Research Article Terminal Sliding Mode Control of Mobile ... · Research Article Terminal Sliding...
9
Research Article Terminal Sliding Mode Control of Mobile Wheeled Inverted Pendulum System with Nonlinear Disturbance Observer SongHyok Ri, 1,2 Jian Huang, 1 Yongji Wang, 1 MyongHo Kim, 2 and Sonchol An 2 1 Key Laboratory of Ministry of Education for Image Processing and Intelligent Control, School of Automation, Huazhong University of Science and Technology, No. 1037, Luoyu Road, Hongshan District, Wuhan, Hubei 430074, China 2 Faculty of Control Science, University of Science and Technology, Unjong District, Pyongyang 999093, Democratic People’s Republic of Korea Correspondence should be addressed to Jian Huang; huang [email protected] Received 6 June 2014; Accepted 30 August 2014; Published 29 September 2014 Academic Editor: Kang Li Copyright © 2014 SongHyok Ri et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. A terminal sliding mode controller with nonlinear disturbance observer is investigated to control mobile wheeled inverted pendulum system. In order to eliminate the main drawback of the sliding mode control, “chattering” phenomenon, and for compensation of the model uncertainties and external disturbance, we designed a nonlinear disturbance observer of the mobile wheeled inverted pendulum system. Based on the nonlinear disturbance observer, a terminal sliding mode controller is also proposed. e stability of the closed-loop mobile wheeled inverted pendulum system is proved by Lyapunov theorem. Simulation results show that the terminal sliding mode controller with nonlinear disturbance observer can eliminate the “chattering” phenomenon, improve the control precision, and suppress the effects of external disturbance and model uncertainties effectively. 1. Introduction Mobile wheeled inverted pendulum- (MWIP-) based robots are able to provide effective physical assistance to humans in various activities such as delivery and touring. Recently, many robotic systems are designed based on MWIP model, such as Segway [1], JOE [2], UW-Car [3], and PMP [4]. However, the control of the inherent unstable MWIP system is a challenge. First of all, the dynamics of MWIP system is underactuated; that is, the number of the control inputs is less than the number of the degrees of freedom to be stabilized. In addition, MWIP systems are different from either the conventional cart and pendulum systems or the conventional nonholonomic systems. erefore, many available control design approaches are not applicable to the MWIP systems. In the past several years many approaches have been applied in the control of MWIP, including the linear [5] or feedback linearization [6] methods, fuzzy control methods [7], neural network-based methods [8], adaptive control, and optimized model reference adaptive control [9]. e sliding mode control (SMC) approach seems an appropriate control method to deal with uncertain MWIP systems because SMC is less sensitive to model uncertainty and noise disturbances. Sankaranarayanan and Mahindrakar [10] proposed a sliding mode control algorithm to robustly stabilize a class of underactuated mechanical systems that are not linearly controllable and violate Brockett’s necessary con- dition for smooth asymptotic stabilization of the equilibrium, with parametric uncertainties. Park et al. [11] proposed an adaptive neural SMC method for trajectory tracking control of nonholonomic wheeled mobile robots with model uncertainties and external distur- bances. Huang et al. [12] proposed a velocity control method for the MWIP based on sliding mode and a novel sliding surface. Terminal sliding mode control (TSMC) of finite-time convergence is a variable structure control method whose formation and development are based on the introduction of a nonlinear function into sliding hyperplane. Compared to the conventional SMC, TSMC provides faster finite-time convergence and higher control precision. So far, the research Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2014, Article ID 284216, 8 pages http://dx.doi.org/10.1155/2014/284216
Transcript of Research Article Terminal Sliding Mode Control of Mobile ... · Research Article Terminal Sliding...

Research ArticleTerminal Sliding Mode Control of Mobile Wheeled InvertedPendulum System with Nonlinear Disturbance Observer
SongHyok Ri12 Jian Huang1 Yongji Wang1 MyongHo Kim2 and Sonchol An2
1 Key Laboratory of Ministry of Education for Image Processing and Intelligent Control School of AutomationHuazhong University of Science and Technology No 1037 Luoyu Road Hongshan District Wuhan Hubei 430074 China
2 Faculty of Control Science University of Science and Technology Unjong DistrictPyongyang 999093 Democratic Peoplersquos Republic of Korea
Correspondence should be addressed to Jian Huang huang janmailhusteducn
Received 6 June 2014 Accepted 30 August 2014 Published 29 September 2014
Academic Editor Kang Li
Copyright copy 2014 SongHyok Ri et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
A terminal sliding mode controller with nonlinear disturbance observer is investigated to control mobile wheeled invertedpendulum system In order to eliminate the main drawback of the sliding mode control ldquochatteringrdquo phenomenon and forcompensation of the model uncertainties and external disturbance we designed a nonlinear disturbance observer of the mobilewheeled inverted pendulum system Based on the nonlinear disturbance observer a terminal sliding mode controller is alsoproposed The stability of the closed-loop mobile wheeled inverted pendulum system is proved by Lyapunov theorem Simulationresults show that the terminal sliding mode controller with nonlinear disturbance observer can eliminate the ldquochatteringrdquophenomenon improve the control precision and suppress the effects of external disturbance and model uncertainties effectively
1 Introduction
Mobile wheeled inverted pendulum- (MWIP-) based robotsare able to provide effective physical assistance to humans invarious activities such as delivery and touring Recentlymanyrobotic systems are designed based onMWIPmodel such asSegway [1] JOE [2] UW-Car [3] and PMP [4]
However the control of the inherent unstable MWIPsystem is a challenge First of all the dynamics of MWIPsystem is underactuated that is the number of the controlinputs is less than the number of the degrees of freedomto be stabilized In addition MWIP systems are differentfrom either the conventional cart and pendulum systems orthe conventional nonholonomic systems Therefore manyavailable control design approaches are not applicable to theMWIP systems
In the past several years many approaches have beenapplied in the control of MWIP including the linear [5] orfeedback linearization [6] methods fuzzy control methods[7] neural network-basedmethods [8] adaptive control andoptimized model reference adaptive control [9]
The sliding mode control (SMC) approach seems anappropriate control method to deal with uncertain MWIPsystems because SMC is less sensitive to model uncertaintyand noise disturbances Sankaranarayanan andMahindrakar[10] proposed a sliding mode control algorithm to robustlystabilize a class of underactuated mechanical systems that arenot linearly controllable and violate Brockettrsquos necessary con-dition for smooth asymptotic stabilization of the equilibriumwith parametric uncertainties
Park et al [11] proposed an adaptive neural SMCmethodfor trajectory tracking control of nonholonomic wheeledmobile robots with model uncertainties and external distur-bances Huang et al [12] proposed a velocity control methodfor the MWIP based on sliding mode and a novel slidingsurface
Terminal sliding mode control (TSMC) of finite-timeconvergence is a variable structure control method whoseformation and development are based on the introductionof a nonlinear function into sliding hyperplane Comparedto the conventional SMC TSMC provides faster finite-timeconvergence and higher control precision So far the research
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014 Article ID 284216 8 pageshttpdxdoiorg1011552014284216
2 Mathematical Problems in Engineering
of control methods of the terminal sliding mode controlcan be mainly divided into two types that is fractionalexponent method such as 119904 = 119890 + 119890
119901119902 [13] and cubicpolynomials [14] Bayramoglu and Komurcugil [15 16] pro-posed a nonsingular decoupled terminal slidingmode control(NDTSMC)method for a class of underactuated fourth-ordernonlinear systems This control method is relatively simpleHowever these references do not involve how to choose twointermediate parameters 119911119906 and Φ119911 which brings difficultyof their practical applications Huang et al [3] for a novelnarrow vehicle based on an MWIP system and a movableseat called UW-Car proposed two terminal sliding modecontrollers to control the velocity and braking
Although TSMC controller is less sensitive to parametervariations and noise disturbances its robustness is normallyobtained by increasing the switch gain 119896 Note that a bigger 119896also brings chatter to the system which is the main drawbackof the SMC
Disturbance observer might be a candidate solution forthe problem It is found that using a disturbance observercan further improve the robustness of controller A nonlineardisturbance observer was proposed by Mohammadi et al[17] to manage the disturbance of nonlinear system whichis applied for a 4-degree-of-freedom SCARA manipulatorChen [18] proposed a nonlinear disturbance observer to dealwith the disturbance of nonlinear system which is appliedto tracking control of pneumatic artificial muscle actuator byusing DSC control method [19] Wei et al [20] for uncertainstructural systems proposed a new type of composite controlscheme of disturbance-observer-based control and terminalsliding mode control (TSMC) Yang et al [21] for systemswith mismatched uncertainties proposed a sliding modecontrol approach by using a novel sliding surface based ona disturbance observer
However most of the aforementioned studies rarelydiscussed terminal sliding mode control with disturbanceobserver for an underactuated system such as the MWIP
In this paper we proposed a terminal sliding modecontrollerwith nonlinear disturbance observer (TSMCNDO)for the balance control of an MWIP system Comparedwith the conventional sliding mode controller in [14] largerstability region very higher control precision and smallerchattering can be achieved by applying the TSMCNDOstrategy
The rest of this paper is organized as follows The MWIPsystem formulation and a nonlinear disturbance observer arediscussed in Section 2 The terminal sliding mode controlwith nonlinear disturbance observer (TSMCNDO) and sta-bility analysis are discussed in Section 3 Section 4 presentssome MATLAB simulation results and the paper finally endsby the conclusion in Section 5
In the rest of this paper (sdot) denotes a nominal value of (sdot)
2 System Formulation
21 MWIP System Dynamic Model The MWIP system is aone-dimensional inverted pendulum that rotates about thewheelsrsquo axles Hence inclination and translational motion of
Table 1 Notations for MWIP parameters
Parameter Description119898119887119898119908 Masses of the body and the wheel119868119887 119868119908 Moments of inertia of the body and the wheel
119897Length between the wheel axle and the center ofgravity of the body
119903 Radius of the wheel119863119887 Viscous resistance in the driving system119863119908 Viscous resistance of the ground119906 Rotation torque generated by the wheel motor
120579b
mb Ib
(xb yb)
120579w
r
u
y
x
mw Iw
(xw yw)
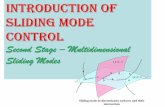
Figure 1 Mobile wheeled inverted pendulum (MWIP) systemmodel
the body determined the whole motion on a plane Figure 1shows the structure of an MWIP system where 120579119887 and 120579119908
are the inclination angle of the body and the wheelrsquos rotationangle respectively To describe the parameters of the MWIPsystem some notations should be clarified first (see alsoFigure 1) which are shown in Table 1
Lagrangersquosmotion equation is used to analyze the dynam-ics of this system which leads to a second-order underactu-ated model given by Huang et al [12] Consider
11989811120579119908 + 11989812 cos (120579119887)
120579119887
= 119906 minus (119863119908 + 119863119887)120579119908 + 119863119887
120579119887 + 11989812
1205792
119887sin (120579119887)
11989812 cos (120579119887) 120579119908 + 11989822
120579119887
= minus119906 minus 119863119887 (120579119887 minus
120579119908) + 119866119887 sin (120579119887)
(1)
where parameters11989811 11989812 11989822 and 119866119887 satisfy
11989811 = (119898119887 + 119898119908) 1199032+ 119868119908
11989812 = 119898119887119897119903
Mathematical Problems in Engineering 3
11989822 = 1198981198871198972+ 119868119887
119866119887 = 119898119887119892119897
(2)
Add the first equation of (1) to the second one and considerexternal disturbance we have
11989811120579119908 + 11989812 cos (120579119887)
120579119887
= 119906 minus (119863119908 + 119863119887)120579119908 + 119863119887
120579119887 + 11989812
1205792
119887sin (120579119887) + 120591ex
(11989811 + 11989812 cos (120579119887)) 120579119908 + (11989822 + 11989812 cos (120579119887))
120579119887
= minus119863119908120579119908 + 11989812
1205792
119887sin (120579119887) + 119866119887 sin (120579119887)
(3)
where 120591ex are used to denote external disturbance
22 Nonlinear Disturbance Observer Design In order toimprove the robustness and control precision of the MWIPsystem it is necessary to design a nonlinear disturbanceobserver estimating model uncertainties and external distur-bance This subsection illustrates the design procedure of anonlinear disturbance observer in the MWIP system
For the nonlinear underactuated system with distur-bances in order to simplify the denotation we can rewrite(3) as
119872(119902) 119902 + 119873 (119902 119902) + 119865 ( 119902) = 120591 + 120591ext (4)
where
119902 = [1199021 1199022]119879= [120579119908 120579119887]
119879
119872 (119902) = [
11989811 11989812 cos (1199022)11989811 + 11989812 cos (1199022) 11989822 + 11989812 cos (1199022)
]
119873 (119902 119902) = [
minus11989812 1199022
2sin (1199022)
minus119866119887 sin (1199022) minus 11989812 1199022
2sin (1199022)
]
119865 ( 119902) = [
(119863119908 + 119863119887) 1199021 minus 119863119887 1199022
119863119908 1199021
]
120591 = [
119906
0] 120591ext = [
120591ex0]
(5)
Then we can get
119872(119902) = (119902) + Δ119872(119902)
119873 (119902 119902) = (119902 119902) + Δ119873 (119902 119902)
(6)
The lumped disturbance vector 120591119889 is defined as
120591119889 = [1205911198891 1205911198892]119879= 120591ext minus Δ119872(119902) 119902 minus Δ119873 (119902 119902) minus 119865 ( 119902) (7)
Therefore the effect of all modelling uncertainties and exter-nal disturbance is lumped into a single disturbance vector 120591119889From (4) it is seen that
(119902) 119902 + (119902 119902) = 120591 + 120591119889 (8)
To estimate the lumped disturbance 120591119889 the nonlinear distur-bance observer is designed as follows
119889 = minus119871120591119889 + 119871 ( (119902) 119902 + (119902 119902) minus 120591) (9)
Define 120591119889 = 120591119889minus120591119889 as the disturbance tracking error and using(9) it is observed that
119889 = 119871120591119889
(10)
or equivalently119889 = 120591119889 minus 119871120591119889
(11)
In general there is no prior information about the derivativeof the disturbance 120591119889 When the disturbance varies slowlyrelative to the observer dynamics it is reasonable to supposethat 120591119889 = 0 Then we get
119889 = minus
119889 = minus119871120591119889
(12)
Let us define an auxiliary variable 119911 = [1199111 1199112]119879= 120591119889minus119901(119902 119902)
where (119889119889119905)119901(119902 119902) = 119871(119902 119902)(119902) 119902 Substitute it into (9) theobserver can be designed as
= 119871 (119902 119902) [ (119902 119902) minus 120591 minus 119901 (119902 119902) minus 119911]
