
Regulação Primária e Secundária de Sistemas Elétricos Usando o MATLAB
16
UNIVERSIDADE FEDERAL DO PARÁ Instituto de Tecnologia Faculdade de Engenharia Elétrica REGULAÇÃO PRIMÁRIA E SECUNDÁRIA DE SISTEMAS ELÉTRICOS USANDO O SIMULINK/MATLAB BELÉM – PA 2014
-
Upload
jorge-henrique-angelim -
Category
Documents
-
view
18 -
download
2
description
Simulações em Matlab da regulação primária e secundária.
Transcript of Regulação Primária e Secundária de Sistemas Elétricos Usando o MATLAB

UNIVERSIDADE FEDERAL DO PARÁ
Instituto de Tecnologia
Faculdade de Engenharia Elétrica
REGULAÇÃO PRIMÁRIA E SECUNDÁRIA
DE SISTEMAS ELÉTRICOS USANDO O
SIMULINK/MATLAB
BELÉM – PA
2014

UNIVERSIDADE FEDERAL DO PARÁ
Instituto de Tecnologia
Faculdade de Engenharia Elétrica
Jorge Henrique Costa Angelim – 201007140047
TRABALHO DE
GERAÇÃO DE ENERGIA REGULAÇÃO PRIMÁRIA E SECUNDÁRIA DE SISTEMAS ELÉTRICOS
USANDO O SIMULINK/MATLAB
BELÉM – PA
2014
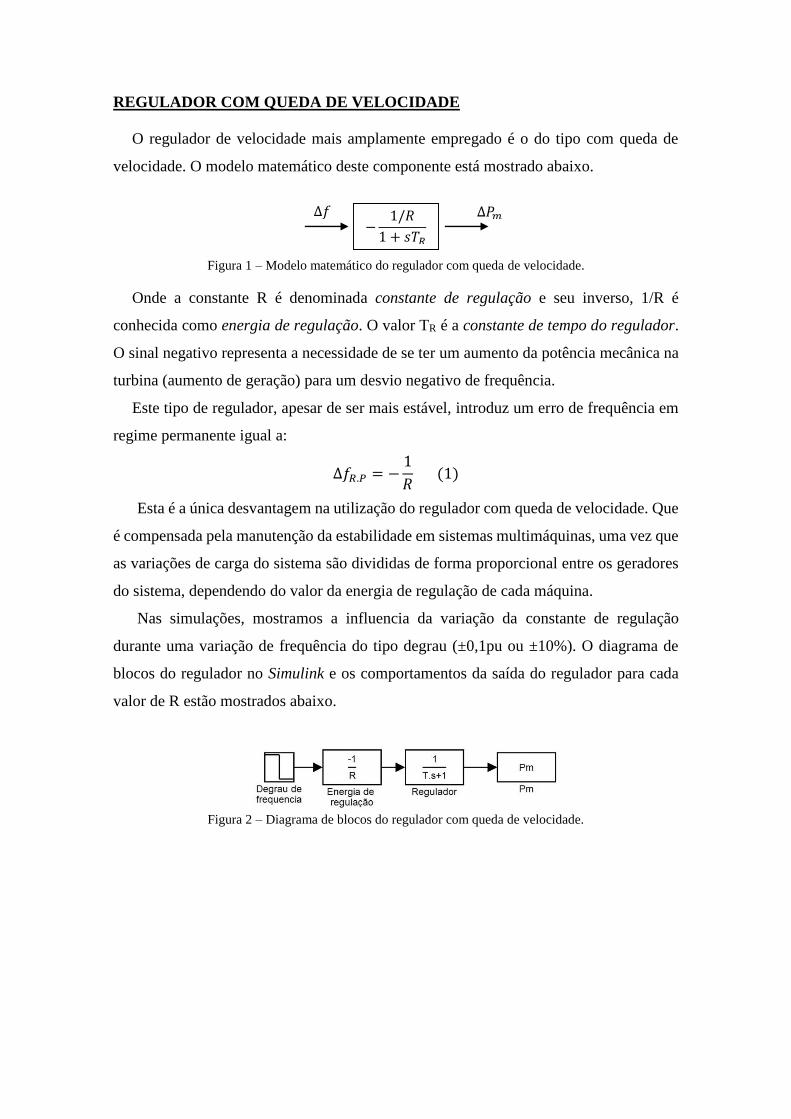
REGULADOR COM QUEDA DE VELOCIDADE
O regulador de velocidade mais amplamente empregado é o do tipo com queda de
velocidade. O modelo matemático deste componente está mostrado abaixo.
Figura 1 – Modelo matemático do regulador com queda de velocidade.
Onde a constante R é denominada constante de regulação e seu inverso, 1/R é
conhecida como energia de regulação. O valor TR é a constante de tempo do regulador.
O sinal negativo representa a necessidade de se ter um aumento da potência mecânica na
turbina (aumento de geração) para um desvio negativo de frequência.
Este tipo de regulador, apesar de ser mais estável, introduz um erro de frequência em
regime permanente igual a:
Δ𝑓𝑅.𝑃 = −1
𝑅 (1)
Esta é a única desvantagem na utilização do regulador com queda de velocidade. Que
é compensada pela manutenção da estabilidade em sistemas multimáquinas, uma vez que
as variações de carga do sistema são divididas de forma proporcional entre os geradores
do sistema, dependendo do valor da energia de regulação de cada máquina.
Nas simulações, mostramos a influencia da variação da constante de regulação
durante uma variação de frequência do tipo degrau (±0,1pu ou ±10%). O diagrama de
blocos do regulador no Simulink e os comportamentos da saída do regulador para cada
valor de R estão mostrados abaixo.
Figura 2 – Diagrama de blocos do regulador com queda de velocidade.
−1/𝑅
1 + 𝑠𝑇𝑅
Δ𝑓 Δ𝑃𝑚

