
REGULACIJA HITROSTI VRTENJA IN KOTA ZASUKA … · Tabela 2.7: Merjenje toka in vrtljajev in...
66
UNIVERZA V MARIBORU FAKULTETA ZA ELEKTROTEHNIKO, RAČUNALNIŠTVO IN INFORMATIKO Danilo Lebar REGULACIJA HITROSTI VRTENJA IN KOTA ZASUKA ENOSMERNEGA MOTORJA S TRAJNIMI MAGNETI Diplomsko delo Maribor, avgust 2016
Transcript of REGULACIJA HITROSTI VRTENJA IN KOTA ZASUKA … · Tabela 2.7: Merjenje toka in vrtljajev in...
UNIVERZA V MARIBORU
FAKULTETA ZA ELEKTROTEHNIKO,
RAČUNALNIŠTVO IN INFORMATIKO
Danilo Lebar
REGULACIJA HITROSTI VRTENJA IN KOTA
ZASUKA ENOSMERNEGA MOTORJA S
TRAJNIMI MAGNETI
Diplomsko delo
Maribor, avgust 2016
REGULACIJA HITROSTI VRTENJA IN KOTA
ZASUKA ENOSMERNEGA MOTORJA S
TRAJNIMI MAGNETI
Diplomsko delo
Študent: Danilo Lebar
Študijski program: Univerzitetni študijski program Elektrotehnika
Smer: Močnostna elektrotehnika
Mentor: izr. prof. dr. Boštjan Polajžer
Somentor: izr. prof. dr. Jožef Ritonja

i

ii
ZAHVALA
Iskreno se zahvaljujem mentorju izr. prof. dr.
Boštjanu Polajžerju in somentorju izr. prof. dr. Jožefu
Ritonji za strokovne nasvete in pomoč.
Zahvaljujem se tudi g. Zlatku Strelcu za pomoč pri
izvajanju laboratorijskih meritev.
iii
REGULACIJA HITROSTI VRTENJA IN KOTA
ZASUKA ENOSMERNEGA MOTORJA S
TRAJNIMI MAGNETI
Ključne besede: enosmerni motor s trajnimi magneti, regulacija hitrosti in kota zasuka
enosmernega motorja, PI regulator, industrijski krmilnik
UDK: 621.313.2(043.2)
Povzetek:
V diplomski nalogi so predstavljeni postopki za določitev parametrov dinamičnega modela
enosmernega motorja s trajnimi magneti in postopek določitve parametrov regulatorja
hitrosti vrtenja in kota zasuka. S primerjavo med simulacijskimi in izmerjenimi časovnimi
odzivi hitrosti vrtenja in rotorskega toka je izvedena verifikacija modela obravnavanega
motorja. Prikazani so tudi rezultati simulacijske analize regulacije hitrosti vrtenja in kota
zasuka, kakor tudi rezultati preizkusa regulacije, ki je bila izvedena z industrijskim
krmilnikom SIEMENS.
iv
CONTROL OF THE SPEED OF ROTATION AND
ANGLE OF ROTATION OF A PERMANENT
MAGNET DC MOTOR
Key words: a permanent magnet DC motor, control of the speed and angle of rotation, PI
controller, industrial controller
UDK: 621.313.2(043.2)
Abstract:
The thesis presents the procedures for determining the parameters of the dynamic model of
a DC motor with permanent magnets, and the process of determining the parameters of the
controller for rotation speed and rotation angle. The verification of the model of the
discussed motor is carried out by comparing the simulation and measured time responses of
rotation speed and rotor current. The thesis also presents the results of the simulation
analysis of control of rotation speed and angle, as well as the results of the test of control
carried out with an industrial controller SIEMENS.
v
Kazalo:
1 Uvod ............................................................................................................................. 1
2 Matematični model in določitev parametrov modela................................................... 2
2.1 Določitev rotorske upornosti in induktivnosti .................................................... 2
2.2 Določitev konstante 𝐾𝐸 ..................................................................................... 10
2.3 Določitev konstante 𝐾𝑇 ..................................................................................... 11
2.4 Določitev Coulombovega trenja in koeficienta viskoznega trenja ................... 13
2.5 Določitev vztrajnostnega momenta .................................................................. 16
2.6 Primerjava odzivov motorja in njegovega modela ........................................... 20
3 Načrtovanje regulacije in analiza ............................................................................... 27
3.1 Načrtovanje regulatorja hitrosti vrtenja ............................................................ 27
3.2 Načrtovanje regulatorja kota zasuka ................................................................. 30
4 Analiza regulacije....................................................................................................... 33
4.1 Regulacija hitrosti vrtenja ................................................................................. 33
4.2 Regulator kota zasuka ....................................................................................... 39
5 Izvedba regulacije z industrijskim krmilnikom.......................................................... 43
5.1 Sistem s krmilnikom Siemens S7-314 IFM ...................................................... 43
5.2 SIMATIC Step 7 ............................................................................................... 43
5.3 Uporabljeni ukazi v programskem jeziku STEP 7 ........................................... 44
vi
5.4 Določanje parametrov diskretnega PI-regulatorja ............................................ 44
5.5 Rezultati ............................................................................................................ 45
6 Zaključek .................................................................................................................... 49
7 Navajanje virov .......................................................................................................... 50
7.1 Knjige ............................................................................................................... 50
7.2 Internetni viri .................................................................................................... 50

vii
Kazalo slik:
Slika 2.1: Meritve pri zavrtem rotorju ................................................................................... 5
Slika 2.2: Različni začetni položaji rotorja ............................................................................ 5
Slika 2.3: Časovni potek rotorskega toka iA pri stopnični spremembi rotorske napetosti
iz nič na 1,5 V. .............................................................................................................. 6
Slika 2.4: Časovni potek rotorskega toka iA pri stopnični spremembi rotorske napetosti
iz nič na 3 V .................................................................................................................. 6
Slika 2.5: Časovni potek rotorskega toka iA pri stopnični spremembi rotorske napetosti
iz nič na 4,5 V. .............................................................................................................. 7
Slika 2.6: Časovni potek rotorskega toka iA pri stopnični spremembi rotorske napetosti
iz nič na 6 V. ................................................................................................................. 7
Slika 2.7: Časovni potek rotorskega toka iA pri različnih stopničnih spremembah rotorske
napetosti v začetnem položaju rotorja 4. ........................................................................ 8
Slika 2.8: Odziv toka iA na stopnično spremembo napetosti uA pri zavrtem rotorju ............. 9
Slika 2.9: Meritev konstante 𝐾𝑇 .......................................................................................... 12
Slika 2.10: Karakteristika trenja Tt (ω) ................................................................................ 15
Slika 2.11: Časovni potek toka iA in hitrosti ω .................................................................... 17
Slika 2.12: Iztečni preizkus za negativno hitrost ................................................................. 19
Slika 2.13: Iztečni preizkus za pozitivno hitrost.................................................................. 19
Slika 2.14: Model enosmernega motorja s trajnimi magneti v programskem okolju
Simulink ....................................................................................................................... 20
Slika 2.15: Odziv toka iA in hitrosti ω pri stopnični spremembi napetosti uA iz 0 na +5
in -5 V........................................................................................................................... 21
Slika 2.16: Odziv toka iA in hitrosti ω pri stopnični spremembi napetosti uA iz 0 na +7,5
in -7,5 V....................................................................................................................... 21
Slika 2.17: Odziv toka iA in hitrosti ω pri stopnični spremembi napetosti uA iz 0 na +10
in -10 V......................................................................................................................... 22
Slika 2.18: Odziv toka iA in hitrosti ω pri stopnični spremembi napetosti uA iz 0 na +10
in -10 V in KV = 0,0313 Vs/rad. ................................................................................... 22
Slika 2.19: Izmerjeni odziv toka pri bremenitvi in spremembi hitrosti iz 1150 na 610
vrt/min .......................................................................................................................... 23
viii
Slika 2.20: Sprememba hitrosti pri vklopu bremena ........................................................... 24
Slika 2.21: Izmerjeni odziv toka pri bremenitvi in spremembi hitrosti iz -1200 na -655
vrt/min .......................................................................................................................... 24
Slika 2.22: Sprememba hitrosti pri vklopu bremena pri nasprotni smeri vrtenja ................ 25
Slika 2.23: Sprememba hitrosti pri vklopu bremena ........................................................... 26
Slika 2.24: Sprememba hitrosti pri vklopu bremena pri nasprotni smeri vrtenja ................ 26
Slika 3.1: Amplitudni in fazni potek v Bodejevem diagramu ............................................. 29
Slika 3.2: Stopnični odziv reguliranega sistema .................................................................. 30
Slika 3.3: Amplitudni in fazni potek v Bodejevem diagramu ............................................. 31
Slika 3.4: Stopnični odziv reguliranega sistema .................................................................. 32
Slika 4.1: Model regulacije hitrosti enosmernega stroja s trajnimi magneti z dodanim
Coulombovim trenjem, omejevalnikom napetosti in členi za zakasnitev .................... 33
Slika 4.2: Odzivi na stopnično spremembo referenčne hitrosti nR=500 vrt/min ................. 34
Slika 4.3: Odzivi na stopnično spremembo referenčne hitrosti nR=1000 vrt/min ............... 34
Slika 4.4: Odzivi na stopnično spremembo referenčne hitrosti nR=500 vrt/min brez
upoštevanja Coulombovega trenja ............................................................................... 35
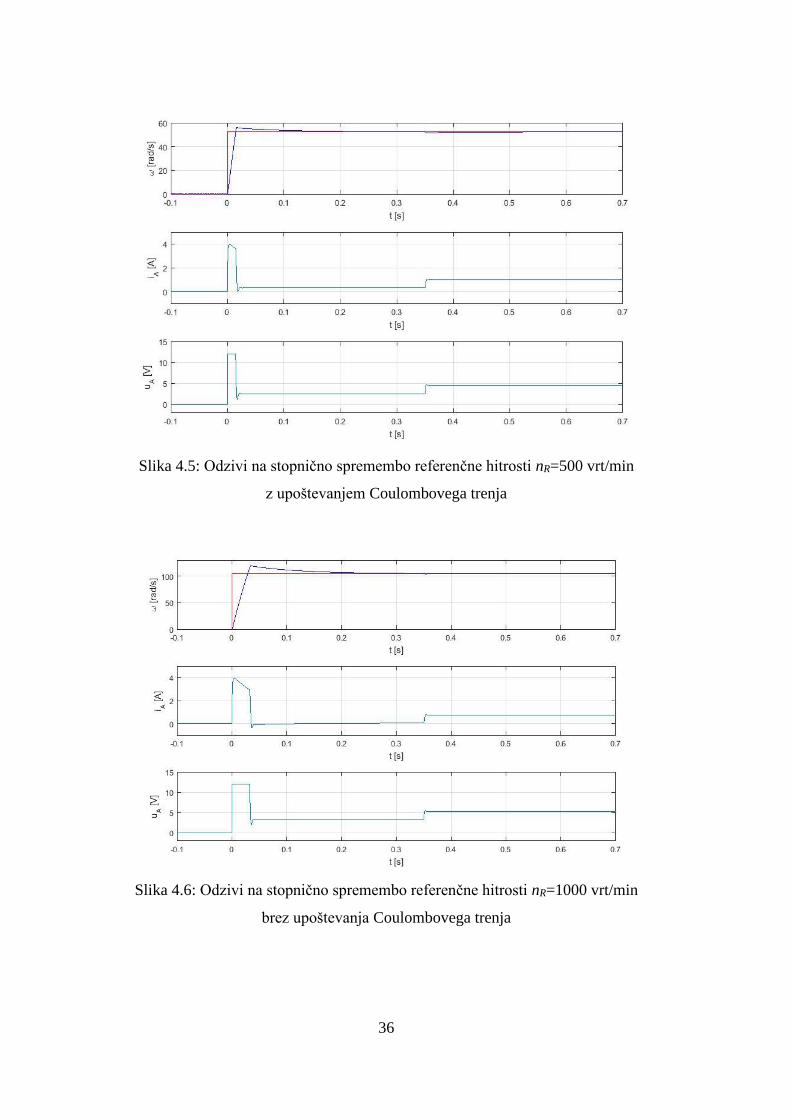
Slika 4.5: Odzivi na stopnično spremembo referenčne hitrosti nR=500 vrt/min z
upoštevanjem Coulombovega trenja ............................................................................ 36
Slika 4.6: Odzivi na stopnično spremembo referenčne hitrosti nR=1000 vrt/min brez
upoštevanja Coulombovega trenja ............................................................................... 36
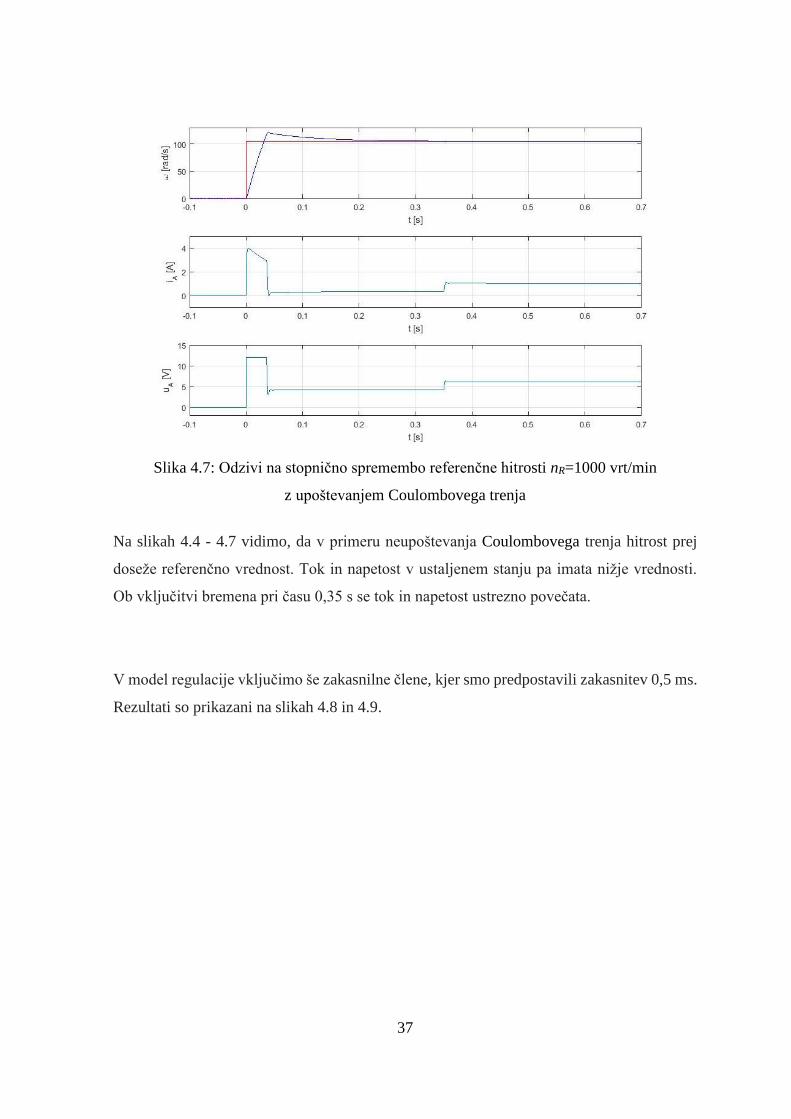
Slika 4.7: Odzivi na stopnično spremembo referenčne hitrosti nR=1000 vrt/min z
upoštevanjem Coulombovega trenja ............................................................................ 37
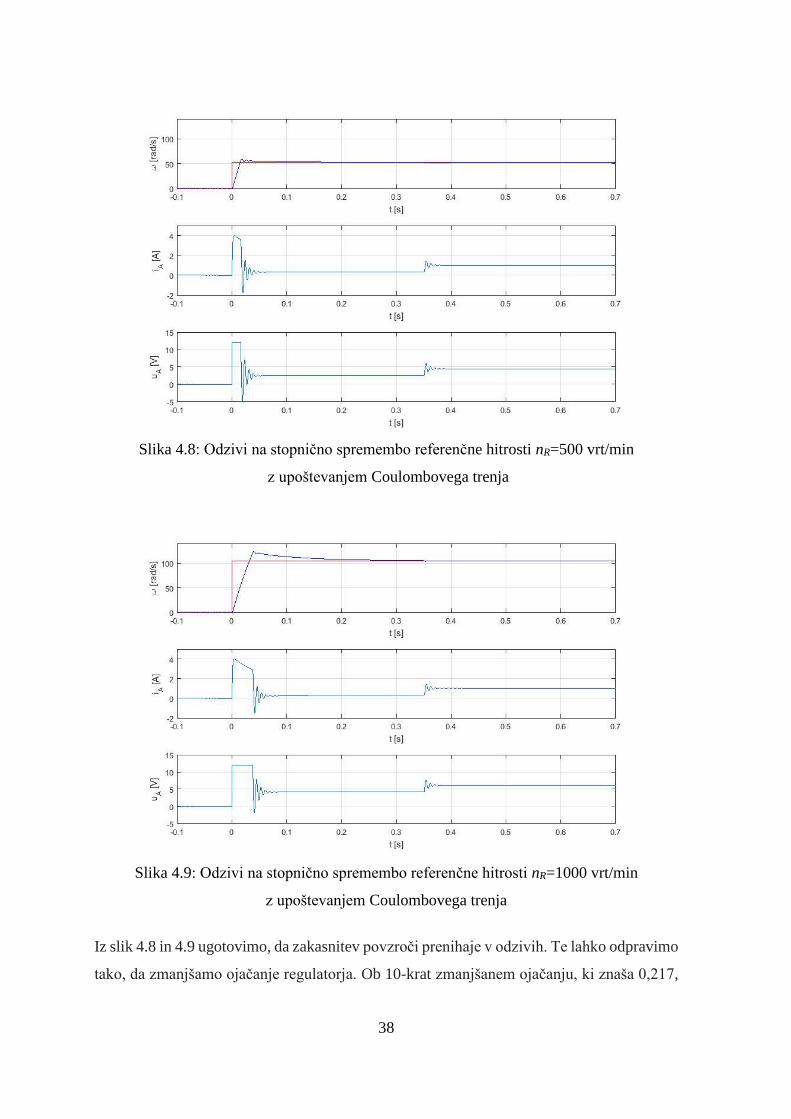
Slika 4.8: Odzivi na stopnično spremembo referenčne hitrosti nR=500 vrt/min z
upoštevanjem Coulombovega trenja ............................................................................ 38
Slika 4.9: Odzivi na stopnično spremembo referenčne hitrosti nR=1000 vrt/min z
upoštevanjem Coulombovega trenja ............................................................................ 38
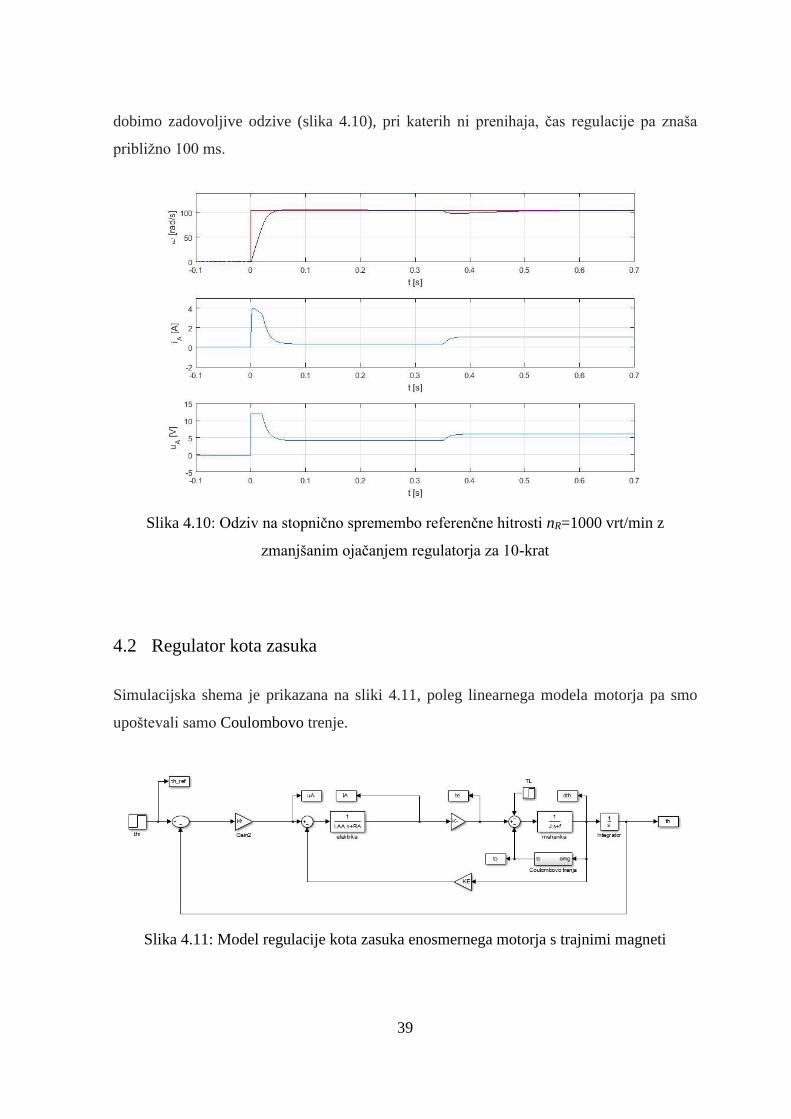
Slika 4.10: Odziv na stopnično spremembo referenčne hitrosti nR=1000 vrt/min z
zmanjšanim ojačanjem regulatorja za 10-krat .............................................................. 39
Slika 4.11: Model regulacije kota zasuka enosmernega motorja s trajnimi magneti .......... 39
Slika 4.12: Odzivi na stopnično spremembo referenčne vrednosti kota 𝜃𝑅 = 𝜋 brez
upoštevanja Coulombovega trenja ............................................................................... 40
ix
Slika 4.13: Odzivi na stopnično spremembo referenčne vrednosti kota 𝜃𝑅 = 𝜋 z
upoštevanjem Coulombovega trenja ............................................................................ 41
Slika 4.14: Odzivi na stopnično spremembo referenčne vrednosti kota 𝜃𝑅 = 𝜋 z
upoštevanjem Coulombovega trenja in povečani vrednost KR .................................... 41
Slika 4.15: Simulaciji na sliki 4.14 je dodano breme po času t = 1 s .................................. 42
Slika 5.1: Regulacijski sistem s krmilnikom Siemens S7-314 IFM .................................... 43
Slika 5.2: Meritev napetosti iz regulatorja pri stopnični spremembi vhodne napetosti ...... 46
Slika 5.3: Meritev toka pri stopnični spremembi vhodne napetosti .................................... 46
Slika 5.4: Meritev vrtljajev pri stopnični spremembi vhodne napetosti .............................. 47
Slika 5.5: Simulacijski odziv v primeru stopnične spremembe referenčne hitrosti z
zmanjšanim ojačanjem regulatorja za 8-krat glede na odziv iz slike (5.4) .................. 48
x
Kazalo tabel:
Tabela 2.1: Odčitane ustaljene vrednosti tokov pri različnih spremembah rotorske
napetosti in različnih začetnih položajih rotorja (slika 2.2) ........................................... 8
Tabela 2.2: Izračunane vrednosti rotorske upornosti ............................................................ 9
Tabela 2.3: Izračun konstante KE ......................................................................................... 10
Tabela 2.4: Izračun konstante KE pri nasprotni smeri vrtenja motorja ................................ 11
Tabela 2.5: Izračunane vrednost KT za različne vrednosti tokov ........................................ 12
Tabela 2.6: Izračunane vrednosti KT za različne vrednosti tokov – natančnejše meritve ... 13
Tabela 2.7: Merjenje toka in vrtljajev in izračune vrednosti za pozitivno hitrost vrtenja ... 14
Tabela 2.8: Merjenje toka in vrtljajev in izračune vrednosti za negativno hitrost vrtenja .. 15
Tabela 2.9: Vrednosti vztrajnostnih momentov za pozitivne in negativne hitrosti vrtenja
pri različnih tokovih ..................................................................................................... 18
Tabela 2.10: Eksperimentalno določene vrednosti parametrov testnega enosmernega
motorja s trajnimi magneti ........................................................................................... 20
Tabela 2.11: Primerjava izmerjenih vrednosti s simulacijskim izračunom ......................... 25
Tabela 2.12: Primerjava izmerjenih vrednosti s simulacijskim izračunom pri povečani
električni konstanti ....................................................................................................... 26
xi
Seznam uporabljenih simbolov:
G(s) – prenosna funkcija procesa
φrez – fazna rezerva
φ (ωC) – presečna frekvenca
𝑢𝐴 – napetost na rotorskih sponkah
𝑖𝐴 – rotorski tok
𝑅𝐴 – ohmska upornost rotorskega navitja
𝐿𝐴 – induktivnost rotorskega navitja
𝑓 – koeficient viskoznega trenja
𝐽 – vztrajnostni moment
𝐾𝐸 in 𝐾𝑇 – električna in navorna konstanta
𝑡𝐿 – navor bremena
T – navor na gredi motorja
𝜃 – kot zasuka rotorja
e(t) – regulacijsko odstopanje ali pogrešek
t – čas
K – ojačanje regulatorja
T0 – čas vzorčenja
Ti – časovna konstanta integratorja
q0 – parameter diskretnega algoritma regulatorja
q1 – parameter diskretnega algoritma regulatorja

1
1 Uvod
V današnjem času je uporaba enosmernih motorjev s trajnimi magneti zelo razširjena. V
veliki meri se uporabljajo kot zaganjači motorja v avtomobilih, za pogon brisalcev
vetrobranskega stekla, za pogon ventilatorjev, za dviganje in spuščanje stekel, prav tako pri
igračah in malih gospodinjskih aparatih.
