
REDES INDUSTRIALES -...
186
Transcript of REDES INDUSTRIALES -...




REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 5
TABLA DE CONTENIDOS
TAREA 1: Reconoce las características de los elementos de un sistema de
comunicación Industrial. .................................................................................. 9
Configura e instala un controlador lógico programable mediante la interfaz RS-232 .............. 10
FUNDAMENTO TEORICO ...................................................................................................... 17
Velocidad de transmisión ..................................................................................................... 17
Velocidad de Modulación ..................................................................................................... 18
Velocidad de modulación ..................................................................................................... 19
Transmisión de datos ........................................................................................................... 20
Tipos de transmisión ............................................................................................................ 22
Técnicas de transmisión ....................................................................................................... 23
Puerto serie .......................................................................................................................... 26
Tipos de cables y enlaces .................................................................................................... 31
Norma rs-485 ........................................................................................................................ 35
Conversores RS-232 a RS-485 ............................................................................................ 39
Norma RS-422 frente a RS-485 ........................................................................................... 42
Puerto Paralelo ..................................................................................................................... 43
Conectar dos ordenadores por Puerto Serie ...................................................................... 45
TAREA 2: Determina los principales protocolos de comunicación Industrial. ..... 48
Instala un transmisor en un Proceso Industrial ...................................................................... 48
Configura un transmisor en un proceso industrial .................................................................. 53
Instala un HART Comunicator en un Proceso Industrial ......................................................... 61
FUNDAMENTO TEORICO ...................................................................................................... 67
Buses de campo ................................................................................................................... 67
Buses de campo existentes .................................................................................................. 68
Buses de alta velocidad y baja funcionalidad ....................................................................... 68
Buses de alta velocidad y funcionalidad media .................................................................... 69
Buses de altas prestaciones ................................................................................................. 69
Buses para áreas de seguridad intrínseca ........................................................................... 70
Comparativa entre buses actuales ....................................................................................... 71

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 6
Comparativa general .......................................................................................................... 73
Comparativa de cableado ..................................................................................................... 74
Comparativa de número de nodos y acceso al medio ......................................................... 74
AS-i: Aktuator Sensor Interface ............................................................................................ 74
INTERBUS ........................................................................................................................... 76
CAN: Controller Area Networking ......................................................................................... 79
PROFIBUS ........................................................................................................................... 80
Arquitectura de Protocolo PROFIBUS .................................................................................. 82
TAREA 3: Determina y configura los elementos en una red Industrial. ............ 84
Instala un controlador lógico programable a una red Ethernet ............................................... 84
Configura un controlador lógico programable a una red Ethernet .......................................... 89
Configura un controlador lógico programable Micrologix a una red Ethernet ..................... 89
Configurar un controlador lógico Programable SIEMENS S7-1200 a una red
PROFINET ........................................................................................................................... 96
Cambio de la dirección IP de un controlador lógico programable AB Micrologix ............. 104
Realizar el cambio de la dirección IP de un controlador SIEMENS S71200 ...................... 109
FUNDAMENTO TEORICO .................................................................................................... 111
El modelo OSI .................................................................................................................... 111
Modelo general de comunicación ....................................................................................... 112
Origen, destino y paquetes de datos .................................................................................. 114
Medios ................................................................................................................................ 114
Protocolo ............................................................................................................................ 116
Evolución de las normas de networking de ISO ................................................................. 117
El modelo de referencia OSI .............................................................................................. 118
Capas del modelo de referencia OSI ................................................................................. 119
Encapsulamiento ................................................................................................................ 122
Nombres de los datos en cada capa del modelo OSI ........................................................ 124
El modelo de referencia TCP/IP ......................................................................................... 125
Comparación entre el modelo OSI y el modelo TCP/IP ..................................................... 127
Uso de los modelos OSI y TCP/IP ..................................................................................... 128

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 7
Red industrial ...................................................................................................................... 129
Tecnología de buses de Campo ......................................................................................... 129
Ventajas de un bus de campo ............................................................................................ 130
Desventajas de un bus de campo ...................................................................................... 130
Tipos de BUS ..................................................................................................................... 130
Clasificación de las redes Industriales. .............................................................................. 131
Componentes de las redes Industriales. ............................................................................ 131
Topología de redes Industriales ......................................................................................... 132
Beneficios de una red industrial ......................................................................................... 132
Redes Industriales con PLC ............................................................................................... 132
Soluciones con Ethernet ..................................................................................................... 132
TAREA 4: Implementa Proyectos de control basado en Computadora ............. 133
Desarrolla un sistema de supervisión y control para un proceso remoto ............................. 134
FUNDAMENTO TEORICO .................................................................................................... 148
Unidades Maestras (Master Terminal Units) ...................................................................... 151
Características de las unidades maestras .......................................................................... 151
Hardware y Software .......................................................................................................... 152
Hardware en sistemas de supervisión: PLC y PC. ............................................................. 153
Uso del PC como centro neural del MTU. .......................................................................... 155
Adquisición de Datos .......................................................................................................... 156
Human Machine Interface .................................................................................................. 158
WinCC ................................................................................................................................ 159
Estructura de WinCC .......................................................................................................... 161
Software de configuración .................................................................................................. 162
Software de Runtime .......................................................................................................... 162
SIMATIC WinCC Sm@rtServer (TIA Portal) ...................................................................... 162
TAREA 5: Implementa Control de procesos OPC .............................................. 164
Desarrolla un sistema de supervisión y control para un proceso remoto ............................. 165
FUNDAMENTO TEORICO .................................................................................................... 179
Arquitectura Cliente OPC / Servidor OPC .......................................................................... 180

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 8
Acceso de Datos OPC ........................................................................................................ 182
Gestión de Alarmas y Eventos ........................................................................................... 182
Acceso a Datos Históricos .................................................................................................. 182
Aplicaciones OPC ............................................................................................................... 182
Arquitectura General y Componentes ................................................................................ 183
Tipos de servidores OPC ................................................................................................... 183

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 9
TAREA 1: RECONOCE LAS CARACTERÍSTICAS DE LOS
ELEMENTOS DE UN SISTEMA DE COMUNICACIÓN INDUSTRIAL.
Una red de comunicación industrial es un sistema de transmisión de datos que permite el
intercambio de información entre equipos electrónicos, la información que pueden
intercambiar los equipos puede ser de lo más variada: correos electrónicos, imágenes,
mensajes, variables de proceso, registros de una base de datos, etc. Uno de los medios
de comunicación más empleado es la comunicación Serie, que desde los años sesenta no
ha cambiado prácticamente nada la configuración y los protocolos de comunicación del
puerto, por lo que todas las conexiones a través del puerto serie cumplen con la norma
RS-232 (Recommended Standard) de ElA (Electronic Industries Association).
Renombrada como EIA-232 en el año 1991, aunque sigue utilizándose mayoritariamente
la denominación primera, ya que está muy arraigada. En el ámbito internacional es
definida por CCITT, como la recomendación V.24. En la industria se emplea la norma
RS-485 que se encuentra normalizada en la norma ISO 8482 en 1993, esta norma
presenta varias ventajas sobre la norma RS-232, por ejemplo inmunidad al ruido y otras
características que veremos en este capítulo.
EQUIPOS Y MATERIALES:
Computador Pentium 4 o superior.
Sistema operativo Windows XP o superior.
Controlador lógico Programable Micrologix.
Programa de Automatización Industrial RS Logix500, RSLinx.
Cable de comunicación de datos (serie).
Conectores DB9.
ORDEN DE EJECUCION.
Instalación de los Programas de Automatización Industrial en la computadora.
Implementación de las tareas y comprobación del correcto funcionamiento.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 10
Configura e instala un controlador lógico programable mediante la interfaz RS-232
En esta actividad vamos a realizar la instalación de un controlador lógico programable
PLC Allen Bradley modelo Micrologix 1400 mediante la interfaz RS 232, mediante un
cable de comunicación Null módem el cual conectaremos al puerto COM de una
computadora personal (Workstation)
CABLE NULL MODEM. Null módem (modem nulo) es un método para conectar dos
terminales usando un cable serie RS-232. En la confección null módem las líneas de
transmisión y recepción están cruzadas. Existe más de una forma de realizar una
conexión null módem emplearemos la siguiente:
PROCEDIMIENTO:
Prepararemos el cable Null módem siguiendo los siguientes pasos a continuación:
1. Abrir los conectores DB9 y soldar con estaño los terminales con los que vamos a
trabajar.
2. Soldar con estaño el extremo de cada conductor del cable de datos, luego soldar a los
terminales del conector DB9.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 11
3. Finalmente proteger el conector con la funda y ajustar los tornillos de ambos extremos
del cable de comunicación de datos.
Siguiendo el procedimiento instalaremos el controlador lógico programable a la
computadora personal empleando el cable construido en la actividad anterior
1. Instalar una fuente de 24VDC al controlador lógico programable, el modelo Micrologix
1400 necesita una fuente externa, existen otros modelos como el Micrologix 1100 que
viene con una fuente integrada al controlador.
2. Esperar unos instantes hasta que el controlador inicialice su sistema operativo, cuando
esté listo se activara en el panel del controlador el indicador luminoso RUN

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 12
3. Retirar la cubierta e instalar el conector serie en el controlador, hacer lo mismo en la
computadora.
Existen controladores que no poseen puerto de comunicación serie, por ejemplo el
modelo Micrologix 1100 sólo incluye puerto Ethernet.
4. Abrir el programa de conectividad RSlinx, para instalar los drivers del controlador y
realizar comunicación entre la computadora y el puerto COM.
5. En el programa RSlinx seleccionar en la barra de menú la opción comunications/
configure drivers.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 13
6. En la ventana de configuración de drivers seleccionar en la lista desplegable el driver
RS-232 DF1 devices, luego presionar el botón Add New.
7. Instalaremos el driver de comunicación serie AB_DF1-1, en la ventada de
configuración de drivers podemos instalar los controladores que sean necesarios, por
ejemplo los controladores Ethernet si necesitamos descargar programas o controlar de
manera remota a nuestro controlador programable
8. Los parámetros se pueden configurar en la ventana RS-232 DF1 Devices, estos
parámetros serán puerto de comunicaciones, velocidad de transmisión, bit de paridad,
bit de parada, protocolo, etc. Podemos presionar el botón de autoconfiguración si
desconocemos alguno de estos parámetros.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 14
9. Presionemos el botón de Start para inicializar el driver instalado, en el caso de tener
varios drivers de comunicación instalados estos pueden activarse o detenerse según
nuestros requerimientos, luego presionar el botón Close.
10. Seleccionamos en la barra de menú la opción: Comunicatios/ RSWho para
inspeccionar la comunicación con nuestro controlador programable.
11. Observaremos en rama de comunicaciones de nuestra computadora, en este caso
“Workstation, PC05”, el driver AB_DF1, DH-485 el parámetro 01-Micrologix 1400 –
UNITITLED indicándonos que nuestro controlador está instalado y en línea.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 15
12. Después de comunicar el controlador programable, procedemos a leer en su memoria
de programa, en la barra de menú del programa RSLogix500 realizaremos la
configuración del driver de comunicación instalado, seleccionamos la opción Tools /
Options.
13. Configuramos el driver instalado en el programa RSLinx en la ventana System
Options, aquí seleccionamos en la lista desplegable la opción AB_DF1-1. Podemos
examinar si el controlador está en línea presionando el botón Who Active, también
podemos examinar el programa del controlador programable y subirlo al programa
RSLogix presionando el botón Upload

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 16
14. El programa empezara a subir el programa del controlador a la computadora, esto
permitirá realizar modificaciones o actualizaciones en el proceso en el que se
encuentra instalado el PLC.
15. El programa preguntara si deseamos conectar al controlador programable en línea,
aceptamos y presionamos el botón SI.
16. Finalmente procedemos a depurar el programa que se encuentra grabado en el PLC,
comprobando la comunicación entre la computadora (Workstation) y el controlador
programable (PLC) mediante el cable serie null modem, este procedimiento es similar
en otros casos, existiendo una diferencia al instalar el driver de comunicación.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 17
FUNDAMENTO TEÓRICO.
Aunque las comunicaciones digitales comenzaron su gran desarrollo a partir de la década
de los 50, mucha de la terminología y conocimientos básicos se han derivado del viejo
arte de la telegrafía. El baudio es un parámetro de naturaleza eléctrica que representa la
velocidad de modulación o velocidad básica de transmisión en impulsos por segundo; es
una medida de la capacidad de un canal para transportar impulsos digitales y está muy
relacionado con el ancho de banda del canal. Estrictamente hablando, el baudio es un
enunciado de la velocidad de señalización e indica cuántos impulsos de portadora son
apropiados para transmitir información por unidad de tiempo sobre un canal dado. Por
otro lado, el bit es la unidad de información y es una medida de la cantidad de información
contenida en un mensaje dado y que puede transmitirse mediante impulsos o en
cualquiera otra forma. El baudio no se refiere entonces a la cantidad o flujo de
información; la cantidad de información que se puede “empacar” en cada baudio se
representa por el número de bits por baudio, y la velocidad o flujo de la información se
expresa en bits por segundo (bps).
La velocidad de la transmisión digital se mide en bits por segundo (bps). Son
velocidades comunes de los módems: 28.8 Kbps, 33.6 Kbps, y 56 Kbps donde la K
significa mil. Los dispositivos completamente digitales son mucho más rápidos. Cuanto
más rápido, desde luego es mejor. Una velocidad de 2400 bps enviaría un texto de 20
páginas tecleado a un espacio, en 5 minutos. El lado análogo es medido en baudios,
dónde un baudio es un cambio por segundo en la señal. Muchos usan bps y baudios
cómo si fueran la misma cosa. Para velocidades de 2400 bps y menores, eso es verdad,
pero no para las velocidades más elevadas donde por cada cambio de señal se transmite
más de un bit.
Velocidad de transmisión.
Velocidad binaria, tasa o flujo de bits (bit rate en inglés), es la velocidad global de
transmisión expresada en bits por segundo. Se denomina velocidad de transmisión en un
canal de datos, al número de dígitos binarios transmitidos en la unidad de tiempo,
independientemente que los mismos lleven o no información. Está dada por la cantidad de
bits que se transmiten por segundo independientemente de si los mismos contienen
información o no.
La unidad con que el SI (Sistema Internacional) expresa el bit rate es el bit por segundo
(bit/s, b/s, bps). La b debe escribirse siempre en minúscula, para impedir la confusión con
byte por segundo (B/s). Para convertir de bytes/s a bits/s, basta simplemente multiplicar
por 8 y viceversa. Que la unidad utilizada sea el bit/s, no implica que no puedan utilizarse
múltiplos del mismo:
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 18
kbit/s - kbps (kb/s, kilobit/s o mil bits/Segundo).
Mbit/s - Mbps (Mb/s, Megabit/s o un millón de bits/segundo).
Gbit/s - Gbps (Gb/s, Gigabit, mil millones de bits).
Byte/s (B/s u 8 bits por segundo).
Kilobyte/s (kB/s, mil bytes u ocho mil bits por segundo).
Megabyte/s (MBs/s, un millón de bytes u 8 millones de bit por segundo).
Gigabyte/s (GB/s, mil millones de bytes u 8 mil millones de bits).
Velocidades típicas de los accesos de conexión a Internet
Módem Telefónico: 56 kbps = 7 kB/s (7 kilobytes por segundo).
ADSL: 1024 kbps (nominal 1 Mbps) = 128 kB/s (128 kilobytes por segundo).
Cable: 2400 kbps = 300 kB/s (300 kilobytes por segundo).
VSAT: 600 kbps = 75 kB/s (75 kilobytes por segundo).
Telefonía móvil 3G: 384 kbps = 48 kB/s (48 kilobytes por segundo).
Bit rate empleado en transmisión sonora:
8 kbit/s teléfono.
32 Kbit/s Radio AM.
96 Kbit/s Radio FM.
128 kbit/s Sonido calidad CD, muy común en MP3.
192 kbit/s Sonido calidad CD en formato MP3.
320 kbit/s Máxima calidad para formato MP3
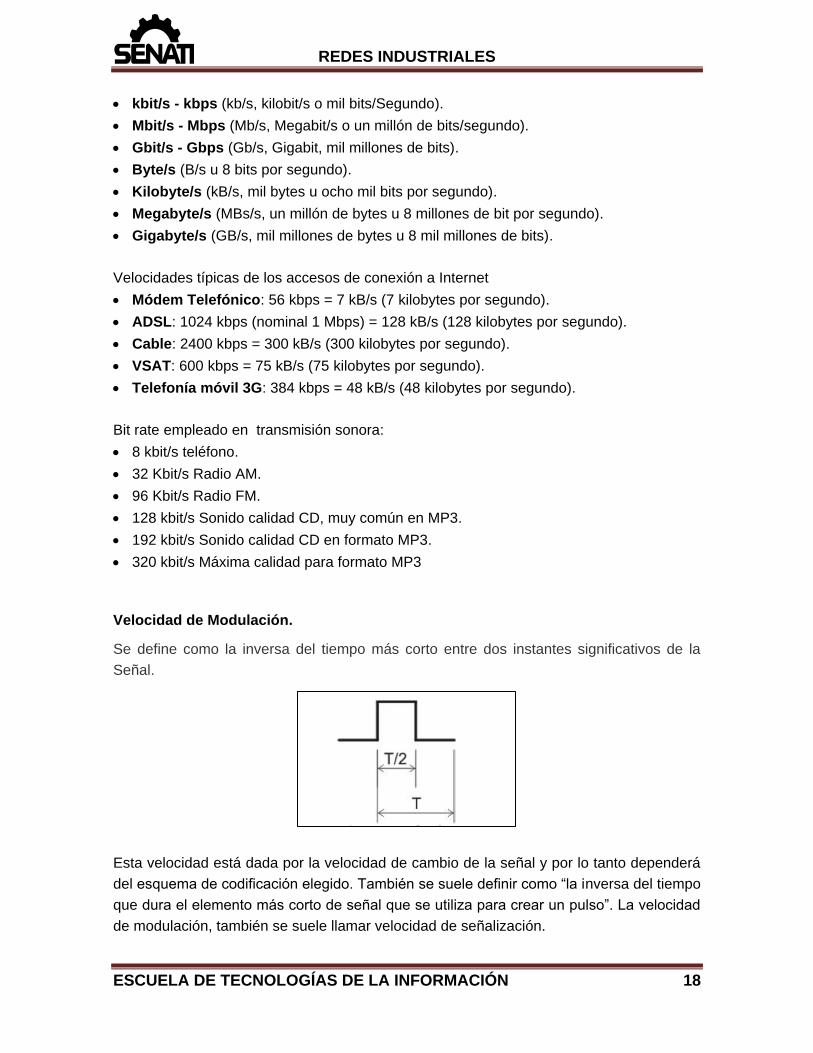
Velocidad de Modulación.
Se define como la inversa del tiempo más corto entre dos instantes significativos de la
Señal.
Esta velocidad está dada por la velocidad de cambio de la señal y por lo tanto dependerá
del esquema de codificación elegido. También se suele definir como “la inversa del tiempo
que dura el elemento más corto de señal que se utiliza para crear un pulso”. La velocidad
de modulación, también se suele llamar velocidad de señalización.
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 19
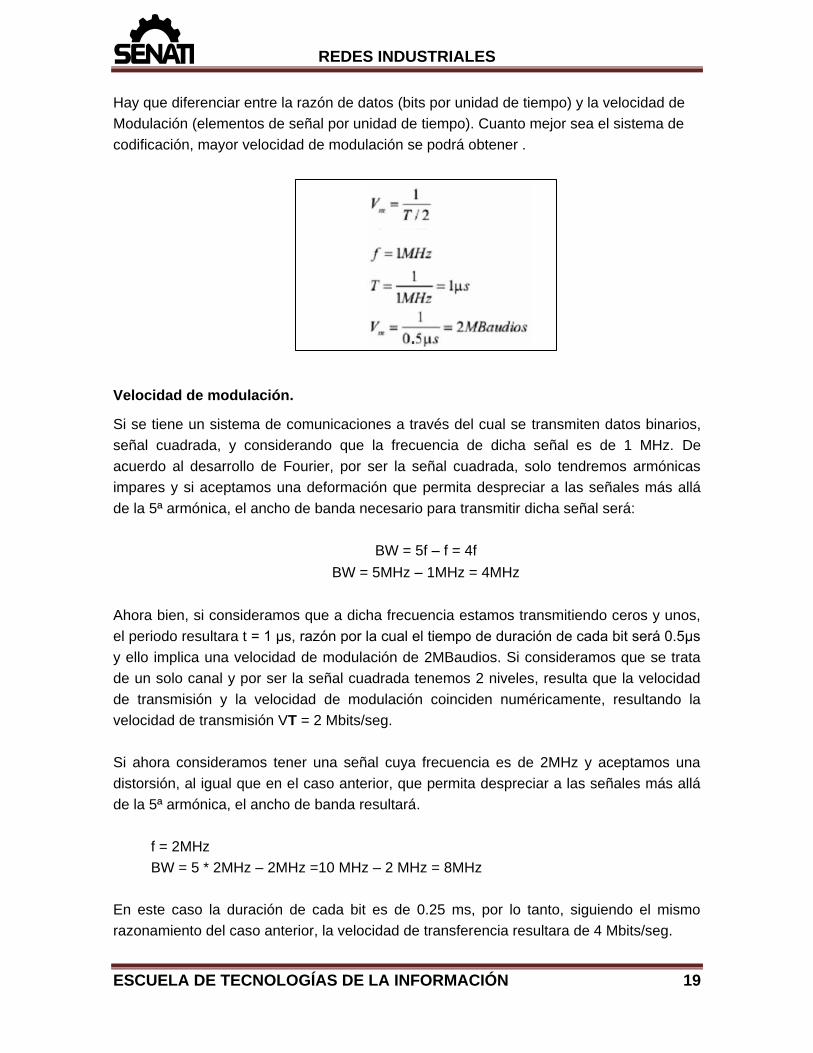
Hay que diferenciar entre la razón de datos (bits por unidad de tiempo) y la velocidad de
Modulación (elementos de señal por unidad de tiempo). Cuanto mejor sea el sistema de
codificación, mayor velocidad de modulación se podrá obtener .
Velocidad de modulación.
Si se tiene un sistema de comunicaciones a través del cual se transmiten datos binarios,
señal cuadrada, y considerando que la frecuencia de dicha señal es de 1 MHz. De
acuerdo al desarrollo de Fourier, por ser la señal cuadrada, solo tendremos armónicas
impares y si aceptamos una deformación que permita despreciar a las señales más allá
de la 5ª armónica, el ancho de banda necesario para transmitir dicha señal será:
BW = 5f – f = 4f
BW = 5MHz – 1MHz = 4MHz
Ahora bien, si consideramos que a dicha frecuencia estamos transmitiendo ceros y unos,
el periodo resultara t = 1 μs, razón por la cual el tiempo de duración de cada bit será 0.5μs
y ello implica una velocidad de modulación de 2MBaudios. Si consideramos que se trata
de un solo canal y por ser la señal cuadrada tenemos 2 niveles, resulta que la velocidad
de transmisión y la velocidad de modulación coinciden numéricamente, resultando la
velocidad de transmisión VT = 2 Mbits/seg.
Si ahora consideramos tener una señal cuya frecuencia es de 2MHz y aceptamos una
distorsión, al igual que en el caso anterior, que permita despreciar a las señales más allá
de la 5ª armónica, el ancho de banda resultará.
f = 2MHz
BW = 5 * 2MHz – 2MHz =10 MHz – 2 MHz = 8MHz
En este caso la duración de cada bit es de 0.25 ms, por lo tanto, siguiendo el mismo
razonamiento del caso anterior, la velocidad de transferencia resultara de 4 Mbits/seg.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 20
Si en un tercer análisis consideramos que la frecuencia de la señal es de 2MHz pero
aceptamos una distorsión en la cual se desprecian las señales cuya frecuencia esté más
allá de la tercera armónica, el ancho de banda resultará:
f = 2MHz
BW = 3 – 2MHz – 2 MHz = 4MHz
y para la frecuencia dada la velocidad de transmisión es, igual que en el caso anterior, de
4 Mbits/seg.
Del análisis anterior podemos obtener las siguientes conclusiones:
Para transmitir una señal sin deformación se requiere un ancho de banda infinito.
Todo medio de transmisión disminuye el ancho de banda, razón por la cual todas las
señales sufren alguna deformación.
Cuanto mayor es el ancho de banda mayor es la velocidad de transmisión que puede
obtenerse.
Cuanto mayor es la frecuencia de la señal, mayor es la velocidad de transmisión
puesto que cada bit tiene un menor tiempo de duración y ello hace que sea posible
enviar mayor cantidad de bits en el mismo tiempo.
Transmisión de datos.
Los distintos tipos de transmisión de un canal de comunicaciones pueden ser de tres
clases diferentes:
Simplex.
Duplex o Half-dúplex (o Semi-dúplex)
Full-Dúplex (o dúplex completo).
SIMPLEX. En este caso el transmisor y el receptor están perfectamente definidos y la
comunicación es unidireccional. Este tipo de comunicaciones se emplean usualmente en
redes de radiodifusión, donde los receptores no necesitan enviar ningún tipo de dato al
transmisor.
Un ejemplo de servicio simplex es el que brindan las agencias de noticias a sus
asociados.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 21
SEMI-DUPLEX. En este caso ambos extremos del sistema de comunicación cumplen
funciones de transmisor y receptor y los datos se desplazan en ambos sentidos pero no
simultáneamente. Este modo también se denomina en “dos sentidos alternos”, aludiendo
al hecho de que las dos estaciones pueden transmitir alternativamente. Esto es
comparable a un puente que tiene un solo carril y con circulación en los dos sentidos.
Este tipo de transmisión se usa a menudo en la interacción entre las terminales y la
computadora central. Mientras que el usuario introduce y transmite datos, la computadora
central no podrá enviar datos a la terminal, ya que si no, éstos aparecerían en la pantalla
de la terminal provocando confusión. Otro ejemplo, la conversación entre dos
radioaficionados que están dialogando, pero donde uno espera que el otro termine de
hablar para continuar el diálogo; nunca pueden ambos hablar simultáneamente.
FULL-DUPLEX. En la transmisión Full-Dúplex las dos estaciones pueden
simultáneamente enviar y recibir datos. Este modo se denomina “dos sentidos
simultáneos” y es comparable a un puente que tuviera dos carriles con tráfico en ambos
sentidos o la conversación telefónica entre dos personas se escucha y hablan
simultáneamente. Para el intercambio de datos entre computadoras, este tipo de
transmisión a más eficiente que la transmisión semi-duplex.
Para la señalización digital, en la que se requiere un medio guiado, la transmisión full-
dúplex normalmente exige dos caminos separados (por ejemplo, dos pares trenzados),
mientras que la transmisión semi-duplex necesita solamente uno. Para la señalización
analógica, dependerá de la frecuencia: si una estación transmite y recibe a la misma
frecuencia, utilizando transmisión inalámbrica se deberá opera en modo semi-duplex,
aunque para medios guiados se puede operar en full-dúplex utilizando dos lineal de
transmisión distintas. Si una estación emite en una frecuencia y recibe a otra, para la
transmisión inalámbrica se deberá operar en full-dúplex. Para medios guiados se deberá
optar por full-dúplex usando una sola línea

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 22
Tipos de transmisión.
TRANSMISION PARALELA. Todos los bits se transmiten simultáneamente, existiendo
luego un tiempo antes de la transmisión del siguiente boque. Este tipo de transmisión
tiene lugar en el interior de una maquina o entre maquinas cuando la distancia es muy
corta. La principal ventaja de esto modo de transmitir datos es la velocidad de transmisión
y la mayor desventaja es el costo.
También puede llegar a considerarse una transmisión en paralelo, aunque se realice
sobre una sola línea, al caso de multiplexación de datos, donde los diferentes datos se
encuentran intercalados durante la transmisión.
Cuando se usa la transmisión en paralelo, se emplean generalmente altas velocidades,
dado que esa es precisamente, una de sus características más importantes: enviar más
bits en menor tiempo posible. En estos casos las velocidades se miden en Bytes o
caracteres por segundo.
En general no se usa este tipo de transmisión, cuando las distancias superan las decenas
de metros debido a que el tiempo de arribo de los bits difiere de una línea a otra, situación
ésta que se agrava con el aumento de la distancia.
TRANSMISION SERIE. En este caso los n bits que componen un mensaje se transmiten
uno detrás de otro por la misma línea a la salida de una maquina los datos en paralelo se
convierten los datos en serie, los mismos se transmiten y luego en el receptor tiene lugar
el proceso inverso, volviéndose a obtener los datos en paralelo. La secuencia de bits
transmitidos es por orden de peso creciente y generalmente el último bit es de paridad.
Un aspecto fundamental de la transmisión serie es la sincronía, entendiéndose como tal al
procedimiento mediante el cual transmisor y receptor reconocen los ceros y unos de los
bits de igual forma.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 23
La sincronía puede tenerse a nivel de bit, de byte o de bloque, donde en cada caso se
Identifica el inicio y finalización de los mismos. La secuencia de los bits transmitidos se
efectúa siempre al revés de cómo se escriben las cifras en el sistema de numeración
binario. Cuando se transmite con bit de paridad, éste se transmite siempre al final de la
cadena de datos. La transmisión en modo serie tiene dos procedimientos diferentes, el
denominado síncrono y el asíncrono.
Técnicas de transmisión.
En este capítulo estudiaremos la transmisión de datos serie; es decir, la transmisión de
datos al través de un único camino, en lugar utilizar un conjunto de líneas en paralelo,
muy usado en los dispositivos de E/S y en los buses internos de los computadores. En la
transmisión serie, los elementos de señalización se envían a través de la línea de
Transmisión de uno en uno.
La transmisión de una cadena de bits desde un dispositivo a otro a través de una línea de
transmisión implica un alto grado de cooperación entre ambos extremos. Uno de los
requisitos esenciales es la sincronización, el receptor debe saber la velocidad a la que se
están recibiendo los datos de tal manera que pueda muestrear la línea a intervalos
constantes de tiempo para así determinar cada uno de los bits recibidos. Para determinar
el valor binario en la recepción de los datos digitales, se realiza un muestreo de la señal
por cada bit recibido.
TRANSMISION ASÍNCRONA. La transmisión asíncrona consiste en evitar el problema de
la temporización mediante el envío ininterrumpido de cadenas de bits que no sean muy
largas en su lugar, los datos se transmiten enviándolos carácter a carácter, normalmente
cada carácter tiene una longitud de 5 a 8 bits1. La temporización o sincronización se debe
mantener durante la duración del carácter, ya que el receptor tiene la oportunidad de
resincronizarse al principio de cada carácter nuevo.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 24
Cuando no se transmite ningún carácter, la línea entre el emisor y el receptor estará en
estado de reposo es equivalente al elemento de señalización correspondiente al 1 binario.
El principio de cada carácter se indica mediante un bit de comienzo que corresponde al
valor binario 0, a continuación se transmite el carácter, comenzando por el bit menos
significativo, que tendrá entre cinco y ocho bits. Normalmente, los bits correspondientes al
carácter van seguidos de un bit de paridad, que ocupará por tanto la posición del bit más
significativo. El bit de paridad se determina en el emisor de tal manera que el número de
unos dentro del carácter, incluyendo el bit de paridad, sea par (paridad par) o impar
(paridad impar), dependiendo del criterio que se elija. Este bit se usa en el receptor para
la detección de errores; por último está el denominado elemento de parada, que
corresponde a un 1 binario. Se debe especificar la longitud mínima del elemento de
parada, y normalmente coincide con 1, 1.5 ó 2 veces la duración de un bit convencional.
No se especifica un valor máximo debido a que el elemento de parada es igual que el
estado de reposo, el transmisor transmitirá la señal de parada hasta que se vaya a
transmitir el siguiente carácter
Si se envía una cadena de caracteres, la separación entre cada dos caracteres será
uniforme e igual a la duración del elemento de parada. Por ejemplo, si el elemento de
parada corresponde a 1 bit y se envía los caracteres ABC, con paridad par y transmisión
de izquierda (primer bit) a derecha (último bit), el patrón de bits será:
01000001010010000101011000011111...111. El bit de comienzo (0) determinará la
secuencia de temporización para los siguientes 9 elementos, que corresponden con un
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 25
código de 7 bits, el bit de paridad y el bit de parada. En el estado de reposo, el receptor
buscará una transición de 1 a 0 que indicará el comienzo del siguiente carácter y
entonces muestreará, siete veces la señal de entrada, una vez por cada intervalo. A
continuación buscará la siguiente transición de 1 a 0, lo que no ocurrirá antes del intervalo
correspondiente a la duración de un bit. Este esquema no es muy exigente en cuanto a
los requisitos de temporización. Por ejemplo, generalmente los caracteres se envían como
unidades de 8 bits, incluyendo el bit de paridad. Si el receptor es un 5 por ciento más
rápido o más lento que el emisor, el octavo muestreo estará desplazado un 45 por ciento,
lo que significa que todavía es aceptable.
La transmisión asíncrona es sencilla y barata, si bien requiere 2 o 3 bits suplementarios
por cada carácter. Por ejemplo, en un código de 8 bits sin bit de paridad y con un
elemento de parada de duración 1 bit, de cada 10 bits, 2 no contendrán información ya
que se dedicarán a la sincronización; por tanto, los bits suplementarios llegan a un 20 por
ciento. Por descontado que el porcentaje de bits suplementarios se podría reducir
mediante la transmisión de bloques con más bits entre el bit de comienzo y el de parada.
No obstante, cuanto mayor sea el bloque de bits, mayor será el error de temporización
acumulativo. Para conseguir un mejor rendimiento se puede usar una estrategia diferente
para la sincronización denominada transmisión síncrona.
TRANSMISION SINCRONA. En la transmisión síncrona, se transmite un bloque de bits
como una cadena estacionaria sin utilizar códigos de comienzo o parada. El bloque puede
tener una longitud de muchos bits.
Para prevenir la desincronización entre el emisor y el receptor, sus relojes se deberán
sincronizar de alguna manera. Una posibilidad puede ser proporcionar la señal de reloj a
través de una línea independiente. Uno de los extremos (el receptor o el transmisor)
enviará regularmente un pulso de corta duración. El otro extremo utilizará esta señal a
modo de reloj esta técnica funciona bien a distancias cortas, sin embargo a distancias
superiores, los pulsos de reloj son susceptibles de las mismas dificultades y defectos que
las propias señales de datos, por lo que pueden aparecer errores de sincronización. La
otra alternativa consiste en incluir la información relativa a la sincronización en la propia
señal de datos.
Para la señalización digital, esto se puede llevar a cabo mediante la codificación
Manchester o Manchester Diferencial. Para señales analógicas se han desarrollado a su
vez diversas técnicas; por ejemplo, se puede utilizar la propia portadora para sincronizar
al receptor usando la fase, en la transmisión síncrona se requiere además un nivel de
sincronización adicional para que el receptor pueda determinar dónde está el comienzo y
el final de cada bloque de datos.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 26
Para llevar a cabo esto, cada bloque comienza con un patrón de bits denominado
preámbulo y generalmente termina con un patrón de bits de final. Además de los
anteriores, se añaden otros bits que se utilizan en los procedimientos de control del
enlace. Los datos, más el preámbulo, más los bits de final junto con la información de
control se denomina trama. El formato en particular de la trama dependerá del
procedimiento de control del enlace que se utilice.
En la figura se muestra, en términos generales, un formato típico para una trama de una
transmisión síncrona. Normalmente, la trama comienza con un preámbulo denominado
delimitador de 8 bits. El mismo delimitador se utiliza igualmente como indicador del final
de la trama. El receptor buscará la aparición del delimitador que determina el comienzo de
la trama. Este delimitador estará seguido por algunos campos de control, el campo de
datos (de longitud variable para la mayoría de los protocolos), más campos de control y
por último, se repetirá el delimitador indicando el final de la trama. Para los bloques de
datos que sean de suficiente tamaño, la transmisión síncrona es mucho más eficiente que
la asíncrona. La transmisión asíncrona requiere un 20 por ciento o más de bits
suplementarios. La información de control, el preámbulo y el final son normalmente menos
de 100 bits.
Puerto serie.
El puerto serie tiene como ventaja la facilidad del cableado en la comunicación, tan sólo
son necesarios dos hilos para establecer la comunicación: uno de transmisión y otro de
masa. En caso de comunicación en los dos sentidos necesitaríamos otro cable más de
recepción.
El puerto serie se utilizó inicialmente para conectar el PC a un módem. En esta conexión,
al PC se le denomina DTE/ETD (Data Terminal Equipement o Equipo Terminal de Datos)
y al módem se le denomina DCE/ETCD (Data Comunication Equipement o equipo de
terminación de circuito de datos). Otra ventaja de la comunicación serie es que desde los
años sesenta no ha cambiado prácticamente nada la configuración y los protocolos de
comunicación del puerto serie, por lo que todas las conexiones a través del puerto serie
cumplen con la norma RS-232 (Recommended Standard) de ElA (Electronic Industries
Association). Renombrada como EIA-232 en el año 1991, aunque sigue utilizándose