Figura 3 – Variação da potência mecânica na saída do regulador após um desvio de frequência negativo
de 10% do tipo degrau.
Figura 4 – Variação da potência mecânica na saída do regulador após um desvio de frequência positivo
de 10% do tipo degrau.
A partir dos gráficos, percebemos que a energia de regulação indica qual máquina tem
maior capacidade de absorver as variações de frequência do sistema, de forma que possa
aumentar sua geração e manter a estabilidade de frequência em um sistema com várias
máquinas.
O efeito da variação do valor da constante de tempo do regulador é mostrado abaixo.
Figura 5 – Variação da constante de tempo do regulador.
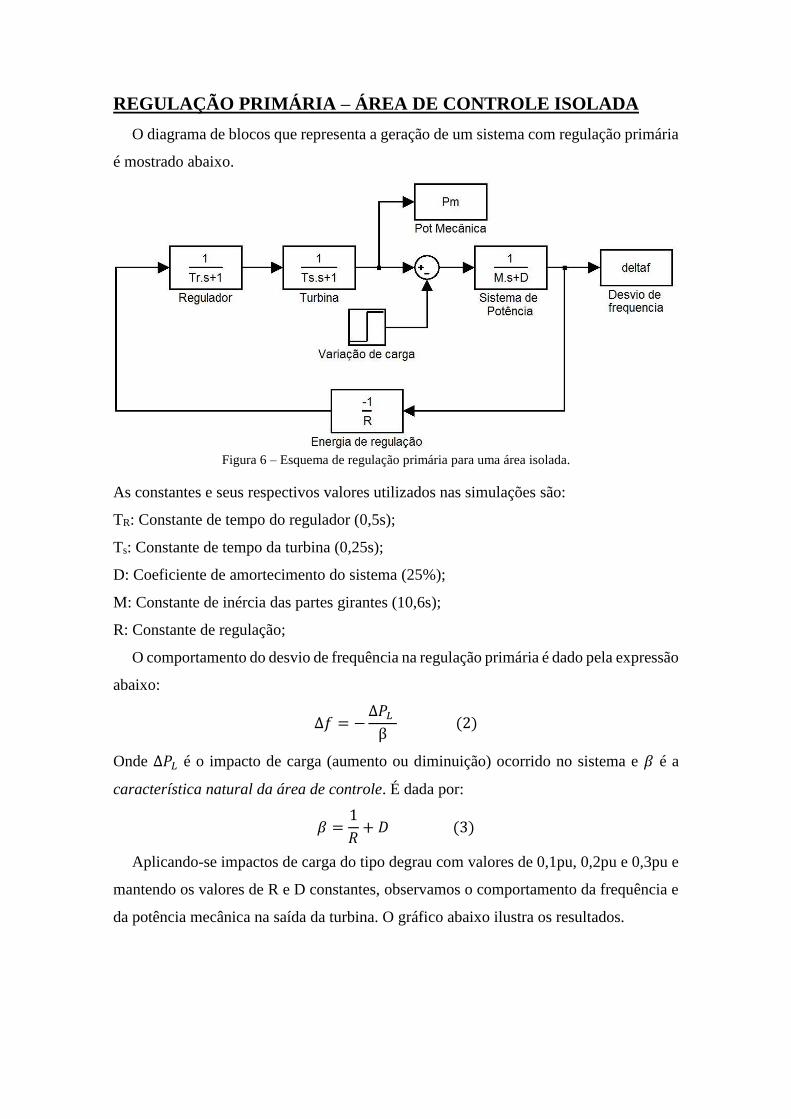
REGULAÇÃO PRIMÁRIA – ÁREA DE CONTROLE ISOLADA
O diagrama de blocos que representa a geração de um sistema com regulação primária
é mostrado abaixo.
Figura 6 – Esquema de regulação primária para uma área isolada.
As constantes e seus respectivos valores utilizados nas simulações são:
TR: Constante de tempo do regulador (0,5s);
Ts: Constante de tempo da turbina (0,25s);
D: Coeficiente de amortecimento do sistema (25%);
M: Constante de inércia das partes girantes (10,6s);
R: Constante de regulação;
O comportamento do desvio de frequência na regulação primária é dado pela expressão
abaixo:
Δ𝑓 = −Δ𝑃𝐿
β (2)
Onde Δ𝑃𝐿 é o impacto de carga (aumento ou diminuição) ocorrido no sistema e 𝛽 é a
característica natural da área de controle. É dada por:
𝛽 =1
𝑅+ 𝐷 (3)
Aplicando-se impactos de carga do tipo degrau com valores de 0,1pu, 0,2pu e 0,3pu e
mantendo os valores de R e D constantes, observamos o comportamento da frequência e
da potência mecânica na saída da turbina. O gráfico abaixo ilustra os resultados.