120591119889 = 119911 + 119901 (119902 119902)
(13)
where observer gain matrix 119871(119902 119902) and vector 119901(119902 119902) satisfy
119871 (119902) = 119883minus1(119902)
119901 ( 119902) = 119883 119902
(14)
119883 is a constant invertible matrix that is
119883 = [
1198881 1198882
1198883 1198884
] 119888119894 ge 0 119894 = 1 2 3 4 (15)
Substituting (14) and (15) into (13) and using (4) we have
= [
1
2
]
= 119860minus1[
1198881 1198882
1198883 1198884
] [
22 + 12 cos (120579119887) minus12 cos (120579119887)minus11 minus 12 cos (120579119887) 11
]
sdot [
minus121205792
119887sin (120579119887)
minus119866119887 sin (120579119887) minus 121205792
119887sin (120579119887)
]
minus [
119906
0] minus [
1198881 1198882
1198883 1198884
] [
120579119908
120579119887
] minus [
1199111
1199112
]
= 119860minus1[
11988811198631 minus 11988821198632 119888211 minus 119888112 cos (120579119887)11988831198631 minus 11988841198632 119888411 minus 119888312 cos (120579119887)
]
sdot [
minus121205792
119887sin (120579119887) minus 119906 minus 1198881
120579119908 minus 1198882
120579119887 minus 1199111
minus119866119887 sin (120579119887) minus 121205792
119887sin (120579119887) minus 1198883
120579119908 minus 1198884
120579119887 minus 1199112
]
120591119889 = [
1205911198891
1205911198892
] = [
1199111
1199112
] + [
1198881 1198882
1198883 1198884
] [
120579119908
120579119887
]
(16)
4 Mathematical Problems in Engineering
where1198631 = 22 + 12 cos (120579119887)
1198632 = 11 + 12 cos (120579119887)
119860 = det ( (119902)) = 1122 minus (12 cos (120579119887))2gt 0
(17)
Therefore the disturbance observer can be designed asfollows1
= 119860minus1[ (11988821198632 minus 11988811198631)
sdot (121205792
119887sin (120579119887) + 119906 + 1198881
120579119908 + 1198882
120579119887 + 1199111)
minus (119888211 minus 119888112 cos (120579119887))
times (119866119887 sin (120579119887)+ 121205792
119887sin (120579119887) + 1198883
120579119908 + 1198884
120579119887 + 1199112)]
2
= 119860minus1[ (11988841198632 minus 11988831198631)
sdot (121205792
119887sin (120579119887) + 119906 + 1198881
120579119908 + 1198882
120579119887 + 1199111)
minus (119888411 minus 119888312 cos (120579119887))
times (119866119887 sin (120579119887)+ 121205792
119887sin (120579119887) + 1198883
120579119908 + 1198884
120579119887 + 1199112)]
1205911198891 = 1199111 + 1198881120579119908 + 1198882
120579119887
1205911198892 = 1199112 + 1198883120579119908 + 1198884
120579119887
(18)
3 Controller Design
TheMWIP system model (3) can be rewritten as
11120579119908 + 12 cos (120579119887)
120579119887 = 119906 + 121205792
119887sin (120579119887) + 1205911198891
(11 + 12 cos (120579119887)) 120579119908 + (22 + 12 cos (120579119887))
120579119887
= 121205792
119887sin (120579119887) + 119866119887 sin (120579119887) + 1205911198892
(19)
From the two equations of (19) we have
120579119887 = 119860
minus1[11119866119887 sin (120579119887) minus
2
121205792
119887sin (120579119887) cos (120579119887)]
minus 119860minus1(11 + 12 cos (120579119887)) 119906
+ 119860minus1[111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
(20)
According to the TSMCmethod proposed in [14] the slidingsurface is defined as follows
s (119905) = e (119905) + Ce (119905) minus w (119905) (21)
where e(119905) = x(119905)minusxd(119905) and xd(119905) is the reference value And
C = diag (1198881 1198882 119888119898) 119888119894 gt 0
w (119905) = k (119905) + Ck (119905) (22)
The TSMC method is applied to the subsystem (20) Thedesired inclination angle 120579
lowast
119887and its rate of change
120579lowast
119887are
expected to be zero Let us define the following slidingsurfaces
119878 (119905) =120579119887 (119905) + 119888120579119887 (119905) minus V (119905) minus 119888V (119905) (23)
where 119888 is a positive constantThe augmenting function V(119905) isdesigned as cubic polynomials that guarantee Assumption 1in [14] holds
Assumption 1 The tracking errors of the nonlinear distur-bance observer are bounded and satisfy
10038161003816100381610038161205911198891
1003816100381610038161003816le 1198891
10038161003816100381610038161205911198892
1003816100381610038161003816le 1198892 (24)
where 1198891 and 1198892 are known bounds
Theorem 2 The sliding surfaces (23) will be achieved whilethe inclination angle 120579119887 converges to zero in finite time if thefollowing control law is applied to the subsystem (20)
119906 = (11 + 12 cos (120579119887))minus1
times [11119866119887 sin (120579119887) minus 2
121205792
119887sin (120579119887) cos (120579119887) + 111205911198892
minus (11 + 12 cos (120579119887)) 1205911198891
+119860 (119888120579119887 minus V minus 119888V) + 119896 sgn (119878)]
(25)
where
119896 = 120574 + [111198892 + (11 + 12 cos (120579119887)) 1198891] 120574 gt 0 (26)
Proof Choose the following Lyapunov function candidate
119881 =
1
2
1198782 (27)
Differentiating (27) along the controlled system (20) yields
= 119878 119878 = 119878 [120579119887 + 119888
120579119887 minus V minus 119888V]
= 119878 [119860minus1(11119866119887 sin (120579119887) minus
2
121205792
119887sin (120579119887) cos (120579119887))
minus 119860minus1(11 + 12 cos (120579119887)) 119906
+ 119860minus1[111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
+ 119888120579119887 minus V minus 119888V]
(28)
Substituting (25) into (28)
= 119878 minus119860minus1119896 sgn (119878)
+119860minus1[111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
= minus119860minus1119878 119896 sgn (119878) minus [111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
= minus 119896119860minus1|119878| + 119860
minus1119878 [111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
le minus 119896119860minus1|119878| + 119860
minus1|119878|
1003816100381610038161003816111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891
1003816100381610038161003816
Mathematical Problems in Engineering 5
Table 2 Physical parameters of MWIP system
Parameter Value Parameter Value119898119908 290 (Kg) 119868119908 06 (Kgsdotm2)119903 0254 (m) 119887 2106 (Kg)119868119887 550 (Kgsdotm2)
119897 0267 (m)119898119887 3106 (Kg) 119868119887 650 (Kgsdotm2)119897 0317 (m) 119863119887 01 (Nsdotsm)119863119908 40 (Nsdotsm)
le minus 119896119860minus1|119878| + 119860
minus1|119878| [
1003816100381610038161003816111205911198892
1003816100381610038161003816+1003816100381610038161003816(11 + 12 cos (120579119887)) 1205911198891
1003816100381610038161003816]
le minus 119896119860minus1|119878| + 119860
minus1|119878| [111198892 + (11 + 12 cos (120579119887)) 1198891]
le minus119860minus1|119878| (119896 minus [111198892 + (11 + 12 cos (120579119887)) 1198891])
= minus 120574119860minus1|119878| lt 0
(29)
Therefore 119881 is a positive-definite function and is anegative-definite function From Remark 1 in [14] it is easilyknown that 119878(0) = 0 and it implies that 119881(0) = 0 Thusit implies that 119881(119905) equiv 0 and 119878(119905) equiv 0 This completes theproof
Theorem 3 For the internal dynamic model of the MWIPsystem (the second equation of (3)) the proposed TSMCNDOcontroller (25) guarantees that the angular velocity
120579119908 canconverge to zero
Proof Similar to Proposition 2 in [3] the second equation of(3) can be rewritten as
119876 (119905)120579119908 (119905) + 119863119908
120579119908 (119905) = 119875 (119905) (30)
where 119876(119905) = 11989811 + 11989812 cos(120579119887) gt 0 and 119863119908 gt 0 Thereforewe can know the solution of (30) is asymptotically stableFrom Theorem 2 it follows that 120579119887 and
120579119887 converge to zerowhich makes 119875(119905) finally converge to zero This results in thefinal convergence of
120579119908
4 Simulation Study
In order to verify the performance of the proposed controllerwe present some simulations in this section In the simula-tions the nominal values of system parameters come froma real MWIP-based vehicle All the parameters are given inTable 2
The external disturbance is assumed as
120591ex = 100 sin(2119905 + 120587
2
) (N sdotm) (31)
The augmenting function V(119905) is designed as a cubic polyno-mial
V (119905) =
1198860 + 1198861119905 + 11988621199052+ 11988631199053 if 0 le 119905 le 119879119891
0 if 119905 gt 119879119891
(32)
Table 3 Control parameters of TSMC and TSMCNDO strategies
Controllers ParametersTSMC 119865 = 07119865 119862 = 3 Γ = 3119863 = 03 120601TSMC = 005
TSMCNDO 120574 = 3 119888 = 3 1198891 = 1 1198892 = 1 1198881 = 1198884 = 20001198882 = 1198883 = 0 120601TSMCNDO = 005
where
1198860 = 120579119887 (0) 1198861 =120579119887 (0)
1198862 = minus3(
120579119887 (0)
1198792
119891
) minus 2(
120579119887 (0)
119879119891
)
1198863 = 2(
120579119887 (0)
1198793
119891
) + (
120579119887 (0)
1198792
119891
)
(33)
For the sliding surface 119879119891 = 1 were usedSuppose the initial conditions are given by 120579119887 =
minus10180120587 120579119887 = 0 120579119908 = 0 and
120579119908 = 0We consider the balance control of MWIP systems by
using the conventional linear quadratic regulator (LQR)the TSMC in [14] and the TSMCNDO proposed in thispaper When using the LQR controller an approximatelylinearized dynamic model was established by choosing stateas x = [1199091 1199092 1199093]
119879= [
120579119908 120579119887
120579119887]119879 The calculated
state feedback gain matrix of LQR controller is K =
[minus43141 minus9622 minus2552]In order to avoid chattering associated with the terminal
sliding mode control law we have approximated the dis-continuous sign function sgn(119878) with continuous saturationfunction sat(119878) defined as
sat (119878) =
sgn (119878) if |119878| gt 120601
119878
120601
if |119878| le 120601
120601 gt 0
(34)
where 120601 is boundary layer For applying the two controlstrategies to the subsystem (20) the determined parametersof all controllers are listed in Table 3
The balance control simulation results of the MWIPsystem with uncertainties and disturbances using the LQRthe TSMCgiven by [14] and the TSMCNDOproposed in thispaper are shown in Figures 2 3 4 and 5
Figure 6 shows the inclination angle tracking errors of theMWIP system considering uncertainties and disturbancesusing the two control strategies
From Figures 2ndash6 the following turn out
(1) The control performance of LQR controller seemsworst because it is not designed to deal with themodeluncertainties and external disturbance
(2) Even if there are model uncertainties and externaldisturbance the inclination angle angular velocityand wheel rotation velocity of the MWIP system willfinally converge when either TSMC or TSMCNDOcontroller is employed
6 Mathematical Problems in Engineering
0 5 10 15 20 25 30minus02
minus015
minus01
minus005
0
005
01
015
02
Time (s)
LQRTSMCTSMCNDO
120579b
(rad
)
Figure 2 Inclination angles of the MWIP system by employingLQR TSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘120601TSMC = 120601TSMCNDO = 005)
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus04
minus03
minus02
minus01
0
01
02
03
04
d120579bdt
(rad
s)
Figure 3 Inclination angle velocities of the MWIP system byemploying LQR TSMC and TSMCNDO control strategies (120579119887(0) =minus10∘ 120601TSMC = 120601TSMCNDO = 005)
(3) The control performance of the MWIP system byusing TSMCNDO control strategy is better than theone by using TSMC control strategy The effect ofexternal disturbance on the MWIP system is signif-icantly reduced by using TSMCNDO control strategywhile it still remains when using a conventionalTSMC controller
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus6
minus5
minus4
minus3
minus2
minus1
0
1
2
3
d120579wdt
(rad
s)
Figure 4 Wheel rotation velocities of the MWIP system byemploying LQR TSMC and TSMCNDO control strategies (120579119887(0) =minus10∘ 120601TSMC = 120601TSMCNDO = 005)
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus200
minus150
minus100
minus50
0
50
100
150
200
u(N
middotm)
Figure 5 Control inputs of the MWIP system by employing LQRTSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘ 120601TSMC =
120601TSMCNDO = 005)
In the case of TSMC strategy the control precision ofthe system is mainly related to parameter 120601TSMC In order toimprove the control precision of the MWIP system usuallysmaller value of the parameter 120601TSMC should be chosenHowever the chattering will increase as the value of 120601TSMCdecreases On the other hand when using the TSMCNDOstrategy a satisfactory control performance can be easilyachieved even if the value of parameter 120601TSMCNDO is relatively
Mathematical Problems in Engineering 7
5 10 15 20 25 30Time (s)
minus0015
minus001
minus0005
0
0005
001
0015
TSMCTSMCNDO
Trac
king
erro
r of120579
b(r
ad)
Figure 6 Inclination angle tracking errors of the MWIP system byemploying TSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘120601TSMC = 120601TSMCNDO = 005)
large This is because the NDO can compensate the lumpeddisturbance in a feedforward way
In a word the proposed TSMCNDO control strategy issuperior to a conventional LQR or TSMC strategy in thebalance control of an MWIP system
5 Conclusion
The balance control of MWIP system is a challenge dueto its strong nonlinearity and underactuated feature TheTSMC seems an appropriate method because it can deal withboth the modeling uncertainties and external disturbancesIn addition a TSMC controller can guarantee the systemtrajectory converges in a finite time whereas there arefew researches about the robust finite-time control strategyapplied in an underactuated system such as an MWIP Themain contribution of this paper lies in the following
(1) We formulated the TSMC design for the balancecontrol of the underactuated MWIP system
(2) To remove the ldquochatteringrdquo caused by sliding modecontrol and further improve the control performancea new TSMCNDO strategy is proposed for control-ling the MWIP system
Together with the nonlinear disturbance observer thecontrol precision is significantly enhanced by the proposedmethod even if the boundary layer parameter 120601 is relativelylarge Simulation results demonstrate the effectiveness of theproposed methods
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was partially supported by the InternationalScience and Technology Cooperation Program of HubeiProvince ldquoJoint Research onGreen SmartWalking AssistanceRehabilitant Robotrdquo under Grant no 2012IHA00601 theFundamental Research Funds for the Central Universities(HUST) under Grant no 2013ZZGH007 and the NationalNatural Science Foundation of China under Grant 61473130and was partially supported by Program for New CenturyExcellent Talents in University (Grant no NCET-12-0214)
References
[1] D Kamen ldquoSegway Companyrdquo San Francisco Calif USA 2010httpwwwsegwaycom
[2] F Grasser A DrsquoArrigo S Colombi and A C Rufer ldquoJOE amobile inverted pendulumrdquo IEEE Transactions on IndustrialElectronics vol 49 no 1 pp 107ndash114 2002
[3] J Huang F Ding T Fukuda and T Matsuno ldquoModeling andvelocity control for a novel narrow vehicle based on mobilewheeled inverted pendulumrdquo IEEE Transactions on ControlSystems Technology vol 21 no 5 pp 1607ndash1617 2013
[4] M Sasaki N Yanagihara O Matsumoto and K KomoriyaldquoSteering control of the Personal riding-type wheeled MobilePlatform (PMP)rdquo in Proceedings of the IEEE IRSRSJ Interna-tional Conference on Intelligent Robots and Systems (IROS rsquo05)pp 1697ndash1702 August 2005
[5] A Salerno and J Angeles ldquoThe control of semi-autonomoustwo-wheeled robots undergoing large payload-variationsrdquo inProceedings of the IEEE International Conference onRobotics andAutomation pp 1740ndash1745 May 2004
[6] K Pathak J Franch and S K Agrawal ldquoVelocity and positioncontrol of a wheeled inverted pendulum by partial feedbacklinearizationrdquo IEEE Transactions on Robotics vol 21 no 3 pp505ndash513 2005
[7] C Li X Gao Q Huan et al ldquoA coaxial couple wheeled robotwith T-S fuzzy equilibrium controlrdquo Industrial Robot vol 38no 3 pp 292ndash300 2011
[8] S Jung and S S Kim ldquoControl experiment of a wheel-driven mobile inverted pendulum using neural networkrdquo IEEETransactions on Control Systems Technology vol 16 no 2 pp297ndash303 2008