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 27
mayoritariamente la denominación primera, ya que está muy arraigada. En el ámbito
internacional es definida por CCITT ahora denominada UIT-T, como la recomendación
V.24. Todas estas normas son las recomendaciones funcionales.
La comunicación serie es asíncrona, y los datos enviados son los encargados de
sincronizar al receptor con respecto al emisor. La Figura muestra el esquema del pro-
tocolo de comunicación que comentamos a continuación.
A cada byte de información a transmitir se le añaden una serie de bits fijos de
señalización para marcar el comienzo (bit de inicio o START) y el final de cada byte (bits
de parada o STOP). El transmisor y el receptor utilizan bases de tiempos diferentes que
se mantienen sincronizadas mediante el bit de arranque de cada byte.
Los aspectos más importantes de la norma V24, que define las características
funcionales, se complementan con la norma V.28 de las características eléctricas y la
ISO 2110 de las mecánicas, estando casi siempre asociadas en la definición del interface
de que se trate. Veamos a continuación cada uno de ellos:
Mecánicos. La interconexión se efectúa mediante dos conectores de 25 patillas, tipo
DB25, siendo macho el que incorpora el DTE/ETD (PC) y hembra el del DCE/ETCD
(módem), aunque algunas veces este criterio se puede contravenir (en la figura 4.5 se
muestra uno). De los 25 polos en la práctica sólo se utilizarían 9, por lo que se redujo al
conector DB9. Mediante un cable, plano o redondo, se conecta cada una de las patillas,
constituyendo cada conexión un circuito de enlace, identificado por un número
determinado.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 28
Eléctricos. Las características eléctricas se describen con todo detalle en las
recomendaciones V.10, V. 11 y V28, cada una específica para un tipo de aplicación.
V.10 Circuitos de enlace asimétricos para uso con equipos que emplean tecnología de
circuitos integrados y funcionan a velocidades entre 20 y 100 kbit/s.
V.11 Circuitos de enlaces asimétricos para uso con equipos que emplean tecnología de
circuitos integrados y funcionan a velocidades hasta 10 Mbit/s.
V.28 Circuitos de enlaces asimétricos para uso con equipos que emplean tecnología de
circuitos discretos y funcionan a velocidades inferiores a 20 kbit/s.
La V.28 es la adoptada por la mayoría de los módem, que define una velocidad de
transmisión de hasta 20 Kbit/s y una longitud máxima de 15 metros (50 pies). Las
señales eléctricas se definen entre +3 y + 15 voltios para el estado activo y entre -3 y -15
voltios para el estado no activo. Los fabricantes utilizan tensiones de + 5 y -5 voltios o bien
+ 12 y -12 voltios.
Funcionales. Los circuitos necesarios para establecer el diálogo entre los equipos son los
siguientes sus funciones y asignación de patillas. RS-232-C Standard (DB25)

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 29
Normalmente, en un enlace no se emplean todos los circuitos, sino que se hace uso de un
número limitado de ellos, que varía en función de que sea una transmisión asíncrona o
síncrona y de que los equipos conectados posean mayor o menor grado de inteligencia
para efectuar el control de la transmisión mediante el propio protocolo lógico, sin necesi-
dad de control físico.
A continuación se definen los circuitos de enlace y sus funciones:
Circuito 102 - Tierra de señalización o retorno común: Este conductor establece el
retorno común para los circuitos de enlace asimétricos que siguen la Recomendación
V.28 y el potencial de referencia en corriente continua para los circuitos de enlace
definidos en las Recomendaciones V. 10, V. 11 y V35.
Circuito 102a - Retorno común del ETD: Este conductor se conecta al retorno común
del circuito del ETD usándose como potencial de referencia para los receptores de
circuitos asimétricos, del tipo VIO, del ETCD.
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 30
Circuito 102b - Retorno común del ETCD: Este conductor se conecta al retorno
común del circuito del ETCD usándose como potencial de referencia para los
receptores de circuitos asimétricos, tipo V.I0, del ETD.
Circuito 102c - Retorno común: Este conductor establece el retorno común de la
señal para circuitos de enlace de corriente simple, cuyas características eléctricas son
conforme a la Recomendación V.31.
Circuito 103 - Transmisión de datos: Este es el circuito utilizado para transferir las
señales generadas en el ETD hacia el ETCD.
Circuito 104 - Recepción de datos: Este es el circuito utilizado para transferir las
señales procedentes del ETCD hacía el ETD.
Circuito 105 - Solicitud de transmitir: Señales que controlan la función de
transmisión por el canal de datos del ETCD. Si se encuentra activo el ETCD entrará en
modo de transmisión hasta que dicha señal pase a estado de desactivada.
Circuito 106 - Preparado para transmitir: Las señales transmitidas por este circuito
indican al ETD que el ETCD está preparado para aceptar señales de datos para su
transmisión por el canal de datos o con fines de prueba y mantenimiento.
Circuito 107 - Equipo de datos preparado: Estas señales indican si el ETCD está
dispuesto para funcionar; si se encuentra activada indica que el convertidor de señal o
equipo similar está conectado a la línea y el ETCD preparado para intercambiar
señales de control con el ETD para iniciar la transferencia de datos.
Circuito 108.1 - Conexión del ETD a la línea: Las señales transmitidas por este
circuito controlan la conexión o desconexión a la línea del conversor de señales.
Circuito 108.2 - Terminal de datos preparado: Si esta señal se activa el ETCD se
preparará para conectar a la línea el conversor de señal, y mantiene esta conexión
después de que se ha establecido por medios suplementarios. El estado desactivado
tiene por efecto que el ETCD desconecte de la línea el equipo de conversión de
señales, una vez completada la transmisión a la línea de todos los datos entregados.
Circuito 109 - Detector de señales de línea recibidas por el canal de datos: Las
señales transmitidas por este circuito indican si las señales de línea recibidas por el
canal de datos están o no dentro de los límites especificados. Si se encuentra activada
indicará que la señal recibida es apropiada; en caso contrario que se encuentra fuera
de los límites definidos.
Circuito 110 - Detector de calidad de la señal de datos: Señales que indican si
existe o no cierta probabilidad de error en los datos recibidos. La calidad de la señal se
ajusta a la Recomendación pertinente sobre el ETCD.
Circuito 111 - Selector de velocidad binaria (procede del ETD): Las señales
transmitidas por este circuito se utilizan para seleccionar una de las dos velocidades
binarias (de señalización) de un ETCD dual, ya sea síncrono o asíncrono. Si está
activada se selecciona la velocidad más alta, y la más baja si está desactivada.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 31
Circuito 112 - Selector de velocidad binaria (procede del ETCD): Las señales
transmitidas por este circuito se utilizan para la selección de la velocidad binaria en el
ETD, en función de la utilizada por un ETCD síncrono o asíncrono. Si está activada se
selecciona la velocidad más alta; y la más baja si está desactivada.
Circuito 113 - Temporización para los elementos de señal en la transmisión
(procede del ETD): Señales que proporcionan al ETCD la temporización para los
elementos de señal. La condición de activado/desactivado debe de mantenerse por
periodos de tiempo iguales.
Circuito 114 - Temporización para los elementos de señal en la transmisión
(procede del ETCD): Señales que proporcionan al ETD la temporización para los ele-
mentos de señal. La condición de activado/desactivado debe de mantenerse por
periodos de tiempo iguales.
Circuito 115 - Temporización para los elementos de señal en la recepción
(procede del ETCD): Señales que proporcionan al ETD la temporización para los ele-
mentos de señal. La condición de activado/desactivado debe mantenerse por periodos
de tiempo iguales, y la transición de activado a desactivado indicará la posición del
centro de cada una de las señales del circuito 104.
Circuito 118 - Transmisión de datos por el canal de retorno: En las transmisiones
realizadas por el canal de retorno este circuito es equivalente al 103.
Circuito 119 - Recepción de datos por el canal de retorno: En las transmisiones
realizadas por el canal de retorno este circuito es equivalente al 104.
Circuito 120 - Petición de transmisión por el canal de retorno: Señales que
controlan la función de transmisión por el canal de datos (de retorno) del ETCD. Es
equivalente al circuito 105. Si se encuentra activo el ETC13 entrará en modo de
transmisión hasta que dicha señal pase a estado de desactivada.
Circuito 121 - Canal de retorno preparado: Las señales transmitidas por este circuito
indican al ETD que el ETCD está preparado para aceptar señales de datos para su
transmisión por el canal de datos (de retorno) o con fines de prueba y mantenimiento.
Es equivalente al circuito 106. Si se encuentra activo el ETCD puede transmitir datos
por el canal de retorno; si está desactivada no puede hacerlo.
Circuito 122 - Detector de señal de línea recibida por el canal de retorno: Este
circuito es equivalente al 109, pero con la diferencia de que se utiliza para indicar si la
señal de línea recibida por el canal de retorno se encuentra dentro de los límites
especificados.
Circuito 125 - Indicador de llamada. Señales que indican si el ETCD: Está
recibiendo algún tipo de señal de llamada.
Tipos de cables y enlaces.
Existen infinidad de tipos de cables serie, en función del tipo de conexión y del protocolo
que se haya implementado, por tanto necesitaremos recurrir normalmente a la documen-
tación del fabricante para construir el cable que nos permita conectarnos con un

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 32
periférico. Hay que poner especial cuidado en el tipo de conector, pues las patillas de la
norma no se corresponden entre un conector DB9 y un conector DB25.
El cable de conexión original se utilizó para conectar un ordenador (DTE) con un módem
externo (DCE).
Cuando se desea conectar dos DTE entre sí (por ejemplo, para conectar dos
ordenadores, o para conectar un ordenador con un autómata) se utiliza un cable
denominado null módem, el nombre lo recibe porque de lo que se trata es de anular el
módem (DCE) pues conectaremos los dos DTE directamente mediante un cable NULL
MÓDEM (1).
Como se observa en el NULL MÓDEM (1), las líneas DTR y RTS están realimentadas a
las líneas DSR/CD por un lado y CTS por otro. Esto hace que cuando el DTE activa DTR
y RTS recibe respuesta inmediata de preparado (DSR y CTS) por parte de un DCE que
realmente no existe. Este cable no permite conocer si en el otro extremo hay o no un
dispositivo conectado.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 33
En el cable NULL MÓDEM (2), las líneas DTR/DSR y RTS/CTS están cruzadas entre
ambos DTE, esto permite que cada DTE sepa si el otro extremo está ya conectado,
además permite implementar un control de flujo hardware. Cuando cualquiera de los dos
DTE activa las líneas RTS/DTR, está informando al extremo opuesto que ya está
preparado para transmitir o recibir datos.
Como se observa en el cable para impresora en serie, sólo se utiliza la transmisión en
un sentido; se utiliza control de flujo hardware mediante las líneas DTR/DSR.
El siguiente cable se utiliza para conectar un PC por el puerto serie, a un puerto serie RS-
232C de los autómatas programables de la marca Ornron. Se representa el conector de
Omron.
Se pueden realizar conexiones uno-a-uno mediante el puerto RS-232C para conectar dos
autómatas mediante la siguiente configuración.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 34
El siguiente cable se utiliza para conectar un PC por el puerto serie, a una unidad de
enlace LK201 de los autómatas programables de la marca Omron.
Para realizar programas de comunicaciones con un solo ordenador podemos utilizar el
cable loopback como el siguiente:
Este cable LOOPBACK realmente es un conector que permite que un DTE transmita
datos y los reciba por el mismo puerto. Si conectamos un LED en serie en el cable que va
de la señal TX a RX podremos monitorizar los bits que transmitimos/recibimos. Existen
además en el mercado unos dispositivos denominados monitores de puerto serie que
disponen de un LED por cada línea del puerto y que permiten monitorizar tanto las líneas
de control como las líneas de datos.
Otras posibles conexiones de null módem son las siguientes:

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 35
Los tipos de enlaces posibles, a través de un puerto serie podemos hacer una
comunicación punto a punto: simplex, half-duplex y full-duplex.
Norma rs-485.
La norma RS-485 se encuentra normalizada en la norma ISO 8482.1993. Esta norma
presenta varias ventajas sobre la norma RS-232.
Bajo coste. La conexión se realiza mediante dos hilos, además la diferencia de tensión
necesaria es de tan sólo 1,5 voltios en contraste con los 5 voltios que requiere la norma
RS-232, haciendo que los circuitos puedan ser alimentados con 5 voltios.
Enlaces largos: Una conexión RS-485 puede tener una extensión de 1.200 metros.
Posibilidad de red. La norma RS-232 permite conectar únicamente dos dispositivos
para establecer una comunicación punto a punto, mientras que la norma RS-485
permite conexiones multipunto de hasta 32 nodos con posibilidad de aumentar a 256
nodos sobre un cable con dos hilos.
Velocidad. Se pueden alcanzar velocidades de hasta 10 Mb/s.
CARACTERÍSTICAS.
La norma RS-232 sólo permite enlaces punto a punto entre dos nodos, las
comunicaciones que se pueden establecer son del tipo simplex, half-duplex o full-duplex.
La norma RS-485 permite enlaces multipunto o multinodo (más de 2 nodos) mediante la
conexión de un bus de dos hilos entre todos los nodos para formar una red con topología

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 36
física en bus. Todos los nodos pueden escuchar el medio, pero sólo uno de ellos puede
transmitir en un mismo instante, se trata por tanto de comunicaciones half-duplex.
La señal que se transmite está balanceada, al contrario que en la norma RS-232 donde
no lo está. Esto quiere decir que se utiliza la diferencia de potencial entre los dos hilos
para establecer el nivel lógico que hay en la línea; no se trata por tanto de una señal
referida a masa.
Las señales balanceadas son mucho más inmunes al ruido eléctrico, debido a que las
interferencias se acoplan por igual a los dos hilos y, por tanto, su diferencia es cero. Esta
inmunidad al ruido eléctrico las hace ideales para entornos industriales. Si utilizamos un
cable en par trenzado mejoraremos aún más la inmunidad al ruido.
El módulo de la tensión diferencial VA -VB debe de encontrarse entre 1,5 y 6 voltios; la
sensibilidad es de 0,2 voltios. Se considera “1” lógico cuando la tensión VA es 0,2 voltios
mayor que la tensión VB, se considera “0” lógico cuando la tensión VB es 0,2 voltios mayor
que VA. La figura siguiente muestra la señal típica RS-485; se ha dibujado la señal en la
línea asumiendo una tensión base de 3 voltios. Obsérvese que la tensión VAB tiene un
valor de pico a pico de 6 voltios.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 37
La norma establece que el número de nodos será de 32, pero con receptores de alta
impedancia se pueden alcanzar los 256 nodos. Los adaptadores RS-485 utilizan
típicamente una fuente de alimentación de 5 voltios.
Cada nodo del enlace dispone de un adaptador. La línea de control TX/RX ENABLE
controla el modo de funcionamiento del nodo; cuando la línea tiene un cero el nodo puede
escuchar el tráfico en la línea; cuando la línea de control se pone a uno el nodo puede
transmitir.
Tipos de enlaces.
Los enlaces RS-485 se pueden utilizar en comunicaciones punto a punto cuando se
desea alcanzar mayor velocidad o abarcar una distancia mayor que la soportada por la
norma RS-232. Se pueden establecer enlaces simplex o half-duplex mediante dos hilos.
Si se desea establecer una conexión punto a punto de tipo full-duplex es necesario utilizar
adaptadores de RS-485 con doble circuito de salida. En este enlace, un canal se utiliza en
un sentido y el otro en sentido contrario.
Si se utiliza una conexión RS485 para un enlace punto a punto no se podrán utilizar las
líneas de control de flujo de la norma RS-232, ya que estas líneas no están disponibles en

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 38
el enlace, sin embargo, sí es posible utilizar un control de flujo software por XON/XOFF
para controlar el flujo entre los dos nodos enlazados.
Si deseamos realizar un enlace multinodo tendremos que recurrir a alguna de las técnicas
de medio compartido (paso de testigo, contienda, sondeo, etc.), ya que no es posible la
transmisión simultánea por parte de dos o más nodos.
Cuando se utilizan adaptadores de doble circuito es posible sustituir un enlace RS-232 por
otro RS-485 sin modificar el protocolo de comunicaciones. Ésta es otra de las ventajas de
esta norma: es transparente para el programador. Para que el software desarrollado para
RS-232 funcione en un enlace RS485 sólo es necesario instalar un adaptador RS-232 a
RS-485 en cada nodo y los cables adecuados.
También es posible utilizar los adaptadores de doble circuito para formar un enlace
multinodo full-duplex. En esta configuración, un nodo transmite al resto de los nodos a
través de un canal y recibe de todos ellos a través de otro canal distinto.
En esta configuración se puede utilizar control de acceso al medio mediante
maestro-esclavo: uno de los nodos (por ejemplo el nodo 0) se encarga de gestionar qué
nodo tiene permiso para transmitir mediante el envío del mensaje correspondiente a
través del canal 1, de este modo, todos los nodos esclavos pueden escuchar las órdenes
que les envía el nodo maestro. Cuando un nodo tiene permiso para transmitir puede
utilizar el canal 2 para enviar el mensaje al nodo maestro que lo retransmitirá al nodo
destino. Todo el tráfico de red pasa, por tanto, por el nodo maestro al igual que en una
topología en estrella.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 39
La corriente que se utiliza en el enlace depende del tipo de cable y resistencias termínales
que se dispongan, normalmente en los dos extremos de un enlace RS-485 multinodo se
dispone de dos resistencias de 120Ω conectadas entre los cables A y B que son vistas
como una única resistencia de 60Ω de forma similar a las resistencias terminales. El valor
de esta resistencia debe coincidir con la impedancia característica Z0 del cable utilizado
para evitar reflexiones en los extremos de la línea. En algunos enlaces de poca longitud y
velocidad, es posible eliminar esta resistencia sin que el enlace se vea afectado.
Conversores RS-232 a RS-485.
Existen en el mercado gran variedad de conversores RS-232 a RS-485. La mayoría de
ellos son externos y se pueden conectar directamente al puerto serie del ordenador.
Estos conversores en el extremo que se conecta al PC tienen un conector DB-9 o DB-25 y
en el otro extremo pueden disponer de una gran variedad de terminales: conectores RJ11,
RJ45, DB-9, DB25, etc.
Se utilizan tres líneas del DTE, la línea de salida de datos TX, la línea de entrada de
datos RX y la línea de control RTS para habilitar o no la transmisión. Cuando RTS está
a “0” el DTE puede transmitir, cuando está a “1” el DTE puede recibir.
Por ejemplo el cable de asignación PC / PPI (PC norma RS-232 y PPI norma RS-485) con
conector DB-9:

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 40
NORMA RS-422.
La norma RS-449 representa un considerable avance al permitir distancias y velocidades
mucho mayores: 1.200 metros y hasta 10 Mbit/s en el caso de señales balanceadas
(RS-422) o 40 kbit/s en el caso contrario (RS-423). Emplea un conector de 37 patillas para
el canal principal y uno de 9 para el secundario. Presenta una gran inmunidad frente al
ruido.
La norma RS-449 define la conexión mecánica y funcionalmente, mientras que las
características eléctricas de la misma están contenidas en las normas RS-422, para
circuitos equilibrados, y la RS-423, par circuitos no equilibrados.
Otra diferencia respecto a la RS-232 es que al estar el margen de tensiones situado en la
banda comprendida entre ±0,2 y ±6 voltios.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 41

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 42
El PLC de Omron utiliza la siguiente configuración para comunicar dos autómatas con una
tarjeta LK-202 con el conector RS-422 de 9 pines:
Norma RS-422 frente a RS-485.
La norma RS-422 fue diseñada para permitir mayores distancias y velocidades de
transmisión que la norma RS-232, sus características son similares a las de la RS-485:
ambas utilizan tensiones balanceadas y permiten alcanzar similares distancias y
velocidad. La principal diferencia entre ambas es que la norma RS422 fue diseñada para
comunicaciones punto a punto mientras que la norma RS-495 permite realizar
comunicaciones multínodo.
La norma RS-485 permite utilizar el método de acceso por contienda: cuando dos nodos
transmiten a la vez y se distorsiona la información en el bus es posible recuperar el error.
La norma RS-422 no permite este método de acceso ya que la transmisión simultánea de
dos o más nodos podría provocar errores hardware en los adaptadores. Por este motivo,
si se utiliza la RS-422 se suele implementar normalmente mediante cuatro hilos. La

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 43
norma RS-485 en cambio sólo requiere de dos hilos para formar una red semiduplex,
aunque puede utilizarse con 4 hilos en duplex.
Puerto Paralelo.
La característica más relevante del puerto paralelo es que es capaz de transmitir 8 bits de
datos simultáneamente a través de 8 líneas en paralelo. La distancia máxima del cable es
de 2 a 4 metros lo que reduce mucho su ámbito de aplicación, a cambio, la velocidad de
transferencia puede ser mucho mayor que la de un puerto serie. El inconveniente es que
resulta más caro. Las señales eléctricas que se utilizan son el lógica positiva: 0 voltios
para “0” y 5 voltios para “1” lógico.
El puerto paralelo en los PC se presenta siempre como un conector DB-25 hembra. La
norma IEEE 1284 define 3 tipos de conectores:
Tipo A: se corresponde con el clásico conector DB25 macho (PC), 25 pines.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 44
Tipo B: se corresponde con al conector CENTRONICAS que se suele conectar a la
impresora, posee 36 pines.
Tipo C: conector nuevo que se utiliza en algunos dispositivos de 36 pines
En este conector:
8 líneas (pines) son para salida de datos (bits de DATOS). Sus valores son
únicamente modificables a través de software, y van del pin 2 (dato 0, D0) al pin 9
(dato 7, D7).
5 líneas son de entrada de datos (bits de ESTADO), únicamente modificables a través
del hardware externo. Estos pines son: 11, 10, 12, 13 y 15, del más al menos
significativo.
4 líneas son de control (bits de CONTROL), numerados del más significativo al menos:
17, 16, 14 y 1. Habitualmente son salidas, aunque se pueden utilizar también como
entradas y, por tanto, se pueden modificar tanto por software como por hardware.
Las líneas de la 18 a la 25 son la tierra.
En la siguiente tabla se detallan la nomenclatura y descripción de cada línea. La columna
"Centronics pin" se refiere a las líneas del conector tipo Centronics usado en las
impresoras. La columna E/S se refiere al dato visto desde el lado del PC.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 45
Conectar dos ordenadores mediante el Puerto Serie.
Se puede conectar dos ordenadores por puerto Serie en entorno Windows para
comprobar un cable Null Modem, sin utilizar software ajeno al Sistema Operativo, esto es
de gran utilidad para pasar ficheros de un PC a otro cuando algunos de los S.O. no
soporta DCC (Conexión Directa por Cable), por ejemplo Windows NT 4.0, o no se dispone
de tarjeta de red.
Para ello deberemos disponer de un cable serie Null Modem (Modem Nulo), que
preparamos en la actividad anterior, según sea el DB9 o DB25. Luego deberemos tener
iniciar el programa Hyperterminal que viene instalado en Windows XP (en Windows 7
podemos descargar la aplicación Hyperterminal del internet), para iniciar el programa con
pulsamos Inicio/ Accesorios /Comunicaciones/ Hyperterminal (En ambos equipos
iniciamos el Hyperterminal)
La conexión es visible en ambos equipos, el intercambio de información se realiza de
forma bidireccional, es decir, el host manda información al invitado y viceversa. Si
decidimos cambiar la tipografía de nuestra conexión
(Archivo>Propiedades>Configuración>Configuración ASCII) tenemos que cerciorarnos
que dicha topografía sea compatible 100% con el idioma utilizado, es decir, en nuestro
caso tenemos que utilizar una topología que contenga acentos, etc. En este tipo
de conexión no hace falta definir qué equipo es el host y que equipo es el invitado ya
que nuestro software lo define automáticamente, identifica como host el primer equipo
que se conecte. Para realizar la conexión seguiremos el siguiente procedimiento:
Una vez abierto seleccionamos un nombre de conexión y aceptamos.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 46
Ahora deberemos elegir un Puerto Serie que tengamos libre, normalmente COM 1 (si
empleamos adaptador USB-RS232 elegimos COM3).
Configuramos el puerto Serie en la ventana de propiedades.
Después de realizar la configuración, se abrirá una nueva conexión abriéndose el
Hyperterminal.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 47
Desde el equipo que vamos a enviar pulsamos en la pestaña Transferir y
seleccionamos Enviar y elegimos el fichero a transferir y configurar en ambos el mismo
de protocolo de transmisión, se recomienda Zmodem.
En el equipo que va recibir pulsamos en Transferir, seleccionamos Recibir y elegimos
el directorio en el cual va a ser recibido
Ventajas del Hyperterminal:
Se puede conversar fluidamente entre ambos equipos.
Se puede visualizar el envío de archivos.
Conexión mucho más sencilla, con sólo un botón.
Dispone de una interfaz amigable.
Desventajas del Hyperterminal:
La comunicación resultar un poco más compleja.
Configurado a distintas velocidades no responde adecuadamente. Para la realización
de estas pruebas, utilizamos una velocidad de 115.200 Bps, que no era el máximo
marcado en las configuraciones, pero si el máximo con el que la conexión era
realizable.
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 48
TAREA 2: DETERMINA LOS PRINCIPALES PROTOCOLOS DE
COMUNICACIÓN INDUSTRIAL.
Cuando un proceso se realiza sin la intervención humana decimos que se trata de un
proceso automatizado la automatización permite la eliminación “total” o parcial de la
intervención del hombre. Los automatismos son dispositivos de realizar tareas sin la
intervención humana. Algunas máquinas coma las lavadoras tienen programadores y las
ordenes que proporcionan se llaman programas tipos de automatización.
En la actualidad existen diversas maneras de automatizar un proceso o realizar un trabajo
y estas soluciones varían dependiendo del entorno, recursos, capacidades técnicas,
personal, entre otros aspectos importantes. Por otro lado las alternativas también son muy
variadas y van desde el uso de fuentes de energía tales como la hidráulica, eléctrica y la
neumática, se mencionaran algunos de los motivos por los cuales la neumática es
beneficiosa.
Equipos y Materiales:
Computador Pentium 4 o superior.
Sistema operativo Windows XP o superior.
Transmisor de Presión, Temperatura.
Modem HART.
Programa de Automatización Industrial Pactware.
Un Instrumento HART Comunicator.
Orden de Ejecución:
Instalación del programa de Instrumentación Industrial en la computadora.
Implementación de las tareas y comprobación del correcto funcionamiento de las
tareas.
Instala un transmisor en un Proceso Industrial.
En esta actividad vamos a realizar la instalación y configuración de un transmisor en un
proceso industrial, para nuestras actividades escogimos un transmisor para medir
presión y otro de temperatura, ambos son instrumentos inteligentes con la capacidad de
comunicación, el protocolo de comunicación manejado por estos instrumentos es HART,
para configurarlos y leer los datos que transmiten emplearemos un Modem HART y un
HART Comunicator que además tienen la capacidad de comunicarse a un computador
(Workstation) mediante un programa denominado Pactware.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 49
MODEM HART. Es un dispositivo que puede leer los datos enviados por un instrumento
inteligente en el protocolo de comunicación HART y mediante su interfaz RS232 recibir
los datos de la variable de proceso mediante el PACTWARE.
PROCEDIMIENTO:
Instalaremos el programa de instrumentación Industrial Pactware 4.0 en la computadora,
este programa permitirá comunicarnos con el Modem HART. El programa podemos
descargarlo desde el siguiente enlace:
http://www.microflx.com/HART_Software_Links.htm
4. Abrir la carpeta que contiene el instalador del programa Pactware, haremos clic en la
aplicación Setup, se abrirá una ventana en la que seleccionaremos el idioma
5. Seleccionaremos el tipo de instalación, con esta configuración se descargaran los
archivos del programa Pactware.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 50
6. En la ventana siguiente se especifica la ruta de descarga para los drivers genéricos
ICS Generic HART, específicamente los drivers FDT 1.2 DTM.
7. Un DTM es una librería que cada fabricante de instrumentos proporcionará para sus
equipos, si no se instala esta librería en la computadora el modem HART no podrá
establecer comunicación con el Pactware.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 51
8. Finalizamos la instalación del programa, en los pasos siguientes procedemos a realizar
la instalación del modem HART.
9. Preparar el modem HART para su instalación, en nuestro caso emplearemos un
modem que tiene un conector RS232.
10. Conectar el modem en un puerto COM de la computadora, si la PC tiene puerto COM
integrado a la placa madre, es probable que presente algunos problemas con la
lectura de datos, es recomendable instalar una tarjeta externa.
11. Inicializamos el programa Pactware.
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 52
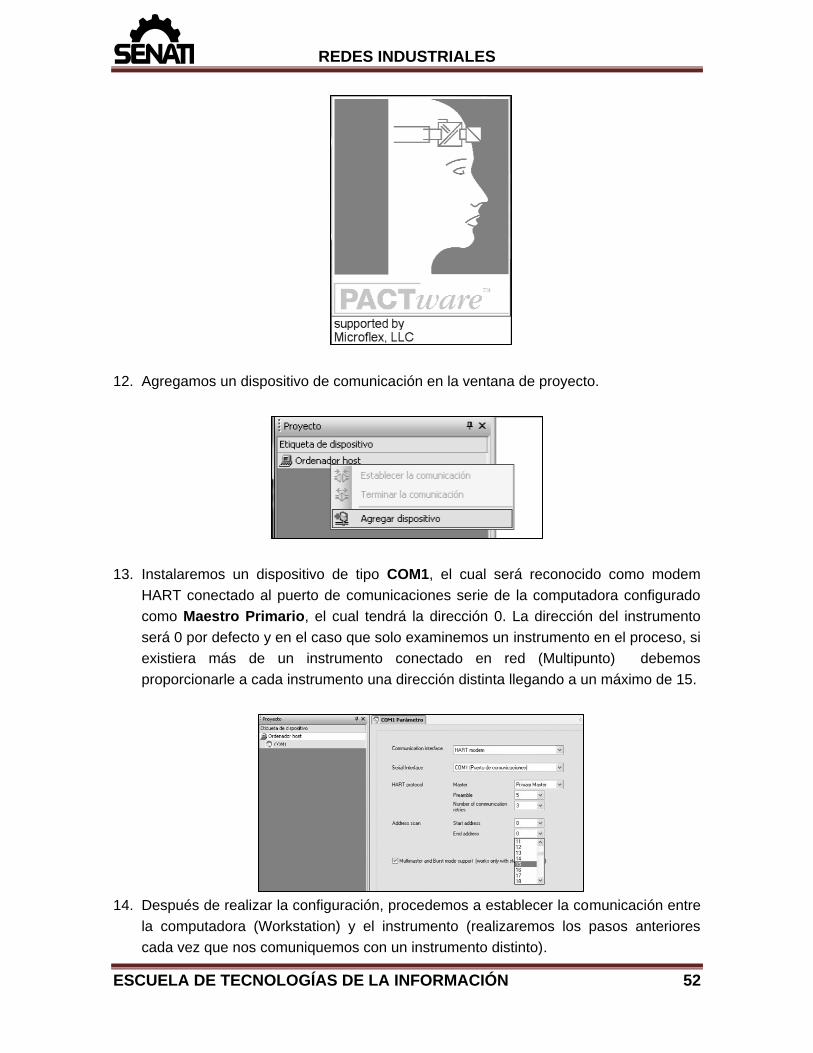
12. Agregamos un dispositivo de comunicación en la ventana de proyecto.
13. Instalaremos un dispositivo de tipo COM1, el cual será reconocido como modem
HART conectado al puerto de comunicaciones serie de la computadora configurado
como Maestro Primario, el cual tendrá la dirección 0. La dirección del instrumento
será 0 por defecto y en el caso que solo examinemos un instrumento en el proceso, si
existiera más de un instrumento conectado en red (Multipunto) debemos
proporcionarle a cada instrumento una dirección distinta llegando a un máximo de 15.
14. Después de realizar la configuración, procedemos a establecer la comunicación entre
la computadora (Workstation) y el instrumento (realizaremos los pasos anteriores
cada vez que nos comuniquemos con un instrumento distinto).