Figura 7 – Desvio da frequência para diferentes valores de aumento de carga.
O comportamento da potência mecânica frente aos impactos positivos de carga está
mostrado abaixo.
Figura 8 - Comportamento da Potência mecânica na saída da turbina para diferentes valores de aumento
de carga.

Figura 9 – Desvio de frequência – Variação de R.
Figura 10 – Desvio da Potencia mecânica – Variação de R.

Figura 10 – Desvio de frequência – Variação de D.
Figura 11 – Desvio de potência mecânica – Variação de D.
Dos resultados das simulações, observa-se que os efeitos da variação do coeficiente de
amortecimento são muito discretos em comparação aos efeitos da mudança da energia de
regulação. De fato, a capacidade da carga de absorver sua própria variação é muito
pequena. Devido a isso, torna-se necessário utilizar os controladores que promovam uma
correção na fonte primária com o objetivo de se obter o equilíbrio entre a carga e a
geração.

REGULAÇÃO PRIMÁRIA - DUAS ÁREAS INTERLIGADAS
Para o caso de duas áreas de controle interligadas, as variações de carga serão
absorvidas através da energia cinética das partes girantes das duas áreas, provocando
desvio de frequência em ambas as áreas, mesmo na que não ocorreu acréscimo ou perda
de carga. O desvio de frequência, agora, dependerá também da potência de intercambio
que flui entre as áreas. O diagrama de blocos abaixo representa o sistema que será
avaliado aqui.
Figura 12 - Diagrama de blocos de duas áreas interligadas
Para o caso de duas áreas interligadas, o comportamento da frequência em regime
permanente é dado por:
Δ𝑓 = −∑ 𝑃𝐿
𝛽𝑠 (4)
Onde 𝛽𝑠 é a soma das características naturais das áreas. A potência de intercambio em
regime permanente é dada por:
Δ𝑃12 =Δ𝑃𝐿2𝛽1 − Δ𝑃𝐿1𝛽2
𝛽𝑠 (5)

