
Quasi-Newton Differential Dynamic Programming for Robust Low-Thrust Optimization
26
Quasi-Newton Differential Dynamic Programming for Robust Low-Thrust Optimization Etienne Pellegrini and Ryan P. Russell AIAA/AAS Astrodynamics Specialists Conference Minneapolis, MN, 8/13/12
-
Upload
etienne-pellegrini -
Category
Technology
-
view
257 -
download
3
Transcript of Quasi-Newton Differential Dynamic Programming for Robust Low-Thrust Optimization

Quasi-Newton Differential Dynamic Programming for Robust Low-Thrust Optimization
Etienne Pellegrini and Ryan P. Russell
AIAA/AAS Astrodynamics Specialists Conference
Minneapolis, MN, 8/13/12
Summary
• Introduction
• The Hybrid Differential Dynamic Programming (HDDP) Algorithm [Lantoine & Russell]
– State-Transition Matrices
• Quasi-Newton methods
– Application to HDDP
– The SR1 update
• Results
– 1D Landing
– 2D Spacecraft Problem [Bryson & Ho]
– Complete set of test problems
• Conclusions & Future work
2 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN

State of the Art
Low thrust trajectories
Highly nonlinear, constrained problems
Need for specific and efficient NLP solvers
• DDP methods were introduced in late 60s [Mayne, Jacobson]
• Static/Dynamic Algorithm: uses Hessian shifting [Whiffen]
• HDDP: uses State-Transition Matrices approach
Motivation for this paper:
High computational intensity for all those methods.
3 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN
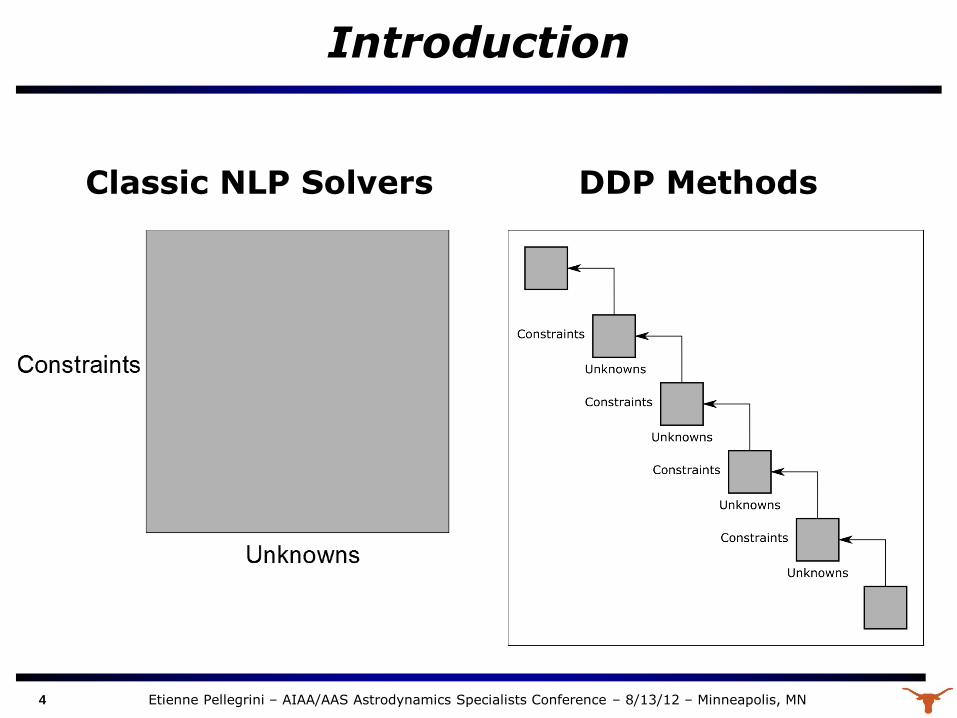
Classic NLP Solvers DDP Methods
Introduction
4 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN

Classic NLP Solvers HDDP Method
Introduction
5 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN