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 53
15. Estableceremos la comunicación con el instrumento, se nos mostrara una ventana de
progreso de comunicación.
16. Observaremos en la barra de estado del programa que cuando exista problemas de
comunicación el icono de comunicación se mostrara en color rojo, si la comunicación
es correcta se mostrara como en la figura siguiente.
Configura un transmisor en un proceso industrial.
En esta actividad vamos a realizar la instalación y configuración de un transmisor en un
proceso industrial, para nuestra actividad empleamos un transmisor para medir presión
y otro de temperatura, ambos son instrumentos inteligentes con la capacidad de
comunicación, el protocolo de comunicación manejado por estos instrumentos es HART,
para configurarlos y leer los datos que transmiten emplearemos un Modem HART y un
HART Comunicator que además tienen la capacidad de comunicarse a un computador
(Workstation) mediante un programa denominado Pactware.
TRANSMISOR. Los transmisores digitales digitalizan la señal análoga medida y utilizan
un microprocesador. La señal analógica al ingresar al transmisor es digitalizada con un
ADC. Debido al tiempo necesario para cuantificar una señal, los instrumentos digitales no
realizan una medición continua, sólo se toman muestras (samples) de la señal. Existen
transmisores inteligentes que al poseer un microprocesador realiza funciones que no
hacen los analógicos: linealiza, compensa en función de otra variable medida, uno de

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 54
ellos es el transmisor SMART en el que su salida es analógica de 4 a 20 mA, y se puede
comunicar con un "hand-held"(HART comunicator) usando modulación en la salida.
CARACTERÍSTICAS.
Son flexibles en sus funciones: disponen de más funciones, por la facilidad de la
manipulación de números por un microprocesador. Las funciones pueden ser
modificadas o ampliadas cambiando el firmware
La salida analógica de 4 a 20 mA es independiente del circuito de medida, su rango
puede ser distinto al del instrumento.
La calibración e Idealización son realizados digitalmente.
Las técnicas digitales de acondicionamiento son más poderosas.
Compensa del drift del sensor con la ayuda de un sensor de temperatura.
Mayor exactitud.
Mayor rangeabilidad.
Autodiagnóstico.
Capacidad de comunicación, como en los instrumentos smart y digitales.
PROCEDIMIENTO:
Instalaremos el Transmisor de Presión modelo LD301 de la marca SMAR y leeremos sus
parámetros y realizaremos su configuración mediante El programa Pactware

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 55
1. Verificar las características técnicas del Transmisor de Presión modelo LD301,
podemos observar que demás de tener la capacidad de comunicación digital el
transmisor puede enviar señales analógicas de 4 a 20mA, esta señal analógica varia
de manera proporcional a la cantidad de presión ( Valor mínimo 4mA y valor máximo
20mA )
2. Conectar una fuente de 24VDC para alimentar al transmisor y en serie al circuito una
resistencia de 250 ohmios.
3. Luego realizaremos le conexión de los terminales del modem en paralelo a la
resistencia de 250ohmios.
4. Podemos emplear una compresora para generar señales de prueba y verificar las
lecturas registradas por el transmisor, instalar en el transmisor un adaptador para
poder conectar una manguera al compresor de aire.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 56
5. Retirar la tapa posterior del Transmisor y conectar los terminales del modem a COMM
TEST, estos terminales son las salidas de datos analógicos o digitales, la mayoría de
transmisores inteligentes poseen esta salida de comunicación que pueden soportar
protocolos como HART, PROFIBUS, CAN, etc.
6. Finalmente instalaremos el modem HART a la computadora (Workstation).
7. Después de instalar los equipos procedemos a la instalación del DTM para el
transmisor LD301 de la marca SMAR. Por cada nuevo transmisor que instalemos se
debe instalar su DTM (driver), para nuestro equipo será SMAR Device Library.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 57
8. Cuando se realice el proceso de instalación observaremos que se instalaran una serie
de librerías dentro de las que se encuentra la necesaria para transmisor.
9. Iniciamos el programa Pactware.
10. Agregaremos un nuevo dispositivo en la venta de proyecto.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 58
11. Configuramos la interface de comunicación y el puerto de comunicación serial, otro
parámetro que debemos tener en cuenta es la dirección del dispositivo, la dirección
por defecto será 0 cuando examinamos un dispositivo, esta dirección puede variar en
el caso de configurar más de un instrumento en red.
12. Después de crear la conexión COM1 procedemos a establecer comunicación con el
modem HART.
13. Como paso siguiente agregaremos un nuevo dispositivo.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 59
14. En la ventana de instalación de dispositivo seleccionamos el LD301 de la marca
SMART, luego presionamos el botón aceptar.
15. El dispositivo se encuentra instalado, ahora debemos establecer comunicación con el
transmisor.
16. Después de conectar el dispositivo, procedemos a leer los parámetros en línea del
instrumento.
17. Se abrirá una ventana de Parametraje en Línea, en ONLINE PARAMETRIZE
exploramos la opción Configuration/ Measurement podemos observar en que unidad
de medida trabaja el instrumento además los parámetros mínimo (Lower) y máximo
(Upper) de la medida de presión.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 60
18. Explorando la opción Configuration/ Display podemos configurar la variable que se
mostrara en el display (pantalla) del instrumento, es posible agregar un segundo
parámetro (en nuestro caso mediremos presión y el porcentaje de la variable del
proceso).
19. Toda configuración o modificación en el instrumento podremos verificarla después de
unos instantes en el instrumento.
20. Explorando la opción General/Multidrop podemos configurar la dirección que tendrá el
instrumento cuando sea configurado en una red multipunto.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 61
21. Finalmente después de realizar las modificaciones para que estas sean grabadas en
la memoria del instrumento ejecutamos la opción “escribir datos en el
instrumento”, en la propiedades del instrumento LD301.
Instala un HART Comunicator en un Proceso Industrial.
En esta actividad vamos a realizar la instalación y configuración de un HART
Comunicator en un proceso industrial, este instrumento se instalara en el puerto de
comunicación de un Transmisor, este a su vez pude estar instalado directamente en el
proceso, la ventaja de emplear este dispositivo está en su reducido tamaño comparándolo
con una computadora personal (Workstation), ambos son instrumentos inteligentes con la
capacidad de comunicación, el protocolo de comunicación manejado por estos
instrumentos es HART.
HART COMUNICATOR. Es un dispositivo PORTATIL que puede leer los datos enviados
por un instrumento inteligente en el protocolo de comunicación HART y mediante su
interfaz RS232 recibir los datos de la variable de proceso mediante el PACTWARE.
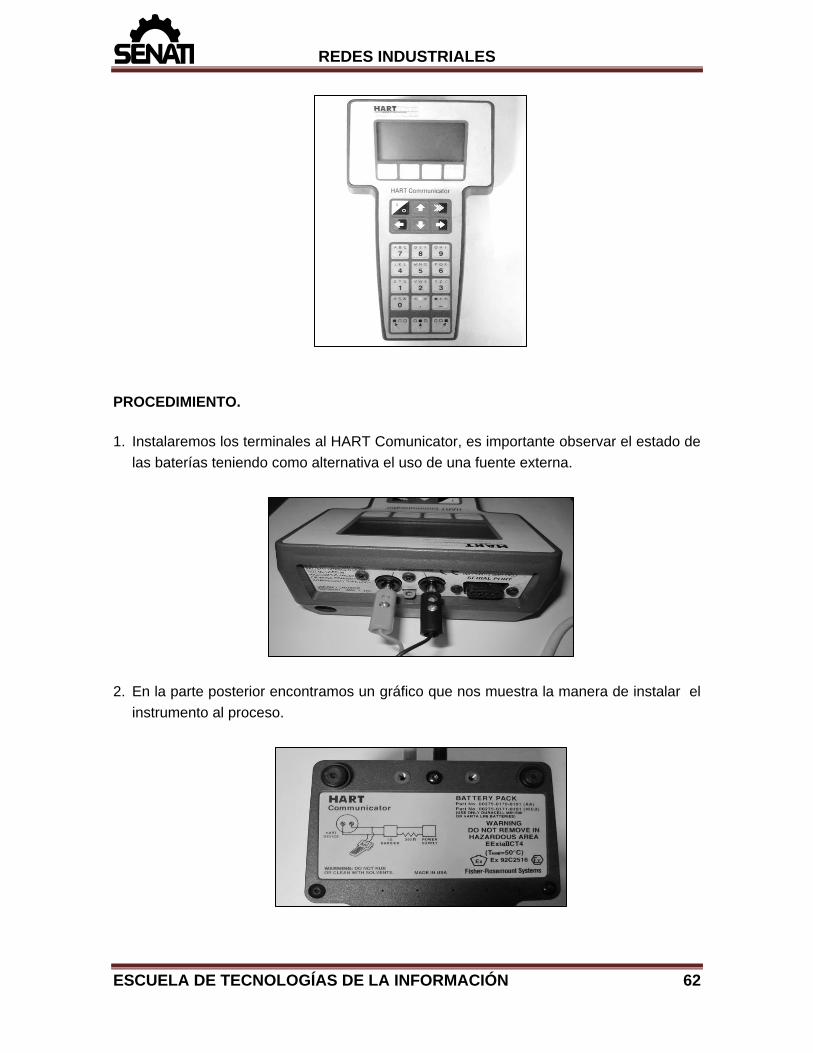
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 62
PROCEDIMIENTO.
1. Instalaremos los terminales al HART Comunicator, es importante observar el estado de
las baterías teniendo como alternativa el uso de una fuente externa.
2. En la parte posterior encontramos un gráfico que nos muestra la manera de instalar el
instrumento al proceso.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 63
3. Instalaremos una resistencia de 250 Ohmios en serie entra el transmisor y una fuente
externa de 24Vdc, en paralelo a este circuito se conectaran los terminales del HART
Comunicator.
4. Encendemos el Comunicator mientras inicializa su sistema se nos mostrara en su
pantalla grafica el mensaje : “ Self Test in Progress”
5. En la parte inferior de la pantalla el HART Comunicator tiene un teclado que permite el
desplazamiento por el menú del dispositivo, el ingreso y modificación de sus
parámetros. El botón que tiene el indicador I/O es empleado para encender-apagar el
equipo, los botones que tiene las flechas UP, DOWN se emplean para el
desplazamiento en el menú, la flecha izquierda se emplea a modo de ESC y la flecha
derecha se emplea como INTRO.
6. Debido a la velocidad de transferencia de datos del protocolo HART la lectura de los
parámetros del transmisor puede tardar unos minutos mientras esto sucede no
debemos retirar la conexión física del instrumento.
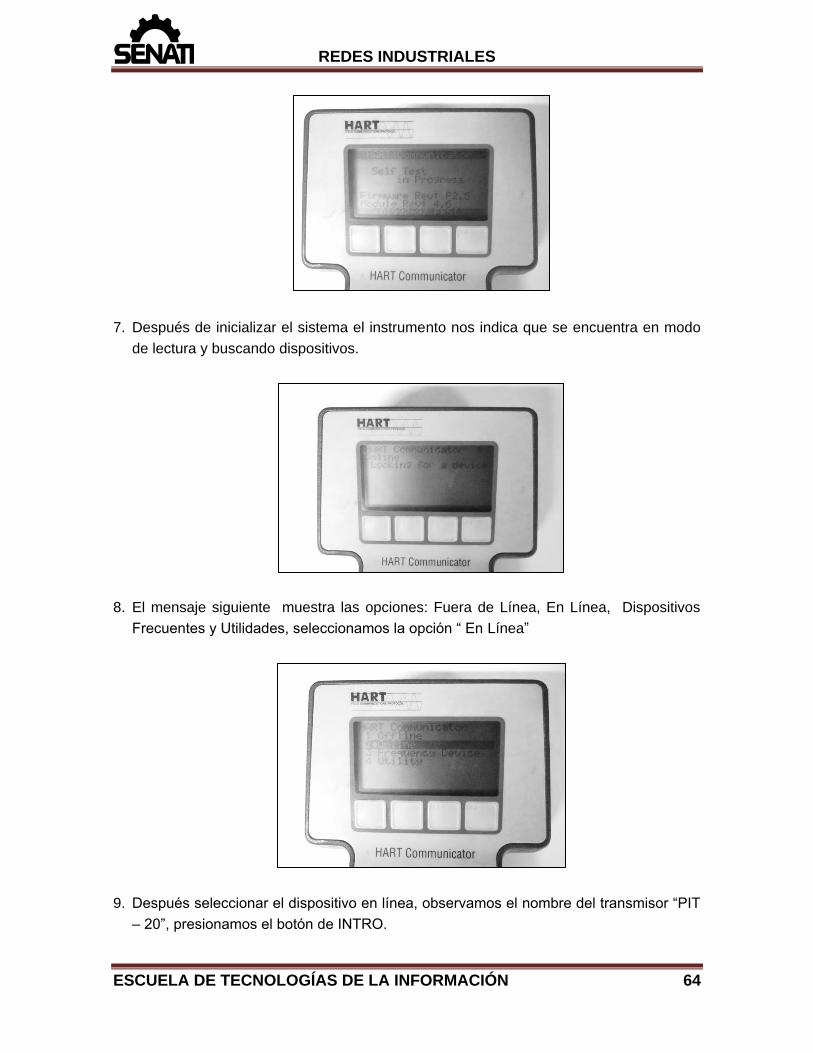
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 64
7. Después de inicializar el sistema el instrumento nos indica que se encuentra en modo
de lectura y buscando dispositivos.
8. El mensaje siguiente muestra las opciones: Fuera de Línea, En Línea, Dispositivos
Frecuentes y Utilidades, seleccionamos la opción “ En Línea”
9. Después seleccionar el dispositivo en línea, observamos el nombre del transmisor “PIT
– 20”, presionamos el botón de INTRO.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 65
10. Los parámetros relacionados al dispositivo son: Configuración de Dispositivo,
Variable de proceso PV, valor mínimo que registrara el instrumento PV-LRV y valor
máximo registrado PV-URV, seleccionamos “Configuración de Dispositivo,”
11. Podemos tener acceso a muchos parámetros del transmisor , en este instructivo
ingresaremos a la configuración básica
12. La opción Tag determinará el nombre que tomara el transmisor para el proceso en
este caso PIT-20, presionamos INTRO para modificar este valor.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 66
13. La opción PV Unit determinará la variable con la que trabajara el transmisor, a ser un
transmisor de presión la variable elegida es PSI, pero esta variable puede variar entre
Bar, mBar, etc.
14. La opción Información de dispositivo muestra un resumen de los parámetros del
transmisor, estos son los que se muestran al momento de leer en el dispositivo
cuando empleamos el programa Pactware.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 67
FUNDAMENTO TEÓRICO.
Buses de campo.
“Bus de campo” es un término genérico que describe un conjunto de redes de
comunicación para uso industrial, cuyo objetivo es sustituir las conexiones punto a punto
entre los elementos de campo y el equipo de control a través del tradicional bucle
de tensión o de corriente de 4-20 mA. Típicamente son redes digitales,
bidireccionales, multipunto, montadas sobre un bus serie, que conectan dispositivos
de campo como PLCs, transductores, actuadores y sensores. Cada dispositivo de campo
incorpora cierta capacidad de proceso, que lo convierte en un dispositivo
inteligente, manteniendo siempre un coste bajo. Cada uno de estos elementos será capaz
de ejecutar funciones simples de autodiagnóstico, control o mantenimiento, así como de
comunicarse bidireccionalmente a través del bus.
El objetivo es reemplazar los sistemas de control centralizados por redes para control
distribuido con las que mejorar la calidad del producto, reducir costes y mejorar la
eficiencia. Para ello se basa en que la información que envían y/o reciben los dispositivos
de campo es digital, lo que resulta mucho más preciso que si se recurre a métodos
analógicos. Además, cada dispositivo de campo es un dispositivo inteligente y puede
llevar a cabo funciones propias de control, mantenimiento y diagnóstico. De esta
forma, cada nodo de la red puede informar en caso de fallo del dispositivo
asociado, y en general sobre cualquier anomalía asociada al dispositivo. Esta
monitorización permite aumentar la eficiencia del sistema y reducir la cantidad de
horas de mantenimiento necesarias.
Ventajas de los buses de campo.
La principal ventaja que ofrecen los buses de campo y la que los hace más atractivos a
los usuarios finales, es la reducción de costo. El ahorro proviene fundamentalmente de
tres fuentes: ahorro en costo de instalación, ahorro en el costo de mantenimiento y
ahorros derivados de la mejora del funcionamiento del sistema.
Una de las principales características de los buses de campo es una significativa
reducción en el cableado necesario para el control de una instalación, cada célula de
proceso sólo requiere un cable para la conexión de los diversos nodos. En comparación
con otros tipos de redes, dispone de herramientas de administración del bus que
permiten la reducción del número de horas necesarias para la instalación y puesta en
marcha.
Los buses de campo ofrecen mayor flexibilidad al usuario en el diseño del
sistema. Algunos algoritmos y procedimientos de control que con sistemas de

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 68
comunicación tradicionales debían incluirse en los propios algoritmos de control radican
ahora en los propios dispositivos de campo, simplificando el sistema de control y sus
posibles ampliaciones.
También hay que tener en cuenta que las prestaciones del sistema mejoran con
el uso de la tecnología de los buses de campo debido a la simplificación en la forma de
obtener información de la planta desde los distintos sensores. Las mediciones de los
distintos elementos de la red están disponibles para todos los demás dispositivos, la
simplificación en la obtención de datos permitirá el diseño de sistemas de control más
eficientes. Con la tecnología de los buses de campo, se permite la comunicación
bidireccional entre los dispositivos de campo y los sistemas de control, pero
también entre los propios dispositivos de campo.
Otra ventaja de los buses de campo es que reducen a 3 el número de capas del modelo
OSI (Física, Enlace y Aplicación) para hacer más ágil su funcionamiento. Proporcionan
además un conjunto de servicios de administración. Al usuario sólo se le exige tener
un conocimiento mínimo de los servicios de administración de la red, ya que parte de la
información generada por dichos servicios puede ser necesaria para la reparación de
averías en el sistema.
Buses de campo existentes.
La estandarización es aún una asignatura pendiente. Las firmas del mundo de la
automatización industrial asumen el apoyo a uno u otro estándar, imponiendo así su uso a
aquellas empresas a las que venden sus productos, por lo tanto, en cualquier aplicación
industrial, es necesario asegurarse que todos los componentes de la red soporten un
mismo bus de campo, para que la comunicación no presente problemas o haya que
realizar pasarelas entre buses.
Debido a la falta de estándares, diferentes compañías han desarrollado diferentes
soluciones, cada una de ellas con diferentes prestaciones y campos de aplicación,
en una primera clasificación podríamos dividirlos en los siguientes grupos:
Buses de alta velocidad y baja funcionalidad.
Diseñados para integrar dispositivos simples como finales de carrera, fotocélulas, relés y
actuadores simples, funcionando en aplicaciones de tiempo real, y agrupados en una
pequeña zona de la planta, típicamente una máquina. Suelen especificar las capas física
y de enlace del modelo OSI, es decir, señales físicas y patrones de bits de las tramas.
Algunos ejemplos son:

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 69
Buses de alta velocidad y funcionalidad media.
Se basan en el diseño de una capa de enlace para el envío eficiente de bloques de datos
de tamaño medio. Estos mensajes permiten que el dispositivo tenga mayor funcionalidad
de modo que permite incluir aspectos como la configuración, calibración o
programación del dispositivo. Son buses capaces de controlar dispositivos de campo
complejos, de forma eficiente y a bajo coste. Normalmente incluyen la especificación
completa de la capa de aplicación, lo que significa que se dispone de funciones utilizables
desde programas basados en PCs para acceder, cambiar y controlar los diversos
dispositivos que constituyen el sistema. Algunos incluyen funciones estándar para
distintos tipos de dispositivos (perfiles) que facilitan la interoperabilidad de
dispositivos de distintos fabricantes. Algunos ejemplos son:
Buses de altas prestaciones.
Son capaces de soportar comunicaciones a nivel de toda la factoría, en muy
diversos tipos de aplicaciones. Aunque se basan en buses de alta velocidad, algunos
presentan problemas debido a la sobrecarga necesaria para alcanzar las características
funcionales y de seguridad que se les exigen. La capa de aplicación oferta un gran
número de servicios al usuario, habitualmente un subconjunto del estándar MMS. Entre
sus características incluyen

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 70
Algunos ejemplos son:
Buses para áreas de seguridad intrínseca.
Incluyen modificaciones en la capa física para cumplir con los requisitos específicos de
seguridad intrínseca en ambientes con atmósferas explosivas, la seguridad intrínseca
es un tipo de protección por la que el aparato en cuestión no tiene posibilidad de
provocar una explosión en la atmósfera circundante. Un circuito eléctrico o una parte de
un circuito tienen seguridad intrínseca, cuando alguna chispa o efecto térmico en
este circuito producidos en las condiciones de prueba establecidas por un estándar
(dentro del cual figuran las condiciones de operación normal y de fallo específicas) no
puede ocasionar una ignición. Algunos ejemplos son HART, Profibus PA
HART. Es un acrónimo en inglés para Transduction Remoto Direccionable en Red. El
Protocolo HART usa la norma Bell 202 Modulación por desplazamiento de frecuencia o
MDF (FSK en inglés) para empalmar señales digitales de comunicación a bajo nivel sobre
4 a 20 Ma.
Esto permite la comunicación bidireccional en campo y hace posible la transmisión de
información adicional más allá de sólo las variables normales de proceso comunicadas de
y hacia un instrumento inteligente de campo. El Protocolo HART se comunica a 1200 bps
sin interrumpir la señal de 4 a 20 mA y permite a la aplicación central (maestra) obtener

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 71
dos o más actualizaciones digitales por segundo de un dispositivo inteligente de campo.
Ya que la señal digital MDF es de fase continua no hay interferencia con la señal de 4 a
20 mA.
La Tecnología HART es un protocolo maestro/servidor, lo cual significa que un dispositivo
inteligente de campo (servidor) sólo habla cuando le habla un maestro. El Protocolo HART
se puede utilizar en diversos modos, como punto a punto o multipunto para transmitir
información hacia y desde los instrumentos inteligentes de campo y el control central o los
sistemas de monitoreo.
La comunicación HART se produce entre dos dispositivos habilitados con HART,
típicamente un dispositivo de campo inteligente y un sistema de control o monitoreo. La
comunicación se produce mediante un cable de instrumentación de calidad estándar y el
uso de prácticas de cableado y terminación estándar.
El protocolo HART proporciona dos canales de comunicación simultáneos: la señal
analógica de 4 a 20 mA y una señal digital. La señal de 4 a 20 mA comunica el valor
primario medido (en el caso de un instrumento de campo) con el circuito de corriente 4 a
20 mA, el estándar más rápido y más fiable de la industria. Información adicional del
dispositivo se comunica mediante una señal digital que se superpone a la señal analógica.
La señal digital contiene la información del dispositivo incluyendo el estado del dispositivo,
diagnóstico, valores medidos o calculados adicionales, etc. Juntos, los dos canales de
comunicación proporcionan una solución completa de comunicación de campo muy
robusta a bajo costo que es fácil de usar y configurar
El Protocolo HART suministra hasta dos maestros (primario y secundario). Esto permite
usar maestros secundarios como comunicadores de mano sin interferir con las
comunicaciones desde y hasta el maestro primario, es decir, el sistema de control /
monitoreo

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 72
El protocolo HART permite toda la comunicación digital con los dispositivos de campo en
configuración de red punto a punto o multipunto.
Configuración Multipunto. También hay una opción de modo de comunicación "ráfaga"
donde un solo dispositivo servidor puede transmitir continuamente un mensaje de
respuesta estándar HART. Con este modo de comunicación ráfaga opcional son posibles
mayores tasas de actualización y el uso normalmente se limita a la configuración punto a
punto.
Comparativa entre buses actuales.
Las tablas siguientes recogen las características generales, topológicas y de cableado de
los distintos estándares y las compara con la red Ethernet industrial

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 73
Comparativa general.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 74
Comparativa de cableado.
Comparativa de número de nodos y acceso al medio
AS-i: Aktuator Sensor Interface.
AS-i es un bus de campo desarrollado inicialmente por Siemens, para la
interconexión de actuadores y sensores binarios (www.as-interface.com). Actualmente
está recogido por el estándar IEC TG 17B.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 75
A nivel físico, la red puede adoptar cualquier tipo de topología: estructura en bus,
en árbol, en estrella o en anillo. Permite la interconexión de un máximo de 31 esclavos
en la versión 2.0 o 64 en la versión 2.1. La longitud máxima de cada segmento es de 100
metros. Dispone de repetidores que permiten la unión de hasta tres segmentos, y de
puentes hacia redes Profibus. Como medio físico de transmisión, emplea un único cable
que permite tanto la transmisión de datos como la alimentación de los dispositivos
conectados a la red. Su diseño evita errores de polaridad al conectar nuevos
dispositivos a la red. La incorporación o eliminación de elementos de la red no
requiere la modificación del cable.
El cable consta de dos hilos sin apantallamiento. Para lograr inmunidad al ruido, la
transmisión se hace basándose en una codificación Manchester. La señal con la
codificación Manchester se traduce en pulsos de corriente, que producen pulsos positivos
y negativos en la tensión de alimentación, que indican las transiciones en la señal. A partir
de la detección de dichas transiciones se reconstruye la secuencia de bits transmitida.
Cada esclavo dispone de hasta 4 entradas/salidas, lo que hace que la red pueda controlar
hasta 124 E/S digitales. La comunicación sigue un esquema maestro - esclavo, en la cual
el maestro interroga a las estaciones enviándoles mensajes (llamados telegramas) de 14
bits y el esclavo responde con un mensaje de 7 bits. La duración de cada ciclo
pregunta-respuesta es de 150 µs. En cada ciclo de comunicación se deben consultar
todos los esclavos, añadiendo dos ciclos extras para operaciones de administración del
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 76
bus (detección de fallos). El resultado es un tiempo de ciclo máximo de 5ms. para 31
esclavos.
INTERBUS.
INTERBUS es un bus de campo para la interconexión de sensores y actuadores. Las
partes claves de INTERBUS han sido estandarizadas en Alemania por la DKE
(Deutsche Elektrotechnische Kommission para DIN y VDE). En 1993, se publicó la norma
DIN E 19 258. Esta norma cubre los protocolos de transmisión y los servicios que necesita
para la comunicación de datos de proceso. Las especificaciones para la transmisión de
parámetros han sido publicadas en el DIN Report 46 (1995).
INTERBUS se basa en un esquema maestro-esclavo. El maestro del bus actúa
simultáneamente como interfaz con los niveles superiores de la jerarquía de
funcionamiento interno es en anillo, es decir, todos los dispositivos están conectados
formando un camino cerrado aunque el aspecto del cableado es un bus. El anillo
principal es el que parte del maestro, aunque pueden formarse otros anillos para
adaptarse a la estructura particular de cada sistema. Este tipo de conexiones se
lleva a cabo mediante unos equipos denominados módulos terminadores de bus.
Un rasgo distintivo de INTERBUS es que las líneas de envío y recepción de datos están
contenidas dentro de un mismo cable que une todos los dispositivos. De esta forma, el
sistema tiene el aspecto físico de un bus o un árbol. Típicamente, la capa física se basa
en el estándar RS-485. Debido a la estructura de anillo y a que es necesario
transportar la masa de las señales lógicas, INTERBUS requiere un cable de cinco
hilos para interconectar dos estaciones. Con velocidades de transmisión de 500 Kbps,
pueden alcanzarse distancias de hasta 400 m entre dispositivos. Cada dispositivo
incorpora una función de repetidor que permite extender el sistema hasta una longitud
total de 13 Km. Para facilitar el funcionamiento de INTERBUS, el número máximo de
estaciones está limitado a 512.
La estructura punto a punto de INTERBUS y su división en anillo principal y subanillos es
ideal para la incorporación de distintos medios de transmisión en distintas zonas de la
planta si esto fuese necesario. La estructura de anillo ofrece dos ventajas. La
primera es que permite el envío y recepción simultánea de datos (full duplex). En
segundo lugar, la capacidad de autodiagnóstico del sistema se ve mejorada, ya que la
conexión de cada nodo a la red es activa. INTERBUS permite la detección preventiva de
errores por medio de una evaluación estadística de la calidad de las transmisiones.
La determinación de la frecuencia de los errores de transmisión permite prever la
aparición de fallo en un componente de la red.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 77
Para facilitar la detección de errores y la puesta en marcha del sistema,
INTERBUS permite la desconexión transparente de los subanillos conectados al
anillo principal. El direccionamiento se basa en la posición física de cada sistema
dentro del anillo, aunque opcionalmente se dispone de la posibilidad del empleo de
direcciones lógicas para acceder a dispositivos individuales
independientemente de su posición.
El protocolo de transmisión de INTERBUS se estructura en tres capas que se
corresponden con capas del modelo OSI. La capa 1 es la capa física. Especifica
aspectos como la velocidad, modos de codificación de la señal física, etc. La capa 2 se
corresponde con la capa de enlace. Garantiza la integridad de los datos y permite el
soporte de dos tipos de datos, por una parte los datos correspondientes a procesos
cíclicos, y por otra parte datos que aparecen asíncronamente. La capa de enlace es
determinista, es decir, garantiza un tiempo máximo para el transporte de datos entre
dispositivos. El control de acceso al medio se encuadra dentro de los mecanismos TDMA
(Time Division Multiple Access), eliminando así la posibilidad de colisiones. Cada
dispositivo tiene reservado un slot de tiempo adecuado para su función dentro del
sistema. El tiempo de ciclo es la suma de los tiempos asignados a cada dispositivo.
Pueden definirse slots adicionales para la transmisión de bloques de datos en modo
conexión. De esta forma pueden enviarse grandes bloques de datos a través de
INTERBUS, sin alterar el tiempo de ciclo para los datos de proceso. Otra ventaja
importante que incorpora este tipo de control de acceso al medio, es que todos los
elementos insertan sus datos en el bus simultáneamente, lo que garantiza que las
mediciones en las que se basan los bucles de control, fueron realizadas
simultáneamente.
La trama se forma por concatenación de los datos de cada estación. De forma
física se realiza mediante un registro. Cada dispositivo se une al anillo mediante un
registro cuya longitud depende de la cantidad de información que debe transmitir. Los
datos provenientes de las distintas estaciones van llegando al master en función de
su posición dentro del anillo. Cada ciclo de transmisión comienza con una secuencia
de datos que contiene la palabra de “loopback” seguida de los datos de salida de los

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 78
distintos dispositivos, en la línea de salida. Durante el envío de datos, el flujo de
retorno entra el maestro como flujo de entrada. Tras el envío de la trama completa, se
envía un CRC de 32 bits. Debido a la estructura de conexiones punto a punto, el cálculo
del CRC siempre se hace entre cada dos nodos. Por último se envía una palabra de
control para indicar el estado de cada dispositivo (detección de errores de transmisión,
etc.). Si no hubo errores comienza un nuevo ciclo.
Además de los ciclos de datos, también hay ciclos de identificación. Este ciclo
permite la administración del bus. Cada dispositivo tiene un código de identificación
que indica el tipo de dispositivo de que se trata, y el tamaño de su bloque de datos. La
configuración del bus se lleva a cabo por una secuencia de ciclos de identificación en los
que el maestro comienza a leer en orden, la identificación de los dispositivos conectados.
En función de estas lecturas se configura la trama que circulará en el ciclo de datos.
Desde el punto de vista físico INTERBUS funciona según un procedimiento
asíncrono de arranque y parada. Se envía una cabecera que contiene información
adicional como por ejemplo los delimitadores de trama, código de función y tipo de
mensaje, junto con ocho bits de datos adicionales. Los momentos de inactividad se
ocupan con mensajes de estado. No contienen datos de la capa de enlace y sólo sirven
para garantizar una actividad permanente en el medio de transmisión. Si dicha actividad
se interrumpe durante más de 20 ms, se interpreta por todos los dispositivos como una
caída del sistema. En respuesta a esta situación, los dispositivos se desconectan de la
red y van a un punto seguro definido con antelación. La tercera de las capas de
INTERBUS corresponde la capa de aplicación.
En el maestro se ejecuta de forma cíclica un programa que actualiza
continuamente los datos correspondientes a los distintos procesos conectados a la red, y
los deja accesibles para el sistema de control, de modo que por ejemplo un PLC
puede acceder a ellos de forma sencilla mediante instrucciones de entrada/salida.
El uso de técnicas de acceso directo a memoria evita el uso de servicios que
necesitan grandes bloques de datos, lo que facilita la consecución del tiempo real. El
acceso desde ordenadores se realiza mediante adaptadores adecuados para conectarlos
al bus. INTERBUS implementa en la capa de aplicación un subconjunto de servicios
basados en MMS que se denomina PMS (Peripherals Message Specification). Incluye
unos 25 servicios que permiten la comunicación con dispositivos de proceso
inteligentes. Estos servicios permiten por ejemplo el establecimiento y monitorización
de conexiones, lectura y escritura de parámetros o la ejecución remota de
programas.
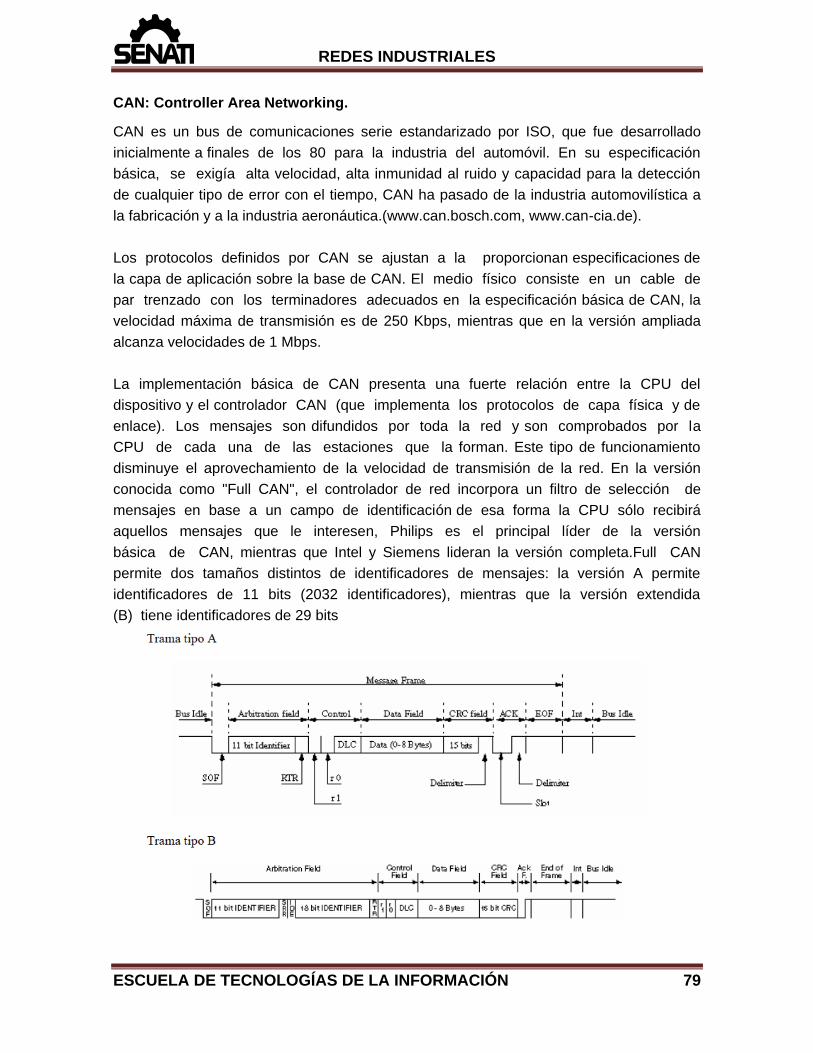
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 79
CAN: Controller Area Networking.
CAN es un bus de comunicaciones serie estandarizado por ISO, que fue desarrollado
inicialmente a finales de los 80 para la industria del automóvil. En su especificación
básica, se exigía alta velocidad, alta inmunidad al ruido y capacidad para la detección
de cualquier tipo de error con el tiempo, CAN ha pasado de la industria automovilística a
la fabricación y a la industria aeronáutica.(www.can.bosch.com, www.can-cia.de).
Los protocolos definidos por CAN se ajustan a la proporcionan especificaciones de
la capa de aplicación sobre la base de CAN. El medio físico consiste en un cable de
par trenzado con los terminadores adecuados en la especificación básica de CAN, la
velocidad máxima de transmisión es de 250 Kbps, mientras que en la versión ampliada
alcanza velocidades de 1 Mbps.
La implementación básica de CAN presenta una fuerte relación entre la CPU del
dispositivo y el controlador CAN (que implementa los protocolos de capa física y de
enlace). Los mensajes son difundidos por toda la red y son comprobados por la
CPU de cada una de las estaciones que la forman. Este tipo de funcionamiento
disminuye el aprovechamiento de la velocidad de transmisión de la red. En la versión
conocida como "Full CAN", el controlador de red incorpora un filtro de selección de
mensajes en base a un campo de identificación de esa forma la CPU sólo recibirá
aquellos mensajes que le interesen, Philips es el principal líder de la versión
básica de CAN, mientras que Intel y Siemens lideran la versión completa.Full CAN
permite dos tamaños distintos de identificadores de mensajes: la versión A permite
identificadores de 11 bits (2032 identificadores), mientras que la versión extendida
(B) tiene identificadores de 29 bits