Vamos comparar os efeitos no comportamento da frequência de operação frente a
diferentes valores de energia de regulação e coeficiente de amortecimento.
Primeiramente, aumentamos a energia de regulação na área 2, onde não houve aumento
de carga, que foi de 0,2pu na área 1. Simulamos para R2 = 0,5%, 10% e 15%. Os
resultados estão mostrados abaixo.
Figura 13 – Desvio de frequência na área 1 para diferentes valores de R na área 2.
Figura 14– Desvio de frequência na área 2 para diferentes valores de R na área 2.
Dos gráficos apresentados acima, conclui-se que a influência da energia de regulação
é de tornar uma área mais ou menos sensível às variações de frequência. De fato, ao se
aumentar o coeficiente de regulação da área 2, a característica natural equivalente do
sistema tende a ser menor e, de acordo com a equação 4, uma tendência a aumentar o
desvio de frequência em regime permanente da frequência. De fato, isto foi observado
nas simulações.
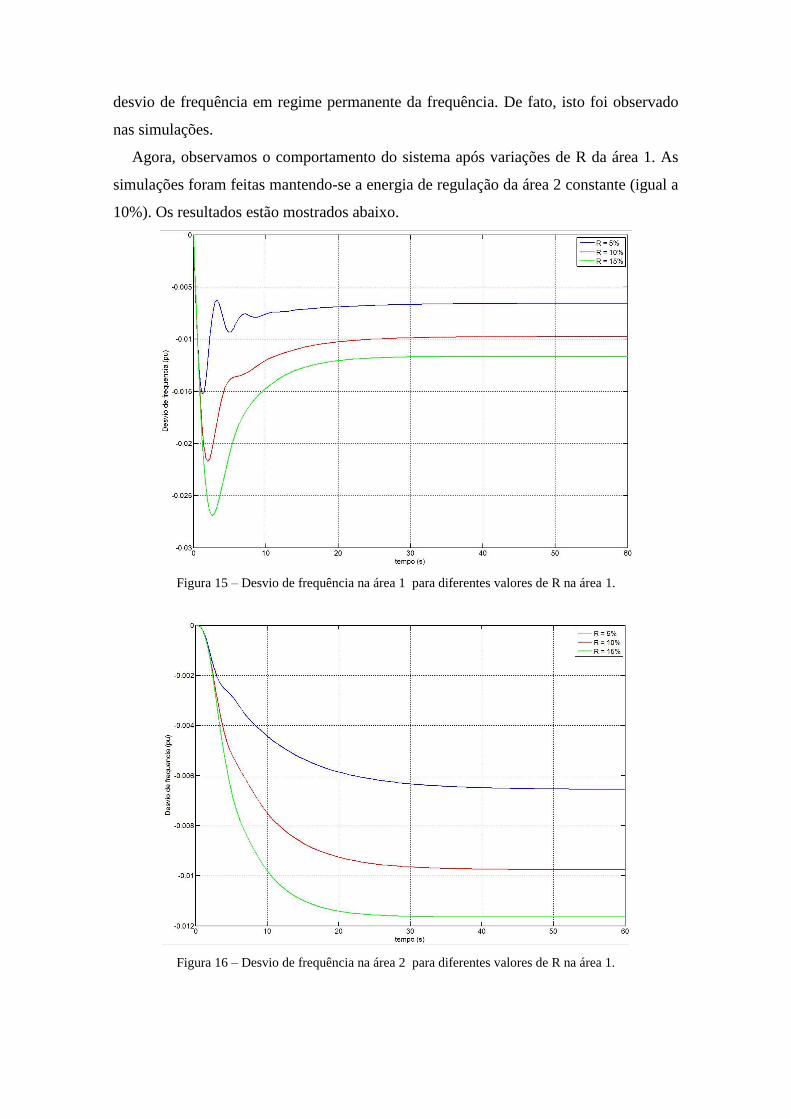
Agora, observamos o comportamento do sistema após variações de R da área 1. As
simulações foram feitas mantendo-se a energia de regulação da área 2 constante (igual a