Prednosti enosmernih motorjev s trajnimi magneti so te, da so dokaj enostavno grajeni,
nimajo vzbujalnega navitja, so relativno majhnih dimenzij, njihova izdelava je cenejša od
izdelave drugih vrst motorjev.
V diplomski nalogi smo opravili meritve za določitev parametrov enosmernega motorja s
trajnimi magneti, primerjali odzive motorja in njegovega modela, načrtovali regulator
hitrosti vrtenja in kota zasuka, opravili analizo z različnimi ojačanji regulatorja in na koncu
izvedli regulacijo z industrijskim krmilnikom Siemens.

2
2 Matematični model in določitev parametrov modela
Za določitev parametrov enosmernega motorja s trajnimi magneti izhajamo iz enačb (2.1) in
(2.2). Pri tem predstavlja (2.1) napetostno ravnotežje v rotorskem navitju, (2.2) pa ravnotežje
navorov na gredi motorja,
𝑢𝐴 = 𝑅𝐴𝑖𝐴 + 𝐿𝐴𝑑𝑖𝐴
𝑑𝑡+ 𝐾𝐸
𝑑𝜃
𝑑𝑡 (2.1)
𝐽𝑑2𝜃
𝑑𝑡2 = 𝐾𝑇𝑖𝐴 − 𝑡𝐿 − 𝑓𝑑𝜃
𝑑𝑡 (2.2)
pri čemer je:
𝑢𝐴 – napetost na rotorskih sponkah,
𝑖𝐴 – rotorski tok,
𝑅𝐴 – ohmska upornost rotorskega navitja,
𝐿𝐴 – induktivnost rotorskega navitja,
𝑓 – koeficient viskoznega trenja,
𝐽 – vztrajnostni moment,
𝐾𝐸 in 𝐾𝑇 – električna in navorna konstanta,
𝑡𝐿 – navor bremena,
𝜃 – kot zasuka rotorja.
2.1 Določitev rotorske upornosti in induktivnosti
Rotorsko upornost RA in rotorsko induktivnost LA določimo z meritvijo toka pri zavrtem
rotorju. Ker se motor ne vrti, je hitrost 𝑑𝜃
𝑑𝑡= 0 in ima napetostna enačba (2.1) obliko:
𝑢𝐴 = 𝑅𝐴𝑖𝐴 + 𝐿𝐴𝑑𝑖𝐴
𝑑𝑡 (2.3)

3
Za primer stopnične spremembe napetosti lahko izračunamo časovni odziv toka iA(t) tako,
da enačbo (2.3) pretvorimo v Laplaceovo področje in pri tem upoštevamo ničelne začetne
pogoje.
𝑈𝐴(𝑠) = (𝑅𝐴 + 𝐿𝐴𝑠)𝐼𝐴(𝑠) (2.4)
Določimo napetost v Laplaceovem področju UA(s) = 𝑈𝐴
𝑠 in izrazimo tok:
𝐼𝐴(𝑠) = 1
𝐿𝐴𝑠+𝑅𝐴
𝑈𝐴
𝑠 (2.5)
𝐼𝐴(𝑠) =
1
𝐿𝐴
𝑠+ 𝑅𝐴𝐿𝐴
𝑈𝐴
𝑠 (2.6)
Enačbo (2.6) razstavimo na parcialne ulomke:
1
𝐿𝐴
𝑠+ 𝑅𝐴𝐿𝐴
𝑈𝐴
𝑠=
𝐾1
𝑠+𝑅𝐴𝐿𝐴
+𝐾2
𝑠 (2.7)
Enačbo pomnožimo s (𝑠 +𝑅𝐴
𝐿𝐴), vstavimo 𝑠 = −
𝑅𝐴
𝐿𝐴 , nato enačbo pomnožimo s (s), vstavimo
s = 0 in dobimo koeficienta:
𝐾1 = −𝑈𝐴
𝑅𝐴 in 𝐾2 =
𝑈𝐴
𝑅𝐴
Rešitev v Laplaceovem področju:
𝐼𝐴 (𝑠) = −
𝑈𝐴𝑅𝐴
𝑠+𝑅𝐴𝐿𝐴
+
𝑈𝐴𝑅𝐴
𝑠 (2.8)
Enačbo (2.8) z inverzno Laplaceovo transformacijo pretvorimo v časovno področje:
𝑖𝐴(𝑡) =𝑈𝐴
𝑅𝐴(1 − 𝑒
−𝑅𝐴𝐿𝐴
𝑡)
𝑖𝐴(𝑡) = 𝐼𝐴 (1 − 𝑒−
𝑡
𝜏𝐴) (2.9)

4
kjer je τA rotorska časovna konstanta, definirana kot 𝜏𝐴 =𝐿𝐴
𝑅𝐴, IA pa je vrednost rotorskega
toka v ustaljenem stanju. Vrednost toka v trenutku t=τA je:
𝑖𝐴(𝜏𝐴) = 𝐼𝐴 (1 − 𝑒−
𝜏𝐴𝜏𝐴) = 𝐼𝐴(1 − 𝑒−1) = 0,632 𝐼𝐴 (2.10)
Iz dobljenega zapisa sledi, da lahko časovno konstanto določimo tako, da pri 63,2 % od
stacionarne vrednosti toka odčitamo čas.
Rotorsko napetost RA izračunamo iz razmerja med napetostjo UA in tokom IA v ustaljenem
stanju:
𝑅𝐴 =𝑈𝐴
𝐼𝐴 (2.11)
Ob znani časovni konstanti τA in znani rotorski upornosti RA lahko izračunamo rotorsko
induktivnost:
𝐿𝐴 = 𝜏𝐴𝑅𝐴 (2.12)
Potek in rezultat meritev
Pri zavrtem rotorju enosmernega motorja s trajnimi magneti smo na rotorskih sponkah
stopnično spremenili napetost in posneli časovni potek. Zavrt rotor prikazuje slika 2.1.
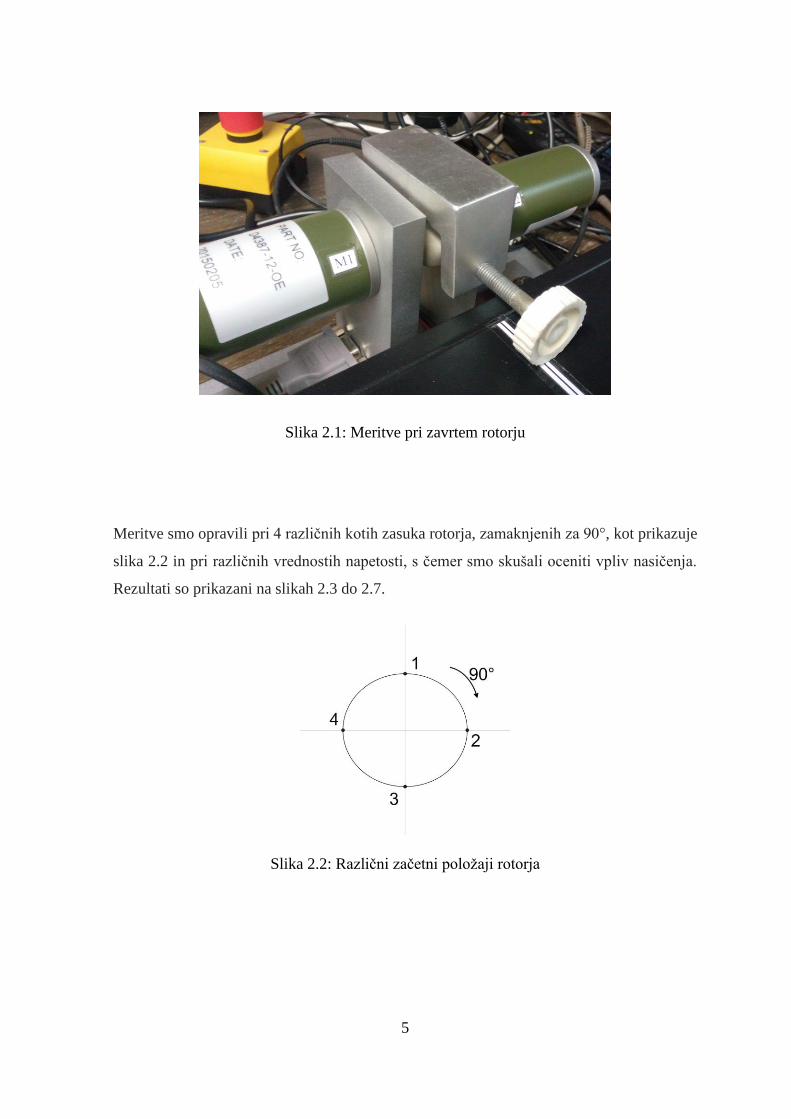
5
Slika 2.1: Meritve pri zavrtem rotorju
Meritve smo opravili pri 4 različnih kotih zasuka rotorja, zamaknjenih za 90°, kot prikazuje
slika 2.2 in pri različnih vrednostih napetosti, s čemer smo skušali oceniti vpliv nasičenja.
Rezultati so prikazani na slikah 2.3 do 2.7.
Slika 2.2: Različni začetni položaji rotorja
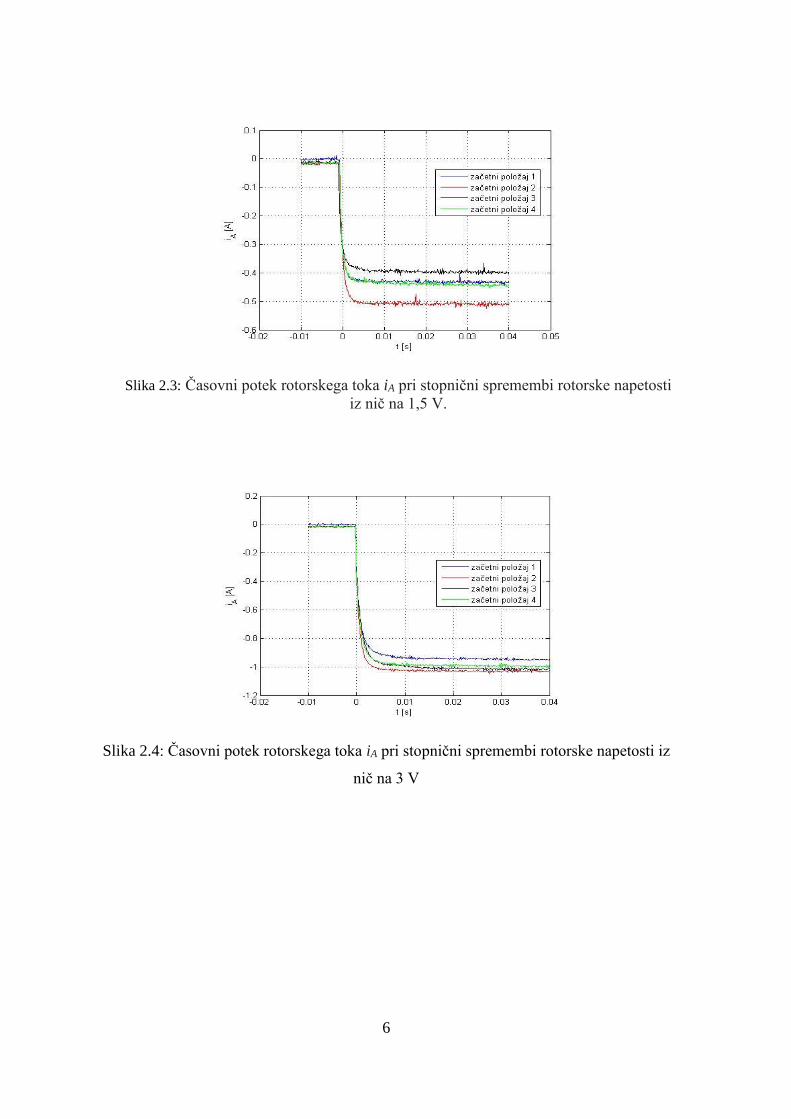
6
Slika 2.3: Časovni potek rotorskega toka iA pri stopnični spremembi rotorske napetosti
iz nič na 1,5 V.
Slika 2.4: Časovni potek rotorskega toka iA pri stopnični spremembi rotorske napetosti iz
nič na 3 V
7
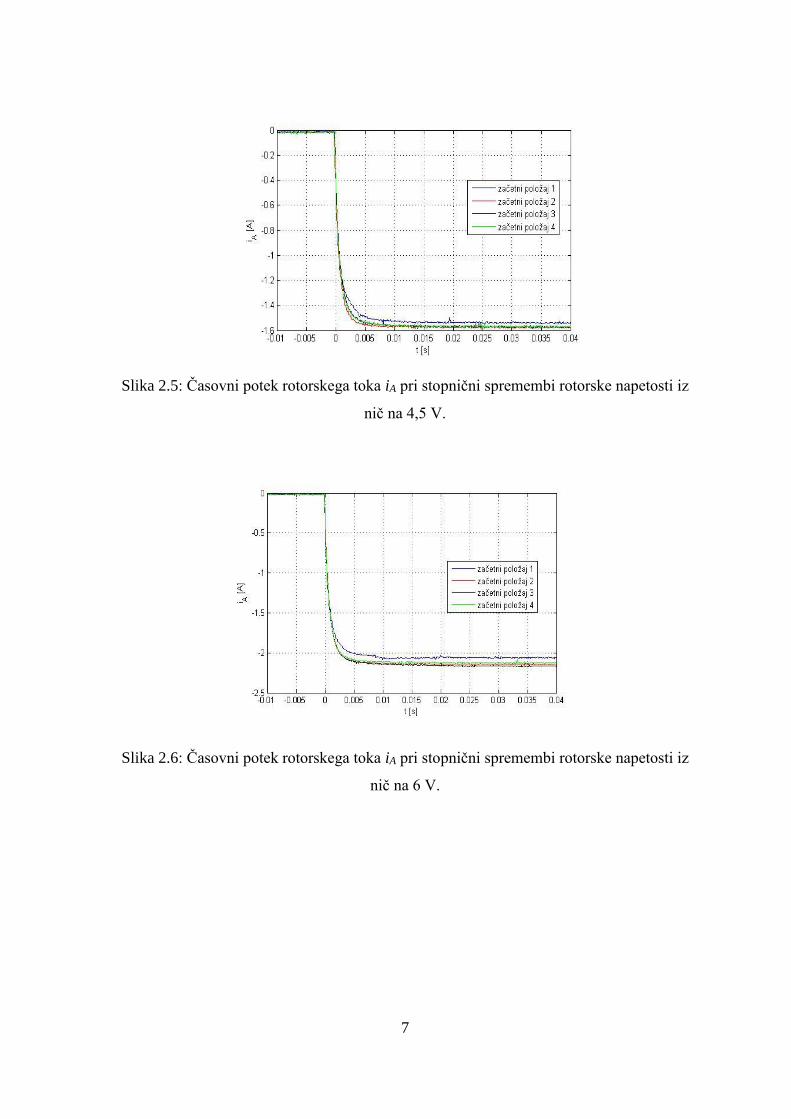
Slika 2.5: Časovni potek rotorskega toka iA pri stopnični spremembi rotorske napetosti iz
nič na 4,5 V.
Slika 2.6: Časovni potek rotorskega toka iA pri stopnični spremembi rotorske napetosti iz
nič na 6 V.