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 80
La capa de enlace define el formato y la temporización usada para la transmisión de los
mensajes. Las tramas CAN tienen dos bytes descriptores y hasta 8 bytes de datos. Los
descriptores definen la prioridad de los mensajes y su tipo. El primer campo o campo de
arbitraje está formado por los 11 bits del identificador (en tramas tipo A) y el bit RTR si
RTR vale 0, indica que se trata de una trama de datos, mientras que si vale 1 indica que
se trata de una petición de datos, en ese caso, el campo de datos indicará los bytes que
formarán la respuesta.
El campo de control está formado por 6 bits Los bits r1 y r0 están reservados
para futuras ampliaciones del protocolo, los cuatro bits que forman el DLC indican
el número de bytes que forman la trama de datos y que van a continuación.
El campo de datos contiene de cero a ocho bytes el bit más significativo de cada byte es
el primero que se transmite a continuación hay un campo de CRC, que contiene un código
de redundancia cíclica de 15 bits y un bit delimitador que siempre vale 1 el campo de
acuse de recibo consiste en dos bits. El primer bit se envía a 1 y es puesto a cero por las
estaciones que reciben correctamente el mensaje el segundo es un bit delimitador que
vale 1 el delimitador de final de trama consiste en 7 bits a 1, tras cada trama hay un
período de tres bits (deben estar a 1), destinado a dar un tiempo mínimo a las estaciones
a prepararse para la recepción o envío de otro mensaje.
Las tramas de tipo B se diferencian en el campo de arbitraje. En este caso hay un primer
grupo de 11 bits similar al de las tramas de tipo A, y que actúa como valor base del
identificador. La segunda parte del identificador (18 bits) es la extensión del identificador.
Para distinguir ambos formatos, la trama tipo B incorpora dos bits que separan los dos
trozos del identificador el primero es el bit SRR (Substitute Remote Request). Se envía
siempre a 1 para dar prioridad a las tramas de datos estándar de tipo A con el mismo
identificador base. El bit IDE que sigue al bit SRR se envía siempre a 1, y permite
distinguir tramas tipo A y tipo B.
PROFIBUS.
PROFIBUS es una especificación de bus de campo para una amplia gama de
aplicaciones dentro de los campos de fabricación, industria de procesos o
automatización de edificios (www.profibus.com). PROFIBUS puede ser usado tanto
en aplicaciones en las que el tiempo de respuesta de las comunicaciones es crítico, como
en redes de comunicaciones complejas que involucren un gran número de necesidades
de comunicación. Existen tres versiones de PROFIBUS, todas ellas compatibles
entre si.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 81
PROFIBUS-DP: Optimizado para aplicaciones de alta velocidad y bajo coste. Se
diseñó específicamente para cubrir la comunicación entre sistemas de control
automático y la periferia descentralizada al nivel de dispositivo. PROFIBUS-DP
puede usarse para sustituir los antiguos bucles de corriente 0-20 mA.
PROFIBUS-PA: está diseñado especialmente para la automatización en la
industria de procesos. Su principal diferencia con PROFIBUS-DP es que la capa
física permite su utilización incluso en zonas de seguridad intrínseca.
PROFIBUS-PA permite la comunicación de datos y la alimentación de los equipos a
través de un único par de hilos siguiendo el estándar IEC 1158-2.
PROFIBUS-FMS: es la solución de propósito general para la comunicación al nivel de
célula. Los servicios que incorpora PROFIBUS-FMS dotan al sistema de una
gran flexibilidad.
Características Básicas.
PROFIBUS especifica las características técnicas y funcionales de un bus de campo que
permite la unión de los equipos de control con su periferia descentralizada, desde el nivel
de campo hasta el nivel de célula. En los sistemas PROFIBUS se diferencian dos
tipos de estaciones, Maestros y Esclavos. Los dispositivos Maestro determinan las
comunicaciones de datos a través del bus. Un maestro puede enviar mensajes sin
necesidad de recibir una petición externa para que lo haga cuando logra el control de
medio mediante la consecución del testigo. En terminología PROFIBUS, también se
denominan estaciones activas.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 82
Los dispositivos esclavo o dispositivos periféricos incluyen los dispositivos de
entrada/salida, válvulas, accionadores o dispositivos de medida. No tienen capacidad para
acceder directamente al bus y sólo pueden enviar acuses de recibo de mensajes enviados
por algún maestro, o contestar a las peticiones de datos que éstos les hagan. Por
ello, los esclavos también se denominan estaciones pasivas. Como sólo necesitan
implementar una parte del control de acceso al medio, su fabricación resulta más barata.
Arquitectura de Protocolo PROFIBUS.
La arquitectura de protocolos de PROFIBUS se basa en el modelo de referencia OSI, de
acuerdo con el estándar ISO 7498.
PROFIBUS-DP. define las capas física y de enlace, así como el interfaz de usuario.
Las capas 3 a 7 no están definidas. El DDLM (Direct Data Link Mapper)
proporciona un interfaz de usuario sencillo para el acceso a la capa 2. Como medio
físico se usa la tecnología RS-485, fibra óptica o ambas.
PROFIBUS-FMS. se definen las capas física, de enlace y de aplicación. La capa de
aplicación consiste en el FMS (Fieldbus Message Specification) y el LLI (Lower
Layer Interface). FMS contiene el protocolo de aplicación y proporciona al usuario un
amplio conjunto de servicios. LLI permite proporcionar a FMS una interfaz
independiente del dispositivo con la capa de enlace. Dicha capa implementa el
protocolo de acceso al bus y la seguridad de datos. Como medio físico se
emplea RS-485, fibra óptica o ambas.
PROFIBUS-PA. utiliza el protocolo de PROFIBUS-DP y le añade como característica
particular la definición de los perfiles de dispositivo. Como medio de transmisión utiliza
el estándar IEC 1158-2, lo que permite su utilización en zonas de seguridad
intrínseca. Mediante un puente es posible acoplar fácilmente las redes PROFIBUS-
DP con las redes PROFIBUS-PA. Por su parte, PROFIBUS-DP y PROFIBUS-FMS
usan las mismas tecnologías de transmisión y un protocolo uniforme de acceso al
medio, por ello, ambas pueden operar simultáneamente sobre el mismo cable.
Control de Acceso al Medio en PROFIBUS.
Las tres versiones de PROFIBUS usan el mismo control de acceso al medio,
incluyendo los aspectos relacionados con la seguridad de los datos y el manejo de los
protocolos de transmisión y los telegramas. En PROFIBUS, la capa 2 se denomina
FDL (Fieldbus Data Link). El MAC es determinista, de modo que sólo una estación
tiene derecho a transmitir en cada momento. En particular ha sido diseñado para
cumplir dos objetivos:

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 83
En las comunicaciones entre sistemas activos (maestros), encargados de tareas
de control complejas, debe asegurarse que cada estación tenga suficiente tiempo para
ejecutar sus tareas de comunicación dentro de un intervalo de tiempo definido.
Las tareas de comunicación cíclicas se implementarán de la forma más sencilla
posible para permitir la comunicación entre un maestro y uno o varios esclavos.
Por tanto, el control de acceso al medio de PROFIBUS incluye un sistema de paso de
testigo en bus (Token-bus) entre los maestros, junto con un sistema de
consulta maestro-esclavo para la comunicación entre cada maestro y su periferia.
El mecanismo de paso de testigo garantiza el derecho a acceder al bus de cada maestro
durante un determinado período de tiempo. El paso de testigo es un telegrama especial
que permite la cesión al nodo que lo recibe, del derecho a acceder al bus. El
testigo sigue una secuencia según un anillo lógico, con un tiempo máximo
predeterminado para la rotación completa del testigo. La comunicación maestro-esclavo
permite que el maestro que posee el testigo en un instante determinado se
comunique con los esclavos que dependan de él.
El maestro puede enviar mensajes a los esclavos y leer las contestaciones de éstos. De
esta forma es posible tener un sistema con un único maestro y múltiples esclavos, un
sistema formado sólo por estaciones activas, o un sistema híbrido.
La capa de enlace también es el encargado de la seguridad de los datos. Todos los
telegramas tienen distancia Hamming 4, debido al uso de delimitadores de comienzo y
fin de trama especiales, así como un bit de paridad para cada byte según se define en el
estándar IEC 870-5-1.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 84
TAREA 3: DETERMINA Y CONFIGURA LOS ELEMENTOS EN
UNA RED INDUSTRIAL.
Hoy en día las tecnologías que triunfan en el mercado son aquellas que ofrecen las
mejores ventajas y seguridad a los clientes, cada vez se está acabando con tecnologías
cerradas; que en un mundo en proceso de globalización, es imposible que sobrevivan.
A nivel industrial se está dando un gran cambio, ya que no solo se pretende trabajar con
la especificidad de la instrumentación y el control automático, sino que existe la necesidad
de mantener históricamente información de todos los procesos, además que esta
información este también en tiempo real y que sirva para la toma de decisiones y se
pueda así mejorar la calidad de los procesos. Las condiciones extremas a nivel industrial
requieren de equipos capaces de soportar elevadas temperaturas, ruido excesivo, polvo,
humedad y demás condiciones adversas; pero además requiere de personal capaz de ver
globalmente el sistema de control y automatización industrial junto con el sistema de red
digital de datos.
Equipos y Materiales:
Computador Pentium 4 o superior.
Sistema operativo Windows XP o superior.
Controlador lógico Programable Micrologix, Simatic S7-1200 o superior.
Equipo concentrador de red D-LINK.
Equipo concentrador de red inalámbrica D-LINK DWL-2100AP.
Programa de Automatización Industrial RS Logix500, RSLinx, TIA Portal11.
Cable de comunicación de datos según norma TIA 568-B.
Orden de Ejecución:
Instalación de los Automatización Industrial en la computadora.
Implementación de las tareas y comprobación del correcto funcionamiento de los
equipos.
Instala un controlador lógico programable a una red Ethernet.
En esta actividad vamos a realizar la instalación de un controlador lógico programable en
una red Ethernet, la finalidad de hacer esta configuración leer sus parámetros, descargar

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 85
y actualizar sus programas de manera remota, podremos cambiar su dirección para evitar
conflictos con algún otro dispositivo en la red industrial.
Después de preparar el cable de comunicación de datos para red Ethernet según la
norma TIA-568-B procedemos a la instalación del controlador lógico programable (PLC)
marca Allen Bradley modelo Micrologix 1100, este equipo tiene integrado un puerto de
comunicaciones Ethernet, el proceso de instalación se muestra a continuación:
Ethernet Industrial.
Ethernet industrial es el nombre dado a la utilización del protocolo Ethernet en un entorno
industrial, de automatización y control de máquinas de producción.
Industrial Ethernet (IE) se centra en la producción de elementos que hacen que una
empresa rentable a través de algún proceso de fabricación. Industrial Ethernet, a veces
denominado Producción Ethernet está diseñado para mantener el control de un proceso
de producción durante el seguimiento de la producción de muchos artículos
tradicionalmente relegado al mundo analógico, como temperatura, humedad, pH, presión,
flujo, viscosidad, densidad, peso, la vibración, RPM, tensión, corriente, radiación, control
de movimiento total robótica con retroalimentación, acceso y control por satélite, circuito
cerrado de televisión con HD de movimiento, voz y de intercomunicación, etc.
Ethernet industrial no se trata sólo de una versión más robusta de TI de Ethernet. Ethernet
industrial se centra en el entorno de producción y no debe nunca confundirse con el
entorno de TI tradicional. IE requiere mucho normas más estrictas para los productos que
se han desplegado, ya que están habitualmente en entornos de fábrica, cerca de
interferencia electromagnéticas, dispositivos como motores, mecánicos y de alta
humedad, altas temperaturas o el frío, de alto contenido químico, comparativamente con
el entorno Ethernet TI tradicional donde la mayoría de los dispositivos de TI que han
sido diseñados para utilizar entornos de oficina.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 86
PROCEDIMIENTO.
1. Instalamos una fuente de 24Vdc, conectamos sus terminales al ingreso de energía del
controlador (si trabajamos con un controlador Micrologix 1100 la fuente viene
integrada), esperamos unos instantes mientras el controlador inicializa.
2. Conectar el conector de enlace de red en el puerto del controlador.
3. El controlador lógico programable (PLC) fue previamente grabado con la dirección
192.168.1.250, abrimos el explorador de Windows y verificamos esta dirección IP, se
debe tener en cuenta que esta que el IP es definida por el administrador de la red y
puede variar.
4. Luego de realizar la exploración y búsqueda de la dirección antes mencionada el
explorador nos mostrara una ventada con los datos cargados desde el Firmware del
controlador: Nombre de dispositivo, Modelo, Dirección MAC, Dirección IP, modo de
operación.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 87
5. Para acceder a los datos del dispositivo, se requiere las credenciales del administrador
del equipo, los datos de fábrica son los siguientes usuario: Administrator, contraseña:
ml1100 (para el modelo Micrologix 1400 la contraseña es ml1400).
6. Después de ingresar los datos del administrador podremos ver los datos del
controlador, si estos datos no son correctos podemos escribir lo siguiente, usuario:
guest, contraseña guest.
7. La primera opción de datos nos indicara: nombre de archivo, tipo y nivel de acceso.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 88
8. La opción de diagnóstico indicará: velocidad de transmisión, modo de comunicación y
conexiones Ethernet establecidas.
9. La opción estado de la red indicara: bytes enviados y recibidos, comandos enviados y
recibidos.
.
10. Para cambiar la contraseña del administrador o de los usuarios ingresamos a la
opción manejo de usuarios como se indica en el grafico siguiente.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 89
CONFIGURA UN CONTROLADOR LÓGICO PROGRAMABLE A UNA RED
ETHERNET.
Configura un controlador lógico programable Micrologix a una red Ethernet.
En esta actividad vamos a configurar un controlador lógico programable, asignaremos su
dirección IP para acceder remotamente, estableceremos comunicación en línea y
descargaremos un programa al controlador
CONTROLADOR LÓGICO PROGRAMABLE MICROLOGIX. El Controlador lógico
programable MicroLogix 1100 está diseñado para ampliar la cobertura de aplicación por
entradas análogas integradas, Otra de las ventajas que provee este PLC es que viene
integrado con comunicación de Ethernet y capacidades de visualización. El controlador
MicroLogix 1100 tiene la capacidad de editar el programa en línea. Cada MicroLogix 1100
cuenta con 16 I/O digitales y salidas a relé.
Este PLC cuenta con la capacidad de expandir sus entradas y salidas, usando los mismos
módulos que el MicroLogix 1200.Se pueden expandir lasI/O con un máximo de 4 módulos
de expansión. Este PLC se programa con el programa RSLogix 500 en lenguaje escalera
y dentro de este se puede hacer la edición en línea, cada módulo está diseñado para
soportar comunicación RS-232/RS-485 puerto combinado para serial y comunicación de
red, y un segundo puerto incluido en este que es el puerto para comunicación Ethernet de

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 90
mensajería punto a punto. Cuenta además con una pantalla LCD que permite monitorear
al controlador y el estado de las I/O, así como permite realizar cambios de bit o datos
enteros
PROCEDIMIENTO.
Después de preparar el cable de comunicación de datos para red Ethernet según la
norma TIA-568-B procedemos a la instalación del controlador lógico programable (PLC)
marca Allen Bradley modelo Micrologix 1100, este equipo tiene integrado un puerto de
comunicaciones Ethernet, el proceso de instalación se muestra a continuación:
1. Instalamos una fuente de 24Vdc, conectamos sus terminales al ingreso de energía del
controlador (si trabajamos con un controlador Micrologix 1100 la fuente viene
integrada), esperamos unos instantes mientras el controlador inicializa veremos que se
enciende el indicador RUN.
2. Conectar el cable de enlace de red en el puerto del controlador.
3. Conectar el cable de enlace de red a la computadora.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 91
4. Todos los controladores vienen con una dirección MAC grabada, esta no puede
modificarse, por otro lado la dirección IP debemos asignarla mediante un programa
denominado BOOTP-DHCP Server que se encuentra en la carpeta Rockwell Software.
5. En el programa BOOTP-DHCP podemos asignar la dirección IP que tendrá el
controlador en la red industrial, para ello debemos asignar la puerta de enlace,
mascara de subred, DNS y nombre de dominio.
6. Después de escribir la dirección que tendrá el controlador se abrirá el entorno del
programa BOOTP-DHCP, luego de unos instantes aparecerá en la dista de dispositivos
en línea, podremos identificar la dirección MAC del equipo.
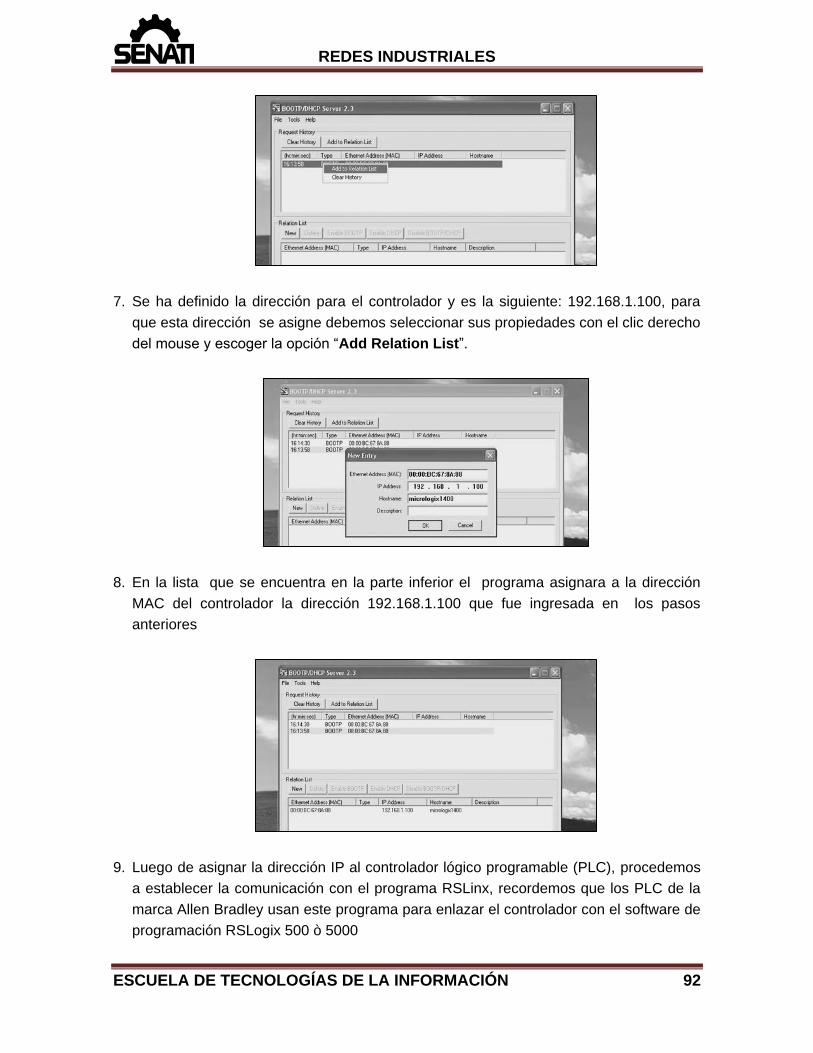
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 92
7. Se ha definido la dirección para el controlador y es la siguiente: 192.168.1.100, para
que esta dirección se asigne debemos seleccionar sus propiedades con el clic derecho
del mouse y escoger la opción “Add Relation List”.
8. En la lista que se encuentra en la parte inferior el programa asignara a la dirección
MAC del controlador la dirección 192.168.1.100 que fue ingresada en los pasos
anteriores
9. Luego de asignar la dirección IP al controlador lógico programable (PLC), procedemos
a establecer la comunicación con el programa RSLinx, recordemos que los PLC de la
marca Allen Bradley usan este programa para enlazar el controlador con el software de
programación RSLogix 500 ò 5000

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 93
10. Procedemos a la configuración del driver de comunicación, seleccionamos en la barra
de menú del programa Comunications / Configure Drivers.
11. Seleccionamos en La opción drivers disponibles y en ella de la lista desplegable
Ethernet Devices; en la operación anterior establecimos comunicación por el puerto
serie, ahora realizaremos la conexión por el puerto Ethernet.
12. Presionamos el botón Add New, con esta acción se abrirá una ventana que indicara
el nombre que tendrá nuestra conexión es este caso será AB_ETH-1.
13. En la lista de dispositivos configurados RSlinx mostrará la dirección IP que
configuramos en el programa BOOTP-DHCP.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 94
14. Presionamos el botón Start para iniciar la comunicación entre el controlador y el
programa RSLinx, en este momento el programa RSLogix puede estar en línea con
el controlador para ser programado.
15. Podemos visualizar en la relación de equipos conectados con la computadora
Workstation-PC05, una conexión AB_ETH, Ethernet, al seleccionarla en la parte
derecha del programa aparecerá un icono que representa al controlador con la
dirección asignada.
16. Después de comunicar el controlador programable, procedemos a leer en la memoria
de programa, en la barra de menú del programa RSLogix500 realizaremos la
configuración del driver de comunicación instalado, seleccionamos la opción Tools /
Options.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 95
17. Configuramos el driver instalado en el programa RSLinx en la ventana System
Options, aquí seleccionamos en la lista desplegable la opción AB_ETH-1. Podemos
examinar si el controlador está en línea presionando el botón Who Active, también
podemos examinar el programa del controlador programable y subirlo al programa
RSLogix presionando el botón Upload.
18. El programa descargara en la programa desde el controlador, esto permitirá realizar
modificaciones o actualizaciones el programa Ladder que se encuentra instalado el
PLC.
19. El programa RSlogix500 nos consultará si deseamos conectar al controlador
programable en línea, aceptamos y presionamos el botón SI.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 96
20. Finalmente procedemos a depurar o realizar las modificaciones necesarias del
programa que se encuentra grabado en el PLC, con esta operación comprobamos la
comunicación Ethernet entre la computadora Workstation, PC05 y el controlador
programable (PLC). Podemos hacer esta configuración de manera remota mediante
un punto de acceso o cualquier otro dispositivo que soporte comunicación Ethernet
CONFIGURA UN CONTROLADOR LÓGICO PROGRAMABLE SIEMENS S7-
1200 A UNA RED PROFINET.
En esta actividad vamos a realizar la creación de un nuevo proyecto y configuración del
controlador lógico programable PLC de la marca Siemens Modelo S7-1200, este
controlador es una versión mejorada del conocido S7-200 y viene con un puerto Ethernet
integrado (PROFINET). Luego de haber establecido creado el proyecto realizaremos la
comunicación y asignaremos una dirección IP del controlador para que pueda ser
empleado por las demás aplicaciones en el proceso.
SIMATIC S7-1200.
Este PLC que destaca por su versátil y flexible configuración aunada a alto rendimiento y
tamaño muy compacto. El nuevo sistema de ingeniería Simatic Step 7 Basic permite
configurar tanto el controlador como los paneles básicos para HMI (interfaz hombre-
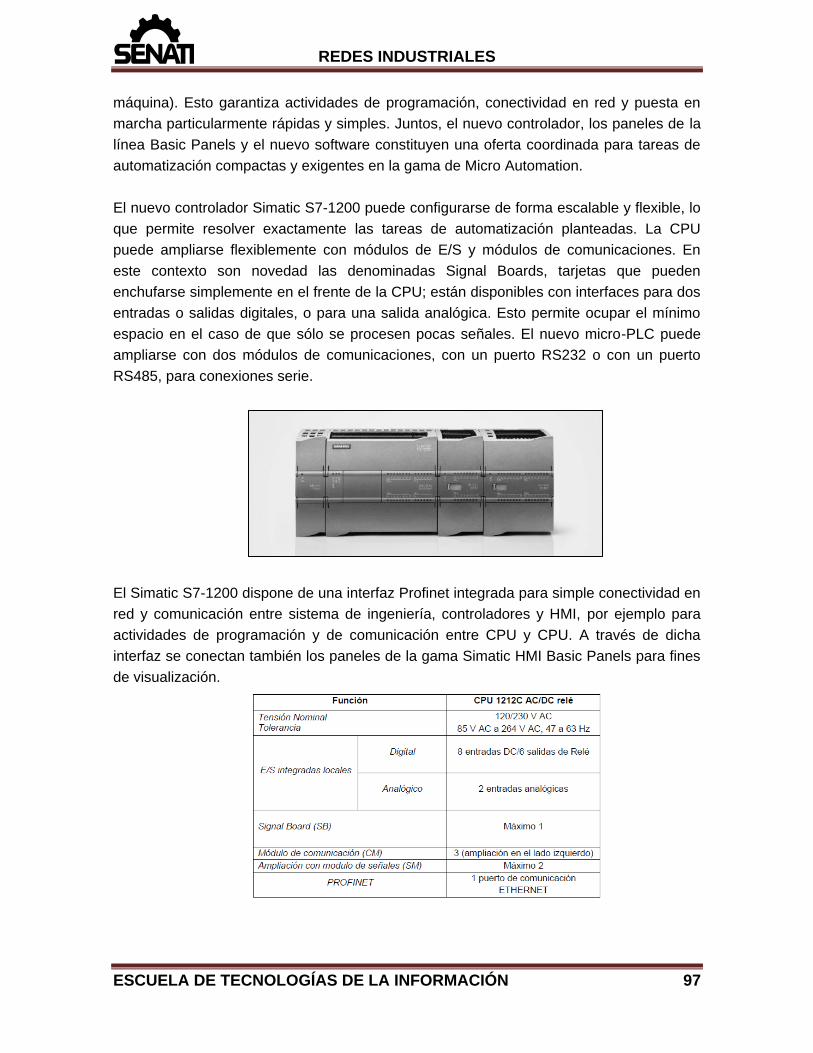
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 97
máquina). Esto garantiza actividades de programación, conectividad en red y puesta en
marcha particularmente rápidas y simples. Juntos, el nuevo controlador, los paneles de la
línea Basic Panels y el nuevo software constituyen una oferta coordinada para tareas de
automatización compactas y exigentes en la gama de Micro Automation.
El nuevo controlador Simatic S7-1200 puede configurarse de forma escalable y flexible, lo
que permite resolver exactamente las tareas de automatización planteadas. La CPU
puede ampliarse flexiblemente con módulos de E/S y módulos de comunicaciones. En
este contexto son novedad las denominadas Signal Boards, tarjetas que pueden
enchufarse simplemente en el frente de la CPU; están disponibles con interfaces para dos
entradas o salidas digitales, o para una salida analógica. Esto permite ocupar el mínimo
espacio en el caso de que sólo se procesen pocas señales. El nuevo micro-PLC puede
ampliarse con dos módulos de comunicaciones, con un puerto RS232 o con un puerto
RS485, para conexiones serie.
El Simatic S7-1200 dispone de una interfaz Profinet integrada para simple conectividad en
red y comunicación entre sistema de ingeniería, controladores y HMI, por ejemplo para
actividades de programación y de comunicación entre CPU y CPU. A través de dicha
interfaz se conectan también los paneles de la gama Simatic HMI Basic Panels para fines
de visualización.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 98
Para la conexión en red de varios controladores o paneles de HMI está disponible el
módulo de ampliación CSM 1277, que es un switch Ethernet/Profinet no gestionado con 4
puertos. En la siguiente tabla podremos observar su diagrama de cableado.
PROCEDIMIENTO.
1. Iniciamos el programa TIA Portal V11, este programa incluye todos los programas
necesarios para realizar la instalación y configuración del controlador.
2. En la pantalla de inicio seleccionar “crear proyecto”, en la parte derecha del programa
llenamos los datos correspondientes al nombre del proyecto, ruta y autor del proyecto,
luego presionar el botón Crear.
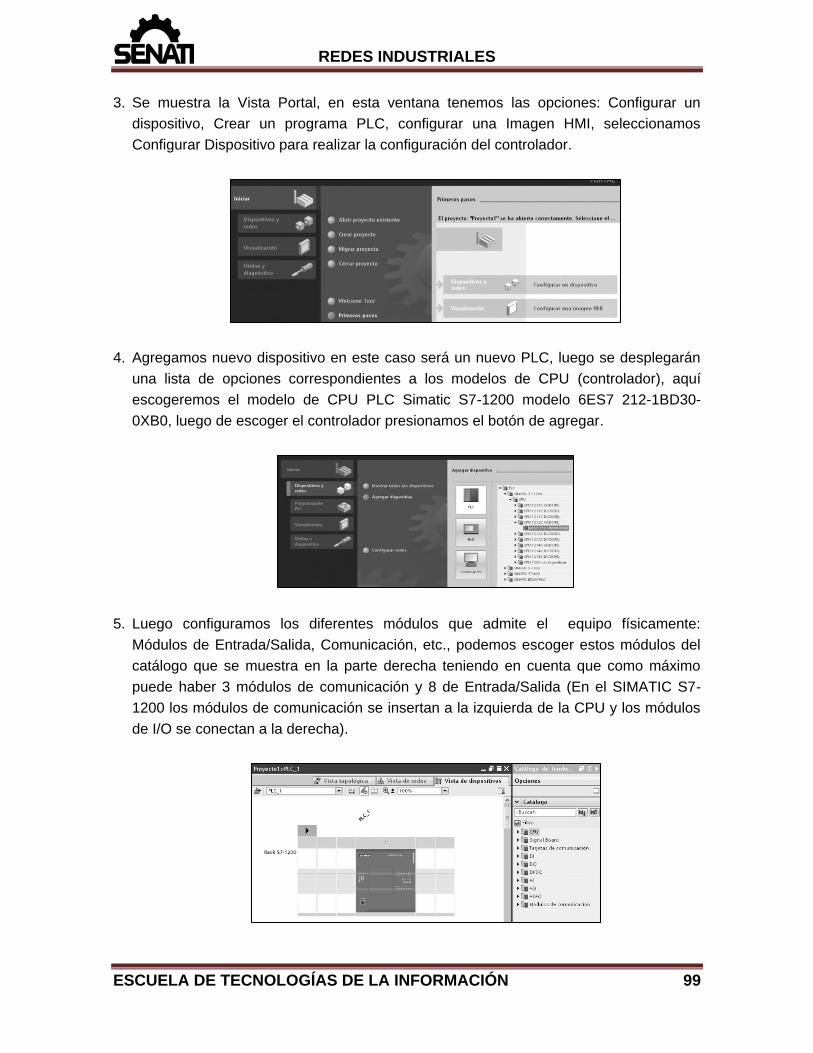
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 99
3. Se muestra la Vista Portal, en esta ventana tenemos las opciones: Configurar un
dispositivo, Crear un programa PLC, configurar una Imagen HMI, seleccionamos
Configurar Dispositivo para realizar la configuración del controlador.
4. Agregamos nuevo dispositivo en este caso será un nuevo PLC, luego se desplegarán
una lista de opciones correspondientes a los modelos de CPU (controlador), aquí
escogeremos el modelo de CPU PLC Simatic S7-1200 modelo 6ES7 212-1BD30-
0XB0, luego de escoger el controlador presionamos el botón de agregar.
5. Luego configuramos los diferentes módulos que admite el equipo físicamente:
Módulos de Entrada/Salida, Comunicación, etc., podemos escoger estos módulos del
catálogo que se muestra en la parte derecha teniendo en cuenta que como máximo
puede haber 3 módulos de comunicación y 8 de Entrada/Salida (En el SIMATIC S7-
1200 los módulos de comunicación se insertan a la izquierda de la CPU y los módulos
de I/O se conectan a la derecha).

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 100
6. Presionando en la parte superior izquierda de la CPU, el programa muestra los slots
para insertar los módulos de comunicación.
7. Para transferir la configuración seleccionamos la CPU y se nos habilita el icono
que es para transferir pero antes de esto comprobaremos la configuración de la
dirección IP del controlador, para configurar el controlador, proceda del siguiente modo:
8. Seleccione la interfaz PROFINET en la representación gráfica del controlador, en la
ventana de inspección que se encuentra en la parte inferior del programa se mostraran
las propiedades de la interfaz PROFINET.
9. En la ventana de Inspección introducimos la dirección IP del controlador en la opción
"Direcciones Ethernet". La dirección IP varía en función a la configuración de red de
cada empresa, para el ejemplo es 192.168.0.1 pero esta puede ser diferente.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 101
10. La ubicación del programa es otro detalle que debemos conoce, el programa de
usuario puede estar formado por uno o varios bloques. Hay que utilizar como mínimo
un bloque de organización, los bloques contienen todas las funciones necesarias para
ejecutar la tarea de automatización específica. Las tareas del programa tienen como
finalidad manipular los datos del proceso (combinación lógica de señales binarias,
lectura, evaluación de señales analógicas y definición de señales binarias para la
salida).
Los bloques de organización (OBs) constituyen la interfaz entre el sistema operativo del
controlador y el programa de usuario, estos bloques son llamados por el sistema operativo
y controlan los procesos (Arranque del sistema, Ejecución del programa, tratamiento de
errores). En un proyecto de automatización debe haber como mínimo un OB de ciclo. El
sistema operativo llama el OB una vez por ciclo, iniciando con ello la ejecución del
programa que contiene. El ciclo vuelve a comenzar cada vez que finaliza la ejecución del
programa
Al insertar un controlador en el proyecto se crea automáticamente un OB de ciclo con el
nombre "Main [OB1]". En este bloque de organización se creará el programa del proyecto.
Para abrir el bloque de organización "Main [OB1]", abrir la carpeta "Bloques de programa"
del árbol del proyecto

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 102
11. Mostraremos cómo cargar el programa en el controlador. Durante el proceso de
carga, se establece una conexión online entre la programadora (PG) o equipo de
programación (PC) y el controlador, al cargar el programa que está guardado en el
disco duro de la computadora (PC) se escribe en la memoria del controlador ( en este
proceso de carga, los bloques incluidos en el programa se compilan). En el TIA Portal
existe la posibilidad de realizar una comparación online/offline de los datos del
proyecto y visualizar las diferencias. El modo online permite detectar, por medio de
los símbolos del árbol del proyecto, si los componentes del programa "offline" en la
PG/el PC son idénticos a los elementos del programa "online" en el controlador. Para
actualizar el estado del programa en el controlador es necesario volver a cargarlo.
12. El TIA Portal mostrara en la ventana de “Carga Avanzada” la interfaz con la que
desee conectar el dispositivo, activar la casilla de verificación "Mostrar dispositivos
accesibles". En "Dispositivos accesibles en la subred de destino" se visualizan todos
los dispositivos accesibles a través de la interfaz seleccionada. Seleccione el
controlador y cargue el programa de usuario.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 103
13. En la ventana de “Vista Preliminar” presionamos el botón Cargar.
14. El TIA Portal nos permite examinar el comportamiento de las entradas y etiquetas del
programa, para realizar esta operación seleccionar en la ventana de propiedades del
controlador la opción “Establecer Comunicación Online”.
15. La comunicación en línea también se puede establecer presionando el botón de la
barra de acceso directo que tiene el mismo nombre: “Establecer Comunicación
Online”.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 104
CAMBIO DE LA DIRECCIÓN IP DE UN CONTROLADOR LÓGICO
PROGRAMABLE AB MICROLOGIX.
En esta actividad vamos a realizar el cambio de la dirección IP del controlador lógico
programable PLC. En algunas ocasiones una dirección IP puede causar conflictos y
afectar el desempeños de un controlador, esta operación se puede realizar desde el
programa RSLogix y podemos estar conectado a través del puerto serie o Ethernet.
PROCEDIMIENTO.
Después de preparar el cable de comunicación de datos para red Ethernet según la
norma TIA-568-B o el cable RS232, procedemos a la instalación del controlador lógico
programable –PLC con la computadora (algunos controladores como el micrologix1400
incluyen ambos modos de comunicación). El proceso de modificación del IP se detalla a
continuación:
1. Instalamos una fuente de 24Vdc, conectamos sus terminales al ingreso de energía del
controlador (si trabajamos con un controlador Micrologix 1100 la fuente viene
integrada), esperamos unos instantes mientras el controlador inicializa, veremos que
se enciende el indicador RUN.
2. Realizamos la conexión con el controlador, esta comunicación puede ser a través del
puerto Serie o Ethernet (recordemos que la conexión Ethernet puede ser establecida
de manera remota).