10%). Os resultados estão mostrados abaixo.
Figura 15 – Desvio de frequência na área 1 para diferentes valores de R na área 1.
Figura 16 – Desvio de frequência na área 2 para diferentes valores de R na área 1.
Semelhante a análise anterior, alterando-se a energia de regulação da área 1 temos um
maior desvio de frequência nas duas áreas nos casos de aumento da constante de
regulação e, portanto, decréscimo na energia de regulação.
Vale ressaltar a diferença entre o comportamento transitório da frequência nas duas
áreas, que é mais amortecido na área 2, pois o impacto de carga ocorreu na área 1.
Entretanto, o valor de regime permanente é aproximadamente o mesmo nas duas áreas.
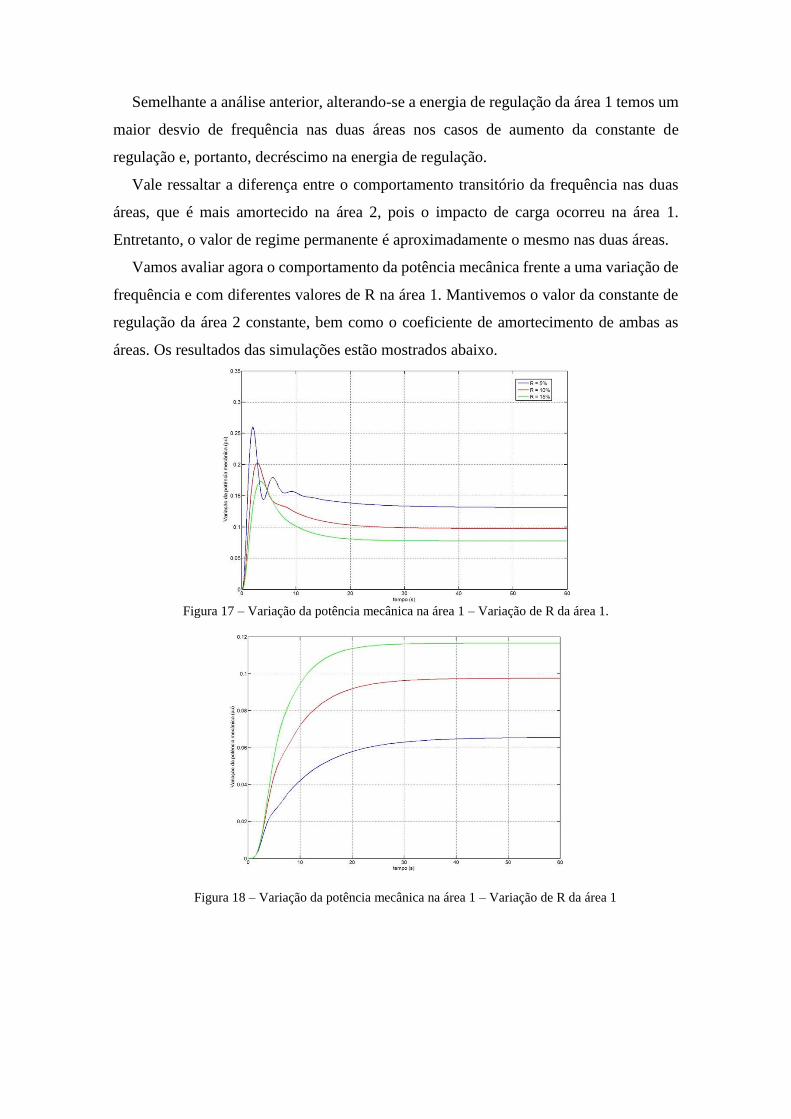
Vamos avaliar agora o comportamento da potência mecânica frente a uma variação de
frequência e com diferentes valores de R na área 1. Mantivemos o valor da constante de
regulação da área 2 constante, bem como o coeficiente de amortecimento de ambas as
áreas. Os resultados das simulações estão mostrados abaixo.
Figura 17 – Variação da potência mecânica na área 1 – Variação de R da área 1.
Figura 18 – Variação da potência mecânica na área 1 – Variação de R da área 1