8
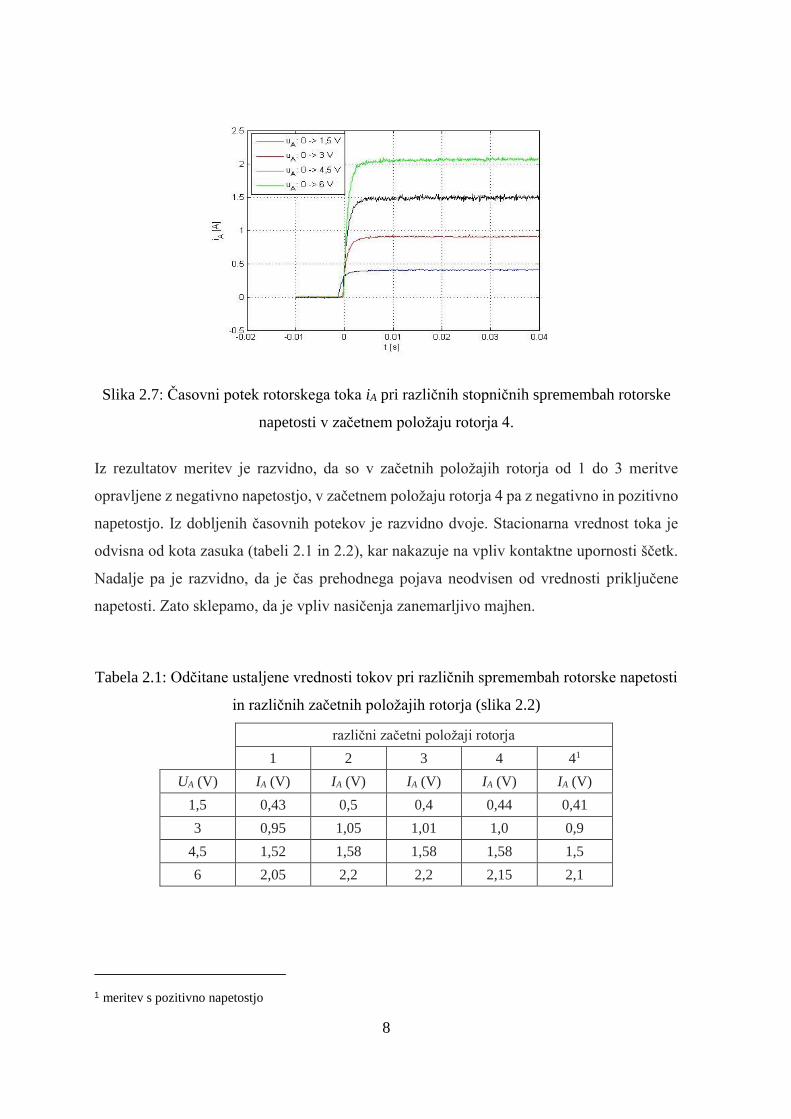
Slika 2.7: Časovni potek rotorskega toka iA pri različnih stopničnih spremembah rotorske
napetosti v začetnem položaju rotorja 4.
Iz rezultatov meritev je razvidno, da so v začetnih položajih rotorja od 1 do 3 meritve
opravljene z negativno napetostjo, v začetnem položaju rotorja 4 pa z negativno in pozitivno
napetostjo. Iz dobljenih časovnih potekov je razvidno dvoje. Stacionarna vrednost toka je
odvisna od kota zasuka (tabeli 2.1 in 2.2), kar nakazuje na vpliv kontaktne upornosti ščetk.
Nadalje pa je razvidno, da je čas prehodnega pojava neodvisen od vrednosti priključene
napetosti. Zato sklepamo, da je vpliv nasičenja zanemarljivo majhen.
Tabela 2.1: Odčitane ustaljene vrednosti tokov pri različnih spremembah rotorske napetosti
in različnih začetnih položajih rotorja (slika 2.2)
različni začetni položaji rotorja
1 2 3 4 41
UA (V) IA (V) IA (V) IA (V) IA (V) IA (V)
1,5 0,43 0,5 0,4 0,44 0,41
3 0,95 1,05 1,01 1,0 0,9
4,5 1,52 1,58 1,58 1,58 1,5
6 2,05 2,2 2,2 2,15 2,1
1 meritev s pozitivno napetostjo
9
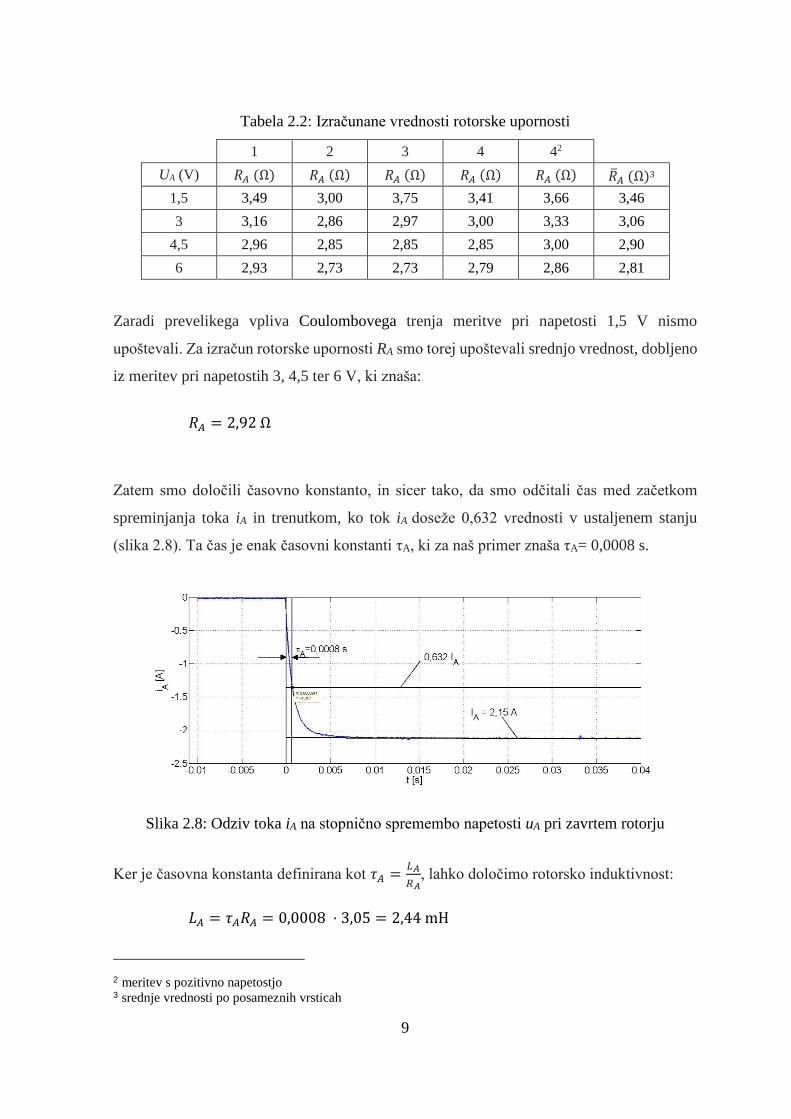
Tabela 2.2: Izračunane vrednosti rotorske upornosti
1 2 3 4 42
UA (V) 𝑅𝐴 (Ω) 𝑅𝐴 (Ω) 𝑅𝐴 (Ω) 𝑅𝐴 (Ω) 𝑅𝐴 (Ω) �̅�𝐴 (Ω)3
1,5 3,49 3,00 3,75 3,41 3,66 3,46
3 3,16 2,86 2,97 3,00 3,33 3,06
4,5 2,96 2,85 2,85 2,85 3,00 2,90
6 2,93 2,73 2,73 2,79 2,86 2,81
Zaradi prevelikega vpliva Coulombovega trenja meritve pri napetosti 1,5 V nismo
upoštevali. Za izračun rotorske upornosti RA smo torej upoštevali srednjo vrednost, dobljeno
iz meritev pri napetostih 3, 4,5 ter 6 V, ki znaša:
𝑅𝐴 = 2,92 Ω
Zatem smo določili časovno konstanto, in sicer tako, da smo odčitali čas med začetkom
spreminjanja toka iA in trenutkom, ko tok iA doseže 0,632 vrednosti v ustaljenem stanju
(slika 2.8). Ta čas je enak časovni konstanti τA, ki za naš primer znaša τA= 0,0008 s.
Slika 2.8: Odziv toka iA na stopnično spremembo napetosti uA pri zavrtem rotorju
Ker je časovna konstanta definirana kot 𝜏𝐴 =𝐿𝐴
𝑅𝐴, lahko določimo rotorsko induktivnost:
𝐿𝐴 = 𝜏𝐴𝑅𝐴 = 0,0008 ⋅ 3,05 = 2,44 mH
2 meritev s pozitivno napetostjo 3 srednje vrednosti po posameznih vrsticah

10
2.2 Določitev konstante 𝐾𝐸
Konstanto 𝐾𝐸 določimo tako, da neobremenjen motor pri odprtih rotorskih sponkah vrtimo
z drugim motorjem na isti osi.
Ker se generator vrti neobremenjen (𝑖𝐴 = 0) in ker opazujemo ustaljeno stanje (𝑑(∙)
𝑑𝑡= 0),
ima napetostna enačba (2.1) obliko:
𝑈𝐴 = 𝐾𝐸𝜔. (2.13)
Iz enačbe (2.13) izrazimo napetostno konstanto 𝐾𝐸:
𝐾𝐸 =𝑈𝐴
𝜔. (2.14)
Potek in rezultat meritev
V ustaljenem stanju izmerimo vrednost inducirane napetosti na rotorskih sponkah UA in
hitrost vrtenja ω. V našem primeru smo vrteli z enakim drugim motorjem na isti osi.
Vrednosti induciranih napetosti so znašale od 2 V do 10 V po koraku 2 V.
V tabelah 2.3 in 2.4 so prikazane inducirane napetosti UA, odčitane vrednosti vrtljajev n na
osi, izračunane vrednosti kotne hitrosti 𝜔 =2𝜋𝑛
60 in izračunane vrednosti KE po enačbi (2.14).
Tabela 2.3: Izračun konstante KE
UA (V) n (rpm) ω (rad/s) KE (Vs/rad)
2 639 66,91 0,0299
4 1275 133,51 0,0300
6 1908 199,80 0,0300
8 2565 268,60 0,0298
10 3186 333,63 0,0300

11
Tabela 2.4: Izračun konstante KE pri nasprotni smeri vrtenja motorja
UA (V) n (rpm) ω (rad/s) KE (Vs/rad)
2 647 67,75 0,0295
4 1272 133,20 0,0300
6 1915 200,53 0,0299
8 2556 267,66 0,0299
10 3194 334,47 0,0299
Iz rezultatov meritev izračunamo srednjo vrednost konstante KE = 0,03 Vs/rad.
2.3 Določitev konstante 𝐾𝑇
Konstanto 𝐾𝑇 določimo tako, da na os motorja privijemo ročico dolžine r, ki jo postavimo
na tehtnico. Ker se motor ne vrti (𝜔 = 0) in ker opazujemo ustaljeno stanje (𝑑(∙)
𝑑𝑡= 0), ima
enačba ravnotežja navorov (2.2) obliko:
𝐾𝑇𝐼𝐴 = 𝑇 (2.15)
Iz enačbe (2.15) izrazimo navorno konstanto 𝐾𝑇:
𝐾𝑇 =𝑇
𝐼𝐴 (2.16)
kjer je
T – navor na gredi motorja.
Navor motorja (2.15) je določen s produktom ročice r in sile F.
12
Potek in rezultat meritev
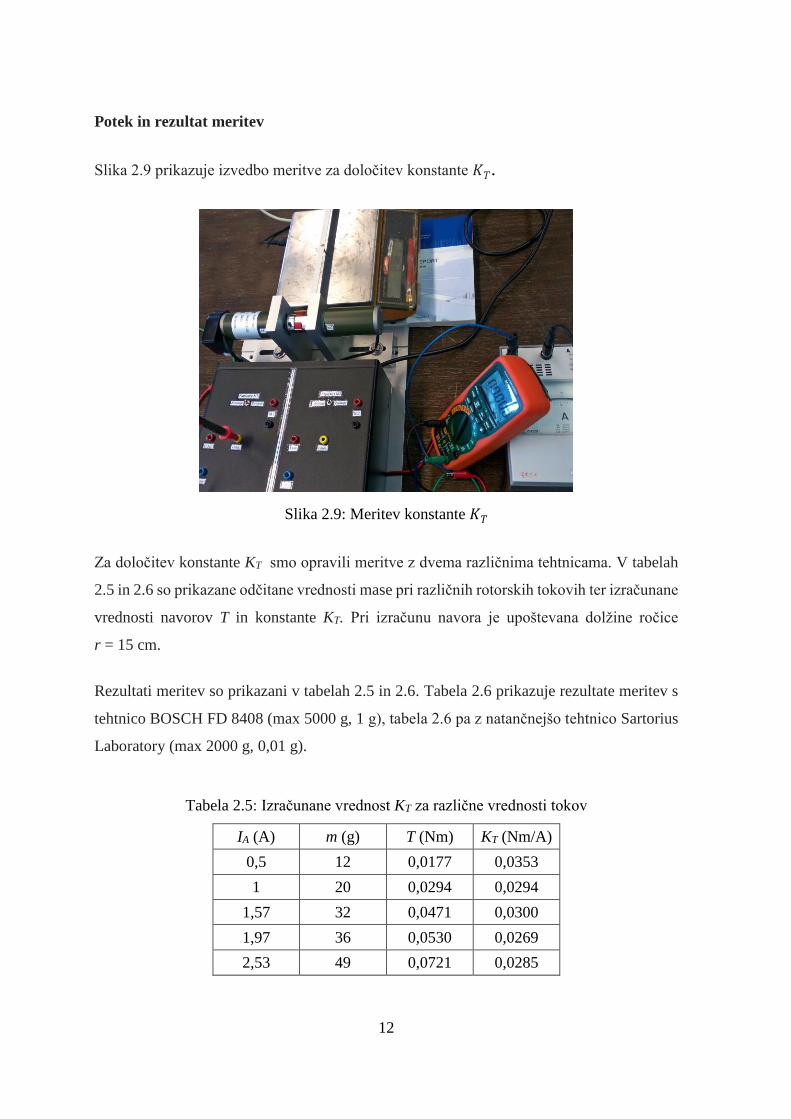
Slika 2.9 prikazuje izvedbo meritve za določitev konstante 𝐾𝑇.
Slika 2.9: Meritev konstante 𝐾𝑇
Za določitev konstante KT smo opravili meritve z dvema različnima tehtnicama. V tabelah
2.5 in 2.6 so prikazane odčitane vrednosti mase pri različnih rotorskih tokovih ter izračunane
vrednosti navorov T in konstante KT. Pri izračunu navora je upoštevana dolžine ročice
r = 15 cm.
Rezultati meritev so prikazani v tabelah 2.5 in 2.6. Tabela 2.6 prikazuje rezultate meritev s
tehtnico BOSCH FD 8408 (max 5000 g, 1 g), tabela 2.6 pa z natančnejšo tehtnico Sartorius
Laboratory (max 2000 g, 0,01 g).
Tabela 2.5: Izračunane vrednost KT za različne vrednosti tokov
IA (A) m (g) T (Nm) KT (Nm/A)
0,5 12 0,0177 0,0353
1 20 0,0294 0,0294
1,57 32 0,0471 0,0300
1,97 36 0,0530 0,0269
2,53 49 0,0721 0,0285
13
Tabela 2.6: Izračunane vrednosti KT za različne vrednosti tokov – natančnejše meritve
IA (A) m (g) T (Nm) KT (Nm/A)
0,522 12,44 0,0183 0,0351
1,074 20,9 0,0308 0,0286
1,5 30,85 0,0454 0,0303
2,008 39,98 0,0588 0,0293
2,498 49,35 0,0726 0,0291
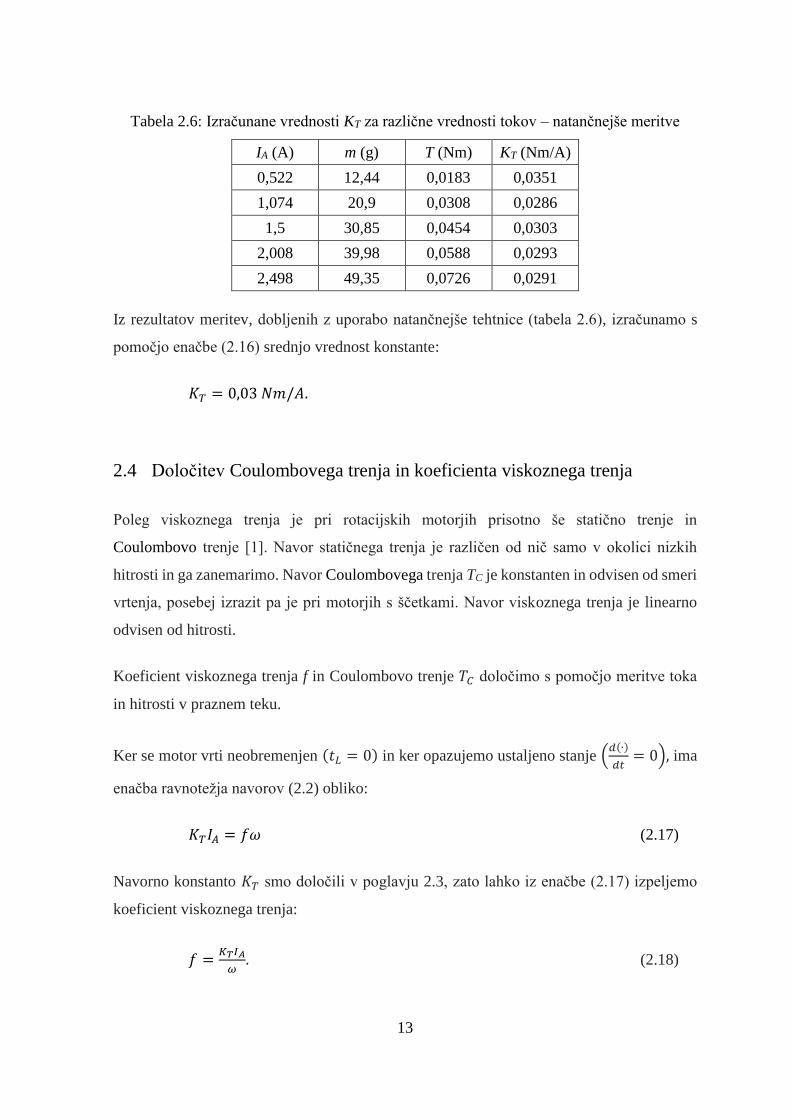
Iz rezultatov meritev, dobljenih z uporabo natančnejše tehtnice (tabela 2.6), izračunamo s
pomočjo enačbe (2.16) srednjo vrednost konstante:
𝐾𝑇 = 0,03 𝑁𝑚/𝐴.
2.4 Določitev Coulombovega trenja in koeficienta viskoznega trenja
Poleg viskoznega trenja je pri rotacijskih motorjih prisotno še statično trenje in
Coulombovo trenje [1]. Navor statičnega trenja je različen od nič samo v okolici nizkih
hitrosti in ga zanemarimo. Navor Coulombovega trenja TC je konstanten in odvisen od smeri
vrtenja, posebej izrazit pa je pri motorjih s ščetkami. Navor viskoznega trenja je linearno
odvisen od hitrosti.
Koeficient viskoznega trenja f in Coulombovo trenje 𝑇𝐶 določimo s pomočjo meritve toka
in hitrosti v praznem teku.
Ker se motor vrti neobremenjen (𝑡𝐿 = 0) in ker opazujemo ustaljeno stanje (𝑑(∙)
𝑑𝑡= 0), ima
enačba ravnotežja navorov (2.2) obliko:
𝐾𝑇𝐼𝐴 = 𝑓𝜔 (2.17)
Navorno konstanto 𝐾𝑇 smo določili v poglavju 2.3, zato lahko iz enačbe (2.17) izpeljemo
koeficient viskoznega trenja:
𝑓 =𝐾𝑇𝐼𝐴
𝜔. (2.18)
14
Dobljena enačba velja samo v primeru, ko je Coulombovo trenje TC zanemarljivo. V
nasprotnem primeru je potrebno opraviti meritve pri različnih hitrostih vrtenja, seveda za
obe smeri.
Potek in rezultat meritev
Karakteristiko trenja 𝑇𝑡(𝜔) (slika 2.10) in karakteristiko 𝐼𝐴(𝜔) (slika 2.11) smo določili
tako, da smo pri neobremenjenem motorju spreminjali napetost na rotorskih sponkah in za
vsako nastavljeno vrednost napetosti v ustaljenem stanju izmerili vrednost toka IA in
hitrost ω.