[9] Z Li C Yang and L FanAdvanced Control ofWheeled InvertedPendulum Systems Springer London UK 2013
[10] V Sankaranarayanan andADMahindrakar ldquoControl of a classof underactuated mechanical systems using sliding modesrdquoIEEE Transactions on Robotics vol 25 no 2 pp 459ndash467 2009
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] J Huang Z-H Guan T Matsuno T Fukuda and K SekiyamaldquoSliding-mode velocity control of mobile-wheeled inverted-pendulum systemsrdquo IEEE Transactions on Robotics vol 26 no4 pp 750ndash758 2010
[13] M Zhihong A P Paplinski and H R Wu ldquoA robust MIMOterminal sliding mode control scheme for rigid robotic manip-ulatorsrdquo IEEE Transactions on Automatic Control vol 39 no 12pp 2464ndash2469 1994
8 Mathematical Problems in Engineering
[14] K-B Park and T Tsuji ldquoTerminal sliding mode control ofsecond-order nonlinear uncertain systemsrdquo International Jour-nal of Robust and Nonlinear Control vol 9 no 11 pp 769ndash7801999
[15] H Bayramoglu and H Komurcugil ldquoNonsingular decoupledterminal sliding-mode control for a class of fourth-ordernonlinear systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 18 no 9 pp 2527ndash2539 2013
[16] H Bayramoglu and H Komurcugil ldquoTime-varying sliding-coefficient-based terminal sliding mode control methods for aclass of fourth-order nonlinear systemsrdquo Nonlinear Dynamicsvol 73 no 3 pp 1645ndash1657 2013
[17] A Mohammadi M Tavakoli H J Marquez and FHashemzadeh ldquoNonlinear disturbance observer designfor robotic manipulatorsrdquo Control Engineering Practice vol 21no 3 pp 253ndash267 2013
[18] W-H Chen ldquoDisturbance observer based control for nonlinearsystemsrdquo IEEEASME Transactions on Mechatronics vol 9 no4 pp 706ndash710 2004
[19] J Wu J Huang Y Wang and K Xing ldquoNonlinear disturbanceobserver-based dynamic surface control for trajectory trackingof pneumatic muscle systemrdquo IEEE Transactions on ControlSystems Technology vol 22 no 2 pp 440ndash455 2014
[20] X Wei H Zhang and L Guo ldquoComposite disturbance-observer-based control and terminal sliding mode control foruncertain structural systemsrdquo International Journal of SystemsScience vol 40 no 10 pp 1009ndash1017 2009
[21] J Yang S Li and X Yu ldquoSliding-mode control for systems withmismatched uncertainties via a disturbance observerrdquo IEEETransactions on Industrial Electronics vol 60 no 1 pp 160ndash1692013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
of control methods of the terminal sliding mode controlcan be mainly divided into two types that is fractionalexponent method such as 119904 = 119890 + 119890
119901119902 [13] and cubicpolynomials [14] Bayramoglu and Komurcugil [15 16] pro-posed a nonsingular decoupled terminal slidingmode control(NDTSMC)method for a class of underactuated fourth-ordernonlinear systems This control method is relatively simpleHowever these references do not involve how to choose twointermediate parameters 119911119906 and Φ119911 which brings difficultyof their practical applications Huang et al [3] for a novelnarrow vehicle based on an MWIP system and a movableseat called UW-Car proposed two terminal sliding modecontrollers to control the velocity and braking
Although TSMC controller is less sensitive to parametervariations and noise disturbances its robustness is normallyobtained by increasing the switch gain 119896 Note that a bigger 119896also brings chatter to the system which is the main drawbackof the SMC
Disturbance observer might be a candidate solution forthe problem It is found that using a disturbance observercan further improve the robustness of controller A nonlineardisturbance observer was proposed by Mohammadi et al[17] to manage the disturbance of nonlinear system whichis applied for a 4-degree-of-freedom SCARA manipulatorChen [18] proposed a nonlinear disturbance observer to dealwith the disturbance of nonlinear system which is appliedto tracking control of pneumatic artificial muscle actuator byusing DSC control method [19] Wei et al [20] for uncertainstructural systems proposed a new type of composite controlscheme of disturbance-observer-based control and terminalsliding mode control (TSMC) Yang et al [21] for systemswith mismatched uncertainties proposed a sliding modecontrol approach by using a novel sliding surface based ona disturbance observer
However most of the aforementioned studies rarelydiscussed terminal sliding mode control with disturbanceobserver for an underactuated system such as the MWIP
In this paper we proposed a terminal sliding modecontrollerwith nonlinear disturbance observer (TSMCNDO)for the balance control of an MWIP system Comparedwith the conventional sliding mode controller in [14] largerstability region very higher control precision and smallerchattering can be achieved by applying the TSMCNDOstrategy
The rest of this paper is organized as follows The MWIPsystem formulation and a nonlinear disturbance observer arediscussed in Section 2 The terminal sliding mode controlwith nonlinear disturbance observer (TSMCNDO) and sta-bility analysis are discussed in Section 3 Section 4 presentssome MATLAB simulation results and the paper finally endsby the conclusion in Section 5
In the rest of this paper (sdot) denotes a nominal value of (sdot)
2 System Formulation
21 MWIP System Dynamic Model The MWIP system is aone-dimensional inverted pendulum that rotates about thewheelsrsquo axles Hence inclination and translational motion of
Table 1 Notations for MWIP parameters
Parameter Description119898119887119898119908 Masses of the body and the wheel119868119887 119868119908 Moments of inertia of the body and the wheel
119897Length between the wheel axle and the center ofgravity of the body
119903 Radius of the wheel119863119887 Viscous resistance in the driving system119863119908 Viscous resistance of the ground119906 Rotation torque generated by the wheel motor
120579b
mb Ib
(xb yb)
120579w
r
u
y
x
mw Iw
(xw yw)
Figure 1 Mobile wheeled inverted pendulum (MWIP) systemmodel
the body determined the whole motion on a plane Figure 1shows the structure of an MWIP system where 120579119887 and 120579119908
are the inclination angle of the body and the wheelrsquos rotationangle respectively To describe the parameters of the MWIPsystem some notations should be clarified first (see alsoFigure 1) which are shown in Table 1
Lagrangersquosmotion equation is used to analyze the dynam-ics of this system which leads to a second-order underactu-ated model given by Huang et al [12] Consider
11989811120579119908 + 11989812 cos (120579119887)
120579119887
= 119906 minus (119863119908 + 119863119887)120579119908 + 119863119887
120579119887 + 11989812
1205792
119887sin (120579119887)
11989812 cos (120579119887) 120579119908 + 11989822
120579119887
= minus119906 minus 119863119887 (120579119887 minus
120579119908) + 119866119887 sin (120579119887)
(1)
where parameters11989811 11989812 11989822 and 119866119887 satisfy
11989811 = (119898119887 + 119898119908) 1199032+ 119868119908
11989812 = 119898119887119897119903
Mathematical Problems in Engineering 3
11989822 = 1198981198871198972+ 119868119887
119866119887 = 119898119887119892119897
(2)
Add the first equation of (1) to the second one and considerexternal disturbance we have
11989811120579119908 + 11989812 cos (120579119887)
120579119887
= 119906 minus (119863119908 + 119863119887)120579119908 + 119863119887
120579119887 + 11989812
1205792
119887sin (120579119887) + 120591ex
(11989811 + 11989812 cos (120579119887)) 120579119908 + (11989822 + 11989812 cos (120579119887))
120579119887
= minus119863119908120579119908 + 11989812
1205792
119887sin (120579119887) + 119866119887 sin (120579119887)
(3)
where 120591ex are used to denote external disturbance
22 Nonlinear Disturbance Observer Design In order toimprove the robustness and control precision of the MWIPsystem it is necessary to design a nonlinear disturbanceobserver estimating model uncertainties and external distur-bance This subsection illustrates the design procedure of anonlinear disturbance observer in the MWIP system
For the nonlinear underactuated system with distur-bances in order to simplify the denotation we can rewrite(3) as
119872(119902) 119902 + 119873 (119902 119902) + 119865 ( 119902) = 120591 + 120591ext (4)
where
119902 = [1199021 1199022]119879= [120579119908 120579119887]
119879
119872 (119902) = [
11989811 11989812 cos (1199022)11989811 + 11989812 cos (1199022) 11989822 + 11989812 cos (1199022)
]
119873 (119902 119902) = [
minus11989812 1199022
2sin (1199022)
minus119866119887 sin (1199022) minus 11989812 1199022
2sin (1199022)
]
119865 ( 119902) = [
(119863119908 + 119863119887) 1199021 minus 119863119887 1199022
119863119908 1199021
]
120591 = [
119906
0] 120591ext = [
120591ex0]
(5)
Then we can get
119872(119902) = (119902) + Δ119872(119902)
119873 (119902 119902) = (119902 119902) + Δ119873 (119902 119902)
(6)
The lumped disturbance vector 120591119889 is defined as
120591119889 = [1205911198891 1205911198892]119879= 120591ext minus Δ119872(119902) 119902 minus Δ119873 (119902 119902) minus 119865 ( 119902) (7)
Therefore the effect of all modelling uncertainties and exter-nal disturbance is lumped into a single disturbance vector 120591119889From (4) it is seen that
(119902) 119902 + (119902 119902) = 120591 + 120591119889 (8)
To estimate the lumped disturbance 120591119889 the nonlinear distur-bance observer is designed as follows
119889 = minus119871120591119889 + 119871 ( (119902) 119902 + (119902 119902) minus 120591) (9)
Define 120591119889 = 120591119889minus120591119889 as the disturbance tracking error and using(9) it is observed that
119889 = 119871120591119889
(10)
or equivalently119889 = 120591119889 minus 119871120591119889
(11)
In general there is no prior information about the derivativeof the disturbance 120591119889 When the disturbance varies slowlyrelative to the observer dynamics it is reasonable to supposethat 120591119889 = 0 Then we get
119889 = minus
119889 = minus119871120591119889
(12)
Let us define an auxiliary variable 119911 = [1199111 1199112]119879= 120591119889minus119901(119902 119902)
where (119889119889119905)119901(119902 119902) = 119871(119902 119902)(119902) 119902 Substitute it into (9) theobserver can be designed as
= 119871 (119902 119902) [ (119902 119902) minus 120591 minus 119901 (119902 119902) minus 119911]
120591119889 = 119911 + 119901 (119902 119902)
(13)
where observer gain matrix 119871(119902 119902) and vector 119901(119902 119902) satisfy
119871 (119902) = 119883minus1(119902)
119901 ( 119902) = 119883 119902
(14)
119883 is a constant invertible matrix that is
119883 = [
1198881 1198882
1198883 1198884
] 119888119894 ge 0 119894 = 1 2 3 4 (15)
Substituting (14) and (15) into (13) and using (4) we have
= [
1
2
]
= 119860minus1[
1198881 1198882
1198883 1198884
] [
22 + 12 cos (120579119887) minus12 cos (120579119887)minus11 minus 12 cos (120579119887) 11
]
sdot [
minus121205792
119887sin (120579119887)
minus119866119887 sin (120579119887) minus 121205792
119887sin (120579119887)
]
minus [
119906
0] minus [
1198881 1198882
1198883 1198884
] [
120579119908
120579119887
] minus [
1199111
1199112
]
= 119860minus1[
11988811198631 minus 11988821198632 119888211 minus 119888112 cos (120579119887)11988831198631 minus 11988841198632 119888411 minus 119888312 cos (120579119887)
]
sdot [
minus121205792
119887sin (120579119887) minus 119906 minus 1198881
120579119908 minus 1198882
120579119887 minus 1199111
minus119866119887 sin (120579119887) minus 121205792
119887sin (120579119887) minus 1198883
120579119908 minus 1198884
120579119887 minus 1199112
]
120591119889 = [
1205911198891
1205911198892
] = [
1199111
1199112
] + [
1198881 1198882
1198883 1198884
] [
120579119908
120579119887
]
(16)
4 Mathematical Problems in Engineering
where1198631 = 22 + 12 cos (120579119887)
1198632 = 11 + 12 cos (120579119887)
119860 = det ( (119902)) = 1122 minus (12 cos (120579119887))2gt 0
(17)
Therefore the disturbance observer can be designed asfollows1
= 119860minus1[ (11988821198632 minus 11988811198631)
sdot (121205792
119887sin (120579119887) + 119906 + 1198881
120579119908 + 1198882
120579119887 + 1199111)
minus (119888211 minus 119888112 cos (120579119887))
times (119866119887 sin (120579119887)+ 121205792
119887sin (120579119887) + 1198883
120579119908 + 1198884
120579119887 + 1199112)]
2
= 119860minus1[ (11988841198632 minus 11988831198631)
sdot (121205792
119887sin (120579119887) + 119906 + 1198881
120579119908 + 1198882
120579119887 + 1199111)
minus (119888411 minus 119888312 cos (120579119887))
times (119866119887 sin (120579119887)+ 121205792
119887sin (120579119887) + 1198883
120579119908 + 1198884
120579119887 + 1199112)]
1205911198891 = 1199111 + 1198881120579119908 + 1198882
120579119887
1205911198892 = 1199112 + 1198883120579119908 + 1198884
120579119887
(18)
3 Controller Design
TheMWIP system model (3) can be rewritten as
11120579119908 + 12 cos (120579119887)
120579119887 = 119906 + 121205792
119887sin (120579119887) + 1205911198891
(11 + 12 cos (120579119887)) 120579119908 + (22 + 12 cos (120579119887))
120579119887
= 121205792
119887sin (120579119887) + 119866119887 sin (120579119887) + 1205911198892
(19)
From the two equations of (19) we have
120579119887 = 119860
minus1[11119866119887 sin (120579119887) minus
2
121205792
119887sin (120579119887) cos (120579119887)]
minus 119860minus1(11 + 12 cos (120579119887)) 119906
+ 119860minus1[111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
(20)
According to the TSMCmethod proposed in [14] the slidingsurface is defined as follows
s (119905) = e (119905) + Ce (119905) minus w (119905) (21)
where e(119905) = x(119905)minusxd(119905) and xd(119905) is the reference value And
C = diag (1198881 1198882 119888119898) 119888119894 gt 0
w (119905) = k (119905) + Ck (119905) (22)
The TSMC method is applied to the subsystem (20) Thedesired inclination angle 120579
lowast
119887and its rate of change
120579lowast
119887are
expected to be zero Let us define the following slidingsurfaces
119878 (119905) =120579119887 (119905) + 119888120579119887 (119905) minus V (119905) minus 119888V (119905) (23)
where 119888 is a positive constantThe augmenting function V(119905) isdesigned as cubic polynomials that guarantee Assumption 1in [14] holds
Assumption 1 The tracking errors of the nonlinear distur-bance observer are bounded and satisfy
10038161003816100381610038161205911198891
1003816100381610038161003816le 1198891
10038161003816100381610038161205911198892
1003816100381610038161003816le 1198892 (24)
where 1198891 and 1198892 are known bounds
Theorem 2 The sliding surfaces (23) will be achieved whilethe inclination angle 120579119887 converges to zero in finite time if thefollowing control law is applied to the subsystem (20)
119906 = (11 + 12 cos (120579119887))minus1
times [11119866119887 sin (120579119887) minus 2
121205792
119887sin (120579119887) cos (120579119887) + 111205911198892
minus (11 + 12 cos (120579119887)) 1205911198891
+119860 (119888120579119887 minus V minus 119888V) + 119896 sgn (119878)]
(25)
where
119896 = 120574 + [111198892 + (11 + 12 cos (120579119887)) 1198891] 120574 gt 0 (26)
Proof Choose the following Lyapunov function candidate
119881 =
1
2
1198782 (27)
Differentiating (27) along the controlled system (20) yields
= 119878 119878 = 119878 [120579119887 + 119888
120579119887 minus V minus 119888V]
= 119878 [119860minus1(11119866119887 sin (120579119887) minus
2
121205792
119887sin (120579119887) cos (120579119887))
minus 119860minus1(11 + 12 cos (120579119887)) 119906
+ 119860minus1[111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
+ 119888120579119887 minus V minus 119888V]
(28)
Substituting (25) into (28)
= 119878 minus119860minus1119896 sgn (119878)
+119860minus1[111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
= minus119860minus1119878 119896 sgn (119878) minus [111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
= minus 119896119860minus1|119878| + 119860