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 105
3. Verificamos la dirección IP del controlador que vamos a cambiar, en el explorador de la
computadora.
4. El explorador mostrará los datos cargados desde el Firmware del controlador.
5. Luego verificamos que el controlador se encentre en línea con el programa RSLinx.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 106
6. Abrimos el programa RSLogix y buscamos en el árbol de proyecto la opción
Controller, luego seleccionamos la propiedad Open de Channel Configuration.
7. Se abrirá por defecto el Channel 0 que nos indicara las propiedades de la conexión
establecida, en nuestro caso las propiedades que se muestran en la figura
corresponden a una conexión Serie.
8. Seleccionamos Channel 1 que nos mostrara las celdas para modificar los parámetros
relacionados a la configuración en red del controlador, entre ellos: Direccion IP,
Mascara, Puerta de enlace, nombre de Dominio, etc.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 107
9. Insertamos en la celda IP Address la nueva dirección que tendrá el controlador.
10. Cambiaremos el modo de operación del controlador y estableceremos la conexión en
línea.
11. Descargaremos la nueva configuración al controlador, en este caso la nueva
configuración incluye el cambio de dirección IP, el programa en Ladder puede estar
vacío y esto no afectara en nada a la configuración.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 108
12. El programa iniciara el proceso de descarga y mostrara la ventana de revisión en la
que detalla la ruta del programa que descargara (en este caso como se trata de una
prueba con cambio de IP el archivo no tiene nombre).
13. Mientras se descarga el programa el programa RSLogix detectara que la
configuración ha cambiado, presionamos el botón “Apply” para realizar los cambios.
14. Finalmente el programa preguntara si queremos establecer la comunicación en Línea
del controlador, presionamos el botón para aceptar.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 109
15. Ejecutamos el explorador para hacer la comprobación del cambio de dirección del
controlador, ingresamos la nueva dirección 192.168.1.125 y descargaremos el
programa que se encuentra en el Firmware del controlador.
REALIZAR EL CAMBIO DE LA DIRECCIÓN IP DE UN CONTROLADOR
SIEMENS S71200.
En esta actividad vamos a realizar el cambio de IP para un controlador lógico programable
de la marca Siemens modelo S7-1200, este procedimiento es similar al realizado con el
controlador Micrologix, este cambio se realiza con un programa que se instala en la PC
(Workstation), para este modelo especifico de controlador se cuenta con el programa S7-
1200 Tool.
1. Iniciamos el programa S7-1200 Tool, antes de administrar la dirección IP del
controlador el programa requiere la configuración de la interfaz de comunicación que
dispone la estación de trabajo, seleccionamos para esta demostración TCP/IP >
Realtek PCIe FE Family.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 110
2. Luego de configurar la interfaz de comunicación se inicia el programa, observaremos
los datos de la tarjeta de red del equipo y en la parte inferior la actualización de los
dispositivos disponibles en red.
3. Para configurar o modificar la dirección IP o los diferentes parámetros de red del
controlador, se puede cambiar los valores en las celdas ubicadas en la parte derecha
de nuestra selección, presionamos el botón Set y estos nuevos valores se grabaran, si
queremos reiniciar los valores de fábrica del controlador, presionamos el botón Use
Defaults.
4. En la barra de accesos directos podemos encontrar las principales funciones para
administrar las operaciones básicas del controlador: Seleccionar la interface de
comunicación, poner en estado RUN al controlador, Poner en estado STOP al

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 111
controlador y encender las luces del panel del controlador seleccionado (esta
operación es útil cuando tenemos muchos controladores en red).
5. En la barra de menú podemos encontrar las mismas funciones, la opción PG/PC
interface permite seleccionar la interface de comunicación.
6. Finalmente en la opción RUN de la barra de menú permite ejecutar las funciones
básicas del controlador.
FUNDAMENTO TEÓRICO.
Modelo OSI.
Durante las últimas dos décadas ha habido un enorme crecimiento en la cantidad y
tamaño de las redes. Muchas de ellas sin embargo, se desarrollaron utilizando

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 112
implementaciones de hardware y software diferentes. Como resultado, muchas de las
redes eran incompatibles y se volvió muy difícil para las redes que utilizaban
especificaciones distintas poder comunicarse entre sí. Para solucionar este problema, la
Organización Internacional para la Normalización (ISO) realizó varias investigaciones
acerca de los esquemas de red. La ISO reconoció que era necesario crear un modelo de
red que pudiera ayudar a los diseñadores de red a implementar redes que pudieran
comunicarse y trabajar en conjunto (interoperabilidad) y por lo tanto, elaboraron el modelo
de referencia OSI en 1984. En este capítulo, aprenderá cómo el esquema de networking
del modelo de referencia OSI acomoda los estándares de networking. Además, verá cómo
la información o los datos viajan desde los programas de aplicación (como por ejemplo las
hojas de cálculo) a través de un medio de red (como los cables) a otros programas de
aplicación ubicados en otros computadores de la red. A medida que avanza en este
capítulo, aprenderá acerca de las funciones básicas que se producen en cada capa del
modelo OSI, que le servirán de base para empezar a diseñar, desarrollar y diagnosticar
las fallas de las redes.
MODELO GENERAL DE COMUNICACIÓN.
Uso de las capas para analizar problemas en un flujo de materiales. El concepto de
capas le ayudará a comprender la acción que se produce durante el proceso de
comunicación de un computador a otro. En la figura se plantean preguntas que involucran
el movimiento de objetos físicos como por ejemplo, el tráfico de autopistas o los datos
electrónicos. Este desplazamiento de objetos, sea este físico o lógico, se conoce como
flujo. Existen muchas capas que ayudan a describir los detalles del proceso de flujo.
En el cuadro "Comparación de redes". ¿Qué red está examinando? ¿Qué fluye? ¿Cuáles
son las distintas formas del objeto que fluye? ¿Cuáles son las normas para el flujo?
¿Dónde se produce el flujo? Las redes que aparecen en este esquema le ofrecen más
analogías para ayudarlo a comprender las redes informáticas.
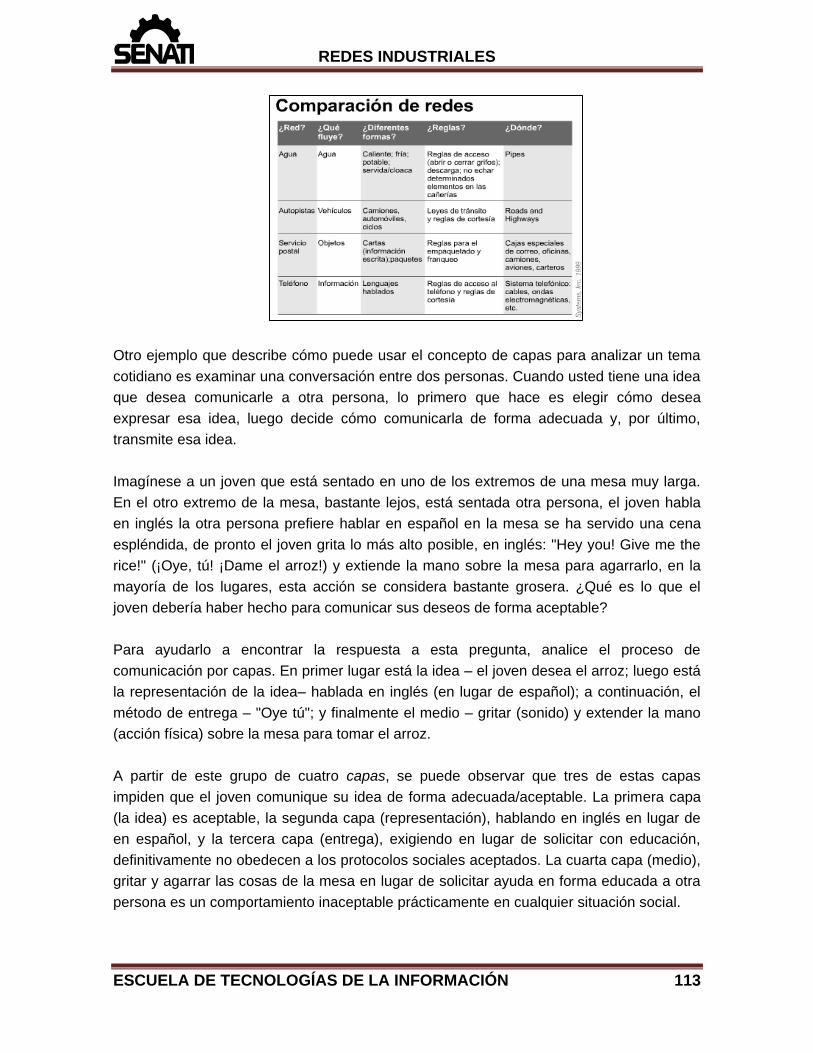
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 113
Otro ejemplo que describe cómo puede usar el concepto de capas para analizar un tema
cotidiano es examinar una conversación entre dos personas. Cuando usted tiene una idea
que desea comunicarle a otra persona, lo primero que hace es elegir cómo desea
expresar esa idea, luego decide cómo comunicarla de forma adecuada y, por último,
transmite esa idea.
Imagínese a un joven que está sentado en uno de los extremos de una mesa muy larga.
En el otro extremo de la mesa, bastante lejos, está sentada otra persona, el joven habla
en inglés la otra persona prefiere hablar en español en la mesa se ha servido una cena
espléndida, de pronto el joven grita lo más alto posible, en inglés: "Hey you! Give me the
rice!" (¡Oye, tú! ¡Dame el arroz!) y extiende la mano sobre la mesa para agarrarlo, en la
mayoría de los lugares, esta acción se considera bastante grosera. ¿Qué es lo que el
joven debería haber hecho para comunicar sus deseos de forma aceptable?
Para ayudarlo a encontrar la respuesta a esta pregunta, analice el proceso de
comunicación por capas. En primer lugar está la idea – el joven desea el arroz; luego está
la representación de la idea– hablada en inglés (en lugar de español); a continuación, el
método de entrega – "Oye tú"; y finalmente el medio – gritar (sonido) y extender la mano
(acción física) sobre la mesa para tomar el arroz.
A partir de este grupo de cuatro capas, se puede observar que tres de estas capas
impiden que el joven comunique su idea de forma adecuada/aceptable. La primera capa
(la idea) es aceptable, la segunda capa (representación), hablando en inglés en lugar de
en español, y la tercera capa (entrega), exigiendo en lugar de solicitar con educación,
definitivamente no obedecen a los protocolos sociales aceptados. La cuarta capa (medio),
gritar y agarrar las cosas de la mesa en lugar de solicitar ayuda en forma educada a otra
persona es un comportamiento inaceptable prácticamente en cualquier situación social.
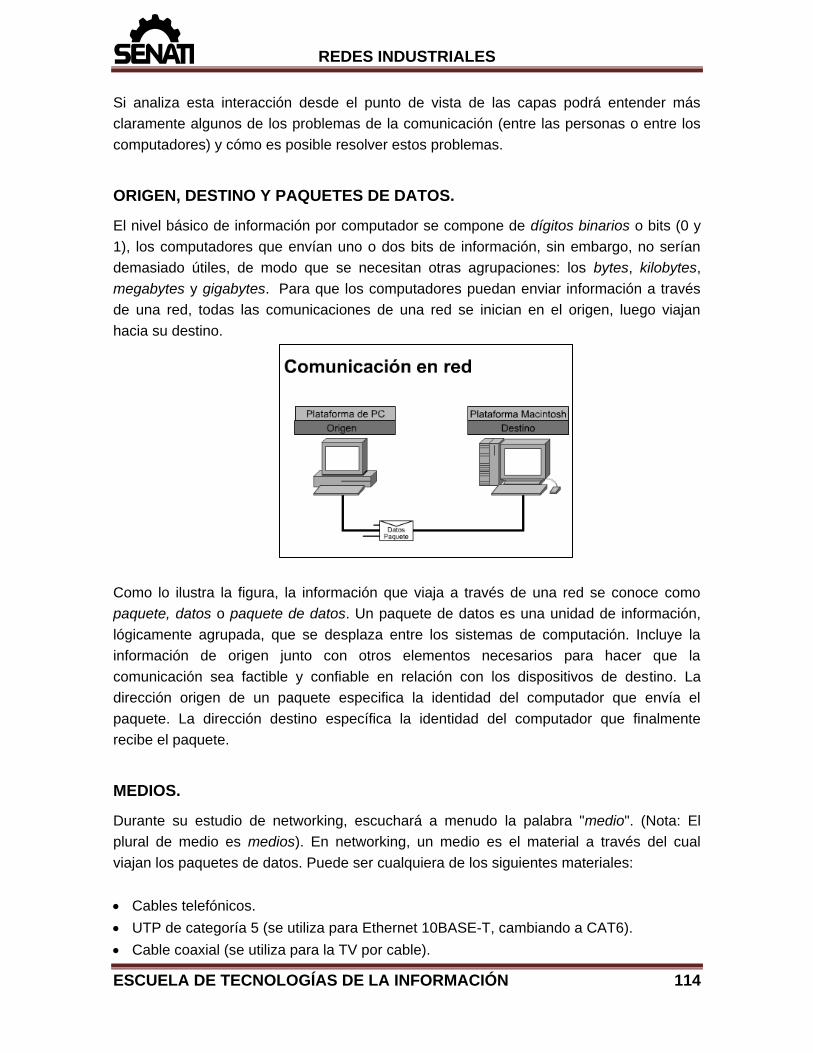
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 114
Si analiza esta interacción desde el punto de vista de las capas podrá entender más
claramente algunos de los problemas de la comunicación (entre las personas o entre los
computadores) y cómo es posible resolver estos problemas.
ORIGEN, DESTINO Y PAQUETES DE DATOS.
El nivel básico de información por computador se compone de dígitos binarios o bits (0 y
1), los computadores que envían uno o dos bits de información, sin embargo, no serían
demasiado útiles, de modo que se necesitan otras agrupaciones: los bytes, kilobytes,
megabytes y gigabytes. Para que los computadores puedan enviar información a través
de una red, todas las comunicaciones de una red se inician en el origen, luego viajan
hacia su destino.
Como lo ilustra la figura, la información que viaja a través de una red se conoce como
paquete, datos o paquete de datos. Un paquete de datos es una unidad de información,
lógicamente agrupada, que se desplaza entre los sistemas de computación. Incluye la
información de origen junto con otros elementos necesarios para hacer que la
comunicación sea factible y confiable en relación con los dispositivos de destino. La
dirección origen de un paquete especifica la identidad del computador que envía el
paquete. La dirección destino específica la identidad del computador que finalmente
recibe el paquete.
MEDIOS.
Durante su estudio de networking, escuchará a menudo la palabra "medio". (Nota: El
plural de medio es medios). En networking, un medio es el material a través del cual
viajan los paquetes de datos. Puede ser cualquiera de los siguientes materiales:
Cables telefónicos.
UTP de categoría 5 (se utiliza para Ethernet 10BASE-T, cambiando a CAT6).
Cable coaxial (se utiliza para la TV por cable).

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 115
Fibra óptica (delgadas fibras de vidrio que transportan luz).
Existen otros dos tipos de medios que son menos evidentes, pero que no obstante se
deben tener en cuenta en la comunicación por redes. En primer lugar, está la atmósfera
(en su mayor parte formada por oxígeno, nitrógeno y agua) que transporta ondas de radio,
microondas y luz. La comunicación sin ningún tipo de alambres o cables se denomina
inalámbrica o comunicación de espacio abierto. Esto es posible utilizando ondas
electromagnéticas (EM). Entre las ondas EM, que en el vacío viajan a velocidad de la luz,
se incluyen las ondas de energía, ondas de radio, microondas, luz infrarroja, luz visible,
luz ultravioleta, rayos x y rayos gama. Las ondas EM viajan a través de la atmósfera
(principalmente compuesta de oxígeno, nitrógeno y agua), pero también viajan a través
del vacío del espacio exterior (donde no existe prácticamente materia, ni moléculas ni
átomos). En las siguientes figuras se mostrara los principales medios para la
comunicación por redes:
Cable coaxial 10BASE2 de 50 Ohms
Cable Thicknet10BASE5
Cable UTP

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 116
Cable de fibra Óptica
PROTOCOLO.
Para que los paquetes de datos puedan viajar desde el origen hasta su destino a través
de una red, es importante que todos los dispositivos de la red hablen el mismo lenguaje o
protocolo. Un protocolo es un conjunto de reglas que hacen que la comunicación en una
red sea más eficiente, se muestra algunos ejemplos:
En el Congreso se hace posible que cientos de representantes que desean expresar
sus opiniones lo hagan por turnos y que transmitan sus ideas de forma ordenada.
Mientras se está conduciendo un auto, otros autos envían señales de tipo luminoso
cuando desean girar; si no lo hicieran, las rutas serían un caos.
Al volar un avión, los pilotos obedecen reglas muy específicas para poder comunicarse
con otros aviones y con el control de tráfico aéreo.
La definición técnica de un protocolo de comunicaciones de datos es: un conjunto de
normas, o un acuerdo, que determina el formato y la transmisión de datos. La capa n de
un computador se comunica con la capa n de otro computador. Las normas y
convenciones que se utilizan en esta comunicación se denominan colectivamente
protocolo de la capa n.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 117
EVOLUCIÓN DE LAS NORMAS DE NETWORKING DE ISO.
Al principio de su desarrollo, las LAN, MAN y WAN eran en cierto modo caóticas. A
principios de la década de los 80 se produjo un enorme crecimiento en la cantidad y el
tamaño de las redes. A medida que las empresas se dieron cuenta de que podrían
ahorrar mucho dinero y aumentar la productividad con la tecnología de networking,
comenzaron a agregar redes y a expandir las redes existentes casi simultáneamente con
la aparición de nuevas tecnologías y productos de red. A mediados de los 80, estas
empresas debieron enfrentar problemas cada vez más serios debido a su expansión
caótica, resultaba cada vez más difícil que las redes que usaban diferentes
especificaciones pudieran comunicarse entre sí. Se dieron cuenta que necesitaban salir
de los sistemas de networking propietarios.
Los sistemas propietarios se desarrollan, pertenecen y son controlados por
organizaciones privadas. En la industria de la informática, "propietario" es lo contrario de
"abierto". "Propietario" significa que un pequeño grupo de empresas controla el uso total
de la tecnología. Abierto significa que el uso libre de la tecnología está disponible para
todos. Para enfrentar el problema de incompatibilidad de las redes y su imposibilidad de
comunicarse entre sí, la Organización Internacional para la Normalización (ISO) estudió
esquemas de red como DECNET, SNA y TCP/IP a fin de encontrar un conjunto de reglas,
como resultado de esta investigación, la ISO desarrolló un modelo de red que ayudaría a
los fabricantes a crear redes que fueran compatibles y que pudieran operar con otras
redes.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 118
El proceso de dividir comunicaciones complejas en tareas más pequeñas y separadas se
podría comparar con el proceso de construcción de un automóvil, visto globalmente, el
diseño, la fabricación y el ensamblaje de un automóvil es un proceso de gran
complejidad. Es poco probable que una sola persona sepa cómo realizar todas las tareas
requeridas para la construcción de un automóvil desde cero. Es por ello que los
ingenieros mecánicos diseñan el automóvil, los ingenieros de fabricación diseñan los
moldes para fabricar las partes y los técnicos de ensamblaje ensamblan cada uno una
parte del auto.
El modelo de referencia OSI (Nota: No debe confundirse con ISO.), lanzado en 1984, fue
el esquema descriptivo que crearon. Este modelo proporcionó a los fabricantes un
conjunto de estándares que aseguraron una mayor compatibilidad e interoperabilidad
entre los distintos tipos de tecnología de red utilizados por las empresas a nivel mundial.
EL MODELO DE REFERENCIA OSI.
El modelo de referencia OSI es el modelo principal para las comunicaciones por red,
aunque existen otros modelos, en la actualidad la mayoría de los fabricantes de redes
relacionan sus productos con el modelo de referencia OSI, especialmente cuando desean
enseñar a los usuarios cómo utilizar sus productos. Los fabricantes consideran que es la
mejor herramienta disponible para enseñar cómo enviar y recibir datos a través de una
red.
El modelo de referencia OSI permite que los usuarios vean las funciones de red que se
producen en cada capa, más importante aún, el modelo de referencia OSI es un marco
que se puede utilizar para comprender cómo viaja la información a través de una red.
Además, puede usar el modelo de referencia OSI para visualizar cómo la información o
los paquetes de datos viajan desde los programas de aplicación (por ej., hojas de cálculo,
documentos, etc.), a través de un medio de red (por ej., cables, etc.), hasta otro programa
de aplicación ubicado en otro computador de la red, aun cuando el transmisor y el
receptor tengan distintos tipos de medios de red.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 119
En el modelo de referencia OSI, hay siete capas numeradas, cada una de las cuales
ilustra una función de red específica. Esta división de las funciones de networking se
denomina división en capas. Si la red se divide en estas siete capas, se obtienen las
siguientes ventajas:
Divide la comunicación de red en partes más pequeñas y sencillas.
Normaliza los componentes de red para permitir el desarrollo y el soporte de los
productos de diferentes fabricantes.
Permite a los distintos tipos de hardware y software de red comunicarse entre sí.
Impide que los cambios en una capa puedan afectar las demás capas, para que se
puedan desarrollar con más rapidez.
Divide la comunicación de red en partes más pequeñas para simplificar el aprendizaje.
CAPAS DEL MODELO DE REFERENCIA OSI.
El problema de trasladar información entre computadores se divide en siete problemas
más pequeños y de tratamiento más simple en el modelo de referencia OSI. Cada uno de
los siete problemas más pequeños está representado por su propia capa en el modelo.
Las siete capas del modelo de referencia OSI son:
Capa 7: La capa de aplicación.
Capa 6: La capa de presentación.
Capa 5: La capa de sesión.
Capa 4: La capa de transporte.
Capa 3: La capa de red.
Capa 2: La capa de enlace de datos.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 120
Capa 1: La capa física.
Al estudiar una por una las capas del modelo de referencia OSI, comprenderá de qué
manera los paquetes de datos viajan a través de una red y qué dispositivos operan en
cada capa a medida que los paquetes de datos las atraviesan. Como resultado,
comprenderá cómo diagnosticar las fallas cuando se presenten problemas de red,
especialmente durante el flujo de paquetes de datos.
Cada capa individual del modelo OSI tiene un conjunto de funciones que debe realizar
para que los paquetes de datos puedan viajar en la red desde el origen hasta el destino. A
continuación, presentamos una breve descripción de cada capa del modelo de referencia
OSI tal como aparece en la figura.
Capa 7: La capa de aplicación La capa de aplicación es la capa del modelo OSI más
cercana al usuario; suministra servicios de red a las aplicaciones del usuario. Difiere de
las demás capas debido a que no proporciona servicios a ninguna otra capa OSI, sino
solamente a aplicaciones que se encuentran fuera del modelo OSI. Algunos ejemplos
de aplicaciones son los programas de hojas de cálculo, de procesamiento de texto y
los de las terminales bancarias. La capa de aplicación establece la disponibilidad de los
potenciales socios de comunicación, sincroniza y establece acuerdos sobre los
procedimientos de recuperación de errores y control de la integridad de los datos. Si
desea recordar a la Capa 7 en la menor cantidad de palabras posible, piense en los
navegadores de Web.
Capa 6: La capa de presentación La capa de presentación garantiza que la información
que envía la capa de aplicación de un sistema pueda ser leída por la capa de
aplicación de otro. De ser necesario, la capa de presentación traduce entre varios

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 121
formatos de datos utilizando un formato común. Si desea recordar la Capa 6 en la
menor cantidad de palabras posible, piense en un formato de datos común.
Capa 5: La capa de sesión Como su nombre lo implica, la capa de sesión establece,
administra y finaliza las sesiones entre dos hosts que se están comunicando. La capa
de sesión proporciona sus servicios a la capa de presentación. También sincroniza el
diálogo entre las capas de presentación de los dos hosts y administra su intercambio
de datos. Además de regular la sesión, la capa de sesión ofrece disposiciones para
una eficiente transferencia de datos, clase de servicio y un registro de excepciones
acerca de los problemas de la capa de sesión, presentación y aplicación. Si desea
recordar la Capa 5 en la menor cantidad de palabras posible, piense en diálogos y
conversaciones.
Capa 4: La capa de transporte La capa de transporte segmenta los datos originados en
el host emisor y los reensambla en una corriente de datos dentro del sistema del host
receptor. El límite entre la capa de transporte y la capa de sesión puede imaginarse
como el límite entre los protocolos de aplicación y los protocolos de flujo de datos.
Mientras que las capas de aplicación, presentación y sesión están relacionadas con
asuntos de aplicaciones, las cuatro capas inferiores se encargan del transporte de
datos.
La capa de transporte intenta suministrar un servicio de transporte de datos que aísla
las capas superiores de los detalles de implementación del transporte.
Específicamente, temas como la confiabilidad del transporte entre dos hosts es
responsabilidad de la capa de transporte. Al proporcionar un servicio de
comunicaciones, la capa de transporte establece, mantiene y termina adecuadamente
los circuitos virtuales. Al proporcionar un servicio confiable, se utilizan dispositivos de
detección y recuperación de errores de transporte. Si desea recordar a la Capa 4 en la
menor cantidad de palabras posible, piense en calidad de servicio y confiabilidad.
Capa 3: La capa de red La capa de red es una capa compleja que proporciona
conectividad y selección de ruta entre dos sistemas de hosts que pueden estar
ubicados en redes geográficamente distintas. Si desea recordar la Capa 3 en la menor
cantidad de palabras posible, piense en selección de ruta, direccionamiento y
enrutamiento.
Capa 2: La capa de enlace de datos La capa de enlace de datos proporciona tránsito
de datos confiable a través de un enlace físico. Al hacerlo, la capa de enlace de datos
se ocupa del direccionamiento físico (comparado con el lógico) , la topología de red, el
acceso a la red, la notificación de errores, entrega ordenada de tramas y control de
flujo. Si desea recordar la Capa 2 en la menor cantidad de palabras posible, piense en
tramas y control de acceso al medio.
Capa 1: La capa física La capa física define las especificaciones eléctricas, mecánicas,
de procedimiento y funcionales para activar, mantener y desactivar el enlace físico
entre sistemas finales. Las características tales como niveles de voltaje, temporización
de cambios de voltaje, velocidad de datos físicos, distancias de transmisión máximas,

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 122
conectores físicos y otros atributos similares son definidos por las especificaciones de
la capa física. Si desea recordar la Capa 1 en la menor cantidad de palabras posible,
piense en señales y medios.
ENCAPSULAMIENTO.
Todas las comunicaciones de una red parten de un origen y se envían a un destino, y que
la información que se envía a través de una red se denomina datos o paquete de datos. Si
un computador (host A) desea enviar datos a otro (host B), en primer término los datos
deben empaquetarse a través de un proceso denominado encapsulamiento.
El encapsulamiento rodea los datos con la información de protocolo necesaria antes de
que se una al tránsito de la red. Por lo tanto, a medida que los datos se desplazan a
través de las capas del modelo OSI, reciben encabezados, información final y otros tipos
de información. (Nota: La palabra "encabezado" significa que se ha agregado la
información correspondiente a la dirección).

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 123
Para ver cómo se produce el encapsulamiento, examine la forma en que los datos viajan
a través de las capas como lo ilustra la siguiente figura. Una vez que se envían los datos
desde el origen, como se describe en la siguiente figura, viajan a través de la capa de
aplicación y recorren todas las demás capas en sentido descendiente. Como puede ver,
el empaquetamiento y el flujo de los datos que se intercambian experimentan cambios a
medida que las redes ofrecen sus servicios a los usuarios finales. Como lo muestran las
figuras, las redes deben realizar los siguientes cinco pasos de conversión a fin de
encapsular los datos:
Crear los datos. Cuando un usuario envía un mensaje de correo electrónico, sus
caracteres alfanuméricos se convierten en datos que pueden recorrer la internetwork.
Empaquetar los datos para ser transportados de extremo a extremo. Los datos se
empaquetan para ser transportados por la internetwork. Al utilizar segmentos, la
función de transporte asegura que los hosts del mensaje en ambos extremos del
sistema de correo electrónico se puedan comunicar de forma confiable.
Anexar (agregar) la dirección de red al encabezado. Los datos se colocan en un
paquete o datagrama que contiene el encabezado de red con las direcciones lógicas
de origen y de destino. Estas direcciones ayudan a los dispositivos de red a enviar los
paquetes a través de la red por una ruta seleccionada.
Anexar (agregar) la dirección local al encabezado de enlace de datos. Cada dispositivo
de la red debe poner el paquete dentro de una trama. La trama le permite conectarse al
próximo dispositivo de red conectado directamente en el enlace. Cada dispositivo en la
ruta de red seleccionada requiere el entramado para poder conectarse al siguiente
dispositivo.
Realizar la conversión a bits para su transmisión. La trama debe convertirse en un
patrón de unos y ceros (bits) para su transmisión a través del medio (por lo general un
cable). Una función de temporización permite que los dispositivos distingan estos bits a
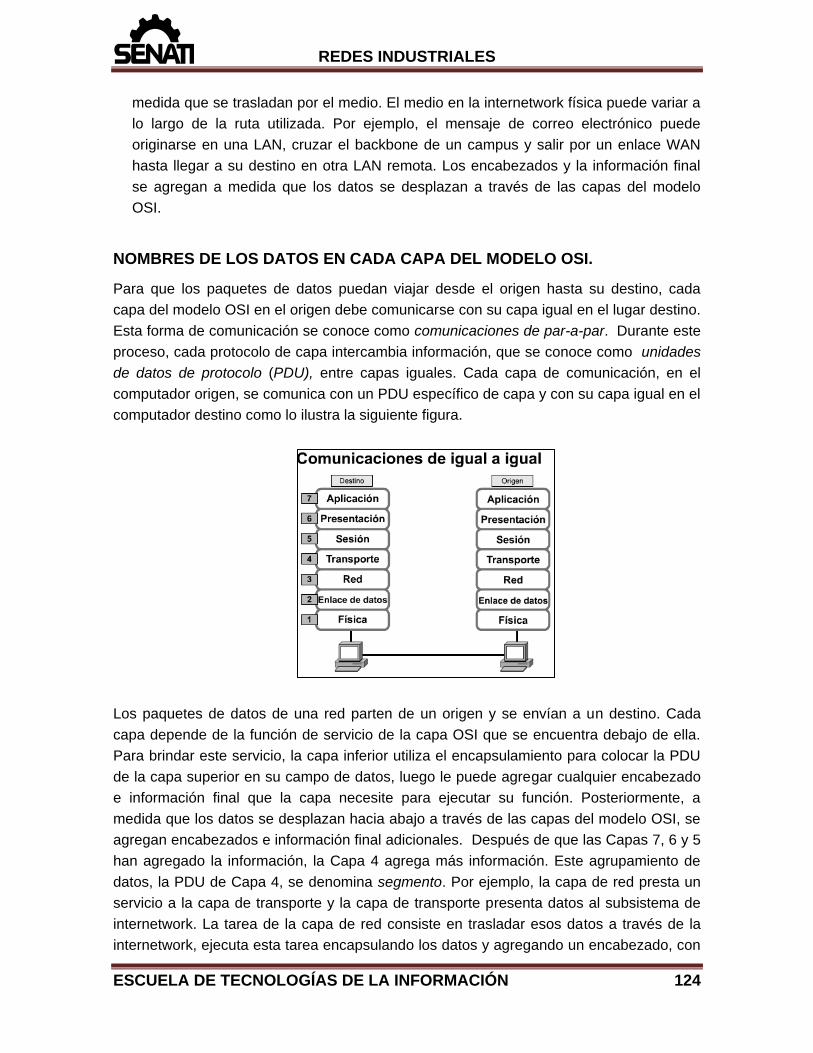
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 124
medida que se trasladan por el medio. El medio en la internetwork física puede variar a
lo largo de la ruta utilizada. Por ejemplo, el mensaje de correo electrónico puede
originarse en una LAN, cruzar el backbone de un campus y salir por un enlace WAN
hasta llegar a su destino en otra LAN remota. Los encabezados y la información final
se agregan a medida que los datos se desplazan a través de las capas del modelo
OSI.
NOMBRES DE LOS DATOS EN CADA CAPA DEL MODELO OSI.
Para que los paquetes de datos puedan viajar desde el origen hasta su destino, cada
capa del modelo OSI en el origen debe comunicarse con su capa igual en el lugar destino.
Esta forma de comunicación se conoce como comunicaciones de par-a-par. Durante este
proceso, cada protocolo de capa intercambia información, que se conoce como unidades
de datos de protocolo (PDU), entre capas iguales. Cada capa de comunicación, en el
computador origen, se comunica con un PDU específico de capa y con su capa igual en el
computador destino como lo ilustra la siguiente figura.
Los paquetes de datos de una red parten de un origen y se envían a un destino. Cada
capa depende de la función de servicio de la capa OSI que se encuentra debajo de ella.
Para brindar este servicio, la capa inferior utiliza el encapsulamiento para colocar la PDU
de la capa superior en su campo de datos, luego le puede agregar cualquier encabezado
e información final que la capa necesite para ejecutar su función. Posteriormente, a
medida que los datos se desplazan hacia abajo a través de las capas del modelo OSI, se
agregan encabezados e información final adicionales. Después de que las Capas 7, 6 y 5
han agregado la información, la Capa 4 agrega más información. Este agrupamiento de
datos, la PDU de Capa 4, se denomina segmento. Por ejemplo, la capa de red presta un
servicio a la capa de transporte y la capa de transporte presenta datos al subsistema de
internetwork. La tarea de la capa de red consiste en trasladar esos datos a través de la
internetwork, ejecuta esta tarea encapsulando los datos y agregando un encabezado, con
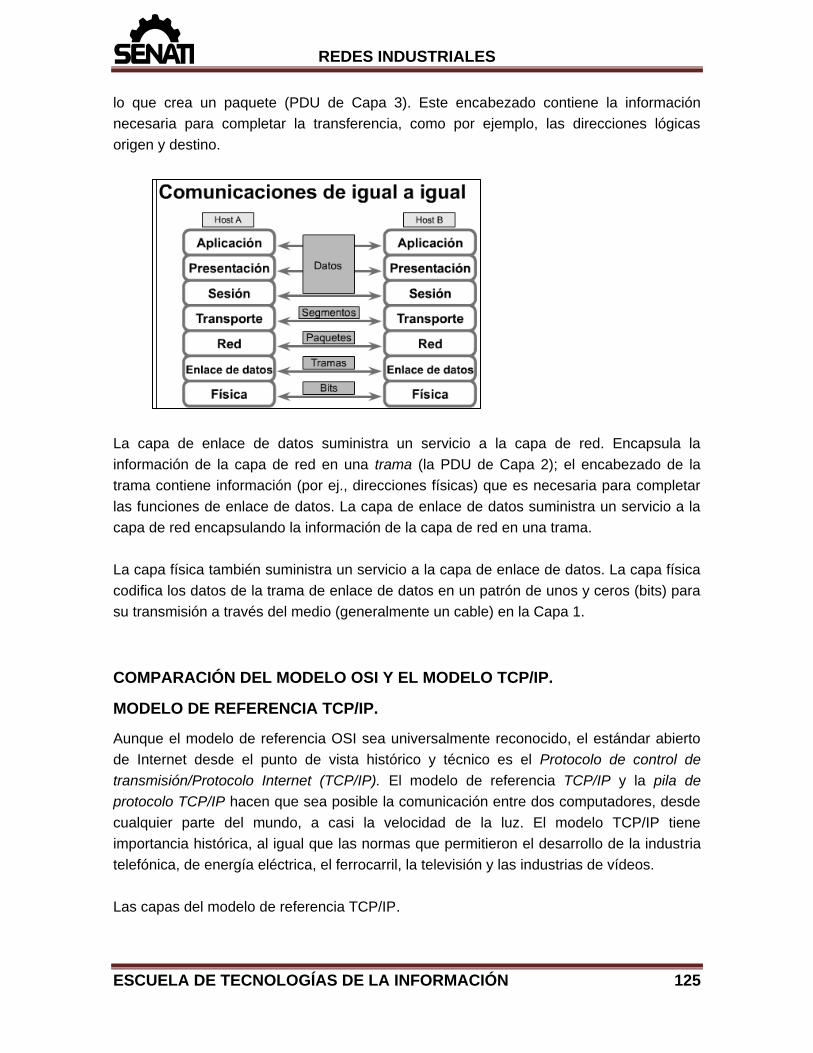
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 125
lo que crea un paquete (PDU de Capa 3). Este encabezado contiene la información
necesaria para completar la transferencia, como por ejemplo, las direcciones lógicas
origen y destino.
La capa de enlace de datos suministra un servicio a la capa de red. Encapsula la
información de la capa de red en una trama (la PDU de Capa 2); el encabezado de la
trama contiene información (por ej., direcciones físicas) que es necesaria para completar
las funciones de enlace de datos. La capa de enlace de datos suministra un servicio a la
capa de red encapsulando la información de la capa de red en una trama.
La capa física también suministra un servicio a la capa de enlace de datos. La capa física
codifica los datos de la trama de enlace de datos en un patrón de unos y ceros (bits) para
su transmisión a través del medio (generalmente un cable) en la Capa 1.
COMPARACIÓN DEL MODELO OSI Y EL MODELO TCP/IP.
MODELO DE REFERENCIA TCP/IP.
Aunque el modelo de referencia OSI sea universalmente reconocido, el estándar abierto
de Internet desde el punto de vista histórico y técnico es el Protocolo de control de
transmisión/Protocolo Internet (TCP/IP). El modelo de referencia TCP/IP y la pila de
protocolo TCP/IP hacen que sea posible la comunicación entre dos computadores, desde
cualquier parte del mundo, a casi la velocidad de la luz. El modelo TCP/IP tiene
importancia histórica, al igual que las normas que permitieron el desarrollo de la industria
telefónica, de energía eléctrica, el ferrocarril, la televisión y las industrias de vídeos.
Las capas del modelo de referencia TCP/IP.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 126
El Departamento de Defensa de EE.UU. (DoD) creó el modelo TCP/IP porque necesitaba
una red que pudiera sobrevivir ante cualquier circunstancia, incluso una guerra nuclear.
Para brindar un ejemplo más amplio, supongamos que el mundo está en estado de
guerra, atravesado en todas direcciones por distintos tipos de conexiones: cables,
microondas, fibras ópticas y enlaces satelitales. Imaginemos entonces que se necesita
que fluya la información o los datos (organizados en forma de paquetes),
independientemente de la condición de cualquier nodo o red en particular de la
internetwork (que en este caso podrían haber sido destruidos por la guerra). El DoD
desea que sus paquetes lleguen a destino siempre, bajo cualquier condición, desde un
punto determinado hasta cualquier otro. Este problema de diseño de difícil solución fue lo
que llevó a la creación del modelo TCP/IP, que desde entonces se transformó en el
estándar a partir del cual se desarrolló Internet.
A medida que obtenga más información acerca de las capas, tenga en cuenta el propósito
original de Internet; esto le ayudará a entender por qué motivo ciertas cosas son como
son. El modelo TCP/IP tiene cuatro capas: la capa de aplicación, la capa de transporte, la
capa de Internety la capa de acceso de red. Es importante observar que algunas de las
capas del modelo TCP/IP poseen el mismo nombre que las capas del modelo OSI. No
confunda las capas de los dos modelos, porque la capa de aplicación tiene diferentes
funciones en cada modelo.
Capa de aplicación Los diseñadores de TCP/IP sintieron que los protocolos de nivel
superior deberían incluir los detalles de las capas de sesión y presentación.
Simplemente crearon una capa de aplicación que maneja protocolos de alto nivel,
aspectos de representación, codificación y control de diálogo. El modelo TCP/IP
combina todos los aspectos relacionados con las aplicaciones en una sola capa y
garantiza que estos datos estén correctamente empaquetados para la siguiente capa.
Capa de transporte La capa de transporte se refiere a los aspectos de calidad del
servicio con respecto a la confiabilidad, el control de flujo y la corrección de errores.
Uno de sus protocolos, el protocolo para el control de la transmisión (TCP), ofrece