Agora, vamos analisar os efeitos do coeficiente de amortecimento no comportamento
do sistema. Nesta análise, manteremos o mesmo valor da energia de regulação nas duas
áreas iguais (R = 10%).
Considerando uma constante de amortecimento de 50% na área 1, onde ocorreu uma
variação positiva de carga, vamos comparar os efeitos da variação deste parâmetro no
desvio de frequência no sistema.
Figura 19 - Desvio de frequência – área 1 - Variação de D.
Figura 20 - Desvio de frequência – área 2 - Variação de D1.

A variação do amortecimento na área 1 resulta numa discreta redução do desvio de
frequência. Este parâmetro representa o quanto a própria carga irá absorver da sua própria
variação, devido a dependência desta com a frequência. Esta absorção é muito pequena,
de forma que seus efeitos são discretos, como mostrado nos resultados.
A potencia de intercambio representa a ajuda enviada de uma área para outra, com a
finalidade de manter o equilíbrio carga – frequência do sistema. Aumentando a energia
de regulação da área 1, observamos o comportamento da potencia de intercambio entre
as áreas. O resultado está mostrado abaixo.
Figura 21 - Influência da energia de regulação da área 1 na potência de intercâmbio.
Já sabemos que a energia de regulação indica qual área é mais sensível a desvios de
frequência devido a variações de carga. Na figura 17, percebemos que ao aumentar a
energia de regulação (o mesmo que diminuir a constante de regulação R) da área 1, onde
houve impacto de carga, diminui-se a necessidade de envio de potência da área 2 para
área 1, pois a área onde ocorreu o aumento de carga consegue regular seu próprio desvio
de frequência, necessitando de menor potência de auxílio para realizar a regulação da
frequência.

REGULAÇÃO SECUNDÁRIA - ÁREA DE CONTROLE ISOLADA
A regulação secundária, também chamado de Controle Automático de Geração
(CAG), tem como objetivo fazer com que a frequência retorne ao valor original após o
impacto de carga. O diagrama de blocos
Figura 22 – Diagrama de blocos de uma área de controle isolada com regulação secundária
A constante de proporcionalidade da regulação secundária depende do tipo de
oscilação da frequência. Quanto maior seu valor, menor é o tempo para iniciar a ação
secundária e menor é o amortecimento. Utiliza-se valores maiores de amortecimento
diminuindo-se o valor dessa constante, evitando atuação desnecessária do CAG.
Nas simulações, comparamos os efeitos da variação da constante de proporcionalidade
𝜏 no desvio de frequência em regime permanente. Os resultados estão mostrados abaixo.
Figura 23 – Desvio de frequência devido a variações da constante de proporcionalidade do CAG.

Observa-se que a atuação da regulação secundária faz com que o desvio de frequência
retorne a zero, ou seja, a frequência volta ao seu valor normal de operação. Vale destacar
também os efeitos da mudança no valor de 𝜏, que tornou a resposta da regulação mais
rápida a medida que aumentou-se o valor dessa constante.
Figura 24 – Variação de potência mecânica devido a atuação da regulação secundária.


