Za merjenje toka smo uporabili merilnik z ojačanjem kmi = 0,8 V/A, za merjenje vrtljajev pa
merilnik z ojačanjem kωi = 0,03 Vs/rad.
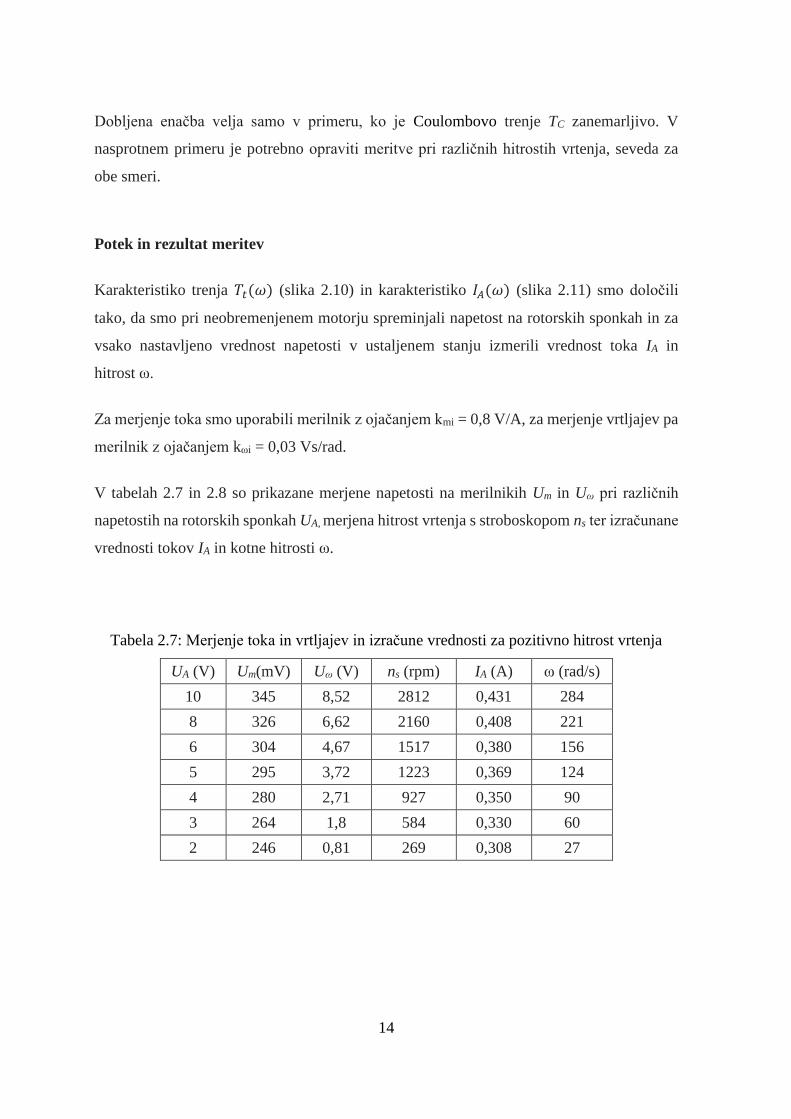
V tabelah 2.7 in 2.8 so prikazane merjene napetosti na merilnikih Um in Uω pri različnih
napetostih na rotorskih sponkah UA, merjena hitrost vrtenja s stroboskopom ns ter izračunane
vrednosti tokov IA in kotne hitrosti ω.
Tabela 2.7: Merjenje toka in vrtljajev in izračune vrednosti za pozitivno hitrost vrtenja
UA (V) Um(mV) Uω (V) ns (rpm) IA (A) ω (rad/s)
10 345 8,52 2812 0,431 284
8 326 6,62 2160 0,408 221
6 304 4,67 1517 0,380 156
5 295 3,72 1223 0,369 124
4 280 2,71 927 0,350 90
3 264 1,8 584 0,330 60
2 246 0,81 269 0,308 27
15
Tabela 2.8: Merjenje toka in vrtljajev in izračune vrednosti za negativno hitrost vrtenja
UA (V) Um(mV) Uω (V) ns (rpm) IA (A) ω (rad/s)
10 381 8,82 2893 0,476 294
8 371 6,93 2276 0,464 231
6 354 5,01 1641 0,443 167
5 344 4,05 1325 0,430 135
4 331 3,11 992 0,414 104
3 319 2,19 727 0,399 73
2 298 1,07 346 0,373 36
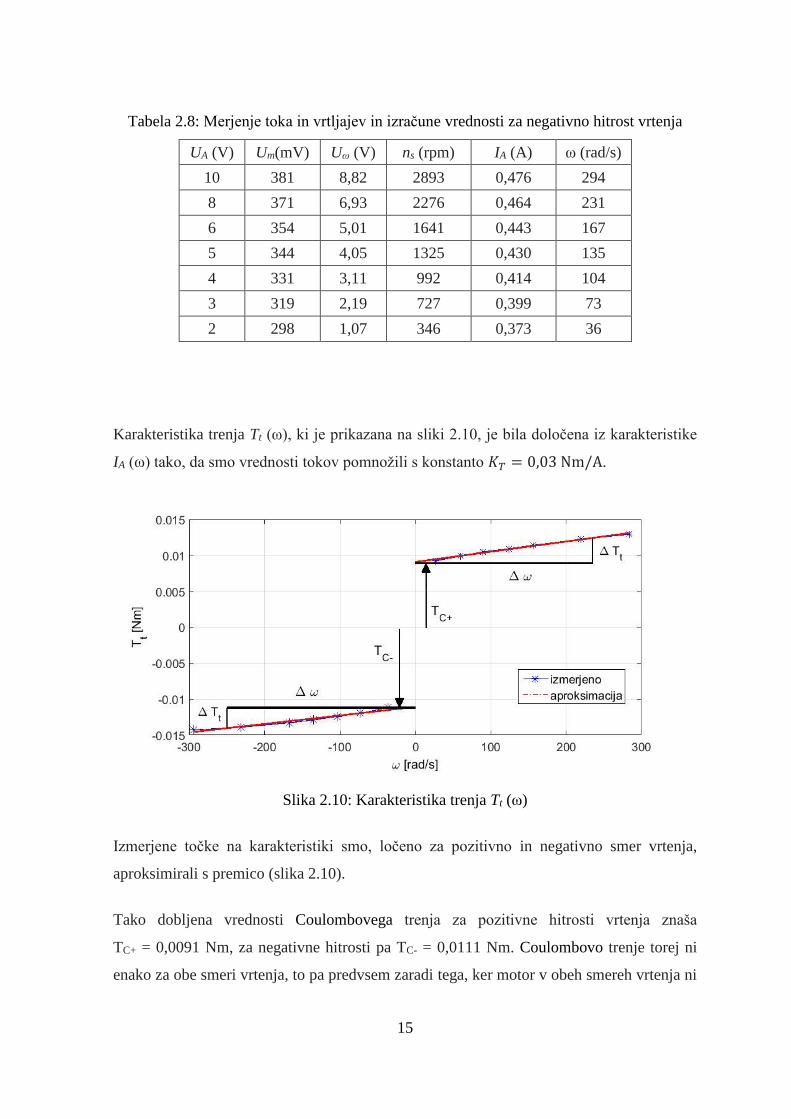
Karakteristika trenja Tt (ω), ki je prikazana na sliki 2.10, je bila določena iz karakteristike
IA (ω) tako, da smo vrednosti tokov pomnožili s konstanto 𝐾𝑇 = 0,03 Nm/A.
Slika 2.10: Karakteristika trenja Tt (ω)
Izmerjene točke na karakteristiki smo, ločeno za pozitivno in negativno smer vrtenja,
aproksimirali s premico (slika 2.10).
Tako dobljena vrednosti Coulombovega trenja za pozitivne hitrosti vrtenja znaša
TC+ = 0,0091 Nm, za negativne hitrosti pa TC- = 0,0111 Nm. Coulombovo trenje torej ni
enako za obe smeri vrtenja, to pa predvsem zaradi tega, ker motor v obeh smereh vrtenja ni

16
enako utečen. Zaradi tega trenja se motor tudi pri priključeni rotorski napetosti, manjši od
2 V, ne vrti.
Koeficient viskoznega trenja smo, ločeno za pozitivno in negativno smer vrtenja, določili iz
izmerjenega naklona kot 𝑓 =∆𝑇
∆𝜔, kot prikazuje slika 2.10. Dobljeni rezultat za pozitivne
hitrosti je f+ = 1,41 · 10-5 Nms/rad, za negativne pa f- = 1,18 · 10-5 Nms/rad. Zaradi male
razlike in pogreškov pri meritvah lahko uporabimo kar srednjo vrednost obeh izračunanih
rezultatov, ki znaša f = 1,3 · 10-5 Nms/rad.
2.5 Določitev vztrajnostnega momenta
Vztrajnostni moment določimo tako, da neobremenjen motor zaganjamo s konstantnim
vsiljenim tokom IA.
Ker se motor vrti neobremenjen (𝑡𝐿 = 0) in ker je rotorski tok vsiljen in konstanten
(𝑖𝐴(𝑡) = 𝐼𝐴), ima enačba ravnotežja navorov obliko:
𝐽𝑑𝜔
𝑑𝑡= 𝐾𝑇𝐼𝐴 − 𝑇𝐶 − 𝑓𝜔. (2.19)
V enačbi (2.19) lahko zanemarimo viskozno trenje, če zagotovimo ustrezno velik tok pri
nizkih hitrostih, saj je takrat električni navor prevladujoč (𝐾𝑇𝐼𝐴 ≫ 𝑓𝜔). V tem primeru je
pospeševalni navor enak vsoti električnega navora in Coulombovega trenja, ki ga
obravnavamo kot konstanto breme in ga ne smemo zanemariti:
𝐽𝑑𝜔
𝑑𝑡= 𝐾𝑇𝐼𝐴 − 𝑇𝐶 (2.20)
Iz enačbe (2.20) izrazimo kotno hitrost:
𝜔(𝑡) =1
𝐽∫ (𝐾𝑇𝐼𝐴 − 𝑇𝐶)𝑑𝑡
𝑡2
𝑡1 (2.21)
𝜔(𝑡) =𝑡2−𝑡1
𝐽(𝐾𝑇𝐼𝐴 − 𝑇𝐶) (2.22)
17
𝜔(𝑡) se spreminja linearno, kar pomeni, da je kotni pospešek konstanten (𝑑𝜔
𝑑𝑡= konst. ) in
ga lahko izrazimo z diferencama:
𝑑𝜔
𝑑𝑡=
∆𝜔
∆𝑡=
𝜔2−𝜔1
𝑡2−𝑡1. (2.23)
Iz enačbe (2.20) izrazimo ob upoštevanju (2.23) vztrajnostni moment:
𝐽 =∆𝑡
∆𝜔(𝐾𝑇𝐼𝐴 − 𝑇𝐶). (2.24)
Potek in rezultat meritev
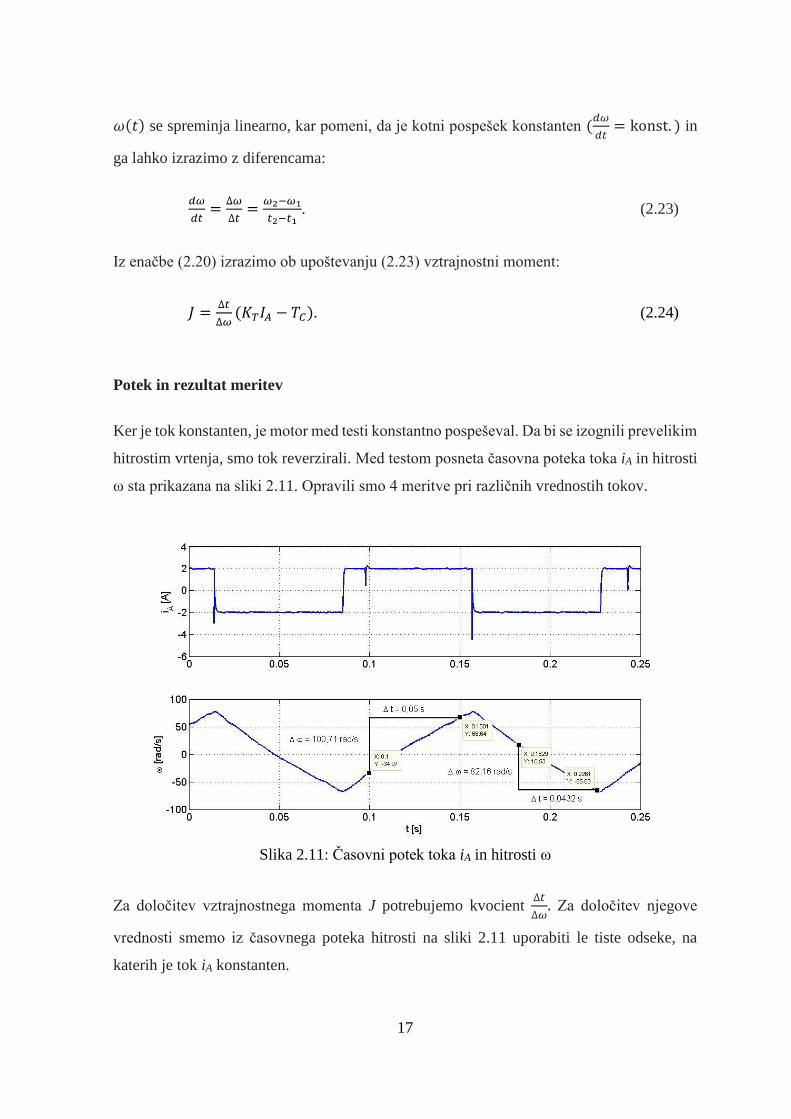
Ker je tok konstanten, je motor med testi konstantno pospeševal. Da bi se izognili prevelikim
hitrostim vrtenja, smo tok reverzirali. Med testom posneta časovna poteka toka iA in hitrosti
ω sta prikazana na sliki 2.11. Opravili smo 4 meritve pri različnih vrednostih tokov.
Slika 2.11: Časovni potek toka iA in hitrosti ω
Za določitev vztrajnostnega momenta J potrebujemo kvocient ∆𝑡
∆𝜔. Za določitev njegove
vrednosti smemo iz časovnega poteka hitrosti na sliki 2.11 uporabiti le tiste odseke, na
katerih je tok iA konstanten.

18
S slike 2.11 lahko za pozitivne hitrosti ω odčitamo: Δt = 0,05 s in Δω = 100,71 rad/s.
Vrednosti za negativne hitrosti ω so: Δt = 0,0432 s in Δω = 82,16 rad/s.
Vztrajnostni moment za pozitivne hitrosti vrtenja z upoštevanjem Coulombovega trenja:
𝐽+ =∆𝑡
∆𝜔(𝐾𝑇𝐼𝐴 − 𝑇𝐶) = 2,53 ∙ 10−5 𝑘𝑔𝑚2.
Vztrajnostni moment za negativne hitrosti vrtenja z upoštevanjem Coulombovega trenja:
𝐽− =∆𝑡
∆𝜔(𝐾𝑇𝐼𝐴 − 𝑇𝐶) = 2,57 ∙ 10−5 𝑘𝑔𝑚2.
Rezultati dobljeni pri različnih vrednostih tokov so prikazani v tabeli 2.9.
Tabela 2.9: Vrednosti vztrajnostnih momentov za pozitivne in negativne hitrosti vrtenja pri
različnih tokovih
IA (A) J+ (kgm2) J- (kgm2)
2 2,53 ∙ 10−5 2,57 ∙ 10−5
1,5 2,96 ∙ 10−5 2,89 ∙ 10−5
1 3,18 ∙ 10−5 3,07 ∙ 10−5
0,5 4,83 ∙ 10−5 4,21 ∙ 10−5
Pri toku 0,5 A vrednosti vztrajnostnih momentov preveč odstopajo od ostalih vrednostih, kar
je verjetno posledica vpliva viskoznega trenja, zato te meritve pri izračunu srednje vrednosti
ne upoštevamo.
Iz dobljenih rezultatov izračunamo srednjo vrednost:
𝐽 = 2,87 ∙ 10−5 𝑘𝑔𝑚2
Naredili smo tudi iztečna preizkusa za obe smeri vrtenja. V primeru, kadar bi bilo
Coulombovo trenje zanemarljivo, bi hitrost morala upadati eksponentno. Iz dobljenega
časovnega poteka bi lahko določili časovno konstanto in ob znanem viskoznem trenju tudi
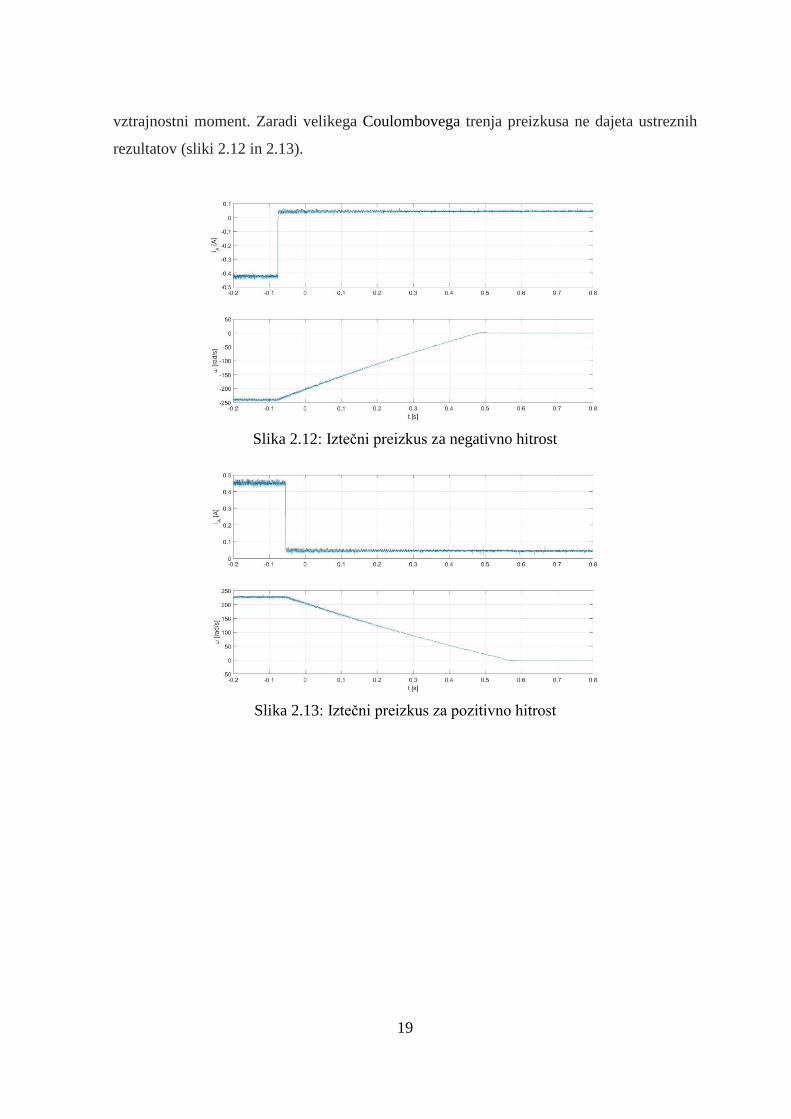
19
vztrajnostni moment. Zaradi velikega Coulombovega trenja preizkusa ne dajeta ustreznih
rezultatov (sliki 2.12 in 2.13).