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 127
maneras flexibles y de alta calidad para crear comunicaciones de red confiables, sin
problemas de flujo y con un nivel de error bajo. TCP es un protocolo orientado a la
conexión. Mantiene un diálogo entre el origen y el destino mientras empaqueta la
información de la capa de aplicación en unidades denominadas segmentos. Orientado
a la conexión no significa que el circuito exista entre los computadores que se están
comunicando (esto sería una conmutación de circuito). Significa que los segmentos de
Capa 4 viajan de un lado a otro entre dos hosts para comprobar que la conexión exista
lógicamente para un determinado período. Esto se conoce como conmutación de
paquetes.
Capa de Internet El propósito de la capa de Internet es enviar paquetes origen desde
cualquier red en la internetwork y que estos paquetes lleguen a su destino
independientemente de la ruta y de las redes que recorrieron para llegar hasta allí. El
protocolo específico que rige esta capa se denomina Protocolo Internet (IP). En esta
capa se produce la determinación de la mejor ruta y la conmutación de paquetes. Esto
se puede comparar con el sistema postal. Cuando envía una carta por correo, usted no
sabe cómo llega a destino (existen varias rutas posibles); lo que le interesa es que la
carta llegue
Capa de acceso de red El nombre de esta capa es muy amplio y se presta a
confusión. También se denomina capa de host a red. Es la capa que se ocupa de
todos los aspectos que requiere un paquete IP para realizar realmente un enlace físico
y luego realizar otro enlace físico. Esta capa incluye los detalles de tecnología LAN y
WAN y todos los detalles de las capas físicas y de enlace de datos del modelo OSI.
COMPARACIÓN ENTRE EL MODELO OSI Y EL MODELO TCP/IP.
Similitudes:
Ambos se dividen en capas.
Ambos tienen capas de aplicación, aunque incluyen servicios muy distintos.
Ambos tienen capas de transporte y de red similares.
Se supone que la tecnología es de conmutación por paquetes (no de conmutación por
circuito).
Los profesionales de networking deben conocer ambos.
Diferencias:
TCP/IP combina las funciones de la capa de presentación y de sesión en la capa de
aplicación.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 128
TCP/IP combina la capa de enlace de datos y la capa física del modelo OSI en una
sola capa.
TCP/IP parece ser más simple porque tiene menos capas.
Los protocolos TCP/IP son los estándares en torno a los cuales se desarrolló la
Internet, de modo que la credibilidad del modelo TCP/IP se debe en gran parte a sus
protocolos. En comparación, las redes típicas no se desarrollan normalmente a partir
del protocolo OSI, aunque el modelo OSI se usa como guía.
USO DE LOS MODELOS OSI Y TCP/IP.
Aunque los protocolos TCP/IP representan los estándares en base a los cuales se ha
desarrollado la Internet, utilizamos el modelo OSI por los siguientes motivos:
Es un estándar mundial, genérico, independiente de los protocolos.
Es más detallado, lo que hace que sea más útil para la enseñanza y el aprendizaje.
Al ser más detallado, resulta de mayor utilidad para el diagnóstico de fallas.
Muchos profesionales de networking tienen distintas opiniones con respecto al modelo
que se debe usar, existe una diferencia entre un modelo (es decir, capas, interfaces y
especificaciones de protocolo) y el protocolo real que se usa en networking. Usted usará
el modelo OSI y los protocolos TCP/IP.
Se concentrará en TCP como un protocolo de Capa 4 de OSI, IP como un protocolo de
Capa 3 de OSI y Ethernet como una tecnología de las Capas 2 y 1. El diagrama de la
figura indica que posteriormente durante el curso se examinará una tecnología de la capa
de enlace de datos y de la capa física en particular entre las diversas opciones
disponibles: esta tecnología será Ethernet.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 129
RED INDUSTRIAL.
Las redes de comunicaciones industriales deben su origen a la fundación FieldBus
(Redes de campo). La fundación FieldBus, desarrollo un nuevo protocolo de
comunicación, para la medición y control de procesos donde todos los instrumentos
puedan comunicarse en una misma plataforma.
Las comunicaciones entre los instrumentos de proceso y el sistema de control se basan
principalmente en señales analógicas (neumáticas de 3 a 15 psi en las válvulas de control
y electrónicas de 4 a 20 mA cc). Pero ya existen instrumentos digitales capaces de
manejar gran cantidad de datos y guardarlos históricamente; su precisión es diez veces
mayor que la de la señal típica de 4-20 mA cc. En vez de transmitir cada variable por un
par de hilos, transmiten secuencialmente las variables por medio de un cable de
comunicaciones llamado bus.
La tecnología fieldbus (bus de campo) es un protocolo de comunicaciones digital de alta
velocidad que está creada para remplazar la clásica señal de 4-20 mA que aún se utiliza
en muchos de los sistemas DCS (Sistema de Control Distribuido) y PLC (Controladores
Lógicos Programables), instrumentos de medida y transmisión y válvulas de control. La
arquitectura fieldbus conecta estos instrumentos con computadores que se usan en
diferentes niveles de coordinación y dirección de la planta. Muchos de los protocolos
patentados para dichas aplicaciones tiene una limitante y es que el fabricante no permite
al usuario final la interoperabilidad de instrumentos, es decir, no es posible intercambiar
los instrumentos de un fabricante por otro similar. Es claro que estas tecnologías cerradas
tienden a desaparecer ya que actualmente es necesaria la interoperabilidad de sistemas y
aparatos y así tener la capacidad de manejar sistemas abiertos y estandarizados. Con el
mejoramiento de los protocolos de comunicación es ahora posible reducir el tiempo
necesitado para la transferencia de datos, asegurando la misma, garantizando el tiempo
de sincronización y el tiempo real de respuesta determinística en algunas aplicaciones.
TECNOLOGÍA DE BUSES DE CAMPO.
Físicamente podemos considerar a un bus como un conjunto de conductores conectando
conjuntamente más circuitos para permitir el intercambio de datos. Contrario a una
conexión punto a punto donde solo dos dispositivos intercambian información, un bus
consta normalmente de un número de usuarios superior, además que generalmente un
bus transmite datos en modo serial, a excepción de algún protocolo de bus particular
como SCSI, o IEEE-488 utilizado para interconexión de instrumentos de medición, que no
es el caso de los buses tratados como buses de campo. Para una transmisión serial es
suficiente un número de cables muy limitado, generalmente son suficientes dos o tres
conductores y la debida protección contra las perturbaciones externas para permitir su
tendido en ambientes de ruido industrial.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 130
Ventajas de un bus de campo:
El intercambio puede llevar a cabo por medio de un mecanismo estándar.
Flexibilidad de extensión. - Conexión de módulos diferentes en una misma línea.
Posibilidad de conexión de dispositivos de diferentes procedencias.
Distancias operativas superiores al cableado tradicional. - Reducción masiva de cables
y costo asociado.
Simplificación de la puesta en servicio.
Desventajas de un bus de campo:
Necesidad de conocimientos superiores.
Inversión de instrumentación y accesorios de diagnóstico.
Costos globales inicialmente superiores.
Procesos de comunicación por medio de bus.
El modo más sencillo de comunicación con el bus es el sondeo cliente/servidor.
Más eficiente pero también más costoso es el Token bus (IEEE 802.4), desde el punto de
vista físico tenemos un bus lineal, desde el punto de vista lógico un token ring. El
procedimiento token passing es una combinación entre cliente/servidor y token bus. Todo
servidor inteligente puede ser en algún momento servidor.
TIPOS DE BUS.
La mayoría de los buses trabajan en el nivel 1 con interfaz RS 485.
ASI (Actuator Sensor Interface). Es el bus más inmediato en el nivel de campo y más
sencillo de controlar, consiste en un bus cliente/servidor con un máximo de 31
participantes, transmite por paquetes de solo 4 bits de dato. Es muy veloz, con un ciclo
de 5 ms aproximadamente. Alcanza distancias de máximo 100 m.
BITBUS. Es el más difundido en todo el mundo, es cliente/servidor que admite como
máximo 56 clientes, el paquete puede transmitir hasta 43 bytes de dato.
PROFIBUS (PROcess FIeld BUS). Es el estándar europeo en tecnología de buses, se
encuentra jerárquicamente por encima de ASI y BITBUS, trabaja según procedimiento
híbrido token passing, dispone de 31 participantes hasta un máximo de 127. Su
paquete puede transmitir un máximo de 246 Bytes, y el ciclo para 31participantes es de
aproximadamente 90 ms. Alcanza una distancia de hasta 22300 m.
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 131
FieldBus en OSI. En la arquitectura OSI, fieldbus ocupa los niveles 1 (Físico), 2
(Enlace de Datos) y 7 (Aplicación); teniendo en cuenta que este último no solo se
encarga de la interfaz de usuario sino de aplicaciones específicas dependiendo de
cada aplicación.
CLASIFICACIÓN DE LAS REDES INDUSTRIALES.
Si se clasifican las redes industriales en diferentes categorías basándose en la
funcionalidad, se hará en:
Buses Actuadores y Sensores. Inicialmente es usado un sensor y un bus actuador
en conexión simple, dispositivos discretos con inteligencia limitada, como una foto
sensor, un switch limitador o una válvula solenoide, controladores y consolas
terminales.
Buses de Campo y Dispositivos. Estas redes se distinguen por la forma como
manejan el tamaño del mensaje y el tiempo de respuesta. En general estas redes
conectan dispositivos inteligentes en una sola red distribuida (Delta V de Emmerson).
Estas redes ofrecen altos niveles de diagnóstico y capacidad de configuración,
generalmente al nivel del poder de procesamiento de los dispositivos más inteligentes.
Son las redes más sofisticadas que trabajan con control distribuido real entre
dispositivos inteligentes, tal es el caso de FIELDBUS FOUNDATION.
COMPONENTES DE LAS REDES INDUSTRIALES.
En grandes redes industriales un simple cable no es suficiente para conectar el conjunto
de todos los nodos de la red. Deben definirse topologías y diseños de redes para proveer
un aislamiento y conocer los requerimientos de funcionamiento.
Bridge. Con un puente la conexión entre dos diferentes secciones de red, puede tener
diferentes características eléctricas y protocolos; además puede enlazar dos redes
diferentes.
Repetidor. El repetidor o amplificador es un dispositivo que intensifica las señales
eléctricas para que puedan viajar grandes distancias entre nodos. Con este dispositivo
se pueden conectar un gran número de nodos a la red; además se pueden adaptar a
diferentes medios físicos como cable coaxial o fibra óptica.
Gateway. Un gateway es similar a un puente ya que suministra interoperabilidad entre
buses y diferentes tipos de protocolos y además las aplicaciones pueden comunicarse
a través de él.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 132
Enrutadores. Es un switch "Enrutador" de paquetes de comunicación entre diferentes
segmentos de red que definen la ruta.
TOPOLOGÍA DE REDES INDUSTRIALES.
Los sistemas industriales usualmente consisten de dos o más dispositivos, como un
sistema industrial puede ser bastante grande debe considerarse la topología de la red; las
topologías más comunes son: La Red Bus, Red Estrella y Red Híbrida.
BENEFICIOS DE UNA RED INDUSTRIAL.
Reducción de cableado (físicamente) - Dispositivos inteligentes (funcionalidad y
ejecución).
Control distribuido (Flexibilidad).
Simplificación de cableado de las nuevas instalaciones.
Reducción de costo en cableado y cajas de conexión.
Aplicable a todo tipo de sistema de manufactura.
Incremento de la confiabilidad de los sistemas de producción.
Optimización de los procesos existentes.
REDES INDUSTRIALES CON PLC.
Muchos sistemas están conformados por equipos de diferentes fabricantes y funcionan en
diferentes niveles de automatización; además, a menudo se encuentran distanciados
entre sí; pero sin embargo, se desea que trabajen en forma coordinada para un resultado
satisfactorio del proceso. El objetivo principal es la comunicación totalmente integrada en
el sistema. Al usuario, esto le reporta la máxima flexibilidad ya que también puede integrar
sin problemas productos de otros fabricantes a través de las interfaces software
estandarizadas. En los últimos años, las aplicaciones industriales basadas en
comunicación digital se han incrementado haciendo posible la conexión de sensores,
actuadores y equipos de control en una planta de procesamiento.
De esta manera, la comunicación entre la sala de control y los instrumentos de campo se
han convertido en realidad. La Comunicación digital debe integrar la información provista
por los elementos de campo en el sistema de control de procesos.
SOLUCIONES CON ETHERNET.
Aunque los buses de campo continuarán dominando las redes industriales, las soluciones
basadas en Ethernet se están utilizando cada vez más en el sector de las tecnologías de
automatización, donde las secuencias de procesos y producción son controladas por un

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 133
modelo cliente/servidor con controladores, PLC y sistemas ERP (Planificación de los
recursos de la empresa), teniendo acceso a cada sensor que se conecta a la red.
La implementación de una red efectiva y segura también requiere el uso de conectores
apropiados, disponibles en una amplia variedad y para soluciones muy flexibles. Los
Gateway son dispositivos de capa de transporte; en donde la capa de aplicación no
necesariamente es software por lo general las aplicaciones son de audio (alarmas), vídeo
(vigilancia), monitoreo y control (sensores), conversión análoga/digital y digital/análoga.
Para la programación de gateway de alto nivel se utiliza el C++ y para la programación
menos avanzada se hace con hojas de cálculo. Estos dispositivos pueden ser
programados de tal forma que en caso de una emergencia o un simple cambio a otro
proceso no se haga manualmente sino realmente automático.
TAREA 4: IMPLEMENTA PROYECTOS DE CONTROL BASADO EN
COMPUTADORA.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 134
Los primeros SCADA eran simplemente sistemas de telemetría, que proporcionaban
reportes periódicos de las condiciones de campo vigilando las señales que representaban
medidas y/o condiciones de estado en ubicaciones de campo remotas. Estos sistemas
ofrecían capacidades muy simples de monitoreo y control, sin proveer funciones de
aplicación alguna. La visión del operador en el proceso estaba basada en los contadores
y las lámparas detrás de tableros llenos de indicadores. Mientras la tecnología se
desarrollaba, las computadoras asumieron el papel de manejar la recolección de datos,
disponiendo comandos de control, y una nueva función - presentación de la información
sobre una pantalla de video. Las computadoras agregaron la capacidad de programar el
sistema para realizar funciones de control más complejas. Como ingenieros de varias
industrias asistieron al diseño de estos sistemas, su percepción de SCADA adquirió las
características de su propia industria. Proveedores de sistemas de software SCADA,
deseando reutilizar su trabajo previo sobre los nuevos proyectos, perpetuaron esta
imagen de industria específicos por su propia visión de los ambientes de control con los
cuales tenían experiencia. Solamente cuando nuevos proyectos requirieron funciones y
aplicaciones adicionales, hizo que los desarrolladores de sistemas SCADA tuvieran la
oportunidad de desarrollar experiencia en otras industrias
Equipos y Materiales:
Computador Pentium 4 o superior.
Sistema operativo Windows XP o superior.
Controlador lógico Programable Simatic S7-1200 o superior.
Equipo concentrador de red D-LINK.
Equipo concentrador de red inalámbrica D-LINK DWL-2100AP.
Programa de Automatización TIA Portal11.
Cable de comunicación de datos según norma TIA 568-B.
Orden de Ejecución:
Instalación del Programa de Automatización Industrial en la computadora.
Implementación de las tareas y comprobación del correcto funcionamiento de los
equipos.
DESARROLLA UN SISTEMA DE SUPERVISIÓN Y CONTROL PARA UN
PROCESO REMOTO.
En esta actividad vamos a diseñar un HMI interfaz hombre máquina que controlara un
PLC Siemens S7-1200 conectado en una red Ethernet Industrial, para diseñar este

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 135
sistema de supervisión emplearemos es software TIA Portal V11 que incluye en programa
WinCC para crear los diferentes objetos visuales que podremos simular en la
computadora o descargarlo en un Touch Panel Siemens KTP 1000 Basic.
SISTEMAS HMI.
HMI significa “Human Machine Interface”, es decir es el dispositivo o sistema que
permite la interfaz entre una persona y la máquina. Tradicionalmente estos sistemas
consistían en paneles compuestos por indicadores y comandos, tales como luces pilotos,
indicadores digitales y análogos, registradores, pulsadores, selectores y otros que se
interconectaban con la máquina o proceso. En la actualidad, dado que las máquinas y
procesos en general están implementadas con controladores y otros dispositivos
electrónicos que dejan disponibles puertas de comunicación, es posible contar con
sistemas de HMI bastantes más poderosos y eficaces, además de permitir una conexión
más sencilla y económica con el proceso o máquinas, podemos mencionar:
Terminal de Operador, consistente en un dispositivo, generalmente construido para
ser instalado en ambientes agresivos, donde pueden ser solamente de despliegues
numéricos, o alfanuméricos o gráficos. Pueden ser además con pantalla sensible al
tacto (touch screen)
PC + Software, esto constituye otra alternativa basada en un PC en donde se carga un
software apropiado para la aplicación. Como PC se puede utilizar cualquiera según lo
exija el proyecto, en donde existen los llamados Industriales (para ambientes
agresivos), los de panel (Panel PC) que se instalan en gabinetes dando una apariencia
de terminal de operador, y en general veremos muchas formas de hacer un PC,
pasando por el tradicional PC de escritorio.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 136
PROCEDIMIENTO.
1. Realizaremos la supervisión del proceso de almacenamiento de un producto, este es
transportado hasta una máquina que los empaqueta y almacena en un depósito, este
proceso debe ser monitoreado por el supervisor desde su despacho mientras los
trabajadores realizan sus labores. Conectaremos el controlador al proceso, luego
realizaremos su programación y enlace a la red industrial, finalmente trabajaremos el
HMI. Debemos tener en cuenta que todas las variables o Tags serán mencionadas por
el nombre de marca y no por su dirección absoluta, una de las ventajas de trabajar con
el programa TIA portal está en que declaramos todas las variables al iniciar el proyecto.
2. Iniciamos el programa TIA portal y creamos un nuevo proyecto, en esta primera parte
seleccionamos PLC S7 1200.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 137
3. Seleccionamos la opción de configuramos de dispositivos, luego ingresamos la
dirección IP para acceder al controlador desde la red y realizar su programación (el
controlador S7 1200 no posee puerto serie integrado).
4. Realizamos el programa que cargara el controlador, para realizar la programación
ingresamos a la opción “Bloques de Programa” y seleccionamos el bloque “Main-OB1”
que es el bloque principal de nuestro programa.
5. Los bloques de programación será insertados desde la paleta de “Instrucciones
Básicas” en la que podemos escoger: operaciones lógicas con bits, temporizadores,
comparadores, contadores, funciones matemáticas, conversión, etc.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 138
6. El segmento1 se encarga de las funciones básicas del sistema: iniciar proceso
BTN_START, BIT_START_HMI, terminar proceso: BTN_STOP,
MEN_CANTIDAD_PRODUCTOS_COMPLETA y la bobina correspondiente a la marca
del motor. M_MOTOR_FAJA.
7. El segmento2 se encarga de transportar el producto y este proceso inicia cuando la
marca del motor M_MOTOR_FAJA, SENSOR_INGRESO_PRODUCTO tiene el valor
de “1”, esto activara al temporizador TIMER_TRANSPORTE, mientras el temporizador
este activado activara a un FLIP_FLOP denominado M_TRANSPORTE que se
encargara de activar a la salida del motor Q_MOTOR_FAJA y al mismo tiempo a
INDICADOR DE ACTIVIDAD. La salida Q_MOTOR_FAJA será detenida si activamos
BTN_STOP, BIT_STOP_HMI, MEN_CANTIDAD_PRODUCTOS_COMPLETA. El valor
del contador es una variable de tipo TIME, esta variable será convertida y luego
dividida para obtener un numero de tipo entero con T_SEG_TRANSPORTE.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 139
8. El segmento3 se encarga de sellar el producto cuando
SENSOR_LLEGADA_PRODUCTO sea verdadero, activara al segundo temporizador
denominado TIMER_SELLADO, cuando suceda este evento el flip-flop
MEMORIA_SELLADO activara la salida de sellado. La salida Q_PISTON_SELLADO
se mantendrá activada hasta que BTN_STOP, BIT_STOP_HMI,
MEN_CANTIDAD_PRODUCTOS_ COMPLETA sean verdaderas. En este segmento
también se toma el tiempo de sellado y el tiempo TIMER_SELLADO es convertido y
almacenado en la variable TIEMPO_SEG_SELLADO.
9. El segmento4 se encarga del almacenamiento del producto, el pistón de
almacenamiento del producto en el depósito, en ese instante se desactivaran
M_MOTOR_FAJA, MEMORIA_SELLADO, M_TRANSPORTE, el pistón de sellado se
mantendrá activada hasta que BTN_STOP, BIT_STOP_HMI,
MEN_CANTIDAD_PRODUCTOS_ COMPLETA sean verdaderas. Cuando el producto
se almacenado se activara SENSOR_PRODUCTO_ALMACENADO e iniciara el

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 140
contador que tendrá como limite la variable MEMORIA_CANT_MAX_PRODUCTOS, si
las cantidades son iguales ya no se podrá colocar más depósitos en la faja
transportadora.
10. Adicionalmente se agregó un bloque de función denominado “SENSOR DE
ACTIVIDAD” que tiene la función de activar una salida intermitente que será
conectada a indicadores luminosos, para avisar a los operadores que la maquina se
encuentra en actividad.
11. Luego de descargar el programa en el controlador agregamos un nuevo dispositivo
en el árbol de proyecto que en este caso será la interfaz HMI.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 141
12. Seleccionamos al HMI KPT100 dentro de las opciones SIMATIC Basic Panel de 10
pulgadas.
13. Configuramos la conexión del HMI Panel con el controlador, seleccionándolo
presionando el botón examinar.
14. En la ventana de presentación de la imagen se puede personalizar la presentación
del color de la interfaz y el encabezado, en este caso será hora, fecha y Logotipo.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 142
15. En la ventana de botones podemos ubicar los botones: inicio de sesión, imagen inicial
e idioma, estos botones se ubican en la parte inferior.
16. En la ventana de botones podemos ubicar los botones: inicio de sesión, imagen inicial
e idioma, estos botones se ubican en la parte inferior.
17. Podemos comprobar la comunicación Ethernet seleccionando la opción “Dispositivos
y redes”, veremos los dispositivos conectados a la red Profinet PN/IE_1 con una línea
de color verde.
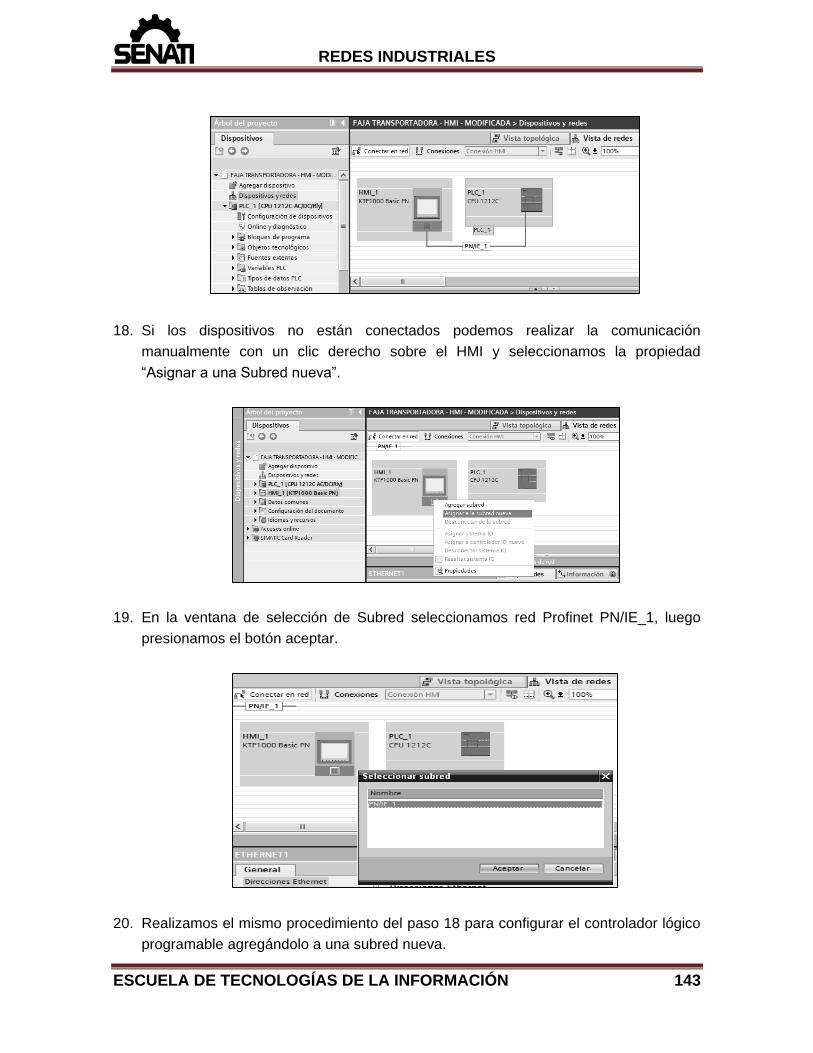
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 143
18. Si los dispositivos no están conectados podemos realizar la comunicación
manualmente con un clic derecho sobre el HMI y seleccionamos la propiedad
“Asignar a una Subred nueva”.
19. En la ventana de selección de Subred seleccionamos red Profinet PN/IE_1, luego
presionamos el botón aceptar.
20. Realizamos el mismo procedimiento del paso 18 para configurar el controlador lógico
programable agregándolo a una subred nueva.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 144
21. Luego de realizar la configuración manual de los equipos la vista de redes quedara
como la imagen a continuación.
22. Después de personalizar la ventana del programa HMI, el programa TIA muestra la
imagen raíz en la que agregaremos los objetos visuales, estos objetos pueden ser
botones, registros de nivel, formas, indicadores numéricos y gráficos, los objetos
pueden arrastrarse y soltarse desde de la paleta “Gráficos” desde la librería
“Automation Equipment”.
23. En la figura que se muestra a continuación veremos la interfaz del sistema para
sellado de paquetes, estos objetos se pueden enlazar a los tags que creamos en el
programa del controlador lógico programable.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 145
24. Las etiquetas relacionadas al estado de sensores, motores y pistones se pueden
configurar de tal forma que cuando se activen el fondo de esta etiqueta cambie de
color, por ejemplo selecciónalos la etiqueta de texto S1:ON y en la ventana de
propiedades del objeto agregamos la animación apariencia.
25. En la celda nombre buscamos la variable del PLC relacionada al sensor de ingreso
de producto, luego presionamos el botón aceptar.
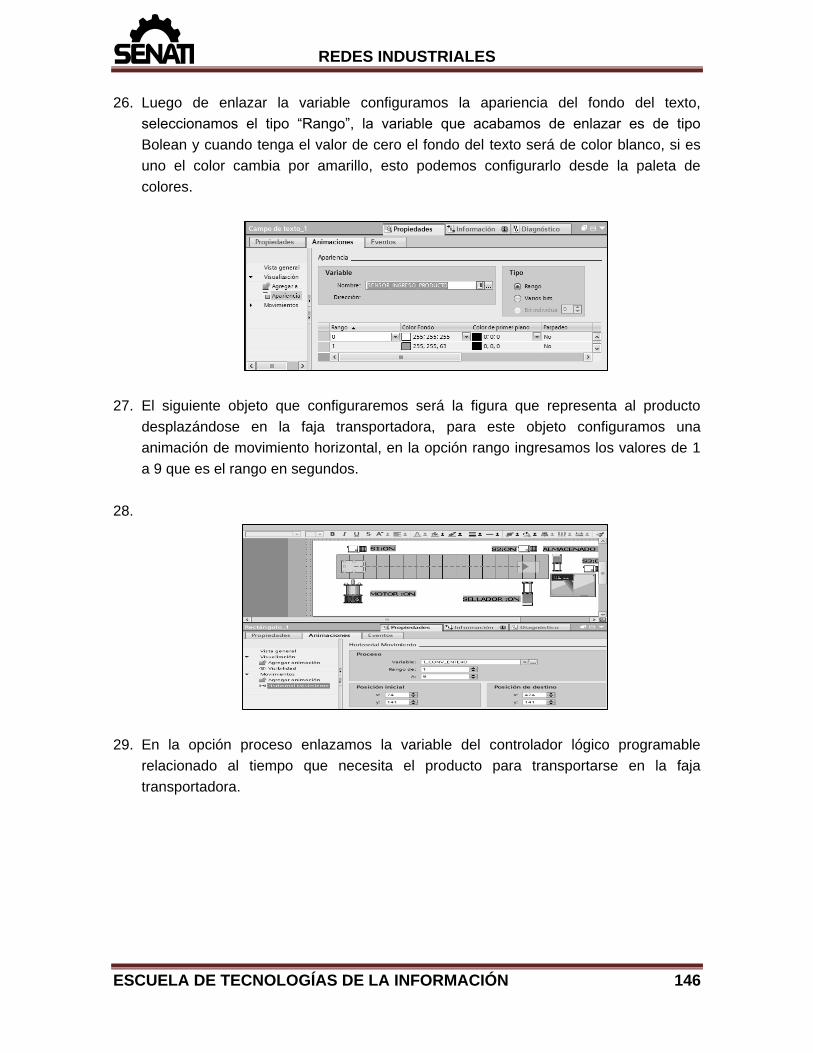
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 146
26. Luego de enlazar la variable configuramos la apariencia del fondo del texto,
seleccionamos el tipo “Rango”, la variable que acabamos de enlazar es de tipo
Bolean y cuando tenga el valor de cero el fondo del texto será de color blanco, si es
uno el color cambia por amarillo, esto podemos configurarlo desde la paleta de
colores.
27. El siguiente objeto que configuraremos será la figura que representa al producto
desplazándose en la faja transportadora, para este objeto configuramos una
animación de movimiento horizontal, en la opción rango ingresamos los valores de 1
a 9 que es el rango en segundos.
28.
29. En la opción proceso enlazamos la variable del controlador lógico programable
relacionado al tiempo que necesita el producto para transportarse en la faja
transportadora.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 147
30. En la configuración de la figura debemos tener en cuenta que cuando el valor de la
variable relacionada al tiempo tiene valor es cero, se debe configurar como invisible,
en caso contrario siempre se observaría al grafico en movimiento.
31. Para configurar el objeto botón enlazamos la variable START con la etiqueta del
controlador lógico programable.
32. El objeto botón es manejado por eventos, en este caso se configura la variable
BIT_START_HMI con los eventos Pulsar y Soltar, para cada evento debemos enlazar
la variable de tal manera que cada vez que el botón sea pulsado cambie su estado al
ser soltado.
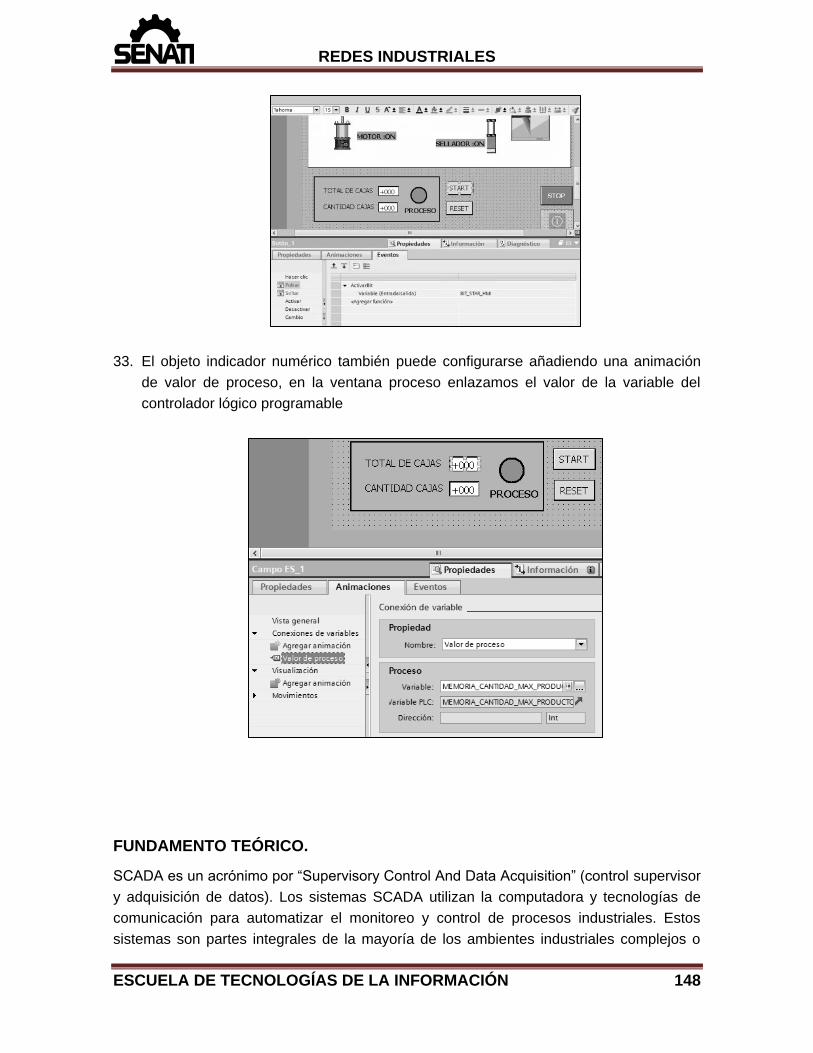
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 148
33. El objeto indicador numérico también puede configurarse añadiendo una animación
de valor de proceso, en la ventana proceso enlazamos el valor de la variable del
controlador lógico programable
FUNDAMENTO TEÓRICO.
SCADA es un acrónimo por “Supervisory Control And Data Acquisition” (control supervisor
y adquisición de datos). Los sistemas SCADA utilizan la computadora y tecnologías de
comunicación para automatizar el monitoreo y control de procesos industriales. Estos
sistemas son partes integrales de la mayoría de los ambientes industriales complejos o