minus1119878 [111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
le minus 119896119860minus1|119878| + 119860
minus1|119878|
1003816100381610038161003816111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891
1003816100381610038161003816
Mathematical Problems in Engineering 5
Table 2 Physical parameters of MWIP system
Parameter Value Parameter Value119898119908 290 (Kg) 119868119908 06 (Kgsdotm2)119903 0254 (m) 119887 2106 (Kg)119868119887 550 (Kgsdotm2)
119897 0267 (m)119898119887 3106 (Kg) 119868119887 650 (Kgsdotm2)119897 0317 (m) 119863119887 01 (Nsdotsm)119863119908 40 (Nsdotsm)
le minus 119896119860minus1|119878| + 119860
minus1|119878| [
1003816100381610038161003816111205911198892
1003816100381610038161003816+1003816100381610038161003816(11 + 12 cos (120579119887)) 1205911198891
1003816100381610038161003816]
le minus 119896119860minus1|119878| + 119860
minus1|119878| [111198892 + (11 + 12 cos (120579119887)) 1198891]
le minus119860minus1|119878| (119896 minus [111198892 + (11 + 12 cos (120579119887)) 1198891])
= minus 120574119860minus1|119878| lt 0
(29)
Therefore 119881 is a positive-definite function and is anegative-definite function From Remark 1 in [14] it is easilyknown that 119878(0) = 0 and it implies that 119881(0) = 0 Thusit implies that 119881(119905) equiv 0 and 119878(119905) equiv 0 This completes theproof
Theorem 3 For the internal dynamic model of the MWIPsystem (the second equation of (3)) the proposed TSMCNDOcontroller (25) guarantees that the angular velocity
120579119908 canconverge to zero
Proof Similar to Proposition 2 in [3] the second equation of(3) can be rewritten as
119876 (119905)120579119908 (119905) + 119863119908
120579119908 (119905) = 119875 (119905) (30)
where 119876(119905) = 11989811 + 11989812 cos(120579119887) gt 0 and 119863119908 gt 0 Thereforewe can know the solution of (30) is asymptotically stableFrom Theorem 2 it follows that 120579119887 and
120579119887 converge to zerowhich makes 119875(119905) finally converge to zero This results in thefinal convergence of
120579119908
4 Simulation Study
In order to verify the performance of the proposed controllerwe present some simulations in this section In the simula-tions the nominal values of system parameters come froma real MWIP-based vehicle All the parameters are given inTable 2
The external disturbance is assumed as
120591ex = 100 sin(2119905 + 120587
2
) (N sdotm) (31)
The augmenting function V(119905) is designed as a cubic polyno-mial
V (119905) =
1198860 + 1198861119905 + 11988621199052+ 11988631199053 if 0 le 119905 le 119879119891
0 if 119905 gt 119879119891
(32)
Table 3 Control parameters of TSMC and TSMCNDO strategies
Controllers ParametersTSMC 119865 = 07119865 119862 = 3 Γ = 3119863 = 03 120601TSMC = 005
TSMCNDO 120574 = 3 119888 = 3 1198891 = 1 1198892 = 1 1198881 = 1198884 = 20001198882 = 1198883 = 0 120601TSMCNDO = 005
where
1198860 = 120579119887 (0) 1198861 =120579119887 (0)
1198862 = minus3(
120579119887 (0)
1198792
119891
) minus 2(
120579119887 (0)
119879119891
)
1198863 = 2(
120579119887 (0)
1198793
119891
) + (
120579119887 (0)
1198792
119891
)
(33)
For the sliding surface 119879119891 = 1 were usedSuppose the initial conditions are given by 120579119887 =
minus10180120587 120579119887 = 0 120579119908 = 0 and
120579119908 = 0We consider the balance control of MWIP systems by
using the conventional linear quadratic regulator (LQR)the TSMC in [14] and the TSMCNDO proposed in thispaper When using the LQR controller an approximatelylinearized dynamic model was established by choosing stateas x = [1199091 1199092 1199093]
119879= [
120579119908 120579119887
120579119887]119879 The calculated
state feedback gain matrix of LQR controller is K =
[minus43141 minus9622 minus2552]In order to avoid chattering associated with the terminal
sliding mode control law we have approximated the dis-continuous sign function sgn(119878) with continuous saturationfunction sat(119878) defined as
sat (119878) =
sgn (119878) if |119878| gt 120601
119878
120601
if |119878| le 120601
120601 gt 0
(34)
where 120601 is boundary layer For applying the two controlstrategies to the subsystem (20) the determined parametersof all controllers are listed in Table 3
The balance control simulation results of the MWIPsystem with uncertainties and disturbances using the LQRthe TSMCgiven by [14] and the TSMCNDOproposed in thispaper are shown in Figures 2 3 4 and 5
Figure 6 shows the inclination angle tracking errors of theMWIP system considering uncertainties and disturbancesusing the two control strategies
From Figures 2ndash6 the following turn out
(1) The control performance of LQR controller seemsworst because it is not designed to deal with themodeluncertainties and external disturbance
(2) Even if there are model uncertainties and externaldisturbance the inclination angle angular velocityand wheel rotation velocity of the MWIP system willfinally converge when either TSMC or TSMCNDOcontroller is employed
6 Mathematical Problems in Engineering
0 5 10 15 20 25 30minus02
minus015
minus01
minus005
0
005
01
015
02
Time (s)
LQRTSMCTSMCNDO
120579b
(rad
)
Figure 2 Inclination angles of the MWIP system by employingLQR TSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘120601TSMC = 120601TSMCNDO = 005)
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus04
minus03
minus02
minus01
0
01
02
03
04
d120579bdt
(rad
s)
Figure 3 Inclination angle velocities of the MWIP system byemploying LQR TSMC and TSMCNDO control strategies (120579119887(0) =minus10∘ 120601TSMC = 120601TSMCNDO = 005)
(3) The control performance of the MWIP system byusing TSMCNDO control strategy is better than theone by using TSMC control strategy The effect ofexternal disturbance on the MWIP system is signif-icantly reduced by using TSMCNDO control strategywhile it still remains when using a conventionalTSMC controller
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus6
minus5
minus4
minus3
minus2
minus1
0
1
2
3
d120579wdt
(rad
s)
Figure 4 Wheel rotation velocities of the MWIP system byemploying LQR TSMC and TSMCNDO control strategies (120579119887(0) =minus10∘ 120601TSMC = 120601TSMCNDO = 005)
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus200
minus150
minus100
minus50
0
50
100
150
200
u(N
middotm)
Figure 5 Control inputs of the MWIP system by employing LQRTSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘ 120601TSMC =
120601TSMCNDO = 005)
In the case of TSMC strategy the control precision ofthe system is mainly related to parameter 120601TSMC In order toimprove the control precision of the MWIP system usuallysmaller value of the parameter 120601TSMC should be chosenHowever the chattering will increase as the value of 120601TSMCdecreases On the other hand when using the TSMCNDOstrategy a satisfactory control performance can be easilyachieved even if the value of parameter 120601TSMCNDO is relatively
Mathematical Problems in Engineering 7
5 10 15 20 25 30Time (s)
minus0015
minus001
minus0005
0
0005
001
0015
TSMCTSMCNDO
Trac
king
erro
r of120579
b(r
ad)
Figure 6 Inclination angle tracking errors of the MWIP system byemploying TSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘120601TSMC = 120601TSMCNDO = 005)
large This is because the NDO can compensate the lumpeddisturbance in a feedforward way
In a word the proposed TSMCNDO control strategy issuperior to a conventional LQR or TSMC strategy in thebalance control of an MWIP system
5 Conclusion
The balance control of MWIP system is a challenge dueto its strong nonlinearity and underactuated feature TheTSMC seems an appropriate method because it can deal withboth the modeling uncertainties and external disturbancesIn addition a TSMC controller can guarantee the systemtrajectory converges in a finite time whereas there arefew researches about the robust finite-time control strategyapplied in an underactuated system such as an MWIP Themain contribution of this paper lies in the following
(1) We formulated the TSMC design for the balancecontrol of the underactuated MWIP system
(2) To remove the ldquochatteringrdquo caused by sliding modecontrol and further improve the control performancea new TSMCNDO strategy is proposed for control-ling the MWIP system
Together with the nonlinear disturbance observer thecontrol precision is significantly enhanced by the proposedmethod even if the boundary layer parameter 120601 is relativelylarge Simulation results demonstrate the effectiveness of theproposed methods
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was partially supported by the InternationalScience and Technology Cooperation Program of HubeiProvince ldquoJoint Research onGreen SmartWalking AssistanceRehabilitant Robotrdquo under Grant no 2012IHA00601 theFundamental Research Funds for the Central Universities(HUST) under Grant no 2013ZZGH007 and the NationalNatural Science Foundation of China under Grant 61473130and was partially supported by Program for New CenturyExcellent Talents in University (Grant no NCET-12-0214)
References
[1] D Kamen ldquoSegway Companyrdquo San Francisco Calif USA 2010httpwwwsegwaycom
[2] F Grasser A DrsquoArrigo S Colombi and A C Rufer ldquoJOE amobile inverted pendulumrdquo IEEE Transactions on IndustrialElectronics vol 49 no 1 pp 107ndash114 2002
[3] J Huang F Ding T Fukuda and T Matsuno ldquoModeling andvelocity control for a novel narrow vehicle based on mobilewheeled inverted pendulumrdquo IEEE Transactions on ControlSystems Technology vol 21 no 5 pp 1607ndash1617 2013
[4] M Sasaki N Yanagihara O Matsumoto and K KomoriyaldquoSteering control of the Personal riding-type wheeled MobilePlatform (PMP)rdquo in Proceedings of the IEEE IRSRSJ Interna-tional Conference on Intelligent Robots and Systems (IROS rsquo05)pp 1697ndash1702 August 2005
[5] A Salerno and J Angeles ldquoThe control of semi-autonomoustwo-wheeled robots undergoing large payload-variationsrdquo inProceedings of the IEEE International Conference onRobotics andAutomation pp 1740ndash1745 May 2004
[6] K Pathak J Franch and S K Agrawal ldquoVelocity and positioncontrol of a wheeled inverted pendulum by partial feedbacklinearizationrdquo IEEE Transactions on Robotics vol 21 no 3 pp505ndash513 2005
[7] C Li X Gao Q Huan et al ldquoA coaxial couple wheeled robotwith T-S fuzzy equilibrium controlrdquo Industrial Robot vol 38no 3 pp 292ndash300 2011
[8] S Jung and S S Kim ldquoControl experiment of a wheel-driven mobile inverted pendulum using neural networkrdquo IEEETransactions on Control Systems Technology vol 16 no 2 pp297ndash303 2008
[9] Z Li C Yang and L FanAdvanced Control ofWheeled InvertedPendulum Systems Springer London UK 2013
[10] V Sankaranarayanan andADMahindrakar ldquoControl of a classof underactuated mechanical systems using sliding modesrdquoIEEE Transactions on Robotics vol 25 no 2 pp 459ndash467 2009
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] J Huang Z-H Guan T Matsuno T Fukuda and K SekiyamaldquoSliding-mode velocity control of mobile-wheeled inverted-pendulum systemsrdquo IEEE Transactions on Robotics vol 26 no4 pp 750ndash758 2010
[13] M Zhihong A P Paplinski and H R Wu ldquoA robust MIMOterminal sliding mode control scheme for rigid robotic manip-ulatorsrdquo IEEE Transactions on Automatic Control vol 39 no 12pp 2464ndash2469 1994
8 Mathematical Problems in Engineering
[14] K-B Park and T Tsuji ldquoTerminal sliding mode control ofsecond-order nonlinear uncertain systemsrdquo International Jour-nal of Robust and Nonlinear Control vol 9 no 11 pp 769ndash7801999
[15] H Bayramoglu and H Komurcugil ldquoNonsingular decoupledterminal sliding-mode control for a class of fourth-ordernonlinear systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 18 no 9 pp 2527ndash2539 2013
[16] H Bayramoglu and H Komurcugil ldquoTime-varying sliding-coefficient-based terminal sliding mode control methods for aclass of fourth-order nonlinear systemsrdquo Nonlinear Dynamicsvol 73 no 3 pp 1645ndash1657 2013
[17] A Mohammadi M Tavakoli H J Marquez and FHashemzadeh ldquoNonlinear disturbance observer designfor robotic manipulatorsrdquo Control Engineering Practice vol 21no 3 pp 253ndash267 2013
[18] W-H Chen ldquoDisturbance observer based control for nonlinearsystemsrdquo IEEEASME Transactions on Mechatronics vol 9 no4 pp 706ndash710 2004
[19] J Wu J Huang Y Wang and K Xing ldquoNonlinear disturbanceobserver-based dynamic surface control for trajectory trackingof pneumatic muscle systemrdquo IEEE Transactions on ControlSystems Technology vol 22 no 2 pp 440ndash455 2014
[20] X Wei H Zhang and L Guo ldquoComposite disturbance-observer-based control and terminal sliding mode control foruncertain structural systemsrdquo International Journal of SystemsScience vol 40 no 10 pp 1009ndash1017 2009
[21] J Yang S Li and X Yu ldquoSliding-mode control for systems withmismatched uncertainties via a disturbance observerrdquo IEEETransactions on Industrial Electronics vol 60 no 1 pp 160ndash1692013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
11989822 = 1198981198871198972+ 119868119887
119866119887 = 119898119887119892119897
(2)
Add the first equation of (1) to the second one and considerexternal disturbance we have
11989811120579119908 + 11989812 cos (120579119887)
120579119887
= 119906 minus (119863119908 + 119863119887)120579119908 + 119863119887
120579119887 + 11989812
1205792
119887sin (120579119887) + 120591ex
(11989811 + 11989812 cos (120579119887)) 120579119908 + (11989822 + 11989812 cos (120579119887))
120579119887
= minus119863119908120579119908 + 11989812
1205792
119887sin (120579119887) + 119866119887 sin (120579119887)
(3)
where 120591ex are used to denote external disturbance
22 Nonlinear Disturbance Observer Design In order toimprove the robustness and control precision of the MWIPsystem it is necessary to design a nonlinear disturbanceobserver estimating model uncertainties and external distur-bance This subsection illustrates the design procedure of anonlinear disturbance observer in the MWIP system
For the nonlinear underactuated system with distur-bances in order to simplify the denotation we can rewrite(3) as
119872(119902) 119902 + 119873 (119902 119902) + 119865 ( 119902) = 120591 + 120591ext (4)
where
119902 = [1199021 1199022]119879= [120579119908 120579119887]
119879
119872 (119902) = [
11989811 11989812 cos (1199022)11989811 + 11989812 cos (1199022) 11989822 + 11989812 cos (1199022)
]
119873 (119902 119902) = [
minus11989812 1199022
2sin (1199022)
minus119866119887 sin (1199022) minus 11989812 1199022
2sin (1199022)
]
119865 ( 119902) = [
(119863119908 + 119863119887) 1199021 minus 119863119887 1199022
119863119908 1199021
]
120591 = [
119906
0] 120591ext = [
120591ex0]
(5)
Then we can get
119872(119902) = (119902) + Δ119872(119902)
119873 (119902 119902) = (119902 119902) + Δ119873 (119902 119902)
(6)
The lumped disturbance vector 120591119889 is defined as
120591119889 = [1205911198891 1205911198892]119879= 120591ext minus Δ119872(119902) 119902 minus Δ119873 (119902 119902) minus 119865 ( 119902) (7)
Therefore the effect of all modelling uncertainties and exter-nal disturbance is lumped into a single disturbance vector 120591119889From (4) it is seen that
(119902) 119902 + (119902 119902) = 120591 + 120591119889 (8)
To estimate the lumped disturbance 120591119889 the nonlinear distur-bance observer is designed as follows
119889 = minus119871120591119889 + 119871 ( (119902) 119902 + (119902 119902) minus 120591) (9)
Define 120591119889 = 120591119889minus120591119889 as the disturbance tracking error and using(9) it is observed that
119889 = 119871120591119889
(10)
or equivalently119889 = 120591119889 minus 119871120591119889
(11)
In general there is no prior information about the derivativeof the disturbance 120591119889 When the disturbance varies slowlyrelative to the observer dynamics it is reasonable to supposethat 120591119889 = 0 Then we get
119889 = minus
119889 = minus119871120591119889
(12)
Let us define an auxiliary variable 119911 = [1199111 1199112]119879= 120591119889minus119901(119902 119902)
where (119889119889119905)119901(119902 119902) = 119871(119902 119902)(119902) 119902 Substitute it into (9) theobserver can be designed as