Slika 2.12: Iztečni preizkus za negativno hitrost
Slika 2.13: Iztečni preizkus za pozitivno hitrost
20
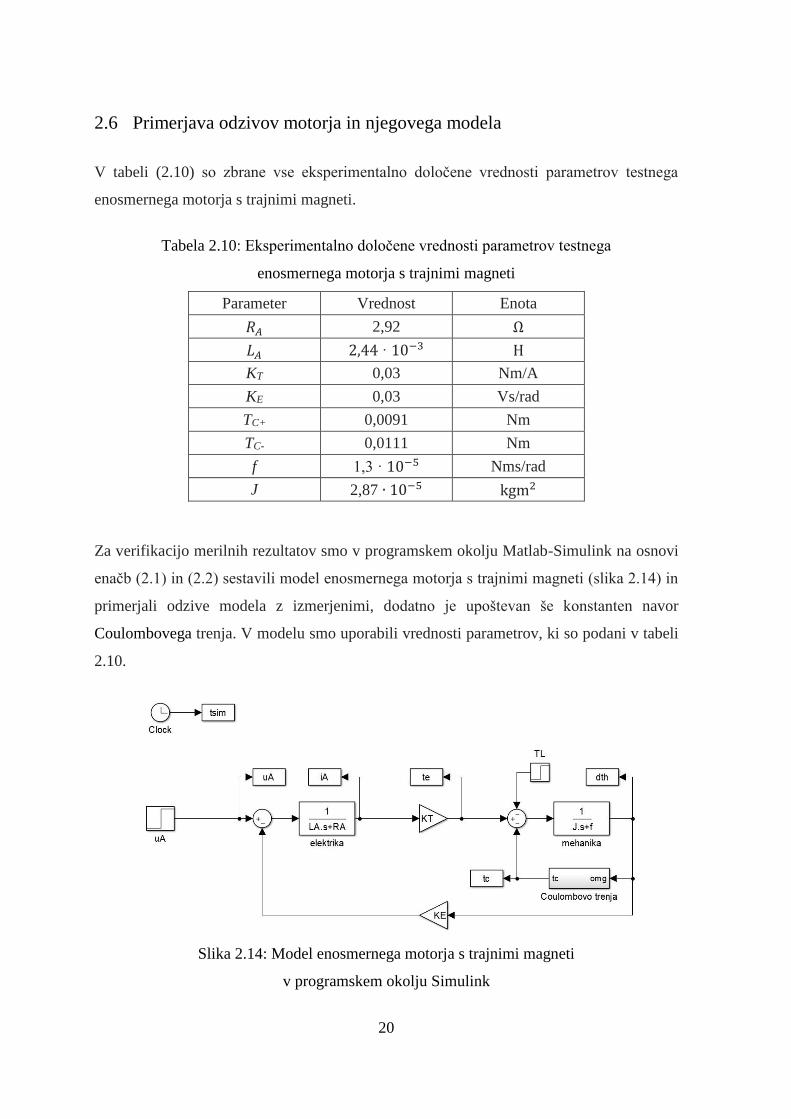
2.6 Primerjava odzivov motorja in njegovega modela
V tabeli (2.10) so zbrane vse eksperimentalno določene vrednosti parametrov testnega
enosmernega motorja s trajnimi magneti.
Tabela 2.10: Eksperimentalno določene vrednosti parametrov testnega
enosmernega motorja s trajnimi magneti
Parameter Vrednost Enota
𝑅𝐴 2,92 Ω
𝐿𝐴 2,44 · 10−3 H
KT 0,03 Nm/A
KE 0,03 Vs/rad
TC+ 0,0091 Nm
TC- 0,0111 Nm
f 1,3 · 10−5 Nms/rad
J 2,87 ∙ 10−5 kgm2
Za verifikacijo merilnih rezultatov smo v programskem okolju Matlab-Simulink na osnovi
enačb (2.1) in (2.2) sestavili model enosmernega motorja s trajnimi magneti (slika 2.14) in
primerjali odzive modela z izmerjenimi, dodatno je upoštevan še konstanten navor
Coulombovega trenja. V modelu smo uporabili vrednosti parametrov, ki so podani v tabeli
2.10.
Slika 2.14: Model enosmernega motorja s trajnimi magneti
v programskem okolju Simulink
21
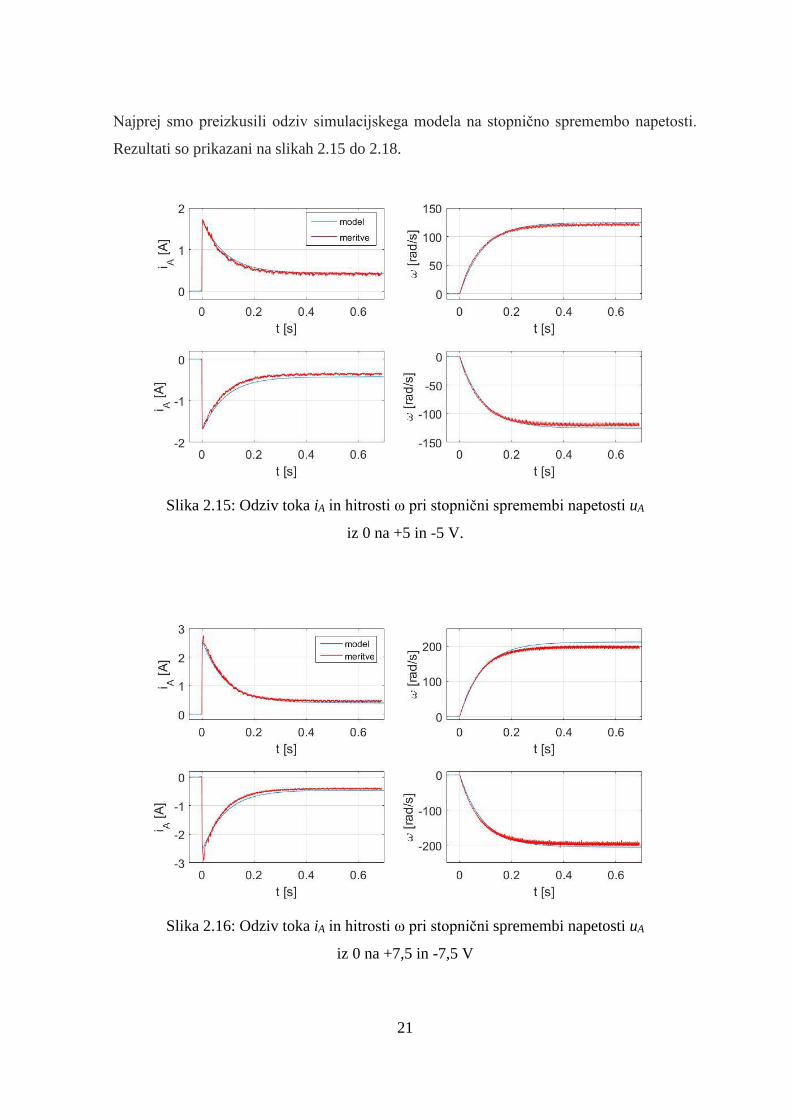
Najprej smo preizkusili odziv simulacijskega modela na stopnično spremembo napetosti.
Rezultati so prikazani na slikah 2.15 do 2.18.
Slika 2.15: Odziv toka iA in hitrosti ω pri stopnični spremembi napetosti uA
iz 0 na +5 in -5 V.
Slika 2.16: Odziv toka iA in hitrosti ω pri stopnični spremembi napetosti uA
iz 0 na +7,5 in -7,5 V
22
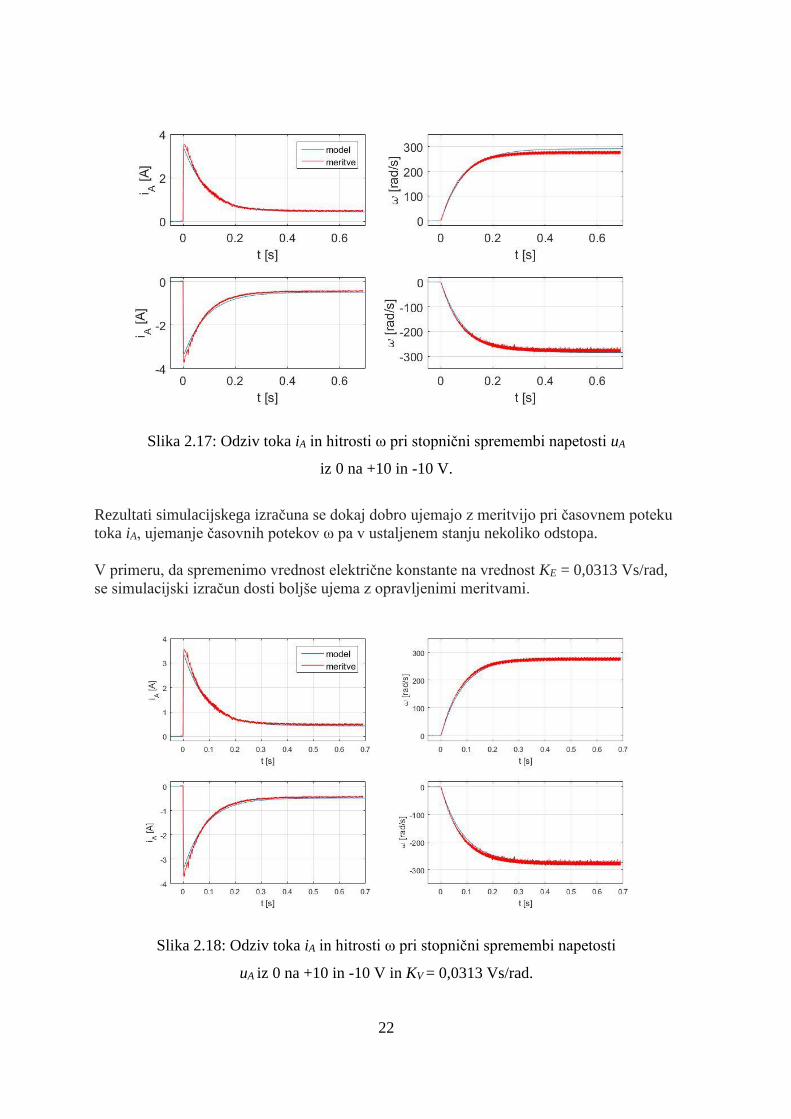
Slika 2.17: Odziv toka iA in hitrosti ω pri stopnični spremembi napetosti uA
iz 0 na +10 in -10 V.
Rezultati simulacijskega izračuna se dokaj dobro ujemajo z meritvijo pri časovnem poteku
toka iA, ujemanje časovnih potekov ω pa v ustaljenem stanju nekoliko odstopa.
V primeru, da spremenimo vrednost električne konstante na vrednost KE = 0,0313 Vs/rad,
se simulacijski izračun dosti boljše ujema z opravljenimi meritvami.
Slika 2.18: Odziv toka iA in hitrosti ω pri stopnični spremembi napetosti
uA iz 0 na +10 in -10 V in KV = 0,0313 Vs/rad.
23
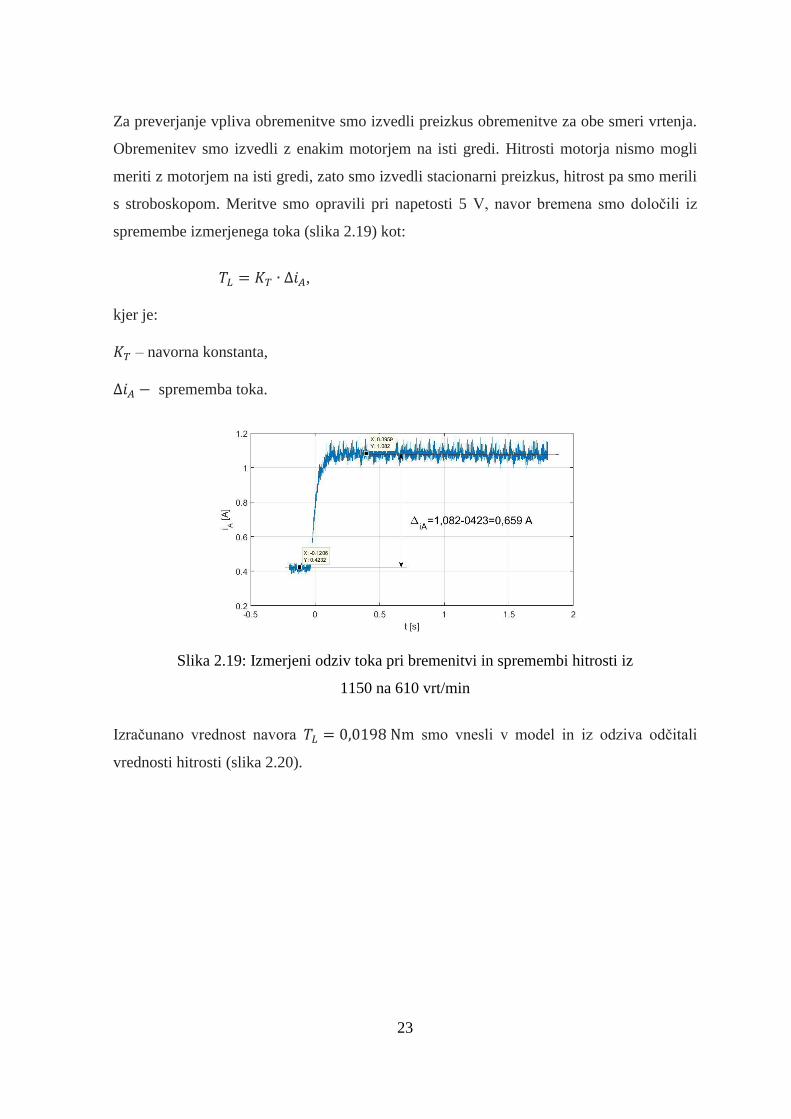
Za preverjanje vpliva obremenitve smo izvedli preizkus obremenitve za obe smeri vrtenja.
Obremenitev smo izvedli z enakim motorjem na isti gredi. Hitrosti motorja nismo mogli
meriti z motorjem na isti gredi, zato smo izvedli stacionarni preizkus, hitrost pa smo merili
s stroboskopom. Meritve smo opravili pri napetosti 5 V, navor bremena smo določili iz
spremembe izmerjenega toka (slika 2.19) kot:
𝑇𝐿 = 𝐾𝑇 ∙ Δ𝑖𝐴,
kjer je:
𝐾𝑇 – navorna konstanta,
Δ𝑖𝐴 − sprememba toka.
Slika 2.19: Izmerjeni odziv toka pri bremenitvi in spremembi hitrosti iz
1150 na 610 vrt/min
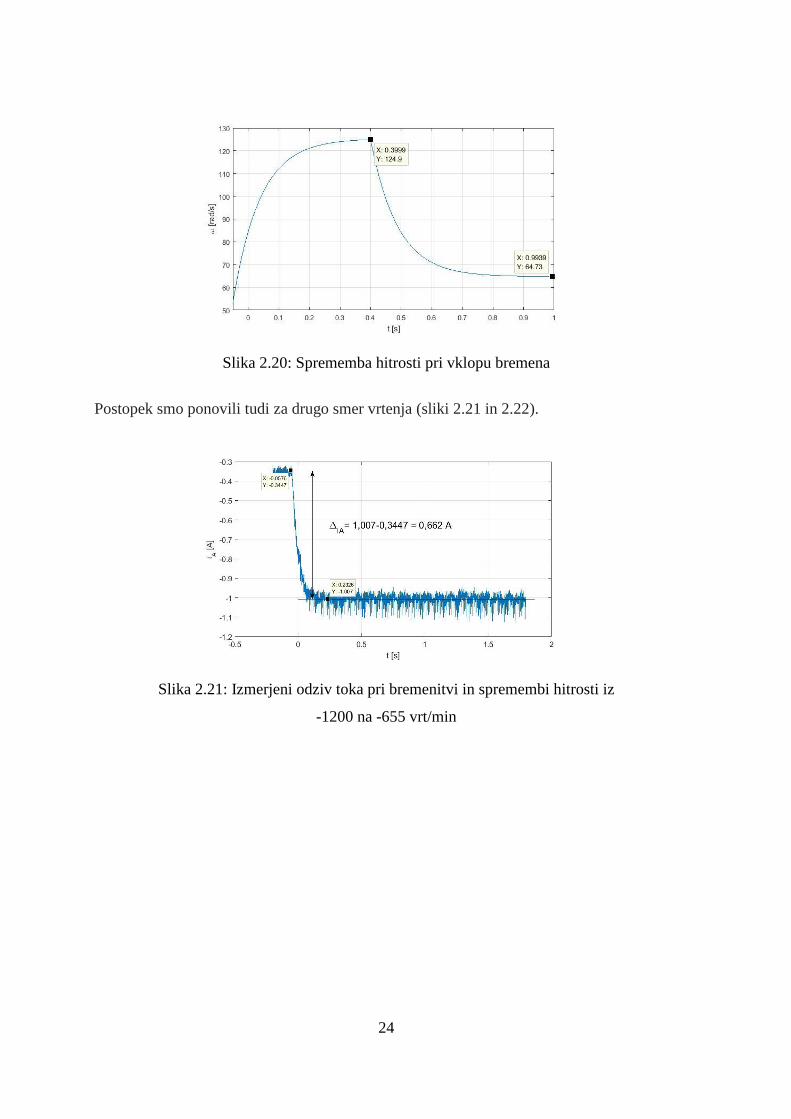
Izračunano vrednost navora 𝑇𝐿 = 0,0198 Nm smo vnesli v model in iz odziva odčitali
vrednosti hitrosti (slika 2.20).
24
Slika 2.20: Sprememba hitrosti pri vklopu bremena
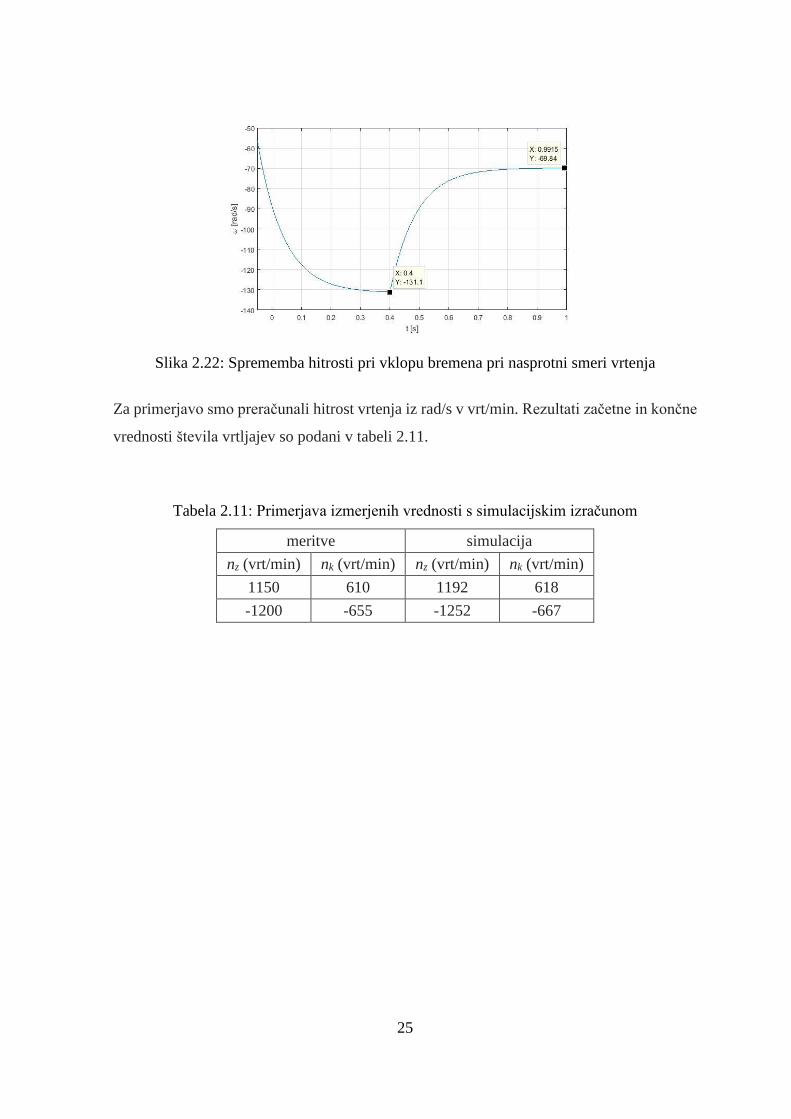
Postopek smo ponovili tudi za drugo smer vrtenja (sliki 2.21 in 2.22).
