, R. Gilad-Bachrach, O. Shamir, and L. Xiao. Optimal distributed online prediction using mini-batches.643Journal of Machine Learning Research, 13(6):165–202, 2012.644
[9] M. Duarte and Y. Hu. Vehicle classification in distributed sensor networks. Journal of Parallel and Distributed645Computing, 64(7):826–838, 2014.646
[10] P. Forero, A. Cano, and G. Giannakis. Consensus-based distributed support vector machines. Journal of647Machine Learning Research, 59(55):1663–1707, 2010.648
[11] L. Gan, U. Topcu, and S. Low. Optimal decentralized protocol for electric vehicle charging. IEEE Transaction649on Power Systems, 28(2):940–951, 2013.650
[12] M. Hong, D. Hajinezhad, and M. Zhao. Prox-PDA: The proximal primal-dual algorithm for fast distributed651nonconvex optimization and learning over networks. In International Conference on Machine Learning652(ICML), pages 1529–1538, 2017.653
[13] F. Iutzeler, P. Bianchi, P. Ciblat, and W. Hachem. Explicit convergence rate of a distributed alternating direction654method of multipliers. IEEE Transaction on Automatic Control, 61(4):892–904, 2016.655
This manuscript is for review purposes only.

REVISITING EXTRA FOR SMOOTH DISTRIBUTED OPTIMIZATION 25
[14] D. Jakovetic. A unification and generatliztion of exact distributed first order methods. IEEE Transactions on656Signal and Information Processing over Networks, 5(1):31–46, 2019.657
[15] D. Jakovetic, J. Xavier, and J. Moura. Fast distributed gradient methods. IEEE Transaction on Automatic658Control, 59(5):1131–1146, 2014.659
[16] G. Lan, S. Lee, and Y. Zhou. Communication-efficient algorithms for decentralized and stochastic optimization.660Mathematical Programming, 180(1):237–284, 2020.661
[17] H. Li, C. Fang, W. Yin, and Z. Lin. A sharp convergence rate analysis for distributed accelerated gradient662methods. arxiv:1810.01053, 2018.663
[18] H. Lin, J. Mairal, and Z. Harchaoui. Catalyst acceleration for first-order convex optimization: from theory to664practice. Journal of Machine Learning Research, 18(212):1–54, 2018.665
[19] A. Makhdoumi and A. Ozdaglar. Convergence rate of distributed ADMM over networks. IEEE Transaction on666Automatic Control, 62(10):5082–5095, 2017.667
[20] A. Mokhtari and A. Ribeiro. DSA: Decenrtalized double stochastic averaging gradient algorithm. Journal of668Machine Learning Research, 17(61):1–35, 2016.669
[21] A. Nedic. Asynchronous broadcast-based convex optimization over a network. IEEE Transaction on Automatic670Control, 56(6):1337–1351, 2011.671
[22] A. Nedic, A. Olshevsky, and M. Rabbat. Network topology and communication-computation tradeoffs in672decentralized optimization. Proceedings of the IEEE, 106(5):953–976, 2018.673
[23] A. Nedic, A. Olshevsky, and W. Shi. Achieving geometric convergence for distributed optimization over674time-varying graphs. SIAM Journal of Optimization, 27(4):2597–2633, 2017.675
[24] A. Nedic and A. Ozdaglar. Distributed subgradient methods for multi-agent optimization. IEEE Transaction676on Automatic Control, 54(1):48–61, 2009.677
[25] Y. Nesterov. Introductory lectures on convex optimization: A basic course, volume 87. Springer Science &678Business Media, 2013.679
[26] Y. Nesterov. Introductory lectures on convex optimization. a basic course. Kluwer, Boston, 2014.680[27] G. Qu and N. Li. Accelerated distributed nesterov gradient descent. arxiv:1705.07176, 2017.681[28] G. Qu and N. Li. Harnessing smoothness to accelerate distributed optimization. IEEE Transactions on Control682
of Network Systems, 5(3):1245–1260, 2018.683[29] S. Ram, A. Nedic, and V. Veeravalli. Distributed stochastic subgradient projection algorithms for convex684
optimization. Journal of Optimization Theory and Applications, 147(3):516–545, 2010.685[30] K. Scaman, F. Bach, S. Bubeck, Y. Lee, and L. Massoulie. Optimal algorithms for smooth and strongly convex686
distributed optimization in networks. In International Conference on Machine Learning (ICML), pages6873027–3036, 2017.688
[31] K. Scaman, F. Bach, S. Bubeck, Y. Lee, and L. Massoulie. Optimal algorithms for non-smooth distributed689optimization in networks. In Advances in Neural Information Processing Systems (NIPS), pages 2740–6902749, 2018.691
[32] K. Scaman, F. Bach, S. Bubeck, Y. Lee, and L. Massoulie. Optimal convergence rates for convex distributed692optimization in networks. Journal of Machine Learning Research, 20(159):1–31, 2019.693
[33] M. Schmidt, N. Le Roux, and F. Bach. Convergence rates of inexact proximal-gradient methods for convex694optimization. In Advances in Neural Information Processing Systems (NIPS), pages 1458–1466, 2011.695
[34] W. Shi, Q. Ling, G. Wu, and W. Yin. EXREA: An exact first-order algorithm for decentralized consensus696optimization. SIAM Journal on Optimization, 25(2):944–966, 2015.697
[35] W. Shi, Q. Ling, G. Wu, and W. Yin. A proximal gradient algorithm for decentralized composite optimization.698IEEE Transaction on Signal Processing, 63(23):6013–6023, 2015.699
[36] H. Terelius, U. Topcu, and R. Murray. Decentralized multi-agent optimization via dual decomposition. IFAC700proceedings volumes, 44(1):11245–11251, 2011.701
[37] J. Tsitsiklis, D. Bertsekas, and M. Athans. Distributed asynchronous deterministic and stochastic gradient702optimization algorithms. IEEE Transaction on Automatic Control, 31(9):803–812, 1986.703
[38] C. Uribe, S. Lee, A. Gasnikov, and A. Nedic. A dual approach for optimal algorithms in distributed optimization704over networks. arxiv:1809.00710, 2018.705
[39] J. Xu, S. Zhu, Y. Soh, and L. Xie. Augmented distributed gradient methods for multi-agent optimization under706uncoordinated constant stepsizes. In IEEE Conference on Decision and Control (CDC), pages 2055–2060,7072015.708
[40] K. Yuan, Q. Ling, and W. Yin. On the convergence of decentralized gradient descent. SIAM Journal on709Optimization, 26(3):1835–1854, 2016.710
This manuscript is for review purposes only.





![Graduated Non-Convexity by Smoothness FocusingRegularization is a method of reformulating ill-posed inverse problems as well-posed problems as done by Tikhonov and Arsenin [1]. This](https://static.fdocuments.net/doc/165x107/5f6f4a2995bc3443992f5564/graduated-non-convexity-by-smoothness-regularization-is-a-method-of-reformulating.jpg)





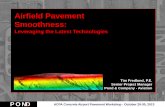






![Uniform convexity and smoothness, and their applications ...sohta/papers/Funi.pdf · the geometry of Banach spaces. We refer to [BCS], [Eg], [Sh1], [Sh2], [Sh3] and [WX] for known](https://static.fdocuments.net/doc/165x107/5edb03b009ac2c67fa68ab72/uniform-convexity-and-smoothness-and-their-applications-sohtapapersfunipdf.jpg)