= 119871 (119902 119902) [ (119902 119902) minus 120591 minus 119901 (119902 119902) minus 119911]
120591119889 = 119911 + 119901 (119902 119902)
(13)
where observer gain matrix 119871(119902 119902) and vector 119901(119902 119902) satisfy
119871 (119902) = 119883minus1(119902)
119901 ( 119902) = 119883 119902
(14)
119883 is a constant invertible matrix that is
119883 = [
1198881 1198882
1198883 1198884
] 119888119894 ge 0 119894 = 1 2 3 4 (15)
Substituting (14) and (15) into (13) and using (4) we have
= [
1
2
]
= 119860minus1[
1198881 1198882
1198883 1198884
] [
22 + 12 cos (120579119887) minus12 cos (120579119887)minus11 minus 12 cos (120579119887) 11
]
sdot [
minus121205792
119887sin (120579119887)
minus119866119887 sin (120579119887) minus 121205792
119887sin (120579119887)
]
minus [
119906
0] minus [
1198881 1198882
1198883 1198884
] [
120579119908
120579119887
] minus [
1199111
1199112
]
= 119860minus1[
11988811198631 minus 11988821198632 119888211 minus 119888112 cos (120579119887)11988831198631 minus 11988841198632 119888411 minus 119888312 cos (120579119887)
]
sdot [
minus121205792
119887sin (120579119887) minus 119906 minus 1198881
120579119908 minus 1198882
120579119887 minus 1199111
minus119866119887 sin (120579119887) minus 121205792
119887sin (120579119887) minus 1198883
120579119908 minus 1198884
120579119887 minus 1199112
]
120591119889 = [
1205911198891
1205911198892
] = [
1199111
1199112
] + [
1198881 1198882
1198883 1198884
] [
120579119908
120579119887
]
(16)
4 Mathematical Problems in Engineering
where1198631 = 22 + 12 cos (120579119887)
1198632 = 11 + 12 cos (120579119887)
119860 = det ( (119902)) = 1122 minus (12 cos (120579119887))2gt 0
(17)
Therefore the disturbance observer can be designed asfollows1
= 119860minus1[ (11988821198632 minus 11988811198631)
sdot (121205792
119887sin (120579119887) + 119906 + 1198881
120579119908 + 1198882
120579119887 + 1199111)
minus (119888211 minus 119888112 cos (120579119887))
times (119866119887 sin (120579119887)+ 121205792
119887sin (120579119887) + 1198883
120579119908 + 1198884
120579119887 + 1199112)]
2
= 119860minus1[ (11988841198632 minus 11988831198631)
sdot (121205792
119887sin (120579119887) + 119906 + 1198881
120579119908 + 1198882
120579119887 + 1199111)
minus (119888411 minus 119888312 cos (120579119887))
times (119866119887 sin (120579119887)+ 121205792
119887sin (120579119887) + 1198883
120579119908 + 1198884
120579119887 + 1199112)]
1205911198891 = 1199111 + 1198881120579119908 + 1198882
120579119887
1205911198892 = 1199112 + 1198883120579119908 + 1198884
120579119887
(18)
3 Controller Design
TheMWIP system model (3) can be rewritten as
11120579119908 + 12 cos (120579119887)
120579119887 = 119906 + 121205792
119887sin (120579119887) + 1205911198891
(11 + 12 cos (120579119887)) 120579119908 + (22 + 12 cos (120579119887))
120579119887
= 121205792
119887sin (120579119887) + 119866119887 sin (120579119887) + 1205911198892
(19)
From the two equations of (19) we have
120579119887 = 119860
minus1[11119866119887 sin (120579119887) minus
2
121205792
119887sin (120579119887) cos (120579119887)]
minus 119860minus1(11 + 12 cos (120579119887)) 119906
+ 119860minus1[111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
(20)
According to the TSMCmethod proposed in [14] the slidingsurface is defined as follows
s (119905) = e (119905) + Ce (119905) minus w (119905) (21)
where e(119905) = x(119905)minusxd(119905) and xd(119905) is the reference value And
C = diag (1198881 1198882 119888119898) 119888119894 gt 0
w (119905) = k (119905) + Ck (119905) (22)
The TSMC method is applied to the subsystem (20) Thedesired inclination angle 120579
lowast
119887and its rate of change
120579lowast
119887are
expected to be zero Let us define the following slidingsurfaces
119878 (119905) =120579119887 (119905) + 119888120579119887 (119905) minus V (119905) minus 119888V (119905) (23)
where 119888 is a positive constantThe augmenting function V(119905) isdesigned as cubic polynomials that guarantee Assumption 1in [14] holds
Assumption 1 The tracking errors of the nonlinear distur-bance observer are bounded and satisfy
10038161003816100381610038161205911198891
1003816100381610038161003816le 1198891
10038161003816100381610038161205911198892
1003816100381610038161003816le 1198892 (24)
where 1198891 and 1198892 are known bounds
Theorem 2 The sliding surfaces (23) will be achieved whilethe inclination angle 120579119887 converges to zero in finite time if thefollowing control law is applied to the subsystem (20)
119906 = (11 + 12 cos (120579119887))minus1
times [11119866119887 sin (120579119887) minus 2
121205792
119887sin (120579119887) cos (120579119887) + 111205911198892
minus (11 + 12 cos (120579119887)) 1205911198891
+119860 (119888120579119887 minus V minus 119888V) + 119896 sgn (119878)]
(25)
where
119896 = 120574 + [111198892 + (11 + 12 cos (120579119887)) 1198891] 120574 gt 0 (26)
Proof Choose the following Lyapunov function candidate
119881 =
1
2
1198782 (27)
Differentiating (27) along the controlled system (20) yields
= 119878 119878 = 119878 [120579119887 + 119888
120579119887 minus V minus 119888V]
= 119878 [119860minus1(11119866119887 sin (120579119887) minus
2
121205792
119887sin (120579119887) cos (120579119887))
minus 119860minus1(11 + 12 cos (120579119887)) 119906
+ 119860minus1[111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
+ 119888120579119887 minus V minus 119888V]
(28)
Substituting (25) into (28)
= 119878 minus119860minus1119896 sgn (119878)
+119860minus1[111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
= minus119860minus1119878 119896 sgn (119878) minus [111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
= minus 119896119860minus1|119878| + 119860
minus1119878 [111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
le minus 119896119860minus1|119878| + 119860
minus1|119878|
1003816100381610038161003816111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891
1003816100381610038161003816
Mathematical Problems in Engineering 5
Table 2 Physical parameters of MWIP system
Parameter Value Parameter Value119898119908 290 (Kg) 119868119908 06 (Kgsdotm2)119903 0254 (m) 119887 2106 (Kg)119868119887 550 (Kgsdotm2)
119897 0267 (m)119898119887 3106 (Kg) 119868119887 650 (Kgsdotm2)119897 0317 (m) 119863119887 01 (Nsdotsm)119863119908 40 (Nsdotsm)
le minus 119896119860minus1|119878| + 119860
minus1|119878| [
1003816100381610038161003816111205911198892
1003816100381610038161003816+1003816100381610038161003816(11 + 12 cos (120579119887)) 1205911198891
1003816100381610038161003816]
le minus 119896119860minus1|119878| + 119860
minus1|119878| [111198892 + (11 + 12 cos (120579119887)) 1198891]
le minus119860minus1|119878| (119896 minus [111198892 + (11 + 12 cos (120579119887)) 1198891])
= minus 120574119860minus1|119878| lt 0
(29)
Therefore 119881 is a positive-definite function and is anegative-definite function From Remark 1 in [14] it is easilyknown that 119878(0) = 0 and it implies that 119881(0) = 0 Thusit implies that 119881(119905) equiv 0 and 119878(119905) equiv 0 This completes theproof
Theorem 3 For the internal dynamic model of the MWIPsystem (the second equation of (3)) the proposed TSMCNDOcontroller (25) guarantees that the angular velocity
120579119908 canconverge to zero
Proof Similar to Proposition 2 in [3] the second equation of(3) can be rewritten as
119876 (119905)120579119908 (119905) + 119863119908
120579119908 (119905) = 119875 (119905) (30)
where 119876(119905) = 11989811 + 11989812 cos(120579119887) gt 0 and 119863119908 gt 0 Thereforewe can know the solution of (30) is asymptotically stableFrom Theorem 2 it follows that 120579119887 and
120579119887 converge to zerowhich makes 119875(119905) finally converge to zero This results in thefinal convergence of
120579119908
4 Simulation Study
In order to verify the performance of the proposed controllerwe present some simulations in this section In the simula-tions the nominal values of system parameters come froma real MWIP-based vehicle All the parameters are given inTable 2
The external disturbance is assumed as
120591ex = 100 sin(2119905 + 120587
2
) (N sdotm) (31)
The augmenting function V(119905) is designed as a cubic polyno-mial
V (119905) =
1198860 + 1198861119905 + 11988621199052+ 11988631199053 if 0 le 119905 le 119879119891
0 if 119905 gt 119879119891
(32)
Table 3 Control parameters of TSMC and TSMCNDO strategies
Controllers ParametersTSMC 119865 = 07119865 119862 = 3 Γ = 3119863 = 03 120601TSMC = 005
TSMCNDO 120574 = 3 119888 = 3 1198891 = 1 1198892 = 1 1198881 = 1198884 = 20001198882 = 1198883 = 0 120601TSMCNDO = 005
where
1198860 = 120579119887 (0) 1198861 =120579119887 (0)
1198862 = minus3(
120579119887 (0)
1198792
119891
) minus 2(
120579119887 (0)
119879119891
)
1198863 = 2(
120579119887 (0)
1198793
119891
) + (
120579119887 (0)
1198792
119891
)
(33)
For the sliding surface 119879119891 = 1 were usedSuppose the initial conditions are given by 120579119887 =
minus10180120587 120579119887 = 0 120579119908 = 0 and
120579119908 = 0We consider the balance control of MWIP systems by
using the conventional linear quadratic regulator (LQR)the TSMC in [14] and the TSMCNDO proposed in thispaper When using the LQR controller an approximatelylinearized dynamic model was established by choosing stateas x = [1199091 1199092 1199093]
119879= [
120579119908 120579119887
120579119887]119879 The calculated
state feedback gain matrix of LQR controller is K =
[minus43141 minus9622 minus2552]In order to avoid chattering associated with the terminal
sliding mode control law we have approximated the dis-continuous sign function sgn(119878) with continuous saturationfunction sat(119878) defined as
sat (119878) =
sgn (119878) if |119878| gt 120601
119878
120601
if |119878| le 120601
120601 gt 0
(34)
where 120601 is boundary layer For applying the two controlstrategies to the subsystem (20) the determined parametersof all controllers are listed in Table 3
The balance control simulation results of the MWIPsystem with uncertainties and disturbances using the LQRthe TSMCgiven by [14] and the TSMCNDOproposed in thispaper are shown in Figures 2 3 4 and 5
Figure 6 shows the inclination angle tracking errors of theMWIP system considering uncertainties and disturbancesusing the two control strategies
From Figures 2ndash6 the following turn out
(1) The control performance of LQR controller seemsworst because it is not designed to deal with themodeluncertainties and external disturbance
(2) Even if there are model uncertainties and externaldisturbance the inclination angle angular velocityand wheel rotation velocity of the MWIP system willfinally converge when either TSMC or TSMCNDOcontroller is employed
6 Mathematical Problems in Engineering
0 5 10 15 20 25 30minus02
minus015
minus01
minus005
0
005
01
015
02
Time (s)
LQRTSMCTSMCNDO
120579b
(rad
)
Figure 2 Inclination angles of the MWIP system by employingLQR TSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘120601TSMC = 120601TSMCNDO = 005)
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus04
minus03
minus02
minus01
0
01
02
03
04
d120579bdt
(rad
s)
Figure 3 Inclination angle velocities of the MWIP system byemploying LQR TSMC and TSMCNDO control strategies (120579119887(0) =minus10∘ 120601TSMC = 120601TSMCNDO = 005)
(3) The control performance of the MWIP system byusing TSMCNDO control strategy is better than theone by using TSMC control strategy The effect ofexternal disturbance on the MWIP system is signif-icantly reduced by using TSMCNDO control strategywhile it still remains when using a conventionalTSMC controller
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus6
minus5
minus4
minus3
minus2
minus1
0
1
2
3
d120579wdt
(rad
s)
Figure 4 Wheel rotation velocities of the MWIP system byemploying LQR TSMC and TSMCNDO control strategies (120579119887(0) =minus10∘ 120601TSMC = 120601TSMCNDO = 005)
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus200
minus150
minus100
minus50
0
50
100
150
200
u(N
middotm)
Figure 5 Control inputs of the MWIP system by employing LQRTSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘ 120601TSMC =
120601TSMCNDO = 005)
In the case of TSMC strategy the control precision ofthe system is mainly related to parameter 120601TSMC In order toimprove the control precision of the MWIP system usuallysmaller value of the parameter 120601TSMC should be chosenHowever the chattering will increase as the value of 120601TSMCdecreases On the other hand when using the TSMCNDOstrategy a satisfactory control performance can be easilyachieved even if the value of parameter 120601TSMCNDO is relatively
Mathematical Problems in Engineering 7
5 10 15 20 25 30Time (s)
minus0015
minus001
minus0005
0
0005
001
0015
TSMCTSMCNDO
Trac
king
erro
r of120579
b(r
ad)
Figure 6 Inclination angle tracking errors of the MWIP system byemploying TSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘120601TSMC = 120601TSMCNDO = 005)
large This is because the NDO can compensate the lumpeddisturbance in a feedforward way
In a word the proposed TSMCNDO control strategy issuperior to a conventional LQR or TSMC strategy in thebalance control of an MWIP system
5 Conclusion
The balance control of MWIP system is a challenge dueto its strong nonlinearity and underactuated feature TheTSMC seems an appropriate method because it can deal withboth the modeling uncertainties and external disturbancesIn addition a TSMC controller can guarantee the systemtrajectory converges in a finite time whereas there arefew researches about the robust finite-time control strategyapplied in an underactuated system such as an MWIP Themain contribution of this paper lies in the following
(1) We formulated the TSMC design for the balancecontrol of the underactuated MWIP system
(2) To remove the ldquochatteringrdquo caused by sliding modecontrol and further improve the control performancea new TSMCNDO strategy is proposed for control-ling the MWIP system
Together with the nonlinear disturbance observer thecontrol precision is significantly enhanced by the proposedmethod even if the boundary layer parameter 120601 is relativelylarge Simulation results demonstrate the effectiveness of theproposed methods
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was partially supported by the InternationalScience and Technology Cooperation Program of HubeiProvince ldquoJoint Research onGreen SmartWalking AssistanceRehabilitant Robotrdquo under Grant no 2012IHA00601 theFundamental Research Funds for the Central Universities(HUST) under Grant no 2013ZZGH007 and the NationalNatural Science Foundation of China under Grant 61473130and was partially supported by Program for New CenturyExcellent Talents in University (Grant no NCET-12-0214)
References
[1] D Kamen ldquoSegway Companyrdquo San Francisco Calif USA 2010httpwwwsegwaycom
[2] F Grasser A DrsquoArrigo S Colombi and A C Rufer ldquoJOE amobile inverted pendulumrdquo IEEE Transactions on IndustrialElectronics vol 49 no 1 pp 107ndash114 2002
[3] J Huang F Ding T Fukuda and T Matsuno ldquoModeling andvelocity control for a novel narrow vehicle based on mobilewheeled inverted pendulumrdquo IEEE Transactions on ControlSystems Technology vol 21 no 5 pp 1607ndash1617 2013
[4] M Sasaki N Yanagihara O Matsumoto and K KomoriyaldquoSteering control of the Personal riding-type wheeled MobilePlatform (PMP)rdquo in Proceedings of the IEEE IRSRSJ Interna-tional Conference on Intelligent Robots and Systems (IROS rsquo05)pp 1697ndash1702 August 2005
[5] A Salerno and J Angeles ldquoThe control of semi-autonomoustwo-wheeled robots undergoing large payload-variationsrdquo inProceedings of the IEEE International Conference onRobotics andAutomation pp 1740ndash1745 May 2004
[6] K Pathak J Franch and S K Agrawal ldquoVelocity and positioncontrol of a wheeled inverted pendulum by partial feedbacklinearizationrdquo IEEE Transactions on Robotics vol 21 no 3 pp505ndash513 2005
[7] C Li X Gao Q Huan et al ldquoA coaxial couple wheeled robotwith T-S fuzzy equilibrium controlrdquo Industrial Robot vol 38no 3 pp 292ndash300 2011