Slika 2.21: Izmerjeni odziv toka pri bremenitvi in spremembi hitrosti iz
-1200 na -655 vrt/min
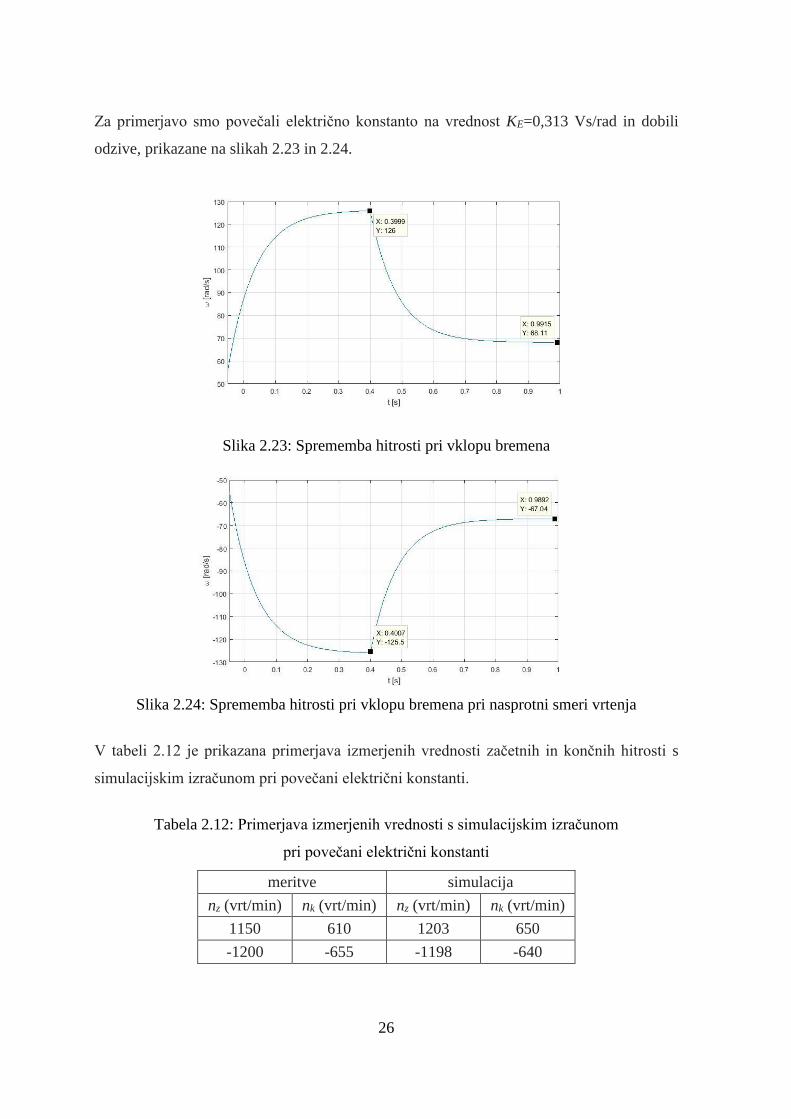
25
Slika 2.22: Sprememba hitrosti pri vklopu bremena pri nasprotni smeri vrtenja
Za primerjavo smo preračunali hitrost vrtenja iz rad/s v vrt/min. Rezultati začetne in končne
vrednosti števila vrtljajev so podani v tabeli 2.11.
Tabela 2.11: Primerjava izmerjenih vrednosti s simulacijskim izračunom
meritve simulacija
nz (vrt/min) nk (vrt/min) nz (vrt/min) nk (vrt/min)
1150 610 1192 618
-1200 -655 -1252 -667
26
Za primerjavo smo povečali električno konstanto na vrednost KE=0,313 Vs/rad in dobili
odzive, prikazane na slikah 2.23 in 2.24.
Slika 2.23: Sprememba hitrosti pri vklopu bremena
Slika 2.24: Sprememba hitrosti pri vklopu bremena pri nasprotni smeri vrtenja
V tabeli 2.12 je prikazana primerjava izmerjenih vrednosti začetnih in končnih hitrosti s
simulacijskim izračunom pri povečani električni konstanti.
Tabela 2.12: Primerjava izmerjenih vrednosti s simulacijskim izračunom
pri povečani električni konstanti
meritve simulacija
nz (vrt/min) nk (vrt/min) nz (vrt/min) nk (vrt/min)
1150 610 1203 650
-1200 -655 -1198 -640
27
3 Načrtovanje regulacije in analiza
Izbrali smo enozančno regulacijsko zgradbo. Za regulacijo hitrosti vrtenja smo izbrali
PI-regulator, za regulacijo kota zasuka pa P-regulator. Pri načrtovanju smo predpostavili
idealne merilnike in napajalnik z ojačanjem 1. Parametre regulatorjev smo določili s
pomočjo frekvenčnih karakteristik [2]. Uporabili smo poenostavljeno kompenzacijsko
metodo [3].
3.1 Načrtovanje regulatorja hitrosti vrtenja
Za načrtovanje regulatorja hitrosti vrtenja smo uporabili enozančno regulacijo s PI
regulatorjem. Časovno konstanto integratorja smo izbrali največjo v procesu.
Prenosna funkcija PI regulatorja je podana z izrazom:
𝐺𝑅(𝑠) = 𝐾𝑅𝑠𝜏𝑖+1
𝑠𝜏𝑖, (3.1)
kjer je:
𝐺𝑅(𝑠) – prenosna funkcija regulatorja,
𝐾𝑅 – ojačanje regulatorja,
𝜏𝑖 – časovna konstanta integracijskega člena.
Potrebno ojačanje regulatorja smo določili s pomočjo frekvenčnih karakteristik.
Določitev časovnih konstant procesa
Prenosna funkcija našega procesa je določena z izrazom:

28
𝐺𝑃(𝑠) =
𝐾𝑇𝐽𝐿𝐴
𝑠2+(𝑅𝐴𝐿𝐴
+𝑓
𝐽)𝑠+
𝑓𝑅𝐴+𝐾𝑉𝐾𝑇𝐽𝐿𝐴
. (3.2)
Izračunamo ničli imenovalca (s1 in s2),
𝑠2 + 𝐴𝑠 + 𝐵 = (𝑠 + 𝑠1)(𝑠 + 𝑠2)
kjer je: 𝐴 =𝑅𝐴
𝐿𝐴+
𝑓
𝐽= 1197 𝐵 =
𝑓𝑅𝐴+𝐾𝐸𝐾𝑇
𝐽𝐿𝐴= 13394.
Izraz preuredimo v obliko:
(𝑠 + 𝑠1)(𝑠 + 𝑠2) = (𝑠𝜏1 + 1)(𝑠𝜏2 + 1),
kjer sta τ1 in τ2 časovni konstanti procesa in ju izračunamo kot 𝜏1 =1
𝑠1 in 𝜏2 =
1
𝑠2 .
Vrednosti znašata τ1=0,0008 s in τ2=0,0885 s.
Za τi izberemo največjo časovno konstanto v procesu, τi = 0,0885 s.
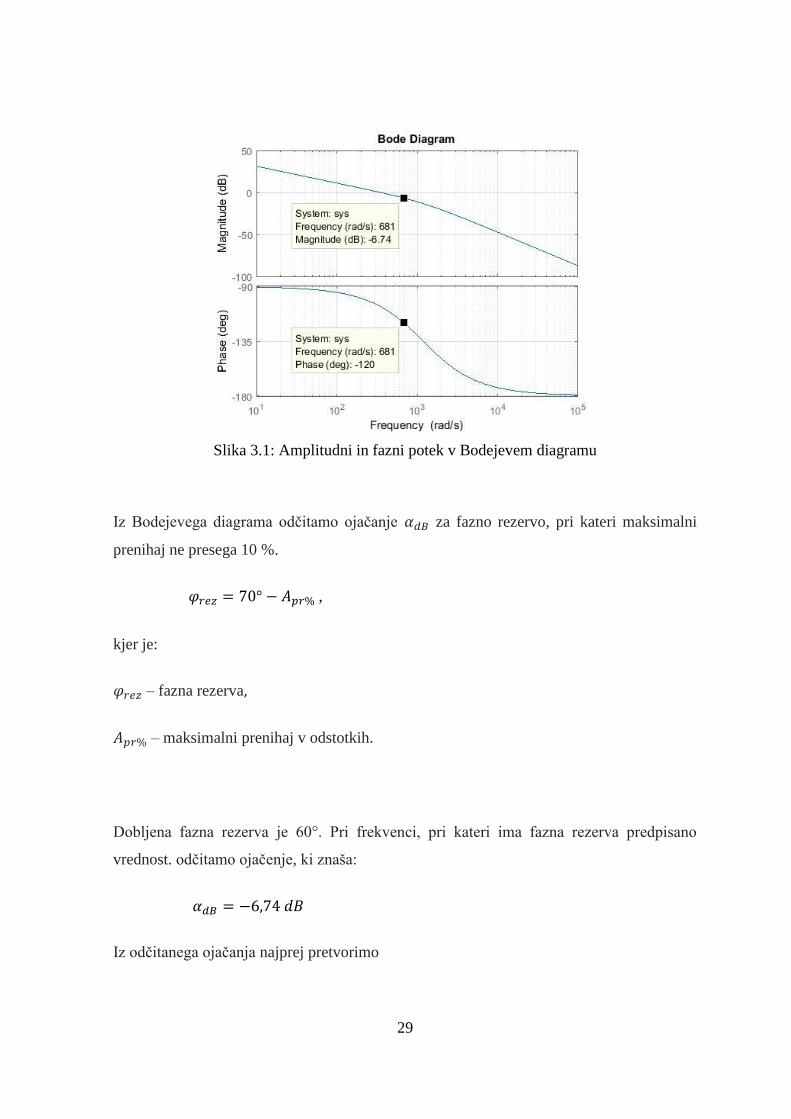
Bodejev diagram
Za določitev ojačanja regulatorja KR narišemo Bodejev diagram (slika 3.1) za odprtozančno
prenosno funkcijo 𝐺0(𝑠) = 𝐺𝑅 (𝑠) ∙ 𝐺𝑃(𝑠) z upoštevanjem ojačanja KR =1.
29
Slika 3.1: Amplitudni in fazni potek v Bodejevem diagramu
Iz Bodejevega diagrama odčitamo ojačanje 𝛼𝑑𝐵 za fazno rezervo, pri kateri maksimalni
prenihaj ne presega 10 %.
𝜑𝑟𝑒𝑧 = 70° − 𝐴𝑝𝑟% ,
kjer je:
𝜑𝑟𝑒𝑧 – fazna rezerva,
𝐴𝑝𝑟% – maksimalni prenihaj v odstotkih.
Dobljena fazna rezerva je 60°. Pri frekvenci, pri kateri ima fazna rezerva predpisano
vrednost. odčitamo ojačenje, ki znaša:
𝛼𝑑𝐵 = −6,74 𝑑𝐵
Iz odčitanega ojačanja najprej pretvorimo
30
𝛼𝑑𝐵 = 20 ∙ 𝑙𝑜𝑔10 𝛼 → 𝛼 = 10𝛼𝑑𝐵
20 = 0,46.
Ojačanje regulatorja določimo kot:
𝐾𝑅 =1
𝛼= 2,17.
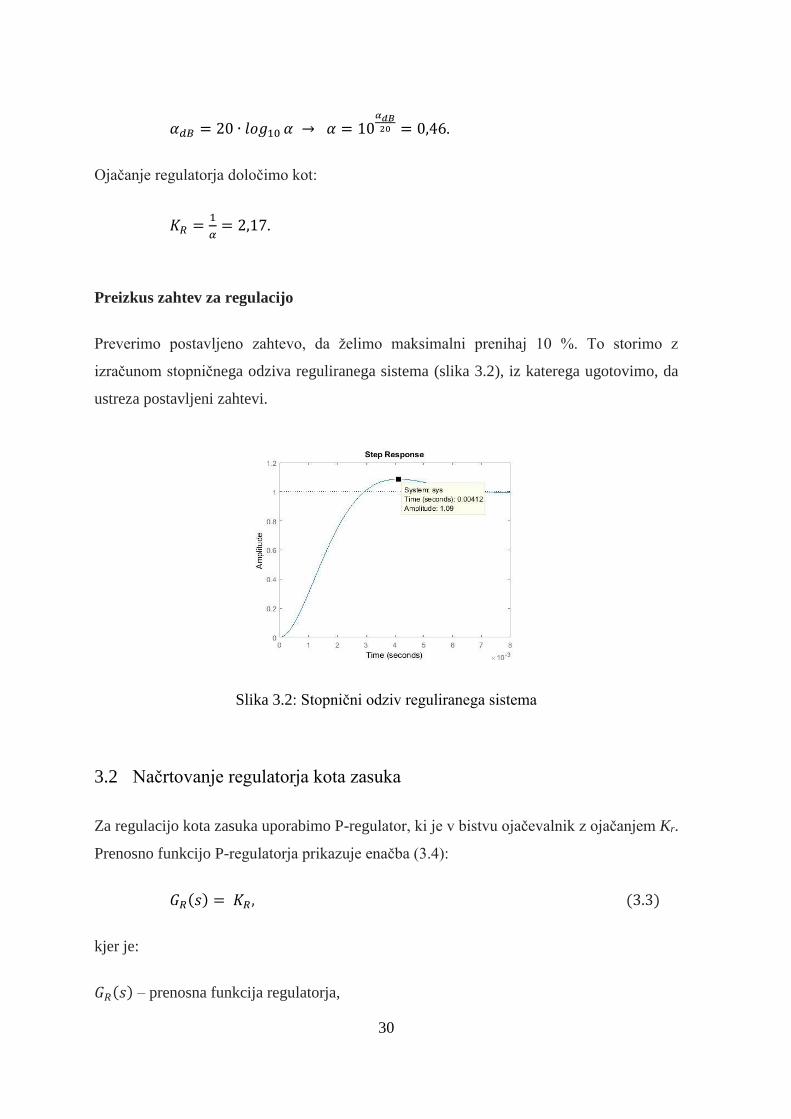
Preizkus zahtev za regulacijo
Preverimo postavljeno zahtevo, da želimo maksimalni prenihaj 10 %. To storimo z
izračunom stopničnega odziva reguliranega sistema (slika 3.2), iz katerega ugotovimo, da
ustreza postavljeni zahtevi.
Slika 3.2: Stopnični odziv reguliranega sistema
3.2 Načrtovanje regulatorja kota zasuka
Za regulacijo kota zasuka uporabimo P-regulator, ki je v bistvu ojačevalnik z ojačanjem Kr.
Prenosno funkcijo P-regulatorja prikazuje enačba (3.4):
𝐺𝑅(𝑠) = 𝐾𝑅 , (3.3)
kjer je:
𝐺𝑅(𝑠) – prenosna funkcija regulatorja,
31
𝐾𝑅 – ojačanje regulatorja.
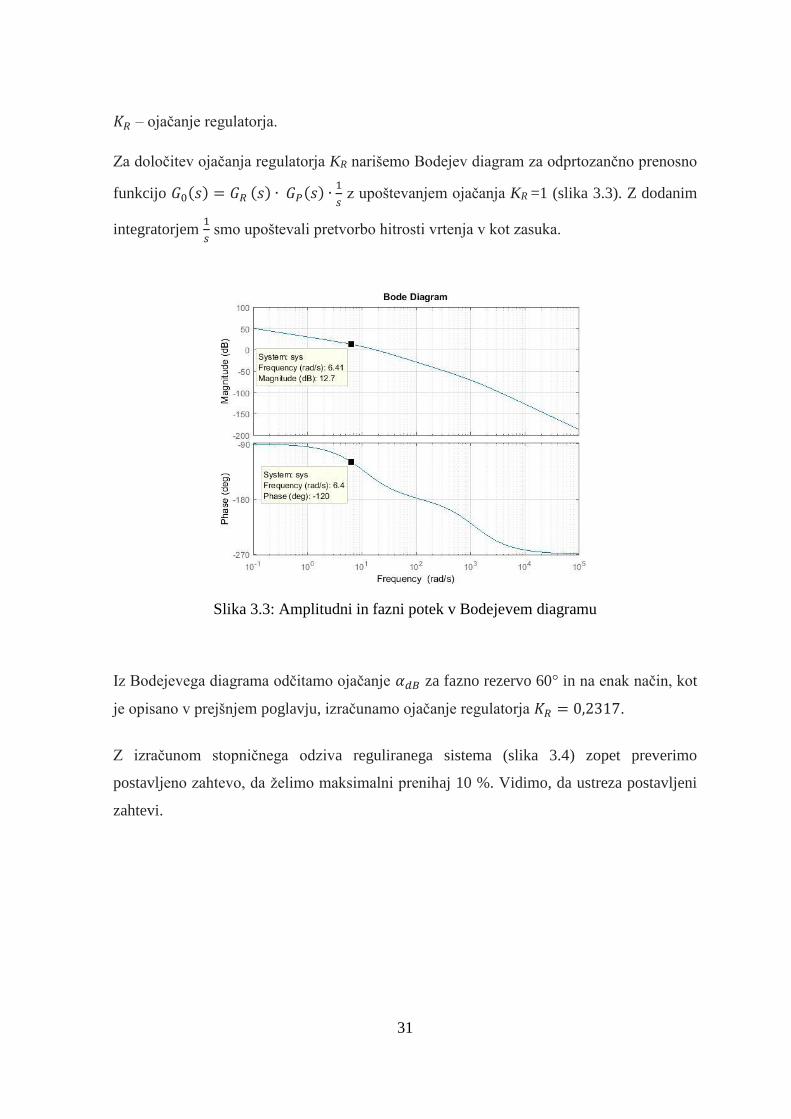
Za določitev ojačanja regulatorja KR narišemo Bodejev diagram za odprtozančno prenosno
funkcijo 𝐺0(𝑠) = 𝐺𝑅 (𝑠) ∙ 𝐺𝑃(𝑠) ∙1
𝑠 z upoštevanjem ojačanja KR =1 (slika 3.3). Z dodanim
integratorjem 1
𝑠 smo upoštevali pretvorbo hitrosti vrtenja v kot zasuka.
Slika 3.3: Amplitudni in fazni potek v Bodejevem diagramu
Iz Bodejevega diagrama odčitamo ojačanje 𝛼𝑑𝐵 za fazno rezervo 60° in na enak način, kot
je opisano v prejšnjem poglavju, izračunamo ojačanje regulatorja 𝐾𝑅 = 0,2317.
Z izračunom stopničnega odziva reguliranega sistema (slika 3.4) zopet preverimo
postavljeno zahtevo, da želimo maksimalni prenihaj 10 %. Vidimo, da ustreza postavljeni
zahtevi.