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 149
muy geográficamente dispersos, ya que pueden recoger la información de una gran
cantidad de fuentes muy rápidamente, y la presentan a un operador en una forma
amigable. Los sistemas SCADA mejoran la eficacia del proceso de monitoreo y control
proporcionando la información oportuna para poder tomar decisiones operacionales
apropiadas.
Los primeros SCADA eran simplemente sistemas de telemetría, que proporcionaban
reportes periódicos de las condiciones de campo vigilando las señales que representaban
medidas y/o condiciones de estado en ubicaciones de campo remotas. Estos sistemas
ofrecían capacidades muy simples de monitoreo y control, sin proveer funciones de
aplicación alguna. La visión del operador en el proceso estaba basada en los contadores
y las lámparas detrás de tableros llenos de indicadores. Mientras la tecnología se
desarrollaba, las computadoras asumieron el papel de manejar la recolección de datos,
disponiendo comandos de control, y una nueva función - presentación de la información
sobre una pantalla de video. Las computadoras agregaron la capacidad de programar el
sistema para realizar funciones de control más complejas. Como ingenieros de varias
industrias asistieron al diseño de estos sistemas, su percepción de SCADA adquirió las
características de su propia industria. Proveedores de sistemas de software SCADA,
deseando reutilizar su trabajo previo sobre los nuevos proyectos, perpetuaron esta
imagen de industria específicos por su propia visión de los ambientes de control con los
cuales tenían experiencia. Solamente cuando nuevos proyectos requirieron funciones y
aplicaciones adicionales, hizo que los desarrolladores de sistemas SCADA tuvieran la
oportunidad de desarrollar experiencia en otras industrias.
Hoy, los proveedores de SCADA están diseñando sistemas que son pensados para
resolver las necesidades de muchas industrias, con módulos de software industria
específicos disponibles para proporcionar las capacidades requeridas comúnmente. No es
inusual encontrar software SCADA comercialmente disponible adaptado para
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 150
procesamiento de papel y celulosa, industrias de aceite y gas, hidroeléctricas,
gerenciamiento y provisión de agua, control de fluidos, etc. Puesto que los proveedores
de SCADA aún tienen tendencia en favor de algunas industrias sobre otras, los
compradores de estos sistemas a menudo dependen del proveedor para una comprensiva
solución a su requisito, y generalmente procurar seleccionar un vendedor que pueda
ofrecer una completa solución con un producto estándar que esté apuntado hacia las
necesidades específicas del usuario final. Si selecciona a un vendedor con experiencia
limitada en la industria del comprador, el comprador debe estar preparado para asistir al
esfuerzo de ingeniería necesario para desarrollar el conocimiento adicional de la industria
requerido por el vendedor para poner con éxito el sistema en ejecución.
Para alcanzar un nivel aceptable de tolerancia de fallas con estos sistemas, es común
tener computadoras SCADA redundantes operando en paralelo en el centro primario del
control, y un sistema de reserva del mismo situado en un área geográficamente distante.
Esta arquitectura proporciona la transferencia automática de la responsabilidad del control
de cualquier ordenador que pueda llegar a ser inasequible por cualquier razón, a una
computadora de reserva en línea, sin interrupción significativa de las operaciones.
Sistemas similares a un sistema SCADA son vistos rutinariamente en fábricas, plantas de
tratamiento, etc. Éstos son llamados a menudo como Sistemas de Control Distribuidos
(DCS – “Distributed Control Systems”.) Tienen funciones similares a los sistemas SCADA,
pero las unidades de colección o de control de datos de campo se establecen
generalmente dentro de un área confinada. Las comunicaciones pueden ser vía una red
de área local (LAN), y serán normalmente confiables y de alta velocidad. Un sistema DCS
emplea generalmente cantidades significativas de control a lazo cerrado.
Un sistema SCADA por otra parte, generalmente cubre áreas geográficas más grandes, y
normalmente depende de una variedad de sistemas de comunicación menos confiables
que una LAN. El control a lazo cerrado en esta situación será menos deseable. Un
sistema SCADA se utiliza para vigilar y controlar la planta industrial o el equipamiento. El
control puede ser automático, o iniciado por comandos de operador. La adquisición de
datos es lograda en primer lugar por las RTU que exploran las entradas de información de
campo conectadas con ellos (pueden también ser usados PLC – “Programmable Logic
Controllers”).
Esto se hace generalmente a intervalos muy cortos. La MTU entonces explorará las RTU
generalmente con una frecuencia menor. Los datos se procesarán para detectar
condiciones de alarma, y si una alarma estuviera presente, sería catalogada y visualizada
en listas especiales de alarmas. Los datos pueden ser de tres tipos principales:

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 151
Datos analógicos (por ejemplo números reales) que quizás sean presentados en
gráficos.
Datos digitales (on/off) que pueden tener alarmas asociadas a un estado o al otro.
Datos de pulsos (por ejemplo conteo de revoluciones de un medidor) que serán
normalmente contabilizados o acumulados.
La interfaz primaria al operador es una pantalla que muestra una representación de la
planta o del equipamiento en forma gráfica. Los datos vivos (dispositivos) se muestran
como dibujos o esquemas en primer plano (foreground) sobre un fondo estático
(background).
Mientras los datos cambian en campo, el foreground es actualizado (una válvula se puede
mostrar como abierta o cerrada, etc.). Los datos analógicos se pueden mostrar como
números, o gráficamente (esquema de un tanque con su nivel de líquido almacenado). El
sistema puede tener muchas de tales pantallas, y el operador puede seleccionar los más
relevantes en cualquier momento.
UNIDADES MAESTRAS (MASTER TERMINAL UNITS).
La parte más visible de un sistema SCADA es la estación central o MTU. Éste es el
"centro neurálgico" del sistema, y es el componente del cual el personal de operaciones
se valdrá para ver la mayoría de la planta. Una MTU a veces se llama HMI –“Human
Machine Interface”, interfaz ser humano – máquina.
CARACTERÍSTICAS DE LAS UNIDADES MAESTRAS.
Todas las MTU de SCADA deben presentar una serie de características, algunas de estas
son las siguientes:
Adquisición de datos. Recolección de datos de las unidades terminales remotas (RTU).
Gráficos de tendencia. Salvar los datos en una base de datos, y ponerlos a disposición
de los operadores en forma de gráficos.
Procesamiento de Alarmas. Analizar los datos recogidos de las RTU para ver si han
ocurrido condiciones anormales, y alertar a personal de operaciones sobre las mismas.
Control. Control a Lazo Cerrado, e iniciados por operador.
Visualizaciones. Gráficos del equipamiento actualizado para reflejar datos del campo. _
Informes La mayoría de los sistemas SCADA tienen un ordenador dedicado a la
producción de reportes conectado en red (LAN o similar) con el principal.
Mantenimiento del Sistema Mirror. Se debe mantener un sistema idéntico con la
capacidad segura de asumir el control inmediatamente sí la principal falla.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 152
Interfaces con otros sistemas. Transferencia de datos hacia y desde otros sistemas
corporativos para, por ejemplo, el procesamiento de órdenes de trabajo, de compra, la
actualización de bases de datos, etc.
Seguridad. Control de acceso a los distintos componentes del sistema.
Administración de la red. Monitoreo de la red de comunicaciones.
Administración de la Base de datos. Agregar nuevas estaciones, puntos, gráficos,
puntos de cambio de alarmas, y en general, reconfigurar el sistema.
Aplicaciones especiales. Casi todos los sistemas SCADA tendrán cierto software de
aplicación especial, asociado generalmente al monitoreo y al control de la planta
específica en la cual se está utilizando. Recordemos que las necesidades de las
diferentes industrias pueden ser muy variadas.
Sistemas expertos, sistemas de modelado. Los más avanzados pueden incluir
sistemas expertos incorporados, o capacidad de modelado de datos
HARDWARE Y SOFTWARE.
Las MTU de sistemas SCADA se pueden implementar en la mayoría de las plataformas
existentes. Los primeros sistemas existentes tendieron a ser propietarios y muy
especializados, y donde fueron utilizados sistemas operativos de fines generales,
tendieron a ser modificados ampliamente. Esto debido a que los requisitos de SCADA
superaban los límites de la tecnología disponible en el momento y por razones de
desempeño ya que tendieron a proporcionar sistemas gráficos por encargo, a usar bases
de datos en tiempo real (con gran parte de la base de datos en memoria), y a menudo el
hardware debió ser modificado para estos requisitos particulares. La serie Digital
Equipment Corporation PDP11 y el sistema operativo RSX11M eran quizás la plataforma
más común en los SCADA del siglo pasado. Posteriormente, Unix comenzó a ser el
sistema operativo de más frecuente elección. Mientras la potencia de la PC aumentaba,
los sistemas Intel llegaron a ser muy comunes, aunque las plataformas DEC Alfa, y otras
estaciones de trabajo de fines elevados estén aún en uso. En épocas recientes Windows
NT ha alcanzado alta aceptación dentro de la comunidad SCADA, aunque los sistemas
muy grandes siguen siendo en la mayor parte de los casos estaciones de trabajo Unix
(QNX o Solaris), las cuales son más veloces en sus respuestas.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 153
Actualmente la industria se está desarrollando claramente hacia estándares abiertos:
ODBC, INTEL PC, sistemas estándares de gráficos, e interconectividad a sistemas de
computación corrientes. En años recientes ha aparecido en el mercado un importante
número de sistemas SCADA sobre plataformas INTEL PC, ya que éstas están
aumentando rápidamente su capacidad y desempeño, ejemplos de ellos son Citect, FIX
de Intellution, KEPware, Wonderware y Wincc.
HARDWARE EN SISTEMAS DE SUPERVISIÓN: PLC Y PC.
El hecho es que las tareas automatizadas de control, visualización y computación pueden
ser efectuadas por los PLC (conectados en red mediante los módulos adecuados) mejor
que con sistemas exclusivos de control basados en PC. Lo que finalmente es práctico, no
obstante, depende de un gran número de factores y la mayoría deben ser considerados
individualmente para cada proyecto de automatización.
Así, por ejemplo, los actuales conocimientos y preferencias del usuario pueden jugar un
mayor papel que la pura potencia del ordenador. Los factores cruciales, no obstante, son
los atributos de capacidad en tiempo real y las propiedades de seguridad que hasta ahora
han sido fuertemente asociadas con el PLC, aunque el PC también puede disponer de la
característica de capacidad en tiempo real.
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 154
Un sistema de control es inconcebible sin capacidad en tiempo real. Es común en
sistemas de control por ordenador tener que elegir, según las características del sistema a
supervisar, entre el PLC o el PC. Se debe elegir aquel hardware que mejor se adapte a
las necesidades del sistema a supervisar.
Los controladores lógicos programables, en la mayoría de los casos, están diseñados
específicamente para ser empleados en ambientes industriales exigentes y han sido
continuamente desarrollados de forma que sus sistemas operativos en tiempo real
representan su mayor virtud. Ellos son y seguirán siendo, no obstante, la primera elección
para todo control de tareas críticas o extremas por su rendimiento y simpleza, en los que
un PC podría estar simplemente "sobrecargado" debido al trabajo que le pueden suponer
otras tareas de ámbito común, como la gestión y visualización de datos, accesos a
periféricos, bases de datos, etc. Si, además del control de tareas, se necesita un
procesamiento de datos, trabajo en red o visualización (una aplicación SCADA), un
sistema basado en PC debe ser tomado en consideración.
En cuanto a sistemas operativos, Windows NT, por ejemplo, no es estrictamente un
sistema operativo en tiempo real como el de un PLC, pero puede actuar de forma
suficientemente rápida para aplicaciones "suaves" en tiempo real, gracias a su
arquitectura de micro-kernel.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 155
USO DEL PC COMO CENTRO NEURAL DEL MTU.
En casa y en la oficina, el ordenador personal continúa con su progreso. El PC se ha
establecido en un gran número de campos. Los componentes hardware y software están
siendo cada vez más potentes y más rentables. Es lógico, por tanto, que la industria
quiera tomar provecho de este hecho, para reducir costes y/o incrementar la
productividad. Ciertas tareas industriales están actualmente en manos de los ordenadores
desde hace tiempo: desde emplear la tecnología Windows cuando se manejan pedidos
y/o se ajustan parámetros de maquinaria hasta preparar o visualizar datos prácticamente
de cualquier tipo.
No hay que sorprenderse entonces, que los especialistas en automatización y los
usuarios estén pensando ahora en qué forma se pueden transferir al PC otras tareas,
para poder llegar a un mayor ahorro. Más recientemente un gran número de simuladores
de PLC (controladores lógicos programables) por software ha aparecido en el mercado,
que están ayudando a transferir el control de tareas al disco duro y presentan una
automatización más efectiva en costes en una simple pieza de hardware (el PC).
Los computadores personales o PC tienen múltiples matices en cuanto a temas,
arquitectura y forma de utilizarse, entre ellos tenemos: (1) Supervisión de Procesos, en el
que se utilizan fundamentalmente los recursos del procesador para mostrar
dinámicamente el funcionamiento de un proceso, (2) El control, en el que el procesador, a
través de interfaces de entradas y salidas específicas permite manipular directamente el
proceso y (3) El sistema SCADA, Control Supervisado y Adquisición de datos, en el que
se realizan las dos funciones anteriores para sistemas relativamente complejos en los que
generalmente está involucrada las comunicaciones. Cada una de estas tres categorías
puede aplicarse en cualquier actividad sea industrial o manufacturera, tanto en el
laboratorio como en la planta. Para el control se utilizan diversos tipos de computadores
por lo que hay interfaces para las diversas arquitecturas internas, de las que el Bus PCI
es el más utilizado en la actualidad. En la industria es el bus COMPACT PCI el
equivalente más adecuado. Las computadoras industriales están preparadas para trabajar
en los ambientes duros de la industria.
Se ha discutido mucho el uso de los computadores haciendo la función de control,
felizmente la tecnología ha avanzado en este sentido y la tendencia es hacia sistemas
operativos más robustos, mientras tanto existen alternativas como la de LabVIEW Real
time de National Instruments, en el que la interfaz de entradas y salidas en el micro-
computador alberga un sistema operativo de tiempo real en el que se ejecuta el programa
de control, de esta forma se tienen disponibles las ventajas de Windows y el control no se
pierde aun cuando el sistema operativo (Windows) colapse.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 156
Los sistemas SCADA están constituidos por el Hardware, que generalmente es una red
de controladores y estaciones remotas de adquisición de datos. El corazón de un sistema
SCADA está en el "Software SCADA", que es el encargado de supervisar y controlar el
Proceso a través del Hardware de control, generalmente el software SCADA trabaja
conjuntamente con un PLC o una red de PLC. Este software permite supervisar el
proceso desde un microcomputador, así como realizar las acciones de control a través del
PLC, controlador o sistema de control. En el mercado existen varios programas que
realizan esta función.
Tan importante como el 'Hardware' es el 'Software' especializado para el control y la
supervisión de procesos. Los niveles de 'software' podrían ser escalonados en: (1)
'Software' de manejo a nivel de registros para las interfaces, (2) programas de usuario en
lenguajes de alto nivel, utilizando rutinas suministradas por los fabricantes de 'hardware',
(3) Sistemas de desarrollo y generadores de código fuente dedicados a la adquisición y
procesamiento de data así como el control y supervisión de procesos tal como LabVIEW
antes mencionado, (4) 'Paquetes' de control y supervisión de procesos, que permiten
administrar el 'hardware' de control de procesos basados en controladores lógicos
programables (PLC), supervisar los procesos y administrar redes de microcomputadores y
de controladores lógicos programables. La mayoría de Software de alta performance para
la Automatización Industrial se ejecuta bajo Microsoft Windows NT, 98, 2000, Xp deben
proveer una interfaz gráfica para su proceso, ya sea como Interfaz Humano Máquina
(HMI: “Human Machine Interface”), o como un sistema de Supervisión, Control y
Adquisición de Datos (SCADA).
ADQUISICIÓN DE DATOS.
La función de adquisición de datos de un sistema SCADA es obviamente una función
preponderante. Hay un número de características asociadas a la adquisición de datos.
Los primeros sistemas SCADA tenían RTU tontos y el sistema central debía utilizar un
sistema de interrogación (“polling”) para tener acceso a sus datos. La unidad maestra
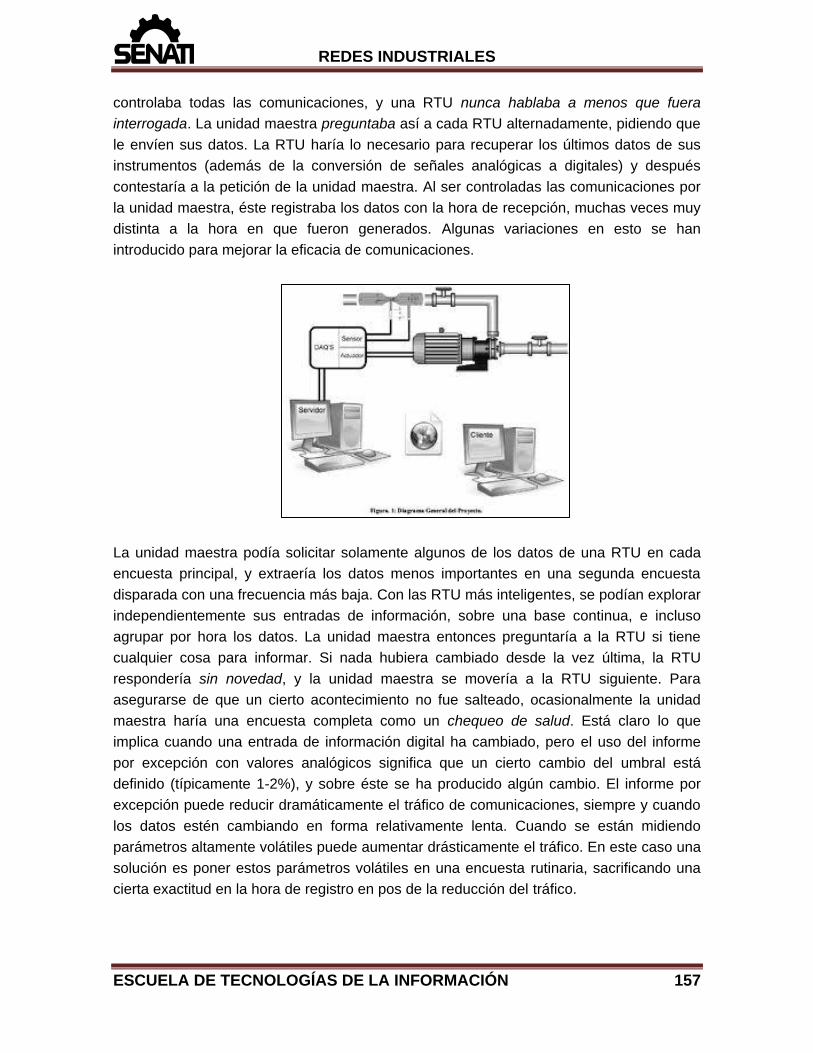
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 157
controlaba todas las comunicaciones, y una RTU nunca hablaba a menos que fuera
interrogada. La unidad maestra preguntaba así a cada RTU alternadamente, pidiendo que
le envíen sus datos. La RTU haría lo necesario para recuperar los últimos datos de sus
instrumentos (además de la conversión de señales analógicas a digitales) y después
contestaría a la petición de la unidad maestra. Al ser controladas las comunicaciones por
la unidad maestra, éste registraba los datos con la hora de recepción, muchas veces muy
distinta a la hora en que fueron generados. Algunas variaciones en esto se han
introducido para mejorar la eficacia de comunicaciones.
La unidad maestra podía solicitar solamente algunos de los datos de una RTU en cada
encuesta principal, y extraería los datos menos importantes en una segunda encuesta
disparada con una frecuencia más baja. Con las RTU más inteligentes, se podían explorar
independientemente sus entradas de información, sobre una base continua, e incluso
agrupar por hora los datos. La unidad maestra entonces preguntaría a la RTU si tiene
cualquier cosa para informar. Si nada hubiera cambiado desde la vez última, la RTU
respondería sin novedad, y la unidad maestra se movería a la RTU siguiente. Para
asegurarse de que un cierto acontecimiento no fue salteado, ocasionalmente la unidad
maestra haría una encuesta completa como un chequeo de salud. Está claro lo que
implica cuando una entrada de información digital ha cambiado, pero el uso del informe
por excepción con valores analógicos significa que un cierto cambio del umbral está
definido (típicamente 1-2%), y sobre éste se ha producido algún cambio. El informe por
excepción puede reducir dramáticamente el tráfico de comunicaciones, siempre y cuando
los datos estén cambiando en forma relativamente lenta. Cuando se están midiendo
parámetros altamente volátiles puede aumentar drásticamente el tráfico. En este caso una
solución es poner estos parámetros volátiles en una encuesta rutinaria, sacrificando una
cierta exactitud en la hora de registro en pos de la reducción del tráfico.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 158
El acercamiento más sofisticado es permitir que la RTU reporte por excepción sin la
encuesta previa por parte de la unidad maestra. Esto significa que el sistema de
comunicaciones no se está utilizando para las repetidas encuestas con sin novedad
siendo la respuesta más frecuente. Esto permite que un sistema típico controle muchos
más RTU con la misma anchura de banda de comunicaciones. Como los asuntos
asociados con parámetros altamente volátiles todavía existen, un chequeo de salud en
background sigue siendo necesario, de otro modo una RTU podría salir de servicio y el
sistema nunca se daría por enterado.
Para utilizar esta técnica, el protocolo de comunicación debe tener la capacidad de
proporcionar las direcciones de destino del mensaje, y de la fuente del mismo. Este
sistema también implica que dos RTU pueden transmitir simultáneamente, interfiriendo
uno con otro. Un sistema SCADA normalmente repetirá la transmisión si no recibe un
acuse de recibo dentro de cierto tiempo. Si interfieren dos RTU transmitiendo
simultáneamente, y, luego si ambos poseen el mismo tiempo de reenvío, interferirán otra
vez. Por esta razón, el acercamiento típico es repetir el envío después de un período
aleatoriamente seleccionado. El uso de timeouts al azar puede no ser suficiente cuando
por ejemplo ha habido un apagón extenso. Incluso con re comprobaciones al azar, puede
haber tanto tráfico que la RTU todavía no podrá conseguir realizar la transmisión. Por esta
razón una mejora que es deseable es que después de 5 intentos, el período de re
comprobación se fije en por ejemplo 1 minuto.
HUMAN MACHINE INTERFACE.
HMI significa “Human Machine Interface”, es decir es el dispositivo o sistema que
permite el interfaz entre la persona y la máquina. Tradicionalmente estos sistemas
consistían en paneles compuestos por indicadores y comandos, tales como luces pilotos,
indicadores digitales y análogos, registradores, pulsadores, selectores y otros que se
interconectaban con la máquina o proceso. En la actualidad, dado que las máquinas y
procesos en general están implementadas con controladores y otros dispositivos
electrónicos que dejan disponibles puertas de comunicación, es posible contar con
sistemas de HMI bastantes más poderosos y eficaces, además de permitir una conexión
más sencilla y económica con el proceso o máquinas, como mostraremos a continuación.
Tipos de HMI:
Descontando el método tradicional, podemos distinguir básicamente dos tipos de HMIs:
Terminal de Operador, consistente en un dispositivo, generalmente construido para
ser instalado en ambientes agresivos, donde pueden ser solamente de despliegues

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 159
numéricos, o alfanuméricos o gráficos. Pueden ser además con pantalla sensible al
tacto (touch screen).
PC + Software, esto constituye otra alternativa basada en un PC en donde se carga un
software apropiado para la aplicación. Como PC se puede utilizar cualquiera según lo
exija el proyecto, en donde existen los llamados Industriales (para ambientes
agresivos), los de panel (Panel PC) que se instalan en gabinetes dando una apariencia
de terminal de operador, y en general veremos muchas formas de hacer un PC,
pasando por el tradicional PC de escritorio.
Software HMI: Estos software permiten entre otras cosas las siguientes funciones:
Interfase gráfica de modo de poder ver el proceso e interactuar con él, registro en
tiempo real e histórico de datos, manejo de alarmas. Si bien es cierto sólo con la
primera función enunciada es la propiamente HMI, casi todos los proveedores incluyen
las otras dos ya sea en el mismo paquete o bien como opcionales. También es normal
que dispongan de muchas más herramientas. Al igual que en los terminales de
operador, se requiere de una herramienta de diseño o desarrollo, la cual se usa para
configurar la aplicación deseada, y luego debe quedar corriendo en el PC un software
de ejecución (Run Time).
WinCC.
WinCC es un sistema HMI eficiente para la entrada bajo Microsoft Windows 2000y
Windows XP. HMI significa "Human Machine Interface", o sea las interfaces entre el
hombre (el usuario) y la maquina (el proceso). El control sobre el proceso en sí lo tiene el
autómata programable (PLC). Es decir, por un lado hay una comunicación entre WinCC y
el operador, y por otro lado entre WinCC y los autómatas programables. Con WinCC se
visualiza el proceso y se programa la interfaz gráfica de usuario para el operador.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 160
WinCC permite que el operador observe el proceso, para lo cual el proceso es
visualizado gráficamente en la pantalla. En cuanto cambia un estado en el proceso se
actualiza la visualización.
WinCC permite que el operador maneje el proceso; así, desde la interfaz gráfica de
usuario él puede predeterminar un valor de consigna, abrir una válvula, etc.
Cuando se presenta algún estado crítico en el proceso se activa automáticamente una
alarma; si se rebasa un valor límite predeterminado, por ejemplo, aparece un aviso en
la pantalla.
Los avisos y los valores de proceso se pueden imprimir y archivar en formato
electrónico. El usuario documenta así la evolución del proceso y puede acceder
posteriormente a los datos de producción del pasado.
Características:

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 161
El usuario puede integrar WinCC de modo óptimo en soluciones de automatización y en
soluciones IT (Information Technology):
En su calidad de componente del concepto TIA de Siemens (Totally Integrated
Automation), WinCC opera con autómatas programables de la serie de productos
SIMATIC con un grado de coordinación y cooperación especialmente eficaz. También
están soportados los sistemas de automatización de otros fabricantes.
Por medio de interfaces estandarizadas se intercambian los datos de WinCC con otras
soluciones IT, por ejemplo con aplicaciones de los niveles MES y ERP (un sistema
SAP, por ejemplo), o con programas tales como Microsoft Excel.
Aplicando las interfaces de programación de WinCC se pueden interconectarlos
propios programas para controlar el proceso y para seguir procesando los datos.
WinCC puede ser adaptado de modo óptimo a los requisitos de cada proceso. Se
soporta un gran número de configuraciones, desde un sistema mono puesto hasta los
sistemas redundantes distribuidos que tienen varios servidores, pasando por sistemas
cliente - servidor.
La configuración WinCC se puede modificar en cualquier momento, también
posteriormente, sin que por ello se vean afectados los proyectos existentes.
WinCC es un sistema HMI apto para utilizarlo con Internet, pudiendo implementar
soluciones de cliente basadas en la Web y soluciones de tipo "thin client".
Estructura de WinCC.
WinCC es un sistema modular. Sus componentes básicos son el software de
configuración (CS) y el software Runtime (RT).
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 162
Software de configuración.
Al iniciar WinCC se abre el programa WinCC Explorer. WinCC Explorer con sustituye el
núcleo del software de configuración. En WinCC Explorer se representa la estructura
global del proyecto y se gestiona el proyecto. Para configurar se dispone de unos editores
específicos que pueden activar sedes de WinCC Explorer. Con cada uno de los editores
se configura un determinado subsistema de WinCC. Los principales subsistemas de
WinCC son:
El sistema de gráficos – el editor para confeccionar las imágenes es Graphics
Designer.
El sistema de avisos – el editor para configurar los avisos se llama Alarm Logging.
El sistema de ficheros – el editor para determinar los datos a archivar es Tag Logging.
El sistema de informes – el editor para elaborar el diseño de los informes se llama
Report Designer.
La administración de usuario – el editor para administrar los usuarios y sus respectivos
derechos es User Administrator.
La comunicación – se configura directamente en WinCC Explorer. Todos los datos de
configuración se memorizan en la base de datos CS.
Software de Runtime.
Con el software de Runtime el usuario puede visualizar y manejar el proceso. En este
contexto, el software de Runtime tiene fundamentalmente las siguientes tareas:
Leer los datos memorizados en la base de datos CS.
Visualizar las imágenes en la pantalla.
Realizar la comunicación con los autómatas programables.
Archivar los datos Runtime, p. ej. valores de proceso y eventos de avisos.
Manejar el proceso, p. ej. predeterminando valores de consigna o
activando/desactivando.
SIMATIC WinCC Sm@rtServer (TIA Portal).
La opción WinCC Sm@rtServer permite el manejo y la visualización de sistemas SIMATIC
HMI de forma remota a través de Industrial Ethernet o Intranet/Internet. La opción ofrece
sencillos mecanismos de cliente/servidor para Panels así como para PC con WinCC
RuntimeAdvanced.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 163
Ventajas:
Estaciones distribuidas para el manejo de máquinas de gran tamaño o repartidas
espacialmente.
Solución flexible para acceder a estaciones de mando independientemente del lugar.
Acceso global del personal de servicio técnico y mantenimiento a las máquinas e
instalaciones.
Funciones:
El acceso de una estación de mando local puede realizarse básicamente de dos formas
diferentes.
Visualización y manejo de imágenes mediante el concepto Sm@rtClient
En el marco del concepto Sm@rtClient, una estación puede poner sus imágenes a
disposición de otra. Para ello, una estación asume las funciones de un Sm@rtServer, y
la otra las de un Sm@rtClient. La función de servidor puede activarse muy fácilmente
mediante un clic del ratón en los parámetros de ajuste. La visualización de la imagen
en el Sm@rtClient puede efectuarse mediante la denominada vista de Sm@rtClient en
el modo "View only", pero también puede configurarse un puesto de mando completo y
coordinado. El "manejo coordinado" implica que en cada momento determinado sólo
una de las estaciones posee el derecho de mando: o la que tiene función Sm@rtServer
o la que tiene función de Sm@rtClient. Dependiendo del hardware básico, un
Sm@rtServer puede proporcionar sinópticos de proceso actualizados a un máximo de
cinco clientes al mismo tiempo (con PC; con paneles, a un máximo de tres clientes),
teniendo en cuenta que siempre debe reservarse un canal para fines de servicio
técnico.
Estaciones de mando distribuidas. El concepto Sm@rtClient simplifica el manejo de
máquinas e instalaciones de grandes dimensiones y distribuidas espacialmente, ya que
permite configurar estaciones de mando distribuidas, de modo que el operador puede
manejar y controlar desde diferentes ubicaciones, y todo ello con una única