[8] S Jung and S S Kim ldquoControl experiment of a wheel-driven mobile inverted pendulum using neural networkrdquo IEEETransactions on Control Systems Technology vol 16 no 2 pp297ndash303 2008
[9] Z Li C Yang and L FanAdvanced Control ofWheeled InvertedPendulum Systems Springer London UK 2013
[10] V Sankaranarayanan andADMahindrakar ldquoControl of a classof underactuated mechanical systems using sliding modesrdquoIEEE Transactions on Robotics vol 25 no 2 pp 459ndash467 2009
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] J Huang Z-H Guan T Matsuno T Fukuda and K SekiyamaldquoSliding-mode velocity control of mobile-wheeled inverted-pendulum systemsrdquo IEEE Transactions on Robotics vol 26 no4 pp 750ndash758 2010
[13] M Zhihong A P Paplinski and H R Wu ldquoA robust MIMOterminal sliding mode control scheme for rigid robotic manip-ulatorsrdquo IEEE Transactions on Automatic Control vol 39 no 12pp 2464ndash2469 1994
8 Mathematical Problems in Engineering
[14] K-B Park and T Tsuji ldquoTerminal sliding mode control ofsecond-order nonlinear uncertain systemsrdquo International Jour-nal of Robust and Nonlinear Control vol 9 no 11 pp 769ndash7801999
[15] H Bayramoglu and H Komurcugil ldquoNonsingular decoupledterminal sliding-mode control for a class of fourth-ordernonlinear systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 18 no 9 pp 2527ndash2539 2013
[16] H Bayramoglu and H Komurcugil ldquoTime-varying sliding-coefficient-based terminal sliding mode control methods for aclass of fourth-order nonlinear systemsrdquo Nonlinear Dynamicsvol 73 no 3 pp 1645ndash1657 2013
[17] A Mohammadi M Tavakoli H J Marquez and FHashemzadeh ldquoNonlinear disturbance observer designfor robotic manipulatorsrdquo Control Engineering Practice vol 21no 3 pp 253ndash267 2013
[18] W-H Chen ldquoDisturbance observer based control for nonlinearsystemsrdquo IEEEASME Transactions on Mechatronics vol 9 no4 pp 706ndash710 2004
[19] J Wu J Huang Y Wang and K Xing ldquoNonlinear disturbanceobserver-based dynamic surface control for trajectory trackingof pneumatic muscle systemrdquo IEEE Transactions on ControlSystems Technology vol 22 no 2 pp 440ndash455 2014
[20] X Wei H Zhang and L Guo ldquoComposite disturbance-observer-based control and terminal sliding mode control foruncertain structural systemsrdquo International Journal of SystemsScience vol 40 no 10 pp 1009ndash1017 2009
[21] J Yang S Li and X Yu ldquoSliding-mode control for systems withmismatched uncertainties via a disturbance observerrdquo IEEETransactions on Industrial Electronics vol 60 no 1 pp 160ndash1692013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
where1198631 = 22 + 12 cos (120579119887)
1198632 = 11 + 12 cos (120579119887)
119860 = det ( (119902)) = 1122 minus (12 cos (120579119887))2gt 0
(17)
Therefore the disturbance observer can be designed asfollows1
= 119860minus1[ (11988821198632 minus 11988811198631)
sdot (121205792
119887sin (120579119887) + 119906 + 1198881
120579119908 + 1198882
120579119887 + 1199111)
minus (119888211 minus 119888112 cos (120579119887))
times (119866119887 sin (120579119887)+ 121205792
119887sin (120579119887) + 1198883
120579119908 + 1198884
120579119887 + 1199112)]
2
= 119860minus1[ (11988841198632 minus 11988831198631)
sdot (121205792
119887sin (120579119887) + 119906 + 1198881
120579119908 + 1198882
120579119887 + 1199111)
minus (119888411 minus 119888312 cos (120579119887))
times (119866119887 sin (120579119887)+ 121205792
119887sin (120579119887) + 1198883
120579119908 + 1198884
120579119887 + 1199112)]
1205911198891 = 1199111 + 1198881120579119908 + 1198882
120579119887
1205911198892 = 1199112 + 1198883120579119908 + 1198884
120579119887
(18)
3 Controller Design
TheMWIP system model (3) can be rewritten as
11120579119908 + 12 cos (120579119887)
120579119887 = 119906 + 121205792
119887sin (120579119887) + 1205911198891
(11 + 12 cos (120579119887)) 120579119908 + (22 + 12 cos (120579119887))
120579119887
= 121205792
119887sin (120579119887) + 119866119887 sin (120579119887) + 1205911198892
(19)
From the two equations of (19) we have
120579119887 = 119860
minus1[11119866119887 sin (120579119887) minus
2
121205792
119887sin (120579119887) cos (120579119887)]
minus 119860minus1(11 + 12 cos (120579119887)) 119906
+ 119860minus1[111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
(20)
According to the TSMCmethod proposed in [14] the slidingsurface is defined as follows
s (119905) = e (119905) + Ce (119905) minus w (119905) (21)
where e(119905) = x(119905)minusxd(119905) and xd(119905) is the reference value And
C = diag (1198881 1198882 119888119898) 119888119894 gt 0
w (119905) = k (119905) + Ck (119905) (22)
The TSMC method is applied to the subsystem (20) Thedesired inclination angle 120579
lowast
119887and its rate of change
120579lowast
119887are
expected to be zero Let us define the following slidingsurfaces
119878 (119905) =120579119887 (119905) + 119888120579119887 (119905) minus V (119905) minus 119888V (119905) (23)
where 119888 is a positive constantThe augmenting function V(119905) isdesigned as cubic polynomials that guarantee Assumption 1in [14] holds
Assumption 1 The tracking errors of the nonlinear distur-bance observer are bounded and satisfy
10038161003816100381610038161205911198891
1003816100381610038161003816le 1198891
10038161003816100381610038161205911198892
1003816100381610038161003816le 1198892 (24)
where 1198891 and 1198892 are known bounds
Theorem 2 The sliding surfaces (23) will be achieved whilethe inclination angle 120579119887 converges to zero in finite time if thefollowing control law is applied to the subsystem (20)
119906 = (11 + 12 cos (120579119887))minus1
times [11119866119887 sin (120579119887) minus 2
121205792
119887sin (120579119887) cos (120579119887) + 111205911198892
minus (11 + 12 cos (120579119887)) 1205911198891
+119860 (119888120579119887 minus V minus 119888V) + 119896 sgn (119878)]
(25)
where
119896 = 120574 + [111198892 + (11 + 12 cos (120579119887)) 1198891] 120574 gt 0 (26)
Proof Choose the following Lyapunov function candidate
119881 =
1
2
1198782 (27)
Differentiating (27) along the controlled system (20) yields
= 119878 119878 = 119878 [120579119887 + 119888
120579119887 minus V minus 119888V]
= 119878 [119860minus1(11119866119887 sin (120579119887) minus
2
121205792
119887sin (120579119887) cos (120579119887))
minus 119860minus1(11 + 12 cos (120579119887)) 119906
+ 119860minus1[111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
+ 119888120579119887 minus V minus 119888V]
(28)
Substituting (25) into (28)
= 119878 minus119860minus1119896 sgn (119878)
+119860minus1[111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
= minus119860minus1119878 119896 sgn (119878) minus [111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
= minus 119896119860minus1|119878| + 119860
minus1119878 [111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891]
le minus 119896119860minus1|119878| + 119860
minus1|119878|
1003816100381610038161003816111205911198892 minus (11 + 12 cos (120579119887)) 1205911198891
1003816100381610038161003816
Mathematical Problems in Engineering 5
Table 2 Physical parameters of MWIP system
Parameter Value Parameter Value119898119908 290 (Kg) 119868119908 06 (Kgsdotm2)119903 0254 (m) 119887 2106 (Kg)119868119887 550 (Kgsdotm2)
119897 0267 (m)119898119887 3106 (Kg) 119868119887 650 (Kgsdotm2)119897 0317 (m) 119863119887 01 (Nsdotsm)119863119908 40 (Nsdotsm)
le minus 119896119860minus1|119878| + 119860
minus1|119878| [
1003816100381610038161003816111205911198892
1003816100381610038161003816+1003816100381610038161003816(11 + 12 cos (120579119887)) 1205911198891
1003816100381610038161003816]
le minus 119896119860minus1|119878| + 119860
minus1|119878| [111198892 + (11 + 12 cos (120579119887)) 1198891]
le minus119860minus1|119878| (119896 minus [111198892 + (11 + 12 cos (120579119887)) 1198891])
= minus 120574119860minus1|119878| lt 0
(29)
Therefore 119881 is a positive-definite function and is anegative-definite function From Remark 1 in [14] it is easilyknown that 119878(0) = 0 and it implies that 119881(0) = 0 Thusit implies that 119881(119905) equiv 0 and 119878(119905) equiv 0 This completes theproof
Theorem 3 For the internal dynamic model of the MWIPsystem (the second equation of (3)) the proposed TSMCNDOcontroller (25) guarantees that the angular velocity
120579119908 canconverge to zero
Proof Similar to Proposition 2 in [3] the second equation of(3) can be rewritten as
119876 (119905)120579119908 (119905) + 119863119908
120579119908 (119905) = 119875 (119905) (30)
where 119876(119905) = 11989811 + 11989812 cos(120579119887) gt 0 and 119863119908 gt 0 Thereforewe can know the solution of (30) is asymptotically stableFrom Theorem 2 it follows that 120579119887 and
120579119887 converge to zerowhich makes 119875(119905) finally converge to zero This results in thefinal convergence of
120579119908
4 Simulation Study
In order to verify the performance of the proposed controllerwe present some simulations in this section In the simula-tions the nominal values of system parameters come froma real MWIP-based vehicle All the parameters are given inTable 2
The external disturbance is assumed as
120591ex = 100 sin(2119905 + 120587
2
) (N sdotm) (31)
The augmenting function V(119905) is designed as a cubic polyno-mial
V (119905) =
1198860 + 1198861119905 + 11988621199052+ 11988631199053 if 0 le 119905 le 119879119891
0 if 119905 gt 119879119891
(32)
Table 3 Control parameters of TSMC and TSMCNDO strategies
Controllers ParametersTSMC 119865 = 07119865 119862 = 3 Γ = 3119863 = 03 120601TSMC = 005
TSMCNDO 120574 = 3 119888 = 3 1198891 = 1 1198892 = 1 1198881 = 1198884 = 20001198882 = 1198883 = 0 120601TSMCNDO = 005
where
1198860 = 120579119887 (0) 1198861 =120579119887 (0)
1198862 = minus3(
120579119887 (0)
1198792
119891
) minus 2(
120579119887 (0)
119879119891
)
1198863 = 2(
120579119887 (0)
1198793
119891
) + (
120579119887 (0)
1198792
119891
)
(33)
For the sliding surface 119879119891 = 1 were usedSuppose the initial conditions are given by 120579119887 =
minus10180120587 120579119887 = 0 120579119908 = 0 and
120579119908 = 0We consider the balance control of MWIP systems by
using the conventional linear quadratic regulator (LQR)the TSMC in [14] and the TSMCNDO proposed in thispaper When using the LQR controller an approximatelylinearized dynamic model was established by choosing stateas x = [1199091 1199092 1199093]
119879= [
120579119908 120579119887
120579119887]119879 The calculated
state feedback gain matrix of LQR controller is K =
[minus43141 minus9622 minus2552]In order to avoid chattering associated with the terminal
sliding mode control law we have approximated the dis-continuous sign function sgn(119878) with continuous saturationfunction sat(119878) defined as
sat (119878) =
sgn (119878) if |119878| gt 120601
119878
120601
if |119878| le 120601
120601 gt 0
(34)
where 120601 is boundary layer For applying the two controlstrategies to the subsystem (20) the determined parametersof all controllers are listed in Table 3
The balance control simulation results of the MWIPsystem with uncertainties and disturbances using the LQRthe TSMCgiven by [14] and the TSMCNDOproposed in thispaper are shown in Figures 2 3 4 and 5
Figure 6 shows the inclination angle tracking errors of theMWIP system considering uncertainties and disturbancesusing the two control strategies
From Figures 2ndash6 the following turn out
(1) The control performance of LQR controller seemsworst because it is not designed to deal with themodeluncertainties and external disturbance
(2) Even if there are model uncertainties and externaldisturbance the inclination angle angular velocityand wheel rotation velocity of the MWIP system willfinally converge when either TSMC or TSMCNDOcontroller is employed
6 Mathematical Problems in Engineering
0 5 10 15 20 25 30minus02
minus015
minus01
minus005
0
005
01
015
02
Time (s)
LQRTSMCTSMCNDO
120579b
(rad
)
Figure 2 Inclination angles of the MWIP system by employingLQR TSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘120601TSMC = 120601TSMCNDO = 005)
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus04
minus03
minus02
minus01
0
01
02
03
04
d120579bdt
(rad
s)
Figure 3 Inclination angle velocities of the MWIP system byemploying LQR TSMC and TSMCNDO control strategies (120579119887(0) =minus10∘ 120601TSMC = 120601TSMCNDO = 005)
(3) The control performance of the MWIP system byusing TSMCNDO control strategy is better than theone by using TSMC control strategy The effect ofexternal disturbance on the MWIP system is signif-icantly reduced by using TSMCNDO control strategywhile it still remains when using a conventionalTSMC controller
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus6
minus5
minus4
minus3
minus2
minus1
0
1
2
3
d120579wdt
(rad
s)
Figure 4 Wheel rotation velocities of the MWIP system byemploying LQR TSMC and TSMCNDO control strategies (120579119887(0) =minus10∘ 120601TSMC = 120601TSMCNDO = 005)
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus200
minus150
minus100
minus50
0
50
100
150
200
u(N
middotm)
Figure 5 Control inputs of the MWIP system by employing LQRTSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘ 120601TSMC =
120601TSMCNDO = 005)
In the case of TSMC strategy the control precision ofthe system is mainly related to parameter 120601TSMC In order toimprove the control precision of the MWIP system usuallysmaller value of the parameter 120601TSMC should be chosenHowever the chattering will increase as the value of 120601TSMCdecreases On the other hand when using the TSMCNDOstrategy a satisfactory control performance can be easilyachieved even if the value of parameter 120601TSMCNDO is relatively
Mathematical Problems in Engineering 7
5 10 15 20 25 30Time (s)
minus0015
minus001
minus0005
0
0005
001
0015
TSMCTSMCNDO
Trac
king
erro
r of120579
b(r
ad)
Figure 6 Inclination angle tracking errors of the MWIP system byemploying TSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘120601TSMC = 120601TSMCNDO = 005)
large This is because the NDO can compensate the lumpeddisturbance in a feedforward way
In a word the proposed TSMCNDO control strategy issuperior to a conventional LQR or TSMC strategy in thebalance control of an MWIP system
5 Conclusion
The balance control of MWIP system is a challenge dueto its strong nonlinearity and underactuated feature TheTSMC seems an appropriate method because it can deal withboth the modeling uncertainties and external disturbancesIn addition a TSMC controller can guarantee the systemtrajectory converges in a finite time whereas there arefew researches about the robust finite-time control strategyapplied in an underactuated system such as an MWIP Themain contribution of this paper lies in the following
(1) We formulated the TSMC design for the balancecontrol of the underactuated MWIP system
(2) To remove the ldquochatteringrdquo caused by sliding modecontrol and further improve the control performancea new TSMCNDO strategy is proposed for control-ling the MWIP system
Together with the nonlinear disturbance observer thecontrol precision is significantly enhanced by the proposedmethod even if the boundary layer parameter 120601 is relativelylarge Simulation results demonstrate the effectiveness of theproposed methods
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was partially supported by the InternationalScience and Technology Cooperation Program of HubeiProvince ldquoJoint Research onGreen SmartWalking AssistanceRehabilitant Robotrdquo under Grant no 2012IHA00601 theFundamental Research Funds for the Central Universities(HUST) under Grant no 2013ZZGH007 and the NationalNatural Science Foundation of China under Grant 61473130and was partially supported by Program for New CenturyExcellent Talents in University (Grant no NCET-12-0214)
References
[1] D Kamen ldquoSegway Companyrdquo San Francisco Calif USA 2010httpwwwsegwaycom
[2] F Grasser A DrsquoArrigo S Colombi and A C Rufer ldquoJOE amobile inverted pendulumrdquo IEEE Transactions on IndustrialElectronics vol 49 no 1 pp 107ndash114 2002