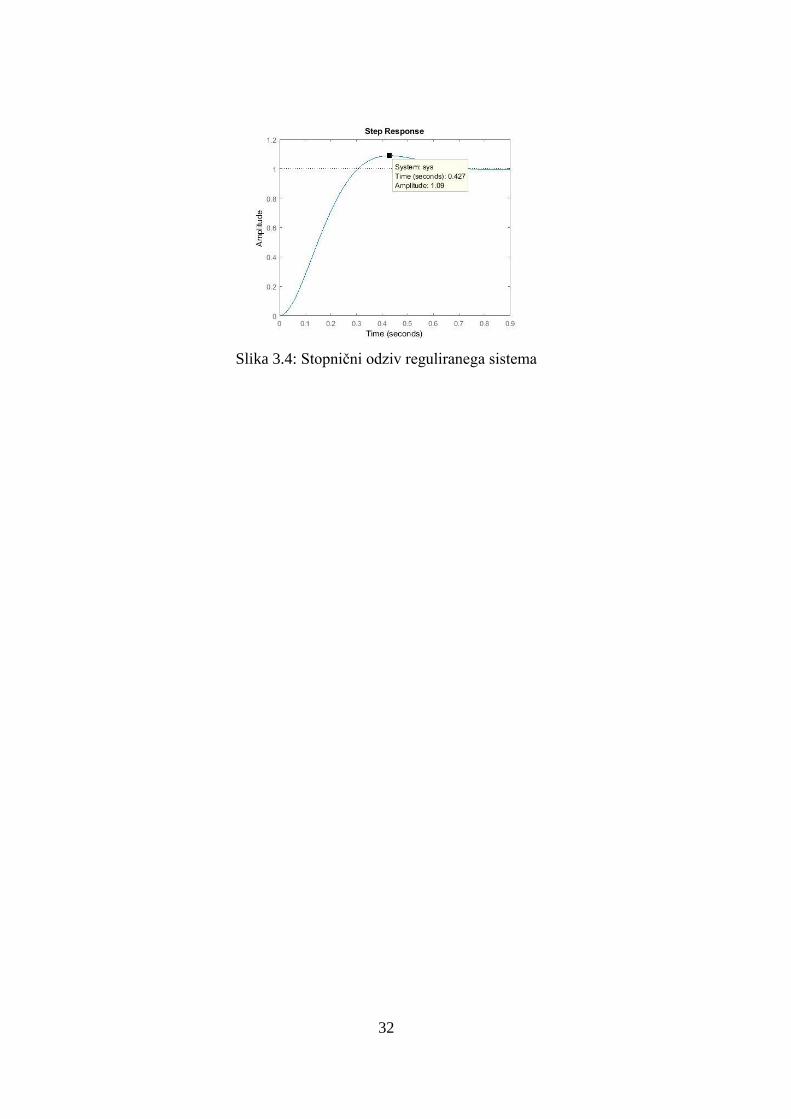
32
Slika 3.4: Stopnični odziv reguliranega sistema
33
4 Analiza regulacije
4.1 Regulacija hitrosti vrtenja
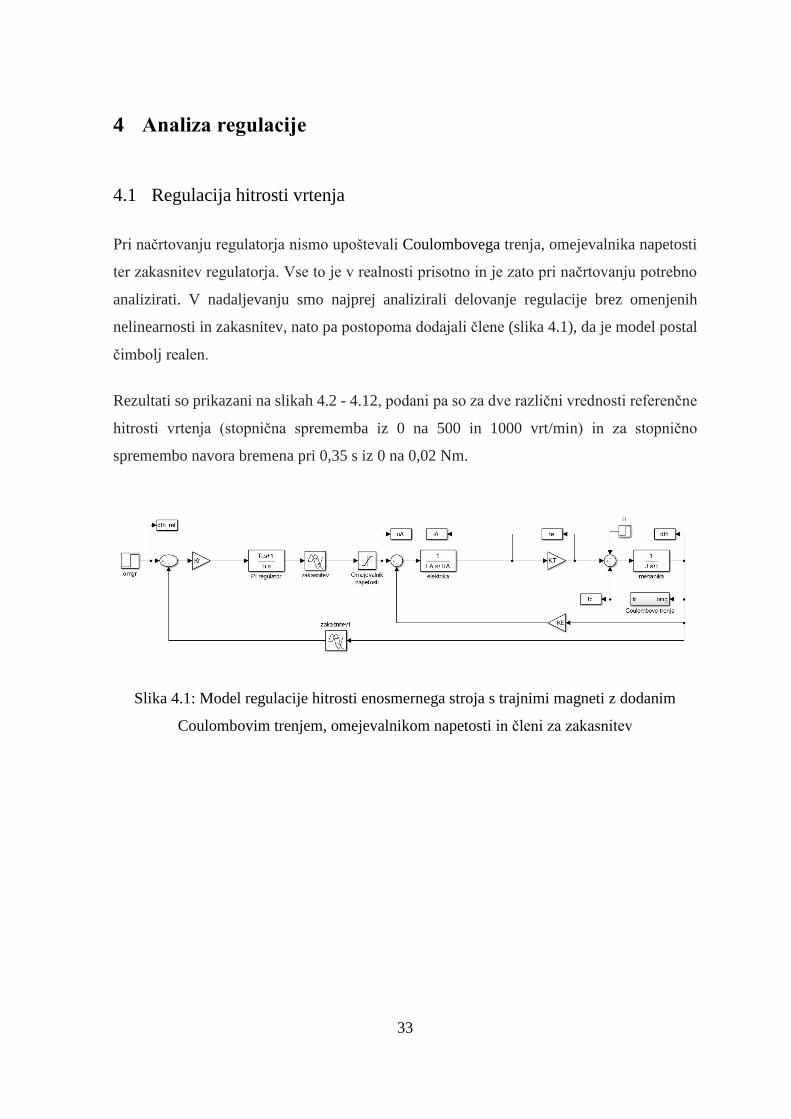
Pri načrtovanju regulatorja nismo upoštevali Coulombovega trenja, omejevalnika napetosti
ter zakasnitev regulatorja. Vse to je v realnosti prisotno in je zato pri načrtovanju potrebno
analizirati. V nadaljevanju smo najprej analizirali delovanje regulacije brez omenjenih
nelinearnosti in zakasnitev, nato pa postopoma dodajali člene (slika 4.1), da je model postal
čimbolj realen.
Rezultati so prikazani na slikah 4.2 - 4.12, podani pa so za dve različni vrednosti referenčne
hitrosti vrtenja (stopnična sprememba iz 0 na 500 in 1000 vrt/min) in za stopnično
spremembo navora bremena pri 0,35 s iz 0 na 0,02 Nm.
Slika 4.1: Model regulacije hitrosti enosmernega stroja s trajnimi magneti z dodanim
Coulombovim trenjem, omejevalnikom napetosti in členi za zakasnitev
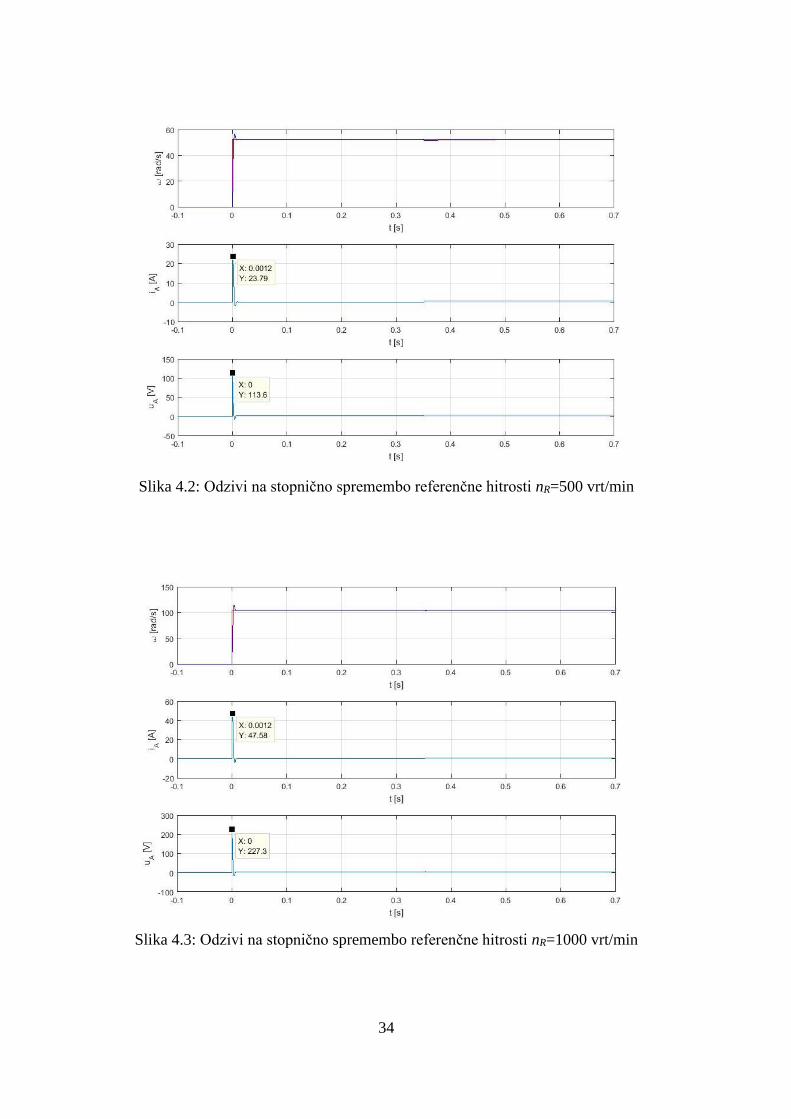
34
Slika 4.2: Odzivi na stopnično spremembo referenčne hitrosti nR=500 vrt/min
Slika 4.3: Odzivi na stopnično spremembo referenčne hitrosti nR=1000 vrt/min
35
Na sliki 4.2 in 4.3 vidimo, da tok in napetost ob spremembi reference zelo narasteta,
sprememba bremena pa nima velikega vpliva, zato v nadaljevanju v model regulacije
vključimo omejevalnik napetosti, s katerim omejimo napetost na vrednost ±12 V.
Omejevalnika toka v simulacijo ne moremo vključiti, saj bi to pomenilo poseg v sam motor,
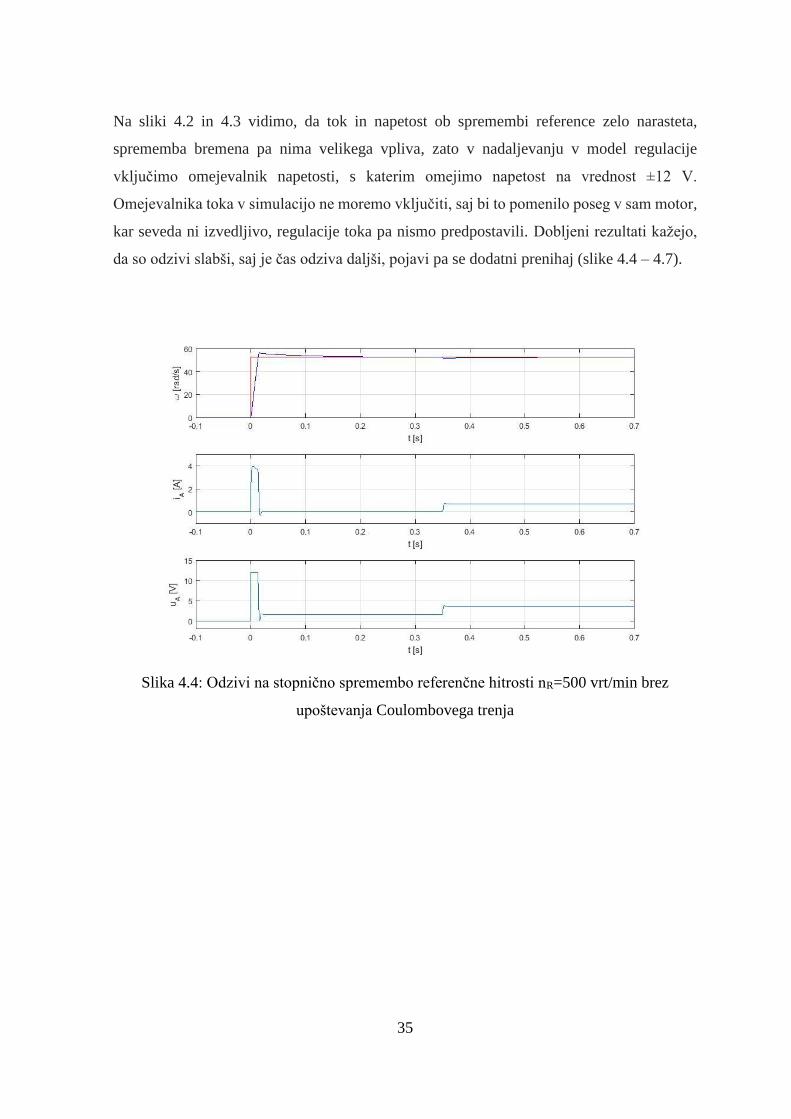
kar seveda ni izvedljivo, regulacije toka pa nismo predpostavili. Dobljeni rezultati kažejo,
da so odzivi slabši, saj je čas odziva daljši, pojavi pa se dodatni prenihaj (slike 4.4 – 4.7).
Slika 4.4: Odzivi na stopnično spremembo referenčne hitrosti nR=500 vrt/min brez
upoštevanja Coulombovega trenja
36
Slika 4.5: Odzivi na stopnično spremembo referenčne hitrosti nR=500 vrt/min
z upoštevanjem Coulombovega trenja
Slika 4.6: Odzivi na stopnično spremembo referenčne hitrosti nR=1000 vrt/min
brez upoštevanja Coulombovega trenja
37
Slika 4.7: Odzivi na stopnično spremembo referenčne hitrosti nR=1000 vrt/min
z upoštevanjem Coulombovega trenja
Na slikah 4.4 - 4.7 vidimo, da v primeru neupoštevanja Coulombovega trenja hitrost prej
doseže referenčno vrednost. Tok in napetost v ustaljenem stanju pa imata nižje vrednosti.
Ob vključitvi bremena pri času 0,35 s se tok in napetost ustrezno povečata.
V model regulacije vključimo še zakasnilne člene, kjer smo predpostavili zakasnitev 0,5 ms.
Rezultati so prikazani na slikah 4.8 in 4.9.
38
Slika 4.8: Odzivi na stopnično spremembo referenčne hitrosti nR=500 vrt/min
z upoštevanjem Coulombovega trenja
Slika 4.9: Odzivi na stopnično spremembo referenčne hitrosti nR=1000 vrt/min
z upoštevanjem Coulombovega trenja
Iz slik 4.8 in 4.9 ugotovimo, da zakasnitev povzroči prenihaje v odzivih. Te lahko odpravimo
tako, da zmanjšamo ojačanje regulatorja. Ob 10-krat zmanjšanem ojačanju, ki znaša 0,217,
39
dobimo zadovoljive odzive (slika 4.10), pri katerih ni prenihaja, čas regulacije pa znaša
približno 100 ms.
Slika 4.10: Odziv na stopnično spremembo referenčne hitrosti nR=1000 vrt/min z
zmanjšanim ojačanjem regulatorja za 10-krat
4.2 Regulator kota zasuka
Simulacijska shema je prikazana na sliki 4.11, poleg linearnega modela motorja pa smo
upoštevali samo Coulombovo trenje.
Slika 4.11: Model regulacije kota zasuka enosmernega motorja s trajnimi magneti
40
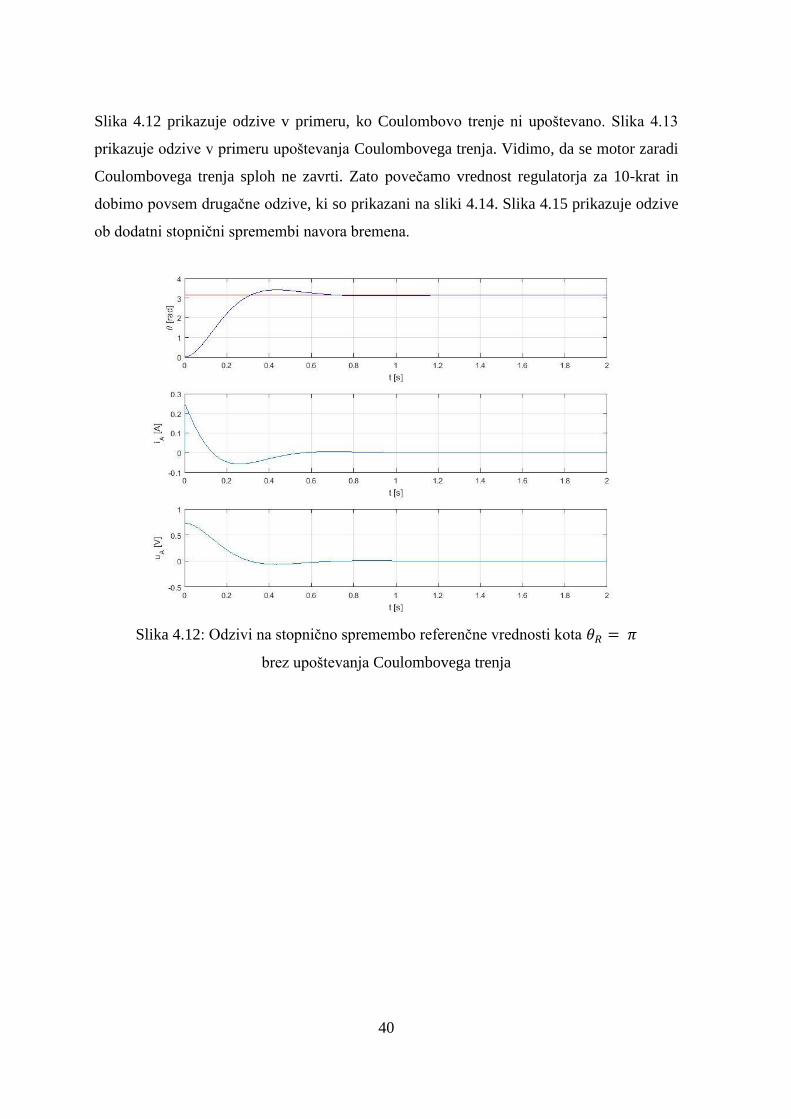
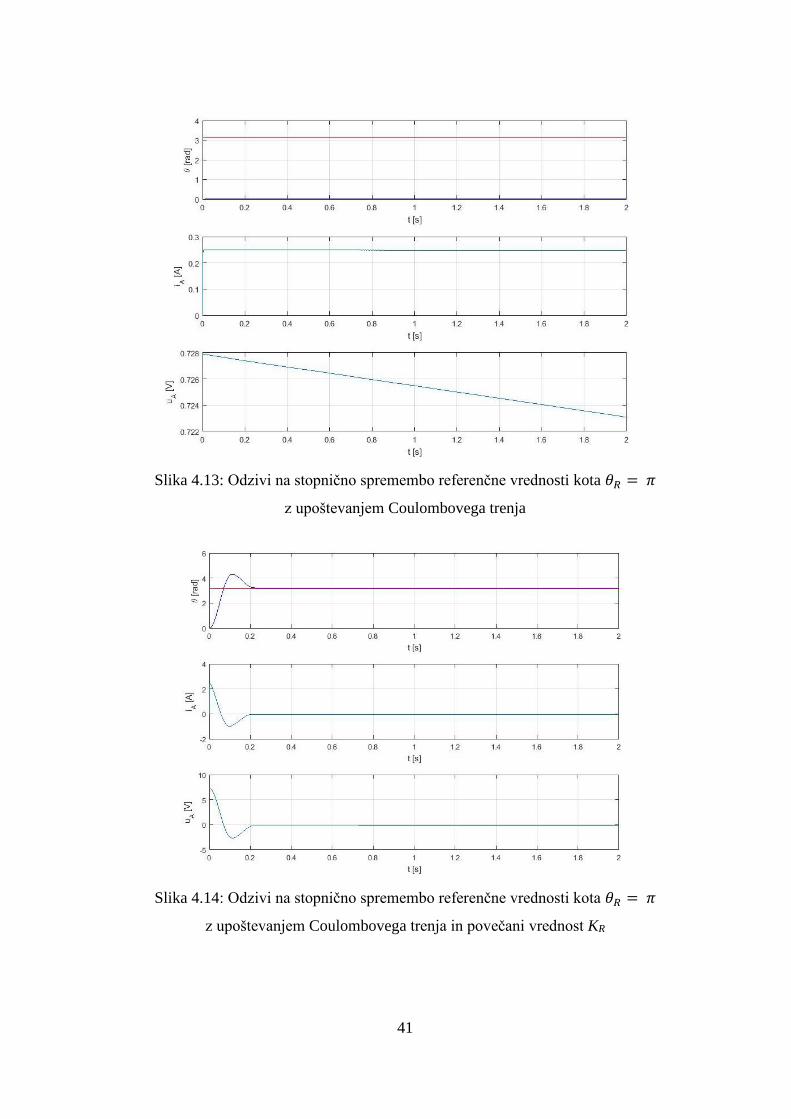
Slika 4.12 prikazuje odzive v primeru, ko Coulombovo trenje ni upoštevano. Slika 4.13
prikazuje odzive v primeru upoštevanja Coulombovega trenja. Vidimo, da se motor zaradi
Coulombovega trenja sploh ne zavrti. Zato povečamo vrednost regulatorja za 10-krat in
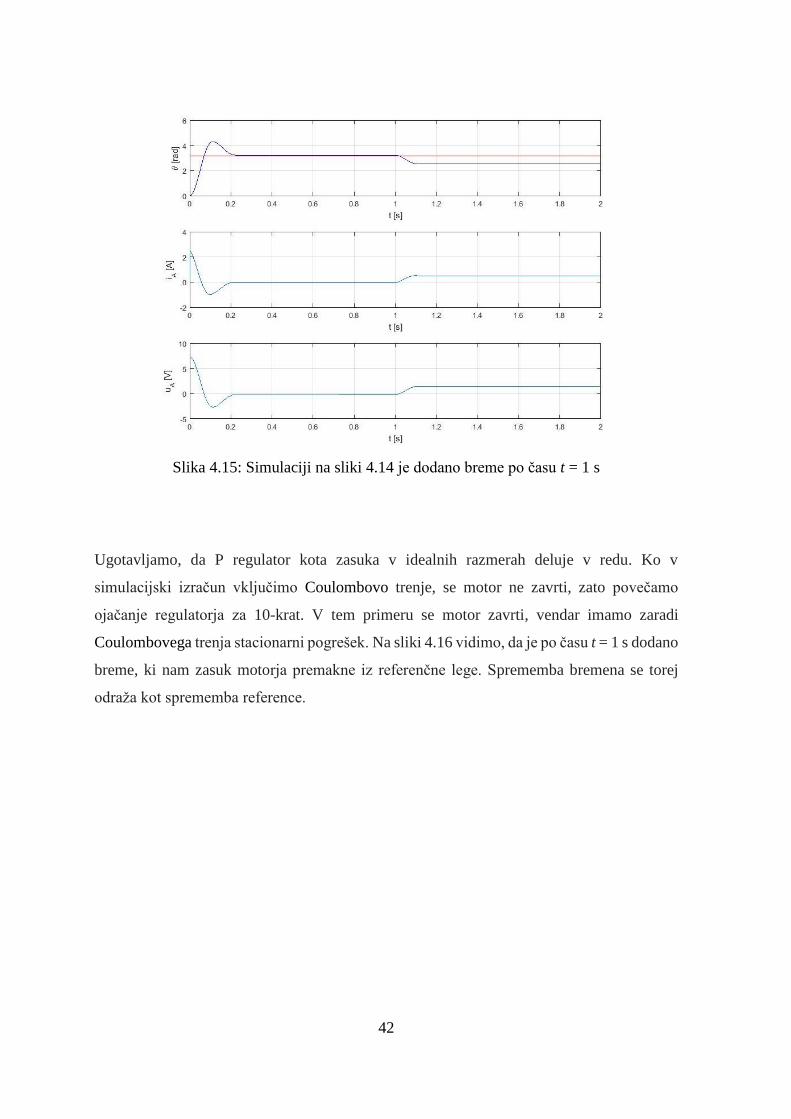
dobimo povsem drugačne odzive, ki so prikazani na sliki 4.14. Slika 4.15 prikazuje odzive
ob dodatni stopnični spremembi navora bremena.