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 164
configuración. En tal caso, las modificaciones de la configuración sólo deben realizarse
una vez en el Sm@rtServer. El operador ve la misma imagen en cada estación de
mando, aunque en cada momento determinado sólo puede manejarse una (manejo
coordinado).
Control remoto mediante Internet Explorer. Para el manejo y la visualización de
forma remota de paneles SIMATIC o WinCC Runtime Advanced, basta un navegador
estándar con el que el usuario tiene acceso directo al panel local a través de las
páginas HTML estándar de las estaciones de mando. Si, en lugar de un navegador, se
utiliza el Sm@rtClient Viewer, este no solo muestra la imagen seleccionada, sino
también el diseño del equipo local, por ejemplo el frente con membrana de un equipo
con teclado. Con esta herramienta, el panel se maneja como si el usuario lo tuviera
delante, con la diferencia de que las teclas no se pulsan realmente, sino que se hace
clic en ellas con el ratón.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 165
TAREA 5: IMPLEMENTA CONTROL DE PROCESOS OPC.
El OPC (OLE for Process Control) es un estándar de comunicación en el campo del
control y supervisión de procesos industriales, basado en una tecnología Microsoft, que
ofrece un interface común para comunicación que permite que componentes software
individuales interaccionen y compartan datos. La comunicación OPC se realiza a través
de una arquitectura Cliente-servidor. El servidor OPC es la fuente de datos (como un
dispositivo hardware a nivel de planta) y cualquier aplicación basada en OPC puede
acceder a dicho servidor para leer/escribir cualquier variable que ofrezca el servidor. Es
una solución abierta y flexible al clásico problema de los drivers propietarios.
Prácticamente todos los mayores fabricantes de sistemas de control, instrumentación y de
procesos han incluido OPC en sus productos.
Equipos y Materiales:
Computador Pentium 4 o superior.
Sistema operativo Windows XP o superior.
Controlador lógico Programable S7-1200 Siemens.
Equipo concentrador de red D-LINK.
Programa de Automatización LabVIEW + OPC Server 2012.
Cable de comunicación de datos según norma TIA 568-B.
Orden de Ejecución:
Instalación de los Automatización Industrial en la computadora.
Implementación de las tareas y comprobación del correcto funcionamiento de los
equipos.
DESARROLLA UN SISTEMA DE SUPERVISIÓN Y CONTROL PARA UN
PROCESO REMOTO.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 166
En esta actividad vamos a leer los valores de las variables ( tags ) de un controlador
lógico programable empleando un servidor OPC (Proceso Control Ole) de National
Instruments y mediante el programa de automatización LabVIEW diseñaremos una
Interfaz HMI, este tipo de servidores permite enlazar las variables del controlador con
programas de terceros como por ejemplo: Visual Basic o Microsoft Excel. En la primera
parte de esta actividad configuraremos el OPC Server con un cliente, luego enlazaremos
las variables compartidas con el programa Labview.
OPC SERVER. Con el software de LabVIEW es posible programar cualquier controlador
lógico programable (PLC) en una variedad de formas. OPC (OLE for Process Control)
define el estándar para comunicar datos en tiempo real de la planta entre los dispositivos
de control y las interfaces hombre-máquina (IHM). Los servidores OPC están disponibles
virtualmente para todos los PLCs y para PACs (Programmable Automation Controller). En
ésta actividad aprenderemos cómo usar LabVIEW para comunicarse con un PLC
conectado utilizando un OPC. El módulo DSC (Datalogging and Supervisory Control).
Procedimiento:
1. Descargamos el programa NI OPC Server desde la página de National Instruments
desde la siguiente dirección :
Luego de instalar el servidor OPC observaremos que en La barra de tareas se
agregara el icono correspondiente a este servidor

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 167
2. Para realizar la configuración de este servidor, presionamos el botón de inicio y
seleccionamos National Instruments/NI OPC server 2012/ NI OPC Server
Configuration.
3. Para instalar el driver de comunicación primero instalamos un nuevo canal, de la barra
de menú /Devices/ New Channel.
4. Luego de instalar el canal de comunicación, seleccionamos el PLC a configurar desde
la lista desplegable “Device Driver”, en esta actividad comunicaremos un PLC S71200
por lo que seleccionamos Siemens TCP/IP Ethernet, presionamos el botón siguiente.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 168
5. Instalamos el nuevo PLC seleccionando de la barra de menú Edit/ Devices/ New
Device.
6. Instalamos el nuevo PLC seleccionando de la barra de menú Edit/ Devices/ New
Device, podemos personalizar el nombre del dispositivo con el nombre del controlador
a configurar.
7. En pasos anteriores instalamos el driver Siemens TCP/IP Ethernet, ahora escogemos
el controlador S7 1200, de la lista de controladores Siemens “Device Model”.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 169
8. Configuramos la dirección IP del Controlador 192.168.0.5, recordemos que esta
dirección puede ser modificada con la herramienta S7-1200 Tool.
9. En la Ventana S7 Comm Parameters configuramos Link Type: PC (Workstation), Rack
0, slot CPU: 1(configuración predefinida para un PLC 1200). Si configuramos un
controlador S7 300, debemos tener en cuenta el Slot en el que se encuentra instalada
la CPU.
10. Luego de mostrar la ventana de reporte, procedemos a la creación de variables
seleccionando en la barra de menú Edit/Devices/ New Tag, estas variables luego
serán vinculadas con el controlador.
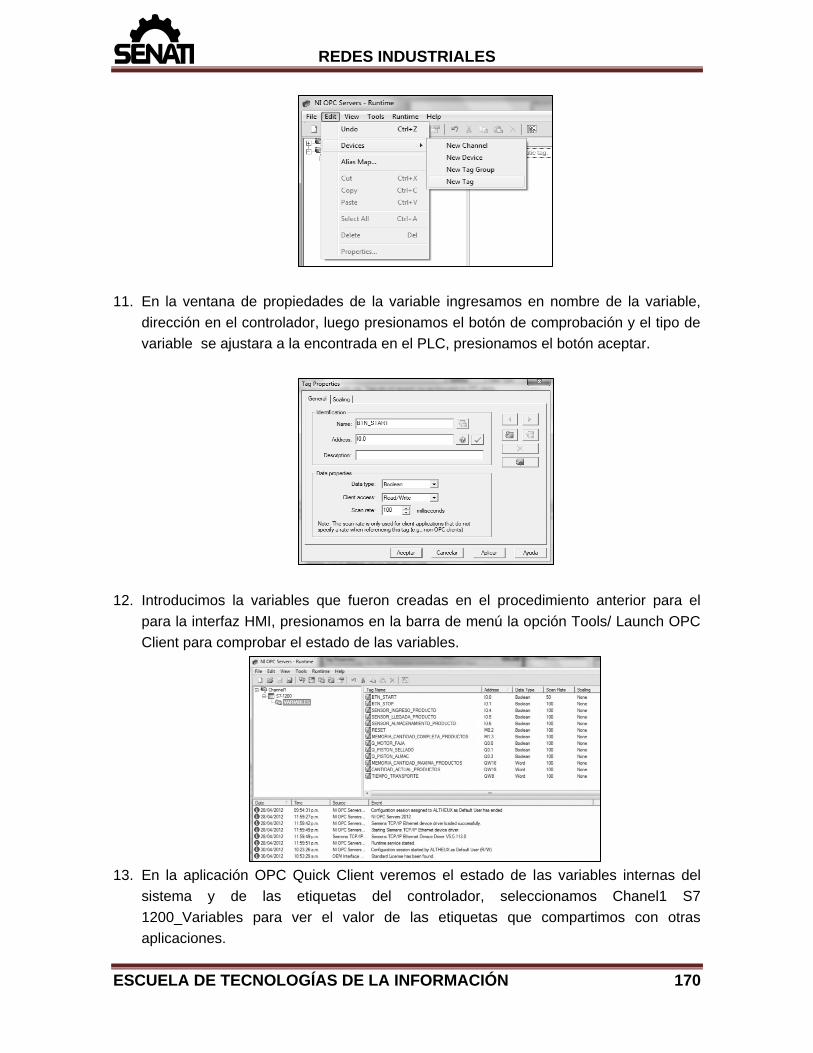
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 170
11. En la ventana de propiedades de la variable ingresamos en nombre de la variable,
dirección en el controlador, luego presionamos el botón de comprobación y el tipo de
variable se ajustara a la encontrada en el PLC, presionamos el botón aceptar.
12. Introducimos la variables que fueron creadas en el procedimiento anterior para el
para la interfaz HMI, presionamos en la barra de menú la opción Tools/ Launch OPC
Client para comprobar el estado de las variables.
13. En la aplicación OPC Quick Client veremos el estado de las variables internas del
sistema y de las etiquetas del controlador, seleccionamos Chanel1 S7
1200_Variables para ver el valor de las etiquetas que compartimos con otras
aplicaciones.
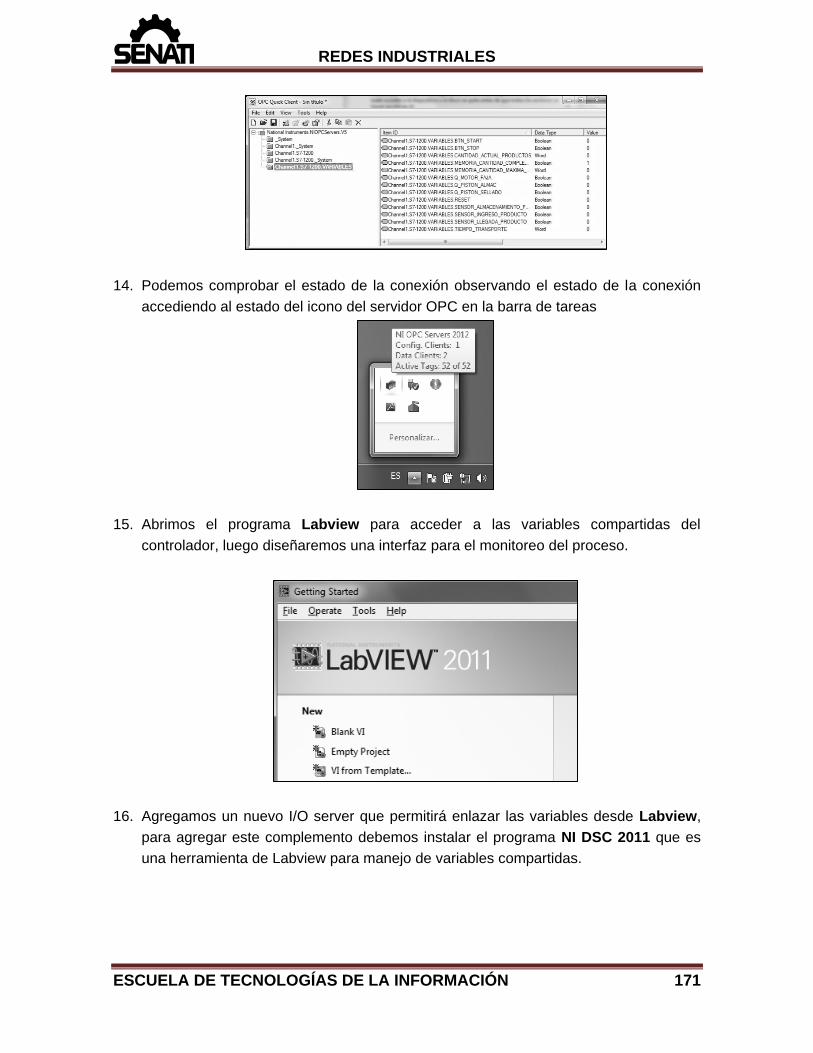
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 171
14. Podemos comprobar el estado de la conexión observando el estado de la conexión
accediendo al estado del icono del servidor OPC en la barra de tareas
15. Abrimos el programa Labview para acceder a las variables compartidas del
controlador, luego diseñaremos una interfaz para el monitoreo del proceso.
16. Agregamos un nuevo I/O server que permitirá enlazar las variables desde Labview,
para agregar este complemento debemos instalar el programa NI DSC 2011 que es
una herramienta de Labview para manejo de variables compartidas.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 172
17. Agregamos un nuevo I/O en el nuevo proyecto, este complemento no se mostrara
cuando instalemos en la computadora NI DSC 2011. El Datalogging and Supervisory
Control (DSC) es un módulo que extiende las características del programa LabVIEW
y permite crear interfaces HMI-SCADA para el monitoreo de sistemas de control.
18. El servidor OPC instalado en esta versión es el NI OPC Server.V5, agregado en la
ventana Settinngs opción “Registered OPC servers”.
19. Luego de instalar el servidor con el que trabajaremos se creara una nueva librería sin
nombre, como procedimiento siguiente accedemos a sus propiedades haciendo clic
derecho y escogemos la propiedad “Create Bound Variables”.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 173
20. Ingresamos a la librería que fue creada previamente en el OPC Server siguiendo la
siguiente ruta: OPC/ Channel1/ S7 1200/ Variables, presionamos el botón “Add” en
cada variable que necesitemos enlazar.
21. Las variables enlazadas se mostraran en la ventana edición para múltiples variables,
veremos el nombre de variable, tipo y propiedades de red.
22. Agregamos al proyecto un nuevo instrumento virtual, en la ventana de este
instrumento agregaremos indicadores y controles que estarán relacionados a las
variables antes agregadas en el proyecto.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 174
23. Un instrumento virtual está compuesto por dos ventanas, el panel frontal y el
diagrama de bloques, en la barra de menú seleccionamos la opción Windows/Show
Block Diagram para trabajar en el diagrama de bloques.
24. Buscamos el sub menú DSC Module en la paleta de funciones.
25. Agregamos la función “Shared Variable”, arrastramos este objeto desde la paleta de
funciones y lo insertamos en el diagrama de bloques, en la parte derecha del bloque
de función ubicamos una flecha para modificar sus propiedades e insertar la variable
compartida BTN_START.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 175
26. En el panel frontal agregamos un indicador luminoso al que denominaremos START,
cada vez que presionamos el botón START en el controlador PLC se encenderá este
indicador.
27. Conectamos la variable compartida BTN_START con el indicador luminoso en el
diagrama de bloques.
28. Para que el indicador luminoso del programa labview reciba el dato en la variable
creada para la librería de este proyecto necesitamos configurar el panel frontal del
proyecto, ejecutamos opción “Shared Variable” en la opción Tools en la barra de
menú del proyecto como se muestra en la figura

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 176
29. En la ventana Front Panel Binding Mass Configuration, buscamos en Open VI el
formulario o panel que creamos para nuestro proyecto, en la lista Binding
Configuration observaremos las variables vinculadas, presionamos el botón de
edición.
30. En la ventana de edición veremos el nombre del control, presionamos el botón
Browse para buscar la fuente de esta variable.
31. La variable que creamos en los pasos anteriores fue compartida para un controlador
que tiene comunicación Ethernet, las variables de este controlador están compartidas
para esta red y enlazada a la librería 1 del proyecto mediante el servidos OPC,
buscamos la variable BTN_START.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 177
32. Luego de seleccionar la variable en la celda “Binding URL” se indicara la ruta en la
que se encuentra vinculado el dato y la librería del proyecto, en este paso finalizamos
el enlace entre el dato del controlador y la aplicación que desarrollamos en labview.
33. Repetimos los pasos anteriores y agregamos las demás variables al proyecto.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 178
Veremos las variables agregadas en el editor múltiple de variables.
34. Configuramos las variables del proyecto con el panel o formulario.
35. Insértanos una imagen que represente al proceso en el que se encuentra instalado el
controlador, luego los indicadores luminosos y numéricos que tendrán relación con
las entradas y salidas de controlador. Una característica al trabajar con variables
compartidas mediante el OPC está que en la parte derecha del control o indicador
aparece una flecha de color verde que nos indica el estado de la variable.
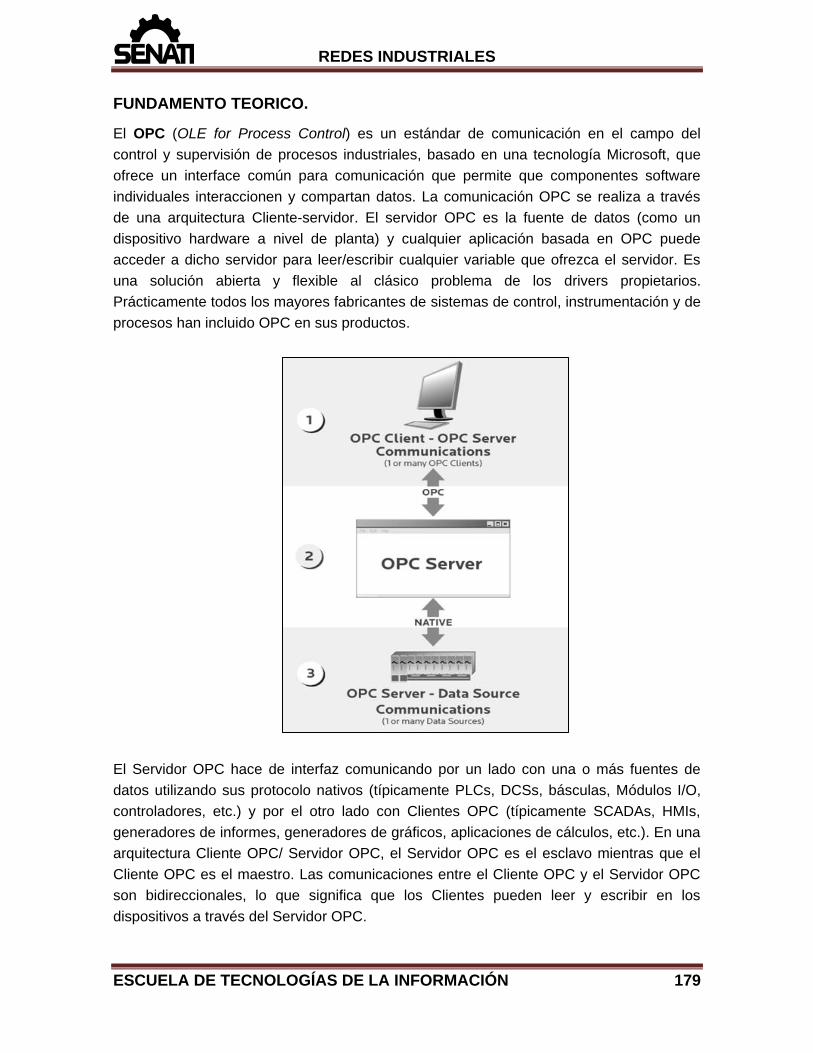
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 179
FUNDAMENTO TEORICO.
El OPC (OLE for Process Control) es un estándar de comunicación en el campo del
control y supervisión de procesos industriales, basado en una tecnología Microsoft, que
ofrece un interface común para comunicación que permite que componentes software
individuales interaccionen y compartan datos. La comunicación OPC se realiza a través
de una arquitectura Cliente-servidor. El servidor OPC es la fuente de datos (como un
dispositivo hardware a nivel de planta) y cualquier aplicación basada en OPC puede
acceder a dicho servidor para leer/escribir cualquier variable que ofrezca el servidor. Es
una solución abierta y flexible al clásico problema de los drivers propietarios.
Prácticamente todos los mayores fabricantes de sistemas de control, instrumentación y de
procesos han incluido OPC en sus productos.
El Servidor OPC hace de interfaz comunicando por un lado con una o más fuentes de
datos utilizando sus protocolo nativos (típicamente PLCs, DCSs, básculas, Módulos I/O,
controladores, etc.) y por el otro lado con Clientes OPC (típicamente SCADAs, HMIs,
generadores de informes, generadores de gráficos, aplicaciones de cálculos, etc.). En una
arquitectura Cliente OPC/ Servidor OPC, el Servidor OPC es el esclavo mientras que el
Cliente OPC es el maestro. Las comunicaciones entre el Cliente OPC y el Servidor OPC
son bidireccionales, lo que significa que los Clientes pueden leer y escribir en los
dispositivos a través del Servidor OPC.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 180
Las aplicaciones necesitan una manera común de acceder a los datos de cualquier
fuente, como un dispositivo o una base de datos.
ARQUITECTURA CLIENTE OPC / SERVIDOR OPC.
Una Arquitectura OPC se refiere a la infraestructura de comunicaciones que incluye uno o
varios Clientes OPC y Servidores OPC comunicándose entre sí. Para mantener una
Arquitectura Cliente / Servidor OPC fácil de leer se utiliza la convención de dibujar el
diagrama de flujo con los Datos fluyendo desde abajo hacia arriba. Los Datos deben fluir
desde las Fuentes de Datos (PLC, DCS, RTU, Básculas, Protocolos, Bases de Datos,
Hojas de Cálculo, etc.) hacia la Aplicación que utilizará los Datos (SCADAs, Bases de
Datos Relacionales, HMIs, Historiadores, Servidores Web, Hojas de Cálculo, etc.).
Cliente OPC: En éste ejemplo, si la Aplicación Cliente tiene incorporado un Cliente OPC
(Por ejemplo Aplicaciones SCADA, HMI o Aplicaciones VB utilizando librerías OPC DA),
no será necesario un Cliente OPC Externo. Aprenda más sobre Clientes OPC y
Servidores OPC.
Comunicación OPC: A partir de las Especificaciones OPC definidas por la OPC
Foundation, existen diferentes especificaciones para permitir la comunicación de
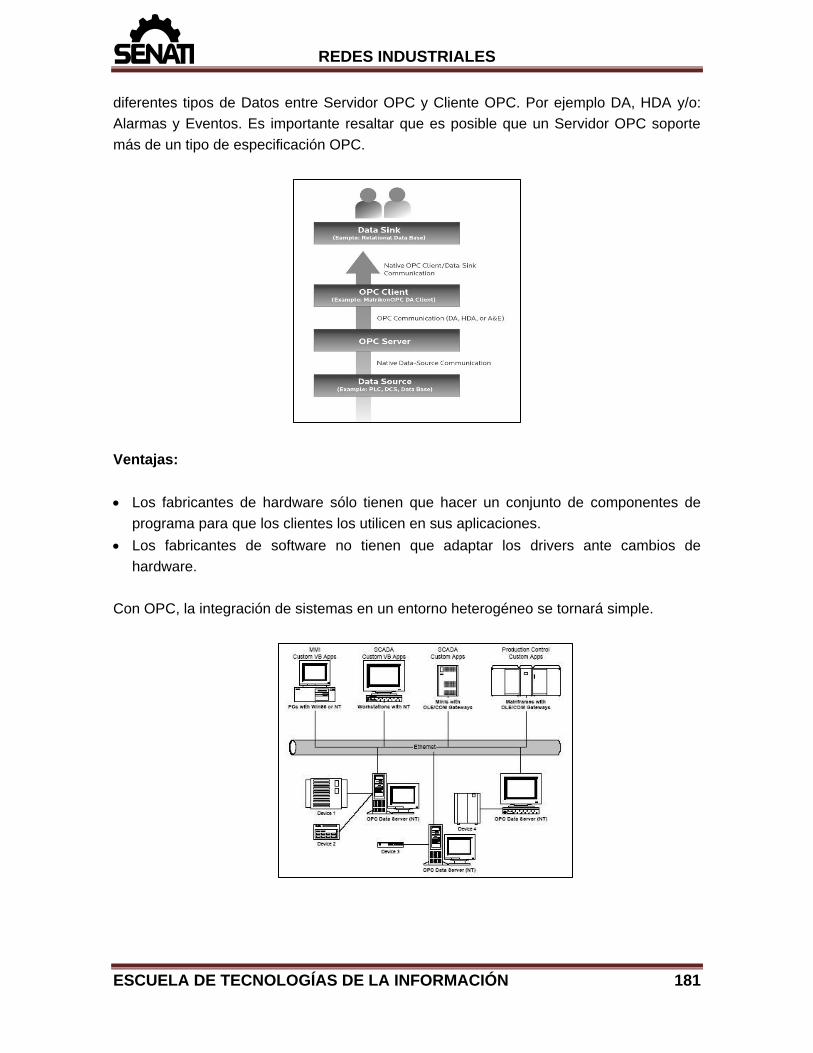
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 181
diferentes tipos de Datos entre Servidor OPC y Cliente OPC. Por ejemplo DA, HDA y/o:
Alarmas y Eventos. Es importante resaltar que es posible que un Servidor OPC soporte
más de un tipo de especificación OPC.
Ventajas:
Los fabricantes de hardware sólo tienen que hacer un conjunto de componentes de
programa para que los clientes los utilicen en sus aplicaciones.
Los fabricantes de software no tienen que adaptar los drivers ante cambios de
hardware.
Con OPC, la integración de sistemas en un entorno heterogéneo se tornará simple.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 182
ACCESO DE DATOS OPC.
Compuesto por varios elementos:
El servidor (server).
Mantiene información sobre el servidor.
Sirve como container para objetos del grupo OPC.
El grupo (group).
Mantiene información sobre sí mismo.
Provee mecanismos para contener/organizar lógicamente ítems.
El elemento (item).
Representan conexiones a fuentes de datos dentro de un servidor.
GESTIÓN DE ALARMAS Y EVENTOS.
Alarma:
Es una condición anormal; caso especial de condición.
Una condición es un estado concreto del Servidor de Eventos OPC o de uno de los
objetos contenidos por dicho servidor, que puede resultar de interés para sus clientes.
Evento:
Es un suceso detectable que es significativo para un servidor OPC, para el aparato al
que representa y para sus Clientes OPC.
Puede estar o no asociado a una condición.
ACCESO A DATOS HISTÓRICOS.
Distintos tipos de servidores históricos:
Servidores de datos simples.
Ofrecen solo capacidad de almacenar datos.
Servidores de análisis y compresión de datos complejos.
Ofrecen capacidad de compresión y almacenaje de datos.
Ofrecen funciones de análisis de datos.
Pueden actualizar datos y tener un resumen de actualizaciones.
APLICACIONES OPC.
Diseñado principalmente para acceder a datos de un servidor en red.

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 183
Distintas aplicaciones: nivel más bajo pueden coger datos de aparatos físicos y llevarlo
a SCADA o DCS, o de un servidor SCADA o DCS a una aplicación.
ARQUITECTURA GENERAL Y COMPONENTES.
Dos tipos de interfaces.
Interfaces Custom (obligatorio, C/C++).
Interfaces de Automatización (opcional, VB).
OPC especifica la interfaz COM, como: “Lo que la interfaz es y su aplicación y no su
implementación”. Especifica el comportamiento esperado que proporciona la interfaz ante
el uso y/o aplicaciones del cliente.
Implementación de funciones de interfaces.
Obligatorio: Funcionalidades indispensables.
Opcional: Funcionalidades añadidas.
La arquitectura OPC es un modelo Cliente-Servidor donde el Servidor OPC proporciona
una interfaz al objeto OPC y lo controla. Una aplicación cliente OPC se comunica a un
servidor OPC a través de un cliente OPC específico por medio de una interfaz de
automatización. El servidor OPC lleva a cabo la interfaz cliente, y opcionalmente lleva a
cabo la interfaz de automatización
TIPOS DE SERVIDORES OPC.
Existen cuatro tipos de servidores OPC definidos por la OPC Foundation, y son los
siguientes:
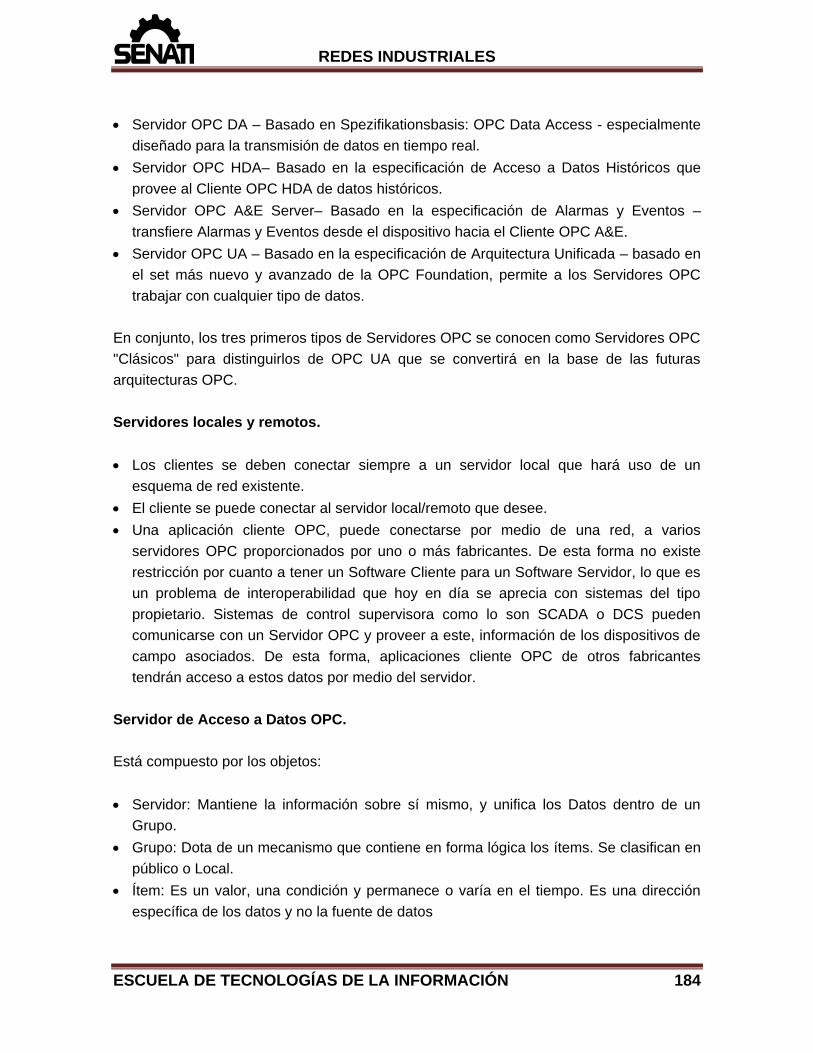
REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 184
Servidor OPC DA – Basado en Spezifikationsbasis: OPC Data Access - especialmente
diseñado para la transmisión de datos en tiempo real.
Servidor OPC HDA– Basado en la especificación de Acceso a Datos Históricos que
provee al Cliente OPC HDA de datos históricos.
Servidor OPC A&E Server– Basado en la especificación de Alarmas y Eventos –
transfiere Alarmas y Eventos desde el dispositivo hacia el Cliente OPC A&E.
Servidor OPC UA – Basado en la especificación de Arquitectura Unificada – basado en
el set más nuevo y avanzado de la OPC Foundation, permite a los Servidores OPC
trabajar con cualquier tipo de datos.
En conjunto, los tres primeros tipos de Servidores OPC se conocen como Servidores OPC
"Clásicos" para distinguirlos de OPC UA que se convertirá en la base de las futuras
arquitecturas OPC.
Servidores locales y remotos.
Los clientes se deben conectar siempre a un servidor local que hará uso de un
esquema de red existente.
El cliente se puede conectar al servidor local/remoto que desee.
Una aplicación cliente OPC, puede conectarse por medio de una red, a varios
servidores OPC proporcionados por uno o más fabricantes. De esta forma no existe
restricción por cuanto a tener un Software Cliente para un Software Servidor, lo que es
un problema de interoperabilidad que hoy en día se aprecia con sistemas del tipo
propietario. Sistemas de control supervisora como lo son SCADA o DCS pueden
comunicarse con un Servidor OPC y proveer a este, información de los dispositivos de
campo asociados. De esta forma, aplicaciones cliente OPC de otros fabricantes
tendrán acceso a estos datos por medio del servidor.
Servidor de Acceso a Datos OPC.
Está compuesto por los objetos:
Servidor: Mantiene la información sobre sí mismo, y unifica los Datos dentro de un
Grupo.
Grupo: Dota de un mecanismo que contiene en forma lógica los ítems. Se clasifican en
público o Local.
Ítem: Es un valor, una condición y permanece o varía en el tiempo. Es una dirección
específica de los datos y no la fuente de datos

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 185
Servidor de Alarmas, Condiciones y Eventos OPC.
Provee de Interfaces, donde Clientes OPC son notificados de Sucesos. Estos
mecanismos se definen como:
Alarma: Condición anormal de un sistema, por lo que es un caso especial de esta.
Condición: Estado nombrado evento por contener condiciones asociadas a una
etiqueta como HighAlarm, Normal, LowAlarm.
Evento: Ocurrencia perceptible, de importancia al servidor OPC, de los dispositivos que
representa o de sus dispositivos OPC
Servidor de Acceso a Datos Históricos OPC (OPC HDA).
Provee de una interfaz Cliente OPC de Acceso a Datos Históricos, que facilita el uso de
aplicaciones de acceso a datos. Características: Arquitectura de comunicación abierta y
eficaz, concentrada en el acceso a datos y no en los tipos de datos. Propósito: Permite
que aplicaciones (MS Office, Objetos WWW) accedan a datos de un dispositivo o un
banco de datos “In process”. Facilita el desarrollo de aplicaciones sin sacrificar la
funcionalidad de la Interfaz Cliente.
Intercambio de Datos OPC (OPC DX).
Define un conjunto de interfaces que permiten el intercambio de datos, así como la
comunicación "server to server" entre dispositivos y controladores conectados a Ethernet,
que utilizan distintos protocolos. OPC-DX permite a los servidores OPC-DA intercambiar
directamente datos sin la exigencia de un cliente OPC intermedio. La mejor manera de
pensar en un servidor OPC-DX es como un servidor OPC-DA que se puede configurar
para intercambiar datos con otros servidores OPC-DA. Como es el caso de otros
servidores OPC, el cliente aún se utiliza para configurar, controlar y vigilar este
intercambio de datos.
Acceso de Datos XML (OPC XML DA).
Se está convirtiendo en el método estándar para el intercambio de datos entre las
aplicaciones de empresa y son cada vez más un proceso de control de entornos. OPC
XML-DA salió a la luz en 2003 tras varios años de desarrollo, y ofrece un interfaz Simple
Object Application Protocol (SOAP) para los objetos OPC DA 2.0/3.0. Esto permite a las
aplicaciones cliente ser escritas en Java, Perl, Python, y otros idiomas que soporta SOAP.
SOAP y XML Web Services utiliza Protocolo de transferencia de hipertexto (HTTP) y los
mecanismos de transporte y, además, proporciona una plataforma neutral más adecuada
para el tráfico con base en Internet, en comparación con tecnologías como DCOM. Sin
embargo, debido a las limitaciones de rendimiento posible, OPC XML-DA es poco

REDES INDUSTRIALES
ESCUELA DE TECNOLOGÍAS DE LA INFORMACIÓN 186
probable que se utilice para aplicaciones en tiempo real, a pesar de que normalmente se
usa de puente entre la empresa y la red de control.
Arquitectura Unificada OPC (OPC UA).
Refleja el objetivo de Microsoft de retirar DCOM en favor de .NET y arquitecturas
orientadas a servicio. OPC UA integra la funcionalidad de las anteriores especificaciones
(OPC DA, OPC-HDA, OPC A & E, OPC-DX, etc.). OPC UA abandona COM / DCOM en
favor de dos transportes: SOAP / HTTP (S) y un mensaje binario codificado en la parte
superior de TCP. Es prematuro evaluar la seguridad de OPC UA en relación con DCOM,
ya que la API OPC UA de seguridad aún está en desarrollo. Sin embargo, dado que ahora
existe una mayor conciencia en la OPC Foundation, proveedores OPC, y Microsoft para la
necesidad de seguridad, hay poca duda de que .NET proporcionará una base más segura
que COM / DCOM. También hacen mucho más sencillo el desarrollo de clientes y
servidores OPC en plataformas que no sean de Microsoft.
Seguridad.
Existen tres niveles de seguridad OPC.
Seguridad Inválida: Libre acceso entre Cliente/Servidor.
Seguridad DCOM: Clientes seleccionados tienen acceso limitado a servidores OPC. No
hay un control total sobre sistemas operativos como Linux, Unix.
Seguridad OPC: El Servidor OPC sirve como un regulador de control de acceso a
fabricantes de sistemas operativos como Linux y Unix sobre objetos específicos de
acceso restringido que son expuestos por el Servidor OPC, a continuación los
principales fabricantes


