[3] J Huang F Ding T Fukuda and T Matsuno ldquoModeling andvelocity control for a novel narrow vehicle based on mobilewheeled inverted pendulumrdquo IEEE Transactions on ControlSystems Technology vol 21 no 5 pp 1607ndash1617 2013
[4] M Sasaki N Yanagihara O Matsumoto and K KomoriyaldquoSteering control of the Personal riding-type wheeled MobilePlatform (PMP)rdquo in Proceedings of the IEEE IRSRSJ Interna-tional Conference on Intelligent Robots and Systems (IROS rsquo05)pp 1697ndash1702 August 2005
[5] A Salerno and J Angeles ldquoThe control of semi-autonomoustwo-wheeled robots undergoing large payload-variationsrdquo inProceedings of the IEEE International Conference onRobotics andAutomation pp 1740ndash1745 May 2004
[6] K Pathak J Franch and S K Agrawal ldquoVelocity and positioncontrol of a wheeled inverted pendulum by partial feedbacklinearizationrdquo IEEE Transactions on Robotics vol 21 no 3 pp505ndash513 2005
[7] C Li X Gao Q Huan et al ldquoA coaxial couple wheeled robotwith T-S fuzzy equilibrium controlrdquo Industrial Robot vol 38no 3 pp 292ndash300 2011
[8] S Jung and S S Kim ldquoControl experiment of a wheel-driven mobile inverted pendulum using neural networkrdquo IEEETransactions on Control Systems Technology vol 16 no 2 pp297ndash303 2008
[9] Z Li C Yang and L FanAdvanced Control ofWheeled InvertedPendulum Systems Springer London UK 2013
[10] V Sankaranarayanan andADMahindrakar ldquoControl of a classof underactuated mechanical systems using sliding modesrdquoIEEE Transactions on Robotics vol 25 no 2 pp 459ndash467 2009
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] J Huang Z-H Guan T Matsuno T Fukuda and K SekiyamaldquoSliding-mode velocity control of mobile-wheeled inverted-pendulum systemsrdquo IEEE Transactions on Robotics vol 26 no4 pp 750ndash758 2010
[13] M Zhihong A P Paplinski and H R Wu ldquoA robust MIMOterminal sliding mode control scheme for rigid robotic manip-ulatorsrdquo IEEE Transactions on Automatic Control vol 39 no 12pp 2464ndash2469 1994
8 Mathematical Problems in Engineering
[14] K-B Park and T Tsuji ldquoTerminal sliding mode control ofsecond-order nonlinear uncertain systemsrdquo International Jour-nal of Robust and Nonlinear Control vol 9 no 11 pp 769ndash7801999
[15] H Bayramoglu and H Komurcugil ldquoNonsingular decoupledterminal sliding-mode control for a class of fourth-ordernonlinear systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 18 no 9 pp 2527ndash2539 2013
[16] H Bayramoglu and H Komurcugil ldquoTime-varying sliding-coefficient-based terminal sliding mode control methods for aclass of fourth-order nonlinear systemsrdquo Nonlinear Dynamicsvol 73 no 3 pp 1645ndash1657 2013
[17] A Mohammadi M Tavakoli H J Marquez and FHashemzadeh ldquoNonlinear disturbance observer designfor robotic manipulatorsrdquo Control Engineering Practice vol 21no 3 pp 253ndash267 2013
[18] W-H Chen ldquoDisturbance observer based control for nonlinearsystemsrdquo IEEEASME Transactions on Mechatronics vol 9 no4 pp 706ndash710 2004
[19] J Wu J Huang Y Wang and K Xing ldquoNonlinear disturbanceobserver-based dynamic surface control for trajectory trackingof pneumatic muscle systemrdquo IEEE Transactions on ControlSystems Technology vol 22 no 2 pp 440ndash455 2014
[20] X Wei H Zhang and L Guo ldquoComposite disturbance-observer-based control and terminal sliding mode control foruncertain structural systemsrdquo International Journal of SystemsScience vol 40 no 10 pp 1009ndash1017 2009
[21] J Yang S Li and X Yu ldquoSliding-mode control for systems withmismatched uncertainties via a disturbance observerrdquo IEEETransactions on Industrial Electronics vol 60 no 1 pp 160ndash1692013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Table 2 Physical parameters of MWIP system
Parameter Value Parameter Value119898119908 290 (Kg) 119868119908 06 (Kgsdotm2)119903 0254 (m) 119887 2106 (Kg)119868119887 550 (Kgsdotm2)
119897 0267 (m)119898119887 3106 (Kg) 119868119887 650 (Kgsdotm2)119897 0317 (m) 119863119887 01 (Nsdotsm)119863119908 40 (Nsdotsm)
le minus 119896119860minus1|119878| + 119860
minus1|119878| [
1003816100381610038161003816111205911198892
1003816100381610038161003816+1003816100381610038161003816(11 + 12 cos (120579119887)) 1205911198891
1003816100381610038161003816]
le minus 119896119860minus1|119878| + 119860
minus1|119878| [111198892 + (11 + 12 cos (120579119887)) 1198891]
le minus119860minus1|119878| (119896 minus [111198892 + (11 + 12 cos (120579119887)) 1198891])
= minus 120574119860minus1|119878| lt 0
(29)
Therefore 119881 is a positive-definite function and is anegative-definite function From Remark 1 in [14] it is easilyknown that 119878(0) = 0 and it implies that 119881(0) = 0 Thusit implies that 119881(119905) equiv 0 and 119878(119905) equiv 0 This completes theproof
Theorem 3 For the internal dynamic model of the MWIPsystem (the second equation of (3)) the proposed TSMCNDOcontroller (25) guarantees that the angular velocity
120579119908 canconverge to zero
Proof Similar to Proposition 2 in [3] the second equation of(3) can be rewritten as
119876 (119905)120579119908 (119905) + 119863119908
120579119908 (119905) = 119875 (119905) (30)
where 119876(119905) = 11989811 + 11989812 cos(120579119887) gt 0 and 119863119908 gt 0 Thereforewe can know the solution of (30) is asymptotically stableFrom Theorem 2 it follows that 120579119887 and
120579119887 converge to zerowhich makes 119875(119905) finally converge to zero This results in thefinal convergence of
120579119908
4 Simulation Study
In order to verify the performance of the proposed controllerwe present some simulations in this section In the simula-tions the nominal values of system parameters come froma real MWIP-based vehicle All the parameters are given inTable 2
The external disturbance is assumed as
120591ex = 100 sin(2119905 + 120587
2
) (N sdotm) (31)
The augmenting function V(119905) is designed as a cubic polyno-mial
V (119905) =
1198860 + 1198861119905 + 11988621199052+ 11988631199053 if 0 le 119905 le 119879119891
0 if 119905 gt 119879119891
(32)
Table 3 Control parameters of TSMC and TSMCNDO strategies
Controllers ParametersTSMC 119865 = 07119865 119862 = 3 Γ = 3119863 = 03 120601TSMC = 005
TSMCNDO 120574 = 3 119888 = 3 1198891 = 1 1198892 = 1 1198881 = 1198884 = 20001198882 = 1198883 = 0 120601TSMCNDO = 005
where
1198860 = 120579119887 (0) 1198861 =120579119887 (0)
1198862 = minus3(
120579119887 (0)
1198792
119891
) minus 2(
120579119887 (0)
119879119891
)
1198863 = 2(
120579119887 (0)
1198793
119891
) + (
120579119887 (0)
1198792
119891
)
(33)
For the sliding surface 119879119891 = 1 were usedSuppose the initial conditions are given by 120579119887 =
minus10180120587 120579119887 = 0 120579119908 = 0 and
120579119908 = 0We consider the balance control of MWIP systems by
using the conventional linear quadratic regulator (LQR)the TSMC in [14] and the TSMCNDO proposed in thispaper When using the LQR controller an approximatelylinearized dynamic model was established by choosing stateas x = [1199091 1199092 1199093]
119879= [
120579119908 120579119887
120579119887]119879 The calculated
state feedback gain matrix of LQR controller is K =
[minus43141 minus9622 minus2552]In order to avoid chattering associated with the terminal
sliding mode control law we have approximated the dis-continuous sign function sgn(119878) with continuous saturationfunction sat(119878) defined as
sat (119878) =
sgn (119878) if |119878| gt 120601
119878
120601
if |119878| le 120601
120601 gt 0
(34)
where 120601 is boundary layer For applying the two controlstrategies to the subsystem (20) the determined parametersof all controllers are listed in Table 3
The balance control simulation results of the MWIPsystem with uncertainties and disturbances using the LQRthe TSMCgiven by [14] and the TSMCNDOproposed in thispaper are shown in Figures 2 3 4 and 5
Figure 6 shows the inclination angle tracking errors of theMWIP system considering uncertainties and disturbancesusing the two control strategies
From Figures 2ndash6 the following turn out
(1) The control performance of LQR controller seemsworst because it is not designed to deal with themodeluncertainties and external disturbance
(2) Even if there are model uncertainties and externaldisturbance the inclination angle angular velocityand wheel rotation velocity of the MWIP system willfinally converge when either TSMC or TSMCNDOcontroller is employed
6 Mathematical Problems in Engineering
0 5 10 15 20 25 30minus02
minus015
minus01
minus005
0
005
01
015
02
Time (s)
LQRTSMCTSMCNDO
120579b
(rad
)
Figure 2 Inclination angles of the MWIP system by employingLQR TSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘120601TSMC = 120601TSMCNDO = 005)
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus04
minus03
minus02
minus01
0
01
02
03
04
d120579bdt
(rad
s)
Figure 3 Inclination angle velocities of the MWIP system byemploying LQR TSMC and TSMCNDO control strategies (120579119887(0) =minus10∘ 120601TSMC = 120601TSMCNDO = 005)
(3) The control performance of the MWIP system byusing TSMCNDO control strategy is better than theone by using TSMC control strategy The effect ofexternal disturbance on the MWIP system is signif-icantly reduced by using TSMCNDO control strategywhile it still remains when using a conventionalTSMC controller
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus6
minus5
minus4
minus3
minus2
minus1
0
1
2
3
d120579wdt
(rad
s)
Figure 4 Wheel rotation velocities of the MWIP system byemploying LQR TSMC and TSMCNDO control strategies (120579119887(0) =minus10∘ 120601TSMC = 120601TSMCNDO = 005)
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus200
minus150
minus100
minus50
0
50
100
150
200
u(N
middotm)
Figure 5 Control inputs of the MWIP system by employing LQRTSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘ 120601TSMC =
120601TSMCNDO = 005)
In the case of TSMC strategy the control precision ofthe system is mainly related to parameter 120601TSMC In order toimprove the control precision of the MWIP system usuallysmaller value of the parameter 120601TSMC should be chosenHowever the chattering will increase as the value of 120601TSMCdecreases On the other hand when using the TSMCNDOstrategy a satisfactory control performance can be easilyachieved even if the value of parameter 120601TSMCNDO is relatively
Mathematical Problems in Engineering 7
5 10 15 20 25 30Time (s)
minus0015
minus001
minus0005
0
0005
001
0015
TSMCTSMCNDO
Trac
king
erro
r of120579
b(r
ad)
Figure 6 Inclination angle tracking errors of the MWIP system byemploying TSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘120601TSMC = 120601TSMCNDO = 005)
large This is because the NDO can compensate the lumpeddisturbance in a feedforward way
In a word the proposed TSMCNDO control strategy issuperior to a conventional LQR or TSMC strategy in thebalance control of an MWIP system
5 Conclusion
The balance control of MWIP system is a challenge dueto its strong nonlinearity and underactuated feature TheTSMC seems an appropriate method because it can deal withboth the modeling uncertainties and external disturbancesIn addition a TSMC controller can guarantee the systemtrajectory converges in a finite time whereas there arefew researches about the robust finite-time control strategyapplied in an underactuated system such as an MWIP Themain contribution of this paper lies in the following
(1) We formulated the TSMC design for the balancecontrol of the underactuated MWIP system
(2) To remove the ldquochatteringrdquo caused by sliding modecontrol and further improve the control performancea new TSMCNDO strategy is proposed for control-ling the MWIP system
Together with the nonlinear disturbance observer thecontrol precision is significantly enhanced by the proposedmethod even if the boundary layer parameter 120601 is relativelylarge Simulation results demonstrate the effectiveness of theproposed methods
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was partially supported by the InternationalScience and Technology Cooperation Program of HubeiProvince ldquoJoint Research onGreen SmartWalking AssistanceRehabilitant Robotrdquo under Grant no 2012IHA00601 theFundamental Research Funds for the Central Universities(HUST) under Grant no 2013ZZGH007 and the NationalNatural Science Foundation of China under Grant 61473130and was partially supported by Program for New CenturyExcellent Talents in University (Grant no NCET-12-0214)
References
[1] D Kamen ldquoSegway Companyrdquo San Francisco Calif USA 2010httpwwwsegwaycom
[2] F Grasser A DrsquoArrigo S Colombi and A C Rufer ldquoJOE amobile inverted pendulumrdquo IEEE Transactions on IndustrialElectronics vol 49 no 1 pp 107ndash114 2002
[3] J Huang F Ding T Fukuda and T Matsuno ldquoModeling andvelocity control for a novel narrow vehicle based on mobilewheeled inverted pendulumrdquo IEEE Transactions on ControlSystems Technology vol 21 no 5 pp 1607ndash1617 2013
[4] M Sasaki N Yanagihara O Matsumoto and K KomoriyaldquoSteering control of the Personal riding-type wheeled MobilePlatform (PMP)rdquo in Proceedings of the IEEE IRSRSJ Interna-tional Conference on Intelligent Robots and Systems (IROS rsquo05)pp 1697ndash1702 August 2005
[5] A Salerno and J Angeles ldquoThe control of semi-autonomoustwo-wheeled robots undergoing large payload-variationsrdquo inProceedings of the IEEE International Conference onRobotics andAutomation pp 1740ndash1745 May 2004
[6] K Pathak J Franch and S K Agrawal ldquoVelocity and positioncontrol of a wheeled inverted pendulum by partial feedbacklinearizationrdquo IEEE Transactions on Robotics vol 21 no 3 pp505ndash513 2005
[7] C Li X Gao Q Huan et al ldquoA coaxial couple wheeled robotwith T-S fuzzy equilibrium controlrdquo Industrial Robot vol 38no 3 pp 292ndash300 2011
[8] S Jung and S S Kim ldquoControl experiment of a wheel-driven mobile inverted pendulum using neural networkrdquo IEEETransactions on Control Systems Technology vol 16 no 2 pp297ndash303 2008
[9] Z Li C Yang and L FanAdvanced Control ofWheeled InvertedPendulum Systems Springer London UK 2013
[10] V Sankaranarayanan andADMahindrakar ldquoControl of a classof underactuated mechanical systems using sliding modesrdquoIEEE Transactions on Robotics vol 25 no 2 pp 459ndash467 2009
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] J Huang Z-H Guan T Matsuno T Fukuda and K SekiyamaldquoSliding-mode velocity control of mobile-wheeled inverted-pendulum systemsrdquo IEEE Transactions on Robotics vol 26 no4 pp 750ndash758 2010
[13] M Zhihong A P Paplinski and H R Wu ldquoA robust MIMOterminal sliding mode control scheme for rigid robotic manip-ulatorsrdquo IEEE Transactions on Automatic Control vol 39 no 12pp 2464ndash2469 1994
8 Mathematical Problems in Engineering
[14] K-B Park and T Tsuji ldquoTerminal sliding mode control ofsecond-order nonlinear uncertain systemsrdquo International Jour-nal of Robust and Nonlinear Control vol 9 no 11 pp 769ndash7801999
[15] H Bayramoglu and H Komurcugil ldquoNonsingular decoupledterminal sliding-mode control for a class of fourth-ordernonlinear systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 18 no 9 pp 2527ndash2539 2013
[16] H Bayramoglu and H Komurcugil ldquoTime-varying sliding-coefficient-based terminal sliding mode control methods for aclass of fourth-order nonlinear systemsrdquo Nonlinear Dynamicsvol 73 no 3 pp 1645ndash1657 2013
[17] A Mohammadi M Tavakoli H J Marquez and FHashemzadeh ldquoNonlinear disturbance observer designfor robotic manipulatorsrdquo Control Engineering Practice vol 21no 3 pp 253ndash267 2013
[18] W-H Chen ldquoDisturbance observer based control for nonlinearsystemsrdquo IEEEASME Transactions on Mechatronics vol 9 no4 pp 706ndash710 2004
[19] J Wu J Huang Y Wang and K Xing ldquoNonlinear disturbanceobserver-based dynamic surface control for trajectory trackingof pneumatic muscle systemrdquo IEEE Transactions on ControlSystems Technology vol 22 no 2 pp 440ndash455 2014