Slika 4.12: Odzivi na stopnično spremembo referenčne vrednosti kota 𝜃𝑅 = 𝜋
brez upoštevanja Coulombovega trenja
41
Slika 4.13: Odzivi na stopnično spremembo referenčne vrednosti kota 𝜃𝑅 = 𝜋
z upoštevanjem Coulombovega trenja
Slika 4.14: Odzivi na stopnično spremembo referenčne vrednosti kota 𝜃𝑅 = 𝜋
z upoštevanjem Coulombovega trenja in povečani vrednost KR
42
Slika 4.15: Simulaciji na sliki 4.14 je dodano breme po času t = 1 s
Ugotavljamo, da P regulator kota zasuka v idealnih razmerah deluje v redu. Ko v
simulacijski izračun vključimo Coulombovo trenje, se motor ne zavrti, zato povečamo
ojačanje regulatorja za 10-krat. V tem primeru se motor zavrti, vendar imamo zaradi
Coulombovega trenja stacionarni pogrešek. Na sliki 4.16 vidimo, da je po času t = 1 s dodano
breme, ki nam zasuk motorja premakne iz referenčne lege. Sprememba bremena se torej
odraža kot sprememba reference.
43
5 Izvedba regulacije z industrijskim krmilnikom
5.1 Sistem s krmilnikom Siemens S7-314 IFM
Slika 5.1: Regulacijski sistem s krmilnikom Siemens S7-314 IFM
Za izvedbo regulacije smo uporabili regulacijski sistem, zgrajen na osnovi programirljivega
logičnega krmilnika Siemens S7-314 IFM, sestavljenega iz:
- napajalnika PS307 5A,
- krmilnika CPU314 IFM in
- komunikacijskega modula CP343-1.
5.2 SIMATIC Step 7
Programsko okolje SIMATIC Step 7 vsebuje različna programska orodja. S programskim
orodjem Step 7 smo:
- konfigurirali strojno opremo,
- konfigurirali mrežno komunikacijo,
- izdelali program in
- preverili delovanje programa.
44
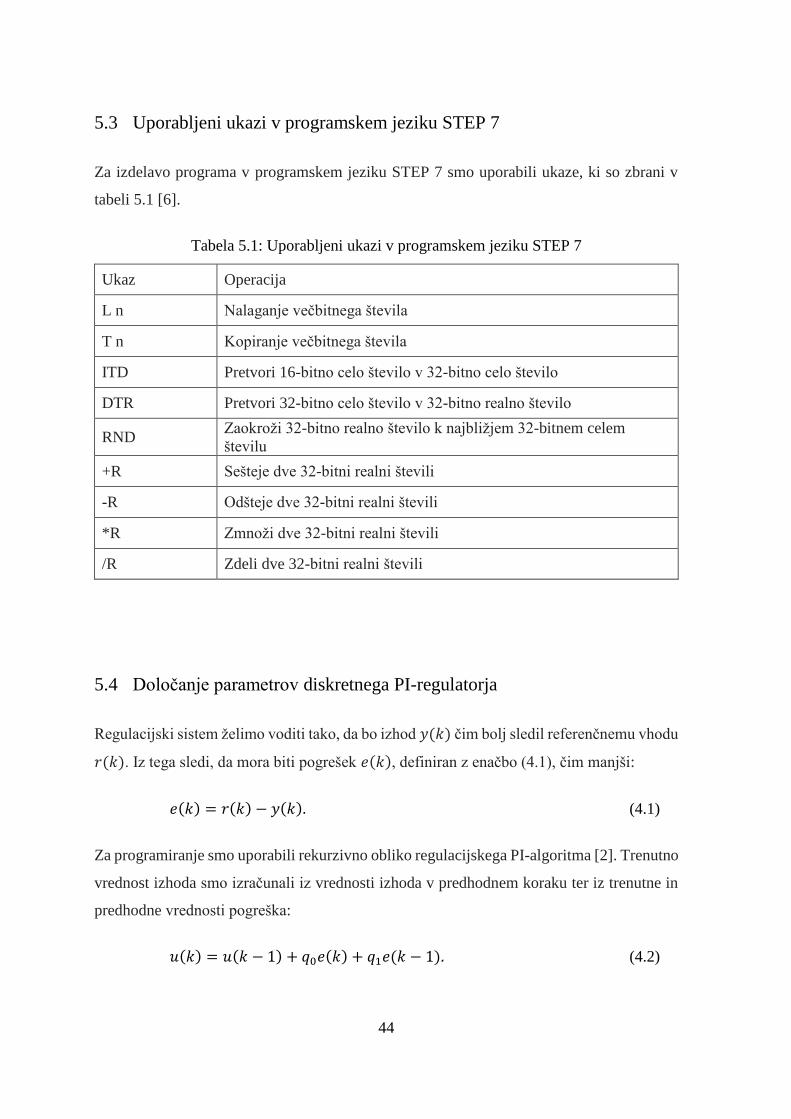
5.3 Uporabljeni ukazi v programskem jeziku STEP 7
Za izdelavo programa v programskem jeziku STEP 7 smo uporabili ukaze, ki so zbrani v
tabeli 5.1 [6].
Tabela 5.1: Uporabljeni ukazi v programskem jeziku STEP 7
Ukaz Operacija
L n Nalaganje večbitnega števila
T n Kopiranje večbitnega števila
ITD Pretvori 16-bitno celo število v 32-bitno celo število
DTR Pretvori 32-bitno celo število v 32-bitno realno število
RND Zaokroži 32-bitno realno število k najbližjem 32-bitnem celem
številu
+R Sešteje dve 32-bitni realni števili
-R Odšteje dve 32-bitni realni števili
*R Zmnoži dve 32-bitni realni števili
/R Zdeli dve 32-bitni realni števili
5.4 Določanje parametrov diskretnega PI-regulatorja
Regulacijski sistem želimo voditi tako, da bo izhod 𝑦(𝑘) čim bolj sledil referenčnemu vhodu
𝑟(𝑘). Iz tega sledi, da mora biti pogrešek 𝑒(𝑘), definiran z enačbo (4.1), čim manjši:
𝑒(𝑘) = 𝑟(𝑘) − 𝑦(𝑘). (4.1)
Za programiranje smo uporabili rekurzivno obliko regulacijskega PI-algoritma [2]. Trenutno
vrednost izhoda smo izračunali iz vrednosti izhoda v predhodnem koraku ter iz trenutne in
predhodne vrednosti pogreška:
𝑢(𝑘) = 𝑢(𝑘 − 1) + 𝑞0𝑒(𝑘) + 𝑞1𝑒(𝑘 − 1). (4.2)

45
Parametra regulatorja 𝑞0 in 𝑞1 izračunamo z enačbama (4.3) in (4.4):
𝑞0 = 𝐾(1 +𝑇0
2𝑇𝑖) (4.3)
𝑞1 = −𝐾(1 −𝑇0
2𝑇𝑖) (4.4)
kjer je:
T0 – interval vzorčenja,
K – faktor ojačanja,
Ti – časovna konstanta integratorja.
Pri določitvi faktorja ojačenja nismo upoštevali merilnika kotne hitrosti, ki znaša
0,03 Vs/rad. Preračunano ojačenje PI-regulatorja za regulacijo motorja z merilnikom hitrosti
tako znaša:
K = 0,217/0,03 = 7,23.
Ker pa pri preliminarnem preizkusu regulacija s takšno vrednostjo ojačenja ni delovala, smo
uporabili zmanjšano vrednost K. Razlog predstavlja nemodelirana dinamika in nelinearnost
regulacijskega procesa in časovna diskretizacija.
Za vrednosti T0 = 5 ms, Ti = 0,08s, K=1 smo izračunali vrednosti parametrov:
q0=1,03125, q1=-0,96875.
5.5 Rezultati
Na slikah 4.2, 4.3 in 4.4. so prikazani odzivi fizikalnih veličin regulacijskega sistema na
stopnično spremembo referenčne vrednosti sistema. Ojačanje regulatorja je bilo K=1. V
46
primeru, da ojačanje povečamo, začne motor oscilirati, če pa ojačanje zmanjšamo, se motor
ne zavrti zaradi prisotnega Coulombovega trenja.
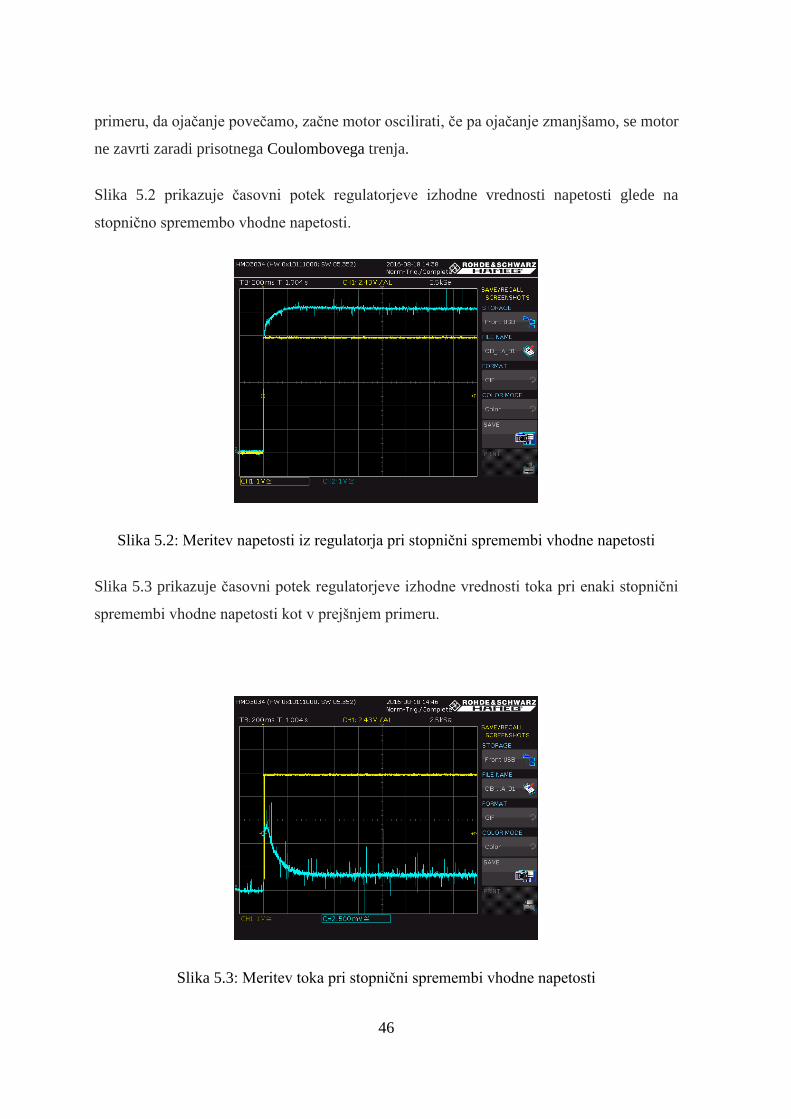
Slika 5.2 prikazuje časovni potek regulatorjeve izhodne vrednosti napetosti glede na
stopnično spremembo vhodne napetosti.
Slika 5.2: Meritev napetosti iz regulatorja pri stopnični spremembi vhodne napetosti
Slika 5.3 prikazuje časovni potek regulatorjeve izhodne vrednosti toka pri enaki stopnični
spremembi vhodne napetosti kot v prejšnjem primeru.
Slika 5.3: Meritev toka pri stopnični spremembi vhodne napetosti
47
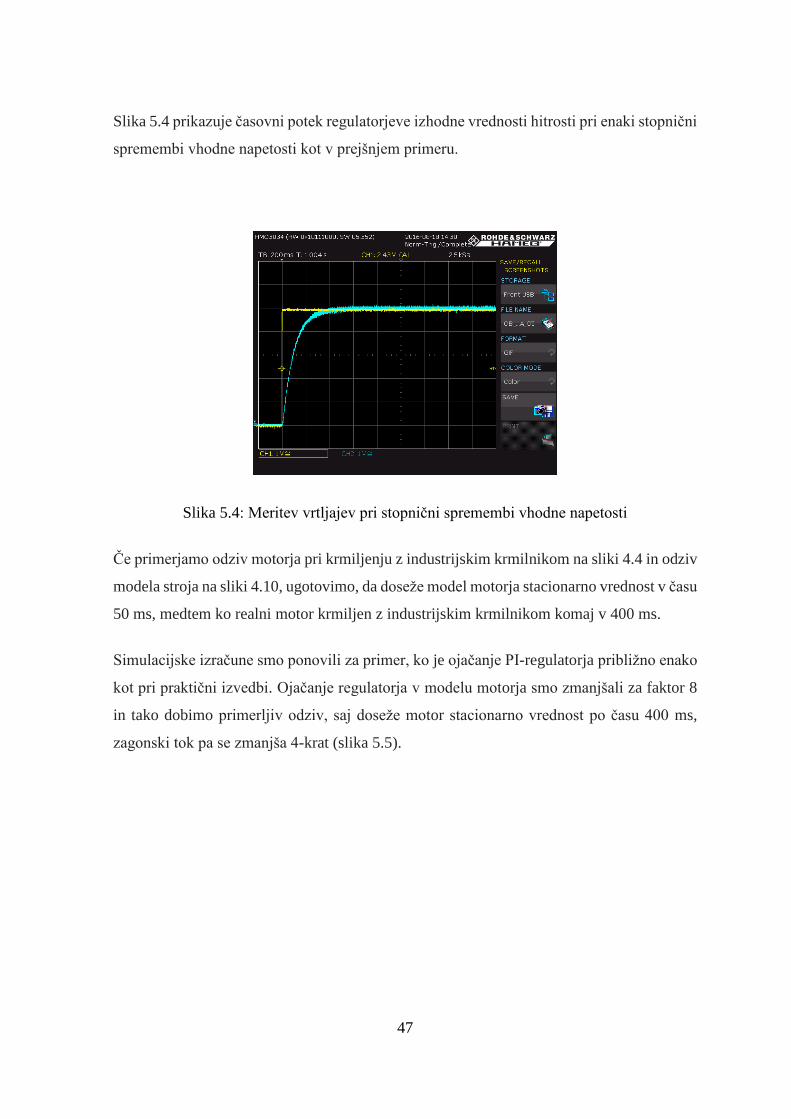
Slika 5.4 prikazuje časovni potek regulatorjeve izhodne vrednosti hitrosti pri enaki stopnični
spremembi vhodne napetosti kot v prejšnjem primeru.
Slika 5.4: Meritev vrtljajev pri stopnični spremembi vhodne napetosti
Če primerjamo odziv motorja pri krmiljenju z industrijskim krmilnikom na sliki 4.4 in odziv
modela stroja na sliki 4.10, ugotovimo, da doseže model motorja stacionarno vrednost v času
50 ms, medtem ko realni motor krmiljen z industrijskim krmilnikom komaj v 400 ms.
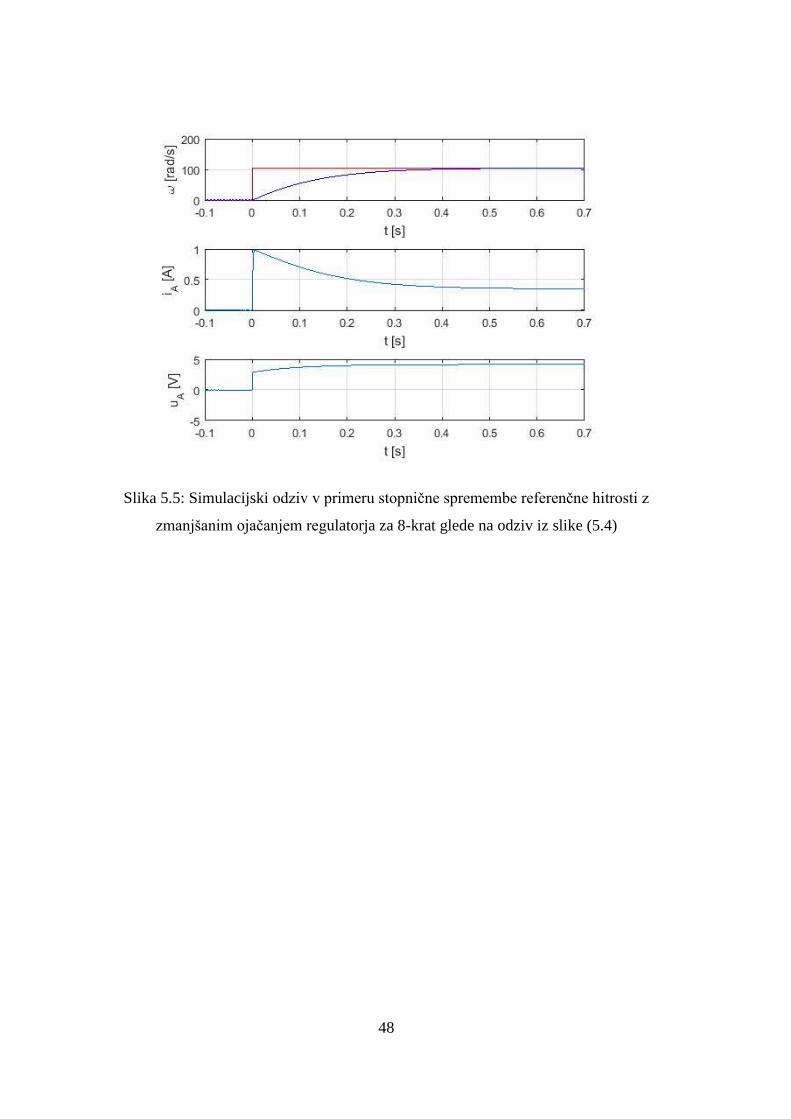
Simulacijske izračune smo ponovili za primer, ko je ojačanje PI-regulatorja približno enako
kot pri praktični izvedbi. Ojačanje regulatorja v modelu motorja smo zmanjšali za faktor 8
in tako dobimo primerljiv odziv, saj doseže motor stacionarno vrednost po času 400 ms,
zagonski tok pa se zmanjša 4-krat (slika 5.5).
48
Slika 5.5: Simulacijski odziv v primeru stopnične spremembe referenčne hitrosti z
zmanjšanim ojačanjem regulatorja za 8-krat glede na odziv iz slike (5.4)

49
6 Zaključek
V okviru diplomskega dela smo opisali metode za izračun parametrov enosmernega stroja s
trajnimi magneti in izvedli vse potrebne meritve. Opisali smo teorijo za določitev regulatorja
za hitrosti vrtenja in kota zasuka stroja ter simulacijsko preverili odzive pri dodanih
nelinearnostih, ki v praksi nastopajo. Ugotovili smo, da je za zadovoljiv odziv motorja
potrebna primerna izbira ojačanja regulatorja. To smo preizkusili tudi z industrijskim
krmilnikom, kjer nam izbira prevelikega ojačanja povzroči oscilacije, če pa ojačanje preveč
zmanjšamo, se motor zaradi Coulombovega trenja sploh ne zavrti.
50
7 Navajanje virov
7.1 Knjige
[1] Drago Dolinar, Gorazd Štumberger: Modeliranje in vodenje elektromehanskih sistemov,
Maribor: FERI, 2006
[2] Drago Dolinar, Dinamika linearnih sistemov in regulacije, Maribor: FERI, 2006
[3] Jožef Ritonja, Regulacijska tehnika, zbirka vaj, Maribor: FERI, 2006
7.2 Internetni viri
[4] http://electrical4u.com/dc-motor-or-direct-current-motor/
[5]http://www.electricaleasy.com/2014/12/permanent-magnet-dc-pmdc-motors.html
[6]http://w3.siemens.com/mcms/simatic-controller-software/en/step7/step7-
professional/pages/default.aspx
51
52
53
