The HDDP algorithm
6 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN

The HDDP algorithm: STM approach
Sensitivities are obtained using the STMs
• Initialize 𝐽𝑥,𝑁∗ (𝑥) and 𝐽𝑥𝑥,𝑁
∗ (𝑥)
• 𝐽𝑥,𝑘 𝑥, 𝑢 and 𝐽𝑥𝑥,𝑘(𝑥, 𝑢) are
obtained from backward mapping of 𝐽𝑥,𝑘+1
∗ (𝑥) and
𝐽𝑥𝑥,𝑘+1∗ (𝑥)
• The control law allows to deduce state only sensitivities 𝐽𝑥,𝑘
∗ (𝑥) and 𝐽𝑥𝑥,𝑘∗ (𝑥)
7 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN

• Decouples the optimization step from the propagation step
– Allows for parallelization of the computation
– Allows for approximations to the partial derivatives
• Forward sweep:
– n equation for the state
– n2 equations for the 1st order STM
– n3 equations for the 2nd order STM
• Propagation of the STMs takes more than 80% of the compute time
• Necessitates the user to provide the second-order partial derivatives of the state dynamics
8 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN
The HDDP algorithm: STM approach

• Introduced in 1959 [Davidon]
• Used in many optimization applications
• Aim: approximating the curvature of the problem
Estimating the Hessian of the objective function
• Classical approach
– Gradient and estimate of the Hessian used to define a search direction
– Step chosen with a line search or trust region method
– Estimate of the Hessian is updated
• Estimate of the Hessian has to be positive definite
9
Quasi-Newton Methods
Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN
Application to HDDP: estimating 𝚽𝟐,𝒌
• Different from traditional quasi-Newton:
– Not as suitable to estimate the Hessian of the cost function
– Estimates the 2nd order STM
Results in changes to the traditional methods
– No enforcement of the positive definiteness
– Requires a quasi-Newton update that approximates the Hessian accurately
– Step decided by the propagation of the new control law
– The 2nd order STM is a tensor composed of n Hessians
n quasi-Newton updates to apply
• Computation of the STM is decoupled: the optimization steps are untouched
• The user does not need to provide 2nd order derivatives
10 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN

SR1 Update
• Variety of quasi-Newton updates have been developed
– BFGS, DFP, Powell’s Damped BFGS, SR1, etc…
• Most of them: enforce positive definiteness of the estimate
– In classical quasi-Newton framework, a descent direction is needed
– In our application: we don’t need the estimate to be pos. def.
• Symmetric Rank 1 update
– Does not enforce convexity
– Results in estimates closer to the true Hessian [Conn et al.]
11 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN

Results: Framework
• Tested on a set of 6 fixed final time problems
• Implemented using Matlab. Similar results are expected using another programming language
• Metric to evaluate how accurate the Hessian estimates are:
[Khalfan et al.]
• Average taken on every stage and every state.
12 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN

Results: 1D Landing
13 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN
Run time Iterations
HDDP 22.95 11
QHDDP 7.19 11
Controls obtained with HDDP and QHDDP States and controls found by QHDDP
• 3 states: vertical position and velocity, and fuel
• 1 control: thrust
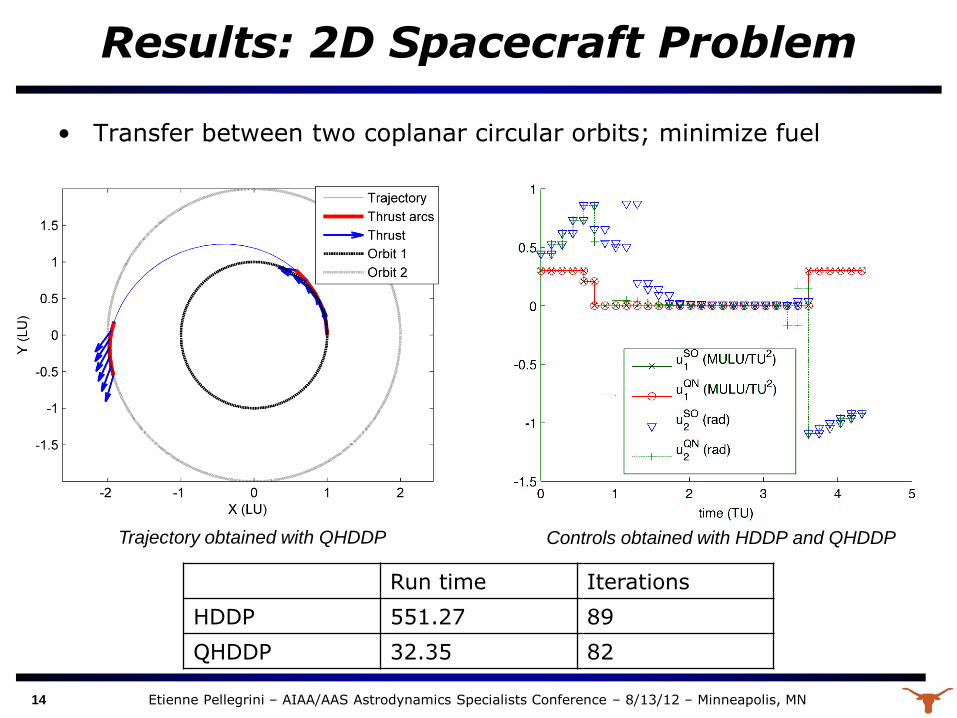
Results: 2D Spacecraft Problem
• Transfer between two coplanar circular orbits; minimize fuel
14 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN
Trajectory obtained with QHDDP Controls obtained with HDDP and QHDDP
Run time Iterations
HDDP 551.27 89
QHDDP 32.35 82