[20] X Wei H Zhang and L Guo ldquoComposite disturbance-observer-based control and terminal sliding mode control foruncertain structural systemsrdquo International Journal of SystemsScience vol 40 no 10 pp 1009ndash1017 2009
[21] J Yang S Li and X Yu ldquoSliding-mode control for systems withmismatched uncertainties via a disturbance observerrdquo IEEETransactions on Industrial Electronics vol 60 no 1 pp 160ndash1692013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
0 5 10 15 20 25 30minus02
minus015
minus01
minus005
0
005
01
015
02
Time (s)
LQRTSMCTSMCNDO
120579b
(rad
)
Figure 2 Inclination angles of the MWIP system by employingLQR TSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘120601TSMC = 120601TSMCNDO = 005)
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus04
minus03
minus02
minus01
0
01
02
03
04
d120579bdt
(rad
s)
Figure 3 Inclination angle velocities of the MWIP system byemploying LQR TSMC and TSMCNDO control strategies (120579119887(0) =minus10∘ 120601TSMC = 120601TSMCNDO = 005)
(3) The control performance of the MWIP system byusing TSMCNDO control strategy is better than theone by using TSMC control strategy The effect ofexternal disturbance on the MWIP system is signif-icantly reduced by using TSMCNDO control strategywhile it still remains when using a conventionalTSMC controller
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus6
minus5
minus4
minus3
minus2
minus1
0
1
2
3
d120579wdt
(rad
s)
Figure 4 Wheel rotation velocities of the MWIP system byemploying LQR TSMC and TSMCNDO control strategies (120579119887(0) =minus10∘ 120601TSMC = 120601TSMCNDO = 005)
0 5 10 15 20 25 30Time (s)
LQRTSMCTSMCNDO
minus200
minus150
minus100
minus50
0
50
100
150
200
u(N
middotm)
Figure 5 Control inputs of the MWIP system by employing LQRTSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘ 120601TSMC =
120601TSMCNDO = 005)
In the case of TSMC strategy the control precision ofthe system is mainly related to parameter 120601TSMC In order toimprove the control precision of the MWIP system usuallysmaller value of the parameter 120601TSMC should be chosenHowever the chattering will increase as the value of 120601TSMCdecreases On the other hand when using the TSMCNDOstrategy a satisfactory control performance can be easilyachieved even if the value of parameter 120601TSMCNDO is relatively
Mathematical Problems in Engineering 7
5 10 15 20 25 30Time (s)
minus0015
minus001
minus0005
0
0005
001
0015
TSMCTSMCNDO
Trac
king
erro
r of120579
b(r
ad)
Figure 6 Inclination angle tracking errors of the MWIP system byemploying TSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘120601TSMC = 120601TSMCNDO = 005)
large This is because the NDO can compensate the lumpeddisturbance in a feedforward way
In a word the proposed TSMCNDO control strategy issuperior to a conventional LQR or TSMC strategy in thebalance control of an MWIP system
5 Conclusion
The balance control of MWIP system is a challenge dueto its strong nonlinearity and underactuated feature TheTSMC seems an appropriate method because it can deal withboth the modeling uncertainties and external disturbancesIn addition a TSMC controller can guarantee the systemtrajectory converges in a finite time whereas there arefew researches about the robust finite-time control strategyapplied in an underactuated system such as an MWIP Themain contribution of this paper lies in the following
(1) We formulated the TSMC design for the balancecontrol of the underactuated MWIP system
(2) To remove the ldquochatteringrdquo caused by sliding modecontrol and further improve the control performancea new TSMCNDO strategy is proposed for control-ling the MWIP system
Together with the nonlinear disturbance observer thecontrol precision is significantly enhanced by the proposedmethod even if the boundary layer parameter 120601 is relativelylarge Simulation results demonstrate the effectiveness of theproposed methods
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was partially supported by the InternationalScience and Technology Cooperation Program of HubeiProvince ldquoJoint Research onGreen SmartWalking AssistanceRehabilitant Robotrdquo under Grant no 2012IHA00601 theFundamental Research Funds for the Central Universities(HUST) under Grant no 2013ZZGH007 and the NationalNatural Science Foundation of China under Grant 61473130and was partially supported by Program for New CenturyExcellent Talents in University (Grant no NCET-12-0214)
References
[1] D Kamen ldquoSegway Companyrdquo San Francisco Calif USA 2010httpwwwsegwaycom
[2] F Grasser A DrsquoArrigo S Colombi and A C Rufer ldquoJOE amobile inverted pendulumrdquo IEEE Transactions on IndustrialElectronics vol 49 no 1 pp 107ndash114 2002
[3] J Huang F Ding T Fukuda and T Matsuno ldquoModeling andvelocity control for a novel narrow vehicle based on mobilewheeled inverted pendulumrdquo IEEE Transactions on ControlSystems Technology vol 21 no 5 pp 1607ndash1617 2013
[4] M Sasaki N Yanagihara O Matsumoto and K KomoriyaldquoSteering control of the Personal riding-type wheeled MobilePlatform (PMP)rdquo in Proceedings of the IEEE IRSRSJ Interna-tional Conference on Intelligent Robots and Systems (IROS rsquo05)pp 1697ndash1702 August 2005
[5] A Salerno and J Angeles ldquoThe control of semi-autonomoustwo-wheeled robots undergoing large payload-variationsrdquo inProceedings of the IEEE International Conference onRobotics andAutomation pp 1740ndash1745 May 2004
[6] K Pathak J Franch and S K Agrawal ldquoVelocity and positioncontrol of a wheeled inverted pendulum by partial feedbacklinearizationrdquo IEEE Transactions on Robotics vol 21 no 3 pp505ndash513 2005
[7] C Li X Gao Q Huan et al ldquoA coaxial couple wheeled robotwith T-S fuzzy equilibrium controlrdquo Industrial Robot vol 38no 3 pp 292ndash300 2011
[8] S Jung and S S Kim ldquoControl experiment of a wheel-driven mobile inverted pendulum using neural networkrdquo IEEETransactions on Control Systems Technology vol 16 no 2 pp297ndash303 2008
[9] Z Li C Yang and L FanAdvanced Control ofWheeled InvertedPendulum Systems Springer London UK 2013
[10] V Sankaranarayanan andADMahindrakar ldquoControl of a classof underactuated mechanical systems using sliding modesrdquoIEEE Transactions on Robotics vol 25 no 2 pp 459ndash467 2009
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] J Huang Z-H Guan T Matsuno T Fukuda and K SekiyamaldquoSliding-mode velocity control of mobile-wheeled inverted-pendulum systemsrdquo IEEE Transactions on Robotics vol 26 no4 pp 750ndash758 2010
[13] M Zhihong A P Paplinski and H R Wu ldquoA robust MIMOterminal sliding mode control scheme for rigid robotic manip-ulatorsrdquo IEEE Transactions on Automatic Control vol 39 no 12pp 2464ndash2469 1994
8 Mathematical Problems in Engineering
[14] K-B Park and T Tsuji ldquoTerminal sliding mode control ofsecond-order nonlinear uncertain systemsrdquo International Jour-nal of Robust and Nonlinear Control vol 9 no 11 pp 769ndash7801999
[15] H Bayramoglu and H Komurcugil ldquoNonsingular decoupledterminal sliding-mode control for a class of fourth-ordernonlinear systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 18 no 9 pp 2527ndash2539 2013
[16] H Bayramoglu and H Komurcugil ldquoTime-varying sliding-coefficient-based terminal sliding mode control methods for aclass of fourth-order nonlinear systemsrdquo Nonlinear Dynamicsvol 73 no 3 pp 1645ndash1657 2013
[17] A Mohammadi M Tavakoli H J Marquez and FHashemzadeh ldquoNonlinear disturbance observer designfor robotic manipulatorsrdquo Control Engineering Practice vol 21no 3 pp 253ndash267 2013
[18] W-H Chen ldquoDisturbance observer based control for nonlinearsystemsrdquo IEEEASME Transactions on Mechatronics vol 9 no4 pp 706ndash710 2004
[19] J Wu J Huang Y Wang and K Xing ldquoNonlinear disturbanceobserver-based dynamic surface control for trajectory trackingof pneumatic muscle systemrdquo IEEE Transactions on ControlSystems Technology vol 22 no 2 pp 440ndash455 2014
[20] X Wei H Zhang and L Guo ldquoComposite disturbance-observer-based control and terminal sliding mode control foruncertain structural systemsrdquo International Journal of SystemsScience vol 40 no 10 pp 1009ndash1017 2009
[21] J Yang S Li and X Yu ldquoSliding-mode control for systems withmismatched uncertainties via a disturbance observerrdquo IEEETransactions on Industrial Electronics vol 60 no 1 pp 160ndash1692013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
5 10 15 20 25 30Time (s)
minus0015
minus001
minus0005
0
0005
001
0015
TSMCTSMCNDO
Trac
king
erro
r of120579
b(r
ad)
Figure 6 Inclination angle tracking errors of the MWIP system byemploying TSMC and TSMCNDO control strategies (120579119887(0) = minus10
∘120601TSMC = 120601TSMCNDO = 005)
large This is because the NDO can compensate the lumpeddisturbance in a feedforward way
In a word the proposed TSMCNDO control strategy issuperior to a conventional LQR or TSMC strategy in thebalance control of an MWIP system
5 Conclusion
The balance control of MWIP system is a challenge dueto its strong nonlinearity and underactuated feature TheTSMC seems an appropriate method because it can deal withboth the modeling uncertainties and external disturbancesIn addition a TSMC controller can guarantee the systemtrajectory converges in a finite time whereas there arefew researches about the robust finite-time control strategyapplied in an underactuated system such as an MWIP Themain contribution of this paper lies in the following
(1) We formulated the TSMC design for the balancecontrol of the underactuated MWIP system
(2) To remove the ldquochatteringrdquo caused by sliding modecontrol and further improve the control performancea new TSMCNDO strategy is proposed for control-ling the MWIP system
Together with the nonlinear disturbance observer thecontrol precision is significantly enhanced by the proposedmethod even if the boundary layer parameter 120601 is relativelylarge Simulation results demonstrate the effectiveness of theproposed methods
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was partially supported by the InternationalScience and Technology Cooperation Program of HubeiProvince ldquoJoint Research onGreen SmartWalking AssistanceRehabilitant Robotrdquo under Grant no 2012IHA00601 theFundamental Research Funds for the Central Universities(HUST) under Grant no 2013ZZGH007 and the NationalNatural Science Foundation of China under Grant 61473130and was partially supported by Program for New CenturyExcellent Talents in University (Grant no NCET-12-0214)
References
[1] D Kamen ldquoSegway Companyrdquo San Francisco Calif USA 2010httpwwwsegwaycom
[2] F Grasser A DrsquoArrigo S Colombi and A C Rufer ldquoJOE amobile inverted pendulumrdquo IEEE Transactions on IndustrialElectronics vol 49 no 1 pp 107ndash114 2002
[3] J Huang F Ding T Fukuda and T Matsuno ldquoModeling andvelocity control for a novel narrow vehicle based on mobilewheeled inverted pendulumrdquo IEEE Transactions on ControlSystems Technology vol 21 no 5 pp 1607ndash1617 2013
[4] M Sasaki N Yanagihara O Matsumoto and K KomoriyaldquoSteering control of the Personal riding-type wheeled MobilePlatform (PMP)rdquo in Proceedings of the IEEE IRSRSJ Interna-tional Conference on Intelligent Robots and Systems (IROS rsquo05)pp 1697ndash1702 August 2005
[5] A Salerno and J Angeles ldquoThe control of semi-autonomoustwo-wheeled robots undergoing large payload-variationsrdquo inProceedings of the IEEE International Conference onRobotics andAutomation pp 1740ndash1745 May 2004
[6] K Pathak J Franch and S K Agrawal ldquoVelocity and positioncontrol of a wheeled inverted pendulum by partial feedbacklinearizationrdquo IEEE Transactions on Robotics vol 21 no 3 pp505ndash513 2005
[7] C Li X Gao Q Huan et al ldquoA coaxial couple wheeled robotwith T-S fuzzy equilibrium controlrdquo Industrial Robot vol 38no 3 pp 292ndash300 2011
[8] S Jung and S S Kim ldquoControl experiment of a wheel-driven mobile inverted pendulum using neural networkrdquo IEEETransactions on Control Systems Technology vol 16 no 2 pp297ndash303 2008
[9] Z Li C Yang and L FanAdvanced Control ofWheeled InvertedPendulum Systems Springer London UK 2013
[10] V Sankaranarayanan andADMahindrakar ldquoControl of a classof underactuated mechanical systems using sliding modesrdquoIEEE Transactions on Robotics vol 25 no 2 pp 459ndash467 2009
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] J Huang Z-H Guan T Matsuno T Fukuda and K SekiyamaldquoSliding-mode velocity control of mobile-wheeled inverted-pendulum systemsrdquo IEEE Transactions on Robotics vol 26 no4 pp 750ndash758 2010
[13] M Zhihong A P Paplinski and H R Wu ldquoA robust MIMOterminal sliding mode control scheme for rigid robotic manip-ulatorsrdquo IEEE Transactions on Automatic Control vol 39 no 12pp 2464ndash2469 1994
8 Mathematical Problems in Engineering
[14] K-B Park and T Tsuji ldquoTerminal sliding mode control ofsecond-order nonlinear uncertain systemsrdquo International Jour-nal of Robust and Nonlinear Control vol 9 no 11 pp 769ndash7801999
[15] H Bayramoglu and H Komurcugil ldquoNonsingular decoupledterminal sliding-mode control for a class of fourth-ordernonlinear systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 18 no 9 pp 2527ndash2539 2013
[16] H Bayramoglu and H Komurcugil ldquoTime-varying sliding-coefficient-based terminal sliding mode control methods for aclass of fourth-order nonlinear systemsrdquo Nonlinear Dynamicsvol 73 no 3 pp 1645ndash1657 2013
[17] A Mohammadi M Tavakoli H J Marquez and FHashemzadeh ldquoNonlinear disturbance observer designfor robotic manipulatorsrdquo Control Engineering Practice vol 21no 3 pp 253ndash267 2013
[18] W-H Chen ldquoDisturbance observer based control for nonlinearsystemsrdquo IEEEASME Transactions on Mechatronics vol 9 no4 pp 706ndash710 2004
[19] J Wu J Huang Y Wang and K Xing ldquoNonlinear disturbanceobserver-based dynamic surface control for trajectory trackingof pneumatic muscle systemrdquo IEEE Transactions on ControlSystems Technology vol 22 no 2 pp 440ndash455 2014
[20] X Wei H Zhang and L Guo ldquoComposite disturbance-observer-based control and terminal sliding mode control foruncertain structural systemsrdquo International Journal of SystemsScience vol 40 no 10 pp 1009ndash1017 2009
[21] J Yang S Li and X Yu ldquoSliding-mode control for systems withmismatched uncertainties via a disturbance observerrdquo IEEETransactions on Industrial Electronics vol 60 no 1 pp 160ndash1692013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
[14] K-B Park and T Tsuji ldquoTerminal sliding mode control ofsecond-order nonlinear uncertain systemsrdquo International Jour-nal of Robust and Nonlinear Control vol 9 no 11 pp 769ndash7801999
[15] H Bayramoglu and H Komurcugil ldquoNonsingular decoupledterminal sliding-mode control for a class of fourth-ordernonlinear systemsrdquo Communications in Nonlinear Science andNumerical Simulation vol 18 no 9 pp 2527ndash2539 2013
[16] H Bayramoglu and H Komurcugil ldquoTime-varying sliding-coefficient-based terminal sliding mode control methods for aclass of fourth-order nonlinear systemsrdquo Nonlinear Dynamicsvol 73 no 3 pp 1645ndash1657 2013
[17] A Mohammadi M Tavakoli H J Marquez and FHashemzadeh ldquoNonlinear disturbance observer designfor robotic manipulatorsrdquo Control Engineering Practice vol 21no 3 pp 253ndash267 2013
[18] W-H Chen ldquoDisturbance observer based control for nonlinearsystemsrdquo IEEEASME Transactions on Mechatronics vol 9 no4 pp 706ndash710 2004
[19] J Wu J Huang Y Wang and K Xing ldquoNonlinear disturbanceobserver-based dynamic surface control for trajectory trackingof pneumatic muscle systemrdquo IEEE Transactions on ControlSystems Technology vol 22 no 2 pp 440ndash455 2014
[20] X Wei H Zhang and L Guo ldquoComposite disturbance-observer-based control and terminal sliding mode control foruncertain structural systemsrdquo International Journal of SystemsScience vol 40 no 10 pp 1009ndash1017 2009
[21] J Yang S Li and X Yu ldquoSliding-mode control for systems withmismatched uncertainties via a disturbance observerrdquo IEEETransactions on Industrial Electronics vol 60 no 1 pp 160ndash1692013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of