Metric value for 4 different strategies Run time for different strategies
Other
Results: 2D Spacecraft Problem
• Different scenarios: Test of a restart strategy
Trade-off between confidence in the estimate and computation time
• NB: User has to provide 2nd order derivatives again
15 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN

• Similar problem, longer time of flight (35 TU), lower maximum thrust (0.05 MU.LU/TU2)
• Bang-bang structure as expected
Results: Multi-Rev Spacecraft Problem
16 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN
Thrust and eccentricity (QHDDP)
0 10 20 30
0.06
0.04
0.2
0
Thru
st
(MU
LU
/TU
2)
0.3
0.2
0.1 0
Eccentr
icity
Trajectory found by QHDDP

Results: Complete Set
• Comparison of all test cases
• Metric: 2nd order STM well approximated for most cases
• Run time: show that the baseline case is mostly faster
17 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN
Timings for all test cases Metric for all text cases

Conclusions
• Possibility of restarting the estimate with the real STM in order to improve confidence
Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN
18
• Propagation becomes 5.4 to 30 times faster
• Total computation time becomes 2.8 to 17 times faster

Future Work
• Testing on representative space trajectories
• Use of multi-step quasi-Newton methods
• Other updates
• Integration of numerical differencing or complex step differentiation
• Parallelization of the propagation
19 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN

Thank you for your attention
20 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN

Backup Slides
21 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN
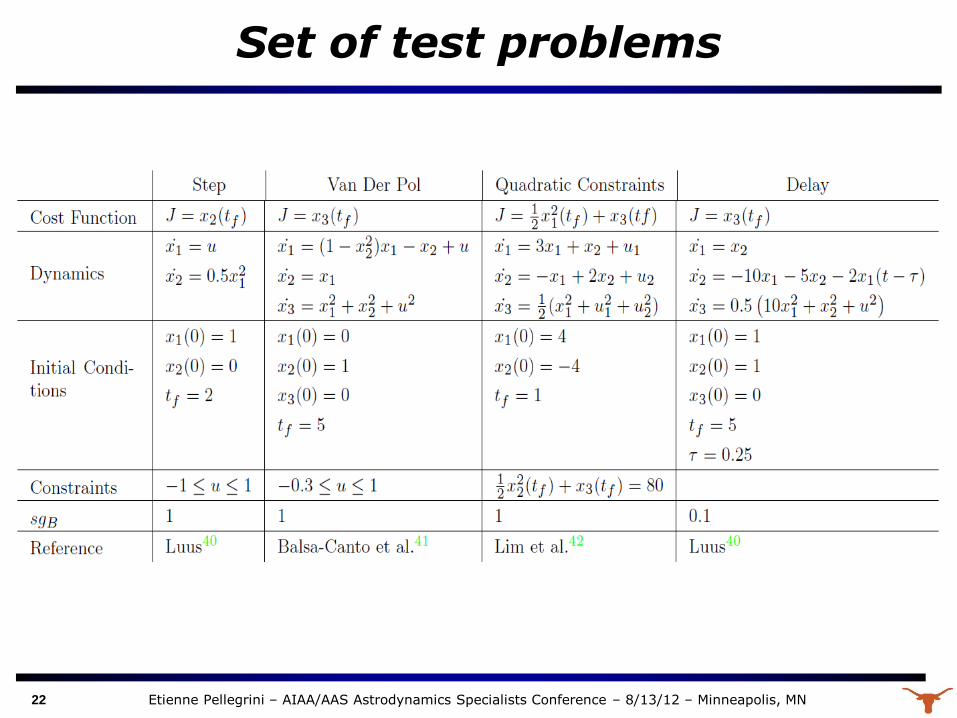
Set of test problems
22 Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN
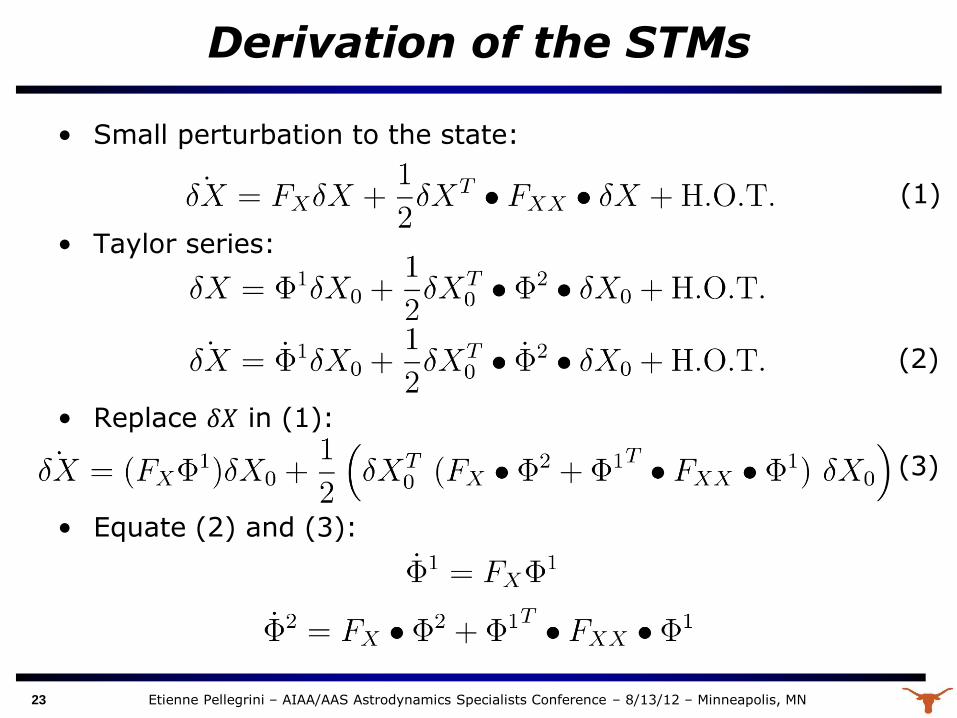
• Small perturbation to the state:
(1)
• Taylor series:
(2)
• Replace 𝛿𝑋 in (1):
(3)
• Equate (2) and (3):
23
Derivation of the STMs
Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN

• Taylor series:
• Quasi-Newton equation:
• Rank-1 update:
• Because 𝑎𝑢𝑇Δ𝑌𝑝 is a scalar:
• Finally:
24
Derivation of the SR1 update
Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN

• 𝐽𝑋,𝑘𝑖 and 𝐽𝑋𝑋,𝑘
𝑖 are function of the downstream control law
(𝑢𝑞, 𝑘 + 1 ≤ 𝑞 ≤ 𝑁)
• They are only accurate for a trajectory that follows exactly this control law
• In HDDP, the next iteration changes the downstream
control law 𝐽𝑋,𝑘𝑖 and 𝐽𝑋𝑋,𝑘
𝑖 do not hold information about
the new performance index 𝐽𝑖
• The quasi-Newton equation does not hold, even with exact second-order derivatives
• Applying a quasi-Newton method, which enforces this
quasi-Newton equation, can not predict the right 𝐽𝑋𝑋,𝑘𝑖+1
25
Why not apply quasi-Newton to 𝑱𝑿𝑿
computation?
Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN
“An optimal policy has the property that whatever the initial state and initial decision are, the remaining decisions must constitute an optimal policy with regard to the state resulting from the first decision.”
Bellman, R., Dynamic Programming, Princeton University Press, Princeton, New Jersey, 1957.
26
Bellman’s Principle of Optimality
Etienne Pellegrini – AIAA/AAS Astrodynamics Specialists Conference – 8/13/12 – Minneapolis, MN


















